Уравновешенная конструкция эксцентрического зубчатого колеса и способ - RU2721326C2
Код документа: RU2721326C2
Чертежи
Описание
Область техники
Это раскрытие в целом относится к электродвигателям. В частности, варианты реализации настоящего раскрытия относятся к поверхности взаимодействия зубчатого колеса в виде качающейся шайбы (wobble plate).
Уровень техники
Электродвигатели вырабатывают механическую энергию из энергии электромагнитного поля. Двигатель переменного тока обычно содержит ротор и стационарный статор. Стационарный статор обычно содержит обмотки из электрических проводов, по которым проходит переменный ток, вырабатывающий вращающееся магнитное поле. Некоторые роторы выполнены из ферромагнитных материалов, отвечающих на вращающееся магнитное поле, выработанное статором, и при повороте магнитного поля статора ротор будет выполнять физический поворот. Посредством связи ротора с выходным валом происходит преобразование электромагнитной энергии переменного тока в поворотную механическую энергию выходного вала.
Два или большее количество зубчатых колес могут быть использованы для получения механического преимущества посредством передаточного отношения. Существует много способов расположения зубчатых колес таким образом, что один поворот первого зубчатого колеса приводит к большему или меньшему, чем один поворот, количеству поворотов второго зубчатого колеса за тот же самый промежуток времени. Передаточное отношение равно отношению величин этих двух поворотов. В случае величины поворота второго зубчатого колеса, меньшей величины поворота первого зубчатого колеса, говорят, что эта комбинация зубчатых колес обеспечивает понижение передачи. При определенном использовании желательно иметь электродвигатель переменного тока с очень высоким значением передаточного отношения с понижением передачи, происходящим в самом малом объеме. Например, привод, преобразующий множество осцилляций электрического тока в один поворот выходного вала, может иметь очень точное управление.
С момента своего возникновения приводные приспособления с качающейся шайбой представлялись перспективным маршрутом к созданию двигателя, имеющего высокое значение передаточного отношения в пределах небольшого объема. Примеры таких приводных приспособлений с качающейся шайбой раскрыты в патентных публикациях США №US 20140285072 и №US 20150015174. Более старые системы раскрыты в патентах US 2275827 и US 3249776.
В приспособлении с качающейся шайбой одно из зубчатых колес, например зубчатое колесо ротора, выполняет нутацию вокруг другого зубчатого колеса, например зубчатого колеса статора. При отличии на единицу количества зубьев на зубчатом колесе ротора и на зубчатом колесе статора такая система имеет передаточное отношение, равное количеству зубьев на зубчатом колесе статора.
В принципе, передаточные отношения в приводных приспособлениях с качающейся шайбой могут быть довольно высокими. С точки зрения приводное приспособление с качающейся шайбой, использующее только два зубчатых колеса, может достигать очень высоких значений отношения в небольшом объеме. Однако на практике работоспособные и эффективные системы привода с качающейся шайбой оказались труднодостижимыми, поскольку возникающие при этом силы часто приводят к разъединению приспособления или к недопустимым уровням вибраций.
Сделанное здесь раскрытие настоящего изобретения имеет отношение к этим и другим соображениям.
Раскрытие изобретения
Улучшенная система привода с качающейся шайбой раскрыта в различных вариантах реализации. Эти системы привода с качающейся шайбой могут содержать статор, имеющий центральную ось, верхнюю поверхность, перпендикулярную центральной оси, и множество зубьев статора, расположенных на верхней поверхности. Система может дополнительно содержать качающуюся шайбу, имеющую ось качания, размещенную под углом, отличным от нуля, относительно центральной оси, нижнюю поверхность качания, перпендикулярную оси качания, и верхнюю поверхность качания, перпендикулярную оси качания.
Множество нижних зубьев качания может быть расположено на нижней поверхности качания, а множество верхних зубьев качания может быть расположено на верхней поверхности качания. Система может содержать выходное зубчатое колесо, имеющее выходную ось, по существу совпадающую с центральной осью, и нижнюю поверхность, перпендикулярную выходной оси. Множество выходных зубьев может быть расположено на нижней поверхности. Качающаяся шайба может быть выполнена с возможностью поворота при ее нутации вокруг статора.
Способ работы приводного приспособления с качающейся шайбой может включать нутацию ротора относительно опоры. Ротор может содержать множество нижних зубьев ротора и множество верхних зубьев ротора. Способ может дополнительно включать побуждение первой стороны ротора нажимать на стационарный статор в первой точке. Статор может содержать множество зубьев статора. Способ может дополнительно включать побуждение второй стороны ротора нажимать на выходную пластину во второй точке. Вторая течка может быть размещена на противоположной от первой точки стороне ротора, а выходная пластина может содержать множество выходных зубьев. Способ может включать взаимодействие нижних зубьев ротора с зубьями статора и верхних зубьев ротора с выходными зубьями при выполнении ротором нутации относительно опоры.
Зубчатое колесо для использования с выполняющей нутацию качающейся шайбой может содержать центральную ось, поверхность, перпендикулярную центральной оси, внутренний диаметр и внешний диаметр. Набор зубьев может быть расположен на поверхности между внутренним диаметром и внешним диаметром. По меньшей мере один зуб из набора зубьев может содержать первую ведущую поверхность, вытянутую от внутреннего диаметра до внешнего диаметра. Первая ведущая поверхность может быть определена составной эвольвентой окружности и эллипса. По меньшей мере один из набора зубьев может быть расположен на поверхности между внутренним диаметром и внешним диаметром.
Настоящее раскрытие описывает различные устройства и способы их использования. В некоторых вариантах реализации настоящего изобретения устройство может содержать статор, качающуюся шайбу / ротор и выходную пластину / выходное зубчатое колесо. В некоторых вариантах реализации настоящего изобретения качающаяся шайба / ротор может выполнять нутацию вокруг статора и выходной пластины / выходного зубчатого колеса при повороте выходной пластины/выходного зубчатого колеса. В определенных вариантах реализации настоящего изобретения каждый элемент из статора, качающейся шайбы / ротора и выходной пластины / выходного зубчатого колеса может содержать набор зубьев, имеющих формы, предназначенные для ограничения эксцентрично приложенных сил. Признаки, функции и преимущества могут быть достигнуты независимо в различных вариантах реализации настоящего раскрытия, или они могут быть скомбинированы в других вариантах реализации, более подробная информация о которых может быть видна со ссылками на последующие описание и чертежи.
Краткое описание чертежей
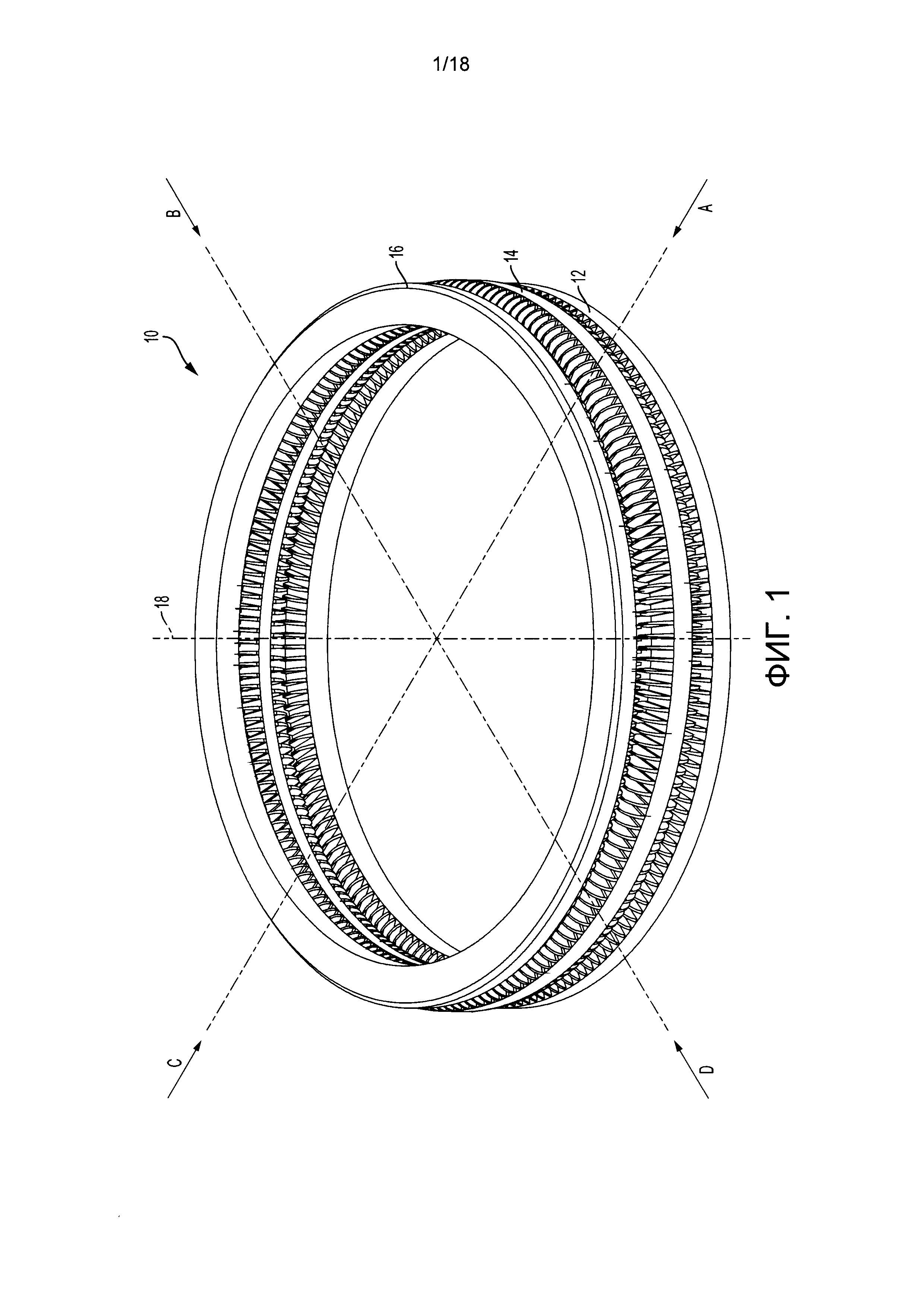
На фиг. 1 схематически показан изометрический вид варианта реализации системы привода с качающейся шайбой.
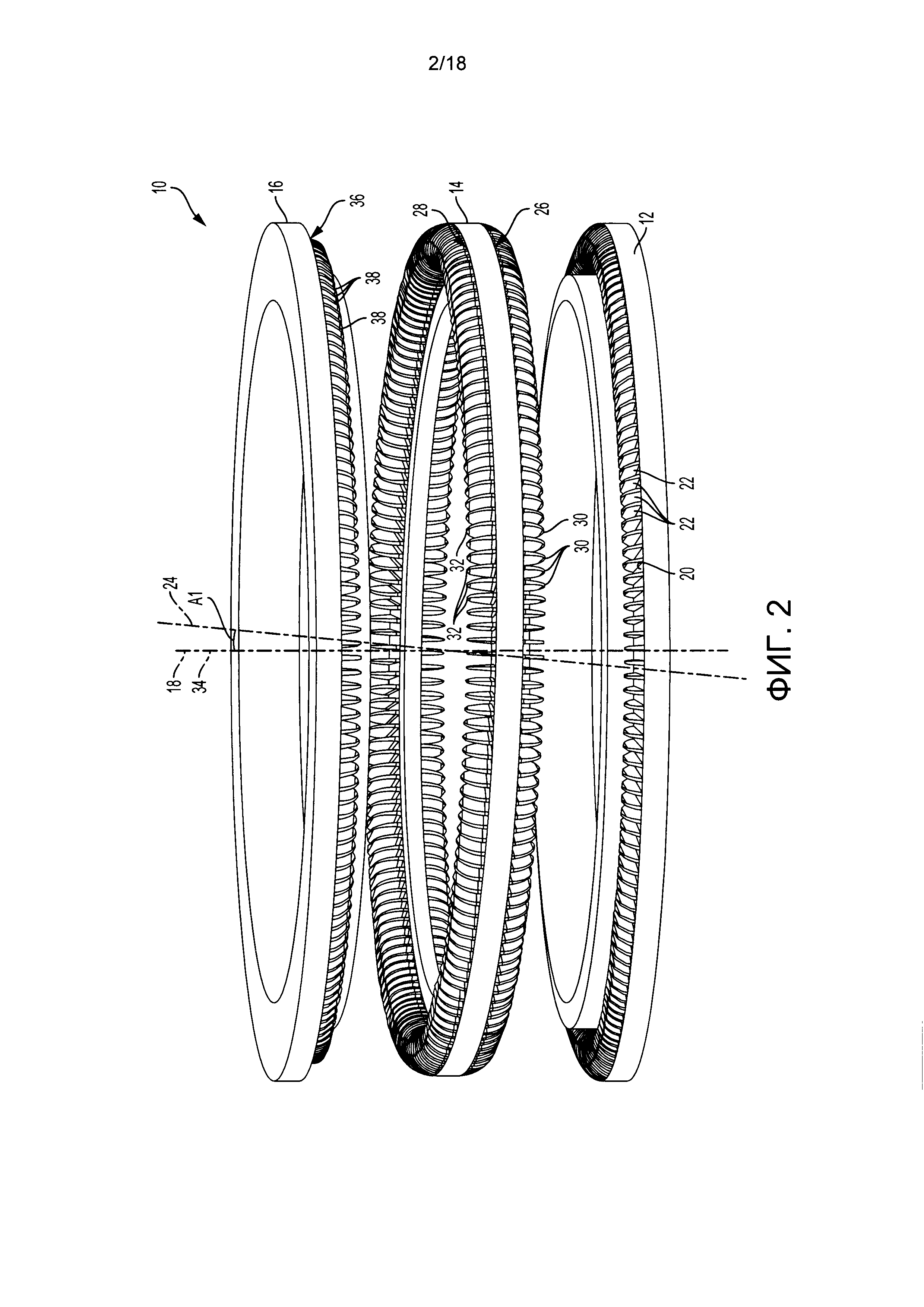
На фиг. 2 схематически показан изометрический вид с пространственным разделением деталей системы привода по фиг. 1.
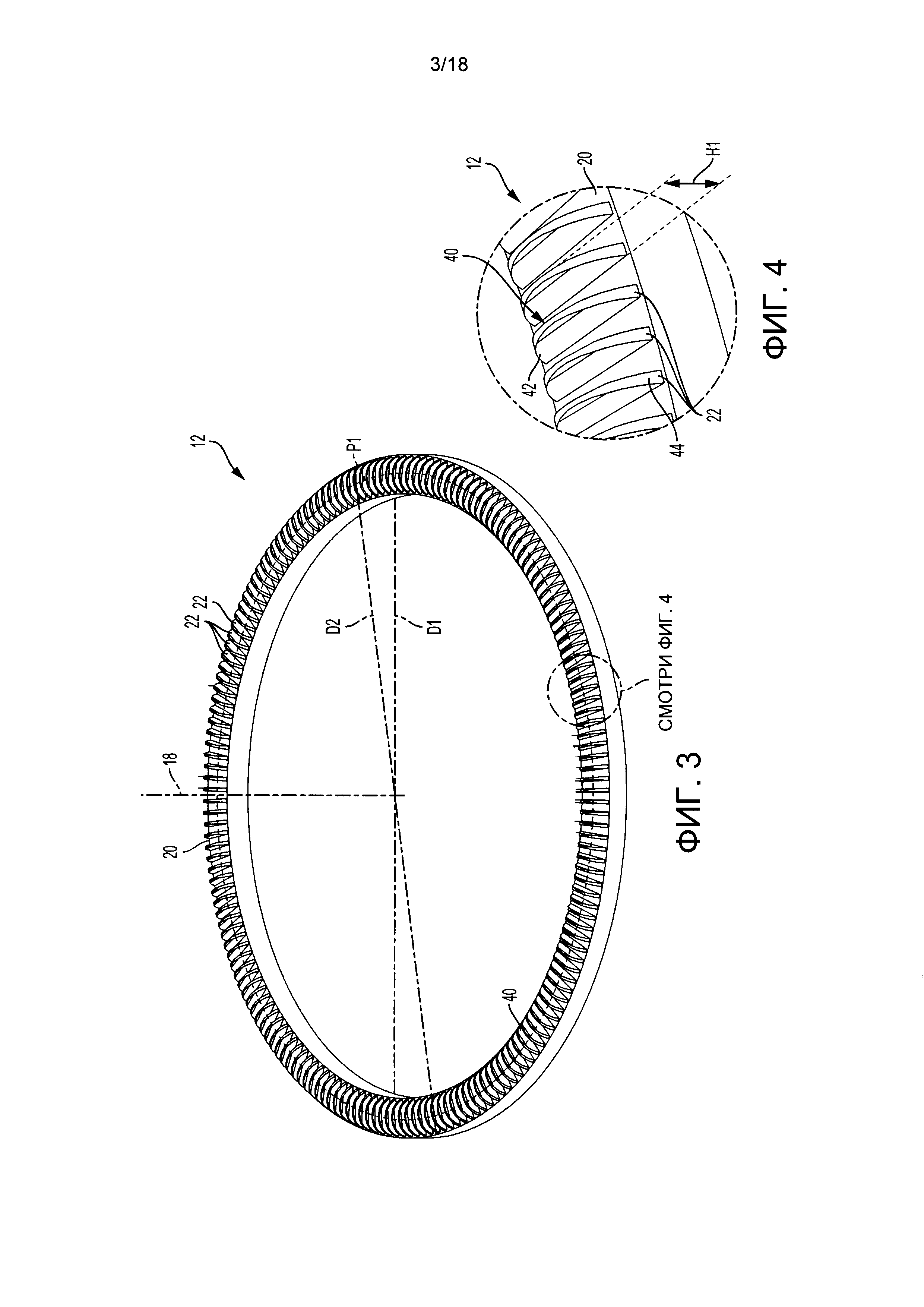
На фиг. 3 схематически показан изометрический вид зубчатого колеса статора для системы привода по фиг. 1, показывающий множество зубьев статора.
На фиг. 4 схематически показан подробный вид по фиг. 3, показывающий множество зубьев статора для зубчатых колес статора по фиг. 4.
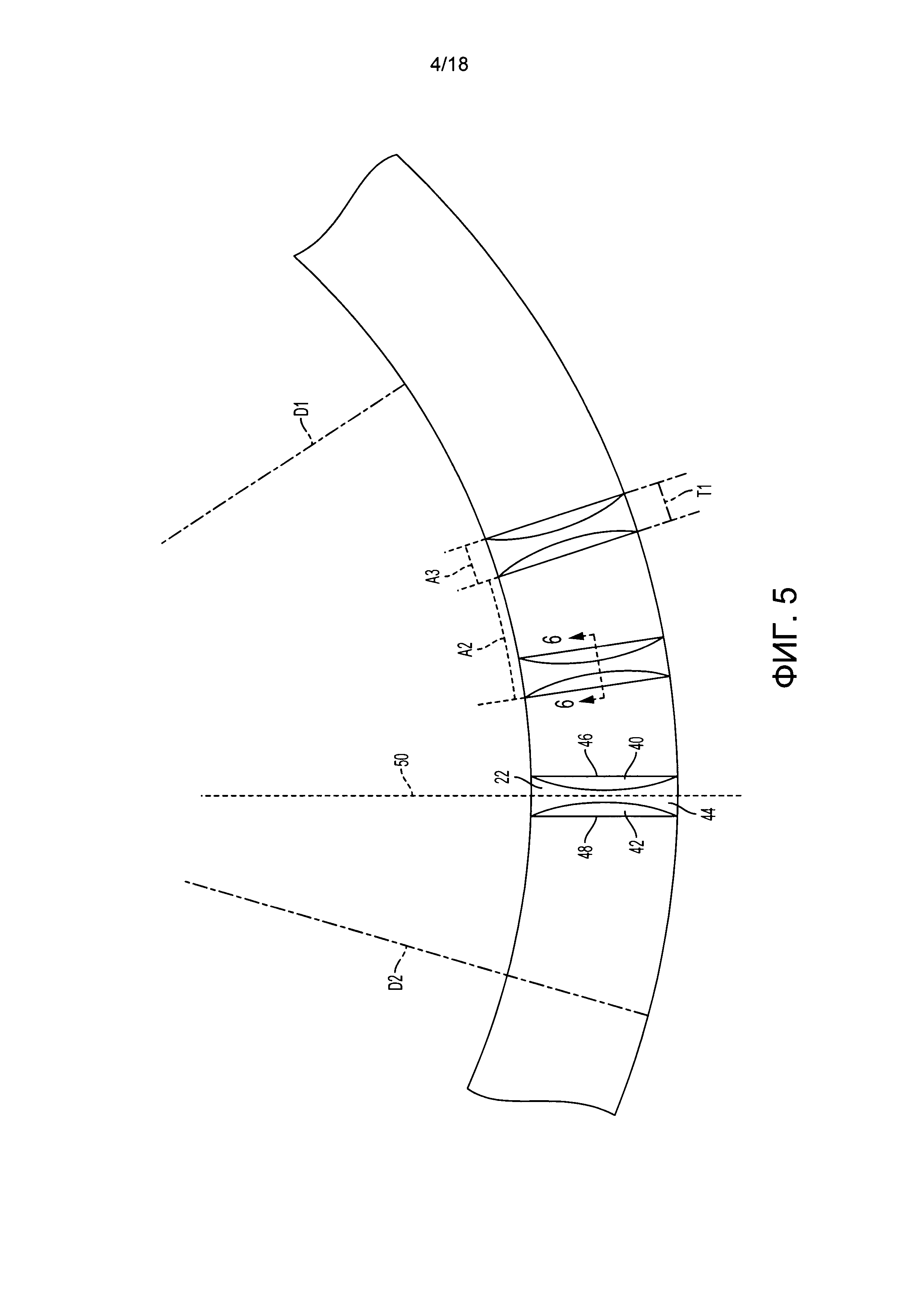
На фиг. 5 схематически показан вид сверху зубчатого колеса статора по фиг. 4, показывающий подмножество зубьев статора.
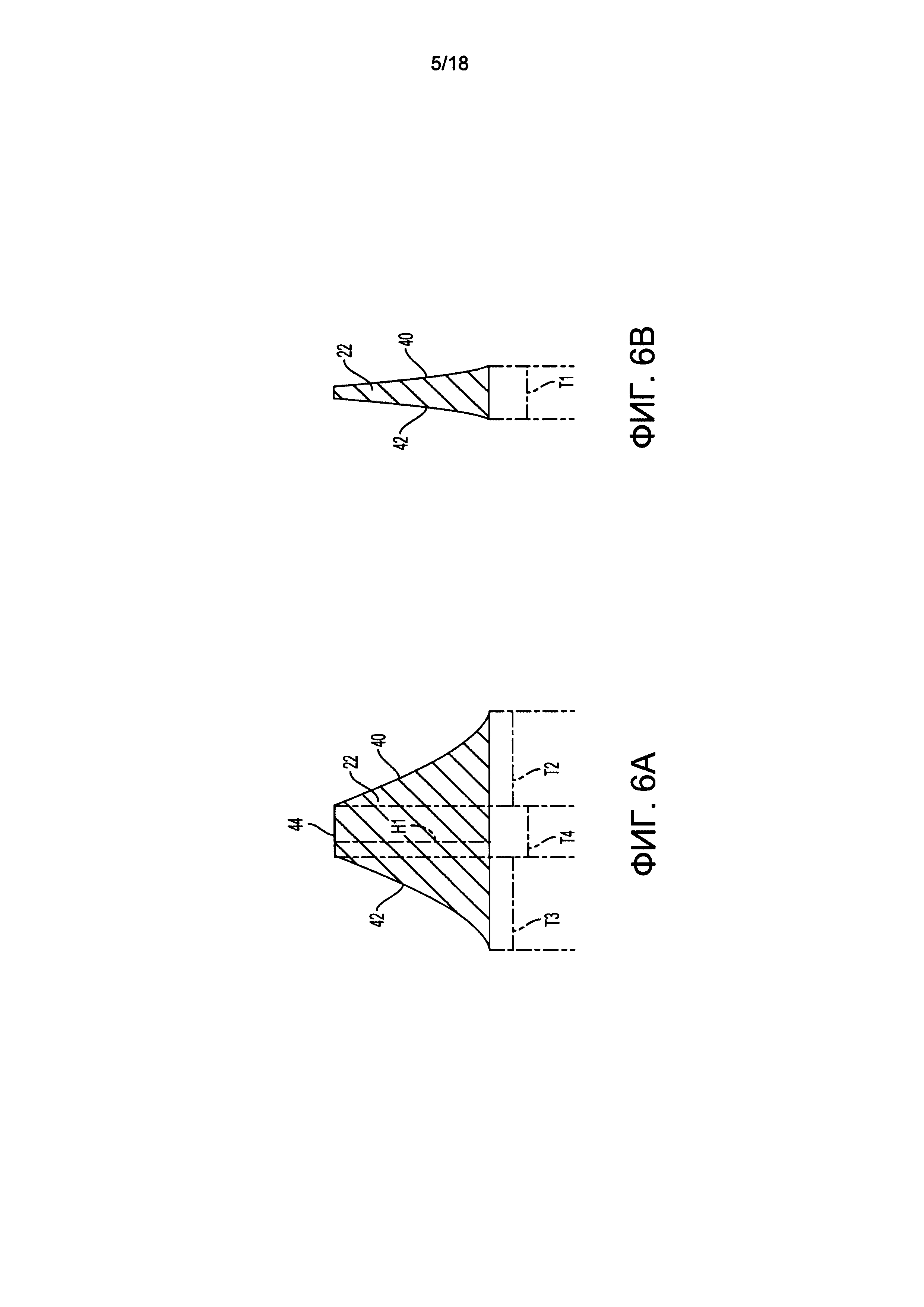
На фиг. 6А схематически показан вид в разрезе одного зуба статора, выполненный вдоль плоскости 6-б на фиг. 5, причем горизонтальная шкала преувеличена для выявления кривизны.
На фиг. 6В схематически показан вид в разрезе одного зуба статора, выполненный вдоль плоскости 6-б на фиг. 5, причем горизонтальная и вертикальная шкалы одинаковы.
На фиг. 7 схематически показан изометрический вид качающейся шайбы в системе привода по фиг. 1, показывающий множество нижних зубьев качания и множество верхних зубьев качания.
На фиг. 8 схематически показан детальный вид по фиг. 7, показывающий определенное количество верхних зубьев качания и нижних зубьев качания качающейся шайбы по фиг. 7.
На фиг. 9 схематически показан вид сверху одного нижнего зуба качания.
На фиг. 10А схематически показан вид в разрезе одного нижнего зуба качания, выполненный вдоль плоскости 10-10 на фиг. 9, причем горизонтальная шкала преувеличена для выявления кривизны.
На фиг. 10В схематически показан вид в разрезе одного нижнего зуба качания, выполненный вдоль плоскости 10-10 на фиг. 9, причем горизонтальная и вертикальная шкалы одинаковы.
На фиг. 11 схематически показан изометрический вид выходного зубчатого колеса системы привода по фиг. 1, показывающий множество выходных зубьев, причем выходное зубчатое колесо размещено в инвертированном положении по сравнению с фиг. 1.
На фиг. 12 схематически показан детальный вид по фиг. 11, показывающий несколько выходных зубьев.
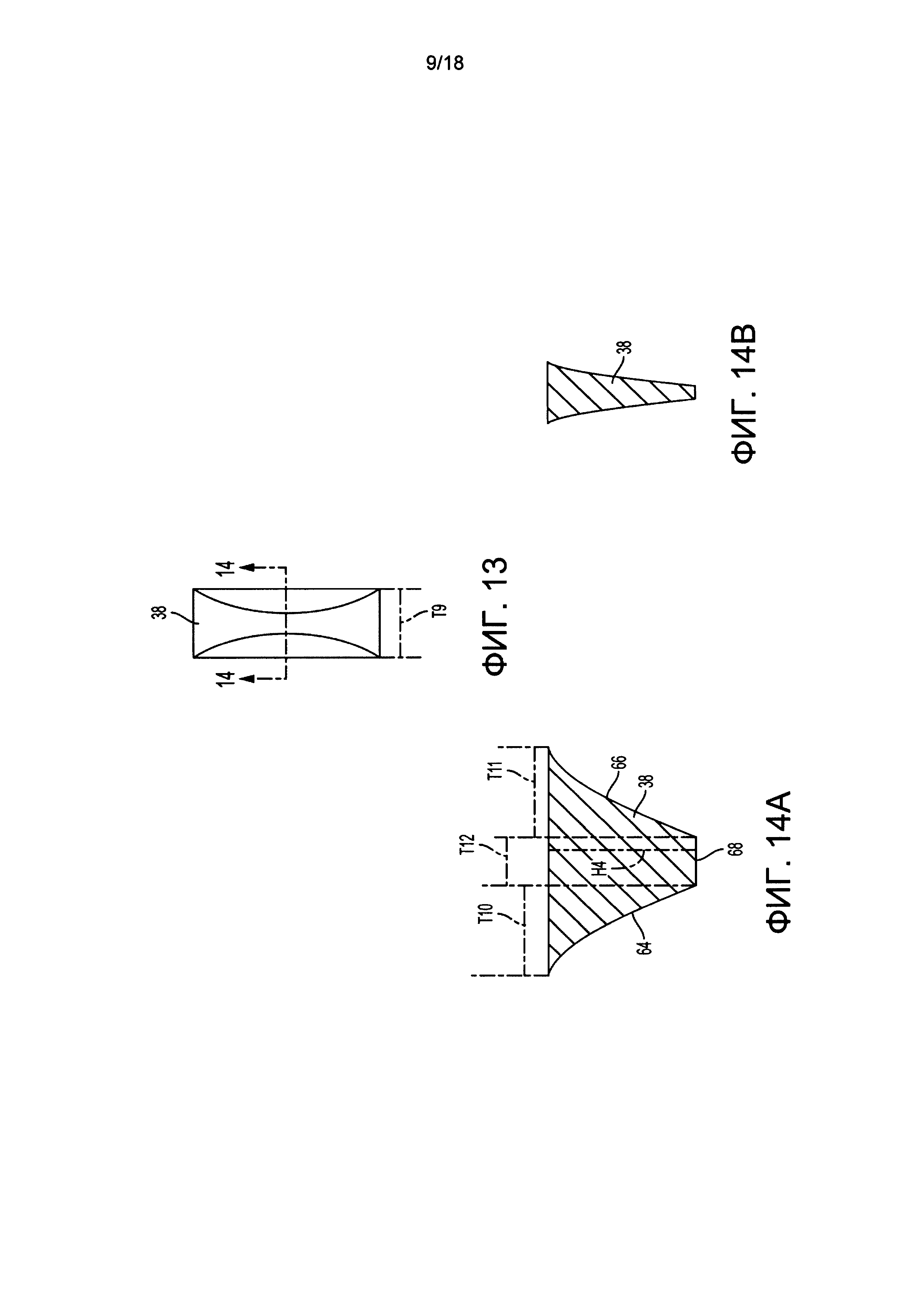
На фиг. 13 схематически показан вид снизу одного выходного зуба.
На фиг. 14А схематически показан вид в разрезе одного выходного зуба, выполненный вдоль плоскости 14-14 на фиг. 13, причем горизонтальная шкала преувеличена для выявления кривизны.
На фиг. 14В схематически показан вид в разрезе одного зуба статора, выполненный вдоль плоскости 14-14 на фиг. 13, причем горизонтальная и вертикальная шкалы одинаковы.
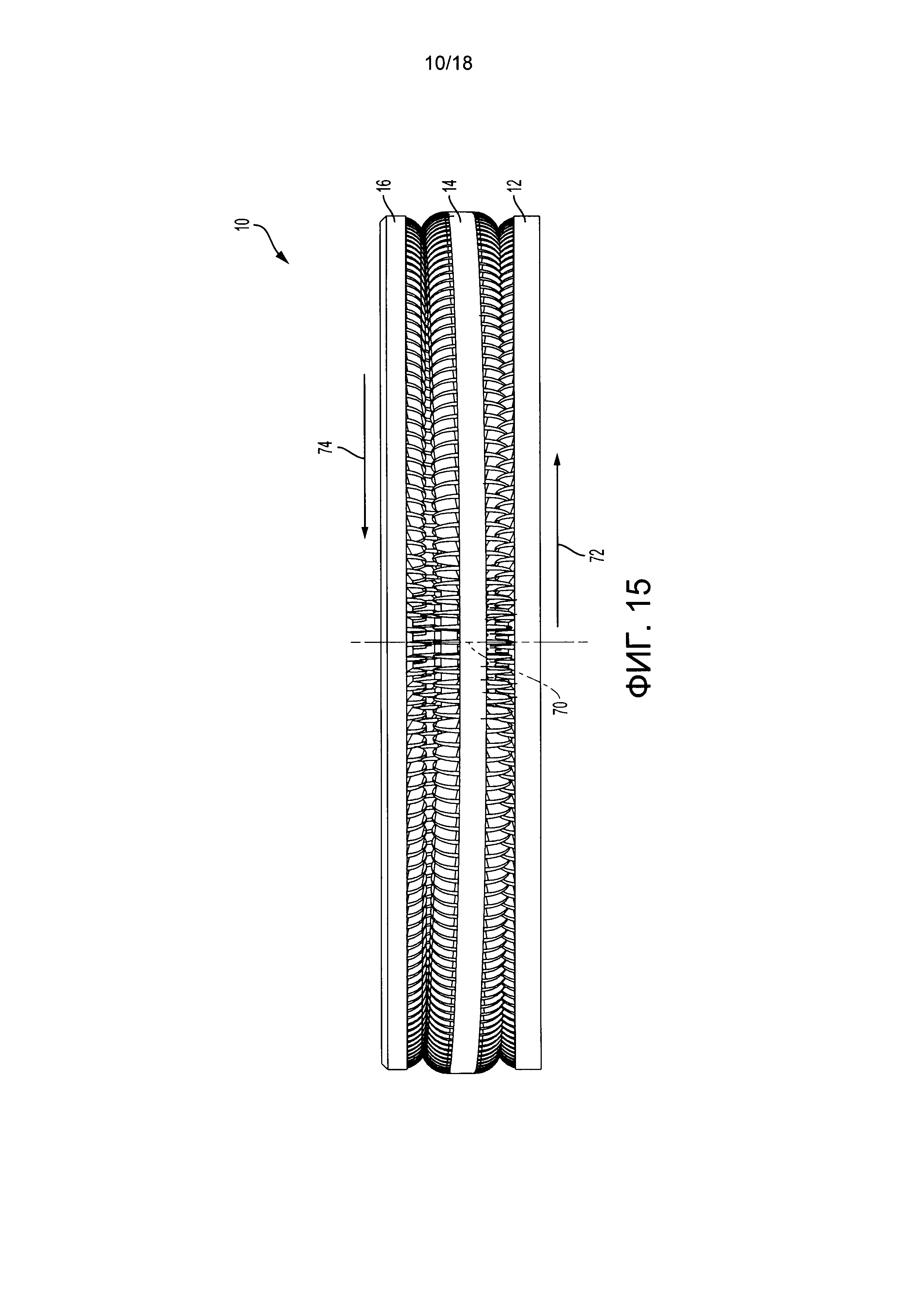
На фиг. 15 схематически показан вид сбоку системы привода по фиг. 1, взятый по направлению А на фиг. 1, показывающий нижнее положение качающейся шайбы.
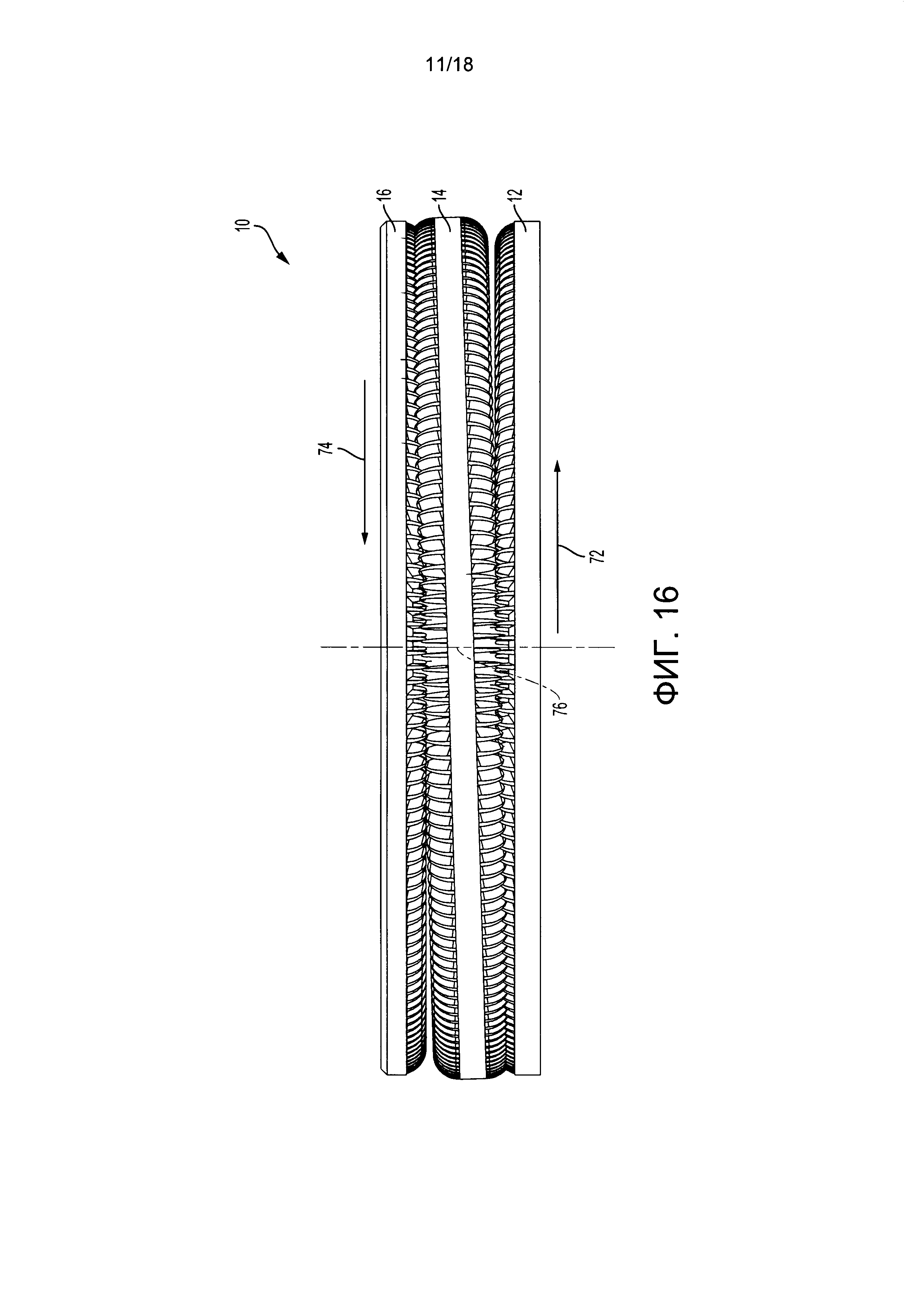
На фиг. 16 схематически показан вид сбоку системы привода по фиг. 1, взятый по направлению В на фиг. 1, показывающий положение, смещенное на 90 градусов, что является четвертью пути вокруг системы привода из нижнего положения.
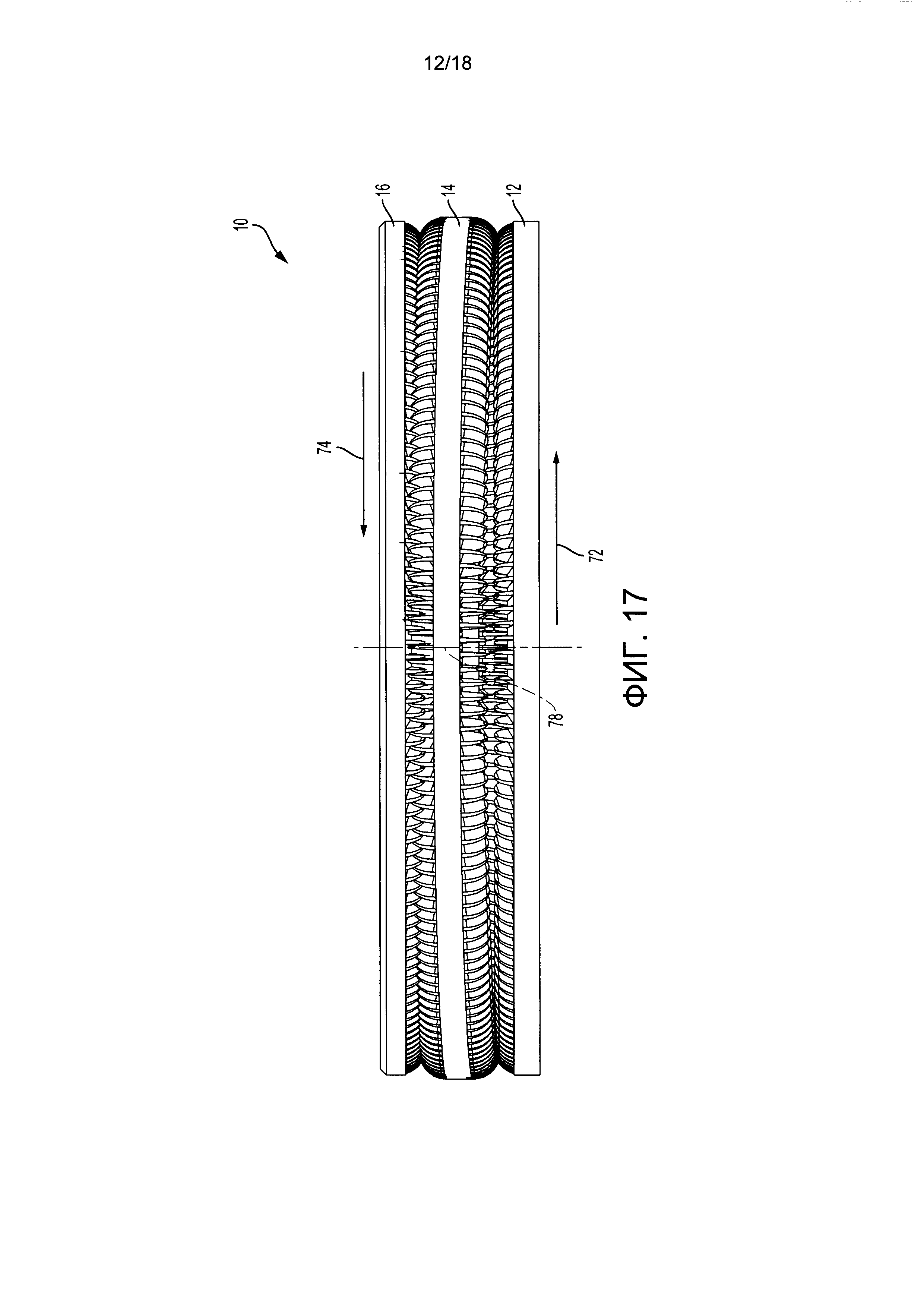
На фиг. 17 схематически показан вид сбоку системы привода по фиг. 1, взятый по направлению С на фиг. 1, показывающий положение, смещенное на 180 градусов, что является половиной пути вокруг системы привода из нижнего положения.
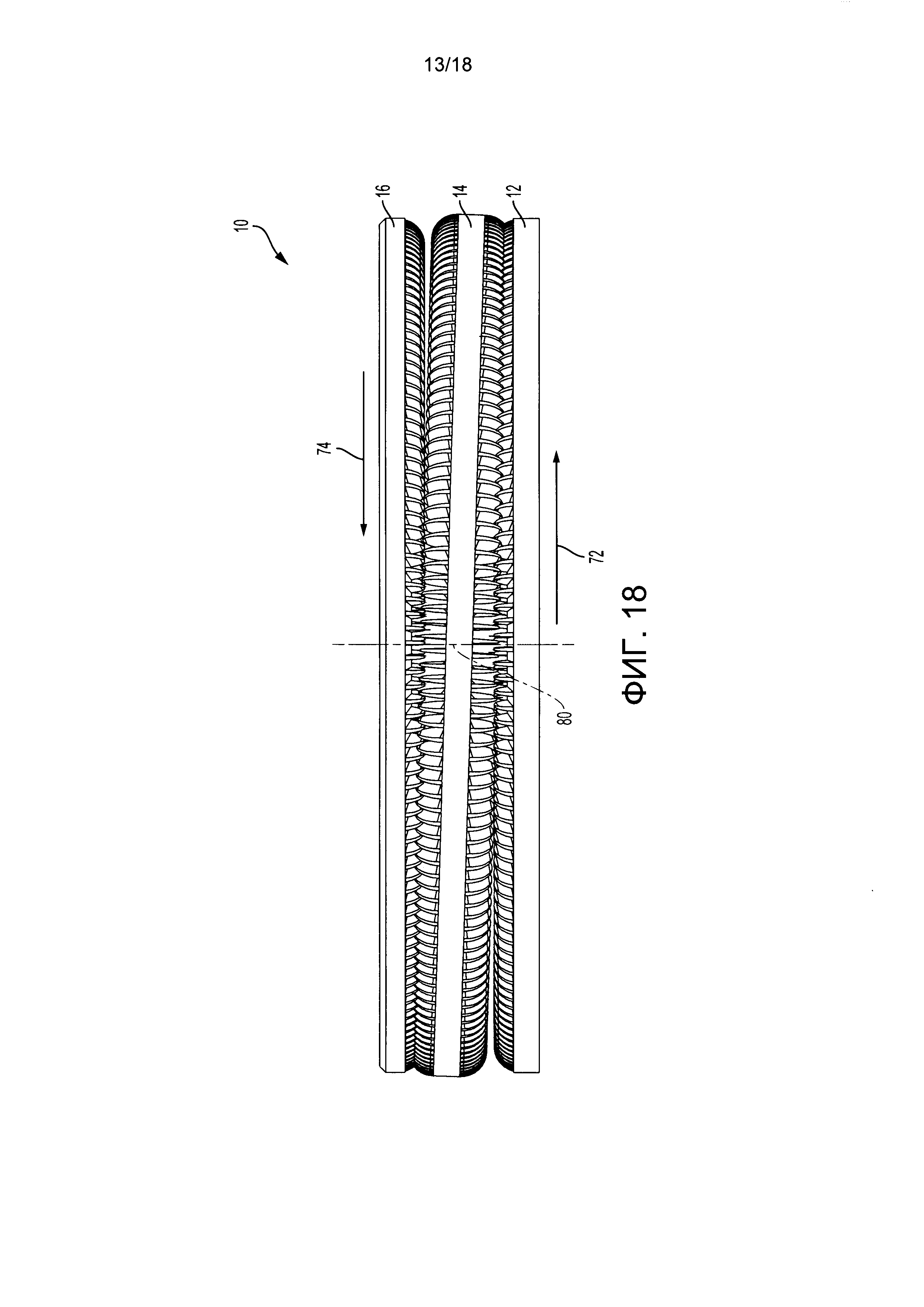
На фиг. 18 схематически показан вид сбоку системы привода по фиг. 1, взятый по направлению D на фиг. 1, показывающий положение, смещенное на 270 градусов, что является тремя четвертями пути вокруг системы привода из нижнего положения.
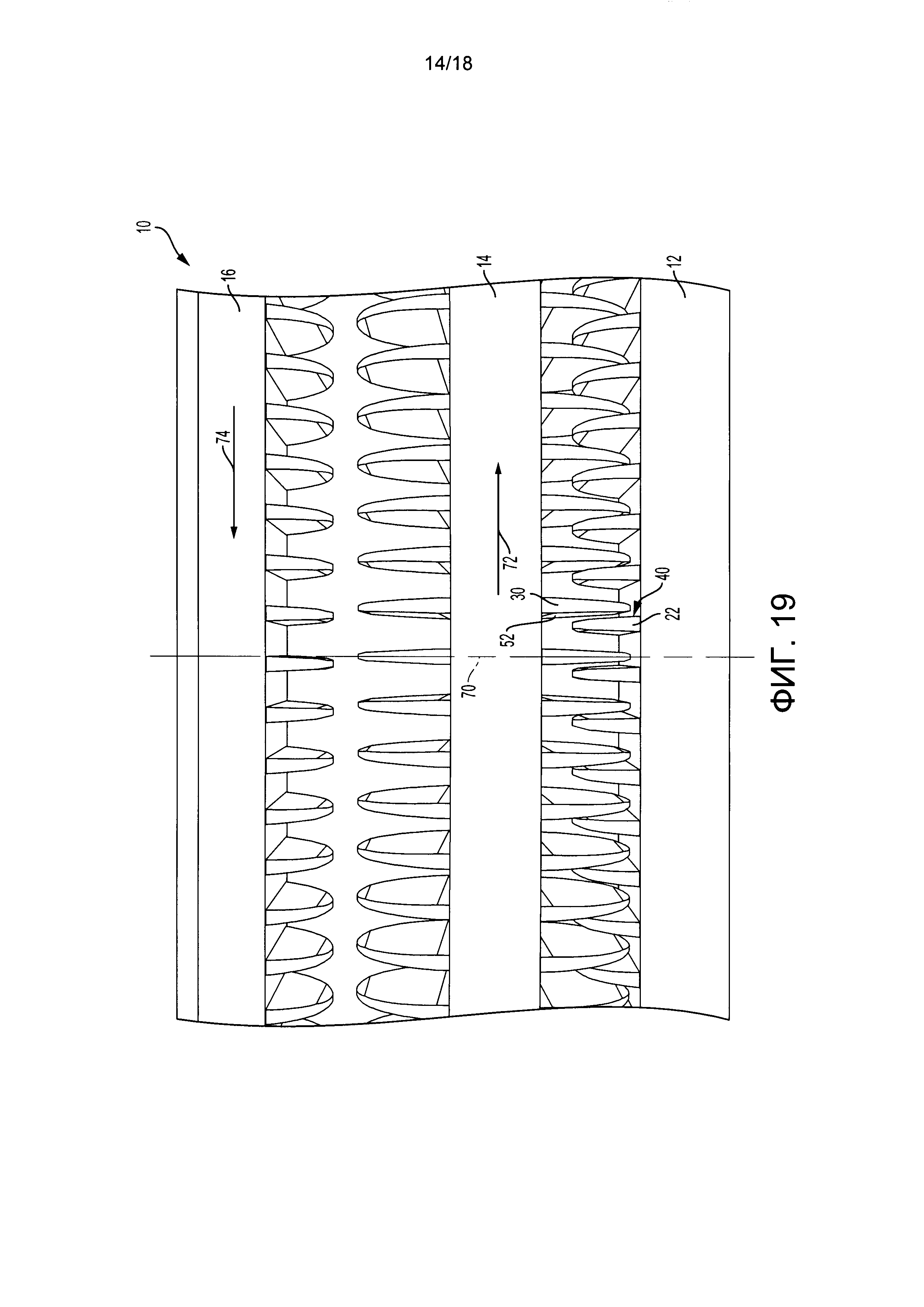
На фиг. 19 схематически показан увеличенный масштаб по фиг. 15, показывающий нижнее положение качающейся шайбы.
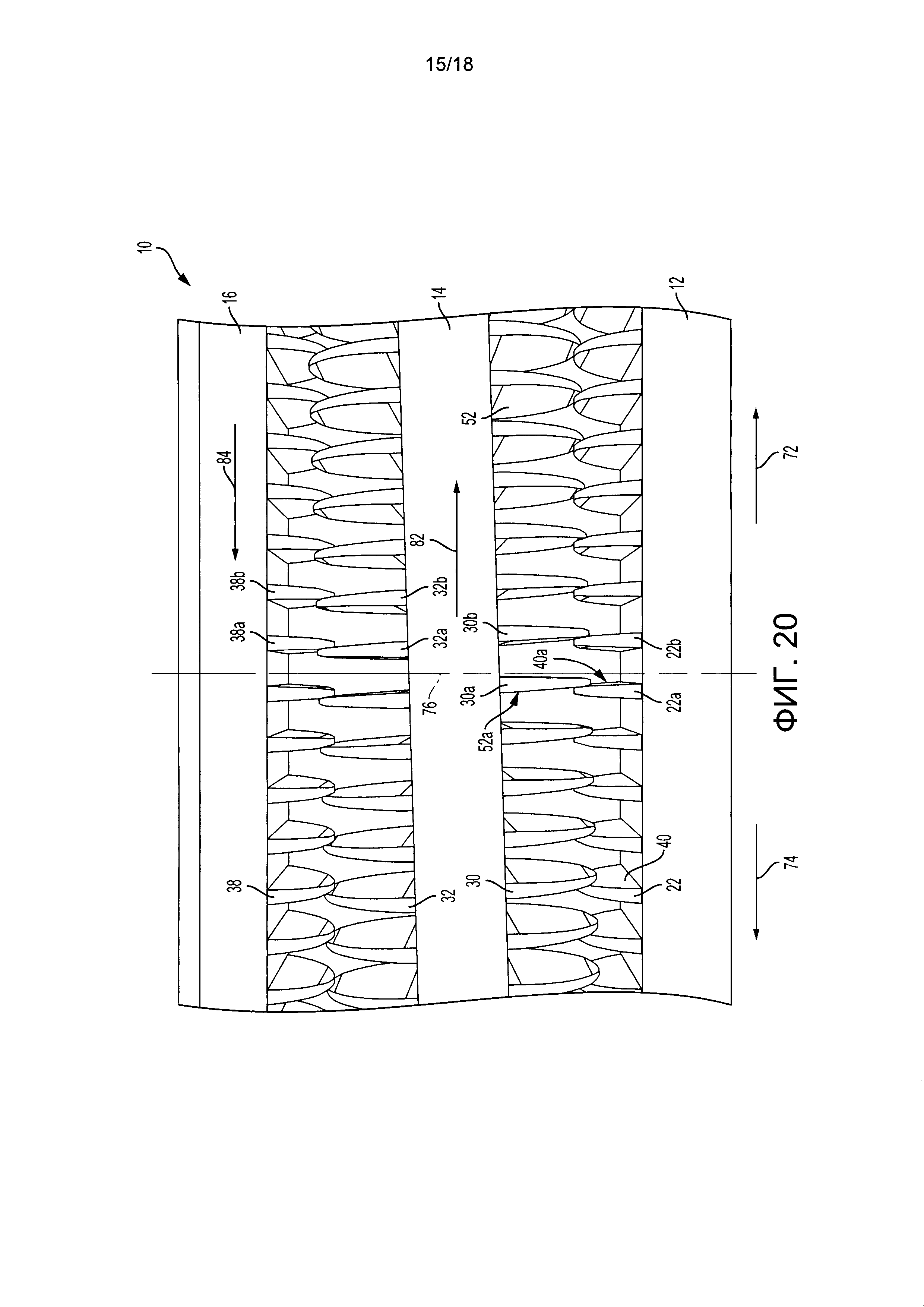
На фиг. 20 схематически показан увеличенный масштаб по фиг. 16, показывающий положение качающейся шайбы, повернутое на 90 градусов, контакт между зубьями статора и нижними зубьями качания и контакт между верхними зубьями качания и выходными зубьями.
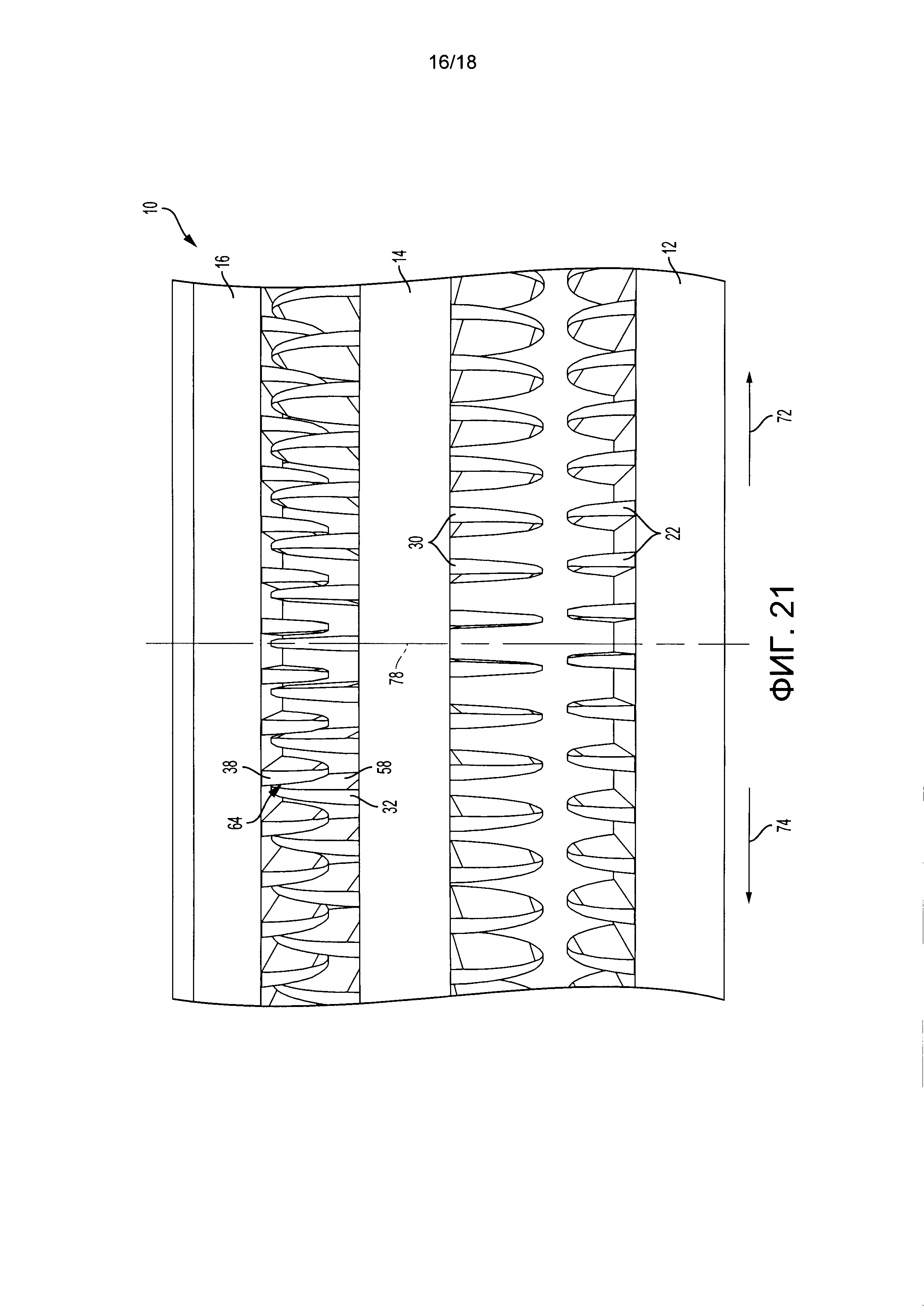
На фиг. 21 схематически показан увеличенный масштаб по фиг. 17, показывающий положение, повернутое на 180 градусов.
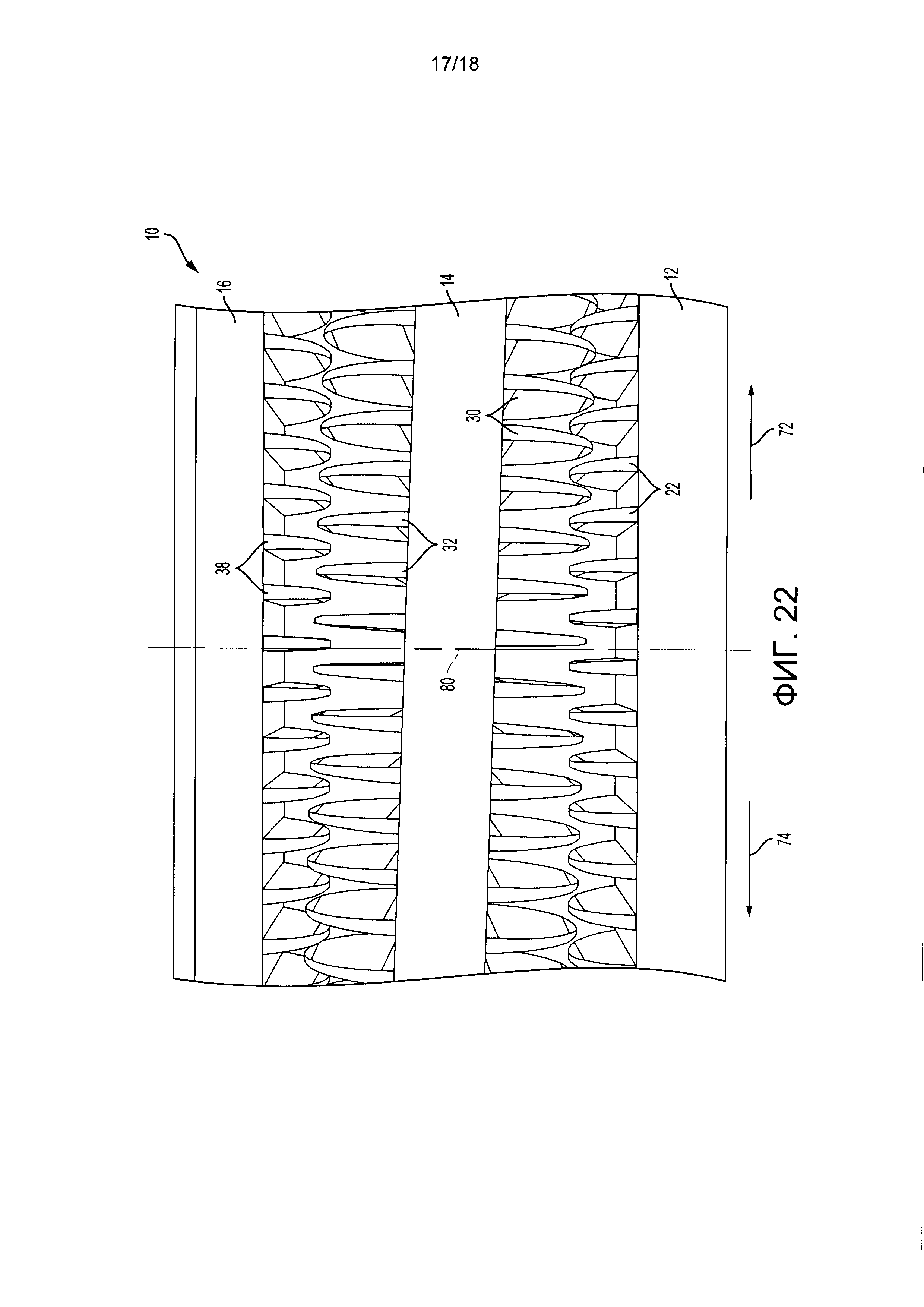
На фиг. 22 схематически показан увеличенный масштаб по фиг. 18, показывающий положение, повернутое на 270 градусов.
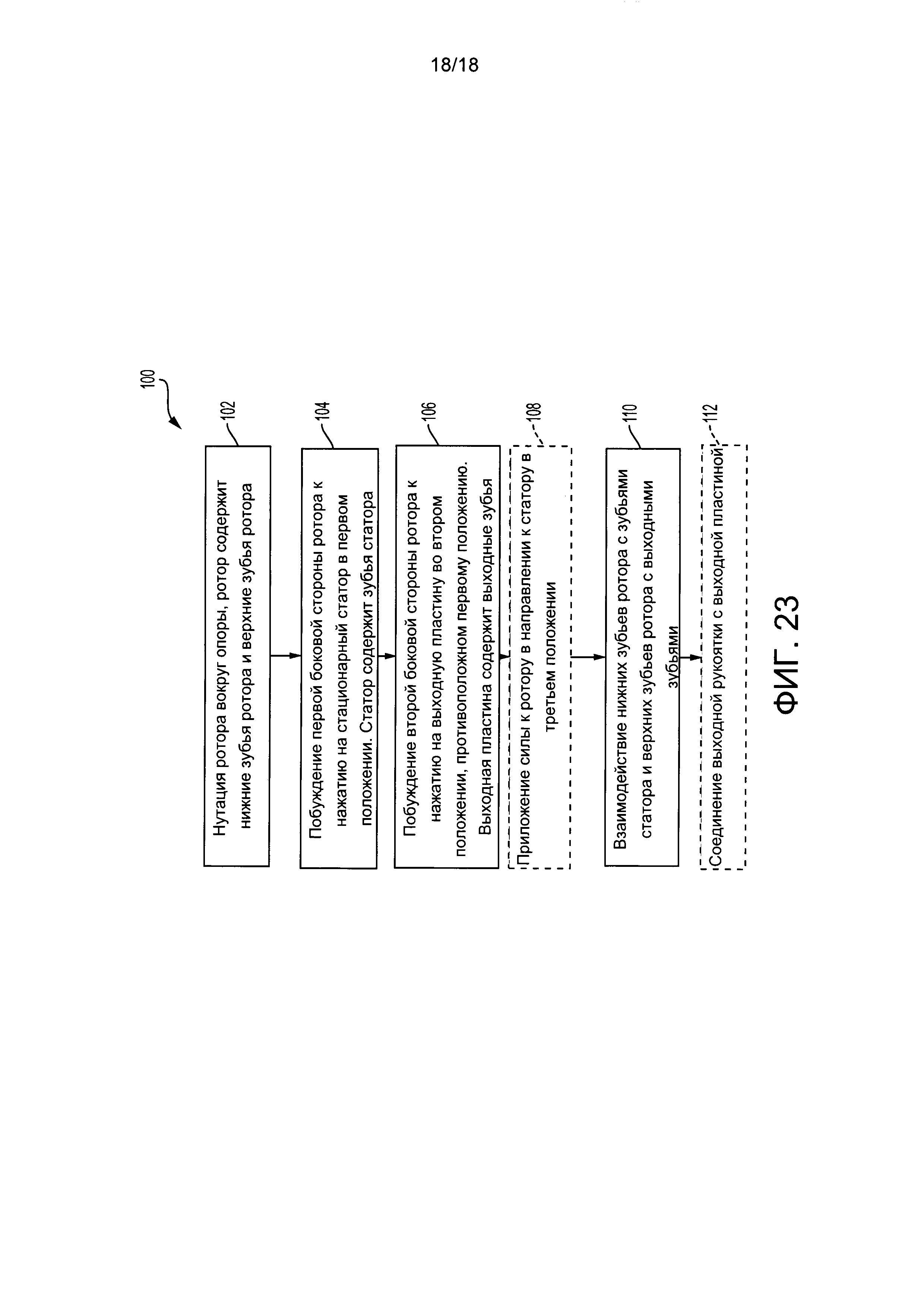
На фиг. 23 схематически показана блок-схема, поясняющая способ работы приводного приспособления с качающейся шайбой.
Раскрытие изобретения
Различные варианты реализации устройств и способов, имеющих отношение к поверхности взаимодействия зубчатых колес с качающейся шайбой, описаны ниже и пояснены на сопутствующих чертежах. Если не определено иначе, то устройство или способ и/или их различные компоненты или этапы могут, но не обязаны, содержать по меньшей мере одну из структур, компонентов, функциональных средств и/или модификаций, описанных, поясняемых и/или включенных здесь. Кроме того, структуры, компоненты, функциональные средства и/или модификации, описанные, поясняемые и/или включенные здесь в связи с устройствами и способами, могут, но не обязаны, быть включены в другие подобные устройства или способы. Последующее описание различных вариантов реализации настоящего изобретения по своей природе представляет собой просто примеры и никоим образом не предназначено для ограничения раскрытия, его приложения или использования. Кроме того, преимущества, обеспечиваемые описанными ниже вариантами реализации изобретения, иллюстративны по своей природе, и не все варианты реализации обеспечивают одинаковые преимущества или одинаковую степень преимуществ.
На фиг. 1 показан изометрический вид взятого в качестве примера варианта реализации системы привода с качающейся шайбой, в целом обозначенной как 10. На фиг. 2 показан изометрический вид системы 10 привода с качающейся шайбой с разнесенными частями. Система 10 привода с качающейся шайбой может содержать статор или зубчатое колесо 12 статора, качающуюся шайбу или зубчатое колесо качания или ротор 14 и выходную пластину или выходное зубчатое колесо 16. На фиг. 2 видно, что статор может иметь центральную ось 18, верхнюю поверхность 20, по существу перпендикулярную центральной оси, и множество зубьев 22 статора, расположенных на верхней поверхности.
Качающаяся шайба 14 может иметь ось 24 качания, расположенную под отличным от нуля углом А1 качания относительно центральной оси. Качающаяся шайба 14 может иметь нижнюю поверхность 26 качания, по существу перпендикулярную оси качания, и верхнюю поверхность 28 качания, по существу перпендикулярную оси качания и противоположную нижней поверхности качания. Множество нижних зубьев 30 качания может быть расположено на нижней поверхности качания, а множество верхних зубьев 32 качания может быть расположено на верхней поверхности качания.
Выходное зубчатое колесо 16 может иметь выходную ось 34, по существу совпадающую с центральной осью 18, и нижнюю поверхность 36, по существу перпендикулярную выходной оси. Множество выходных зубьев 38 может быть расположено на нижней поверхности 36.
Качающаяся шайба 14 может быть выполнена с возможностью нутации вокруг статора 12. Таким образом, ось 24 качания может выполнять прецессию вокруг центральной оси 18 статора таким образом, что угол А1 между этими двумя осями относительно постоянен. При нутации качающейся шайбы первое положение самой низкой точки на нижней поверхности 26 качания может выполнять перемещение по кругу вокруг статора, а второе положение самой высокой точки на верхней поверхности 28 качания может выполнять перемещение по кругу вокруг выходного зубчатого колеса. Качающаяся шайба может быть выполнена с возможностью поворота при ее нутации вокруг статора.
На фиг. 3 показан изометрический вид статора 12. Статор 12 имеет внутренний диаметр D1 и внешний диаметр D2. Статор 12 может быть выполнен в виде кольца, как показано на фиг. 3, или в виде сплошного диска. Между центральной осью 18 и внутренним диаметром D1 статор 12 может иметь любую подходящую структуру. Статор 12 может иметь делительную окружность Р1, расположенную между внутренним и внешним диаметрами. Делительная окружность Р1 может быть расположена посередине между внутренним и внешним диаметрами.
Множество зубьев 22 статора может быть расположено на верхней поверхности 20 между внутренним диаметром D1 и внешним диаметром D2. Количество зубьев указанного множества зубьев статора может быть любым подходящим числом. Во взятом в качестве примера варианте реализации, показанном на фиг. 3, присутствуют 180 зубьев статора. Статор 12 может быть стационарным в контексте использования что любым устройством системы 10 привода с качающейся шайбой.
На фиг. 4 показан подробный вид статора 12, показывающий несколько зубьев 22 статора, расположенных на верхней поверхности 20. Каждый зуб 22 статора может содержать первую ведущую поверхность 40 (см. также фиг. 3). Первая ведущая поверхность 40 может проходить от внутреннего диаметра D1 до внешнего диаметра D2. Первая ведущая поверхность 40 может быть выполнена плоской, составлена более чем из одной плоскости или может быть составлена из одной или большего количества криволинейных поверхностей.
На противоположной от первой ведущей поверхности стороне зуба 22 статора может быть расположена вторая ведущая поверхность 42. Вторая ведущая поверхность 42 может проходить от внутреннего диаметра D1 до внешнего диаметра D2. Вторая ведущая поверхность 42 может быть выполнена плоской, составлена более чем из одной плоскости, или может быть составлена из одной или большего количества криволинейных поверхностей.
Каждый зуб 22 статора может иметь верхнюю поверхность 44 зуба статора, проходящую от первой ведущей поверхности 40 до второй ведущей поверхности 42. Верхняя поверхность 44 зуба статора может определять высоту H1 зуба как расстояние между верхней поверхностью 44 зуба статора и верхней поверхностью 20 статора 12, измеренное вдоль направления, параллельного центральной оси 18 (см. также фиг. 6А).
Высота H1 зуба может иметь максимальное значение между внутренним диаметром D1 и внешним диаметром D2. Высота зуба может иметь максимальное значение на делительной окружности Р1. Высота H1 зуба может иметь минимальное значение на одном из внутреннего диаметра D1 или внешнего диаметра D2. Высота зуба может быть равна нулю на одном или на обоих из внутреннего диаметра D1 и внешнего диаметра D2. Существует много возможных вариантов изменения высоты H1 зуба между внутренним и внешним диаметрами при сохранении все же максимального значения между внутренним и внешним диаметрами и минимального значения или на внутреннем или на внешнем диаметре. Во взятом в качестве примера варианте реализации, показанном на фиг. 4, верхняя поверхность 44 зуба статора определена полукругом. Другие формы, способные определять верхнюю поверхность 44 зуба статора, включают, не ограничиваясь этим, эллипс, треугольник, параболу или любую другую соответствующую кривую, комбинацию кривых, комбинацию прямых линий или комбинацию кривых и прямых линий.
На фиг. 5 показан вид сверху статора 12, показывающий подмножество зубьев 22 статора. Каждый зуб статора способен иметь по существу прямоугольную площадь основания на верхней поверхности 20. Таким образом, первая линия 46, полученная посредством пересечения первой ведущей поверхности 40 с верхней поверхностью 20, может быть параллельна второй линии 48, полученной при пересечении второй ведущей поверхности 42 с верхней поверхностью 20. И первая и вторая линии 46 и 48 могут быть параллельны радиальной линии 50, проходящей от центральной оси 18 (см. фиг. 3). Каждый зуб статора может иметь толщину Т1, то есть линейное расстояние, измеренное между первой и второй ведущими поверхностями 40 и 42. Толщина Т1 каждого зуба 22 статора может быть по существу одинаковой на внутреннем и внешнем диаметрах D1 и D2.
Пара смежных зубьев статора может определять шаг А2 зубьев как угловое разнесение между соответствующими положениями на каждом зубе 22 из пары смежных зубьев статора. Например, шаг А2 зубьев может быть угловым разнесением, измеренным от того положения, где вторая линия 48 пересекает внутренний диаметр D1 на зубе 22, до того же самого пересечения на соседнем зубе. Площадь основания каждого зуба может иметь угловую ширину A3, заданную толщиной Т1, разделенной на половину внутреннего диаметра D1. Угловая ширина A3 площади основания зуба может быть меньше половины шага А2 зубьев.
На фиг. 6А и 6В показаны виды в разрезе, выполненном в плоскости 6-6 по фиг. 5, взятые в качестве примера одного зуба 22 статора. Горизонтальная шкала на фиг. 6А преувеличена для выявления кривизны сторон зуба, а горизонтальная и вертикальная шкалы на фиг. 6В по существу одинаковы.
Во взятом в качестве примера варианте реализации, показанном на фиг. 6А и 6В, первая и вторая ведущие поверхности 40 и 42 могут быть определены составной эвольвентой окружности и эллипса. Таким образом, кривая второй ведущей поверхности 42, показанной на фиг. 6А может быть определена уравнением:

где А представляет собой константу, которая может быть пропорциональна радиусу делительной окружности Р1 и углу А1 качания, угол θ может принимать значения от 0 до (п/2) радиан, a D может быть положительной константой, меньшей 1. Величина D может принимать значение 0,65. Кривая первой ведущей поверхности 40 может быть зеркальным отображением кривой второй ведущей поверхности 42, отраженным от плоскости, которая вертикальна на фиг. 6А и перпендикулярна плоскости фиг. 6А.
Толщина Т1 зуба (см. фиг.5) может быть разделена на три сегмента: толщина Т2 первой поверхности, толщина Т3 второй поверхности и толщина Т4 верхней поверхности зуба статора. Толщина Т2 первой поверхности может быть линейной шириной части площади основания под первой ведущей поверхностью 40. Толщина Т3 второй поверхности может быть линейной шириной части площади основания под второй ведущей поверхностью 42. Толщины Т2 и Т3 могут быть одинаковыми. Толщина Т4 верхней поверхности зуба статора может быть линейной шириной части площади основания под верхней поверхностью 44 зуба статора.
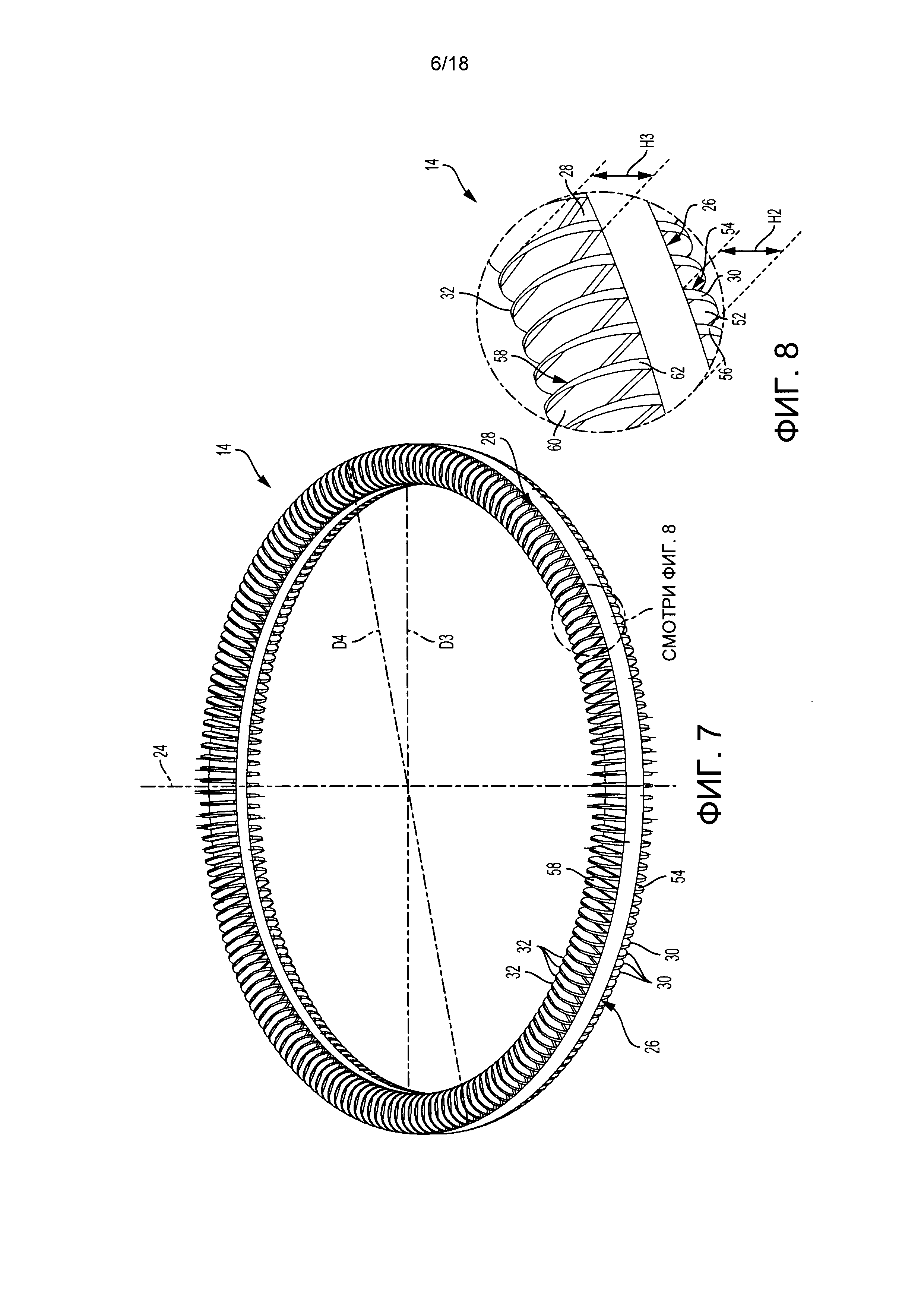
На фиг. 7 показан изометрический вид качающейся шайбы или ротора 14. Качающаяся шайба 14 может быть выполнена в виде кольца, как изображено на фиг. 7, или она может быть выполнена в виде сплошного диска. Качающаяся шайба 14 может иметь любую подходящую структуру, внутреннюю по отношению к множествам верхних и нижних зубьев 32 и 30 качания. Качающаяся шайба 14 может быть функционально связана с опорой (не показана), ближайшей к оси 24 качания (см. фиг. 2). Опора может быть стационарной, какое бы устройство ни содержало систему 10 привода с качающейся шайбой. Качающаяся шайба 14 может быть выполнена с возможностью нутации вокруг статора 12 (см. фиг. 2).
Верхние и нижние зубья (32 и 30) качания могут быть расположены на верхней и нижней поверхностях (28 и 26) качания между внутренним диаметром D3 качания и внешним диаметром D4 качания. Количество нижних зубьев 30 качания может быть любым соответствующим числом. Во взятом в качестве примера варианте реализации настоящего изобретения, показанном на фиг. 7, присутствуют 181 нижний зуб 30 качания. Количество нижних зубьев 30 качания может быть на один больше или на один меньше количества зубьев 22 статора (см. фиг. 2). Количество нижних зубьев 30 качания может быть отлично от количество зубьев 22 статора (см. фиг. 2) на любое число, включая единицу и нуль.
Количество верхних зубьев 32 качания может быть любым подходящим числом. Во взятом в качестве примера варианте реализации настоящего изобретения, показанном на фиг. 7, присутствуют 182 верхних зуба 32 качания. Количество верхних зубьев 32 качания может быть отлично от количества нижних зубьев 30 качания на любое число, включая нуль, единицу или число, больше единицы. Количество верхних зубьев 32 качания может быть больше или меньше количества нижних зубьев 30 качания.
На фиг. 8 показан детализированный вид качающейся шайбы 14, показывающий несколько нижних зубьев 30 качания, расположенных на нижней поверхности 26 качания, и несколько верхних зубьев 32 качания, расположенных на верхней поверхности 28 качания. Каждый нижний зуб 30 качания может иметь первую ведомую поверхность 52, проходящую от внутреннего диаметра D3 качания до внешнего диаметра D4 качания (см. фиг. 7). Первая ведомая поверхность 52 может быть плоской, составленной более чем из одной плоскости, или может быть составлена из одной или большего количества поверхностей с кривизной. Первая ведомая поверхность 52 может быть выполнена с возможностью взаимодействия с первой ведущей поверхностью 40 зуба 22 статора (см. фиг. 4) при нутации качающейся шайбы 14 вокруг статора 12 (см. фиг. 2) в первом направлении нутации.
Каждый нижний зуб 30 качания может иметь вторую ведомую поверхность 54, противоположную первой ведомой поверхности 52. Вторая ведомая поверхность 54 может быть более ясно видна на фиг. 7. Вторая ведомая поверхность 54 может проходить от внутреннего диаметра D3 качания до внешнего диаметра D4 качания. Вторая ведомая поверхность может быть плоской, составленной более чем из одной плоскости, или может быть составлена из одной или большего количества поверхностей с кривизной. Вторая ведомая поверхность 54 может быть выполнена с возможностью взаимодействия со второй ведущей поверхностью 42 зуба 22 статора (см. фиг. 4) при нутации качающейся шайбы 14 вокруг статора 12 (см. фиг. 2) во втором направлении нутации.
Каждый нижний зуб 30 качания может иметь поверхность 56 нижнего зуба качания, проходящую от первой ведомой поверхности 52 до второй ведомой поверхности 54. Поверхность 56 нижнего зуба качания может определять глубину Н2 зуба как расстояние между поверхностью 56 нижнего зуба качания и нижней поверхностью 26 качания качающейся шайбы 14, измеренное вдоль направления, параллельного оси 24 качания (см. фиг. 2). Глубина Н2 зуба может также быть видна на фиг. 10А.
Глубина Н2 зуба может иметь максимальное значение, то есть, больше всего удаленное от нижней поверхности 26 качания, между внутренним и внешним диаметрами D3 и D4 качания. Глубина Н2 зуба может иметь минимальное значение, то есть, ближайшее к нижней поверхности 26 качания, при одном из внутреннего или внешнего диаметров D3 или D4 качания. Поверхность 56 нижнего зуба качания может претерпевать изменение любым подходящим образом от внутреннего диаметра D3 качания к внешнему диаметру D4 качания, включая, но не ограничиваясь этим, вдоль пути, определенного полукругом, эллипсом, треугольником, параболой или любыми другими комбинациями кривых и прямых линий.
Каждый верхний зуб 32 качания может иметь третью ведущую поверхность 58, проходящую от внутреннего диаметра D3 качания к внешнему диаметру D4 качания. Третья ведущая поверхность 58 может быть более ясно видна на фиг. 7. Третья ведущая поверхность 58 может быть плоской, составленной более чем из одной плоскости, или может быть составлена из одной или большего количества поверхностей с кривизной.
Каждый верхний зуб 32 качания может иметь четвертую ведущую поверхность 60, противоположную третьей ведущей поверхности 58 и проходящую от внутреннего диаметра D3 качания к внешнему диаметру D4 качания. Четвертая ведущая поверхность 60 может быть плоской, составленной более чем из одной плоскости, или может быть составлена из одной или большего количества поверхностей с кривизной.
Каждый верхний зуб 32 качания может иметь поверхность 62 верхнего зуба качания, проходящую от третьей ведущей поверхности 58 к четвертой ведущей поверхности 60. Поверхность 62 верхнего зуба качания может определять высоту Н3 зуба как расстояние между поверхностью 62 верхнего зуба качания и верхней поверхностью 28 качания качающейся шайбы 14, измеренное вдоль направления, параллельного оси 24 качания (см. фиг. 2).
Высота Н3 зуба может иметь максимальное значение между внутренним и внешним диаметрами D3 и D4 качания. Высота Н3 зуба может иметь минимальное значение при одном из внутреннего или внешнего диаметров D3 или D4 качания. Поверхность 62 верхнего зуба качания может претерпевать изменение любым подходящим образом от внутреннего диаметра D3 качания к внешнему диаметру D4 качания, включая, но не ограничиваясь этим, вдоль пути, определенного полукругом, эллипсом, треугольником, параболой или любыми другими комбинациями кривых и прямых линий.
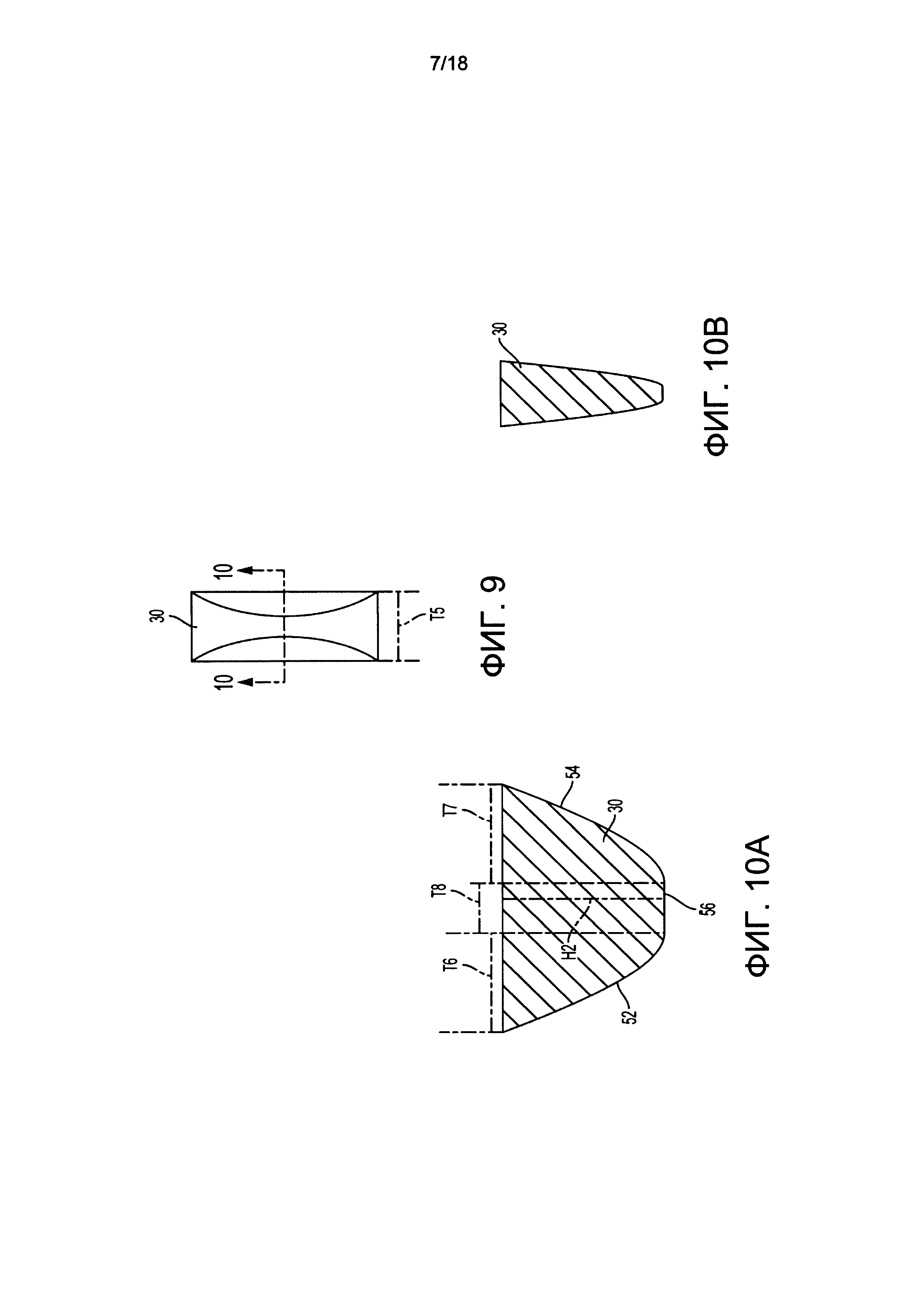
На фиг. 9 показан вид сверху одного нижнего зуба 30 качания. Нижний зуб 30 качания может иметь прямоугольную площадь основания на нижней поверхности 26 качания (см. фиг. 7 и 8) тем же самым образом, как зубья 22 статора могут иметь прямоугольные площади основания, как описано со ссылками на фиг. 5. Линейная толщина Т5 нижнего зуба 30 качания может иметь одно и то же значение на внутреннем диаметре D3 качания и на внешнем диаметре D4 качания (см. фиг. 7).
На фиг. 10А и 10В показаны виды в разрезе (проведенного по линии 10-10 на фиг. 9) взятого в качестве примера нижнего зуба 30 качания. Как и на фиг. 6А и 6В, горизонтальная шкала на фиг. 10А была преувеличена для выявления кривизны первой и второй ведомых поверхностей 52 и 54.
Во взятом в качестве примера варианте реализации настоящего изобретения, показанном на фиг. 10А и 10В, первая и вторая ведомые поверхности 52 и 54 могут быть определены составной эвольвентой окружности и эллипса, как описано со ссылками на фиг. 6А и 6В. Таким образом, кривая первой ведомой поверхности 52, показанной на фиг. 10А, может быть согласована с кривой первой ведущей поверхности 40 на фиг. 6А. Первая ведомая поверхность 52 может быть дополнительной к первой ведущей поверхности 40. Первые ведомые и ведущие поверхности 52 и 40 могут быть дополнительными независимо от конкретной формы кривой первой ведущей поверхности 40.
Кривая второй ведомой поверхности 54, показанная на фиг. 10А, может быть согласована с кривой второй ведущей поверхности 42 на фиг. 6А. Таким образом, вторая ведомая поверхность 54 может быть дополнительной ко второй ведущей поверхности 42. Вторые ведомые и ведущие поверхности 54 и 42 могут дополнять друг друга независимо от конкретной формы кривой второй ведущей поверхности.
Толщина Т5 нижнего зуба 30 качания (см. фиг. 9) может быть разделена на три сегмента, включая толщину Т6 первой ведомой поверхности, толщину Т7 второй ведомой поверхности и толщину Т8 поверхности нижнего зуба качания. Толщина Тб первой ведомой поверхности может быть линейной шириной части площади основания под первой ведомой поверхностью 52. Толщина Т7 второй ведомой поверхности может быть линейной шириной части площади основания под второй ведомой поверхностью 54. Толщины Т6 и Т7 могут быть одинаковыми. Толщина Т8 поверхности нижнего зуба качания может быть линейной шириной части площади основания под нижней поверхностью зуба 56 качания. Толщина Т6 первой ведомой поверхности может быть равна толщине Т2 первой поверхности (см. фиг. 6А). Толщина Т7 второй ведомой поверхности может быть равна толщине Т3 второй поверхности (см. фиг. 6А).
Со ссылками снова на фиг.7 и 8 можно видеть, что множество верхних зубьев 32 качания может иметь по существу ту же самую форму, что и множество нижних зубьев 30 качания. Таким образом, каждый из верхних зубьев 32 качания может иметь прямоугольную площадь основания на верхней поверхности 28 качания, как показано на фиг. 9 для нижнего зуба 30 качания на нижней поверхности 26 качания. Форма поперечного сечения верхнего зуба 32 качания может представлять собой отражение формы поперечного сечения нижнего зуба 30 качания на фиг. 10А и 10В от плоскости, определенной самой качающейся шайбой 14. Иными словами, верхние и нижние зубья 32 и 30 качания могут иметь одинаковое поперечное сечение, причем нижние зубья 30 качания проходят вниз от нижней поверхности 26 качания к статору 12 (см. фиг. 2), а верхние зубья 32 качания проходят вверх от верхней поверхности 28 качания к выходному зубчатому колесу 16 (см. фиг. 2).
Каждый из верхних зубьев 32 качания может иметь по меньшей мере одну поверхность, определенную составной эвольвентой окружности и эллипса, как обсуждено со ссылками на фиг. 6А и 6В. Третья и четвертая ведущие поверхности 58 и 60 верхнего зуба 32 качания могут быть определены составной эвольвентой окружности и эллипса.
Толщина верхних зубьев 32 качания может быть отличной от толщины нижних зубьев 30 качания при различных количествах верхних и нижних зубьев 32 и 30 качания. Например, если есть 181 нижний зуб 30 качания и 182 верхних зуба 32 качания, то верхние зубья 32 качания могут быть более тонкими, чем нижние зубья 30 качания с коэффициентом 181/182.
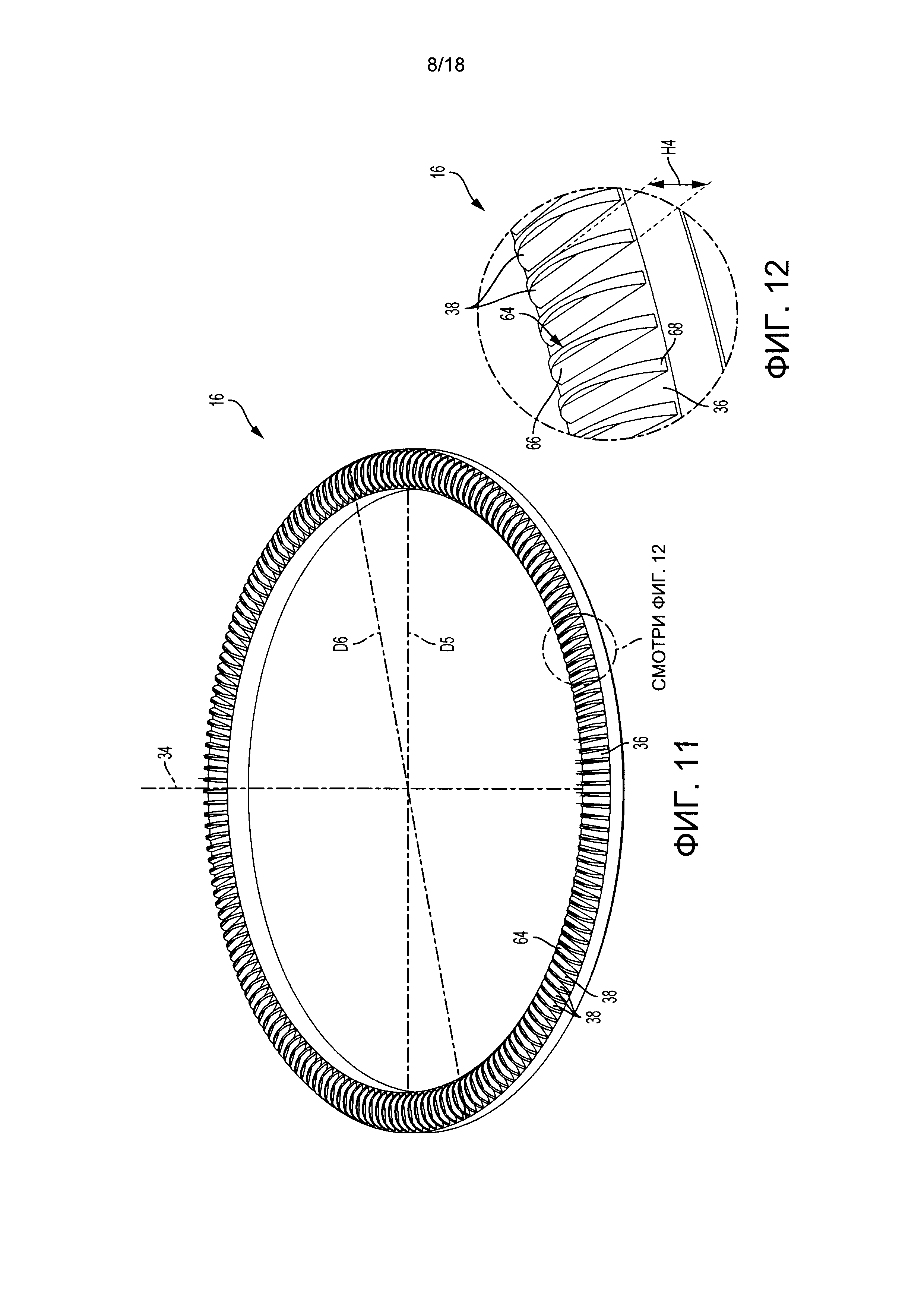
На фиг. 11 показан изометрический вид выходного зубчатого колеса 16. Для ясности выходное зубчатое колесо 16 на фиг. 11 представлено «перевернутым» относительно его ориентации на фиг. 1 и 2. Выходное зубчатое колесо 16 может иметь внутренний выходной диаметр D5 и внешний выходной диаметр D6. Между выходной осью 34 и внутренним выходным диаметром D5 выходного зубчатого колеса 16 может быть размещена любая подходящая структура.
Множество выходных зубьев 38 может быть расположено на нижней поверхности 36 между внутренним выходным диаметром D5 и внешним выходным диаметром D6. Количество выходных зубьев в этом множестве может быть любым подходящим числом. Во взятом в качестве примера варианте реализации настоящего изобретения, изображенном на фиг. 11, есть 181 выходной зуб. Выходное зубчатое колесо 16 может выполнять свободный поворот вокруг выходной оси 34, какое бы устройство ни использовало систему привода 10 с качающейся шайбой. Выходное зубчатое колесо 16 может быть соединено с выходным валом или выходной ручкой.
На фиг. 12 показан детальный вид выходного зубчатого колеса 16, показывающий множество выходных зубьев 38, расположенных на нижней поверхности 36. Каждый выходной зуб 38 может содержать третью ведомую поверхность 64. Третья ведомая поверхность 64 может быть более ясно видна на фиг. 11. Третья ведомая поверхность 64 может проходить от внутреннего выходного диаметра D5 до внешнего выходного диаметра D6. Третья ведомая поверхность 64 может быть плоской, составлена более чем из одной плоскости, или может быть составлена из одной или большего количества поверхностей с кривизной. Третья ведомая поверхность 64 может быть выполнена с возможностью взаимодействия с третьей ведущей поверхностью 58 верхнего зуба 32 качания при нутации качающейся шайбы 14 (см. фиг. 7 и 8) вокруг выходного зубчатого колеса 16 в первом направлении нутации.
На противоположной от третьей ведомой поверхности 64 стороне выходного зуба 38 может быть расположена четвертая ведомая поверхность 66. Четвертая ведомая поверхность 66 может быть вытянута от внутреннего выходного диаметра D5 до внешнего выходного диаметра D6. Четвертая ведомая поверхность 66 может быть плоской, составлена больше чем из одной плоскости или может быть составлена из одной или большего количества поверхностей с кривизной. Четвертая ведомая поверхность 66 может быть выполнена с возможностью взаимодействия с четвертой ведущей поверхностью 60 (см. фиг. 8) верхнего зуба 32 качания при нутации качающейся шайбы 14 (см. фиг. 7 и 8) вокруг выходного зубчатого колеса 16 во втором направлении нутации.
Каждый выходной зуб 38 может иметь поверхность 68 нижнего выходного зуба, проходящую от третьей ведомой поверхности 64 к четвертой ведомой поверхности 66. Поверхность 68 нижнего выходного зуба может определять глубину Н4 выходного зуба как расстояние между поверхностью 68 нижнего выходного зуба и нижней поверхностью 36, измеренное вдоль направления, параллельного выходной оси 34 (см. фиг. 11).
Глубина Н4 выходного зуба может иметь максимальное значение, то есть, поверхность 68 нижнего выходного зуба может быть удалена от нижней поверхности 36, между внутренним и внешним выходными диаметрами D5 и D6. Глубина Н4 выходного зуба может иметь минимальное значение, то есть, поверхность 68 нижнего выходного зуба может быть самой близкой к нижней поверхности 36 при одном из внутреннего или внешнего выходных диаметров D5 или D6. Поверхность 68 нижнего выходного зуба может претерпевать изменение любым подходящим образом от внутреннего диаметра D5 качания к внешнему диаметру D6 качания, включая, но не ограничиваясь этим, вдоль пути, определенным полукругом, эллипсом, треугольником, параболой или любыми другими комбинациями кривых и прямых линий.
На фиг. 13 показан вид снизу одного выходного зуба 38. Выходной зуб 38 может иметь прямоугольную площадь основания на нижней поверхности 36 (см. фиг. 11 и 12) тем же самым образом, как зубья 22 статора могут иметь прямоугольные площади основания, как описано со ссылками на фиг. 5. Линейная толщина Т9 выходного зуба 38 может иметь значение при внутреннем выходном диаметре D5, совпадающее со значением при внешнем выходном диаметре D6 (см. фиг. 11).
На фиг. 14А и 14В показаны виды в разрезе (вдоль линии 14-14 на фиг. 13) взятого в качестве примера выходного зуба 38, обращенные вниз, как выходные зубья 38, показанные на фиг. 1 и 2. Как и в случае фиг. 6А и 6В, горизонтальная шкала фиг. 14А была преувеличена для выявления кривизны третьей и четвертой ведомых поверхностей 64 и 66.
Во взятом в качестве примера варианте реализации настоящего изобретения, показанном на фиг. 14А и 14В, третья и четвертая ведомые поверхности 64 и 66 могут быть определены составной эвольвентой окружности и эллипса, как описано со ссылками на фиг. 6А и 6В. Таким образом, кривая третьей ведомой поверхности 64, показанной на фиг. 14А, может быть согласована с кривой третьей ведущей поверхности 58 (см. фиг. 7 и 8). Третья ведомая поверхность 64 может быть дополнительной к третьей ведущей поверхности 58. Третьи ведомая и ведущая поверхности 64 и 58 могут дополнять друг друга независимо от конкретной формы кривой третьей ведущей поверхности 58.
Кривая четвертой ведомой поверхности 66, показанной на фиг. 14А, может быть согласована с кривой четвертой ведущей поверхности 60 (см. фиг. 8). Таким образом, четвертая ведомая поверхность 66 может быть дополнительной к четвертой ведущей поверхности 60. Четвертые ведомая и ведущая поверхности 66 и 60 могут дополнять друг друга независимо от конкретной формы кривой четвертой ведущей поверхности 60.
Толщина Т9 (см. фиг. 13) выходного зуба 38 может быть разделена на три сегмента, включая толщину Т10 третьей ведомой поверхности, толщину Т11 четвертой ведомой поверхности и толщину Т12 поверхности нижнего выходного зуба. Толщина Т10 третьей ведомой поверхности может быть линейной шириной части площади основания под третьей ведомой поверхностью 64. Толщина Т11 четвертой ведомой поверхности может быть линейной шириной части площади основания под четвертой ведомой поверхностью 66. Толщины Т10 и Т11 могут быть одинаковыми. Толщина Т12 поверхности нижнего выходного зуба может быть линейной шириной части площади основания под поверхностью 68 нижнего выходного зуба. Толщина Т10 третьей ведомой поверхности может совпадать с толщиной третьей ведущей поверхности 58 (см. фиг. 7 и 8). Толщина Т11 четвертой ведомой поверхности может совпадать с толщиной четвертой ведущей поверхности 60 (см. фиг. 8).
На фиг. 15 показан вид сбоку системы 10 привода с качающейся шайбой, взятый по направлению А на фиг. 1. Качающаяся шайба 14 может иметь нижнее положение 70, где качающаяся шайба 14 наиболее близка к статору 12. Система 10 привода с качающейся шайбой может быть выполнена с возможностью нутации качающейся шайбы 14 вокруг статора 12 и выходного зубчатого колеса 16 в первом направлении нутации, обозначенном стрелкой 72.
При выполнении нутации качающейся шайбой 14 в первом направлении нутации нижнее положение 70 может выполнять перемещение в направлении 72, то есть, направо на фиг. 15. Система 10 привода с качающейся шайбой может быть выполнена с возможностью нутации качающейся шайбы 14 вокруг статора 12 и выходного зубчатого колеса 16 во втором направлении нутации, обозначенном стрелкой 74. При выполнении качающейся шайбой 14 нутации во втором направлении нутации нижнее положение 70 качающейся шайбы 14 может выполнять перемещение в направлении 74.
На фиг. 16 показан вид сбоку системы 10 привода с качающейся шайбой, взятый по направлению В на фиг. 1. Качающаяся шайба 14 может иметь положение 76, смещенное на 90 градусов от нижнего положения 70 (см. фиг. 15) в первом направлении 72 нутации. Таким образом, положение 76 (смещение на 90 градусов) может быть на одной четверти пути вокруг качающейся шайбы 14 от нижнего положения 70 в направлении, обозначенном стрелкой 72.
При выполнении качающейся шайбой 14 нутации в первом направлении нутации, положение 76 (смещение на 90 градусов) может выполнять перемещение в направлении 72. Между нижним положением 70 (см. фиг. 15) и положением 76 (смещением на 90 градусов) подмножество множества нижних зубьев 30 качания может вступить в контакт с подмножеством множества зубьев 22 статора. Этот контакт может быть виден более ясно на фиг. 19 и 20, описанных ниже. Между нижним положением 70 и положением 76 (смещением на 90 градусов) не может быть никаких верхних зубьев 32 качания, контактирующих с какими-либо выходными зубьями 38 (см. фиг. 19 и 20).
На фиг. 17 показан вид сбоку системы 10 привода с качающейся шайбой, взятый по направлению С на фиг. 1. Качающаяся шайба 14 может иметь положение 78, смещенное на 180 градусов от нижнего положения 70 (см. фиг. 15) в первом направлении 72 нутации. Таким образом, положение 78 (смещение на 180 градусов) может быть на противоположной от нижнего положения 70 стороне качающейся шайбы 14.
При выполнении качающейся шайбой 14 нутации в первом направлении нутации положение 78 (смещение на 180 градусов) может выполнять перемещение в направлении 72. Между положением 76 (смещением на 90 градусов) (см. фиг. 16) и положением 78 (смещением на 180 градусов) подмножество множества верхних зубьев 32 качания может вступить в контакт с подмножеством множества выходных зубьев 38. Этот контакт может быть виден более ясно на фиг. 20 и 21, описанных ниже. Между положением 76 (смещением на 90 градусов) и положением 78 (смещением на 180 градусов) не может быть по существу никакого контакта между множеством нижних зубьев 30 качания и множеством зубьев 22 статора (см. фиг. 20 и 21).
На фиг. 18 показан вид сбоку системы 10 привода с качающейся шайбой, взятый по направлению D на фиг. 1. Качающаяся шайба 14 может иметь положение 80, смещенное на 270 градусов от нижнего положения 70 (см. фиг. 15) в первом направлении 72 нутации. Таким образом, положение 80 (смещение на 270 градусов) может быть на противоположной от положения 76 (смещения на 90 градусов) стороне качающейся шайбы 14 (см. фиг. 16).
При выполнении качающейся шайбой 14 нутации в первом направлении нутации положение 80 (смещение на 270 градусов) может выполнять перемещение в направлении 72. Между положением 78 (смещением на180 градусов) (см. фиг. 17) и положением 80 (смещением на 270 градусов) не может быть по существу никакого контакта между нижними зубьями 30 качания и зубьями 22 статора (см. фиг. 21 и 22). Между положением 78 (смещением на 180 градусов) и положением 80 (смещением на 270 градусов) не может быть по существу никакого контакта между верхними зубьями 32 качания и выходными зубьями 38 (см. фиг. 21 и 22).
Между положением 80 (смещением на 270 градусов) и нижним положением 70 (см. фиг. 15) не может быть по существу никакого контакта между нижними зубьями 30 качания и зубьями 22 статора (см. фиг. 22). Между положением 80 (смещением на 270 градусов) и нижним положением 70 не может быть по существу никакого контакта между верхними зубьями 32 качания и выходными зубьями 38 (см. фиг. 22).
На фиг. 19 показан в увеличенном масштабе вид по фиг. 15, иллюстрирующий нижнее положение 70 качающейся шайбы 14. Как описано со ссылками на фиг. 16, подмножество зубьев 22 статора может вступить в контакт или взаимодействовать с подмножеством нижних зубьев 30 качания между нижним положением 70 и положением 76 (смещением на 90 градусов) (см. фиг. 19), причем положение 76 (смещение на 90 градусов) находится в направлении 72 от нижнего положения 70. Контакт между зубьями 22 статора и нижними зубьями 30 качания может быть выполнен между первой ведущей поверхностью 40 зуба 22 статора и первой ведомой поверхностью 52 нижнего зуба 30 качания.
На фиг. 20 показан в увеличенном масштабе вид по фиг. 16, иллюстрирующий положение 76 (смещение на 90 градусов) качающейся шайбы 14. При нутации качающейся шайбы в первом направлении 72 нутации подмножество нижних зубьев 30 качания может вступить в контакт с подмножеством зубьев 22 статора между положением 76 (смещением на 90 градусов) и нижним положением 70 (см. фиг. 19). Например, нижний зуб 30 качания на фиг. 20 может вступить в контакт с зубом 22а статора во время нутации качающейся шайбы 14. Этот контакт может сначала происходить при нахождении нижнего зуба качания 30а вблизи положения 76 (смещения на 90 градусов) и может быть прекращен при нахождении нижнего зуба качания 30а вблизи нижнего положения 70 (см. фиг. 19). Первый контакт между нижним зубом качания 30а и зубом 22а статора может иметь место в любом положении между положением 76 (смещением на 90 градусов) и нижним положением 70 (см. фиг. 19), и может быть прекращен в любом положении между нижним положением 70 и точкой первого контакта.
При выполнении зубом качания нутации в направлении 72 нижний зуб 30а качания может иметь скользящий контакт с зубом 22а статора. Таким образом, первая ведомая поверхность 52а нижнего зуба 30а качания может скользить вниз по первой ведущей поверхности 40а зуба 22а статора. При нутации качающейся шайбы в первом направлении 72 нутации контактные силы, воздействующие на первые ведомые поверхности 52 множества нижних зубьев 30 качания со стороны первых ведущих поверхностей 40 множества зубьев 22 статора, могут быть направлены по существу вдоль стрелки 72 направления. Эти силы могут вынудить качающуюся шайбу 14 к повороту в направлении 82 относительно статора 12.
Первое направление 72 нутации может быть взято в виде направления, касательного к делительной окружности Р1, показанной на фиг. 3. Таким образом, контактные силы, воздействующие на первые ведомые поверхности 52 множества нижних зубьев 30 качания со стороны первых ведущих поверхностей 40 множества зубьев 22 статора, могут быть направлены по существу параллельно направлению, касательному к делительной окружности P1. Направление контактных сил может быть следствием соответствующих форм нижних зубьев 30 качания и зубьев 22 статора.
При контактных силах, действующих вместо этого в направлении, отличном от касательной к делительной окружности P1, эти нетангенциальные силы способны вызвать эксцентрическое движение в системе 10 привода с качающейся шайбой. Например, при действии нетангенциальных контактных сил в направлении от статора к качающейся шайбе такие силы способны вызывать выход из взаимодействия между нижними зубьями 30 качания и зубьями 22 статора. В другом примере, при действии нетангенциальных контактных сил в радиальном направлении от центральной оси 18 (см. фиг. 2) или к ней такие силы способны вызывать некруговое или эксцентрическое перемещение ротора 14, что может привести к нежелательным вибрациям.
Во взятом в качестве примера варианте реализации, показанном на фиг. 20, статор 12 содержит 180 зубьев статора, качающаяся шайба 14 содержит 181 нижний зуб 30 качания и 182 верхних зуба 32 качания, а выходная пластина 16 содержит 181 выходной зуб. Однако, любые подходящие числа могут быть выбраны для количества зубьев в различных множествах зубьев.
Во время нутации нижний зуб 30а качания может контактировать с зубом 22а статора, нижний зуб 30b качания может контактировать с зубом 22b статора и т.д. Кроме того, верхний зуб 32а качания может контактировать с выходным зубом 38а, верхний зуб 32b качания может контактировать с выходным зубом 38b и т.д. В случае превышения на единицу количества нижних зубьев по сравнению с количеством зубьев статора при следующей нутации зуб 30а может войти во взаимодействие с зубом 22b статора и т.д. Таким образом, после одной нутации нижний зуб 30а качания может быть в текущем положении нижнего зуба 30b качания. Во время одной нутации качающаяся шайба 14 может выполнить перемещение в первом направлении 72 нутации примерно на 1,99 градуса, то есть, на 360 градусов, разделенных на 181 зуб.
Во время той же самой нутации верхние зубья 32 качания могут выполнить перемещение в направлении 72 на тот же угол, что и нижние зубья 30 качания, а именно, примерно на 1,99 градуса, поскольку качающаяся шайба 14 и соответствующие верхние и нижние зубья 32 и 30 качания образуют жесткий объект. Однако, угловое разнесение между соседними верхними зубьями 32 качания, например, между верхними зубьями 32а и 32b качания, может примерно составлять 1,98 градуса, то есть, 360 градусов, разделенных на 182 зуба. Таким образом, после одной нутации верхний зуб 32а качания может быть расположен на 0,01 градуса дальше направо по сравнению с текущим положением верхнего зуба 32b качания. Таким образом, верхний зуб 32b качания может в настоящее время быть на 1,98 градуса дальше от верхнего зуба 32а качания, но после одной нутации верхний зуб 32а качания способен выполнить продвижение в направлении 72 на 1,99 градуса.
Верхний зуб 32b качания изображен в контакте с выходным зубом 38b во время нутации, показанной на фиг. 20. В случае наличия 182 верхних зубьев качания и 181 выходного зуба во время следующей нутации верхний зуб 32а качания может контактировать с выходным зубом 38b. Таким образом, выходное зубчатое колесо 16 может выполнять перемещение в направлении 84 относительно качающейся шайбы 14.
Во время нутации, показанной на фиг. 20, выходной зуб 38b вступает в контакт с верхним зубом 32b качания. Во время следующей нутации выходной зуб 38b может вступать в контакт с верхним зубом 32а качания, который может быть размещен на 0,01 градуса дальше направо по сравнению с текущим положением верхнего зуба 32b качания. Таким образом, во время одной полной нутации качающейся шайбы 14 выходной зуб 38b и, следовательно, сама выходная пластина 16 способны выполнить перемещение на 0,01 градуса вдоль направления 72.
Передаточное отношение может быть вычислено посредством разделения 360 градусов на угловое смещение выходного зубчатого колеса 16 во время одной полной нутации. Для взятого в качестве примера варианта реализации настоящего изобретения, показанного на фиг. 20, это передаточное отношение, как можно видеть, равно произведению количества верхних и нижних зубьев 32 и 30 качания. При количестве верхних и нижних зубьев, равном 182 и 181, соответственно, передаточное отношение равно примерно 33000. Другими словами, может быть необходимо примерно 33000 нутаций качающейся шайбы 14 для выполнения одного полного поворота выходного зубчатого колеса 16.
На фиг. 21 показан в увеличенном масштабе вид по фиг. 16, иллюстрирующий положение 78 (смещенное на 180 градусов) качающейся шайбы 14. Как описано со ссылками на фиг.17, подмножество верхних зубьев 32 качания может контактировать, или вступать во взаимодействие, с подмножеством выходных зубьев 38 между положением 76 (смещением на 90 градусов) (см. фиг. 20), и положением 78 (смещением на 180 градусов). При выполнении нутации качающейся шайбой 14 контакт между выходными зубьями 38 и верхними зубьями 32 качания может быть скользящим контактом. Контакт между верхним зубом 32 качания и выходным зубом 38 может происходить между третьей ведущей поверхностью 58 верхнего зуба 32 качания и третьей ведомой поверхностью 64 выходного зуба 38.
Во время нутации качающейся шайбы 14 первый контакт между верхним зубом 32 качания и выходным зубом 38 может происходить, когда верхний зуб 32 качания наиболее близок к положению 78 (смещению на 180 градусов). Этот контакт может быть прекращен, когда верхний зуб 32 качания наиболее близок к положению 76 (смещению на 90 градусов) (см. фиг. 20). Первый контакт между верхним зубом 32 качания и выходным зубом 38 может быть в любом положении между положением 78 (смещением на 180 градусов) и положением 76 (смещением на 90 градусов). Последний контакт между верхним зубом 32 качания может быть в любом положении между положением первого контакта и положением 76 (смещением на 90 градусов).
На фиг. 22 показан в увеличенном масштабе вид по фиг. 18, иллюстрирующий положение 80 (смещение на 270 градусов) качающейся шайбы 14. В положении 80 (при смещении на 270 градусов) по существу не может быть никакого контакта ни между верхними зубьями 32 качания и выходными зубьями 38, ни между нижними зубьями 30 качания и зубьями 22 статора при выполнении качающейся шайбой 14 нутации в первом направлении 72 нутации. Не может быть по существу никакого контакта между любым из зубьев в любом положении между положением 78 (смещением на 180 градусов) (см. фиг. 21) и нижним положением 70 (см. фиг. 19) вдоль направления 72.
Фиг. 16-22 обсуждены выше в связи с качающейся шайбой 14, выполняющей нутацию в первом направлении 72 нутации. Качающаяся шайба 14 может также выполнять нутацию во втором направлении 74 нутации, как показано и обсуждено со ссылками на фиг. 15. При выполнении качающейся шайбой 14 нутации во втором направлении 74 нижнее положение 70 может выполнять перемещение налево, как показано на фиг. 15, то есть, в направлении 74. Положение 76 (смещение на 90 градусов) может быть на одной четверти пути вокруг качающейся шайбы 14 в направлении 74. Положение 78 (смещение на 180 градусов) может быть на противоположной относительно нижнего положения 70 стороне качающейся шайбы 14. Положение 80 (смещение на 270 градусов) может быть расположено в трех четвертях пути вокруг качающейся шайбы 14 в направлении 74.
При выполнении качающейся шайбой 14 нутации во втором направлении 74 нутации вторые ведущие поверхности 42 зубьев 22 статора (см. фиг. 4) способны вступать во взаимодействие со вторыми ведомыми поверхностями 54 нижних зубьев 30 качания (см. фиг. 7 и 8). При выполнении качающейся шайбой 14 нутации во втором направлении 74 нутации четвертые ведущие поверхности 60 верхних зубьев 32 качания (см. фиг. 8) способны вступать во взаимодействие с четвертыми ведомыми поверхностями 66 выходных зубьев 38 (см. фиг. 12). Эти взаимодействия зубьев способны заставить выходное зубчатое колесо 16 выполнять поворот в направлении 74 относительно стационарного статора 12, аналогично нутации в первом направлении 72 нутации, рассмотренной со ссылками на фиг. 20.
На фиг. 23 показано множество этапов способа, в целом обозначенного как 100, работы приводного приспособления с качающейся шайбой согласно аспектам настоящего описания. Приводное приспособление с качающейся шайбой может быть любым из вариантов реализации настоящего изобретения, изображенных и обсужденных со ссылками на фиг. 1-22. Хотя различные этапы способа 100 описаны ниже и изображены на фиг. 23, эти этапы не должны обязательно все быть выполнены, в некоторых случаях они могут быть выполнены в порядке, отличном от показанного, а в некоторых случаях могут быть выполнены одновременно.
Способ 100 может включать этап 102 нутации ротора относительно опоры, причем ротор содержит множество нижних зубьев ротора и множество верхних зубьев ротора. Как рассмотрено со ссылками на фиг. 7, качающаяся шайба или ротор 14 могут быть поддержаны опорой. Ротор 14 может иметь ось 24 качания, которая может выполнять прецессию или нутацию вокруг стационарной центральной оси 18. Выполняющая нутацию ось качания 24 и стационарная центральная ось 18 могут быть рассмотрены и обсуждены со ссылками на фиг. 2.
Ротор может содержать множество нижних зубьев ротора и множество верхних зубьев ротора (смотри, например, нижние зубья 30 качания и верхние зубья 32 качания соответственно, рассмотренные на фиг. 2-22). Каждый зуб из множества верхних зубьев ротора и множества нижних зубьев ротора может иметь поверхность, определенную эвольвентой окружности и эллипса, как обсуждено со ссылками на фиг. 6А, 6В, 10А и 10В. Каждый зуб из множества верхних зубьев ротора может иметь прямоугольную площадь основания на верхней поверхности ротора, как обсуждено со ссылками на фиг. 9. Каждый зуб из множества нижних зубьев ротора может иметь прямоугольную площадь основания на нижней поверхности ротора, как обсуждено со ссылками на фиг. 9.
Способ 100 может включать этап 104 побуждения первой стороны ротора к нажатию на стационарный статор в первом положении, причем статор содержит множество зубьев статора. Например, первое положение может быть нижним положением 70, изображенным на фиг. 15 и 19, где ротор 14 нажимает на стационарный статор 12. Первая сторона ротора 14 может быть нижней поверхностью 26 качания, показанной на фиг. 2. В первом положении поверхность 56 нижнего зуба ротора для нижнего зуба 30 ротора может быть в контакте с верхней поверхностью 20 статора 12. Смотри фиг. 8 для получения вида нижней поверхности 56 зуба ротора и фиг. 2 для получения вида верхней поверхности 20 статора 12.
Статор может содержать множество зубьев статора (см., например, множество зубьев 22 статора, показанных на фиг. 2). Как было обсуждено со ссылками на фиг. 6А и 6В, каждый зуб из множества зубьев 22 статора может иметь поверхность, определенную эвольвентой окружности и эллипса. Как было обсуждено со ссылками на фиг. 5, каждый зуб из множества зубьев 22 статора может иметь прямоугольную площадь основания на верхней поверхности 20 статора.
Как, кроме того, обсуждено со ссылками на фиг. 5, пара смежных зубьев 22 статора может определять шаг зубьев А2 как угловое разнесение между соответствующими положениями на каждом зубе из пары смежных зубьев 22 статора. Каждая площадь основания зуба из пары смежных зубьев 22 статора может иметь угловую ширину A3, составляющую меньше половины шага А2 зубьев.
Как обсуждено со ссылками на фиг. 4, каждый зуб из множества зубьев 22 статора может быть расположен между внутренним диаметром D1 и внешним диаметром D2, и может иметь высоту H1 зуба. Высота H1 зуба может иметь максимальное значение между внутренним диаметром D1 и внешним диаметром D2 и минимальное значение при одном диаметре из внутреннего диаметра D1 или внешнего диаметра D2.
Статор может содержать набор электромагнитов. Каждый электромагнит из набора электромагнитов может быть способным к выработке переменного магнитного поля. Напряженность и направление магнитных полей могут быть переменными. Каждый электромагнит из набора электромагнитов может быть независимо управляемым. Каждый электромагнит из набора электромагнитов может вырабатывать магнитное поле при прохождении тока через электромагнит. Ток может быть переменным током или постоянным током.
Ротор может содержать магнитный материал, способный к отклику на магнитные поля, выработанные набором электромагнитов в стационарном статоре. Первая сторона ротора может быть побуждена посредством сил магнитного поля, приложенных к ротору, к нажатию на статор, причем силы магнитного поля представляют собой отклик ротора на магнитные поля, выработанные электромагнитами статора.
Способ 100 может включать этап 106 побуждения второй стороны ротора к нажатию на выходную пластину во втором положении, причем второе положение расположено на противоположной относительно первого положения стороне ротора, а выходная пластина содержит множество выходных зубьев. Вторая сторона ротора может быть верхней поверхностью 28 качания, видной на фиг. 2. Второе положение может быть положением 78 (смещением на 180 градусов), показанным на фиг. 17 и 21, которое может быть расположено на противоположной относительно нижнего положения 70 стороне ротора, показанной на фиг. 15 и 19.
Выходная пластина может быть выполнена в виде выходного зубчатого колеса 16, а множество выходных зубьев может быть выполнено в виде множества выходных зубьев 38, показанных на фиг. 2. Как обсуждено со ссылками на фиг. 14А и 14В, каждый зуб из множества выходных зубьев 38 может иметь поверхность, определенную составной эвольвентой окружности и эллипса. Как обсуждено со ссылками на фиг. 13, каждый зуб из множества выходных зубьев 38 может иметь прямоугольную площадь основания на нижней поверхности выходной пластины.
Вторая сторона ротора может быть побуждена к нажатию на выходную пластину посредством сил магнитного поля, приложенных к ротору. Непосредственно или косвенно силами магнитного поля на роторе может быть побуждено достижение второго положения относительно выходной пластины. В примере с непосредственным воздействием сила может быть приложена к ротору во втором положении, причем сила направлена к выходной пластине. В примере с косвенным воздействием ротор может быть поддержан опорой, ближайшей к оси качания. При приложении силы магнитного поля к ротору в первом положении в направлении, удаленном от выходной пластины, второе положение на противоположной стороне ротора может быть смещено по направлению к выходной пластине, что очень похоже на качели. Таким образом, второе положение на роторе может быть побуждено к перемещению к выходной пластине совместным воздействием сил, приложенных к ротору в первом положении и к основанию опоры.
Статор на этапе 104 может определить плоскость статора. Выходная пластина на этапе 106 может быть выполнена с возможностью быть параллельной к плоскости статора, а ротор на этапе 102 может быть выполнен с возможностью наклона под углом относительно плоскости статора и выходной пластины и расположения между статором и выходной пластиной (см., например, фиг. 2).
Способ 100 может включать этап 110 взаимодействия нижних зубьев ротора с зубьями статора и верхних зубьев ротора с выходными зубьями. Этап 110 может быть выполнен одновременно с этапом 102, то есть, взаимодействие множеств зубьев может происходить при выполнении ротором нутации относительно опоры. При выполнении нутации ротором любой отдельный нижний зуб ротора может иметь периоды взаимодействия с первым зубом статора, периоды, где нижний зуб ротора не взаимодействует ни с какими зубьями, и периоды взаимодействия со вторым зубом статора, соседствующим с первым зубом статора (см. обсуждение касательно фиг. 20).
При выполнении нутации ротором любой отдельный верхний зуб ротора может иметь периоды взаимодействия с первым выходным зубом, периоды, где верхний зуб ротора не взаимодействует ни с какими зубьями, и периоды взаимодействия со вторым выходным зубом, соседствующим с первым выходным зубом. Взаимодействие между зубьями может быть скользящим контактом между поверхностями, которые могут быть определены составной эвольвентой окружности и эллипса.
Подсчет количества зубьев во множествах зубьев статора, нижних зубьев ротора, верхних зубьев ротора и выходных зубьев может быть выполнен с возможностью обеспечения количества нутаций для каждого отдельного поворота выходной пластины. Например, во взятом в качестве примера варианте реализации настоящего изобретения, показанном на фиг. 1-22, есть 180 зубьев статора, 181 нижний зуб ротора, 182 верхних зуба ротора и 181 выходной зуб. Как обсуждено со ссылками на фиг. 20, эта конфигурация приводит к передаточному числу, где ротор будет выполнять нутацию примерно 33000 раз для каждого одного поворота выходной пластины. Иными словами, выходная пластина может быть выполнена с возможностью поворота посредством нутации ротора. Однако, другие варианты выбора количества зубьев во множествах зубьев могут быть реализованы в зависимости от нужного передаточного числа и других ограничений, налагаемых конструкцией.
Способ 100 может при необходимости включать этап 108 приложения силы к ротору в направлении к статору в третьем положении. Третье положение может быть положением 76 (смещением на 90 градусов), показанным на фиг. 16 и 20. Таким образом, третье положение может быть на 90 градусов смещено от первого положения вокруг ротора в направлении нутации, где первое положение может быть нижним положением 70 и направление нутации может быть или первым направлением 72 нутации, или вторым направлением 74 нутации (см. фиг. 15 и 19).
Если ротор вступает в контакт со статором в первом положении и сила прикладывается в третьем положении, на 90 градусов повернутом вокруг ротора от первого положения, эта сила может заставить ротор выполнять нутацию в направлении к третьему положению. Таким образом, если сила притяжения приложена к положению 76 (смещению на 90 градусов) показанному на фиг. 20, и ротор 14 перемещается в этом положении по направлению к статору 12 в ответ на эту силу, одна четверть нутации, более поздняя, чем то же самое положение на роторе 14, теперь будет в нижнем положении 70 (см. фиг. 19).
Приложение силы к ротору, который всегда на 90 градусов впереди нижнего положения в направлении нутации, может запускать нутацию ротора относительно опоры. Как описано при ссылке на этап 104, силы магнитного поля могут быть приложены к ротору посредством магнитных полей, выработанных множеством электромагнитов статора. Поскольку имеет место возможность управления напряженностью и направлением магнитных полей, вырабатываемых набором электромагнитов, силы, прилагаемые к ротору, способны изменять их направление и их локализацию на роторе. Электромагнитные силы могут быть использованы для побуждения к взаимодействию зубьев ротора со статором и с выходной пластиной, а также для привода нутации самого ротора.
Способ 100 может при необходимости включать этап 112 связи выходного рычага с выходной пластиной. Существуют многочисленные способы связи поворотной пластины или зубчатого колеса с рукояткой или валом, так что угловой поворот пластины соответствует линейному перемещению рукоятки. Поскольку приводное приспособление с качающейся шайбой, используемое в способе 100, может быть выполнено так, что большое количество нутаций ротора приводит только к одному повороту выходной пластины (см. обсуждение этапа 110), такое приспособление может быть использовано для выполнения привода, способного к очень точному управлению выходной пластиной или выходной рукояткой.
Этапы способа 100 не обязательно должны быть выполнены в порядке, упомянутом выше или показанном на фиг. 23. Действительно, некоторые или все этапы способа 100 могут быть выполнены одновременно. Некоторые или все этапы способа 100 могут быть выполнены в течение определенной или всей продолжительности использования приводного приспособления с качающейся шайбой.
Кроме того, раскрытие включает варианты реализации настоящего изобретения согласно следующим пунктам:
1. Система привода с качающейся шайбой, содержащая:
- статор, имеющий центральную ось, верхнюю поверхность, перпендикулярную центральной оси, и множество зубьев статора, расположенных на верхней поверхности;
- качающуюся шайбу, имеющую
ось качания, размещенную под углом, отличным от нуля относительно центральной оси,
нижнюю поверхность качания, перпендикулярную оси качания, и
верхнюю поверхность качания, перпендикулярную оси качания,
множество нижних зубьев качания, расположенных на нижней поверхности качания, и
множество верхних зубьев качания, расположенных на верхней поверхности качания; и
- выходное зубчатое колесо, имеющее
выходную ось, по существу совпадающую с центральной
осью,
нижнюю поверхность, перпендикулярную выходной оси, и
множество выходных зубьев, расположенных на нижней поверхности;
причем качающаяся шайба выполнена с возможностью поворота при ее нутации вокруг статора.
2. Система привода с качающейся шайбой по пункту 1, в которой
качающаяся шайба имеет нижнее положение, в котором качающаяся шайба наиболее близка к статору, причем
множество нижних зубьев качания и множество зубьев статора выполнены таким образом, что множество нижних зубьев качания сначала взаимодействует с зубьями статора в положении, на 90 градусов смещенном в направлении нутации от нижнего положения.
3. Система привода с качающейся шайбой по пункту 1, в которой
каждый зуб из множества зубьев статора, множества нижних зубьев качания, множества верхних зубьев качания и множества выходных зубьев содержит поверхность, определенную составной эвольвентой окружности и эллипса.
4. Система привода с качающейся шайбой по пункту 1, в которой
статор имеет внутренний диаметр, внешний диаметр и делительную окружность, причем
множество зубьев статора расположено между внутренним и внешним диаметрами,
делительная окружность расположена между внутренним и внешним диаметрами, а
множество зубьев статора и множество нижних зубьев качания выполнены так, что набор контактных сил, приложенных множеством зубьев статора и нижних зубьев качания друг к другу, по существу касательно к делительной окружности.
5. Система привода с качающейся шайбой по пункту 4, в которой
каждый зуб из множества зубьев статора имеет высоту зуба, причем
высота зуба имеет максимальное значение между внутренним диаметром и внешним диаметром и минимальное значение при одном из внутреннего диаметра или внешнего диаметра.
6. Система привода с качающейся шайбой по пункту 1, в которой
каждый зуб из множества зубьев статора имеет прямоугольную площадь основания на верхней поверхности,
каждый зуб из множества нижних зубьев качания имеет прямоугольную площадь основания на нижней поверхности качания,
каждый зуб из множества верхних зубьев качания имеет прямоугольную площадь основания на верхней поверхности качания, и
каждый зуб из множества выходных зубьев имеет прямоугольную площадь основания на нижней поверхности.
7. Система привода с качающейся шайбой по пункту 1, в которой
пара смежных зубьев статора определяет шаг зубьев как угловое разнесение между соответствующими положениями на каждом зубе из пары смежных зубьев статора;
каждый зуб из пары смежных зубьев статора определяет площадь основания зуба на верхней поверхности; и
каждая площадь основания зуба из пары смежных зубьев статора имеет угловую ширину, меньшую половины шага зуба.
8. Способ работы приводного приспособления с качающейся шайбой, включающий:
- выполнение нутации ротора вокруг опоры, причем
ротор содержит множество нижних зубьев ротора и множество верхних зубьев ротора,
- побуждение первой стороны ротора к нажатию на стационарный статор в первом положении, причем
статор содержит множество зубьев статора,
- побуждение второй стороны ротора к нажатию на выходную пластину во втором положении, причем
второе положение расположено на противоположной стороне ротора относительно первого положения, и
выходная пластина содержит множество выходных зубьев, и
- взаимодействие нижних зубьев ротора с зубьями статора и верхних зубьев ротора с выходными зубьями при выполнении нутации ротором вокруг опоры.
9. Способ по пункту 8, в котором
каждый зуб из множества зубьев статора, нижних зубьев ротора, верхних зубьев ротора и выходных зубьев имеет поверхность, определенную составной эвольвентой окружности и эллипса.
10. Способ по пункту 8, в котором
каждый зуб из множества зубьев статора имеет прямоугольную площадь основания на верхней поверхности статора,
каждый зуб из множества нижних зубьев ротора имеет прямоугольную площадь основания на нижней поверхности ротора,
каждый зуб из множества верхних зубьев ротора имеет прямоугольную площадь основания на верхней поверхности ротора, и
каждый зуб из множества выходных зубьев имеет прямоугольную площадь основания на нижней поверхности выходной пластины.
11. Способ по пункту 10, в котором
пара смежных зубьев статора определяет шаг зубьев как угловое разнесение между соответствующими положениями на каждом зубе из пары смежных зубьев статора;
каждый зуб из пары смежных зубьев статора определяет площадь основания зуба на верхней поверхности; и
каждая площадь основания зуба из пары смежных зубьев статора имеет угловую ширину, меньшую половины шага зуба.
12. Способ по пункту 8, в котором
статор определяет плоскость статора,
выходная пластина выполнена параллельной плоскости статора, и
ротор выполнен с возможностью наклона под углом относительно плоскости статора и выходной пластины и расположен между статором и выходной пластиной.
13. Способ по пункту 8, дополнительно включающий
приложение силы к ротору в направлении к статору в третьем положении, которое смещено на 90 градусов от первого положения вокруг ротора в направлении нутации.
14. Способ по пункту 8, в котором
каждый зуб из множества зубьев статора расположен между внутренним диаметром и внешним диаметром и имеет высоту зуба, причем
высота зуба имеет максимальное значение между внутренним диаметром и внешним диаметром и минимальное значение при одном из внутреннего диаметра или внешнего диаметра.
15. Зубчатое колесо для использования в выполняющей нутацию системе привода с качающейся шайбой, содержащее:
- центральную ось, поверхность, перпендикулярную центральной оси, внутренний диаметр и внешний диаметр;
- набор зубьев, расположенных на поверхности между внутренним диаметром и внешним диаметром, причем
- по меньшей мере один зуб из набора зубьев, имеющих первую ведущую поверхность, проходит от внутреннего диаметра до внешнего диаметра, причем
первая ведущая поверхность определена составной эвольвентой окружности и эллипса, а
указанный по меньшей мере один зуб из набора зубьев расположен на поверхности между внутренним диаметром и внешним диаметром.
16. Зубчатое колесо по пункту 15, в котором
по меньшей мере один зуб из набора зубьев имеет прямоугольную площадь основания на поверхности.
17. Зубчатое колесо по пункту 15, в котором
пара смежных зубьев определяет шаг зубьев как угловое разнесение между соответствующими положениями на каждом зубе из пары смежных зубьев;
каждый зуб из пары смежных зубьев определяет площадь основания зуба на верхней поверхности; и
каждая площадь основания зуба из пары смежных зубьев имеет угловую ширину, меньшую половины шага зуба.
18. Зубчатое колесо по пункту 15, в котором
по меньшей мере один из зубьев имеет вторую ведущую поверхность, определенную составной эвольвентой окружности и эллипса, причем
вторая ведущая поверхность расположена напротив первой ведущей поверхности.
19. Зубчатое колесо по пункту 18, в котором
по меньшей мере один из зубьев имеет верхнюю поверхность зуба, имеющую высоту зуба, причем
верхняя поверхность зуба вытянута от первой ведущей поверхности до второй ведущей поверхности; и
высота зуба имеет максимальное значение между внутренним диаметром и внешним диаметром и минимальное значение при одном из внутреннего диаметра или внешнего диаметра.
20. Зубчатое колесо по пункту 15, в котором
набор зубьев выполнен таким образом, что контактные силы, действующие на зубья со стороны другого зубчатого колеса в выполняющей нутацию системе привода с качающейся шайбой, будут направлены по существу параллельно касательной к делительной окружности, расположенной между внутренним диаметром и внешним диаметром.
Преимущества, характеристики, выгоды
Варианты реализации описанной здесь системы привода с качающейся шайбой предусматривают несколько преимуществ по сравнению с известными техническими решениями, предназначенными для проектирования двигателей с высокими значениями передаточного отношения, которые также занимают небольшой объем. Согласно настоящему описанию передаточные отношения, составляющие десятки тысяч, возможны при использовании лишь статора, качающейся шайбы и выходной пластины, причем такие приспособления могут быть размещены в пределах небольшого объема. Например, описанные здесь иллюстративные варианты реализации настоящего изобретения обеспечивают возможность неэксцентрикового перемещения выполняющей нутации качающейся шайбы. Никакая известная система или устройство не могут выполнить эти функции, особенно в таком небольшом объеме. Таким образом, описанные здесь иллюстративные варианты реализации настоящего изобретения особенно полезны для создания приводов с очень точным управлением двигателя. Однако, не все описанные здесь варианты реализации дают одинаковые преимущества или одну и ту же степень преимущества.
Заключение
Изложенное выше описание способно охватывать множество четко выраженных описаний с независимой степенью полезности. Хотя каждое из этих раскрытий было раскрыто в его предпочтительной форме (формах), конкретные варианты их реализации, раскрытые и иллюстрированные здесь, нельзя рассматривать в смысле ограничения, поскольку возможны многочисленные вариации. В той мере, в какой заголовки разделов использованы в пределах этого раскрытия, такие заголовки предназначены только для организационных целей и не представляют собой характеристику любого заявляемого раскрытия. Предмет раскрытия (раскрытий) включает все новые и неочевидные комбинации и подкомбинации различных элементов, особенностей, функций и/или свойств, раскрытых здесь. Последующие пункты формулы изобретения в частности указывают на определенные комбинации и подкомбинации, рассматриваемые как новые и неочевидные. Раскрытие (раскрытия), реализованное (реализованные) в других комбинациях и подкомбинациях особенностей, функций, элементов и/или свойств, могут быть описаны в заявках, испрашивающих приоритет на основании настоящей заявки или связанной заявки. Такие пункты формулы, направленные или к другому раскрытию или к тому же самому раскрытию, и более широкие, более узкие, равные или отличные по объему от первоначальных пунктов формулы, также полагают включенными в объект раскрытия (раскрытий) настоящего раскрытия.
Реферат
Группа изобретений относится к области машиностроения. Система (10) привода с качающейся шайбой содержит статор (12), имеющий центральную ось (18), верхнюю поверхность (20), перпендикулярную центральной оси, и множество зубьев (22) статора, расположенных на верхней поверхности, качающуюся шайбу (14), имеющую ось качания (24), размещенную под углом, отличным от нуля, относительно центральной оси, нижнюю поверхность (26) качания, перпендикулярную оси качания и верхнюю поверхность (28) качания, перпендикулярную оси качания, множество нижних зубьев (30) качания, расположенных на нижней поверхности качания, и множество верхних зубьев (32) качания, расположенных на верхней поверхности качания, и выходное зубчатое колесо (16), имеющее выходную ось (34), по существу совпадающую с центральной осью, нижнюю поверхность (36), перпендикулярную выходной оси, и множество выходных зубьев (38), расположенных на нижней поверхности. Качающаяся шайба выполнена с возможностью поворота при ее нутации вокруг статора. Также заявлен способ работы системы привода с качающейся шайбой. Обеспечивается улучшение эксплуатационных характеристик системы привода с качающейся шайбой. 2 н. и 12 з.п. ф-лы, 26 ил.
Комментарии