Гидростатический привод - RU2553618C2
Код документа: RU2553618C2
Чертежи
Описание
Изобретение относится к гидростатическому приводу с подающим цилиндром, содержащим корпус и с возможностью осевого перемещения в корпусе, наполненной рабочей средой камерой сжатия с нагружаемым давлением поршнем, с преобразующей вращательное движение в осевое движение планетарной обкатной передачей с втулкой, со шпинделем передачи и перекатывающимися между ними планетарными телами качения, а также с электромотором, приводящим в движение планетарную обкатную передачу, с присоединенным жестко к корпусу статором и с возможностью поворота относительно него ротором.
Соответствующий такому типу гидростатический привод известен из документа DE 19700935 А1. В указанном документе поршень подающего цилиндра приводится в движение посредством электромотора, причем вращательное движение электромотора преобразуется посредством передачи в виде червячной передачи в осевое движение. При этом поршень приводится в движение посредством расположенного на червячной шестерне эксцентрикового пальца.
Кроме того, из документа ЕР 0320621 А1, по существу, известна планетарная обкатная передача, имеющая шпиндель с винтовой резьбой, с расположенной соосно к нему втулкой и перекатывающимися между ними планетарными колесами. Планетарная передача приводится во вращательное движение электромотором и переводит быстрое вращательное движение в замедленное осевое движение.
В этом отношении задача изобретения состоит в улучшении и усовершенствовании предпочтительно используемых в автомобилях гидростатических приводов, в частности, в плане повышения коэффициента полезного действия, уменьшения требований к конструктивному пространству и повышения рабочего давления подающего цилиндра.
Задача решается при помощи гидростатического привода с подающим цилиндром, содержащим корпус и с возможностью осевого перемещения в корпусе, наполненной рабочей средой камерой сжатия с нагружаемым давлением поршнем, с преобразующей вращательное движение в осевое движение планетарной обкатной передачей со втулкой, со шпинделем передачи и перекатывающимися между ними планетарными телами качения, а также с электромотором, приводящим в движение планетарную обкатную передачу, с присоединенным жестко к корпусу статором и с возможностью поворота относительно него ротором, причем камера сжатия выполнена кольцеобразно, а планетарная обкатная передача расположена радиально внутри камеры сжатия. Благодаря этому получают укороченную по оси конструкцию. Альтернативно к такому выполнению также могло бы быть предусмотрено, что планетарная обкатная передача расположена в роторе электромотора. Данное предложенное размещение планетарной обкатной передачи радиально внутри камеры сжатия имеет преимущество по сравнению с этим альтернативным выполнением в том, что предложен гидростатический привод с небольшим диаметром. При этом исходят из соображений, что альтернативное последовательно вкладываемое выполнение с ротором и планетарной обкатной передачей требует большего конструктивного пространства, чем данное предусмотренное последовательно вкладываемое выполнение планетарной обкатной передачи и подающего цилиндра, в частности, если втулка планетарной обкатной передачи, по существу, соответствует длине хода поршня.
При этом, кроме того, предпочтительно, что электромотор и планетарная передача расположены соосно, на некотором расстоянии друг от друга по оси. Таким образом, можно согласовывать диаметр электромотора с диаметром подающего цилиндра, так чтобы он был одинаковым или меньше диаметра подающего цилиндра. При расположении втулки радиально внутри кольцеобразной камеры сжатия предоставляемую ротору внутреннюю полость можно выполнять небольшой, а электромотор, при заданном диаметре, рассчитывать сравнительно мощным. Так как часть поверхности камеры сжатия, расположенной радиально снаружи на корпусе подающего цилиндра, только ненамного меньше, по сравнению с полной поверхностью с небольшой радиальной внутренней частью поверхности, то расположенное радиально внутри нее конструктивное пространство можно использовать для втулки.
Гидростатический привод подходит для его использования в качестве управляемого блоком управления датчика для подготовки задаваемого давления через напорный патрубок в камере сжатия и в напорном трубопроводе для потребителя - для осевого перемещения элементов, например, рабочего цилиндра фрикционной передачи, расположенной в трансмиссии автомобиля или зажатой в ней, например, расположенной между двигателем внутреннего сгорания и коробкой передач; расположенного в коробке передач вала механизма переключения передач или распределительного вала для переключения скоростей, тормозного цилиндра для приведения в действие тормозов и подобных элементов.
При этом может быть предпочтительно, если корпус подающего цилиндра и корпус электромотора выполнены неразъемными при их изготовлении, например, посредством способа отливки - литьем под давлением, например при применении алюминия или других легких металлов и их сплавов, или формовании литьем под давлением, например, при применении полимерного материала. При неразъемном выполнении корпуса уменьшается число деталей и повышается прочность обоих корпусов с опирающимся в корпусе поршнем между подающим цилиндром и электромотором, в частности при нагрузке камеры сжатия давлением.
При этом оказалось предпочтительно, если, например, в разгруженном положении поршня при потере рабочей среды в гидравлической системе между подающим цилиндром, напорным трубопроводом и рабочим цилиндром или при температурных колебаниях между камерой сжатия и резервуаром, резервуар для запаса рабочей среды будет заменен на другой, интегрированный в гидростатический привод, без существенного увеличения конструктивного пространства. Например, при заданном диаметре электромотора можно подгонять диаметр подающего цилиндра к диаметру электромотора, причем резервуар предусматривают в кольцевой полости радиально снаружи камеры сжатия. При этом кольцевая полость может быть разрезана расположенным вдоль оси вращения полым цилиндром, в котором может быть предусмотрено соединение для отдельного и/или другого резервуара, например, на случай неблагоприятного наклона гидростатического привода при размещении в автомобиле или сильфон для выравнивания давления с внешней средой, для выравнивания разницы давления между резервуаром, а вместе с ним также и камерой сжатия с внешней средой в ненагруженном положении.
Оказалось особенно предпочтительным, для находящейся на одной оси на некотором расстоянии от электромотора втулки планетарной обкатной передачи, если втулка установлена устойчиво к повороту и с возможностью осевого перемещения неподвижно с корпусом, а поршень приводится в движение втулкой. При этом втулка может направляться в корпусе вдоль и соединяться с поршнем устойчиво к повороту. Вследствие этого выдающийся вперед относительно осевого конструктивного пространства шпиндель передачи приводится в движение электромотором и остается неподвижным в своем осевом положении, поэтому он может продолжаться, например, через все осевое конструктивное пространство и может устанавливаться и фиксироваться по оси на обеих торцевых сторонах гидростатического привода. При этом длину гидростатического привода можно рассчитывать на шпиндель с винтовой резьбой без длины хода, при этом длина хода втулки идентична длине хода поршня, поэтому также при осевом перемещении втулки не увеличивается осевое конструктивное пространство и можно предложить компактно выполненный гидростатический привод.
Для того чтобы рассчитать, с одной стороны, электромотор в качестве переключаемого электроникой двигателя, а с другой стороны, возможность давлением, например, при применении полимерного материала. При неразъемном выполнении корпуса уменьшается число изделий и повышается прочность обоих корпусов вследствие опоры поршня в корпусе между подающим цилиндром и электромотором при нагрузке камеры сжатия давлением.
При этом оказалось предпочтительно, если, например, в разгруженном положении поршня при потере рабочей среды в гидравлической системе между подающим цилиндром, напорным трубопроводом и рабочим цилиндром или при температурных колебаниях между камерой сжатия и резервуаром, резервуар для запаса рабочей среды будет заменен на другой, интегрированный в гидростатический привод, без существенного увеличения конструктивного пространства. Например, при заданном диаметре электромотора можно подгонять диаметр подающего цилиндра к диаметру электромотора, причем резервуар предусматривают в кольцевой полости радиально снаружи камеры сжатия. При этом кольцевая полость может быть разрезана расположенным вдоль оси вращения полым цилиндром, в котором может быть предусмотрено соединение для отдельного и/или другого резервуара, например, на случай неблагоприятного наклона гидростатического привода при размещении в автомобиле или сильфон для выравнивания давления с внешней средой, для выравнивания разницы давления между резервуаром, а вместе с ним также и камерой сжатия с внешней средой в ненагруженном положении.
Оказалось особенно предпочтительным, для находящейся на одной оси на некотором расстоянии от электромотора втулки планетарной обкатной передачи, если втулка установлена устойчиво к повороту и с возможностью осевого перемещения неподвижно с корпусом, а поршень приводится в движение втулкой. При этом втулка может направляться в корпусе вдоль и соединяться с поршнем устойчиво к повороту. Вследствие этого выдающийся вперед относительно осевого конструктивного пространства шпиндель передачи приводится в движение электромотором и остается неподвижным в своем осевом положении, поэтому он может продолжаться, например, через все осевое конструктивное пространство и может устанавливаться и фиксироваться по оси на обеих торцевых сторонах гидростатического привода. При этом длину гидростатического привода можно рассчитывать на шпиндель с винтовой резьбой без длины хода, при этом длина хода втулки идентична длине хода поршня, поэтому также при осевом перемещении втулки не увеличивается осевое конструктивное пространство и можно предложить компактно выполненный гидростатический привод.
Для того чтобы рассчитать, с одной стороны, электромотор в качестве переключаемого электроникой двигателя, а с другой стороны, возможность контролировать вращательное движение шпинделя передачи, в гидростатическом приводе предусмотрено сенсорное устройство, регистрирующее, по меньшей мере, вращательное движение шпинделя передачи. При этом сенсорное устройство может содержать датчики, регистрирующие в качестве датчиков Холла аналоговый угол или в качестве датчика вращения количество магнитных импульсов на угол поворота шпинделя передачи, причем угол определяют по количеству зарегистрированных магнитных импульсов. Для калибровки датчиков вращения на определенное начало отсчета, такого как угол рассогласования, можно осуществлять подходящие мероприятия, например, предусматривать упор, распознаваемый электронным устройством управления. При этом датчики Холла выполняют из предпочтительно расположенного неподвижно на корпусе, вследствие лучшей возможности разводки проводов, сенсорного элемента и одного или нескольких сенсорных магнитов, расположенных для этого на подвижном конструктивном элементе. Вследствие этого становится возможным в соответствии с количеством распределенных по окружности шпинделя передачи сенсорных магнитов и соответственно из выполненных из них магнитных сегментов, генерирующих магнитные импульсы, получать достаточные дискреты углового перемещения угла поворота шпинделя передачи.
По причинам электрической и соответственно электронной чувствительности к помехам оказалась предпочтительно, если на печатной плате предварительного электронного блока расположен, по меньшей мере, один датчик для регистрации параметров режима работы гидростатического привода. При этом печатная плата может быть расположена непосредственно в месте оптимального размещения датчика или, если на этом участке нет в распоряжении такого конструктивного пространства, то на участок установленной платы вводят неэлектронные параметры для распознавания сигнала, например механические или внутренние физические параметры.
Альтернативно или дополнительно для регистрации угла поворота шпинделя передачи оказалось предпочтительным определять длину хода втулки и соответственно поршня, например, посредством датчика Холла. Для этого соответствующий датчик может быть предусмотрен непосредственно на участке между корпусом и поршнем или втулкой, причем провода проводят в корпус к имеющемуся в данном случае предварительному электронному блоку для преобразования сигнала или из корпуса. Однако оказалась, в частности, предпочтительно, по причине более незначительной электромагнитной чувствительности к помехам такого датчика, если для пространственно отдаленного предварительного электронного блока, в частности из-за конструктивного пространства, размещать датчик рядом с предварительным электронным блоком или в нем и передавать датчику движение поршня или втулки посредством рычага. В частности, по регистрации сигналов угла поворота шпинделя передачи и осевого перемещения поршня можно определять и компенсировать имеющееся в данном случае проскальзывание планетарной обкатной передачи.
Для альтернативного или избыточного определения действия поршня на камеру сжатия давление камеры сжатия можно регистрировать посредством датчика давления. Также для возможности регистрации давления непосредственно датчиком давления, расположенного на пространственно удаленной от камеры сжатия печатной плате предварительного электронного блока, в корпусе, в частности, в неразъемном корпусе подающего цилиндра и электромотора может быть предусмотрено присоединительное сверление к камере сжатия, продолжающееся вплоть до предварительного электронного блока. Согласно изобретению предварительный электронный блок можно предусматривать на отвернутой от подающего цилиндра стороне корпуса электромотора или размещать его в ненужном свободном пространстве корпуса или корпуса гидростатического привода. При этом оказался предпочтительно, если предварительный электронный блок расположен на участке крышки или в крышке, закрывающей корпус электромотора монтажа и установленные с этой стороны элементы после их монтажа. При этом в крышке или в корпусе может быть предусмотрено разъемное соединение с блоком управления.
Настоящее изобретение поясняется чертежами, на которых представлено следующее:
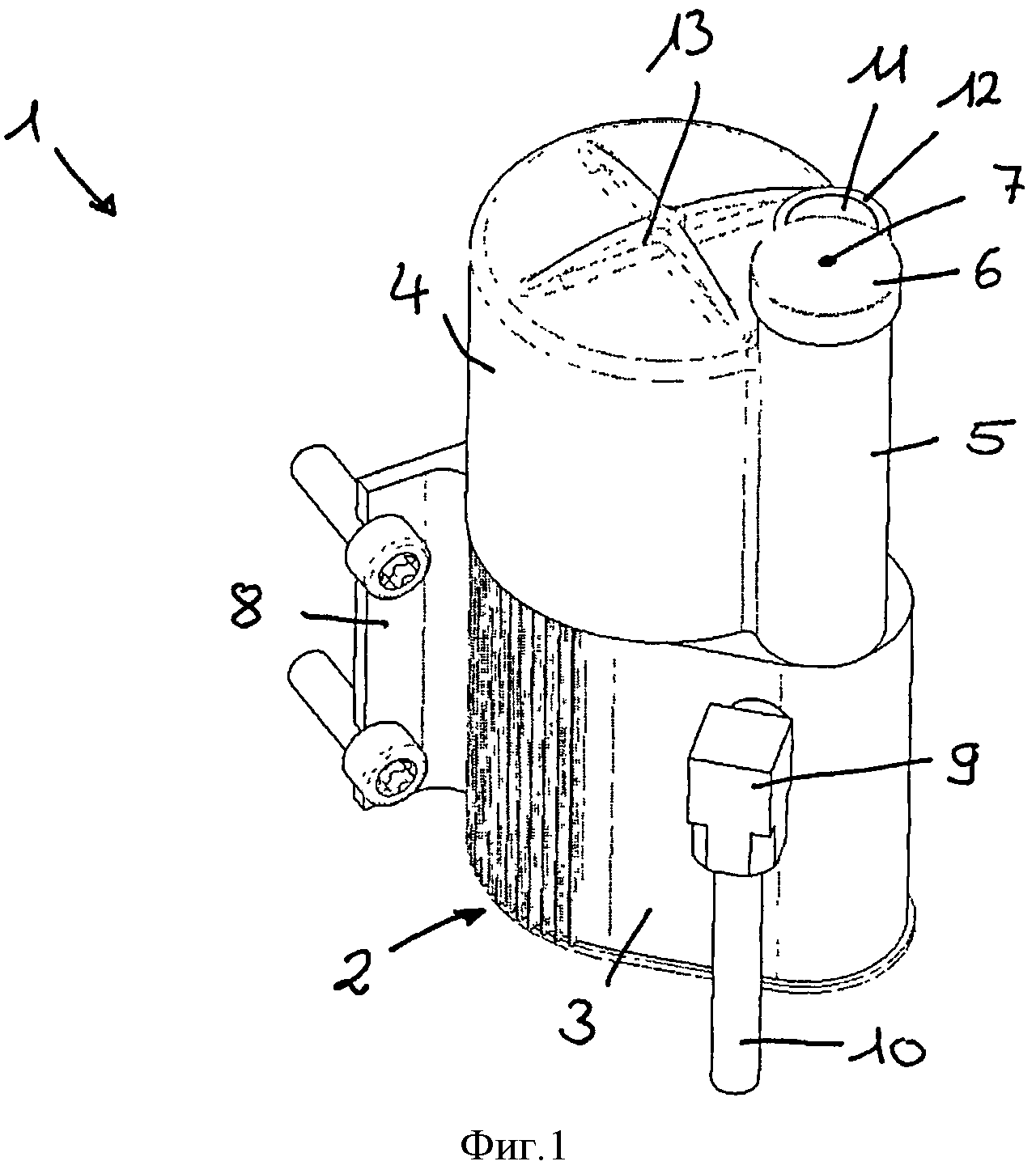
фиг.1 - гидростатический привод, согласно изобретению;
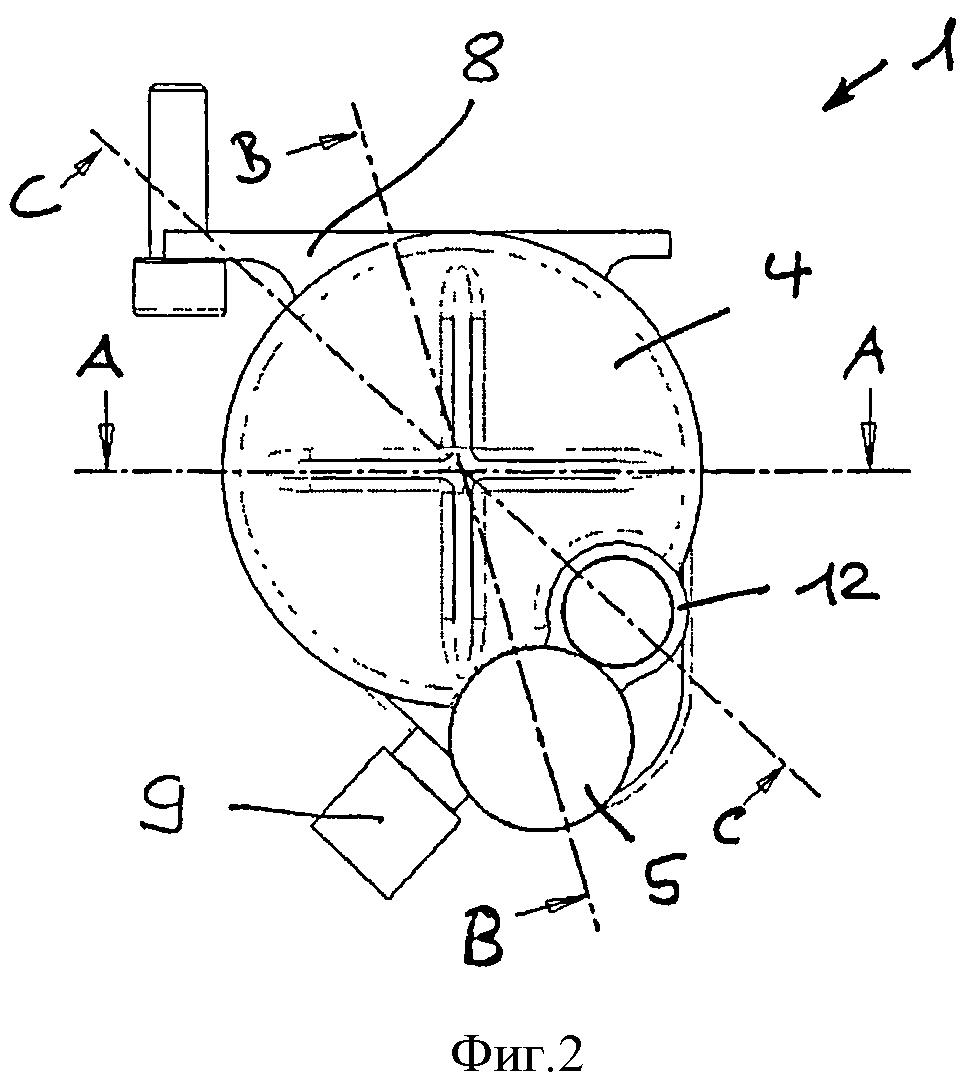
фиг.2 - вид сверху гидростатического привода по фиг.1 с изображением линий разреза видов в разрезе нижеследующих фигур;
фиг.3 - разрез гидростатического привода по фиг.1 и фиг.2 по линии А-А;
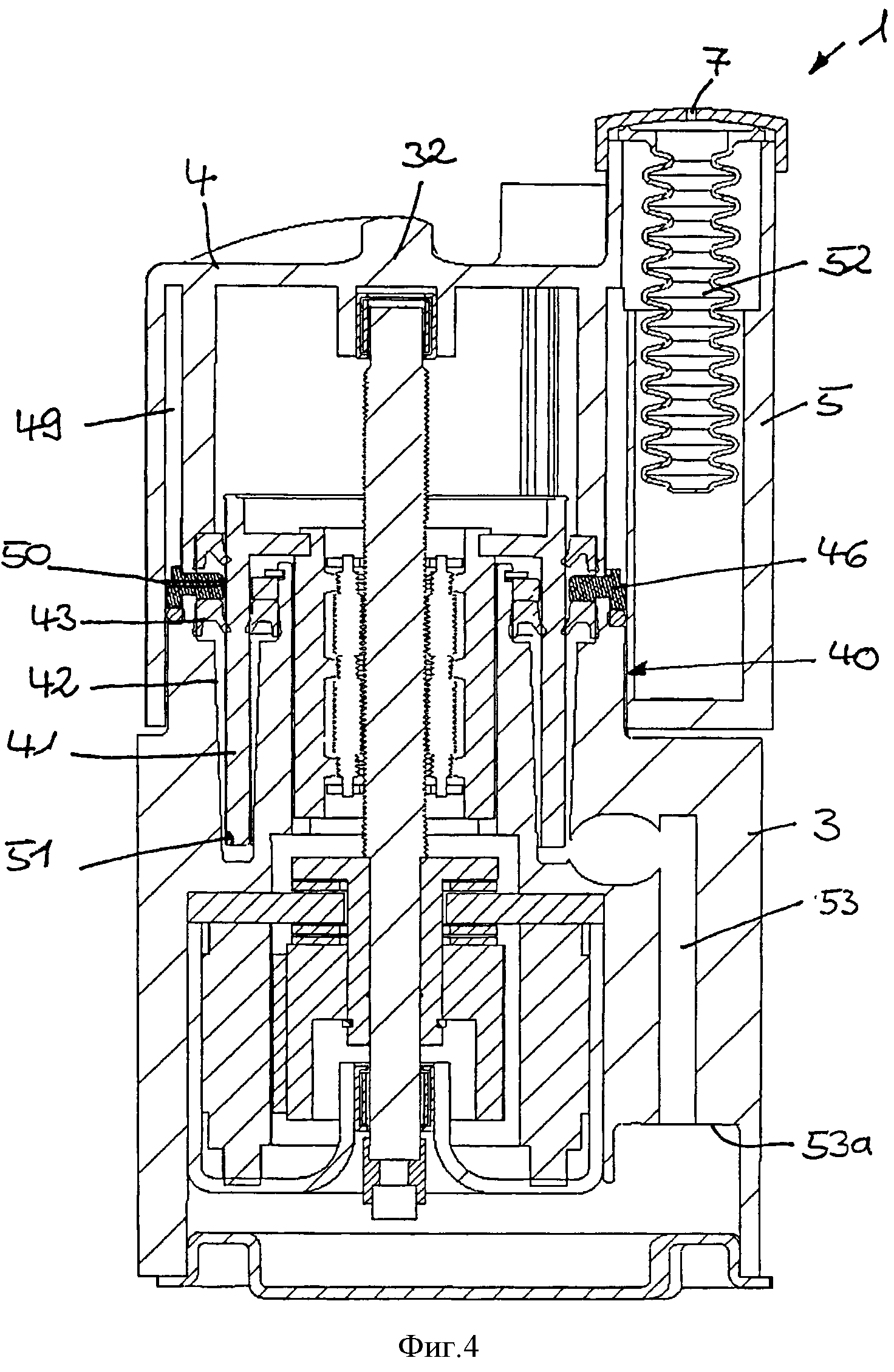
фиг.4 - разрез гидростатического привода по фиг.1 и фиг.2 по линии В-В;
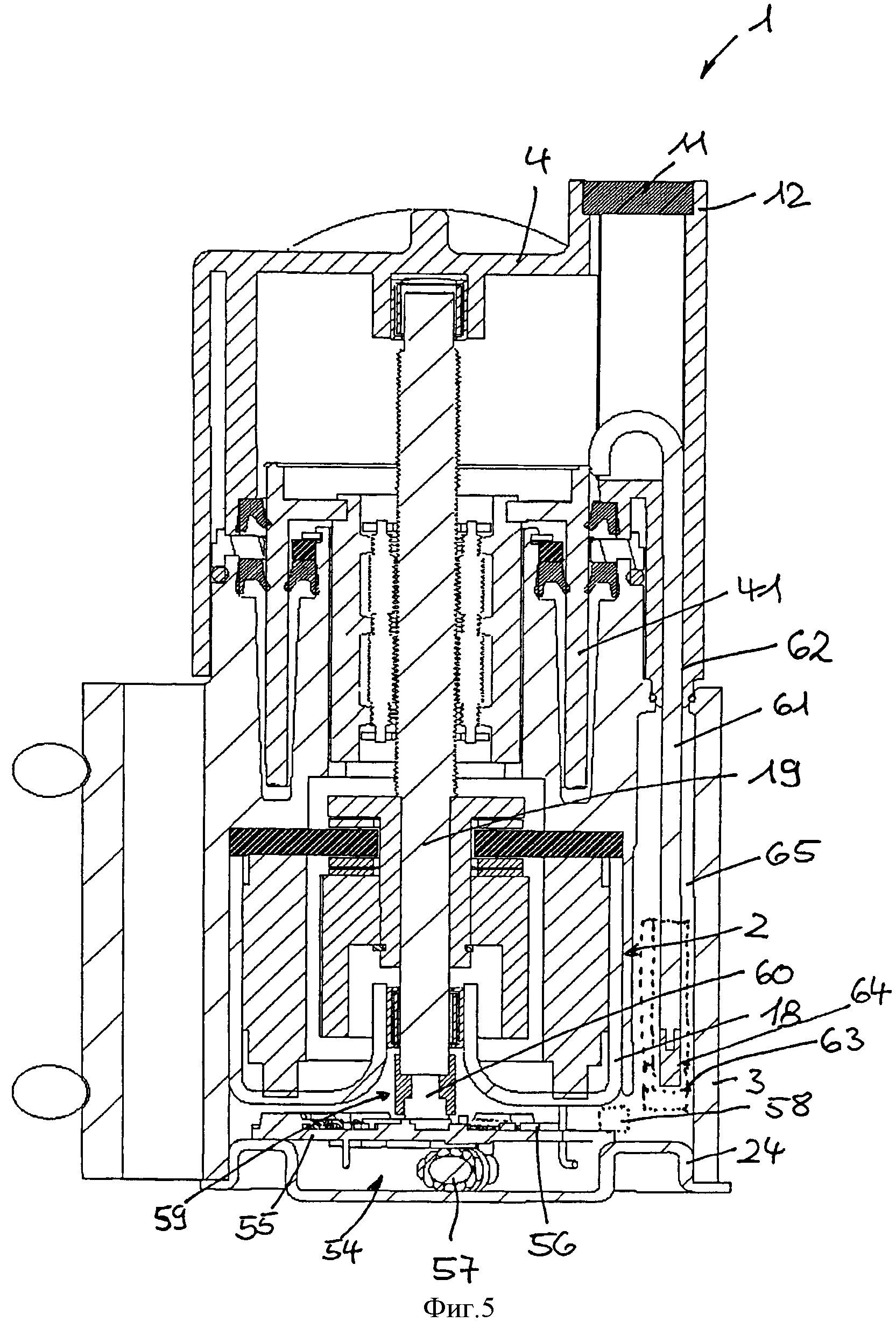
фиг.5 - разрез гидростатического привода по фиг.1 и фиг.2 по линии С-С.
На фиг.1 показан гидростатический привод 1 в трехмерном изображении с выполненным неразъемно из корпуса электромотора 2 и корпуса подающего цилиндра корпусом 3 и с участком 4 корпуса с резервуаром 5 с колпаком, закрытый колпаком 6 с отверстием 7 выравнивания давления. Закрываемый посредством другого колпака 11 монтажный проем 12 служит для монтажа конструктивных элементов и функциональной проверки, в частности, сенсорных устройств гидростатического привода 1.
На корпусе 3 фиксирован кронштейн 8 для фиксации гидростатического привода 1 на неподвижном к корпусу конструктивном элементе, например, на передней стенке кузова автомобиля. Кроме того, на корпусе 3 фиксирован соединенный с камерой сжатия подающего цилиндра напорный патрубок 9 напорного трубопровода 10, обеспечивающий соединение, например, в виде быстроразъемной муфты, с не изображенным рабочим цилиндром. Внутри участок корпуса имеет подшипник для приема шпинделя передачи и усилен снаружи ребром 13 жесткости. Участок 4 корпуса может быть изготовлен посредством способа литья под давлением или формования литьем под давлением из материалов легких металлов, таких как алюминий и его сплавов или из полимерного материала.
На фиг.2 показан гидростатический привод по фиг.1 сверху с участком 4 корпуса, с резервуаром 5 с колпаком и монтажным проемом 12, а также с фиксированным на корпусе 3 (фиг.1) кронштейном 8 и напорным патрубком 9. Линии А-А, В-В, С-С разреза отражают плоскости разреза изображенных на фиг.3, 4, 5 видов в разрезе гидростатического привода.
На фиг.3 показан гидростатический привод 1, в разрезе по линии А-А по фиг.2 с выполненным из корпуса 14 электромотора 2 и корпуса 15 подающего цилиндра 16 неразъемным корпусом 3 и с фиксированным на нем, например, привинченным, спрессованным или приваренным участком 4 корпуса.
Статор 17 электромотора 2 установлен радиально внутри на центрирующей втулке 18, одновременно выполняющей центрирование и установку шпинделя 19 передачи посредством аксиально приформованного свода 20 подшипника. Статор 17 затянут по оси между упорным кольцом 21 и центрирующей втулкой 18 и установлен в ней устойчиво к повороту. Упорное кольцо 21 фиксирует центрирующую втулку 18 по оси к упору 22 корпуса 3 и само фиксировано по оси посредством упорного диска 23 и соединенной с корпусом 3, например, при завинчивании крышки 24.
Расположенный радиально внутри статора 17 ротор 25 установлен с неподвижной фиксацией радиально внутри по оси на втулке 26 подшипника и центрирован. Втулка 26 установлена посредством упорного кольца 21 неподвижно по оси и с возможностью поворота. Для этого в упорном кольце 21 с двух сторон расположены осевые подшипники 27, в данном случае, игольчатые подшипники, образующие гнездо подшипника, с одной стороны, с кольцевым фланцем 28 втулки 26 подшипника, а с другой стороны, - с ротором 25, фиксированным по оси на втулке 26 подшипника посредством стопорной шайбы 29. Втулка 26 подшипника соединена устойчиво к повороту со шпинделем 19 передачи, например, напрессована на него в горячем состоянии, поэтому происходит радиальное центрирование втулки 26 подшипника, а вместе с ней ротора 25 посредством радиального подшипника 30 через центрирующую втулку 18 на корпусе 3 и осевая установка шпинделя 19 передачи на корпусе через упорное кольцо 21. Вторая опора шпинделя 19 передачи осуществляется посредством радиального подшипника 31 в своде 32 подшипника участка 4 корпуса.
На некотором расстоянии по оси от электромотора 2 расположена планетарная обкатная передача 33, образованная шпинделем 19 передачи, втулкой 34 и перекатывающимися между ними планетарными телами 35 качения. Для преобразования приводимого ротором 25 во вращательное движение шпинделя 19 передачи в осевое движение втулки 34 планетарные тела качения оснащены зубчатым зацеплением 36, входящим в зацепление посредством грубого зубчатого зацепления 37 - со втулкой 34, а мелкой резьбы 38, - с наружной резьбой 39 втулки передачи.
Радиально снаружи планетарной обкатной передачи 33 расположен подающий цилиндр 40, содержащий перемещающийся по оси посредством втулки 34 поршень 41 и образованную корпусом 15 и поршнем 41, снабженную напорным патрубком 9 (фиг.1) камеру 42 сжатия. Поршень 41 и камера 42 сжатия расположены соответственно кольцеобразно вокруг втулки 34. Камера 42 сжатия уплотнена наружу посредством расположенных между поршнем 41 и корпусом 15 кольцевых уплотнений 43, 44. Другое кольцевое уплотнение 45 уплотняет поршень 41 относительно внутренней полости участка 4 корпуса. Между обоими кольцевыми уплотнениями 43, 44 предусмотрено набегающее кольцо 46. Участок 4 корпуса уплотнен относительно корпуса 15 посредством кольцевого уплотнения 47.
В показанном варианте выполнения подающий цилиндр 40 изображен в полностью приведенном в действие положении, то есть поршень 41 перемещен для повышения давления в направлении электромотора 2, что эквивалентно вытянутой компоновке поршня 41, поэтому происходит циркуляция усилий нажима вне электромотора, а вследствие этого движение можно осуществлять, по существу, без осевых усилий. Приложенное по оси планетарной обкатной передачи 33 усилие для перемещения поршня 41 поддерживается упорным кольцом 21 на корпусе 3, оказываемое поршнем 41 на камеру 42 сжатия усилие нажима также отводится в корпус 3, поэтому возникает короткая циркуляция усилий с незначительной эластичностью.
Для предотвращения поворота втулки вследствие моментов проскальзывания и трения втулка 34 установлена и направляется в корпусе 15 с фиксацией от поворота. Для этого между втулкой 34 и корпусом 15 предусмотрена продольная направляющая 48, которая может быть образована одним или несколькими распределенными в направлении окружности продольных пазов, в которые для этого входят с радиальным зацеплением совместимые призматические шпонки. Для улучшения, в частности, трибологических характеристик кольцевых уплотнений 43, 44 продольная направляющая 48 может быть выполнена незначительно спиралевидной, например, иметь незначительную часть угла в направлении окружности, например, незначительные градусы.
Из статора 17, ротора 25 и планетарной обкатной передачи 33 можно выполнить унифицированный узел, вдвигаемый с одной стороны в корпус 3, а затем закрываемый с этой стороны корпус посредством крышки 24. С другой стороны устанавливают подающий цилиндр 40, причем поршень 41 фиксируют, по меньшей мере, соединяя его по оси неподвижно со втулкой 34, например, при прочеканивании, фиксации или при навешивании на нее.
На фиг.4 показан гидростатический привод 1 в разрезе по линии В-В по фиг.2. Под этим углом разреза видна компоновка резервуара 49 для эксплуатации гидравлической системы, с которой гидростатический привод 1 сопряжен через камеру 42 сжатия. Резервуар 49 продолжается радиально снаружи камеры 42 сжатия в участок 4 корпуса и ограничивается посредством набегающего кольца 46. Обмен объемов резервуара 49 и камеры 42 сжатия происходит в исходном положении поршня 41, изображенного на чертеже в полностью приведенном в действие положении. В исходном положении поршень 41 радиально перемещен в направлении свода 32 подшипника настолько, что он проходит кольцевое уплотнение 43, а резервуар 49 соединяется с камерой сжатия 42 через один или несколько предусмотренных в набегающем кольце 46 каналов 50. Для лучшего управления переходом между закрытым и открытым соединением в поршне 41 могут быть предусмотрены так называемые продувочные пазы 51.
Резервуар 5 с колпаком соединен с резервуаром 49 в не показанном месте, например, посредством отверстий. Резервуар 5 с колпаком имеет сильфон 52, поддерживающий связь с внешней средой на одной стороне с резервуаром 49, а на другой стороне - через отверстия 7 выравнивания давления, поэтому уравновешивается разница давления резервуара 49 и внешней среды.
Кроме того, на показанном на фиг.4 разрезе изображено осевое расширение 53 камеры 42 сжатия в корпусе 3, продолжающееся до торцевого выступа 53а, в котором размещен не показанный на чертеже предварительный электронный блок, поэтому расширение непосредственно подводится к предусмотренному на печатной плате предварительного электронного блока датчику давления для регистрации рабочего давления камеры 42 сжатия и вместе с ней - подающего цилиндра 40, а датчик давления можно использовать без электрических проводов.
На фиг.5 показан гидростатический привод 1 вдоль линии С-С разреза по фиг.2 с видом на сенсорное устройство 54 с возможностью его расположения в предварительном электронном блоке 55, выполненное, по меньшей мере, из одной электронной печатной платы 56, с расположенными на ней необходимыми электронными элементами для управления и снабжения током электромотора 2, обработки и/или передачи регистрируемых датчиками измерительных сигналов. Предварительный электронный блок 55 имеет соединение 57, которое может быть проведено через корпус 3 или крышку 24 и содержит сигнальные шины и питающие провода и соединяющее с внешним блоком управления. Предварительный электронный блок 55 расположен и фиксирован между центрирующей втулкой 18 и крышкой 24.
В показанном примере выполнения предусмотрено центральное позиционирование всех датчиков для управления гидростатическим приводом на печатной плате 56 и вместе с этим - без соединительных проводов. Для этого на печатной плате 56 установлен датчик 58 давления, при помощи которого регистрируют имеющееся в расширении 53, как и в соединяющем сверлении по фиг.4 давление и уплотняют расширение 53. Кроме того, расположенный на печатной плате 56 датчик 59 угла поворота регистрирует угол поворота шпинделя 19 передачи. Датчик 59 угла поворота может быть датчиком Холла, причем в шпинделе передачи 19 расположен соответствующий сенсорный магнит 60. Для регистрации осевого перемещения поршня 41 с ним соединен рычаг 61, например, посредством навешивания или фиксации, проведенный по оси в направляющей 62 участка 4 корпуса и подведенный вплоть до печатной платы 56, поэтому только условно изображенный, установленный на печатной плате 56 датчик 63 осевого перемещения, продолжающийся в образованном в корпусе 3 свободном пространстве 65, регистрирует осевое перемещение поршня 41 пространственно, как находящийся на некотором расстоянии по оси к нему. Датчик 63 осевого перемещения выполнен предпочтительно, в виде датчика Холла и регистрирует осевое перемещение в зависимости от интервала расположенного на рычаге 61 сенсорного магнита 64. Для монтажа рычага 61 и функциональной проверки датчика 63 осевого перемещения на участке 4 корпуса предусмотрен монтажный проем 12, закрываемый колпаком 11.
Реферат
Изобретение относится к гидростатическому приводу. Гидростатический привод с подающим цилиндром содержит корпус, наполненной рабочей средой камерой сжатия с нагружаемым давлением поршнем, с преобразующей вращательное движение в осевое движение планетарной обкатной передачей со втулкой, со шпинделем передачи и перекатывающимися между ними планетарными телами качения. Также гидростатический привод содержит электромотор, приводящий в движение планетарную обкатную передачу, с присоединенным жестко к корпусу статором и с возможностью поворота относительно него ротором. Камера сжатия выполнена кольцеобразно, а планетарная обкатная передача расположена радиально внутри камеры сжатия. Достигается оптимизация конструктивного пространства. 9 з.п. ф-лы, 5 ил.
Комментарии