Устройство магнитной левитации и поперечной стабилизации на постоянных магнитах - RU2683122C1
Код документа: RU2683122C1
Чертежи

Описание
Изобретение относится к области магнитолевитационной транспортной технологии, а именно к конструкции устройства магнитной левитации и поперечной стабилизации на постоянных магнитах. Устройство магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах содержит транспортный путь в виде канала, на боковых стенах канала установлены магниты в виде «массива Хальбаха», вдоль пути на всем протяжении, статор линейного двигателя, левитирующая платформа в свою очередь содержащая постоянный магнит в сборке «массива Хальбаха» установленный на боковых стенах платформы, постоянные магниты ротора линейного двигателя.
В результате обеспечивается магнитная левитация и боковая стабилизация.
Известно устройство магнитной левитации транспортного средства, это система SCMaglev (Эс-Си-Маглев, сокр. от "сверхпроводимый маглев") - технология и система поездов на магнитной подушке, разработанная японской железнодорожной компанией Central Japan Railway Company и Исследовательским институтом железнодорожных технологий в Токио (Railway Technical Research Institute). Система использует электродинамическую подвеску на сверхпроводящих магнитах (EDS), установленных как на поезде, так и на трассе, поезда SCMaglev движутся в канале между сверхпроводящими магнитами и разгоняются за счет линейного двигателя, установленного на боковых стенах канала. Такая схема позволяет развивать большие скорости, обеспечивает простоту и большую безопасность пассажиров в случае эвакуации. Кроме того, поезда SCMaglev оснащены колесами и на малой скорости (до 150 км/ч) разгоняются по бетонной подушке, а при достижении больших скоростей поднимаются над поверхностью на несколько сантиметров. Для торможения на большой скорости используются электродинамические и аэродинамические тормоза. Их скорость, фактически, ограничена только сопротивлением воздуха.
Эта система имеет недостатки, левитация на малых скоростях прекращается, при отключении электрического тока от пути левитация и поперечная устойчивость отключаются для поддержки левитирующей платформы используются колеса и боковые ролики.
Изобретений направлено на устранение этих недостатков, левитация и боковая устойчивость обеспечивается на стоянке и на скорости без электрического тока, без колес и боковых роликов.
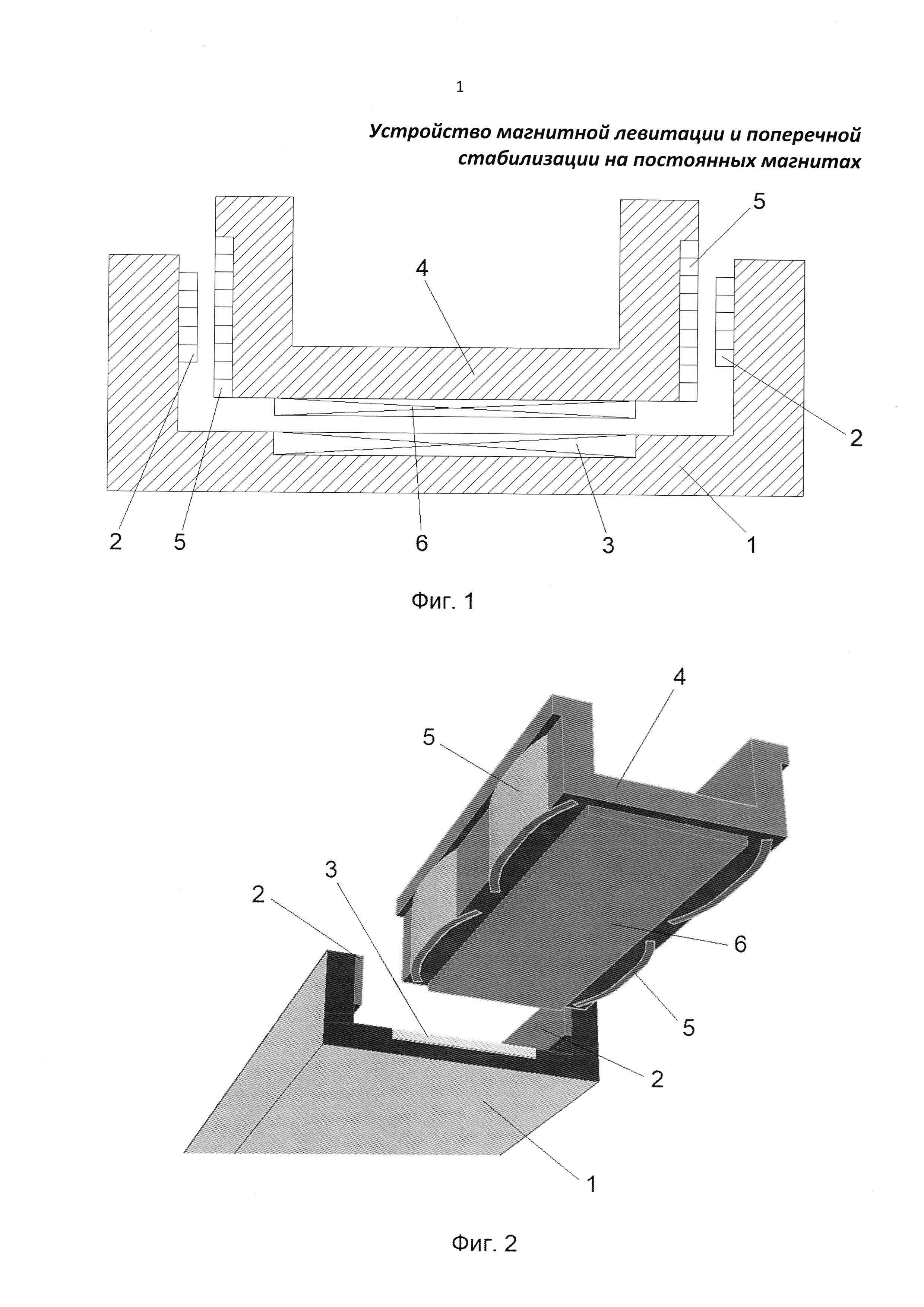
Техническое решение достигается посредством устройства магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах содержащее транспортный путь 1 (фиг. 1 и фиг. 2) в виде П-образного канала, на боковых стенах канала вертикально относительно пути 1 вдоль на всем протяжении установлены постоянные магниты 2 в виде «массива Хальбаха», статор 3 линейного двигателя, левитирующую платформу 4 которая в свою очередь содержит постоянный магнит 5 в сборке «массива Хальбаха» установленный на боковых стенах платформы 4, постоянные магниты 6 ротора линейного двигателя.
1. Устройство магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах содержит транспортный путь 1 (фиг. 1 и фиг. 2) в виде канала, на боковых стенах канала установлены магниты 2 в виде «массива Хальбаха», вдоль пути 1 на всем протяжении, статор 3 линейного двигателя, левитирующую платформу 4, которая в свою очередь содержит постоянный магнит 5 в виде «массива Хальбаха» установленный на боковых стенах платформы 4, постоянные магниты ротора 6 линейного двигателя, отличается тем, что бортовой магнит 5 шире постоянного магнита 2 установленного на пути 1 и постоянный магнит 5 (фиг. 3) в сборке «массива Хальбаха» может иметь следующие формы: вариант-А раздельные с закругленными краями, вариант Б в виде замкнутой восьмерки, вариант-В в виде ноля, вариант-Г в виде ноля разрезанного пополам, вид сверху.
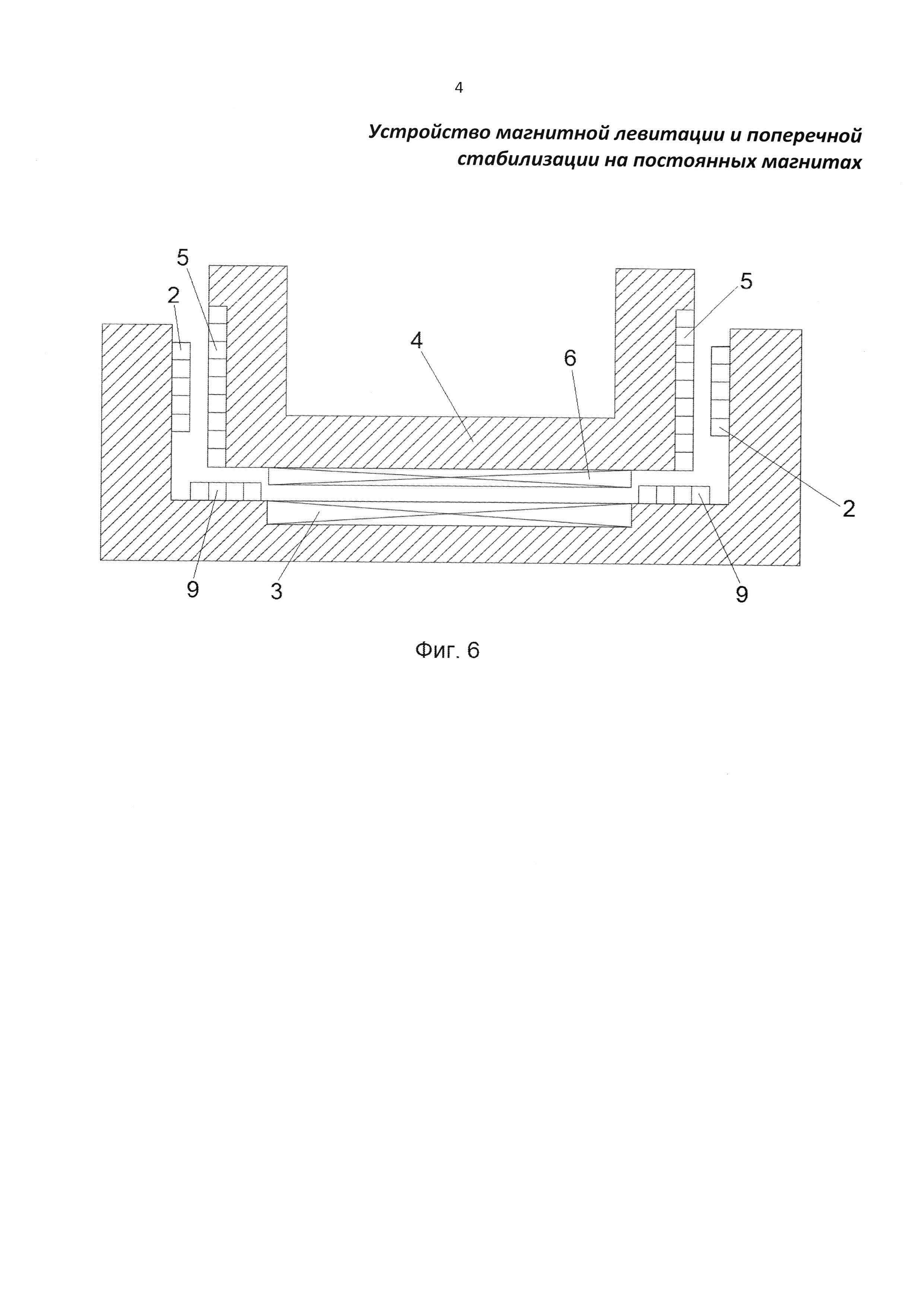
2. Устройство магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах содержит транспортный путь 1 (фиг. 1 и фиг. 2) в виде канала, на боковых стенах канала установлены магниты 2 в виде «массива Хальбаха», вдоль пути 1 на всем протяжении, статор 3 линейного двигателя, левитирующую платформу 4, которая в свою очередь содержит постоянный магнит 5 в виде «массива Хальбаха» установленный на боковых стенах платформы 4, постоянные магниты ротора 6 линейного двигателя, отличается тем, что для большей нагрузки на левитирующую платформу 4 (фиг. 6) внизу под магнитом 5 на нижнем углублении канала на всем протяжении вдоль на пути установлены постоянные магниты 9 в сборке «массива Хальбаха» под магнитом 5, магнит 9 взаимодействуя с постоянным магнитом 5, т.е. сильным полем, создают дополнительную магнитную подушку для повышения грузоподъемности платформы 4.
Сущность заявленного технического решения поясняется фигурами 1-6 где:
на фиг. 1 представлен поперечный разрез транспортного пути и левитирующей платформы.
на фиг. 2 изображен в изометрии транспортный путь с левитирующей платформой.
на фиг. 3 представлен вид сверху, вариантов сборки «массива Хальбаха» или альтернативной сборки на платформе, без изображения платформы.
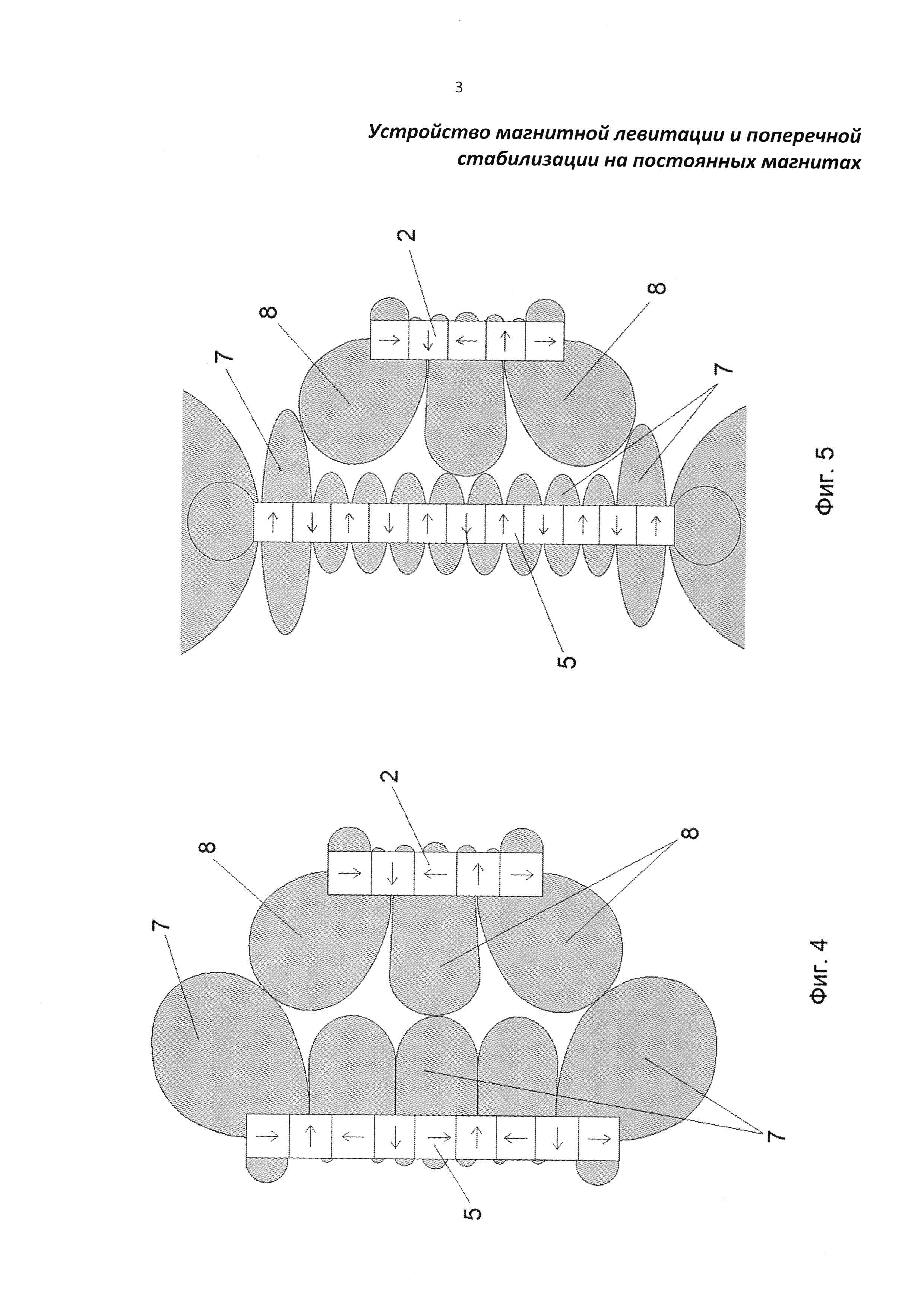
на фиг. 4 на поперечном разрезе изображены магниты в сборке «массива Хальбаха» и схема взаимодействия их магнитных полей, поля заретушированы, стрелками указаны направления полярности магнитов.
на фиг. 5 на поперечном разрезе изображены магниты в сборке альтернативного массива и схема взаимодействия магнитных полей, поля заретушированы.
на фиг. 6 представлен поперечный разрез транспортного пути и левитирующей платформы с увиливающим левитирующую мощность магнитом.
Техническое решение достигается посредством устройства магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах, содержащее транспортный путь 1 (фиг. 1 и фиг. 2) в виде канала, на боковых стенах канала установлены магниты 2 в виде «массива Хальбаха», вдоль пути 1 на всем протяжении, статор 3 линейного двигателя, левитирующую платформу 4 в свою очередь содержащую постоянный магнит 5 в виде «массива Хальбаха» установленный на боковых стенах платформы 4, постоянные магниты ротора 6 линейного двигателя. Чем длиннее сборка «массива Хальбаха», тем больше на краях магнитное поле, в виду того что сборка постоянных магнитов 5 (фиг. 4) в виде «массива Хальбаха» имеет на краях магнитное поле 7 больше чем в других местах, образуется «седло» для магнитного поля 8 более узкого постоянного магнита 2.
В виду того что магнит 5 (фиг. 2) шире магнита 2 и имеет закругленные края, то более сильное магнитное поле 7 (фиг. 4 и фиг. 5) на закругленном конце не взаимодействует с более сильным полем 8 магнита 2 в связи с большой удаленностью или магниты 5 (фиг. 3) в сборках массивов вариант Б и вариант В, где массив замкнут и магнитные поля большей мощности расположены только на двух краях, относительно платформы 4 (фиг. 1 и фиг. 2) вверху и внизу. Если край не скруглять или не делать массив замкнутым, то будет четыре более сильных поля на краях массива, что не даст создать вдоль магнита 5 платформы 4 продольную канавку из магнитного поля («седло»), в этом случае «седло» будет строго по центру массива и магнитное поле не даст двигаться меньшему магниту 2 не водном направлении.
Работает устройство магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах следующим образом. Более широкий магнит 5 (фиг. 4) создает магнитное поле 7 в виде «седла» в которое помещается магнитное поле 8 более узкого магнита 2. Магнитные поля 7 и 8 упираются друг в друга создавая вертикальную левитацию (поперечную устойчивость), а большие поля упираясь друг в друга создают горизонтальную устойчивость. Создается сразу вертикальная и горизонтальная левитация, конструкция не нуждается в колесах и боковых роликах не на стоянке, не на малой скорости. На постоянном магните 5 (фиг. 5) можно создать «седло» для магнитного поля магнита 2 в виде альтернативной сборки массива, когда магниты расположены друг к другу по одной линии разными полюсами. «Седло» из магнитного поля можно обеспечить конфигурацией магнитов в массиве, а также повышением мощности магнитов от центра к караю массива.
Чтобы увеличить нагрузку под магнитом 5 (фиг. 6) установлен на пути 1 вдоль на всем протяжении постоянный магнит 9 в сборке «массива Хальбаха» взаимодействуя с большим магнитным полем магнита 5, создает дополнительную магнитную подушку (горизонтальную левитацию). Конструкцию можно использовать для пассажирских и грузовых транспортных перевозок с самолетной скоростью.
Реферат
Изобретение относится к левитационным устройствам для транспортных средств. Устройство магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах содержит транспортный путь в виде канала, статор линейного двигателя и левитирующую платформу. На боковых стенах канала установлены магниты в виде «массива Хальбаха», вдоль пути на всем протяжении. Левитирующая платформа содержит постоянный магнит в виде «массива Хальбаха», установленный на боковых стенах платформы, и постоянные магниты ротора линейного двигателя. При этом бортовой магнит шире постоянного магнита, установленного на транспортном пути, и бортовой магнит закруглен с двух сторон в центр левитирующей платформы и имеет замкнутую форму в виде ноля или восьмерки. Технический результат заключается в обеспечении левитации транспортного средства без электрического тока как на стоянке, так и при движении на скорости. 1 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Магнитный полюс из постоянных магнитов на базе редкоземельных металлов магнитолевитационного транспортного средства
Транспортная система
Комментарии