Машина и устройство для контролирования состояния предохранительного подшипника машины - RU2504701C2
Код документа: RU2504701C2
Чертежи






Описание
Изобретение относится к способу контролирования состояния предохранительного подшипника машины.
Для опоры вращающегося вала ротора машины в настоящее время все чаще используются магнитные подшипники для опоры вала ротора во время работы, которые удерживают вращающийся вал ротора во взвешенном состоянии с помощью магнитных полей. При отказе магнитного подшипника, например, вследствие отсутствия подачи тока, вал ротора падает в предохранительный подшипник и улавливается им. Таким образом, предохранительный подшипник служит для улавливания вала ротора. До полной остановки вала ротора предохранительный подшипник временно обеспечивает опору роторного вала. Предохранительные подшипники должны, с одной стороны, выдерживать удар при падении вращающегося роторного вала в предохранительный подшипник и, с другой стороны, обеспечивать надежный выбег роторного вала в предохранительном подшипнике. Для этого кольцо предохранительного подшипника имеет немного больший по сравнению с диаметром роторного вала внутренний диаметр, так что роторный вал при нормальной работе, т.е. при активном магнитном подшипнике, не соприкасается с предохранительным подшипником. Обычно предохранительный подшипник установлен в зоне соответствующего конца роторного вала в корпусе статора машины.
При улавливании роторного вала предохранительный подшипник подвергается значительным нагрузкам, которые приводят к износу предохранительного подшипника. За счет износа сокращается срок службы предохранительного подшипника, при этом в худшем случае предохранительный подшипник из-за большого износа, который может возникать при одном единственном выбеге роторного вала в предохранительном подшипнике, уже после единственного падения вала в предохранительный подшипник больше не применим для другого падения. Предохранительные подшипники установлены в машине, и, как правило, их нельзя там контролировать без демонтажа частей машины. Таким образом, нельзя надежно устанавливать оптимальный момент для замены дефектного или ухудшенного предохранительного подшипника. При превышении заданного количества падений роторного вала в предохранительный подшипник, например пяти падений, необходимо заменять предохранительный подшипник. Однако предохранительный подшипник может быть изношен уже при менее чем пяти падениях или же может выдерживать значительно больше падений. В первом случае может происходить отказ предохранительного подшипника, во втором случае приводить к ненужным и дорогостоящим простоям машины для замены недефектных или неизношенных предохранительных подшипников.
Из US 4982126 А известны магнитный подшипник для установки роторного вала, вспомогательный подшипник и способ для улавливания роторного вала при выходе из строя магнитного подшипника. Способ предусматривает введение жидкости во вспомогательный подшипник, например, когда измеренная сенсором температура вспомогательного подшипника превышает предварительно заданную температуру.
Задачей изобретения является обеспечение возможности контролирования состояния установленного в машине предохранительного подшипника.
Эта задача решена с помощью способа контролирования состояния предохранительного подшипника машины, при этом предохранительный подшипник улавливает роторный вал машины при выходе из строя магнитного подшипника машины, при этом предохранительный подшипник имеет наружное кольцо и расположенное с возможностью вращения относительно наружного кольца внутреннее кольцо, при этом для контроля состояния предохранительного подшипника выключают магнитный подшипник и роторный вал приводят во вращательное движение с заданным ходом движения, для чего роторный вал приводят во вращение посредством машины, которая управляется за счет вышестоящего управления, и при этом с помощью датчика измеряют физическую величину предохранительного подшипника.
Кроме того, задача решена с помощью машины, при этом машина имеет магнитный подшипник и предохранительный подшипник, при этом предохранительный подшипник улавливает роторный вал машины при отказе магнитного подшипника, при этом предохранительный подшипник имеет наружное кольцо и расположенное с возможностью вращения относительно наружного кольца внутреннее кольцо, при этом для контроля состояния предохранительного подшипника предусмотрена возможность выключения магнитного подшипника, при этом предусмотрена возможность приведения во вращательное движение роторного вала при выключенном магнитном подшипнике с заданным ходом движения, для чего роторный вал соответственно приводят в движения посредством машины, которая выполнена с возможностью управления за счет вышестоящего управления, при этом машина имеет датчик, предназначенный для измерения физической величины предохранительного подшипника.
Изобретение обеспечивает возможность контролирования состояния предохранительного подшипника и распознавания необходимости замены предохранительного подшипника из-за слишком сильного износа.
Предпочтительные варианты выполнения изобретения следуют из зависимых пунктов формулы изобретения.
Предпочтительные варианты выполнения способа следуют аналогично из предпочтительных вариантов выполнения машины, и наоборот.
Предпочтительно, когда физическая величина или производная от физической величины величина сравнивается с заданной величиной и если отклонение физической величины или производной величины от заданной величины превышает предельное значение, то создается предупреждающее сообщение. За счет этого обеспечивается возможность автоматического распознавания изношенного предохранительного подшипника и автоматического информирования, например, оператора машины или обслуживающего персонала, когда предохранительный подшипник изношен.
Кроме того, предпочтительно, когда для крепления предохранительного подшипника в машине вокруг наружного кольца расположена опора предохранительного подшипника, при этом датчик расположен на обращенной к опоре предохранительного подшипника стороне наружного кольца. В этом месте можно особенно хорошо измерять физическую величину.
Кроме того, предпочтительно, когда физическая величина представлена в виде температуры предохранительного подшипника, или в виде возникающей между наружным кольцом и опорой предохранительного подшипника силы, или в виде колебаний предохранительного подшипника, или в виде возникающего между наружным кольцом и опорой предохранительного подшипника давления. Температура, сила, давление или колебания представляют обычные физические величины предохранительного подшипника, которые изменяются с увеличивающимся износом предохранительного подшипника.
Кроме того, предпочтительно, когда датчик расположен между наружным кольцом и опорой предохранительного подшипника, поскольку в этом случае передаваемую с предохранительного подшипника на опору предохранительного подшипника силу можно особенно хорошо определять.
Кроме того, предпочтительно, когда датчик выполнен плоским и заделан в пленку или расположен на пленке, поскольку в этом случае датчик можно особенно простым образом устанавливать в машине.
Кроме того, предпочтительно, когда для крепления предохранительного подшипника в машине вокруг наружного кольца расположена опора предохранительного подшипника, при этом наружное кольцо имеет на своей обращенной к опоре предохранительного подшипника стороне выемку, в которой расположена по меньшей мере часть датчика. В выемке датчик может быть расположен особенно простым образом.
Кроме того, предпочтительно, когда физическая величина представлена в виде расстояния между наружным кольцом и внутренним кольцом. Расстояние между наружным кольцом и внутренним кольцом представляет обычную физическую величину предохранительного подшипника, которая изменяется с увеличением износа предохранительного подшипника.
В этой связи предпочтительно, когда по меньшей мере часть датчика расположена внутри наружного кольца. Внутри наружного кольца датчик может быть расположен особенно простым образом.
Кроме того, предпочтительно, когда между наружным кольцом и внутренним кольцом расположено тело качения или когда внутреннее кольцо скользит непосредственно в наружном кольце. Эти варианты выполнения представляют обычные варианты выполнения предохранительного подшипника.
Кроме того, предпочтительно, когда физическая величина передается через соединение для передачи данных в расположенное вдали от машины вычислительное устройство. За счет этого обеспечивается возможность дистанционного контролирования предохранительного подшипника.
Кроме того, предпочтительно, когда обеспечивается возможность сравнения физической величины или величины, производной от физической величины, с заданной величиной, и если отклонение физической величины или производной величины от заданной величины превышает предельное значение, то предусмотрена возможность создания предупреждающего сообщения.
За счет этого обеспечивается возможность автоматического распознавания изношенного предохранительного подшипника и автоматического информирования, например, оператора машины или обслуживающего персонала, когда предохранительный подшипник изношен.
Машина может быть выполнена, например, в виде электродвигателя, или генератора, или компрессора, или нагнетателя, или в виде турбины. Машина может быть выполнена, в частности, в виде ветрового генератора.
Ниже приводится подробное пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг.1 - машина согласно изобретению с предохранительным подшипником;
фиг. 2 - разрез предохранительного подшипника и опоры подшипника согласно одному варианту выполнения изобретения;
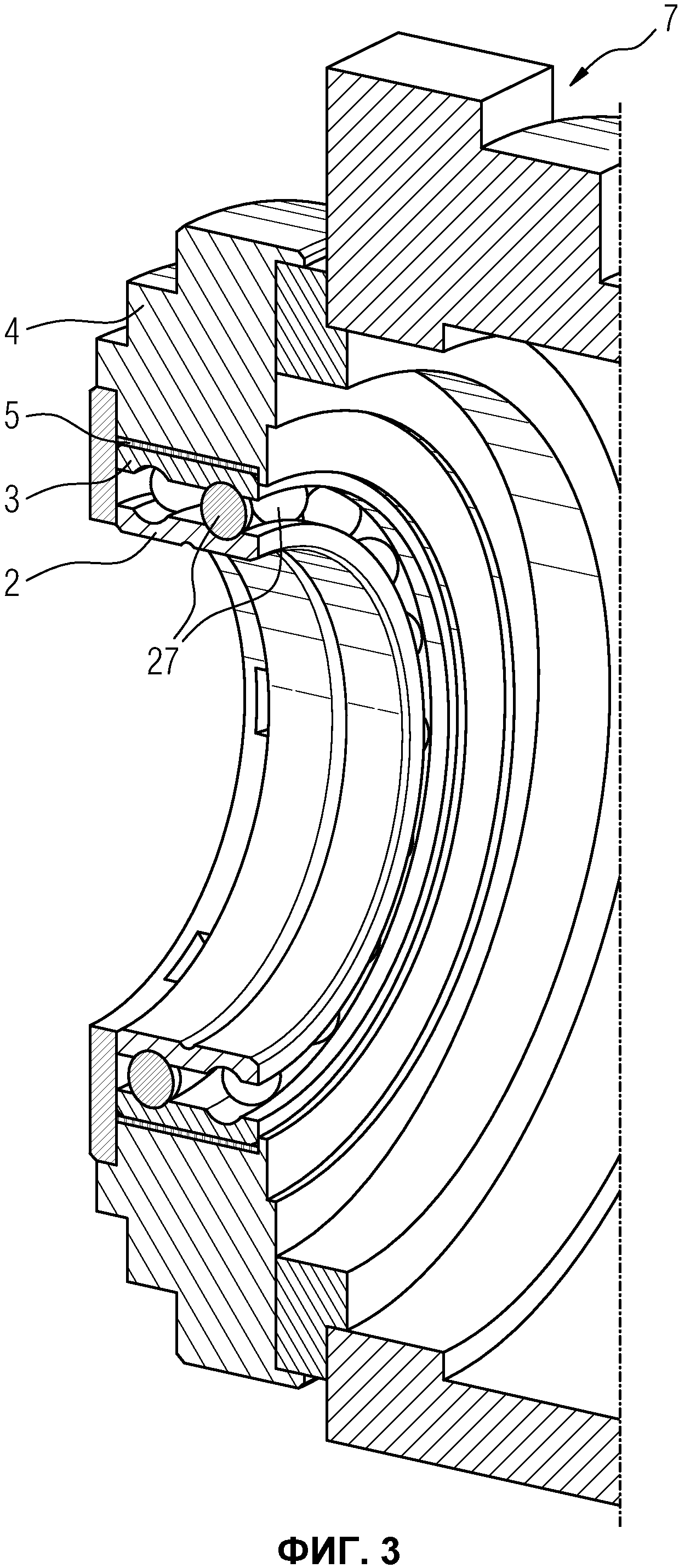
фиг. 3 - разрез предохранительного подшипника и опоры подшипника согласно другому варианту выполнения изобретения;
фиг. 4 - предохранительный подшипник и опора подшипника согласно другому варианту выполнения изобретения;
фиг.5 - схема выполнения способа согласно изобретению;
фиг.6 - первый вариант выполнения сенсорной пленки;
фиг.7 - второй вариант выполнения сенсорной пленки;
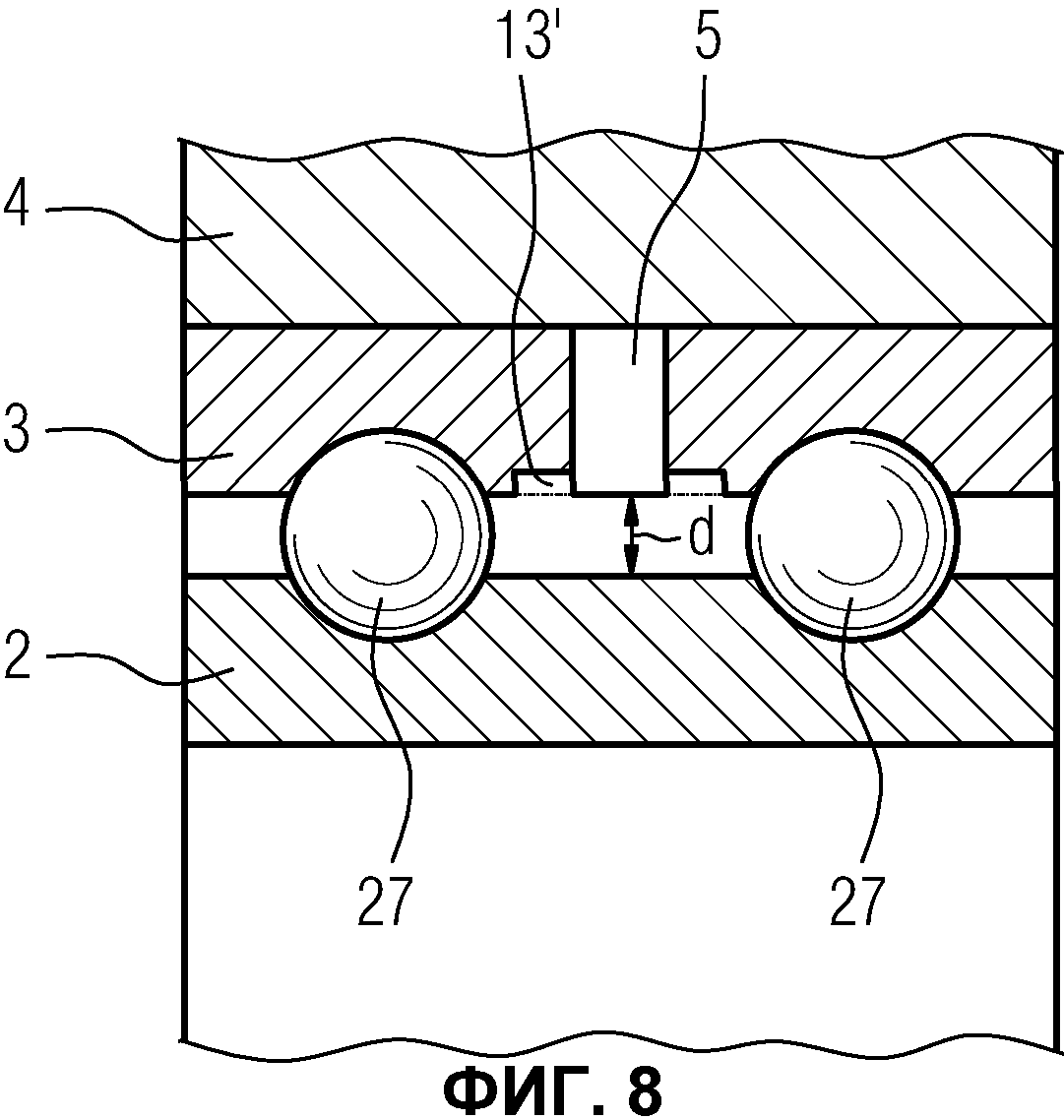
фиг. 8 - предохранительный подшипник и опора подшипника согласно другому варианту выполнения изобретения;
фиг.9 - схема управления машиной.
На фиг.1 схематично показаны существенные для понимания
изобретения элементы машины 12, которая в рамках примера выполнения выполнена в виде электродвигателя. Другие элементы машины, такие как, например, ярмо ротора и т.д., для ясности и как не существенные для понимания изобретения не изображены на фиг.1. Машина 12 имеет расположенный с возможностью вращения, опирающийся на магнитный подшипник 6 роторный вал 1, который при работе машины 12 вращается вокруг оси R вращения.
Магнитный подшипник 6 удерживает роторный вал 1 с помощью регулируемого магнитного поля во взвешенном состоянии в воздушном зазоре 21. Для этого магнитный подшипник имеет в качестве существенных элементов катушки для создания магнитного поля.
Наряду с магнитным подшипником 6 машина 12 имеет предохранительный подшипник 14, который при отказе магнитного подшипника 6 улавливает роторный вал 1, когда он падает в предохранительный подшипник 14, и осуществляет опору роторного вала 1 до остановки роторного вала 1. Такой отказ магнитного подшипника 6 может происходить, например, при отсутствии электроснабжения машины 12 и тем самым магнитного подшипника 6.
Предохранительный подшипник 14 имеет наружное кольцо 3 и расположенное с возможностью вращения относительно наружного кольца 3 внутреннее кольцо 2. Для крепления предохранительного подшипника 14 в машине 12 вокруг наружного кольца 3 расположена опора 4 предохранительного подшипника, при этом в рамках примера выполнения опора 3 предохранительного подшипника выполнена кольцеобразной и расположена вокруг наружной стороны наружного кольца 3. Для крепления предохранительного подшипника 14 предохранительный подшипник 14 вводится в опору 4 предохранительного подшипника.
Кроме того, машина 12 имеет неподвижный корпус 28 машины, на котором закреплена опора 4 предохранительного подшипника, при этом крепление между опорой 4 предохранительного подшипника и корпусом 28 машины для ясности не изображено.
Между внутренним кольцом 2 и роторным валом 1 расположен воздушный зазор 22, который несколько шире, чем воздушный зазор 21. Таким образом, при включенном и правильно работающем магнитном подшипнике 6 внутреннее кольцо 2 предохранительного подшипника 14 не соприкасается с роторным валом 1. При отказе магнитного подшипника 6, например, при отсутствии тока, роторный вал 1 падает в предохранительный подшипник 14 и возникает механический контакт между внутренним кольцом 2 и вращающимся при работе машины 12, в частности, быстро вращающимся роторным валом 1, что часто приводит к быстрому износу предохранительного подшипника 14 .
Для управления и регулирования магнитного подшипника 6 машина 12 имеет управляющее устройство 7, которое через электрические провода 8 и электрические провода 9, которые показаны на фиг.1 в виде линий, соединено с магнитным подшипником 6. Управляющее устройство 7 регулирует создаваемое магнитным подшипником 6 магнитное поле так, что роторный вал 1 удерживается магнитным полем в воздушном зазоре 21 во взвешенном состоянии. Для этого управляющее устройство 7 содержит необходимые функции управления и регулирования. Кроме того, управляющее устройство 7 содержит выпрямитель для управления магнитным подшипником 6. Необходимые для измерения расстояния между магнитным подшипником 6 и роторным валом 1 с целью регулирования магнитного поля измерительные устройства и пути обратной связи с управляющим устройством 7 для ясности и как не существенные для понимания изобретения не изображены на фиг.1.
Согласно изобретению машина 12 имеет датчик 5, который измеряет физическую величину G предохранительного подшипника. При этом в рамках примера выполнения измеренная физическая величина G считывается управляющим устройством 7. Физическая величина может быть представлена, например, в виде температуры предохранительного подшипника, или в виде возникающей между наружным кольцом 3 предохранительного подшипника 14 и опорой 4 предохранительного подшипника силы F, или в виде колебаний предохранительного подшипника, или в виде возникающего между наружным кольцом и опорой предохранительного подшипника давления, или в виде расстояния между наружным кольцом и внутренним кольцом. Таким образом, датчик может быть датчиком температуры для измерения температуры предохранительного подшипника, или датчиком силы для измерения возникающей между наружным кольцом и опорой предохранительного подшипника силы F, или датчиком колебаний для измерения колебаний предохранительного подшипника, или датчиком давления для измерения возникающего между наружным кольцом и опорой предохранительного подшипника давления, или датчиком пути для измерения расстояния между наружным кольцом и внутренним кольцом. При этом в рамках показанного на фиг.1 примера выполнения датчик 5 выполнен в виде датчика силы и измеряет возникающую между наружным кольцом 3 и опорой 4 предохранительного подшипника силу F. Датчик 5 расположен между опорой 4 предохранительного подшипника и наружным кольцом 3. Таким образом, датчик 5 расположен в силовом потоке от предохранительного подшипника 14 к опоре 4 предохранительного подшипника.
При этом в рамках показанного на фиг.1 примера выполнения, как показано на фиг.6 и 7, датчик 5 выполнен плоским и заделан в пленку 29 (см. фиг.6) или расположен на пленке (см. фиг.7). Таким образом, датчик 5 образует вместе с пленкой 29 так называемую сенсорную пленку. Датчик 5 измеряет в этом примере выполнения силу F. При этом сенсорная пленка показана на фиг.1 без соблюдения масштаба, а значительно толще, чем в действительности. В этом случае измеренная сила F, как указывалось выше, считывается в рамках примера выполнения управляющим устройством 7. Однако сенсорная пленка при соответствующем выполнении датчика могла бы также измерять, например, температуру, колебания или давление, при этом в одну общую пленку могут быть заделаны или расположены на общей пленке различные датчики для измерения различных физических величин (например, датчик температур и датчик силы).
На фиг.2 показаны в разрезе предохранительный подшипник и опора 4 предохранительного подшипника, при этом на фиг. 2 одинаковые с фиг.1 элементы обозначены теми же позициями. При выполнении изобретения согласно фиг.1 и фиг.2 внутреннее кольцо 2 скользит непосредственно в наружном кольце 3. Таким образом, предохранительный подшипник выполнен в виде подшипника
скольжения.
Показанный на фиг.3 вариант выполнения соответствует по основной конструкции по существу показанному на фиг.1 и 2 варианту выполнения. Поэтому одинаковые элементы обозначены на фиг.3 теми же позициями, что и на фиг.1 и 2. Единственное существенное различие состоит в том, что в варианте выполнения согласно фиг.3 между наружным кольцом 3 и внутренним кольцом 2 расположено тело 27 качения, которые в рамках примера выполнения выполнены в виде шариков. Таким образом, в рамках показанного на фиг.3 варианта выполнения предохранительный подшипник выполнен в виде подшипника качения.
На фиг.4 схематично показан другой вариант выполнения изобретения, который по существу соответствует показанному на фиг.3 варианту выполнения, при этом одинаковые элементы обозначены теми же позициями, что и на фиг.3. Единственное существенное отличие от варианта выполнения согласно фиг.3 состоит в том, что датчик 5 выполнен не в виде сенсорной пленки, а в виде обычного датчика силы. На своей обращенной к опоре 4 предохранительного подшипника стороне наружное кольцо 3 имеет выемку 13, в которой расположена по меньшей мере часть датчика 5. При этом датчик 5 расположен на своей верхней стороне на опоре 4 предохранительного подшипника, а на своей нижней стороне - на наружном кольце 3. Таким образом, датчик 5 расположен между наружным кольцом 3 и опорой 4 предохранительного подшипника и измеряет возникающую между наружным кольцом и опорой 4 предохранительного подшипника силу F. Однако датчик 5 может быть также выполнен, например, в виде датчика температуры для измерения температуры предохранительного подшипника, или в виде датчика колебаний для измерения колебаний предохранительного подшипника, или в виде датчика давления для измерения возникающего между наружным кольцом и опорой предохранительного подшипника давления. При выполнении датчика 5 в виде датчика температуры или в виде датчика колебаний датчик 5 предпочтительно полностью расположен в выемке 13, т.е. он не выступает из выемки 13, как показано на фиг.4. Следует при этом отметить, что, естественно, в этом варианте выполнения датчик также может быть выполнен в виде сенсорной пленки, при этом по меньшей мере часть датчика сенсорной пленки или сенсорная пленка может быть полностью расположена в выемке 13.
На фиг.8 схематично показан другой вариант выполнения, который по существу соответствует варианту выполнения согласно фиг.3, при этом одинаковые элементы обозначены теми же позициями, что и на фиг.3. Единственное существенное различие от показанного на фиг.3 варианта выполнения состоит в том, что датчик 5 выполнен не в виде сенсорной пленки, а в виде обычного датчика пути для измерения расстояния d между наружным кольцом 3 и внутренним кольцом 2. Наружное кольцо 3 имеет в рамках этого примера выполнения на своей внутренней стороне выемку 13' , при этом в рамках примера выполнения часть датчика 5 расположена в выемке 13' и часть датчика 5 расположена внутри наружного кольца 3. Однако датчик 5 может быть также расположен полностью внутри наружного кольца 3. Однако выполненный в рамках этого примера выполнения в виде датчика пути датчик 5 может быть также расположен в другом месте.
На фиг.5 показан в виде схемы способ контролирования состояния предохранительного подшипника. При этом при выполнении способа на первой стадии 15 выключают магнитный подшипник 6, после этого на второй стадии 16 приводят во вращение с заданным ходом движения роторный вал 1, при этом с помощью датчика 5 измеряют физическую величину G предохранительного подшипника 14 и запоминают, после чего на третьей стадии 17 измеренную физическую величину сравнивают с заданной величиной и при необходимости создают на четвертой стадии 18 предупреждающее сообщение, если отклонение измеренной физической величины G от заданной величины превышает предельное значение. Ниже приводится пояснение выполнения способа. На первой стадии 15 выключают магнитный подшипник 6 предпочтительно при остановленном роторном вале 1. Выключение магнитного подшипника 6 осуществляется в рамках примера выполнения с помощью управляющего устройства 7. После этого роторный вал 1 падает в предохранительный подшипник 14 и улавливается им. Затем на стадии 16 приводят во вращение роторный вал 1 с заданным ходом движения. Такой заданный ход движения может состоять, например, в том, что роторный вал 1 медленно вращают с заданной постоянной скоростью вращения в течение определенного промежутка времени в предохранительном подшипнике 14. Для этого роторный вал приводится во вращение, соответственно, с помощью машины 12, управление которой осуществляется с помощью вышестоящего управления 23 (см. фиг.1 и 9) , которое может быть выполнено, например, в виде числового управления машины 12. Для этого вышестоящее управление 23 управляет, как показано схематично на фиг.9, через приводное устройство 30, которое содержит регулировочное устройство и выпрямитель, необходимый для снабжения энергией машины 12, выполненной в рамках примера выполнения в виде электродвигателя машиной 1. Приводное устройство соединено через электрические провода 31, которые показаны схематично в виде линии, с машиной 1. Для регулирования скорости вращения роторного вала 1 в приводное устройство 30 передается от интегрированного в машину 1 измерительного устройства угол W поворота роторного вала 1. При этом скорость вращения, с которой должен вращаться роторный вал 1, задается приводному устройству 30 с помощью вышестоящего управления 23 через линию передачи данных (например, шину передачи данных).
Во время выполнения заданного хода движения на стадии 16 (см. фиг.5) измеряют и запоминают физическую величину, например, температуру предохранительного подшипника или возникающую между наружным кольцом и опорой предохранительного подшипника силу F, или колебания предохранительного подшипника, или возникающее между наружным кольцом и опорой предохранительного подшипника давление, или расстояние между внутренним кольцом и наружным кольцом, при этом запоминание физической величины предпочтительно осуществляется в управляющем устройстве 7.
Затем измеренная физическая величина может считываться, например, оператором машины на месте и оцениваться. Для этого изменение во времени физической величины можно отображать, например, в виде графика на устройстве 24 управления машины. Для этого устройство 24 управления машины соединено через вышестоящее управление 23 с управляющим устройством 7 для передачи данных, что обозначено стрелками 25 и 26. Физическая величина, которая представлена в виде следующих во времени друг за другом измерительных значений, передается с помощью управляющего устройства 7 в устройство 24 управления и оценивается там оператором. Для этого датчик передает, предпочтительно с постоянными интервалами времени, измеренные значения в управляющее устройство 7.
В качестве альтернативного решения или дополнительно к этому в рамках примера выполнения управляющее устройство 7 соединено через интернет 10 и/или, например, через систему шин с расположенным вдали от машины 12 вычислительным устройством 11 для передачи данных, как показано на фиг.1 с помощью стрелок 19 и 20. При этом интернет или шинная система являются примерами для типичной передачи данных. Для этого физическая величина, т.е., точнее говоря, измеренные значения, может передаваться из управляющего устройства 7 в вычислительное устройство 11 и там оцениваться, например, обслуживающим персоналом. В качестве альтернативного решения вместо прямой передачи данных из управляющего устройства 7 через интернет 10 в вычислительное устройство 11 их можно передавать также сначала через соединение 25 из управляющего устройства 7 в вышестоящее управление 23 и оттуда, например, через интернет 10 в вычислительное устройство 11, как показано на фиг.1 с помощью изображенной штриховой линией стрелки.
Однако дополнительно можно также осуществлять автоматическую оценку измеренной физической величины в управляющем устройстве 7, или в вышестоящем управлении 23, или в вычислительном устройстве 11. Для этого на стадии 17 измеренную физическую величину, которая имеется в виде следующих во времени друг за другом измеренных значений, сравнивают с заданной величиной, и если отклонение между измеренной физической величиной и заданной величиной превышает предельное значение, то на стадии 18 создают предупреждающее сообщение. При этом физическая величина, как правило, имеется, как указывалось выше, в виде следующих во времени друг за другом измеренных значений. Заданную величину можно определять, например, посредством вращательного движения нового установленного предохранительного подшипника при выключенном магнитном подшипнике роторного вала 1 с заданным ходом движения и измерения при этом физической величины и запоминания ее в качестве заданной величины. Таким образом, заданная величина представлена, как правило, в виде следующих во времени друг за другом, предпочтительно определяемых с помощью одноразового измерения заданных значений.
Если отклонение измеренной физической величины от заданной величины превышает предельное значение, то на стадии 18 в зависимости от того, где выполняется оценка, с помощью вышестоящего управления 23, или управляющего устройства 7, или вычислительного устройства 11 создается предупреждающее сообщение. Отклонение можно определять, например, посредством определения значения разницы между измеренными значениями и заданными значениями. С помощью предупреждающего сообщения сообщается оператору на месте и/или удаленному от машины обслуживающему персоналу о сильно изношенном предохранительном подшипнике, который должен быть заменен. При этом измеренная физическая величина и заданная величина имеются в распоряжении, как указывалось выше, как правило, в виде изменений во времени. Износ предохранительного подшипника проявляется, например, тем, что во время заданного хода движения температура предохранительного подшипника возрастает быстрее и/или достигаются более высокие значения температуры, чем в неизношенном предохранительном подшипнике. Кроме того, в изношенном подшипнике, как правило, по сравнению с неизношенным предохранительным подшипником при выполнении заданного хода движения измеренная сила и измеренное давление, которое возникает между наружным кольцом предохранительного подшипника и опорой предохранительного подшипника, и/или расстояние между наружным кольцом и внутренним кольцом изменяется, и/или же возникают необычные или сильные колебания предохранительного подшипника. При этом в рамках примера выполнения в качестве физической величины оценивается измеренная датчиком 5 сила F, как указывалось выше, и при необходимости создается предупреждающее сообщение.
Следует еще отметить, что, естественно, для измерения физической величины машина может иметь не только один единственный датчик, но также несколько датчиков, которые измеряют физическую величину, например, в различных местах и/или в различных устройствах (например, в случае силы или колебаний). В этом случае оценку, например, каждого измеренного сигнала датчиков можно выполнять по отдельности.
Кроме того, следует еще отметить, что возникающая между наружным кольцом 3 и опорой предохранительного подшипника сила может действовать не только в радиальном направлении, как показано на фиг.1, но также в тангенциальном направлении, т.е. в направлении движения вращения роторного вала 1. Датчик может быть также выполнен так, что он измеряет силу, действующую в направлении движения вращения роторного вала 1. Внутри управления 7 можно определять также производную от физической величины величину и сравнивать ее затем с заданной величиной, при этом, если отклонение величины, производной от физической величины, от заданной величины превышает предельное значение, создавать предупреждающее сообщение. Производная от физической величины величина может быть представлена, например, в виде крутящего момента, который определяется из действующей в направлении движения вращения роторного вала 1 силы и расстояния датчика до оси R вращения посредством перемножения обеих величин. В этом случае, соответственно, заданная величина представлена в виде крутящего момента. Соответственно, можно выводить также из других физических величин (например, температуры, колебаний) величины и сравнивать для оценки с соответствующей заданной величиной. Кроме того, например, из измеренного расстояния d между наружным кольцом 3 и внутренним кольцом 2 можно выводить силу F.
Кроме того, следует отметить, что, естественно, машина может иметь также несколько датчиков для измерения различных физических величин. Так, например, машина может также одновременно иметь датчик, который измеряет температуру предохранительного подшипника, и/или датчик, который измеряет возникающую между наружным кольцом и опорой предохранительного подшипника силу, и/или датчик, который измеряет возникающее между наружным кольцом и опорой предохранительного подшипника давление, и/или датчик, который измеряет расстояние между внутренним кольцом и наружным кольцом. При этом каждый датчик может быть расположен аналогично датчику 5, например, на обращенной к предохранительному подшипнику стороне наружного кольца и, в частности, по меньшей мере частично или полностью в выемке 13 наружного кольца 3, и/или между наружным кольцом и опорой предохранительного подшипника, и/или по меньшей мере частично внутри наружного кольца 3. При этом физические величины предпочтительно оцениваются параллельно, при этом каждая измеренная физическая величина оценивается, например, как показано на фиг.5 и в соответствующей части описания.
Способ согласно изобретению обеспечивает возможность упреждающего технического обслуживания. Кроме того, с помощью способа, согласно изобретению, обслуживающий персонал может дистанционно контролировать предохранительный подшипник, без необходимости присутствия у машины.
Реферат
Изобретение относится к машине и способу контролирования состояния предохранительного подшипника машины. Способ контролирования состояния предохранительного подшипника (14) машины (12) заключается в том, что предохранительный подшипник (14) улавливает роторный вал (1) машины (12) при выходе из строя магнитного подшипника (6) машины (12). При этом предохранительный подшипник (14) имеет наружное кольцо (3) и расположенное с возможностью вращения относительно наружного кольца (3) внутреннее кольцо (2). Для контроля состояния предохранительного подшипника (14) выключают магнитный подшипник (6) и приводят роторный вал (1) во вращательное движение с заданным ходом движения, причем для этого роторный вал (1) соответственно приводят в движение машиной (12), которая управляется вышестоящим управлением (23), и с помощью датчика (5) измеряют физическую величину (G) предохранительного подшипника (14). Также заявлена соответствующая машина (12) для контролирования состояния предохранительного подшипника (14). Технический результат: обеспечение возможности контролирования состояния установленного в машине (12) предохранительного подшипника (14). 2 н.п. и 20 з.п. ф-лы, 9 ил.
Комментарии