Способ приведения в действие трансмиссии - RU2729010C2
Код документа: RU2729010C2
Чертежи







Описание
Данное изобретение касается трансмиссии, в частности, способа приведения в действие трансмиссии с признаками ограничительной части независимого пункта 1 формулы изобретения.
Общей проблемой рабочих машин, таких как транспортировочные устройства, например, насосы, компрессоры и вентиляторы, или таких как мельницы, дробилки, транспортные средства и т.д., является эффективный рабочий режим с регулируемой скоростью, соответственно, приведение в действие под нагрузкой, соответственно, эксплуатация, например, энергетических установок вплоть до частоты вращения, равной нулю. В дальнейшем электрические машины приводятся в качестве примера приводных машин, соответственно, генераторов, однако, этот принцип действителен для всех возможных видов приводных машин, таких, как например, двигатели внутреннего сгорания.
Наиболее часто применяемые сегодня электрические приводы, соответственно, генераторы являются машинами трехфазного тока, такими, например, как асинхронные машины и синхронные машины, которые по существу эксплуатируются только с постоянной частотой вращения. Кроме того, машина трехфазного тока и следующая за ней электрическая сеть должны рассчитываться соответственно мощными, чтобы они с мертвой точки могли обеспечивать требуемый приводной момент. Электрические машины по этой причине вместо того, чтобы подключаться непосредственно к сети, обычно в комбинации с частотным преобразователем выполняются как привод с регулируемой частотой вращения. Таким образом, режим с регулируемой частотой вращения может быть реализован с нулевой частоты вращения без сильной нагрузки на сеть, однако, это решение является дорогим и связано с существенными потерями в КПД. Более экономичной по сравнению с этим решением, а также лучшей по КПД альтернативой является использование дифференциальных систем, например, согласно AT 507 394 A. Однако основным ограничением при этом является то, что в зависимости от передаточного отношения дифференциальной ступени может быть использован лишь относительно небольшой диапазон частоты вращения, и поэтому в так называемом дифференциальном режиме, т.е. при изменении частоты вращения с помощью дифференциального привода при рабочей частоте вращения приводной машины, практически не могут достигаться низкие частоты вращения на приводном валу рабочей машины.
Для того, чтобы реализовать это, имеются различные возможности. Согласно полезной модели DE 20 2012 101 708 U можно, например, передаточное отношение дифференциальной передачи установить на 1. На этой основе с помощью дифференциального привода можно приводить в действие всю трансмиссию, соответственно, приводить указанную приводную машину с синхронной частотой вращения и в дальнейшем синхронизировать ее с сетью.
Недостаток этого решения заключается в том, что дифференциальный привод и следующий за ним частотный преобразователь имеют существенно меньшие размеры, чем приводная машина, и поэтому могут создавать соответственно лишь небольшой вращающий момент. Этого недостаточно для того, чтобы ускорять приводную машину до синхронной частотой вращения, когда рабочая машина находится в рабочем режиме.
В AT 514 396 A раскрыто решение, посредством которого приводные машины могут ускоряться в диапазоне частот вращения с высоким вращающим моментом, и на следующем этапе рабочая машина может запускаться с нулевой частоты вращения. Это решается за счет того, что приводная машина запускается с частоты вращения, равной нулю или примерной равной нулю, в то время как на приводной вал воздействует внешний, тормозящий вращающий момент, а в фазе ускорения приводного вала тормозится второй привод. Недостаток этого решения заключается в том, что необходимое для этого тормозное устройство является дорогостоящим, а с дифференциальным приводом величиной, например, 20% от суммарной мощности системы может быть реализован лишь непрерывный диапазон частоты вращения примерно от 50% до 100% рабочей частоты вращения.
Поэтому задача данного изобретения состоит в том, чтобы найти решение, с помощью которого можно ускорять приводные машины предпочтительно под нагрузкой, например, чтобы синхронизировать с сетью электрические машины, например, непосредственно подключенные к этой сети, соответственно, чтобы можно было реализовать большой рабочий диапазон частоты вращения.
Эта задача решается с помощью способа с признаками независимого пункта 1 формулы изобретения.
Ядром дифференциальной системы является дифференциальная передача, которая в простом выполнении может представлять собой простую ступень планетарной передачи с тремя приводными, соответственно, выходными частями, причем выходная часть соединена с приводным валом одной рабочей машины, первый привод (приводная часть) соединен с одной приводной машиной, а второй привод (приводная часть) соединен с дифференциальным приводом. Тем самым, рабочая машина может эксплуатироваться при постоянной частоте вращения приводной машины с регулируемой частотой вращения, причем дифференциальный привод обеспечивает варьируемую частоту вращения приводного вала.
Чтобы запускать рабочую машину из состояния покоя в рабочий режим и, если эта приводная машина является электрической машиной, дополнительно приводить приводную машину из состояния покоя предпочтительно на синхронную частоту вращения, рабочий режим системы согласно изобретению может протекать, например, в следующих 3 фазах:
фаза 1: дифференциальный привод в состоянии покоя соединяется как с первым приводом, так и со вторым приводом дифференциальной системы. Затем дифференциальный привод ускоряется, и рабочая машина начинает работать. В зависимости от характеристики вращающего момента рабочей машины и от мощности дифференциального привода, в этом рабочем режиме I предпочтительно реализуется рабочий диапазон частоты вращения примерно до 40%-50% от рабочей - номинальной частоты вращения рабочей машины. Приводная машина в этом рабочем режиме I остается отделенной от сети. Передаточные отношения передаточных ступеней, через которые дифференциальный привод соединен с обоими приводами, предпочтительно выбираются таким образом, что приводная машина по меньшей мере приблизительно достигает своей рабочей частоты вращения, как только дифференциальный привод окажется вблизи своей предельной мощности. Дифференциальный привод в этой фазе работает в режиме двигателя - т.е. он потребляет энергию от сети.
Фаза 2: соединенная с первым приводом дифференциальной системы и теперь работающая в рабочем диапазоне частоты вращения приводная машина соединяются с сетью. Поскольку указанный дифференциальный привод в нижнем рабочем диапазоне частоты вращения этого рабочего режима II работает в режиме генератора - т.е. он поставляет энергию в сеть, то на следующем этапе вращающий момент дифференциального привода регулированием переводится из двигательного режима в генераторный режим. Благодаря этому приводная машина непрерывно нагружается все сильнее до тех пор, пока вся дифференциальная система предпочтительно не перейдет в область нижнего предела рабочего диапазона частоты вращения этого рабочего режима II.
Для того, чтобы поддерживать нагрузки в системе на минимально возможном уровне, предпочтительно указанный переход из двигательного режима в генераторный режим дифференциального привода производится с демпфированием, т.е. не резко.
Фаза 3: как только на дифференциальном приводе и на приводной машине в отношении частоты вращения и вращающего момента рабочая точка устанавливается в нижнем рабочем диапазоне частоты вращения рабочего режима II, этот дифференциальный привод отделяется от первого привода дифференциальной системы. Система теперь работает в дифференциальном режиме, благодаря чему в этой третьей фазе для рабочей машины может быть реализован максимальный вращающий момент при максимальной частоте вращения привода.
Предпочтительные варианты выполнения данного изобретения составляют предмет зависимых пунктов формулы изобретения.
В дальнейшем предпочтительные варианты выполнения изобретения будут разъяснены со ссылкой на прилагаемые чертежи. На них показано следующее.
Фиг.1 - принципиальная схема дифференциальной системы для привода насоса согласно уровню техники,
Фиг.2 - предлагаемый изобретением вариант выполнения дифференциальной системы для быстродействующих приводов,
Фиг.2a - диаграмма с типичной кривой вращающего момента насоса,
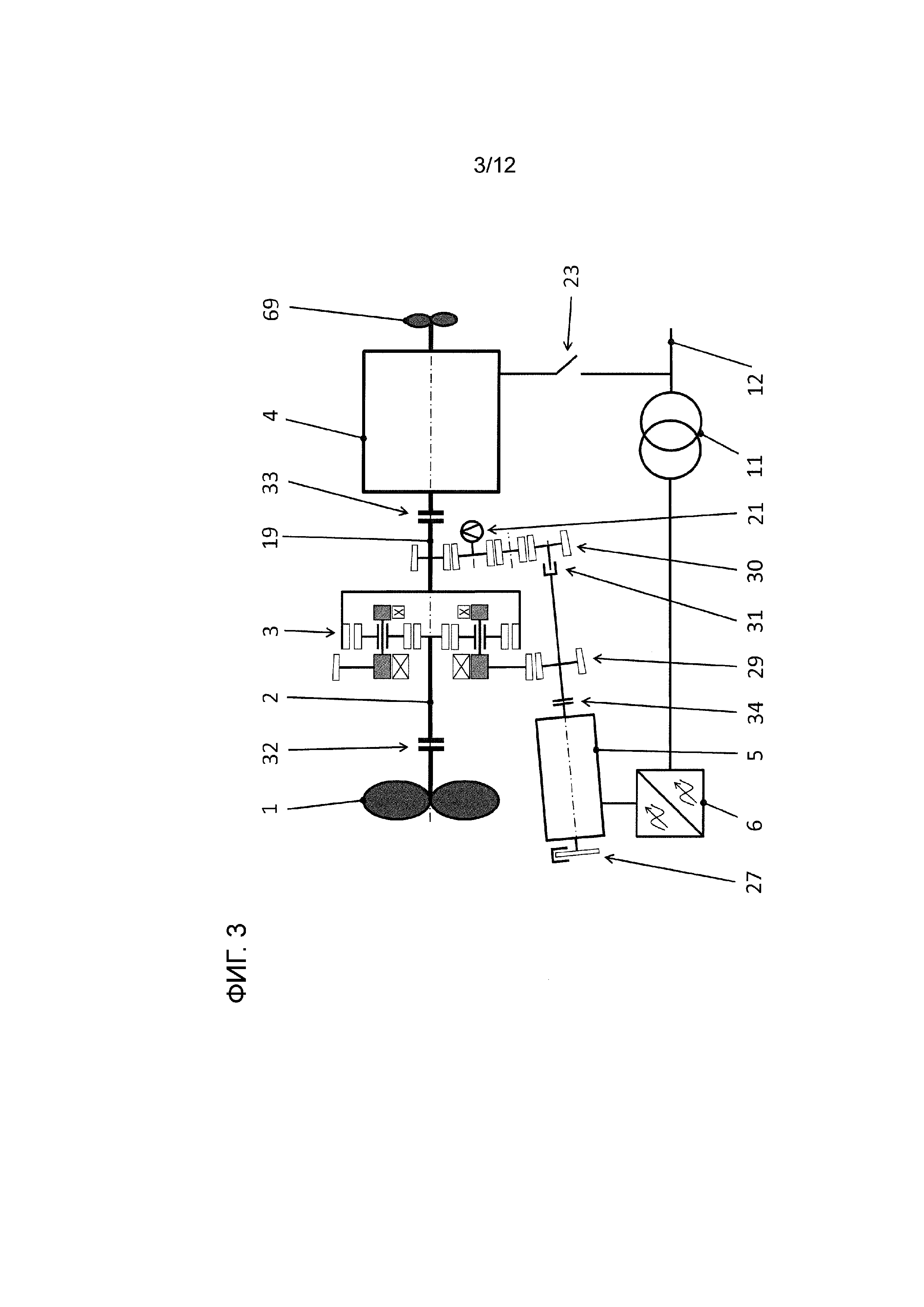
Фиг.3 - другой предлагаемый изобретением вариант выполнения дифференциальной системы для быстродействующих приводов,
Фиг.4 - временная зависимость параметров частоты вращения- и мощности дифференциальной системы во время разгона,
Фиг.5 - предлагаемый изобретением вариант выполнения дифференциальной системы для приводов медленного действия,
Фиг.6 - еще один предлагаемый изобретением вариант выполнения, в котором дифференциальный привод может соединяться со вторым приводом и выходной частью дифференциальной системы,
Фиг.7 - другой предлагаемый изобретением вариант выполнения, в котором дифференциальный привод 5 дифференциальной системы может соединяться со вторым приводом и выходной частью,
Фиг.8 - еще один предлагаемый изобретением вариант выполнения, в котором дифференциальный привод 5 дифференциальной системы соединен со вторым приводом и может соединяться с выходной частью,
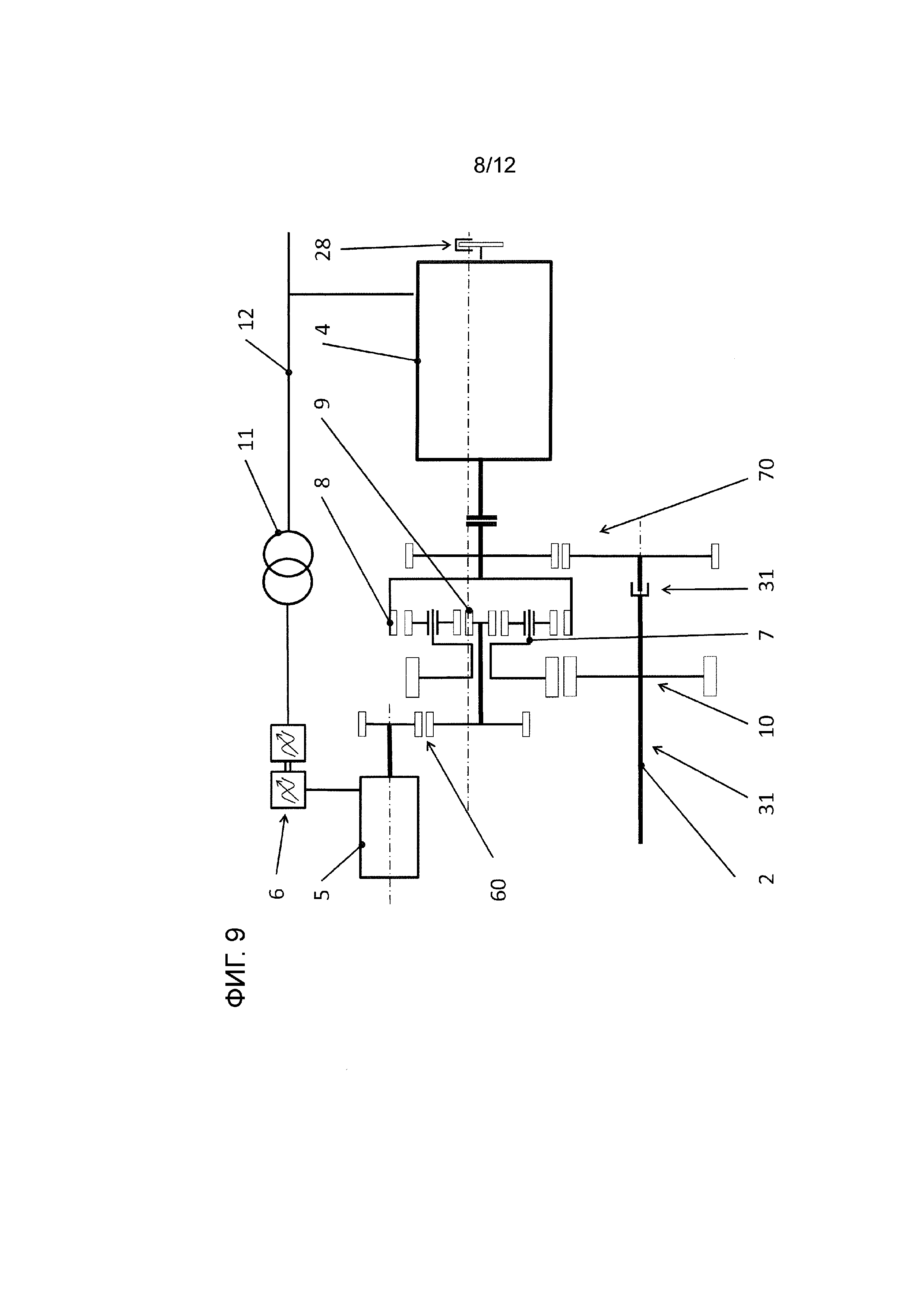
Фиг.9 - другой предлагаемый изобретением вариант выполнения, в котором выходная часть может соединяться с первым приводом дифференциальной системы,
Фиг.10 - следующий предлагаемый изобретением вариант выполнения, в котором дифференциальный привод через второй привод может соединяться с первым приводом дифференциальной системы,
Фиг.11 - предлагаемый изобретением вариант выполнения дифференциальной системы с положительной зубчатой передачей,
Фиг.12 - другой предлагаемый изобретением вариант выполнения дифференциальной системы с положительной зубчатой передачей, и
Фиг.13 - еще один предлагаемый изобретением вариант выполнения дифференциальной системы для энергетической установки.
На Фиг.1 показана принципиальная схема дифференциальной системы для трансмиссии на примере насоса. При этом рабочая машина 1 представляет собой символически показанный ротор насоса, который через приводной вал 2 и дифференциальную передачу 7-9 приводится в действие приводной машиной 4. Приводная машина 4 предпочтительно представляет собой машину трехфазного тока среднего напряжения, подключенную к сети 12, которая в показанном примере на базе машины трехфазного тока среднего напряжения является сетью среднего напряжения. Выбранный уровень напряжения зависит от случая применения и прежде всего от уровня мощности приводной машины 4, и, не оказывая влияния на основные функции предлагаемой изобретением системы, может иметь любой желаемый уровень. Соответственно числу пар полюсов приводной машины 4 получается характерный для конструкции рабочий диапазон частоты вращения. Этот рабочий диапазон частоты вращения при этом является диапазоном частоты вращения, в котором приводная машина 4 может вырабатывать определенный, соответственно, желаемый или требуемый вращающий момент, и в котором приводная машина 4 в случае электрической приводной машины синхронизируется с сетью 12, а, соответственно, в случае двигателя внутреннего сгорания может запускаться или, соответственно, эксплуатироваться. Водило 7 планетарной передачи дифференциальной передачи соединено с приводным валом 2, приводная машина 4 - с коронным колесом 8, а солнечное колесо 9 дифференциальной передачи - с дифференциальным приводом 5. Дифференциальный привод 5 предпочтительно является машиной трехфазного тока и, в частности, асинхронной машиной или синхронной машиной с возбуждением от постоянных магнитов.
Вместо дифференциального привода 5 может использоваться также гидростатическая регулируемая передача. При этом дифференциальный привод 5 заменяется комбинацией гидростатический насос/двигатель, которые соединены с напорным трубопроводом и могут переставляться предпочтительно в объеме протекающей среды. Тем самым, как и в случае регулируемой частоты вращения электрического дифференциального привода 5, частота вращения является регулируемой.
Ядром дифференциальной системы в этом варианте выполнения является, таким образом, простая ступень планетарной передачи с тремя приводными, соответственно, выходными частями, причем выходная часть соединена с приводным валом 2 рабочей машины 1, первая приводная часть (привод) соединена с приводной машиной 4, а вторая приводная часть (привод) соединена с дифференциальным приводом 5.
Для того, чтобы можно было оптимально согласовать диапазон частоты вращения системы, между водилом 7 планетарной передачи и рабочей машиной 1 внедряется согласующий механизм 10. В порядке альтернативы показанной ступени зубчатого цилиндрического прямозубого колеса этот согласующий механизм 10 может быть, например, и многоступенчатым, соответственно, может быть выполнен как зубчатый ремень или цепная передача, и/или может комбинироваться со ступенью планетарной передачи или ступенью конического колеса. С помощью согласующего механизма 10 можно, кроме того, реализовать осевое смещение для указанной рабочей машины 1, которое делает возможным коаксиальное размещение дифференциального привода 5 и приводной машины 4. Дифференциальный привод 5 предпочтительно с помощью преобразователя 6 энергии низкого напряжения и - если это необходимо - с помощью трансформатора 11 электрически подключен к сети 12. Существенное преимущество этой концепции заключается в том, что приводная машина 4 может подсоединяться к сети 12 непосредственно, т.е. без использования дорогостоящей силовой электроники. Уравновешивание между изменяемой частотой вращения ротора и фиксированной частотой вращения подключенной к сети приводной машины 4 реализуется посредством дифференциального привода 5 с регулируемой частотой вращения.
Уравнение для вращающего момента дифференциальной системы выглядит следующим образом:
вращающий моментДифференциального привода=вращающий моментПриводного вала*y/x.
Масштабный коэффициент y/x является мерилом для передаточных отношений в дифференциальной передаче 3 и в согласующем механизме 10. Вращающий момент на выходных и приводных частях пропорциональны друг другу, благодаря чему дифференциальный привод 5 может регулировать вращающий момент во всей трансмиссии. Мощность дифференциального привода 5 по существу пропорциональна произведению процентного отклонения частоты вращения рабочей машины 1 от его основного числа оборотов и мощности приводного вала. Основное число оборотов является при этом той частотой вращения, которая устанавливается в рабочей машине 1, когда дифференциальный привод 5 имеет частоту вращения, равную нулю. В соответствии с этим большой рабочий диапазон частоты вращения рабочей машины 1 требует соответственно большого размера дифференциального привода 5. Если, например, дифференциальный привод 5 имеет номинальную мощность округленно 20% от общей мощности системы (номинальная мощность рабочей машины), то при использовании типичной так называемой области ослабления поля дифференциального привода 5 это означает, что в рабочей машине 1 могут быть реализованы минимальные рабочие частоты вращения около 50% от рабочей - номинальной частоты вращения. В этом можно увидеть также причину того, почему дифференциальные системы согласно уровню техники особенно пригодны для малых рабочих диапазонов частоты вращения, причем в принципе может быть реализован любой рабочий диапазон частоты вращения. Однако можно установить, что многополюсные машины трехфазного тока соответственно стандарту допускают большее превышение числа оборотов по отношению к синхронной частоте вращения, что в принципе (при одинаковой номинальной мощности дифференциального привода 5) допускает больший рабочий диапазон частоты вращения рабочей машины 1, поскольку возможна бóльшая область ослабления поля дифференциального привода 5.
Для того чтобы можно было дифференциальную систему разогнать с частоты вращения, равной нулю, дифференциальный привод 5 с помощью муфты 25 разъемно соединяется с солнечным колесом 9. Синхронизирующий тормоз 24 воздействует на второй привод дифференциальной системы и, тем самым, на солнечное колесо 9, а тем самым и на всю трансмиссию. При разгоне в этом варианте выполнения дифференциальной системы на первом этапе дифференциальный привод 5 посредством муфты 25 отсоединяется от остальной дифференциальной системы. Если же теперь приводная машина 4 разгоняется и соединяется с сетью 12, то солнечное колесо 9 свободно вовлекается во вращение, и во всей трансмиссии в целом не может быть создано никакого заметного вращающего момента. Таким образом, и в этом случае рабочая машина 1 остается в области низкой частоты вращения, и приводная машина 4 может соединяться с сетью 12 без заметного внешнего противодействующего момента.
Как только эта приводная машина 4 ускоряется выше определенной частоты вращения, а рабочая машина 1 по существу останавливается, на солнечном колесе 9 устанавливается соответствующая передаточному отношению дифференциальной передачи высокая частота вращения, которая большей частью лежит выше разрешенного диапазона регулирования частоты вращения дифференциального привода 5. Диапазон регулирования частоты вращения является тем диапазоном частоты вращения, в котором работает дифференциальный привод 5, чтобы можно было реализовать рабочий диапазон частоты вращения рабочей машины 1. Диапазон регулирования частоты вращения при этом определяется прежде всего установленными производителем пределами напряжения, тока и частоты вращения.
Дифференциальный привод 5 в этом примере выполнения в этой фазе не может соединяться с солнечным колесом 9. На следующем этапе поэтому с помощью синхронизирующего тормоза 24 соединенный с солнечным колесом 9 второй привод дифференциальной системы замедляется до частоты вращения, которая лежит в диапазоне регулирования частоты вращения дифференциального привода 5. Это может происходить как регулируемо по частоте вращения/вращаемому моменту, так и не регулируемо, в зависимости от реализованной тормозной системы 24, соответственно, от требований к трансмиссии. В дальнейшем находящаяся со стороны дифференциальной передачи часть муфты 25 предпочтительно посредством дифференциального привода 5 синхронизируется с частотой вращения второго привода дифференциальной системы, а затем муфта 25 замыкается.
За счет срабатывания синхронизирующего тормоза 24 (на Фиг.1 символически представленного как гидродинамический тормоз) и тем самым замедления второго привода дифференциальной системы приводной вал 2 принудительно ускоряется, причем имеющийся в распоряжении вращающий момент определяется минимальным действующим на приводной вал 2 тормозным усилием синхронизирующего тормоза 24, с одной стороны, и опрокидывающим моментом приводной машины 4, с другой стороны.
На Фиг.2 показан предлагаемый изобретением вариант выполнения дифференциальной системы, которая делает возможным сверхсинхронный рабочий диапазон частоты вращения без согласующего механизма. Этот вариант выполнения предпочтительно находит применение в быстродействующих рабочих машинах. Представленная трансмиссия здесь, как и на Фиг.1, тоже содержит рабочую машину 1, приводной вал 2, приводную машину 4 и дифференциальный привод 5, которые соединены с выходными, соответственно, приводными частями дифференциальной передачи 3. Дифференциальный привод 5 с помощью преобразователя 6 (состоящего предпочтительно из находящегося со стороны двигателя выпрямителя, соответственно, находящегося со стороны сети инвертора - здесь упрощенно представлен в виде блока) и трансформатора 11 подключен к сети 12. Приводная машина 4 с помощью переключателя 23 может соединяться с сетью 12.
Так как в рассмотренном примере рабочая машина 1 эксплуатируется с частотой вращения, которая явно выше синхронной частоты вращения приводной машины 4, то приводной вал 2 соединен с солнечным колесом 13, а приводная машина 4 посредством соединительного вала 19 соединена с коронным колесом 14. Дифференциальный привод 5 может соединяться водилом 16 планетарной передачи с двумя или более планетарными шестернями 15. Таким образом, можно простым образом с одной ступенью планетарной передачи и без согласующего механизма обеспечить передачу между приводной машиной 4 и рабочей машиной 1 с коэффициентом, например, 2,5-6,5. С помощью, например, одной ступени планетарной передачи могут быть, кроме того, достигнуты существенно более высокие значения передаточных отношений. Ступень планетарной передачи характеризуется тем, что каждая из планетарных шестерен 15 имеет по два зубчатых колеса, которые соединены друг с другом без возможности проворачивания и имеют разные диаметры начальной окружности, причем одно зубчатое колесо взаимодействует с солнечным колесом, а второе зубчатое колесо взаимодействует с коронным колесом.
В качестве рабочей машины 1 на Фиг.1 - Фиг.3, Фиг.5 и Фиг.9 - Фиг.12 символически в качестве примера представлен насос. Описанные в связи с этой и с последующими фигурами принципы применимы, однако, и для приводов рабочих машин, как например, компрессоров, вентиляторов и ленточных транспортеров, мельниц, дробилок и т.д., или энергетических установок и подобных устройств.
Насос как лопастная гидравлическая машина имеет квадратичную кривую изменения вращающего момента, на которую при приведении в действие накладываются характерные для конструкции начальные вращающие моменты трогания от опорных систем элементов трансмиссии и т.п. Это приводит к тому, что при трогании сначала необходимо преодолеть вращающий момент величиной, например, 10%-20% от номинального вращающего момента рабочей машины 1. По мере возрастания частоты вращения падает требуемый вращающий момент привода (вследствие отпадения начального вращающего момента трогания) и устанавливается возрастающий соответственно рабочей частоте вращения рабочей машины 1 (примерно квадратично) вращающий момент, который при номинальной частоте вращения достигает номинального вращающего момента. Описанный характер изменения вращающего момента в качестве примера представлен на диаграмме на Фиг.2a.
С помощью определяемой приводной машиной 4 частоты вращения кронным колеса 14 и обусловленной рабочим режимом требуемой частоты вращения солнечного колеса 13 неизбежно получаются устанавливаемая частота вращения, соответственно, устанавливаемый вращающий момент на водиле 16 планетарной передачи, которые должны регулироваться дифференциальным приводом 5.
Водило 16 планетарной передачи может быть выполнено, например, цельно или составным из нескольких компонентов, соединенных друг с другом без возможности проворачивания. Поскольку вращающий момент на водиле 16 планетарной передачи высок, то преимущество даст, например, установка передаточной ступени 17, 18 между водилом 16 планетарной передачи и дифференциальным приводом 5. Для этого предлагается, например, ступень зубчатого цилиндрического прямозубого колеса, причем зубчатое колесо 17 без возможности проворачивания соединено с водилом 16 планетарной передачи, а зубчатое колесо 18 соединено с дифференциальным приводом 5. В порядке альтернативы эта передаточная ступень может быть выполнена, например, и многоступенчатой, соответственно, в виде зубчатого ремня, цепной передачи, планетарной ступени или в виде угловой ременной передачи. Вместо передаточной ступени 17, 18 при необходимости может быть установлен передаточный механизм, регулируемый ступенчато или бесступенчато.
На Фиг.2 показан дифференциальный привод 5 с преобразователем 6. Точно так же несколько дифференциальных приводов могут приводить в действие водило 16 планетарной передачи, для чего передаваемый вращающий момент передаточной ступени 17, 18 распределяется между этими дифференциальными приводами. Дифференциальные приводы (приводные части) могут быть при этом равномерно или также асимметрично распределены по периметру зубчатого колеса 17. Предпочтительно - однако, не обязательно - дифференциальные приводы при этом управляются общим преобразователем 6, причем в таком случае предпочтительно один дифференциальный привод работает как так называемый «ведущий» (Master), а другой/другие дифференциальный привод/приводы - как так называемый «ведомый» (Slave). Дифференциальные приводы могут также управляться несколькими выпрямителями, соответственно, инверторами со стороны двигателя по отдельности или группами, причем эти соединенные с дифференциальными приводами так называемые выпрямители, соответственно, инверторы предпочтительно со стороны двигателя имеют также общие, соединенные через промежуточное звено постоянного тока, подключенные к сети 12 через трансформатор 11 так называемые выпрямители, соответственно, инверторы со стороны сети.
Если указанная система оборудована несколькими дифференциальными приводами, то предпочтительно только один дифференциальный привод 5 через вспомогательный привод соединен с приводной машиной 4 - как показано на Фиг.2. В этом случае по меньшей мере один второй дифференциальный привод через водило 16 планетарной передачи и передаточную ступень 17, 18 приводит в действие вспомогательный привод 20 в дополнение к первому дифференциальному приводу 5. Таким образом, необходим только один вспомогательный привод 20.
С соединительным валом 19 и в дальнейшем с приводной машиной 4, соответственно, с первым приводом дифференциальной системы соединен вспомогательный привод 20. Этот вспомогательный привод 20 посредством муфты 22 может соединяться с дифференциальным приводом 5 и предпочтительно приводит в действие также масляный насос 21. Муфта 22 может быть позиционирована в принципе везде между дифференциальным приводом 5 и первым приводом дифференциальной системы - т.е. также и в другой ступени, нежели чем ближайшая к дифференциальному приводу 5 ступень, вспомогательного привода 20. Муфта 22 предпочтительно выполнена как кулачковая муфта, зубчатая муфта, фрикционная муфта или как муфта свободного хода. Муфта свободного хода (называемая также обгонной муфтой) при этом является муфтой, действующей только в одном направлении вращения. Она может быть выполнена также в форме самосинхронизирующейся сцепной муфты. Муфта свободного хода является тем механизмом, когда передача вращающего момента происходит через зубчатое сцепление. Приводная машина 4 может быть также соединена и с промежуточной ступенью механизма передачи вспомогательного привода 20, причем соединение вспомогательного привода 20 с первым приводом сохраняется.
Дифференциальный привод 5 в показанном варианте выполнения может быть через муфту 25 разъемно соединен с передаточной ступенью 17, 18. Для того, чтобы запустить указанную систему, дифференциальный привод 5 путем замыкания муфты 25 соединяется с передаточной ступенью 17, 18 и путем замыкания муфты 22 соединяется с вспомогательным приводом 20. Поскольку затем дифференциальный привод 5 разгоняется, то тем самым одновременно ускоряются рабочая машина 1 и приводная машина 4. В случае выполнения муфты 22 в виде муфты свободного хода она автоматически передает вращательное движение дифференциального привода 5 на вспомогательный привод 20, соответственно, на приводную машину 4.
Если приводная машина 4 выполнена как асинхронная машина, то она предпочтительно устанавливается на рабочую частоту вращения, затем замыкается переключатель 23, и приводная машина 4 соединяется с сетью 12. Во время соединения с сетью 12 она лишь кратковременно потребляет ток возбуждения. Этот ток хотя и больше, чем номинальный ток приводной машины 4, однако он длится лишь несколько периодов сети переменного тока и имеет значительно меньшую величину, чем устанавливающийся ток, который потребляла бы эта приводная машина 4, если бы она подключалась к сети под нагрузкой. Этот ток возбуждения в случае необходимости может быть дополнительно снижен путем применения различных признанных технических методов. Затем муфта 22 открывается, и дифференциальная система работает в так называемом дифференциальном режиме. Если муфта 22 выполнена как муфта свободного хода, то это соединение автоматически разъединяется, как только частота вращения приводящей части (дифференциального привода 5) становится меньше, чем частота вращения приводимой части (на Фиг.2 это вспомогательный привод 20) (ср. в связи с этим также Фиг.4). Если приводная машина 4 выполнена как синхронная машина, то она согласно признанным правилам техники может синхронизироваться с сетью и тем самым плавно подключаться к сети. Дифференциальный привод 5 при этом помогает синхронизировать приводную машину 4 с сетью, поскольку он может регулировать частоту вращения и предпочтительно также фазовый угол приводной машины 4 и синхронизировать с сетью 12.
Если приводная машина 4 представляет собой двигатель внутреннего сгорания, то она может запускаться при поддержке дифференциального привода 5.
В случае нарушения режима работы (например, сбоя в работе сети) в худшем случае как приводная машина 4, так и рабочая машина 1 неконтролируемо работают в режиме холостого хода. Для того, чтобы в таком случае защитить работающий в дифференциальном режиме дифференциальный привод 5 от превышенной частоты вращения, можно использовать или тормоз 26, который воздействует на второй привод дифференциальной системы, и/или тормоз 27, воздействующий прямо на дифференциальный привод 5. В качестве альтернативного решения предлагается открыть муфту 25 и вследствие этого отсоединить дифференциальный привод 5 от остальной дифференциальной системы.
Если муфта 22 выполнена как муфта свободного хода, то ее соединение активируется автоматически, как только частота вращения приводящей части (вспомогательного привода 20) станет меньше, чем частота вращения приводимой части (дифференциального привода 5), вследствие чего автоматически предотвращается превышенная частота вращения дифференциального привода 5.
Таким образом, при использовании муфты свободного хода в качестве муфты 22 для режимов «разгон» и «дифференциальный режим», соответственно, «нарушение режима работы» не требуются ни муфта 25, ни тормоза 26, соответственно, 27.
Если муфта 22 выполнена как фрикционная муфта, то в случае нарушения режима работы она активируется предпочтительно тогда, когда разность частот вращения между приводимым валом вспомогательного привода 20 и дифференциальным приводом 5 является минимальной (в идеале при разности частот вращения, приблизительно равной нулю).
В еще одном варианте выполнения изобретения можно также использовать тормоз 26 для того, чтобы затормаживать второй привод дифференциальной системы во время описанного процесса запуска, чтобы избежать одновременного разгона водила планетарной передачи 16. При этом муфта 22 остается замкнутой, а муфта 25 открытой. Таким образом можно рабочую машина 1 разогнать с рабочей частоты вращения, равной нулю. Максимально достигаемая приводная мощность для рабочей машины 1, однако, ограничена в соответствии с эффективной мощностью дифференциального привода 5. Однако, поскольку эксплуатация, например, насоса питательной воды для котла включает в себя также режимы с малой частотой вращения (меньшей, чем достижимая рабочая частота вращения в дифференциальном режиме) и меньшей мощностью, соответственно, также обусловленный обслуживанием ввод в эксплуатацию, то эти режимы могут быть реализованы посредством данного варианта выполнения.
Подобный результат может быть достигнут за счет того, что тормозом притормаживают первый привод (в случае Фиг.2, например, тормозом 28 на приводной машине 4). Муфта 25 в этом примере замкнута, а муфта 22 открыта. Тем самым можно при остановленном коронном колесе 14 с помощью дифференциального привода 5 приводить в действие водило 16 планетарной передачи и в дальнейшем рабочую машину 1. Еще один случай применения такого тормоза 28 в случае нарушения режима работы состоит в том, что приводная машина 4 замедляется параллельно рабочей машине 1, чтобы тем самым предотвратить превышенную частоту вращения на дифференциальном приводе 5.
Как показано на Фиг.1 и Фиг.2, в одной дифференциальной системе первый и второй приводы и выходная часть могут соединяться альтернативно с коронным колесом или с водилом планетарной передачи, или солнечным колесом. В другом предлагаемом изобретением варианте дифференциальный привод 5 соединяется с коронным колесом 14, приводная машина 4 соединяется с водилом 16 планетарной передачи, а рабочая машина 1 соединяется с солнечным колесом 13. Еще одна альтернатива объединяет в себе комбинации этих вариантов выполнения изобретения.
Представленная на Фиг.2 конфигурация отражает вариант выполнения, в котором можно просто и экономично реализовать высокие частоты вращения в рабочей машине 1. Пример конфигурации, при которой рабочая машина 1 соединена с коронным колесом 14, приводная машина 4 соединена с солнечным колесом 13, а дифференциальный привод 5 соединен с водилом 16 планетарной передачи, является возможным вариантом выполнения для передаточных чисел понижающей передачи.
На Фиг.3 показан еще один предлагаемый изобретением вариант выполнения дифференциальной системы для быстродействующих приводов. Эта дифференциальная система в принципе построена так же, как и описанная в связи с Фиг.2. В противоположность показанному на Фиг.2 передаточная ступень 29 представлена как коническая передаточная ступень. Таким образом, ось вращения дифференциального привода 5 расположена с угловым смещением относительно оси вращения приводной машины 4 и рабочей машины 1. За счет этого получается, что и вспомогательный привод 30 должен быть выполнен как угловая ременная передача. С помощью такого углового смещения увеличивается осевое расстояние между дифференциальным приводом 5 и рабочей машиной 1, а за счет этого рабочая машина 1 может ближе придвигаться к дифференциальной системе. Точно так же можно расположить дифференциальный привод 5 зеркально в направлении приводной машины 4 (ср. Фиг.2 и Фиг.5), а тем самым и приводная машина 4 может придвигаться ближе к дифференциальной системе.
Вспомогательный привод 30, как и вспомогательный привод 20, предпочтительно следует рассчитать таким образом, что (a) направления вращения рабочей машины 1 и приводной машины 4 противоположны друг другу, и (b) приводная машина 4 предпочтительно достигнет своей рабочей частоты вращения, как только дифференциальный привод 5 войдет в область своей предельной мощности.
Вспомогательный привод 30 посредством муфты 31 может соединяться с дифференциальным приводом 5, а также предпочтительно приводить в действие масляный насос 21. Муфта 31 может быть позиционирована любым образом на пути между дифференциальным приводом 5 и соединительным валом 19, однако, предпочтительно располагается между масляным насосом 21 и дифференциальным приводом 5, чтобы обеспечить работу смазочной системы в аварийном режиме. Если дифференциальный привод 5 расположен зеркально в направлении приводной машины 4, то первое зубчатое колесо вспомогательного привода 30, например, вращается с возможностью сцепления с соединительным валом между дифференциальным приводом 5 и вторым приводом дифференциальной системы (ср. Фиг.2 и Фиг.5).
Для выполнения и функционирования муфты 31 в принципе справедливо то же, что и для муфты 22. Муфты 22, 31 могут, кроме того, быть выполнены как гидродинамические муфты/преобразователи вращающего момента с дополнительной/интегрированной арретирующей функцией и, тем самым, использоваться как аварийная тормозная система, поскольку она замыкается, как только в дифференциальном режиме в трансмиссии возникает нарушение режима работы, и дифференциальный привод 5 нужно защитить от превышенной частоты вращения (ср. соответствующие пояснения к Фиг.2). В порядке альтернативы (или дополнительно) может использоваться, например, тормоз 27, который воздействует непосредственно на дифференциальный привод 5. В принципе, однако, согласно изобретению может использоваться любой вид муфт.
Представленная на Фиг.3 муфта 34 служит в первую очередь, как и муфты 32 и 33, для соединения рабочей машины 1, приводной машины 4 и дифференциального привода 5 с передаточной частью дифференциальной системы. Если предпочтительно использование простой и экономичной муфты 31, то муфта 34, как уже описывалось в связи с Фиг.2, может быть выполнена разъемной в рабочем режиме (возможно и с автоматическим открытием при превышенной частоте вращения), чтобы дифференциальный привод 5 в случае, например, нарушения режима работы отделить от второго привода дифференциальной системы. Таким образом, в принципе тормоз 27 тоже больше не нужен. В порядке альтернативы, как уже пояснялось, можно вместо муфты 31 использовать муфту свободного хода, которая при нарушении режима работы предотвращает развитие превышенной частоты вращения на дифференциальном приводе 5. Это возможно благодаря тому, что в случае неисправности в дифференциальном режиме (рабочий режим II) частоты вращения рабочей машины 1 и приводной машины 4 всегда идут в направлении «самой низкой рабочей частоты вращения», и тем самым соответственно определено требуемое направление свободного хода.
Приведение в действие и рабочий режим дифференциальной системы вплоть до ее номинальной рабочей точки происходят в три фазы, как это пояснялось со ссылкой на Фиг.3. Этими тремя фазами являются:
Фаза 1: дифференциальный привод 5 соединен со вторым приводом дифференциальной системы и дополнительно путем замыкания муфты 31 посредством вспомогательного привода 30 дополнительно соединяется с первым приводом (включая соединительный вал 19 и приводную машину 4) дифференциальной системы (в случае муфты свободного хода она активируется автоматически). Затем дифференциальный привод 5 ускоряется, и рабочая машина 1 начинает работать. В зависимости от характеристики вращающего момента рабочей машины 1 (включая возможно соединенный с трансмиссией так называемый бустерный насос 69) и от мощности дифференциального привода 5 в этом рабочем режиме I предпочтительно может быть реализована бесступенчато регулируемая рабочая частота вращения от нуля до, например, примерно 40%-50% от рабочей - номинальной частоты вращения рабочей машины 1. Под трансмиссией при этом понимают всю силовую передачу между приводным валом 2 и приводной машиной 4. Приводная машина 4 в этом рабочем режиме I остается отделенной от сети.
Передаточные отношения действующих в этом случае передач 3, 29 и 30 выбираются таким образом, что приводная машина 4 достигает своей рабочей частоты вращения, как только дифференциальный привод 5 попадает в область своей предельной мощности. Т.е. дифференциальный привод 5 выполняется таким образом, что он (a) может преодолеть собственные начальные вращающие моменты трансмиссии, и (b) в рабочем режиме I достигает рабочей частоты вращения, которая лежит в области минимально возможной, достижимой в дифференциальном режиме (рабочий режим II) рабочей частоты вращения. Предпочтительно среди прочего в пользу создания регулируемого гистерезиса для переключения между рабочими режимами I и II допускают более или менее значительное перекрытие рабочих диапазонов частоты вращения в режимах I и II.
Если дифференциальный привод 5 выполнен согласованно по мощности настолько маленьким, насколько возможно, то можно также предусмотреть отличие в рабочей частоте вращения между рабочими режимами I и II. При этом, однако, при переключении между рабочими режимами I и II следует учитывать скачки вращающего момента и частоты вращения, которые могут компенсироваться предпочтительно методами управления или также демпферами и/или муфтами, и/или гидродинамическими преобразователями вращающего момента с дополнительной/интегрированной арретирующей функцией, например, как муфта 31. Если имеются разрывы в значениях рабочей частоты вращения между рабочим режимом I и рабочим режимом II, то дифференциальный привод 5, как описано выше, может не ускорять приводную машину 4 до ее рабочей частоты вращения. Приводная машина 4 в таком случае подключается к сети 12 с частотой вращения, меньшей, чем ее синхронная частота вращения, что приводит к соответствующим ударам тока и вращающего момента. Однако, они меньше, чем если бы приводная машина 4 подключалась к сети 12 с частотой вращения, равной нулю. Дифференциальный привод 5 при этом во время подключения приводной машины к сети 12 отделяется от вспомогательного привода (в случае муфты свободного хода она деактивируется автоматически) и «генерирует» обратный момент на втором приводе дифференциальной системы.
Дифференциальный привод 5 в любом случае работает в этой первой фазе (рабочий режим I) в режиме двигателя - т.е. он потребляет энергию из сети.
Фаза 2: как только приводная машина 4 достигает своей рабочей частоты вращения, она, как уже описано в связи с Фиг.2, синхронизируется с сетью 12, и переключатель 23 замыкается.
Поскольку дифференциальный привод 5 в нижнем рабочем диапазоне частоты вращения рабочего режима II работает в генераторном режиме - т.е. он подает энергию в сеть, то на следующем этапе вращающий момент дифференциального привода 5 регулируется от требуемого для рабочего режима I в двигательном режиме до требуемого сначала для рабочего режима II в генераторном режиме. Благодаря этому приводная машина 4 непрерывно нагружается все сильнее, пока дифференциальная система предпочтительно не окажется в нижней области рабочего диапазона частоты вращения рабочего режима II.
Для того, чтобы нагрузки в системе удерживать как можно меньшими, переход дифференциального привода из двигательного режима в генераторный режим производится предпочтительно с демпфированием, т.е. не резко.
Фаза 3: как только дифференциальная система достигнет описанную в связи с фазой 2 точку режима в нижнем рабочем диапазоне частоты вращения рабочего режима II, дифференциальный привод 5 отсоединяется от первого привода дифференциальной системы за счет того, что или открывается муфта 31, или - в случае муфты свободного хода - соединение разъединяется автоматически (деактивируется), как только частота вращения дифференциального привода становится меньше. Система работает теперь в рабочем режиме II (= в дифференциальном режиме), вследствие чего в этой третьей фазе для рабочей машины 1 может быть реализован максимальный вращающий момент при максимальной частоте вращения привода.
Для того, чтобы переключить дифференциальную систему с рабочего режима II на рабочий режим I - например, чтобы отключить рабочую машину 1, или для меньшей подачи -, предпочтительно рекомендуется следующая последовательность операций.
Сначала регулированием устанавливается нижняя область рабочего диапазона частоты вращения рабочего режима II. После предпочтительной синхронизации обеих половин муфты (путем регулирования частоты вращения дифференциального привода 5), муфта 31 замыкается (если она не выполнена как муфта свободного хода). В качестве следующего этапа вращающий момент дифференциального привода 5 регулированием переводится с необходимого для рабочего режима II генераторного режима в требуемый для рабочего режима I двигательный режим. Благодаря этому приводная машина 4 непрерывно разгружается до тех пор, пока она не перестанет создавать вращающий момент. Поскольку затем переключатель 23 размыкается, приводная машина 4 может без ударов отделиться от сети 12. В случае выполнения муфт 22, 31 в виде муфты свободного хода, последняя при этом активируется автоматически. Дифференциальная система работает теперь в рабочем режиме I и может, тем самым, эксплуатироваться пока рабочая частота вращения не станет равной нулю.
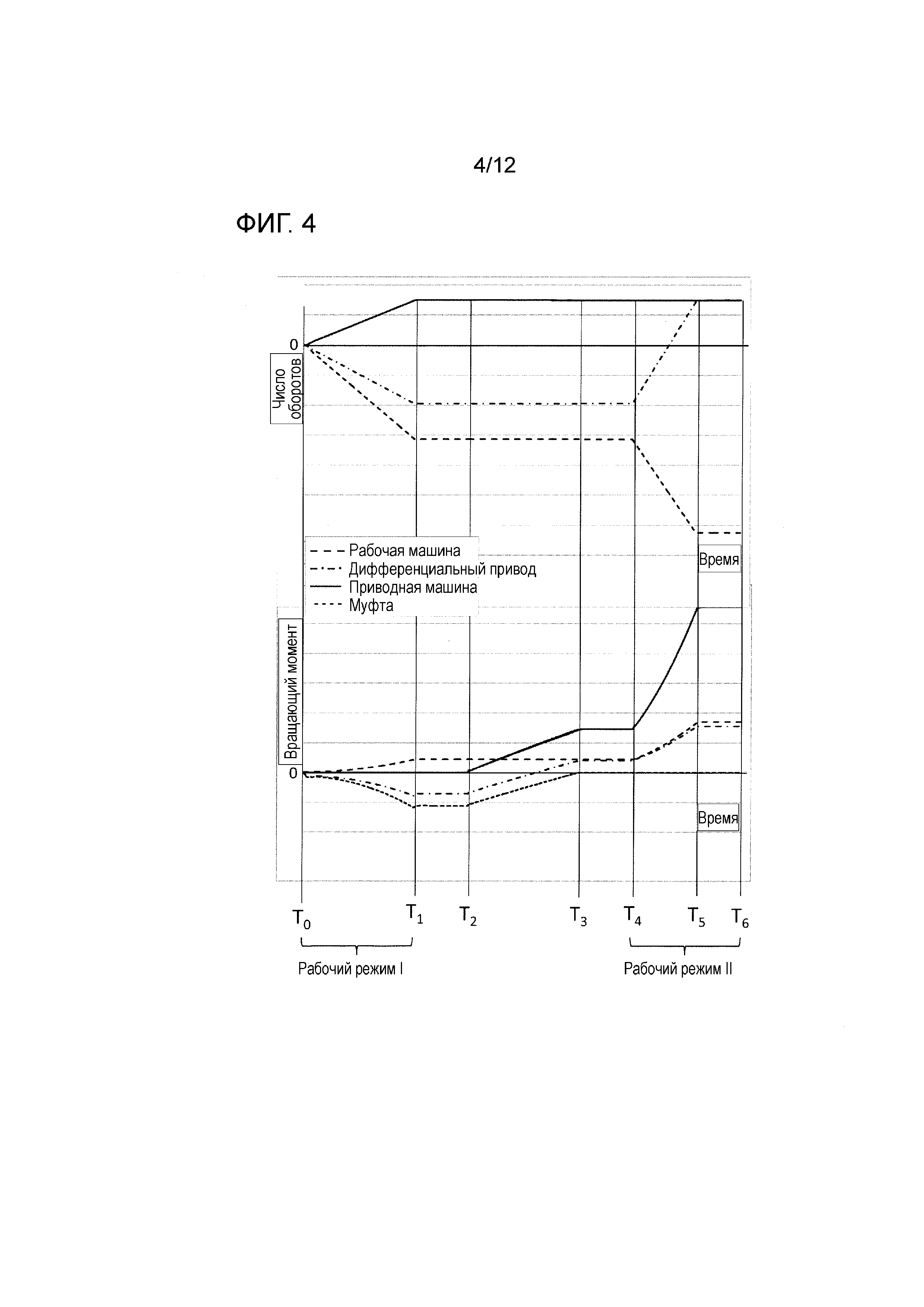
На Фиг.4 показана на безразмерной временной оси кривая изменения вращающего момента и частоты вращения рабочей машины 1, приводной машины 4, дифференциального привода 5 и муфты 22, 31 во время описанных в связи с Фиг.3 фаз.
Фаза 1: в момент времени T0 вся дифференциальная система стоит. Как только дифференциальный привод 5 начинает вращаться, ускоряются также и рабочая машина 1 и приводная машина 4 до тех пор, пока последняя не достигнет своей рабочей частоты вращения - на Фиг.4 обозначено как T1. Между отметками на шкале времени T0 и T1 дифференциальная система работает в рабочем режиме I.
Фаза 2: на следующем этапе работавшая до этого момента без нагрузки приводная машина 4 синхронизируется с сетью 12, и в момент времени T2 переключатель 23 замыкается.
Вслед за этим на следующем этапе (между T2 и T3) вращающий момент дифференциального привода 5 регулированием переводится из двигательного режима в генераторный режим (вращающий момент дифференциального привода 5 изменяет направление). За счет этого приводная машина 4 непрерывно нагружается все сильнее (вращающий момент приводной машины 4 возрастает) до тех пор, пока дифференциальная система предпочтительно не достигнет нижней рабочей точки рабочего диапазона частоты вращения рабочего режима II. Вследствие возникающего при этом нового распределения нагрузки в дифференциальной системе первоначально проходящий через муфту 22, 31 вращающий момент регулируется до нуля, и муфта 22, 31 открывается, соответственно, в случае муфты свободного хода деактивируется при этом автоматически. В момент времени T4 фаза 2, таким образом, завершается.
Частоты вращения для приводной и выходной частей дифференциальной системы в фазе 2 предпочтительно остаются по существу постоянными, однако, могут и варьироваться вследствие обусловленных режимом требований к рабочей машине 1, соответственно, к процессу синхронизации приводной машины 4. В этом отношении наложение рабочих частот вращения в рабочих режимах I и II является преимуществом, так как благодаря этому можно скомпенсировать возможно возникающие между моментами T1 и T2 колебания частоты вращения и, таким образом, приводная машина 4 может соединяться с сетью 12 без ударов.
Фаза 3: дифференциальная система теперь работает между моментами времени T4 и T6 в рабочем режиме II (= дифференциальный режим). При этом область между T4 и T5 показывает область частичной нагрузки, в которой мощность системы регулируется изменяемым образом до тех пор, пока она остается между моментами T5 и T6, например, при номинальной мощности с постоянным номинальным вращающим моментом и постоянной номинальной частотой вращения (поэтому на Фиг.4 представлена постоянной линией). В области между T4 и T5 дифференциальный привод 5 меняет режим с генераторного на двигательный, что можно видеть по его частоте вращения (частота вращения «дифференциального привода»).
Эксплуатация дифференциальной системы в рабочем режиме II с более высокой частотой вращения, чем номинальная частота вращения, в принципе возможна, причем дифференциальный привод 5 в таком случае нужно эксплуатировать в области ослабления поля. При этом его вращающий момент в соответствии с известными правилами техники доступен лишь ограниченно.
Частота вращения приводной машины 4 (частота вращения «приводной машины») в рабочем режиме II в случае машины трехфазного тока остается по существу постоянной.
Если муфта 22, соответственно, 31 выполнена как муфта свободного хода, то активирование/деактивирование муфты 22, 31 завершается автоматически, вследствие чего возможен плавный переход между описанными фазами/режимами.
Указанные на Фиг.4 временные отношения по оси времени могут настраиваться индивидуально и ориентируются по расчетным критериям дифференциальной системы, соответственно, эксплуатационным требованиям.
Описанная концепция эксплуатации аналогично действительна и для эксплуатации в генераторном режиме, например, энергетической установки. В случае использования предлагаемой изобретением системы в энергетической установке рабочая машина 1 представляет собой, например, ветроэнергетическую установку или гидравлическую турбину, а приводная машина 4 является электрической машиной, которая эксплуатируется по существу в генераторном режиме. Вследствие этого поток мощности во всем силовом агрегате разворачивается по сравнению с представленным на Фиг.1 - Фиг.12, как, соответственно, и его описание. Среди прочего это касается и описанного здесь в связи с Фиг. 4 регулирования направления вращающего момента дифференциального привода 5 между T2 и T3.
Если дифференциальная система используется для так называемого турбонасоса (рабочая машина работает периодически как турбина, а периодически как насос), то с помощью предлагаемой изобретением системы могут быть реализованы как генераторный режим (турбина), так и двигательный режим (насос), причем возможно бесступенчатое переключение с одного вида работы на другой. Переход с одного режима (турбины) на другой (насос) происходит при этом предпочтительно в момент T0.
В принципе описываемая здесь концепция распространяется и на описанные в связи с Фиг.2 - Фиг.12 функции и варианты выполнения.
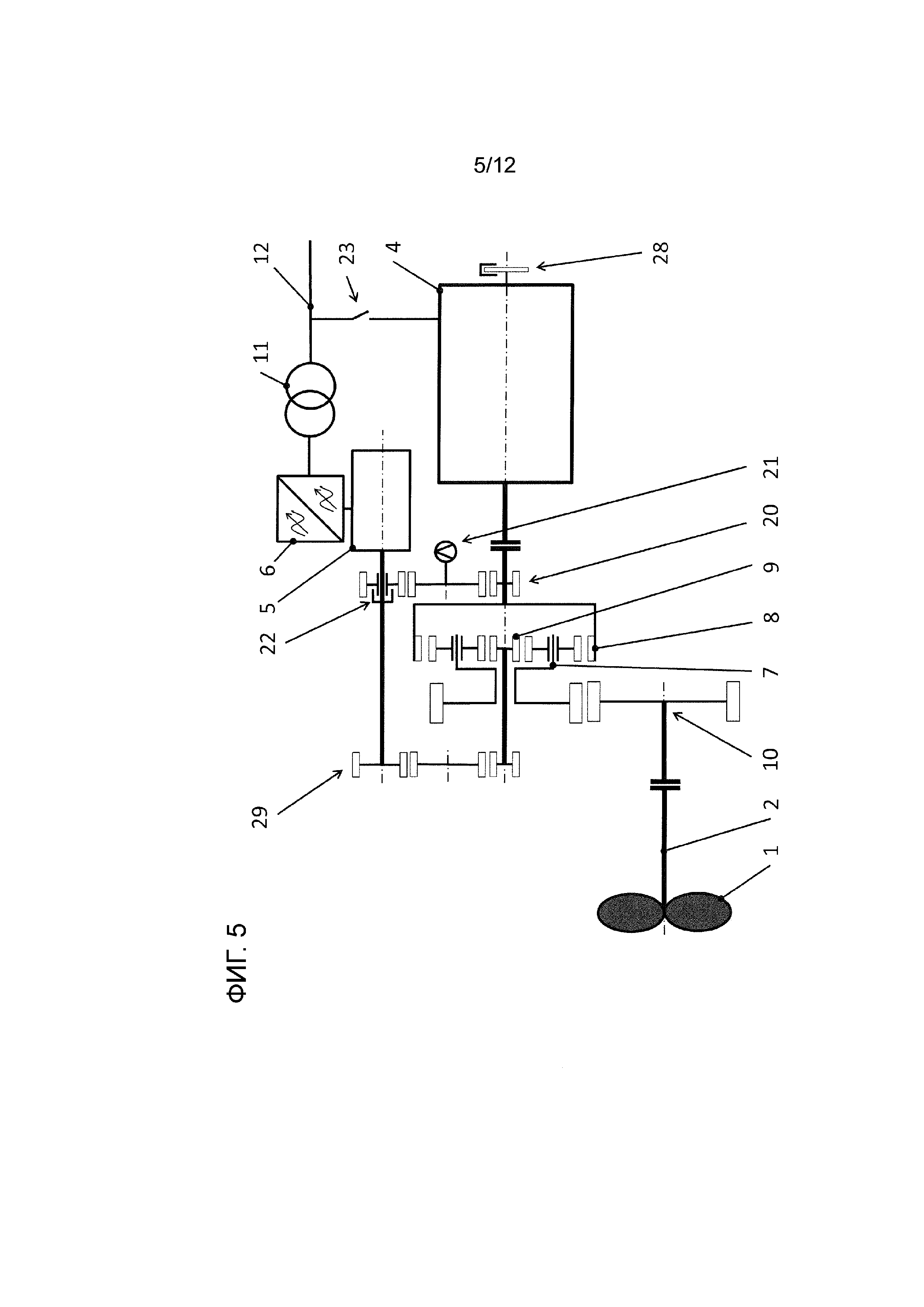
На Фиг.5 показан предлагаемый изобретением вариант выполнения дифференциальной системы предпочтительно для приводов медленного действия. Этот принцип следует из разъяснений к Фиг.1, Фиг.2 и Фиг.3, и она может применяться также для быстродействующих приводов. Существенное отличие от концепции по Фиг.2 и Фиг.3 заключается в том, что дифференциальный привод 5 соединяется с солнечным колесом 9 как вторым приводом дифференциальной системы (вместо водила планетарной передачи 16 на Фиг.2 и Фиг.3), а рабочая машина 1 соединяется с водилом 7 планетарной передачи (вместо солнечного колеса 13 по Фиг.2 и Фиг.3).
Посредством муфты 22 дифференциальный привод 5 может соединяться с вспомогательным приводом 20 и предпочтительно приводит в действие также масляный насос 21. Муфта 22 может быть позиционирована любым образом в цепи между дифференциальным приводом 5 и соединительным валом 19, однако, чтобы обеспечить аварийный режим работы смазочной системы, она предпочтительно расположена между масляным насосом 21 и дифференциальным приводом 5.
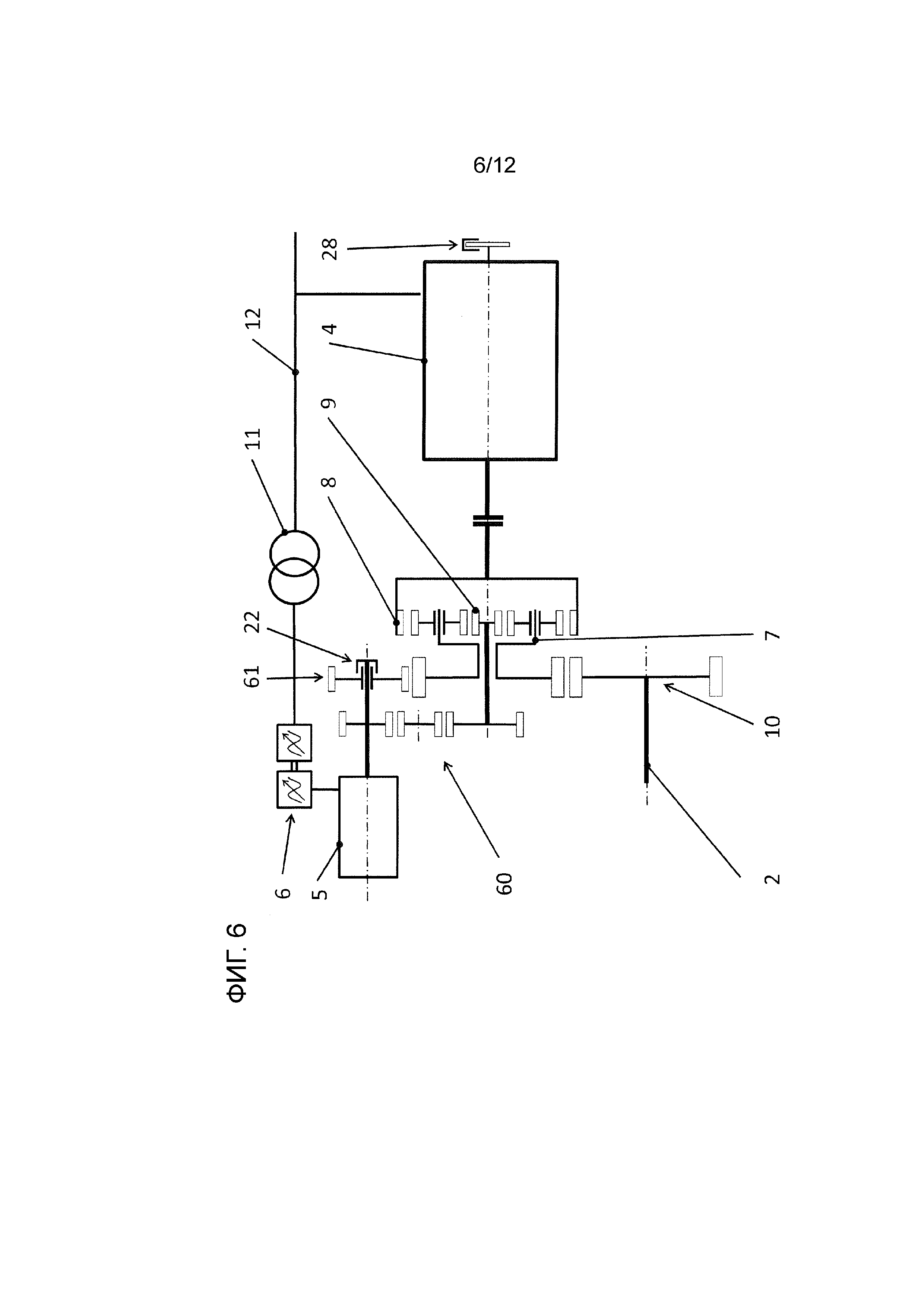
На Фиг.6 показан еще один предлагаемый изобретением вариант выполнения, в котором дифференциальный привод 5 может быть соединен со вторым приводом и с выходной частью дифференциальной системы. В этом варианте выполнения дифференциальный привод 5 с одной стороны соединен со вторым приводом дифференциальной системы, а с другой стороны посредством муфты 22 и через вспомогательный привод 61 соединен с выходной частью дифференциальной системы и, соответственно, с приводным валом 2. В принципе то же справедливо и для уже описанного в связи с Фиг.2 - Фиг.5, только дифференциальный привод 5 приводит в действие как приводной вал 2, так и приводную машину 4 через водило 7 планетарной передачи и коронное колесо 8. Ступень 60 согласующего механизма на Фиг.6 предусмотрена для оптимизации диапазона регулирования частоты вращения дифференциального привода 5.
На Фиг.7 показан другой предлагаемый изобретением вариант выполнения, в котором дифференциальный привод 5 дифференциальной системы соединен со вторым приводом и с выходной частью. В отличие от варианта выполнения по Фиг.6 здесь второй привод соединен с коронным колесом 63, первый привод соединен с водилом 64 планетарной передачи, а выходная часть - с солнечным колесом 65. Вследствие этого дифференциальный привод 5 через передаточную ступень 66 и снабженное внешним зубчатым венцом коронное колесо 63 регулирует частоту вращения приводного вала 2. Для разгона дифференциальный привод 5 посредством муфты 31 и вспомогательного привода 62 соединен с выходной частью дифференциальной системы. Для необходимых при рабочем режиме тормозных процессов предусмотрен тормоз 67 (в показанном варианте выполнения представлен символически в виде дискового тормоза), который позиционирован в области выходного вала приводной машины 4, причем тормозные колодки соединены с приводной машиной 4, а тормозной диск предпочтительно соединен с муфтой 33. Если муфта 33 выполнена с защитой от перегрузки (например, с ограничителем вращающего момента), то предпочтительно следует обращать внимание на то, что эта защита от перегрузки располагается не на пути основной нагрузки от тормозного момента, чтобы тем самым не ограничивать максимальный передаваемый тормозной момент. Этот путь основной нагрузки является при этом путем, по которому проходит большая часть тормозного момента тормоза 67. Существенное преимущество описанного позиционирования тормоза 67 на приводной машине 4 состоит в том, что таким образом установка в опорах первого привода дифференциальной системы остается свободной от могущих возникнуть поперечных сил (вследствие неодинаково воздействующих тормозных усилий).
На Фиг.8 показан еще один предлагаемый изобретением вариант выполнения, в котором дифференциальный привод 5 дифференциальной системы через снабженное внешним зубчатым венцом коронное колесо 63 может быть соединен со вторым приводом, а с первым приводом может быть соединен через муфту 22 и вспомогательный привод 68.
Варианты выполнения по Фиг.6, Фиг.7 и Фиг.8 предлагаются, в частности, для применения в качестве рабочей машины 1 в энергетических установках, таких как, например, ветроэнергетические установки. В этом случае приводная машина 4 представляет собой электрическую машину, которая работает по существу в генераторном режиме. Вследствие этого поток мощности во всем силовом агрегате разворачивается (ср. в связи с этим также и пояснения к Фиг.4).
Дифференциальная система при этом предпочтительно является частью так называемой главной трансмиссии, причем приводной вал 2 в большинстве случаев соединен с другими передаточными ступенями этой главной трансмиссии, чтобы для этой рабочей машины достигалась требуемая низкая частота вращения при соответственно высоком вращающем моменте.
На Фиг.9 показан следующий предлагаемый изобретением вариант выполнения, в котором выходная часть может соединяться с первым приводом дифференциальной системы. На этом изображении с одной стороны дифференциальный привод 5 соединен со вторым приводом, а с другой стороны выходная часть дифференциальной системы, соответственно, например, приводной вал 2 через вспомогательный привод 70 посредством муфты 31 может соединяться с первым приводом дифференциальной системы и, соответственно, в дальнейшем может соединяться с приводной машиной 4. В принципе то же справедливо и для уже описанного в связи Фиг.2 - Фиг.8, только дифференциальный привод 5 в рабочем режиме I приводит в действие приводную машину 4 через выходную часть дифференциальной системы, соответственно, в показанном варианте выполнения дополнительно приводит в действие посредством приводного вала 2.
На Фиг.10 показан другой предлагаемый изобретением вариант выполнения, в котором дифференциальный привод 5 через второй привод, передаточный механизм 41 и вспомогательный привод 42 может соединяться с первым приводом дифференциальной системы.
На Фиг.11 показан предлагаемый изобретением вариант выполнения дифференциальной системы с так называемой положительной зубчатой передачей (называемой также планетарной передачей). При этом приводной вал 19 первого привода дифференциальной системы соединен с первым солнечным колесом 44, а рабочая машина 1 соединена со вторым солнечным колесом 45. Водило 46 планетарной передачи снабжено двумя или более ступенчатыми сателлитными колесами 47, 48. Ступенчатые сателлитные колеса характеризуются тем, что эти планетарные колеса имеют по два зубчатых колеса 47, 48, которые соединены друг с другом без возможности проворачивания и имеют разные диаметры начальной окружности. В представленном варианте выполнения изобретения зубчатое колесо 48 взаимодействует с солнечным колесом 44, а зубчатое колесо 47 взаимодействует с солнечным колесом 45. Дифференциальный привод 5 приводит в действие водило 46 планетарной передачи с переменной частотой вращения. Для реализации рабочего режима I водило 46 планетарной передачи через передаточную ступень 49 и вспомогательный привод 50 может соединяться с первым приводом дифференциальной системы, соответственно, с приводной машиной 4. Направления вращения приводной машины 4 и рабочей машины 1 здесь одинаковы, и передаточная ступень 49 в комбинации с вспомогательным приводом 50 изменяет направление вращения по отношению к водилу 46 планетарной передачи. Показанный вариант выполнения дифференциальной системы в форме положительной зубчатой передачи позволяет маленькое передаточное отношение между приводной машины 4 и рабочей машины 1 и вследствие отсутствия полых колес является экономичным в изготовлении.
На Фиг.12 показан другой предлагаемый изобретением вариант выполнения дифференциальной системы в форме положительной зубчатой передачи. В принципе ее функционирование вытекает из выполнения по Фиг.11. Однако, в этом примере выполнения вспомогательный привод 52 может соединяться с передаточным механизмом 51. В следующем предлагаемом изобретением варианте выполнения дифференциальный привод 5 соединяется непосредственно с валом 55.
Как показано в качестве примера на Фиг.2 - Фиг.12, имеется множество предлагаемых изобретением возможностей реализовать функцию предлагаемого изобретением разгона. В принципе всегда речь идет о запараллеливании дифференциальной системы, например, посредством вспомогательного привода 20, 30, 42, 50, 52, 53, 61, 62, 68, 70, так что приводная машина 4 достигает своей рабочей частоты вращения, как только рабочая машина 1 примерно достигнет нижней рабочей частоты вращения в рабочем режиме II. Однако, как уже объяснялось, может иметь место более или менее значительное перекрытие рабочих диапазонов частоты вращения режимов I и II или разрывы в значениях рабочей частоты вращения. Согласно изобретению, однако, во всех вариантах выполнения приводная машина 4 и рабочая машина 1 с помощью дифференциального привода 5 разгоняются параллельно.
На Фиг.13 показан еще один предлагаемый изобретением вариант выполнения дифференциальной системы для энергетической установки. В случае использования предлагаемой изобретением системы в энергетической установке приводная машина 42 является электрической машиной, которая работает по существу в генераторном режиме - предпочтительно это синхронная машина среднего напряжения с независимым возбуждением (см. также пояснения к Фиг.4 и Фиг.8).
Рабочая машина 38 (например, ротор ветроэнергетической установки) при этом через главную трансмиссию 39 приводит в действие водило планетарной передачи дифференциальной ступени 40. Описанная в связи с Фиг.1 - Фиг.12 приводная машина в диапазоне рабочего режима эксплуатируется, тем самым, как генератор 42. Подключенный к сети 12 через преобразователь 6 и трансформатор 11 дифференциальный привод 5 посредством вала 35 (который коаксиально проходит в пустотелом валу ротора 43 генератора 42) соединен со вторым приводом дифференциальной передачи 40. Дифференциальный привод 5 посредством вспомогательного привода 53 и муфты 54 может соединяться с роторным валом 43 приводной машины 42, причем водило планетарной передачи вспомогательного привода 53 без возможности проворачивания соединено с корпусом генератора 42, соответственно, интегрировано в него. Для выполнения муфты 54 в принципе справедливо то же, что и для муфты 22, 31. Вспомогательный привод 53, схематично представленный как планетарная ступень, может быть также заменен одной/несколькими ступенями цилиндрических или конических колес. Это справедливо, в частности, в том случае, если согласно AT 511 720 A дифференциальная система выполнена с несколькими дифференциальными приводами, соединенными через ступень зубчатых цилиндрических прямозубых колес. В принципе, однако, может использоваться любой вид передач, соответственно, ременных приводов и подобных устройств.
Вместо дифференциального привода 5 может применяться гидростатическая регулируемая передача. При этом дифференциальный привод 5 и преобразователь 6 заменяются комбинацией состоящего из двух или более частей гидростатической комбинации насос/мотор, которые соединены с напорным трубопроводом и предпочтительно могут регулироваться в объеме протекающей среды. Таким образом, частоты вращения являются регулируемыми, как в случае электрического дифференциального привода с регулируемой частотой вращения. При этом часть комбинации насос/мотор предпочтительно соединена с приводным валом 2 и/или посредством электрического привода по меньшей мере периодически соединена с сетью 12, и/или часть комбинации насос/мотор периодически приводится в действие посредством другого приводного узла.
Этот вариант выполнения может применяться аналогично и при использовании гидродинамического преобразователя вращающего момента в качестве дифференциального привода.
Изобретение может также применяться для того, чтобы эксплуатировать приводную машину 4, соответственно, генератор 42 в так называемом режиме фазового сдвига. Т.е. для того, чтобы приводная машина либо как двигатель 4, либо, соответственно, как генератор 42 могла подавать реактивный ток в сеть 12, соответственно, потреблять из сети 12, не эксплуатируя рабочую машину 1. При этом приводная машина 4, соответственно, 42 предпочтительно посредством дифференциального привода 5 просто синхронизируется с сетью 12 и соединяется, а затем дифференциальный привод 5 предпочтительно путем открытия муфты 22, 31, 54 отделяется от приводной машины 4, 42, без осуществления дальнейших этапов описанного процесса запуска. Это происходит лишь тогда, когда рабочая машина 1 смогла войти в рабочий режим.
Реферат
Изобретение относится к трансмиссиям. В способе приведения в действие трансмиссии, содержащей приводной вал рабочей машины, приводную машину и дифференциальную передачу с тремя приводными, соответственно, выходными частями, причем выходная часть соединяется с приводным валом, первая приводная часть соединяется с приводной машиной, а вторая приводная часть соединяется с дифференциальным приводом, приводную машину разгоняют с частоты вращения, равной нулю или примерно нулю, в то время как приводная часть одновременно соединена с другой приводной частью или с выходной частью. Дифференциальный привод при нарушении режима работы соединяют как с первой, так и второй приводной частью или с выходной частью. Повышается рабочий диапазон частоты вращения. 13 з.п. ф-лы, 13 ил.
Комментарии