Винт для летательного аппарата, способного к зависанию, и соответствующий способ - RU2733456C1
Код документа: RU2733456C1
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к винту для летательного аппарата, способного к зависанию, в частности вертолета или конвертоплана. Настоящее изобретение также относится к способу эксплуатации винта для летательного аппарата, способного к зависанию, в частности вертолета или конвертоплана.
УРОВЕНЬ ТЕХНИКИ
Известные вертолеты содержат фюзеляж, несущий винт, выступающий вверх из фюзеляжа, и хвостовой винт, который расположен в хвостовой части фюзеляжа. Более того, известные вертолеты содержат турбину, основную трансмиссионную группу, которая передает движение от турбины несущему винту, и дополнительную трансмиссионную группу, которая передает движение от основной трансмиссионной группы хвостовому винту.
Каждый из несущего винта и хвостового винта содержит:
- неподвижный корпус;
- колонку, которая приводится во вращение основной или дополнительной трансмиссионной группой вокруг ее собственной оси;
- втулку, приводимую во вращение колонкой; и
- множество лопастей, которые шарнирно соединены относительно втулки.
В уровне техники ощущается необходимость в обеспечении вращающихся компонентов несущего и хвостового винта, т.е. колонки, втулки и лопастей, электроэнергией. Например, электроэнергия может быть использована для активации противообледенительной или антиобледенительной системы, образованной множеством электрических проводников, встроенных в лопастях и выполненных с возможностью нагревания соответствующих лопастей с помощью эффекта Джоуля, или для активации некоторых подвижных поверхностей на лопастях. Для того, чтобы обеспечивать вращающиеся компоненты несущего винта требуемой электроэнергией, известные вертолеты обычно содержат электрический генератор, приводимый в действие валом, электрически соединенным с основной трансмиссионной группой, и скользящее кольцо. Скользящее кольцо передает электроэнергию путем создания трущегося контакта от неподвижных проводников, электрически соединенных с генератором, вращающимся проводникам несущего или хвостового винта. Даже при хорошем исполнении ранее описанные решения оставляют место для улучшений. На самом деле скользящее кольцо является сложным в изготовлении и обслуживании и легко подвергается эффекту износа. Этот недостаток усугубляется особенно в противодействующих крутящему моменту хвостовых винтах, которые вращаются с более высокой скоростью, чем несущий винт. В связи с этим в промышленности ощущается необходимость в передаче электроэнергии вращающимся частям несущего или хвостового винта, при этом исключая вышеуказанные недостатки простым, низкозатратным образом. Еще точнее, ощущается необходимость в контроле за рабочим статусом вспомогательных компонентов в целях безопасности, при этом исключая ранее идентифицированные недостатки. Например, ощущается необходимость в контроле за тем, есть ли у них электропитание, уровнем электроэнергии, которым они питаются, наличием коротких замыканий.
US 2016/32977, US 2014/248168; US-B-8,851,415 и US-A-2012/229428 раскрывают известные решения винтов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение винта для летательного аппарата, способного к зависанию, который удовлетворяет по меньшей мере одному из вышеуказанных требований.
Вышеупомянутая задача решается с помощью настоящего изобретения, поскольку оно относится к винту для летательного аппарата, способного к зависанию, как заявлено в пункте 1 формулы изобретения.
Изобретение также относится к способу эксплуатации винта для летательного аппарата, способного к зависанию, как заявлено в пункте 14 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Пять предпочтительных вариантов выполнения раскрыты ниже для более хорошего понимания настоящего изобретения в качестве неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
- Фиг. 1 представляет собой схематический вид вертолета, содержащего несущий и хвостовой винт в соответствии с настоящим изобретением;
- Фиг. 2 представляет собой поперечное сечение несущего винта на Фиг. 1 в соответствии с первым вариантом выполнения настоящего изобретения;
- Фиг. 3 представляет собой схематический вид электрических цепей винта на Фиг. 2;
- Фиг. 4 представляет собой поперечное сечение хвостового винта на Фиг. 2 в соответствии со вторым вариантом выполнения настоящего изобретения;
- Фиг. 5 представляет собой схематический вид электрической цепи винта на Фиг. 4;
- Фиг. 6 представляет собой схематический вид электрической цепи хвостового винта в соответствии с третьим вариантом выполнения настоящего изобретения;
- Фиг. 7 представляет собой схематический вид электрической цепи хвостового винта в соответствии с четвертым вариантом выполнения настоящего изобретения;
- Фиг. 8 представляет собой схематический вид дополнительной электрической цепи винта на Фиг. 1-7;
- Фиг. 9 представляет собой графическое изображение некоторых электрических величин электрических цепей винта на Фиг. 1-7 в отношении времени; и
- Фиг. 10 и 11 показывают в увеличенном виде некоторые компоненты дополнительных электрических цепей винтов на Фиг. 2 и 8 с частями, удаленными для ясности.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
На Фиг. 1 ссылочной позицией 1 обозначен летательный аппарат, способный к зависанию, в частности вертолет.
Вертолет 1 по существу содержит (Фиг. 1) фюзеляж 2 с носовой частью 5; несущий винт 3, установленный в верхней части фюзеляжа 2 и вращаемый вокруг оси A; и противодействующий крутящему моменту хвостовой винт 4, установленный на киле, выступающем из фюзеляжа 2 на конце, противоположном носовой части 5, и вращаемый вокруг оси B, поперечной оси A.
Конкретнее, несущий винт 3 обеспечивает вертолет 1 подъемной силой для его поднятия и тягой для перемещения его вперед, при этом винт 4 прилагает усилие к килю для генерирования выравнивающего крутящего момента на фюзеляже 2. Выравнивающий крутящий момент уравновешивает крутящий момент, прилагаемый к фюзеляжу 2 несущим винтом 3, который в противном случае вращал бы фюзеляж 2 вокруг оси A.
Вертолет 1 также содержит:
- пару турбин 6 (только одна из которых показана);
- основную трансмиссионную группу 7, которая передает движение от турбины 6; и
- дополнительную трансмиссионную группу 8, которая передает движение от основной трансмиссионной группы 7 хвостовому винту 4.
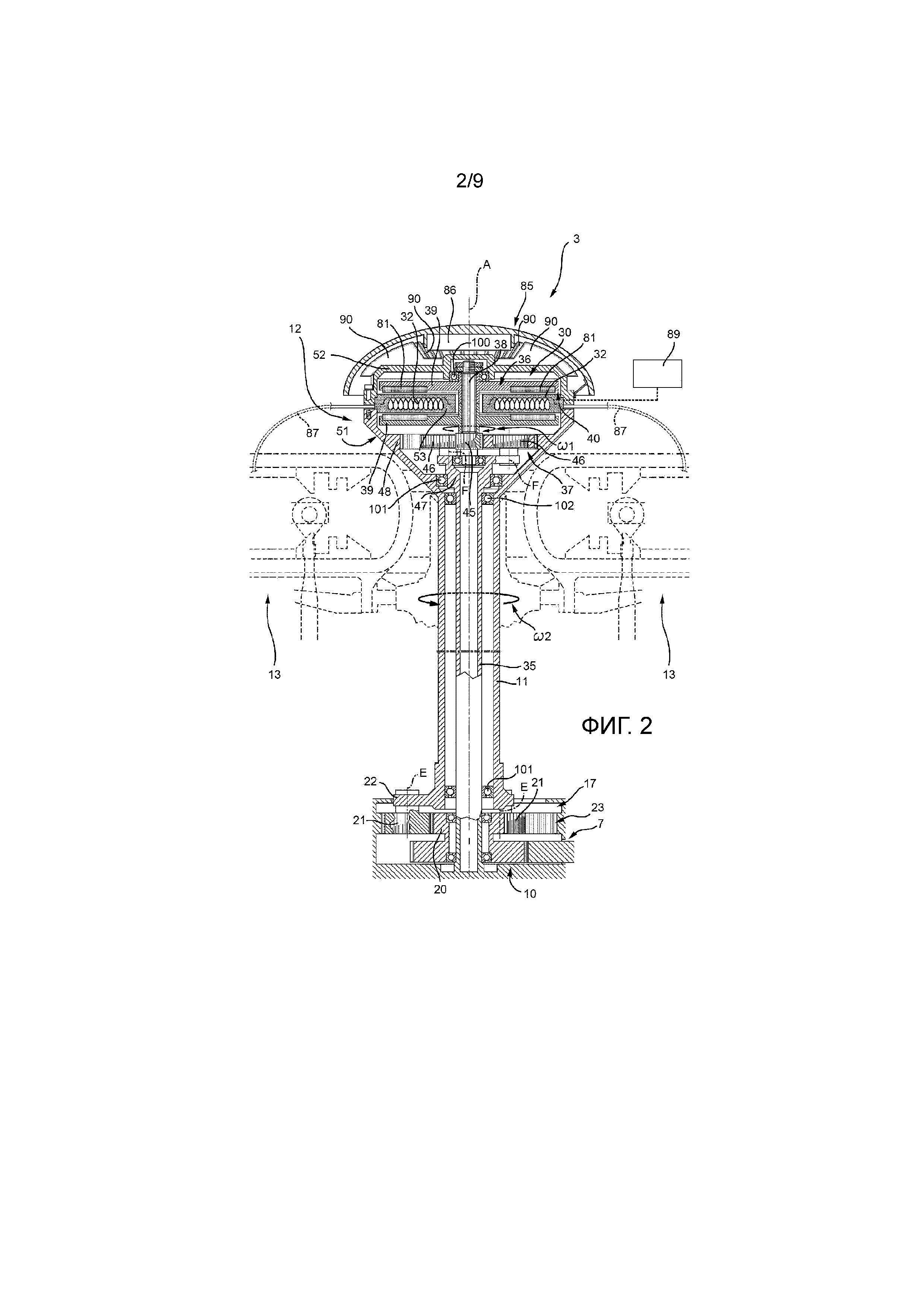
Как показано на Фиг. 2, винт 3 по существу содержит:
- статор 10, который прикреплен к фюзеляжу 2;
- колонку 11, которая является вращаемой вокруг оси A относительно статора 10;
- втулку 12, которая выполнена за одно целое с возможностью вращения с колонкой 11; и
- множество лопастей 13 (только две из которых показаны на Фиг. 2), которые шарнирно соединены с втулкой 12.
В показанном варианте выполнения статор 10 является неподвижным относительно оси A. Более того, статор 10, колонка 11 и втулка 12 являются полыми. Винт 3 также содержит блок 17 шестерен эпициклической передачи, который передает движение от концевого вала (не показан) основной трансмиссионной группы 7 колонке 11 и втулке 12.
Подробно, блок 17 шестерен эпициклической передачи является соосным с осью А и содержит:
- солнечную шестерню 20, которая приводится во вращение вокруг оси A с помощью концевого вала основной трансмиссионной группы 7 и содержит радиально внешние зубья;
- множество планетарных шестерен 21 (только две показаны на Фиг. 2), каждая из которых содержит радиально внутренние зубья, сцепляющиеся с солнечной шестерней 20, и радиально внешние зубья, сцепляющиеся с радиально внутренними зубьями, образованными статором 10; и
- водило 22, которое выполнено за одно целое с возможностью вращения и соединено с планетарными шестернями 21 и с колонкой 11.
В частности, статор 10 действует в качестве неподвижного венца 23 блока 17 шестерен эпициклической передачи.
Планетарные шестерни 21 вращаются вокруг соответствующих осей E, параллельных оси A, и вращаются вокруг оси A.
Предпочтительно, винт 3 содержит (Фиг. 2 и 3):
- поддерживающий элемент 36, который поддерживает источник 30 магнитного поля BS и приводится во вращение вокруг оси A со скоростью ω1 вращения; и
- электрическую цепь 32, которая функционально соединена с колонкой 11 и приводится во вращение со скоростью ω2 вращения, отличной от первой скорости ω1 вращения; электрическая цепь 32 электромагнитно связана с указанным источником 30 так, что электродвижущая сила emfR индуцируется магнитным полем, при использовании, в электрической цепи 32 и электрический ток iR течет в электрической цепи 32;
- электрическую цепь 65, которая расположена на статоре 10; и
- датчик 58, который выполнен с возможностью обнаружения величины, связанной с обратной электродвижущей силой bemfC, индуцируемой в поддерживающем элементе 36, и связанной с током iR, текущим в электрической цепи 32.
Таким образом, источник 30 и электрическая цепь 32 образуют электрический генератор, который индуцирует электродвижущую силу emfR в колонке 11 и в связи с этим во втулке 12 и лопастях 13 за счет дифференциальной скорости ω2-ω1 вращения.
В показанном варианте выполнения источник 30 содержит множество постоянных магнитов 81, которые установлены на поддерживающем элементе 36 и разнесены под углом относительно оси A. Электродвижущая сила emfR генерирует электрический ток iR в электрической цепи 32. Ток iR генерирует магнитное поле BR, которое, в свою очередь, индуцирует согласно закону Фарадея обратную электродвижущую силу bemfC в статоре 10. В показанном варианте выполнения электрический генератор представляет собой машину с осевым потоком, в которой магнитное поле, генерируемое источником 30, в основном направляется параллельно оси A.
Электрическая цепь 32 содержит (Фиг. 3) множество ветвей 60 (три в показанном варианте выполнения), которые продолжаются частично внутри соответственных лопастей 13 и электрически соединены друг с другом в общем узле 61. Каждая ветвь 60 содержит резистивную нагрузку 62, которая расположена на соответствующей лопасти 13. Электрический ток, текущий в ветвях 60, обозначен на Фиг. 3 как iR. Нагрузки 62 могут определяться электрической цепью, встроенной внутри самих лопастей 13, и питаться электрическим током iR. Эта электрическая цепь работает в качестве антиобледенительной системы или противообледенительной системы. В другом варианте выполнения нагрузки 62 могут быть определены соответственными приводами, которые питаются электрическим током iR.
Как показано на Фиг. 10 и 11, электрическая цепь 32 содержит для каждой ветви 60 множество, две в показанном варианте выполнения, обмоток 68 и соответственных переключателей 69. Обмотки 68 и переключатели 69 каждой ветви 60 расположены между узлом 61 и соответствующей нагрузкой 62. Каждая ветвь 60 электрической цепи 32 также содержит, в одном варианте выполнения, показанном на Фиг. 11, возвратный участок 66, который продолжается от соответствующей нагрузки 62 и узла 61 и расположен на противоположной стороне нагрузки 62 относительно обмоток 68. Ветвь 60 также содержит переключатель 65, расположенный на соответствующем участке 66. Альтернативно, электрическая цепь 32 содержит только возвратный участок 71, общий для всех ветвей 60, который электрически соединяет все нагрузки 62 с узлом 61 и вдоль которого расположен переключатель 66 (Фиг. 10).
Таким образом, обеспечивается определенная степень избыточности в случае неисправности одной из обмоток 68 или коротких замыканий некоторых из обмоток 68. Переключатели 65, 69 и участок 71 не показаны на Фиг. 3 и 5-7.
Каждая ветвь 60 имеет эквивалентное сопротивление RR и индуктивность LR, которые на Фиг. 3 смоделированы с помощью резистора и индуктора соответственно. Более того, на Фиг. 3 электродвижущие силы emfR, воздействующие на соответственные ветви 60, смоделированы с помощью генератора переменного напряжения. Каждая ветвь 60 также содержит участок 87 (Фиг. 2), который продолжается между втулкой 12 и соответствующей лопастью 13. Источник 30 содержит множество разнесенных под углом постоянных магнитов 81 (только один из которых показан на Фиг. 2), которые генерируют магнитное поле BS, параллельное оси A.
Электрическая цепь 65 представляет собой, в показанном варианте выполнения, открытую катушку 67, которая электромагнитно связана с электрической цепью 32. Электрическая цепь 65 имеет эквивалентные электрическое сопротивление RC и индуктивность LC, которые на Фиг. 3 смоделированы с помощью резистора и индуктора соответственно. Более того, на Фиг. 3 обратная электродвижущая сила bemfC, воздействующая на электрическую цепь 65, смоделирована с помощью генератора переменного напряжения. Датчик 58 представляет собой датчик напряжения и выполнен с возможностью обнаружения напряжения VC в электрической цепи 65 и с возможностью генерирования сигнала, связанного с напряжением VC.
Винт 3 дополнительно содержит электрическую цепь 80 (только схематически показана на Фиг. 8), которая принимает на входе сигнал, генерируемый датчиком 58, и выдает пиковое значение VCmax напряжения VC и в связи с этим обратной электродвижущей силы befmC. Пиковое значение VCmax напряжения VC связано с пиковым значением тока iR, текущего внутри нагрузок 62. В частности, на основе пикового значения VCmax напряжения VC и в связи с этим пикового значения тока iR возможно распознавать следующие рабочие конфигурации электрической цепи 32:
- пиковое значение тока iR является нулевым; это состояние соответствует тому, что у нагрузок 62 отсутствует электропитание, и, например, антиобледенительная система не работает;
- пиковое значение тока iR ниже, чем максимальное значение; это состояние соответствует неисправности одной или некоторых из обмоток 68; и
- пиковое значение тока iR выше, чем максимальное значение; это состояние соответствует короткому замыканию обмоток 68, электрически соединенных с одной и той же нагрузкой 62.
Винт 3 дополнительно содержит блок 200 управления (Фиг. 8), который принимает пиковое значение VCmax напряжения VC от электрической цепи 80 и выполнен с возможностью соответственного управления переключателями 65, 69 или генерирования сигнала предупреждения. Например, в случае короткого замыкания обмоток 68, соединенных с одной и той же нагрузкой 62, блок 200 управления запрограммирован с возможностью установки соответствующего переключателя 65 в разомкнутом положении. В случае неисправности одной из обмоток 68, соединенных с нагрузкой 62, блок 200 управления запрограммирован с возможностью установки соответствующего переключателя 68 в разомкнутом положении. В случае неисправности обмотки 62 блок 200 управления генерирует предупредительный сигнал для пилота.
Винт 3 дополнительно содержит:
- вал 35, который является вытянутым параллельно оси A и прикреплен к статору 10;
- поддерживающий элемент 36; и
- блок 37 шестерен эпициклической передачи.
Поддерживающий элемент 36 содержит:
- вал 38, вытянутый вокруг оси A;
- пару дисков 39, выступающих из вала 38 перпендикулярно оси A.
Диски 39 содержат соответственные поверхности 40, которые обращены друг к другу вдоль оси A и на которых установлены постоянные магниты 81.
Блок 37 шестерен эпициклической передачи по существу содержит:
- радиально внешние зубья, образованные в осевом направлении концевой шестерней 45 вала 38, которая расположена на осевой стороне статора 10;
- множество планетарных шестерен 46, которые продолжаются вокруг соответственных осей F параллельно и в шахматном порядке от оси А, и каждая из которых имеет радиально внешние зубья относительно соответствующей оси F, сцепляющиеся с радиально внешними зубьями концевой шестерни 45;
- водило 47, которое выполнено за одно целое с возможностью вращения и соединено с планетарными шестернями 46 на одной осевой стороне и соединено с валом 35 на другом осевой стороне; и
- кольцеобразное кольцо 48, которое соединено и выполнено за одно целое с возможностью вращения с втулкой 12 и которое содержит радиально внутренние зубья относительно оси А, сцепляющиеся с радиально внешними зубьями планетарных шестерен 46.
Планетарные шестерни 46 вращаются вокруг соответственных осей F и закручиваются вокруг оси А.
Втулка 12 содержит:
- основной трубчатый корпус 51; и
пару колец 52, 53, которые продолжаются от корпуса 51 по направлению к оси А и перпендикулярно оси A.
Кольцо 52 ограничивает втулку 12 на осевой стороне статора 10. Кольцо 53 в осевом направлении расположено между кольцами 52, 48. Более того, кольцо 48 продолжается от корпуса 51 по направлению к оси А и перпендикулярно оси A. Кольцо 53 поддерживает электрическую цепь 32. Кольцо 52 в осевом направлении расположено между дисками 39 поддерживающего элемента 36. Кольца 52, 53 окружают вал 38 и вал 35 соответственно с расположением между ними радиального зазора.
В связи с этим возможно идентифицировать три узла внутри винта 3, которые имеют соответствующую скорость вращения вокруг оси A:
- статор 10 и вал 35, которые являются неподвижными вокруг оси A;
- поддерживающий элемент 36 и источник 30, которые вращаются со скоростью ω1 вращения в первом направлении вокруг оси A; и
- колонку 11, втулку 12 с электрической цепью 32, которые вращаются со скоростью ω2 вращения во втором направлении, противоположном первому направлению, вокруг оси A.
Винт 3 также содержит полый дефлектор 85 потока, который соединен с осевым концом втулки 12 и выполнен за одно целое с возможностью вращения с втулкой 12. Дефлектор 85 потока ограничивает винт 3 на противоположной осевой стороне статора 10. Дефлектор 85 потока вмещает один диск 39, верхний осевой конец вала 38, противоположный валу 46, и диск 52. Более того, дефлектор 85 потока вмещает электронный блок 86 управления для управления постоянными магнитами 81 и электрической цепью 32. Предпочтительно, дефлектор 85 потока обеспечен устройством 89 хранения электроэнергии, которое заряжается электрическим током, текущим внутри электропроводящего элемента 32. Дефлектор 85 потока изготовлен из металла и содержит множество теплопроводящих колец 90, которые соединены с кольцом 53.
Винт 3 дополнительно содержит, относительно оси А:
- подшипник 100, который радиально расположен между валом 38 и втулкой 12 относительно оси А; и
- пару в осевом направлении разнесенных подшипников 101, которые радиально расположены между валом 35 и колонкой 11 и втулкой 12 относительно оси A.
При использовании концевой вал основной трансмиссионной группы 7 приводит во вращение солнечную шестерню 20 блока 17 шестерен эпициклической передачи вокруг оси A. Соответственно, также планетарная шестерня 21 и водило 22 вращаются вокруг оси А, таким образом приводя во вращение колонку 11, втулку 12 и лопасти 13 вокруг этой же оси A. Лопасти 13 приводятся во вращение втулкой 12 вокруг оси A и могут перемещаться относительно втулки 12 известным образом. Втулка 12, кольцо 48 и в связи с этим электропроводящий элемент 32 вращаются вокруг оси со скоростью ω2 вращения вокруг оси A. Между тем блок 37 шестерен эпициклической передачи принимает движение от кольца 48, вращающегося со скоростью ω2 вращения вокруг оси A, и приводит во вращение поддерживающий элемент 36, в связи с этим источник 30 и постоянные магниты 81 со скоростью ω1 вращения вокруг оси A. В частности, кольцо 48, выполненное за одно целое с втулкой 12, сцепляется с планетарными шестернями 46, неподвижными вокруг оси А, и планетарные шестерни 46 сцепляются с шестерней 45, выполненной за одно целое с возможностью вращения с поддерживающим элементом 36 и источником 30. В результате источник 30 вращается со скоростью ω1 вращения, электрическая цепь 32 вращается со скоростью ω2 вращения, отличной от скорости ω1 вращения, а источник 30 и проводящий элемент 32 обращены друг к другу вдоль оси A. Таким образом, магнитное поле BS генерируется источником 30, и электродвижущая сила emfR индуцируется магнитным полем, при помощи закона Фарадея, в ветвях 60, вращающихся за одно целое с втулкой 12. Электродвижущие силы emfR вызывают протекание электрических токов iR в ветвях 60 и нагрузках 62. В частности, когда переключатели 65 замкнуты, электрический ток iR течет внутри соответствующих обмоток 68 и электрически питает нагрузки 62. Ток iR используется для нескольких целей. Например, он может быть использован для питания электрических цепей внутри лопастей 13 и обеспечения противообледенительной или антиобледенительной функции. Альтернативно или в совокупности, электродвижущая сила может быть использована для приведения в действие приводов, установленных на лопастях 13. Будучи токами iR, переменными во времени, они генерируют магнитное поле BR, которое является переменным во времени. Переменное во времени магнитное поле BR индуцирует, при помощи закона Фарадея, обратную электродвижущую силу bemfC в электрической цепи 65.
Датчик 58 воспринимает напряжение VC в электрической цепи 65. Будучи напряжением VC, генерируемым переменным током, сигнал, генерируемый датчиком 58, имеет характерный профиль (пример которого показан на Фиг. 9), который модулируется электрическим током iR. В частности, амплитуда и частота тока iR и напряжения VC зависит от скорости ω2 вращения колонки 11 и втулки 12. Для заданной нагрузки 62 и скорости ω2 вращения сигнал пропорционален току iR и периодичен с частотой, зависящей от скорости ω2 вращения колонки 11 и втулки 12. Таким образом, сигнал содержит полезную информацию о работе нагрузок 62. Предпочтительно, электрическая цепь 80 принимает на входе сигнал, генерируемый датчиком 58, и выдает пиковое значение VCmax напряжения VC и в связи с этим обратной электродвижущей силы befmC. Пиковое значение VCmax напряжения VC пропорционально пиковому значению тока iR, текущего внутри нагрузок 62. В частности, на основе пика значения VCmax напряжения VC и в связи с этим тока iR возможно распознавать следующую рабочую конфигурацию электрической цепи 32 и нагрузок 62:
- пиковое значение тока iR является нулевым; это состояние соответствует тому, что у нагрузок 62 отсутствует электропитание, и, например, антиобледенительная система не работает; и
- пиковое значение тока iR ниже, чем максимальное значение; это состояние соответствует неисправности одной или некоторых из обмоток 68; и
- пиковое значение тока iR выше, чем максимальное значение; это состояние соответствует короткому замыканию некоторых из обмоток 68.
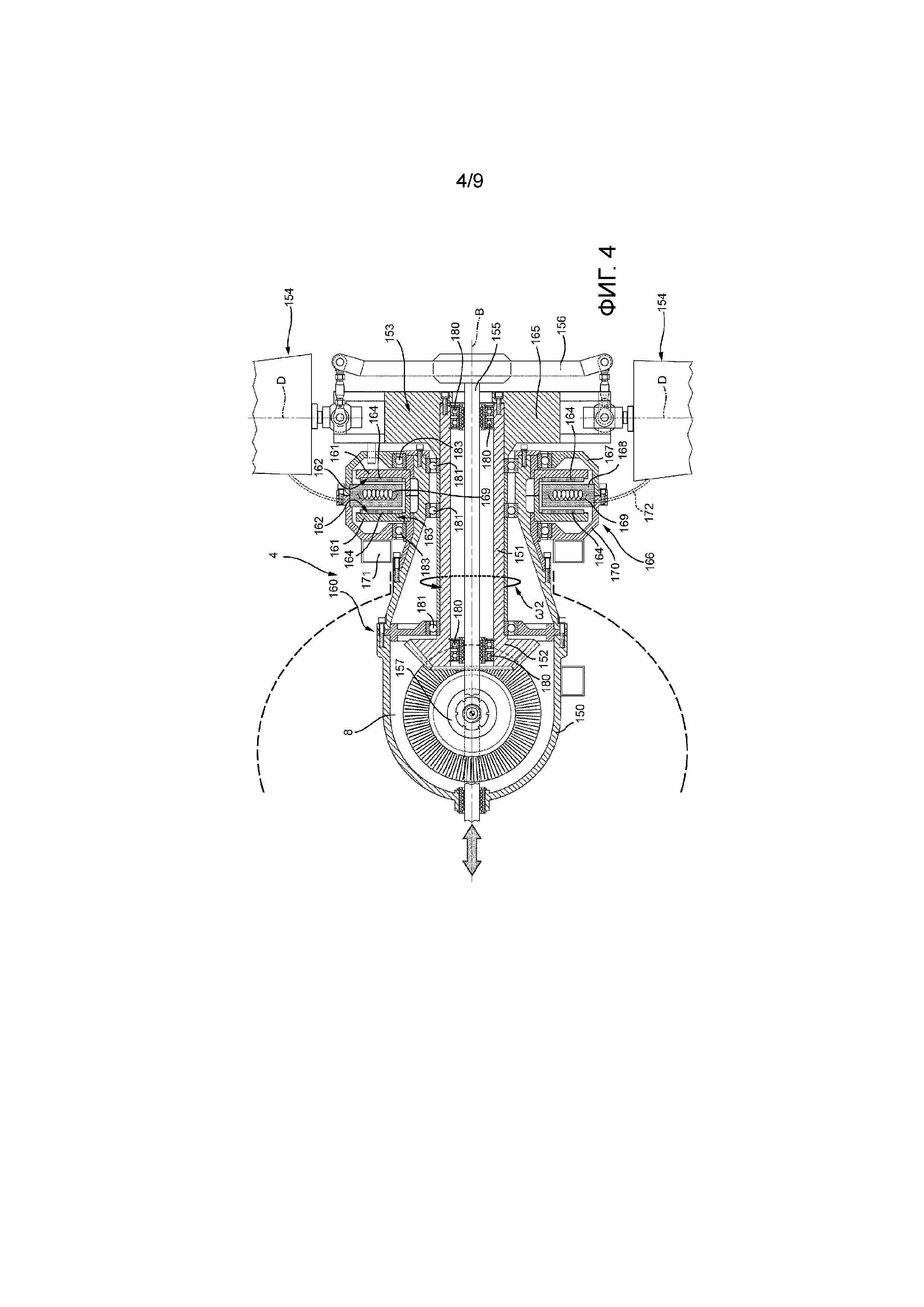
На Фиг. 4 и 5 ссылочная позиция 4 обозначает, в целом, противодействующий крутящему моменту хвостовой винт согласно второму варианту выполнения настоящего изобретения.
Винт 4 подобен винту 3 и будет описан ниже только в той части, в которой он отличается от него; соответствующие или эквивалентные части винтов 4, 3 будут обозначены там, где это возможно, одинаковыми ссылочными позициями.
В частности, винт 4 по существу содержит (Фиг. 4):
- полый кожух 150, который установлен на фюзеляже 2;
- полую колонку 151, которая является вращаемой вокруг оси B, поперечной оси А, со скоростью ω2 вращения, и соединена с концевым валом 157 дополнительной трансмиссионной группы 8 посредством конической шестерни 152, расположенной на осевом конце колонки 151;
- втулку 153, которая выполнена за одно целое с возможностью вращения и соединена с колонкой 151; и
- множество лопастей 154 (только две из которых показаны на Фиг. 4), которые шарнирно соединены с втулкой 153 и продолжаются вдоль соответственных продольных осей D.
Коническая шестерня 152 и колонка 151 содержатся внутри кожуха 150. Втулка 153 и лопасти 154 продолжаются снаружи кожуха 150.
Винт 4 также содержит управляющий стержень 155, который продолжается вдоль оси B и является скользящим вдоль оси B относительно колонки 151. Управляющий стержень 155 содержит осевой конец на противоположной стороне шестерни 152, который прикреплен к рычагу 156. Рычаг 156 продолжается поперечно оси B и соединен с лопастями 154 эксцентрично соответствующим осям D. Таким образом, перемещение стержня 155 вдоль оси B вызывает вращение лопастей 154 вдоль соответствующих осей D и регулировку соответствующих углов тангажа.
Более подробно, кожух 150 содержит:
- основной корпус 160, вытянутый вдоль оси B; и
- пару кольцеобразных дисков 161, которые радиально выступают из корпуса 160 на противоположной стороне оси B и лежат на соответствующих плоскостях, перпендикулярных оси B.
Диски 161 содержат соответствующие поверхности 162, которые в осевом направлении обращены друг к другу и на которых установлены соответственные постоянные магниты 164. Постоянные магниты 164 генерируют магнитное поле BS, параллельное оси B.
Втулка 153 содержит:
- корпус 165, который соединен с колонкой 151, расположен в передней части осевого конца кожуха 150 на осевой противоположной стороне относительно конической шестерни 152; и
- корпус 166, который соединен с корпусом 165 и окружает открытый осевой конец кожуха 150, противоположный конической шестерне 152.
Более подробно, лопасти 154 шарнирно соединены с корпусом 165. Корпус 166 содержит, следуя вдоль оси B от корпуса 165 по направлению к конической шестерне 152:
- кольцеобразное кольцо 167, соединенное с корпусом 165;
- кольцеобразное кольцо 168, на котором закреплена электрическая цепь 169; и
- кольцеобразное кольцо 170, на котором установлен электронный блок 171 управления для управления электрической цепью 169.
Кольцо 168 в осевом направлении расположено между дисками 161. Электрическая цепь 169 в осевом направлении расположена между постоянными магнитами 164.
Таким образом, электрическая цепь 169, вращающаяся со скоростью ω2 вращения, магнитно связана с источником 163 магнитного поля BS, вращающимся со скоростью ω1=0 вращения, т.е. неподвижным вокруг оси B. Соответственно, постоянные магниты 164 и электрическая цепь 169 образуют электрический генератор, который индуцирует согласно закону Фарадея электродвижущую силу emfR в колонке 151 и в связи с этим во втулке 152 и лопастях 154 за счет дифференциальной скорости ω2-ω1=ω2 вращения. Электрическая цепь 169 электрически соединена с лопастями 154 посредством электрических проводов 172. Таким образом, электрический ток iR доступен для лопастей 154.
Наконец, винт 4 содержит, относительно оси B:
- множество подшипников 180, радиально расположенных между управляющим стержнем 155 и колонкой 152;
- подшипники 181, радиально расположенные между колонкой 152 и радиально внутренней поверхностью кожуха 150; и
- подшипники 183, радиально расположенные между радиально внешней поверхностью кожуха 150 и соответствующими дисками 167, 170.
Работа винта 4 подобна винту 3 и описана только в той части, в которой она отличается от работы винта 3.
В частности, концевой вал 157 дополнительной трансмиссионной группы 8 приводит во вращение коническую шестерню 152 вокруг оси B со скоростью ω2 вращения. Соответственно, также втулка 152 и лопасти 154 и электрическая цепь 169 приводятся во вращение вокруг оси B со скоростью ω2 вращения. Лопасти 154 приводятся во вращение втулкой 152 вокруг оси B и могут перемещаться относительно втулки 152 известным образом. Более того, углы тангажа относительно соответствующих осей D лопастей 154 могут регулироваться посредством скользящего перемещения управляющего стержня 155 вдоль оси B.
Источник 163 и постоянные магниты 164 установлены на кожухе 150 и являются неподвижными вокруг оси B, т.е. источник 163 и постоянные магниты 164 могут рассматриваться как вращающиеся со скоростью ω1=0 вращения вокруг оси B. Постоянные магниты 164 генерируют магнитное поле BS. Благодаря различной скорости вращения между электрической цепью 169 и источником 163 электродвижущая сила emfR индуцируется магнитным полем, при помощи закона Фарадея, в электрической цепи 169, вращающейся за одно целое с втулкой 152.
Как показано на Фиг. 5, будучи электрическими токами iR, переменными во времени, они генерируют магнитное поле BR, которое является переменным во времени.
Переменное во времени магнитное поле BR индуцирует, при помощи закона Фарадея, обратную электродвижущую силу bemfC в электрической цепи 65.
Датчик 58 воспринимает напряжение VC в электрической цепи 65.
На Фиг. 6 ссылочная позиция 4' обозначает, в целом, хвостовой винт согласно третьему варианту выполнения настоящего изобретения.
Винт 4' подобен винту 4 и будет описан ниже только в части, в которой он отличается от него; соответствующие или эквивалентные части винтов 4, 4' будут обозначены там, где это возможно, одинаковыми ссылочными позициями.
В частности, винт 4' отличается от винта 4 тем, что источник 163 содержит, вместо разнесенных постоянных магнитов 164, электрическую цепь 70, которая генерирует магнитное поле BS, направленное вдоль оси B. Электрическая цепь 70 электромагнитно связана с электрической цепью 169. Электрическая цепь 70 содержит генератор 71 напряжения, генерирующий напряжение VS, и имеет эквивалентные электрическое сопротивление RS и индуктивность LS, которые на Фиг. 6 смоделированы с помощью резистора и индуктора соответственно. Генератор 71 напряжения вызывает поток электрического тока iS внутри электрической цепи 70. Электрический ток iS генерирует, в свою очередь, магнитное поле BS. Предпочтительно, генератор 71 напряжения представляет собой генератор постоянного напряжения. Более того, на Фиг. 6 обратная электродвижущая сила bemfS, воздействующая на электрическую цепь 70, смоделирована с помощью генератора переменного напряжения. Датчик 58 представляет собой датчик напряжения и выполнен с возможностью обнаружения напряжения VС в электрической цепи 70.
Работа винта 4' подобна винту 4 и описана только в той части, в которой она отличается от работы винта 4. В частности, работа винта 4' отличается от винта 4 тем, что магнитное поле BS генерируется электрической цепью 70 кожуха 150, и тем, что обратная электродвижущая сила bemfS индуцируется магнитным полем BR в электрической цепи 70.
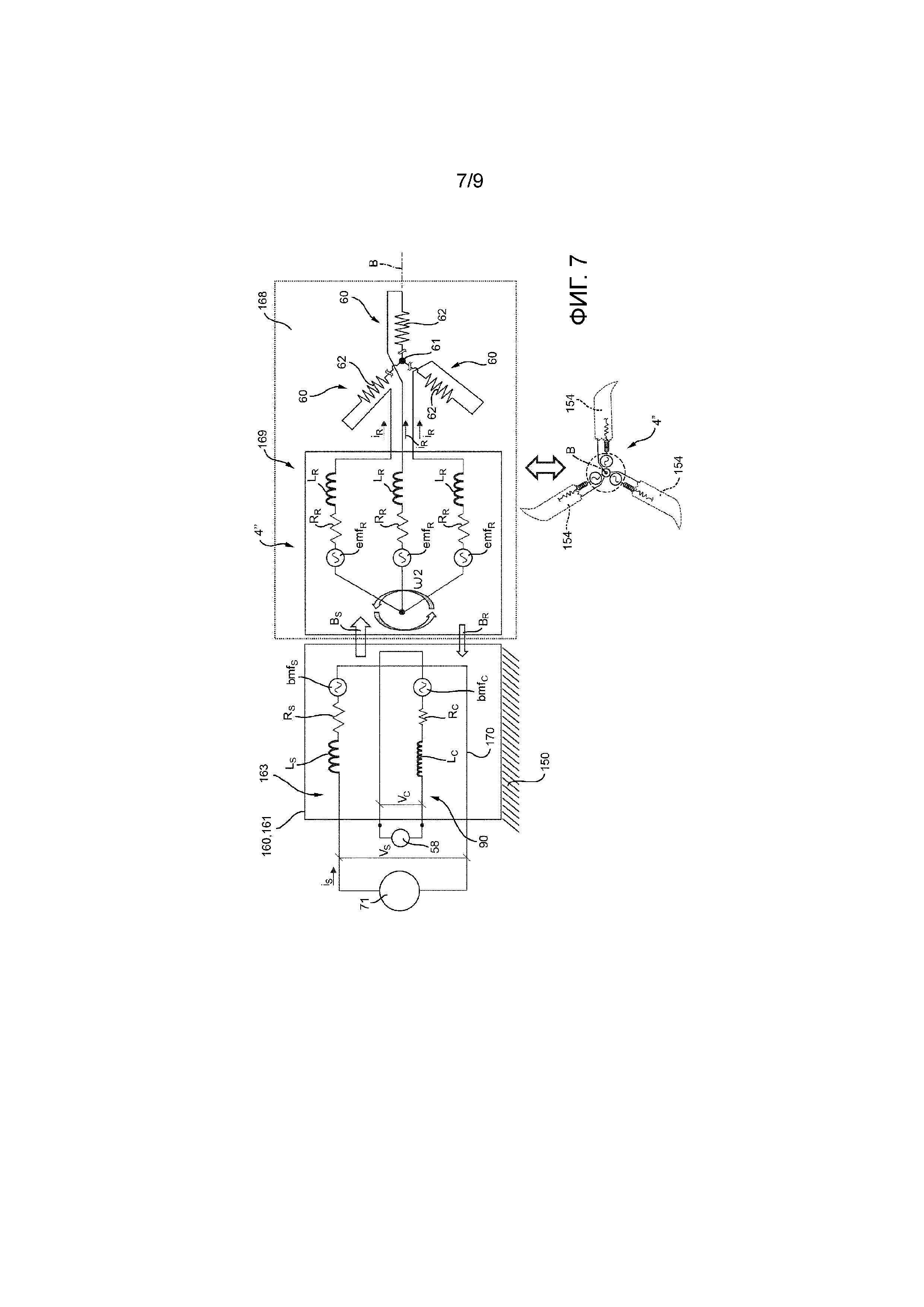
На Фиг. 7 ссылочная позиция 4'' обозначает, в целом, хвостовой винт согласно четвертому варианту выполнения настоящего изобретения. Винт 4'' подобен винту 4 и будет описан ниже только в той части, в которой он отличается от него; соответствующие или эквивалентные части винта 4, 4'' будут обозначены там, где это возможно, одинаковыми ссылочными позициями. В частности, винт 4'' отличается от винта 4' содержанием, в дополнение к электрической цепи 70, электрической цепи 90. Электрическая цепь 90 электромагнитно связана с электрической цепью 169. Электрическая цепь 90 представляет собой в показанном варианте выполнения открытую катушку 170, которая электромагнитно связана с электрической цепью 169. Электрическая цепь 90 имеет эквивалентные электрическое сопротивление RC и индуктивность LC, которые на Фиг. 7 смоделированы с помощью резистора и индуктора соответственно. Более того, на Фиг. 6 обратная электродвижущая сила bemfC, воздействующая на катушку 170, смоделирована с помощью генератора переменного напряжения. Датчик 58 представляет собой датчик напряжения и выполнен с возможностью обнаружения напряжения VC в электрической цепи 90.
Работа винта 4'' подобна винту 4 и описана только в той части, в которой она отличается от работы винта 4. В частности, работа винта 4'' отличается от работы винта 4 тем, что обратная электродвижущая сила bemfC индуцируется магнитным полем BR в электрической цепи 90.
Преимущества винта 3, 4, 4', 4'' и способа согласно настоящему изобретению будут ясны из вышеприведенного описания.
В частности, винт 3, 4, 4', 4'' содержит датчик 58, который генерирует сигнал, связанный с обратной электродвижущей силой bemfC, bemfS, индуцируемой в электрической цепи 65, 70, 90 переменным током iR, текущим внутри электрической цепи 32.
Этот сигнал позволяет распознавать некоторые признаки временного изменения iR, которые связаны с некоторыми рабочими конфигурациями нагрузок 62 и обмоток 68.
В частности:
- в случае, если электрический ток iR является нулевым, у нагрузок 62 отсутствует электропитание и, например, антиобледенительная система не работает;
- в случае, если электрический ток iR ниже, чем максимальное значение, в одной или некоторых из обмоток 68 имеется неисправность; и
- в случае, если пиковое значение электрического тока iR выше, чем максимальное значение, имеется короткое замыкание обмоток 68, электрически соединенных с одной и той же нагрузкой 62.
В связи с этим возможно распознавать потенциальную опасность для винта 3, 4, 4', 4'', как, например, тот факт, что антиобледенительная система не работает, или наличие коротких замыканий обмоток 68, которые могут приводить к превышению крутящего момента, воздействующего на колонку 11 и втулку 12.
Более того (Фиг. 10 и 11), переключатели 69, расположенные между каждой нагрузкой 62 и соответствующими обмотками 68, позволяют исключать одну из обмоток 68 в случае ее неправильной работы.
Переключатели 65, расположенные между узлом 61 и соответствующей нагрузкой 62, позволяют исключать обе соответствующие обмотки 68 в случае их короткого замыкания. Таким образом, сигнал, генерируемый датчиком 58, обеспечивает высокорелевантную информацию о рабочем статусе нагрузок 62 и в связи с этим о соответствующих вспомогательных компонентах, не требуя никакого физического соединения между поддерживающим элементом 36 или кожухом 150 и втулкой 11. Эта информация может быть обеспечена внутри фюзеляжа 2.
Что касается винта 3, показанного на Фиг. 3 и 4, электрическая цепь 65 установлена на статоре 10. Таким образом, даже если постоянные магниты 81 выполнены за одно целое под углом с поддерживающим элементом 36, вращающимся со скоростью ω1 вращения, сигнал, обеспечиваемый датчиком 58, доступен в статоре 10 и в связи с этим в фюзеляже 2 вертолета 1. Соответственно, винт 3 позволяет увеличивать дифференциальную скорость ω2-ω1 вращения между электропроводящим элементом 32 и источником 30 магнитного поля с уменьшенным осевым размером. Таким образом, поддерживающий элемент 32 и втулка 12 могут быть выполнены более маленькими и более легкими, поскольку чем выше дифференциальная скорость ω2-ω1 вращения, тем ниже крутящий момент, требуемый для заданного значения электродвижущей силы, индуцируемой в электропроводящем элементе 32. Чем меньше крутящий момент, тем меньше диаметр и в связи с этим вес поддерживающего элемента 32 и втулки 12 с очевидными преимуществами по целевой нагрузке. Это особенно предпочтительно, когда скорость ω2 вращения втулки 12 является в силу необходимости медленной, как в несущем винте 3.
Более того, электрический генератор, образованный источником 30, 163 и электрической цепью 32, 169, а также электрическая цепь 65, 70, 90 и датчик 58 имеют ограниченный осевой размер и могут быть в связи с этим легко интегрированы в традиционный размер винта 3, 4, 4', 4'', не требуя никакого его переконструирования.
По этим же причинам электрический генератор, образованный источником 30, 163 и электропроводящим элементом 32, 169, может быть легко модернизирован внутри уже существующего винта 3, 4, 4', 4''.
Разумеется, могут быть выполнены изменения винта 3, 4, 4', 4'' и способа согласно настоящему изобретению без, однако, отклонения от объема охраны, который определен в сопровождающей формуле изобретения.
В частности, электрический генератор, образованный источником 30, 163 и электрической цепью 32, 169, может представлять собой машину с радиальным потоком, в которой магнитное поле, генерируемое источником 30, в основном направляется радиально оси А, B.
Более того, электрическая цепь 65 винта 3 может быть расположена на поддерживающем элементе 36 и вращаться со скоростью ω1 вращения вокруг оси A.
Источник 30 магнитного поля BS в винте 3 может представлять собой, вместо постоянных магнитов 81, электрическую цепь, подобную электрической цепи 70 винта 4', и быть расположен на поддерживающем элементе 36.
Винт 3, 4, 4', 4'' может содержать, вместо механической основной и дополнительной трансмиссионных групп 7, 8, электрический двигатель для приведения в движение винта 3, 4, 4', 4''. В этом случае винт 3, 4, 4', 4'' будет содержать статор, на котором будет установлен источник 30, 163, и винт, на котором будет установлена электрическая цепь 32, 169.
Летательный аппарат 1 может представлять собой конвертоплан вместо вертолета.
Летательный аппарат 1 может содержать винт 3, 4, 4', 4'' в соответствии с изобретением и традиционный противодействующий крутящему моменту хвостовой винт или традиционный несущий винт и противодействующий крутящему моменту хвостовой винт 4 в соответствии с изобретением.
Реферат
Изобретение относится к области авиации, в частности к конструкциям воздушных винтов. Винт (3, 4, 4', 4'') летательного аппарата (1), способного к зависанию, содержит статор (10, 150), вращаемый элемент (11, 151), вращающийся вокруг оси статора (10, 150), лопасть (13; 154), поддерживающий элемент (36; 161), который поддерживает источник (30) магнитного поля (B) и либо является неподвижным, либо приводится во вращение с первой скоростью (ω1) вращения, и первую электрическую цепь (32, 169), которая может быть приведена во вращение со второй скоростью (ω2) вращения. Первая электрическая цепь (32, 169) электромагнитно связана с источником (30, 163) так, что электродвижущая сила (emf) индуцируется магнитным полем в первой электрической цепи (32, 16). Винт (3, 4, 4', 4'') дополнительно содержит вторую электрическую цепь (65; 70; 90), которая либо является неподвижной, либо приводится во вращение с первой скоростью (ω1) вращения, и датчик (58), генерирующий сигнал (V), связанный с обратной электродвижущей силой (bemf, bemf), индуцируемой во второй электрической цепи (65; 70; 90). Обеспечивается возможность снабжения электроэнергией вращающихся компонентов несущего и хвостового винтов. 3 н. и 12 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Электроснабжение для устройств, поддерживаемых ротором авиационного двигателя
Комментарии