Электромагнитное устройство, выполненное с вожможностью обратимой работы в качестве генератора и электродвигателя - RU2516373C2
Код документа: RU2516373C2
Чертежи














Описание
Область техники
Настоящее изобретение относится к электромагнитному устройству, выполненному с возможностью обратимой работы в качестве генератора и электродвигателя, то есть, устройству, выполненному с возможностью преобразования кинетической энергии в электрическую энергию и наоборот.
Предшествующий уровень техники
Во многих областях промышленности часто возникает потребность установить обратимые электрические машины в системы, содержащие вращающийся элемент, так что в зависимости от рабочих условий системы, в которой устанавливают машину, имеется возможность либо использовать движение такого элемента для генерирования электрической энергии для питания других компонентов системы, либо питать эту машину электрической энергией для приведения вращающегося элемента во вращение.
Общими требованиями к таким машинам, особенно для приложений в транспортных средствах, таких, как наземные транспортные средства или летательные аппараты, являются компактность и легкость, а также дешевизна.
Пример машины этого типа известен из документа US 6832486. В этом документе раскрыта обратимая электрическая машина для авиационных приложений, подключаемая к турбине авиационного двигателя, чтобы генерировать электрическую энергию для различных целей за счет использования вращения турбины или, наоборот, для запуска двигателя. Ротор машины образован намагниченными, обращенными радиально наружу концами лопастей лопастного кольца в турбине. Кольцо статора, внутри которого движется ротор, снабжено катушками. В одном примере осуществления, статор состоит из непрерывного кольца или набора отдельных подковообразных элементов и определяет канал, внутри которого вращается ротор. В этом случае, катушки намотаны на противоположных продолжениях статора и обращены к обоим полюсам одного и того же магнита.
Недостаток этого известного технического решения заключается в том, что ширина канала, определенного между выступающими наружу продолжениями кольца статора или отдельными подковообразными сердечниками является фиксированной и не может стать меньшей, чем некоторое минимальное значение, которое зависит также от толщины ротора и от необходимости компенсировать возможные колебания ротора. Таким образом, при заданном статоре и заданном роторе воздушный зазор между статором и магнитами также оказывается фиксированным и не может быть меньшим, чем некоторое значение. Поэтому невозможно регулировать и оптимизировать положение статора и ротора с тем, чтобы получить максимальный кпд и максимальную рабочую гибкость.
В документе US 5514923 раскрыта обратимая электрическая машина, которую можно использовать в качестве маховика и которая имеет два диска ротора, снабженные магнитами и расположенные симметрично относительно статора, несущего множество катушек, смещенных относительно магнитов. В таком случае, два магнита используются для индуцирования электрического поля в катушке, находящейся между ними. Магнитная цепь не замкнута, а это влечет за собой большие потери энергии и приводит к сильным электромагнитным помехам.
В документе BE 867436 раскрыто электрическое устройство, имеющее ротор, содержащий два алюминиевых диска, соединенные стальным кольцом и несущих каждый множество магнитов, распределенных через одинаковые интервалы по его периферии. Ротор вращается между двумя пластинами статора, каждая из которых несет кольцо из U-образных магнитных ярм с аксиально направленными плечами (машина с выступающими полюсами), при этом каждое ярмо обращено к паре магнитов в диске ротора, а магниты установлены - по направлению к ярмам - в виде последовательности чередующихся противоположных полюсов. Эта машина не является обратимой и работает только как синхронный электродвигатель. Более того, воздушный зазор между статором и ротором является фиксированным, так что соображения, приведенные по этому поводу в связи с документом US 6832486, применимы и к этому устройству. Дополнительно, используемые материалы приводят к очень большим потерям на высоких частотах и к значительным токам Фуко и потерям на гистерезис, которые обуславливают очень высокие температуры в диске и могут привести к размагничиванию магнитов и даже к пригоранию алюминиевого диска.
В документе US 6137203 раскрыт бесщеточный осевой электродвигатель с двумя статорами и ротором, установленным с возможностью вращения между статорами в ответ на воздействие магнитных полей, генерируемых статорами. Эта машина является многофазной машиной «обмоточного» типа, т.е. катушки каждой фазы намотаны вокруг множества соседних полюсных продолжений при отсутствии катушки любой другой фазы между ними. Статоры являются регулируемыми в осевом направлении во время работы для изменения воздушного зазора электродвигателя, чтобы обеспечить электродвигателю возможность создания большого крутящего момента при малой скорости, а также малом воздушном зазоре, и непрерывного создания крутящего момента, когда воздушный зазор становится больше, при большой скорости. Регулирование статора имеет место только в осевом направлении, и это не позволяет справиться ни с деформациями, возникающими из-за высоких температур, достигаемых во время работы устройства, особенно в предпочтительных применениях в турбинах с гидравлическим приводом, ни с возможным перегревом обмоток и статора.
В документе US 4710667 раскрыта динамоэлектрическая машина обмоточного типа, в которой зазор между ротором и статором регулируется только в осевом направлении и только в фазе сборки. Ротор включает в себя магниты из магнитно-твердого феррита, а статор включает в себя сердечники для катушек из магнитно-мягкого феррита.
Во всех известных документах, рассмотренных выше, описаны жестко скомпонованные структуры, конструкцию которых невозможно изменить простым образом, чтобы приспособить к различным приложениям с разными требованиями и/или обеспечить более простые и эффективные сборку и техническое обслуживание устройств.
Краткое изложение существа изобретения
Задача изобретения состоит в том, чтобы разработать обратимое устройство, относящееся к типу с выступающими полюсами, которое устраняет недостатки известных технических решений и которое можно применять в широком диапазоне приложений, например, в наземных транспортных средствах, кораблях и летательных аппаратах, а предпочтительно - в приложениях, в которых устройство встроено в турбину или, в общем случае, в крыльчатку устройства, приводимого в действие за счет движения текучей среды.
Чтобы решить эту задачу, предложено устройство, имеющее статор и ротор, вращающийся спереди от статора. Ротор несет множество магнитов, распределенных через одинаковые интервалы и с чередующимися ориентациями в кольцеобразной структуре на роторе. Статор содержит, по меньшей мере, один набор магнитных ярм, каждое из которых имеет пару выступающих плеч, проходящих к ротору и несущих катушку для электрического соединения с использующимся устройством или силовым драйвером, а магнитное ярмо в единственном или каждом наборе является частью одной и той же замкнутой магнитной цепи, наряду с парой магнитов, противолежащих плечам ярма в заданный момент времени, и воздушным зазором, отделяющим ярмо от магнитов. Магнитные ярма в единственном или каждом наборе установленные независимо в осевом и радиальном направлениях выполнены с возможностью статического и динамического регулирования положений ярм относительно магнитов.
Регулирование, преимущественно, может предусматривать также поворотное движение вокруг, по меньшей мере, одной оси, а ярма предпочтительно выполнены с возможностью регулирования посредством поступательного движения вдоль трех взаимно перпендикулярных осей и поворотного движения вокруг этих трех взаимно перпендикулярных осей. Благодаря независимой установке, каждое ярмо можно выполнить в виде ячейки статора, которую можно повторять желаемое количество раз и с любым желаемым положением относительно других ячеек. Таким образом, изобретение дает исключительно высокую гибкость. Другие преимущества заключаются в следующем:
упрощается сборка устройства;
появляется возможность оптимизировать относительные положения ярм и магнитов при сборке устройства, гарантируя тем самым максимальный кпд устройства;
появляется возможность простой компенсации колебаний вибраций и деформаций ротора во время работы;
в случае плохой работы или коротких замыканий в одной ячейке, появляется возможность исключить из эксплуатации только ту ячейку, а остальная часть устройства при этом продолжает работать;
в случае модульной машины, имеющей модули и генератора, и электродвигателя, появляется возможность независимого регулирования рабочих параметров модулей генератора и электродвигателя, т.е. при запуске можно увеличивать расстояние между ярмами модулей генератора для временного отключения функции генератора или задания для нее ограниченного значения, или даже сохранения использующих цепей электрически разомкнутыми для облегчения запуска, тогда как ярма модулей электродвигателя можно сближать с магнитами для увеличения ускорения.
Можно предусмотреть единственный набор ярм, и тогда магниты образуют последовательность чередующихся полюсов на одной поверхности ротора. Ротор может быть выполнен из ферромагнитного материала, и в этом случае магнитные цепи содержат пару магнитов и одно ярмо и замкнуты через воздушный зазор и ротор. Если в областях, не занятых магнитами, ротор выполнен из неферромагнитного материала, магниты, обращенные к одному и тому же ярму, будут соединены ферромагнитными элементами, а магнитная цепь замкнута через воздушный зазор и ферромагнитный элемент.
В альтернативном варианте, когда ротор в областях, не занятых магнитами, выполнен из неферромагнитного материала, статор может включать в себя два набора магнитных ярм, расположенных симметрично относительно ротора. В таком случае, пара последовательных магнитов образует замкнутую магнитную цепь с одним магнитным ярмом в первом наборе и одни магнитным ярмом во втором наборе (плюс, конечно же, соответствующие воздушные зазоры). Ярма в каждом наборе поддерживаются независимо от ярм в другом наборе.
Единственный или каждый набор ярм может быть обращен ко всему кольцу магнитов, или может быть обращен к одной дуге или дискретным дугам такого кольца.
Когда ярма обращены ко всему кольцу магнитов, ротор может нести некоторое количество магнитов, вдвое превышающее количество ярм (то есть, количество магнитов равно количеству выступающих плеч или полюсных продолжений), или может нести некоторое количество магнитов, отличающееся от количества полюсных продолжений. В последнем случае периодически возникает заданное геометрическое фазовое соотношение между ярмом и противолежащим магнитом. Эти конфигурации пригодны для построения многофазных машин. При таких конфигурациях, катушки для приема или подачи электрической мощности, намотанные на плечах, имеющих одинаковое геометрическое фазовое соотношение с противолежащим магнитом, могут быть соединены друг с другом внутри устройства и иметь общее соединение с силовым драйвером или использующимся устройством. Можно также соединять друг с другом каждую вторую катушку среди катушек, намотанных на плечах, имеющих одинаковое геометрическое фазовое соотношение с противолежащим магнитом, и соединять две получаемые группы катушек с силовым драйвером или использующимся устройством, а электрические фазы при этом сдвинуты на 180°.
Устройство может найти несколько приложений, особенно в связи с крыльчаткой устройства, приводимого в действие за счет движения текучей среды, в частности, в воздушных генераторах или авиационных или морских газотурбинных двигателях или движителях, например, в авиационных или морских применениях можно использовать это устройство, скажем, в качестве генератора, встроенного в турбину, или в качестве запускающего электродвигателя либо электродвигателя обратной связи для турбины, либо в качестве электродвигателя, связанного с движителями морских или воздушных судов. Другие приложения возможны в насосах для газотрубопроводов.
В соответствии с еще одним аспектом, изобретение также касается крыльчатки устройства, приводимого в действие за счет движения текучей среды, например, воздушного генератора, газотурбинного двигателя для самолетов или кораблей, винта движителей морских или воздушных судов, насоса для газотрубопроводов и т.п., имеющих встроенное в них устройство, согласно изобретению.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 представляет общий вид в перспективе устройства, соответствующего первому варианту его осуществления с осевой установкой;
фиг.2 представляет общий вид ротора устройства, показанного на фиг.1, с парой ярм и связанных с ними катушек;
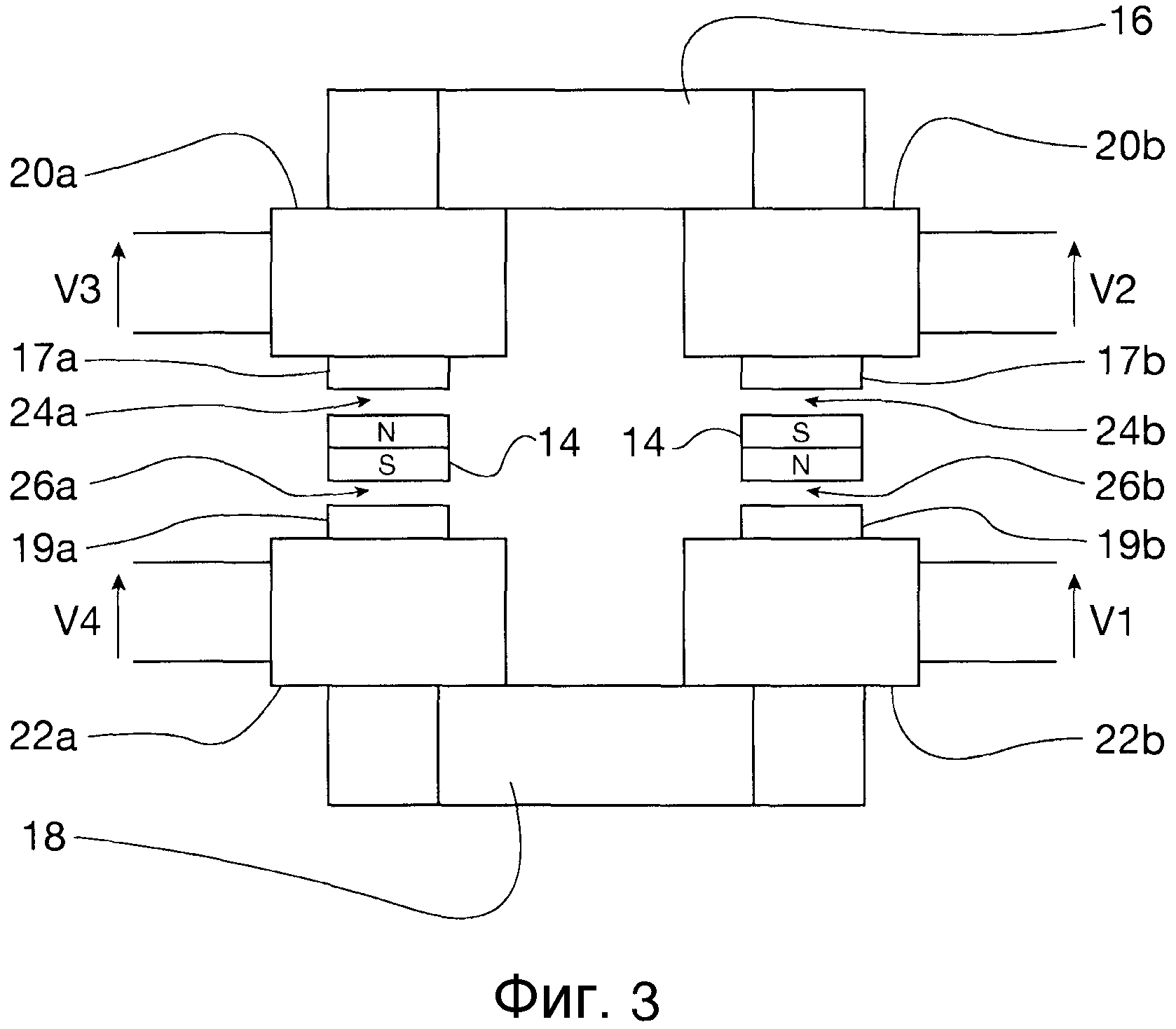
фиг.3 схематически представляет магнитную цепь;
фиг.4 схематически представляет пространственное соотношение между магнитами и ярмами во время вращения ротора;
фиг.5 и 6 представляют виды, аналогичные фиг.2 и 3, относящиеся к варианту примера осуществления, предусматривающего осевую установку;
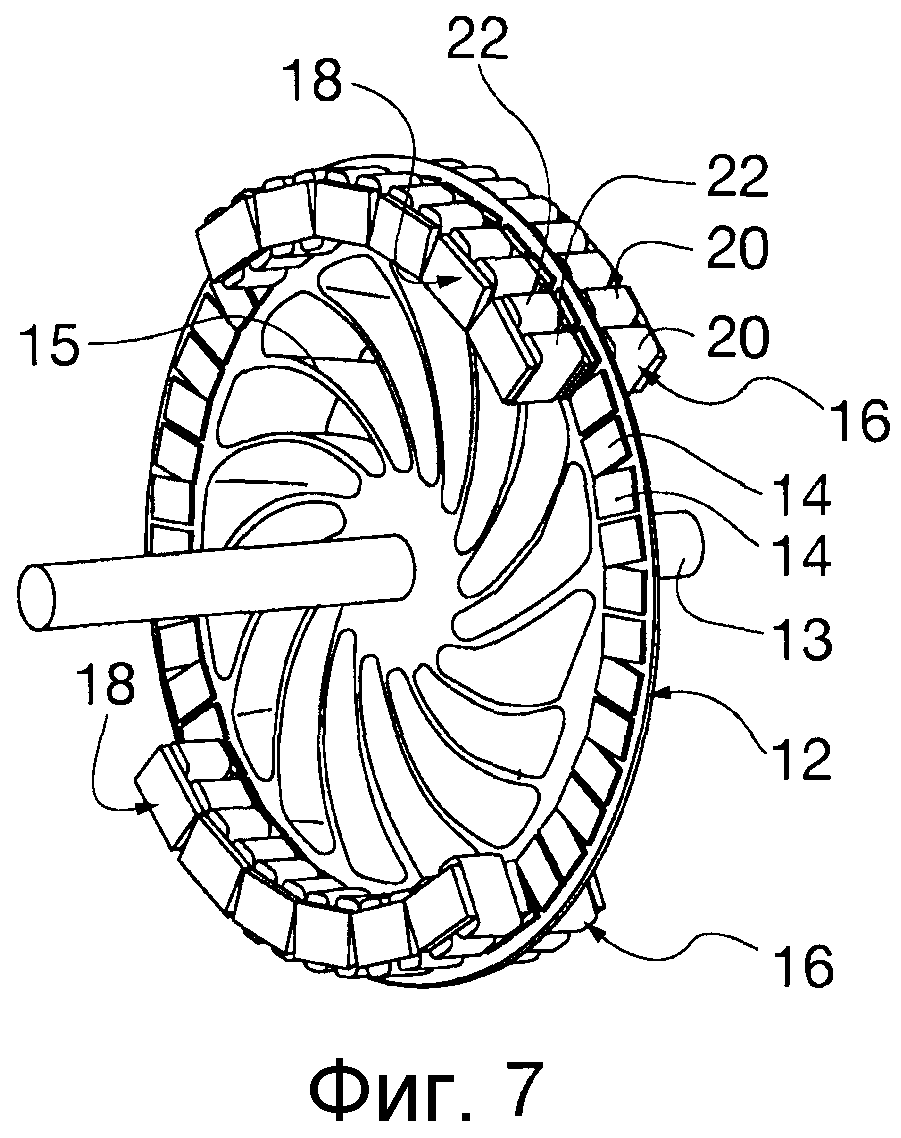
фиг.7 представляет схематический вид варианта осуществления согласно фиг.1-3, с ярмами, находящимися только спереди от дискретных секторов кольца магнитов;
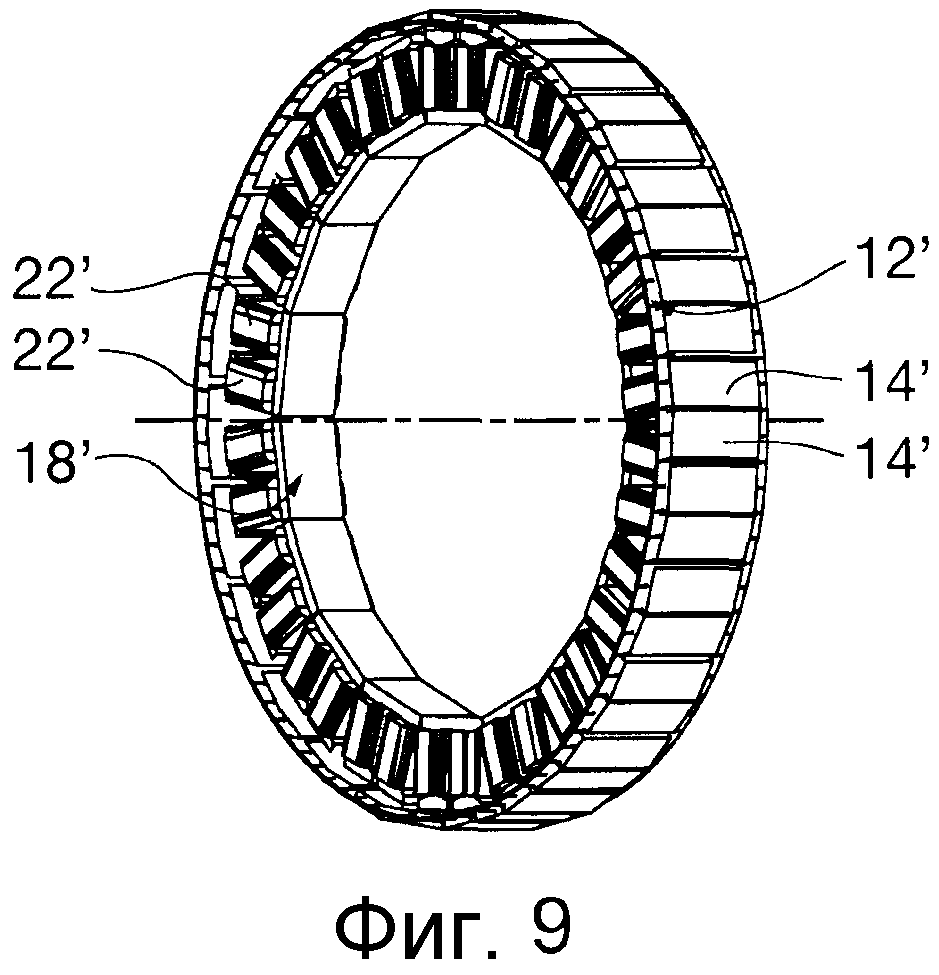
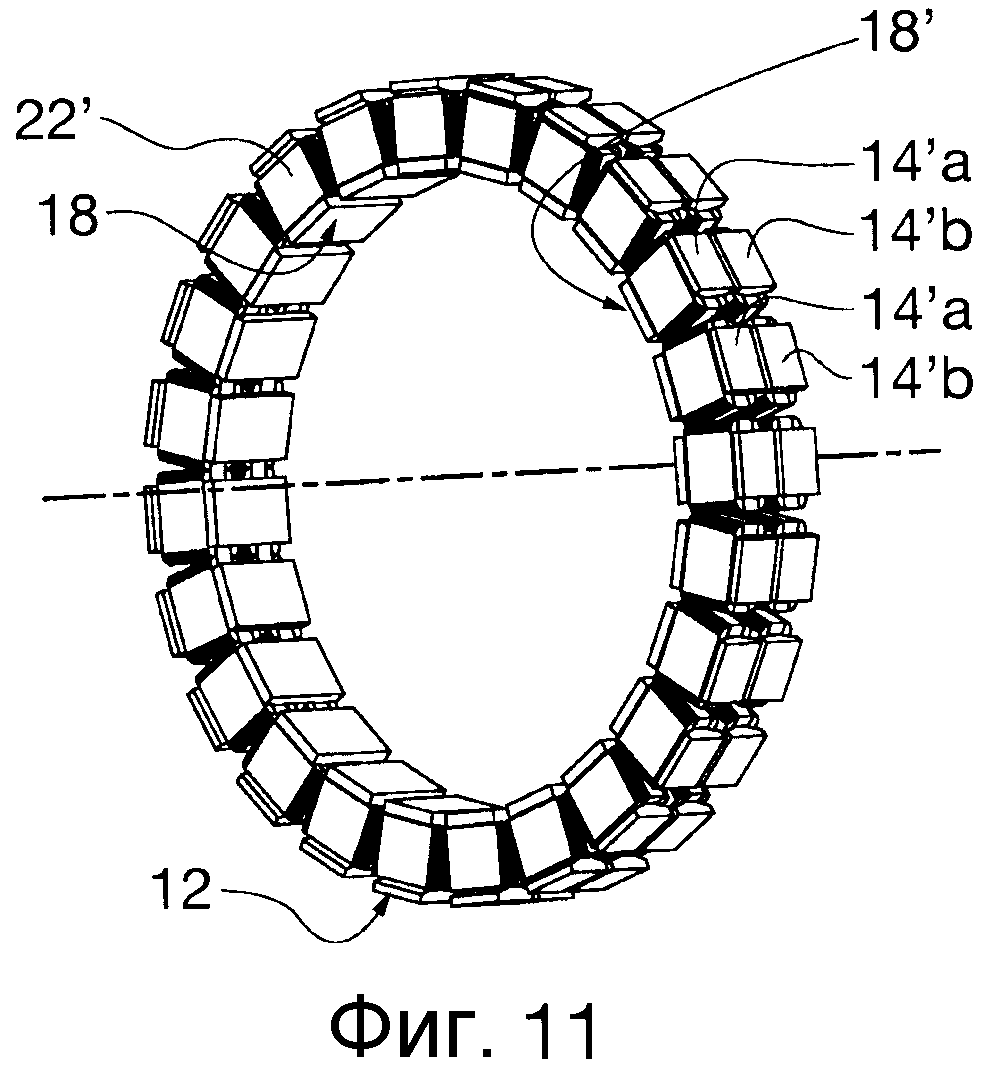
фиг.8-12 представляют схематические виды согласно ряду примеров осуществления, предусматривающих радиальную установку магнитов и ярм;
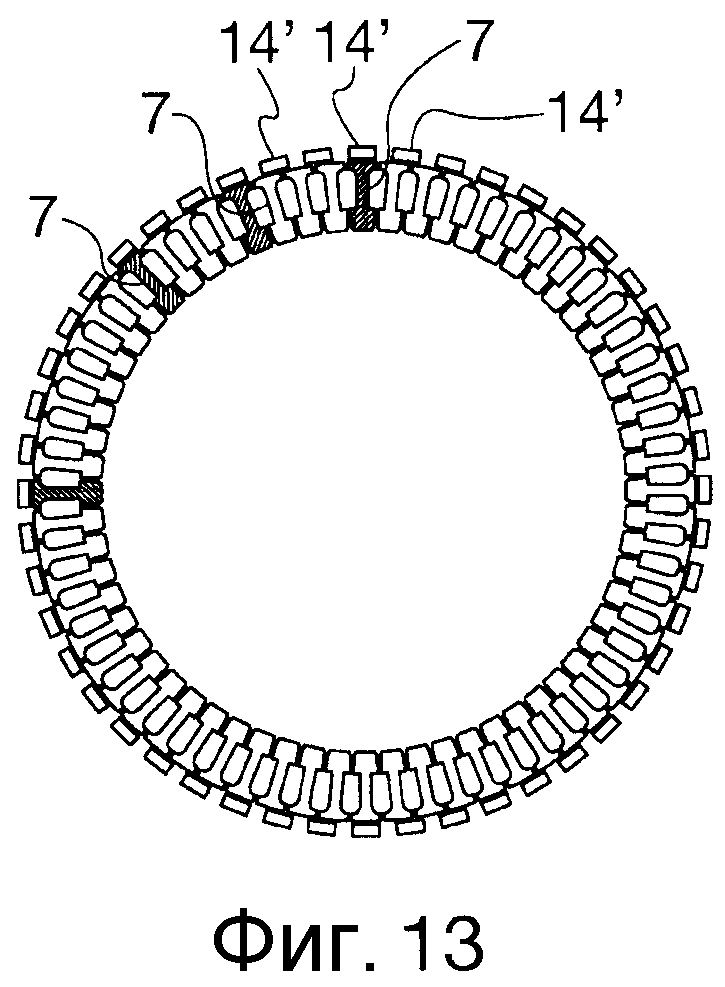
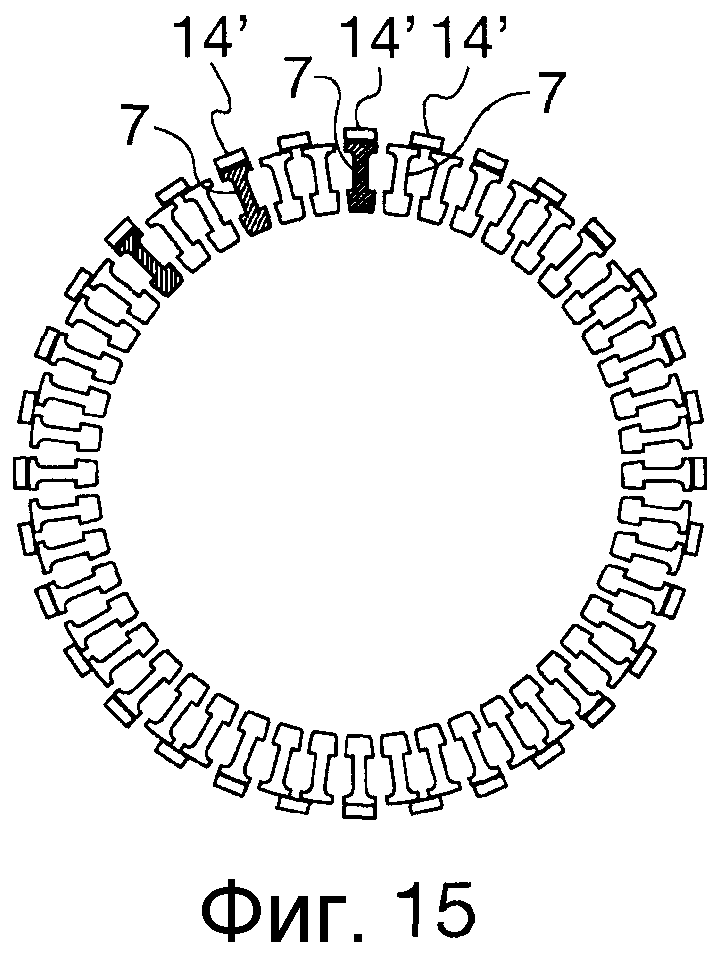
фиг.13-15 представляют схематические виды, иллюстрирующие ряд структур магнитов и ярм, используемых во многофазных машинах;
фиг.16(а) и 16(b) представляют в увеличенном масштабе осевые сечения плеча ярма и самого ярма, соответственно, используемых во многофазных машинах согласно фиг.13-15;
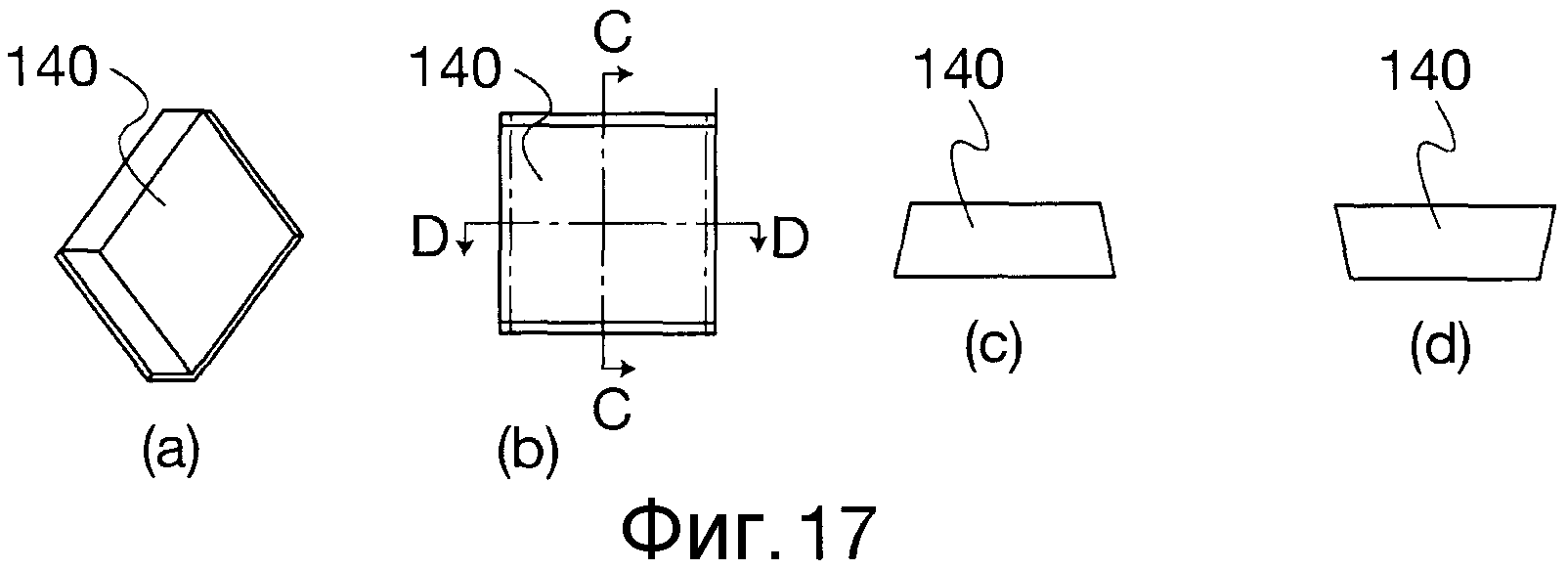
фиг.17(а) - 17(d) представляют различные виды магнита с двойным скосом;
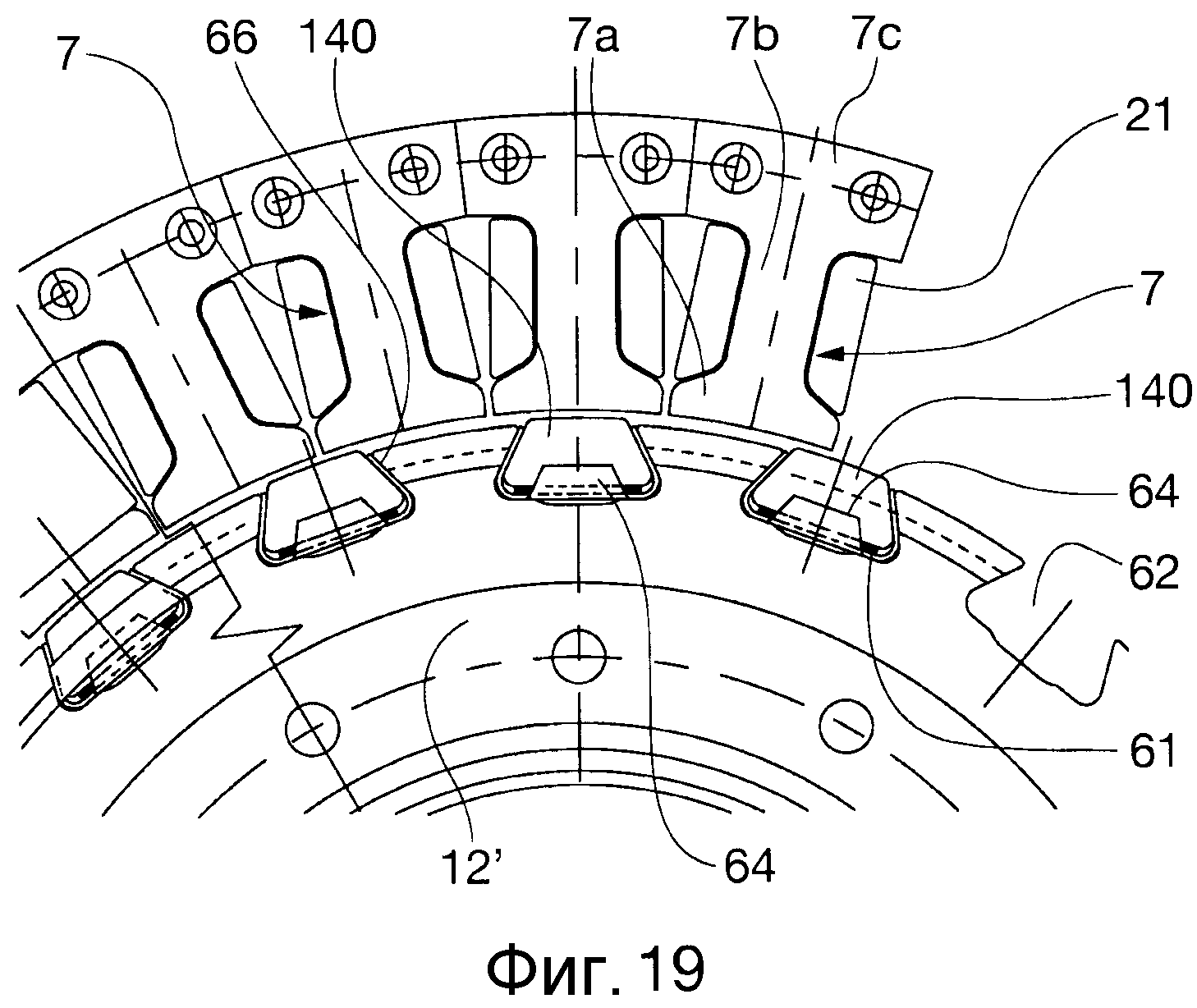
фиг.18 и 19 представляют виды сверху части радиальной машины с внешним и внутренним ротором, соответственно, иллюстрирующие возможные установки магнитов;
фиг.20-22 представляют различные виды ярма, связанного со средством регулирования его положения;
фиг.23 представляет ярмо, выполненное в слое смолы;
фиг.24 представляет ярмо совместно с указаниями вариантов регулирования, предусматривающих поступательное и поворотное движения;
фиг.25 представляет диаграмму магнитной проницаемости феррита;
фиг.26 представляет приложение изобретения к движителю корабля или самолета;
фиг.27 представляет принципиальную схему ячейки статора; и
фиг.28 представляет принципиальную схему, иллюстрирующую применение устройства в качестве электромагнитного маховика.
Описание предпочтительных вариантов воплощения изобретения
Обращаясь к фиг.1-3 отмечено, что здесь показан первый вариант осуществления устройства 10, предназначенного для встраивания в осевую машину.
Устройство 10 содержит главным образом две отличающиеся конструкции.
Первая конструкция представляет собой диск или кольцо 12 (для простоты, в нижеследующем тексте будет упоминаться диск), который или которое образует ротор устройства 10 и установлен(о) на валу 13. Основные поверхности диска 12 несут кольцо идентичных постоянных магнитов 14, распределенных так, что они оказываются равноотстоящими вдоль его окружности около внешнего края диска. Магниты 14 расположены так, что образуют на каждой поверхности диска 12 последовательность чередующихся противоположных полюсов. В примере осуществления, показанном на фиг.1-3, диск 12 в областях, не занятых магнитами 14, выполнен из неферромагнитного материала.
Центральная часть диска 12 образована множеством лопастей 15, имеющих движительную функцию и проводящих охлаждающий воздух к магнитам 14, а также к катушкам, рассматриваемым ниже, для приема или подачи электрической мощности, генерируемой устройством или предназначенной для этого.
Магниты 14 могут иметь круглое поперечное сечение, как показано на фиг.2, или другое криволинейное поперечное сечение, или даже многоугольное поперечное сечение, либо выпуклое (в частности, квадратное или прямоугольное), либо вогнутое.
Магниты преимущественно выполнены из материала с высокой напряженностью поля (например, около 1,5 Тесла при исполнении по современной технологии). Выбор материала будет зависеть от типа приложения и, следовательно, от рабочих условий, в частности, от температуры рабочей среды. Материалы, обычно используемые в таких машинах, представляют собой NdFeB, что гарантирует работу при температурах до 150°C, или Sm-Co (или - в общем случае - соединение редкоземельного металла и кобальта), что гарантирует работу при температурах до 350°C, или AlNiCo, что гарантирует работу при температурах до 500°C. В зависимости от материалов, магниты 14 могут состоять из намагниченных областей диска 12, или они могут быть магнитными телами, вставленными в посадочные места, образованные в диске.
Вторая конструкция состоит из двух наборов ярм 16, 18 магнитов, которые расположены в соответствующем венце вокруг диска 12 симметрично относительно него и образуют статор устройства. В изображенном примере, ярма 16, 18 магнитов распределены так, что оказываются равноотстоящими друг от друга вокруг диска 12 спереди от магнитов 14. Ярма имеют, по существу, С- или U-образную форму, либо - в общем случае - вогнутую форму, открытую по направлению к диску 12, с двумя, по существу, параллельными плечами или полюсными продолжениями, обозначенными позициями 17a, 17b для ярм 16 и позициями 19а, 19b для ярм 18 (см. фиг.3). Плечи 17a, 17b и 19a, 19b несут катушки 20a, 20b и 22a, 22b, соответственно, из электропроводного материала (например, меди или алюминия, причем последний предпочтителен в авиационных приложениях благодаря его меньшему удельному весу), с соответствующими индивидуальными соединениями либо с использующимися устройствами для генерирования электрической мощности, либо с устройствами подачи мощности (более конкретно генератором импульсов или бесщеточным силовым драйвером), в зависимости от условий применения предлагаемого устройства. Катушки 20, 22 преимущественно могут быть выполнены из тонкого листа, намотанного на соответствующем плече, для снижения потерь на гистерезис, токов Фуко по горизонтальной поверхности и скин-эффекта. Конечно, противоположные катушки подключены с противоположными полярностями.
Подобно магнитам 14, плечи 17a, 17b, 19a, 19b ярм 16, 18 могут иметь круглое поперечное сечение или другое криволинейное поперечное сечение или даже многоугольное поперечное сечение, либо выпуклое (в частности, квадратное или прямоугольное), либо вогнутое. Неправильные формы магнитов и/или плеч ярм и/или другие формы поперечных сечений для магнитов и ярм также могут способствовать снижению зубчатости, которому, как известно, наоборот, благоприятствуют очень симметричные конструкции. Какими бы ни были формы поперечных сечений ярм и магнитов, важно, чтобы их площади имели размеры, которые были бы подобными или, по существу, одинаковыми. Подобие или, по существу, одинаковость размеров площадей магнитов и ярм необходима для гарантии равномерности плотности магнитного потока, проходящего в ярмах 16, 18 и магнитах 14.
За счет использования магнитов и ярм с круглым поперечным сечением получается синусоидальное поведение перекрытия торцевых поверхностей магнита и ярма (см. фиг.4) при вращении ротора, и это - в случае применения устройства в качестве генератора - приведет к почти чисто синусоидальной электродвижущей силе (эдс). Вместе с тем, соображения коммерческой доступности компонентов и снижения зубчатости могут привести, например, к использованию магнитов с круглым поперечным сечением и ярм, имеющих плечи с квадратным поперечным сечением, сторона которого, по существу, равна диаметру магнита. В этом случае, генерируемая эдс будет также почти синусоидальной, однако - с высшими гармониками, которые, по существу, не вызывают потери, принимая во внимание большую ширину полосы материалов, используемых для проектирования ярм. Отметим, что с учетом поперечных размеров, которые можно предположить для магнитов и ярм (например, несколько сантиметров), требование подобия площадей магнитов и ярм по-прежнему удовлетворяется.
Рассматривая - для простоты описания - магниты и ярма с одинаковым круглым поперечным сечением и обозначая их диаметр символом D, отмечаем, что для гарантии симметрии получаемой формы волны сигнала, необходимо, чтобы плечи каждого ярма 16, 18 были разнесены на расстояние D, вследствие чего длина каждого ярма составляет 3D. В соответствии с ярмами 16, 18, ротор 12 будет, следовательно, иметь окружность, длина которой составляет 4D′N, где N - количество ярм в кольце. Таким образом, появляется возможность создавать роторы, гарантирующие установку желаемого количества ярм или, наоборот, количество ярм будет определяться размером ротора. Более того, для заданного диаметра ротора также можно изменять количество ярм путем изменения диаметра окружности, определенной ярмами и магнитами (т.е. - на практике - путем изменения расстояния от края ротора 12 до магнитов).
Количество M магнитов 14 связано с количеством N ярм и зависит от типа устройства, которое надо создать. Например, в синхронной машине применяется соотношение M=2N так что расстояние между последовательными магнитами 14 равно их диаметру D, а в статической конфигурации устройства 10, пара последовательных магнитов 14 может находиться точно спереди от обоих плеч ярма 16 или 18. Наоборот, в случае асинхронной машины, применяется соотношение M≠2N, где M является четным числом, а расстояние между последовательными магнитами 14 меньше или больше, чем D, в зависимости от того, какое из двух соотношение - M>2N или M<2N соблюдается.
Плечи ярм 16, 18 оканчиваются плоскими поверхностями, параллельными поверхностям ротора 12 и магнитов 14. Каждая пара ярм 16, 18 образует магнитную цепь с обращенной к ней парой магнитов 14, замыкаемую через воздушные зазоры, отделяющие ярма от магнитов. Пара ярм 16, 18 с соответствующими катушками 20, 22 также будет именоваться далее «магнитными клещами».
Как лучше показано на схеме согласно фиг.3, концы плеч 17a, 17b, 19a, 19b ярм 16, 18 немного отстоят от обращенных к ним полюсов соответствующей пары магнитов 14, тем самым, образуя воздушные зазоры 24a, 24b и 26a, 26b, соответственно, предназначенные для обеспечения, с одной стороны, вращения диска за счет предотвращения контакта между магнитами и ярмами, а с другой стороны - предотвращения насыщения магнитной цепи. Поскольку ротор 12 и статор 16, 18 имеют плоские поверхности, механическая обработка позволяет получать очень малые воздушные зазоры, а значит - и высокий кпд. Отметим для ясности, что промежуток между плечами ярма на чертеже показан чрезмерно большим.
Возвращаясь к фиг.1 отмечено, что внешний кожух 28, выполненный, чтобы обеспечить пропускание и вращение вала 13, поддерживает ротор и статор устройства 10 в сборе. Кроме того, ярма установлены в индивидуальные опоры, не показанные на этом чертеже и подробнее рассматриваемые ниже, чтобы обеспечивать независимое регулирование положений ярм 16, 18 относительно магнитов 14 посредством поступательного движения вдоль трех взаимно перпендикулярных осей x, y, z и поворотного движения, обозначенного стрелками Ω1, Ω2, Ω3, вокруг тех же самых взаимно перпендикулярных осей (см. фиг.24).
Это обеспечивает простую установку ярм и оптимизацию их положений при сборке устройства, а также максимизацию кпд устройства.
Возможность независимого регулирования осевых положений ярм обеспечивает не только минимизацию ширин воздушных зазоров 24, 26 и, тем самым, максимизацию кпд, но и также изменение таких воздушных зазоров во время работы с целью адаптации действия магнитных клещей к требованиям разных фаз работы, как будет очевидно из описания некоторых приложений изобретения. Кроме того, в случае наличия модулей и генератора, и электродвигателя, можно временно отключать функцию генератора при запуске или регулировать ее до достижения некоторого ограниченного значения, чтобы облегчить запуск, а модули электродвигателя можно сближать с магнитами для увеличения ускорения. Помимо этого, увеличением воздушного зазора можно воспользоваться как конструктивным признаком, обеспечивающим безопасность, в случае перегрева: такое увеличение воздушного зазора вызывает увеличение магнитного сопротивления цепи, так что снижается связанное с ним напряжение на катушках, а значит и температура. В общем случае, можно исключить одно или более ярм, которые не работают надлежащим образом, и остальная часть устройства при этом продолжает работать.
Возможность регулирования в плоскости, перпендикулярной оси вращения, также является конструктивным признаком, обеспечивающим безопасность, который можно использовать в качестве альтернативы увеличению воздушного зазора в случае перегрева: в самом деле, потери от выравнивания ярм и магнитов также вызывают увеличение магнитного сопротивления цепи, приводящее к снижению связанного с ним напряжения, а значит, и температуры проводников.
Кроме того, в случае машин, предназначенных для генерирования почти постоянной мощности, с важными изменениями в числе оборотов, возможностью радиального и осевого регулирования положений ярм можно воспользоваться для регулирования значения связанной с этим мощности.
Как будет рассмотрено ниже, опоры статора преимущественно включают в себя устройства качения, такие, как ролики или шарики, выполненные с возможностью качения на внешнем периметре диска 12 для обеспечения поддержания воздушных зазоров 24, 26 между ярмами 16, 18 и магнитами 14 постоянными и компенсирующими осевые и радиальные колебания ротора 12, а также тепловое расширение. Это представляет интерес, в частности, в крупногабаритных машинах, где могут оказаться важными радиальные или осевые смещения, колебания, резонанс, а также механические и тепловые деформации ротора.
Каждое ярмо с его катушками, его опорами и средствами, управляющими смещениями опор, включая любые необходимые датчики положения и температуры, можно рассматривать как элементарную ячейку статора, которая многократно повторена для образования всего устройства в целом, которое вследствие этого имеет модульную конструкцию. Таким образом, можно получить несколько разных компоновок, которые станут очевидными из нижеследующего описания.
Материал ярм 16, 18 магнитов может зависеть от приложений предлагаемого устройства.
Для высокочастотных приложений, предпочтительными материалами являются ферриты с высокой магнитной проницаемостью, низкой остаточной намагниченностью и низким магнитным сопротивлением (феррокерамические материалы). Использование ферритов выгодно по следующим причинам:
ферриты обеспечивают высокую плотность магнитного потока (примерно 1/2 Тесла);
ферриты являются материалами, которые можно спекать, и поэтому они обеспечивают получение конструкций и форм, подходящих для максимизации кпд;
ферриты демонстрируют кривые кпд, максимумы которых оказываются в пределах широкого диапазона частот, даже до нескольких мегагерц, и поэтому предпочтительно совместимы с частотами магнитов в приложениях, предусматриваемых для изобретения;
при заданном высоком удельном электрическом сопротивлении материала, образующего ферриты, и низкой величине остаточного намагничивания с узкой петлей гистерезиса на высоких частотах, возникают очень малые потери в феррокерамическом материале и очень малые электромагнитные потери, вследствие чего увеличивается кпд;
ферриты позволяют преобразовывать энергию, получаемую от паразитных гармоник формы волны сигналов, а это полезно, в частности, для приложений, где требуются большие диаметры и большие числа оборотов;
ферриты имеют малый удельный вес (составляющий примерно половину удельного веса железа), а это важно в авиационных приложениях;
ферриты обладают способностью самозащиты в случае перегрева, потому что их температура Кюри, Тс, является низкой - примерно 250°С. Как известно, магнитная проницаемость ферритов при температуре, превышающей Тс, по существу, равна 0 (см. фиг.25): таким образом, если температура ярма достигает Тс, общее магнитное сопротивление цепи значительно увеличивается и принимает значение, по существу, соответствующее значению для цепи в воздухе, так что соответствующее напряжение уменьшается до очень малых значений. Этим свойством можно воспользоваться как альтернативой смещению ярма.
На относительно низких рабочих частотах - от нескольких герц до нескольких килогерц (например, до 3 кГц) - ярма можно изготавливать из тонких листов кремнистой стали, например, толщиной 5-10 сотых миллиметра. Для частот от 1 кГц до нескольких десятков кГц (например, до 20 кГц), можно вместо этого использовать Ni-Zn0-феррит, такой, как N27 от фирмы EPCOS. Ni-Zn-материалы характеризуются высокими рабочими температурами, очень высоким удельным электрическим сопротивлением (порядка 100 кОм/м) и ограниченными потерями на гистерезис. Могут оказаться подходящими также Mn-Zn-ферриты, такие, как материалы Ferroxcube, описанные выше, например, MnZn 3C90-6 или Mn-Ni-материалы.
Устройство, соответствующее изобретению, может работать как беспроводной генератор и бесщеточный электродвигатель.
Чтобы описать принцип работы устройства 10 в качестве генератора, полезно вспомнить принцип работы трансформатора. В трансформаторе, динамическое изменение напряжения в электрической цепи первичной обмотки вызывает изменение магнитного потока в катушке, через которую протекает ток, причем это изменение индуцируется во всей замкнутой магнитной цепи. Изменение магнитного потока в замкнутой магнитной цепи порождает вторичную эдс, пропорциональную числу витков, во вторичной обмотке.
В случае данного изобретения, изменение магнитного потока происходит за счет приведения диска 12 с магнитами 14 во вращение между ярмами 16, 18 магнитов. В таком случае, пара торцевых магнитных ярм 16, 18 воспринимают изменение магнитного потока благодаря чередующемуся прохождению постоянных магнитов 14 с противоположными полярностями между одними и теми же ярмами, что приводит к индуцированию на катушках 20, 22 эдс, порождающих напряжения V1-V4 (фиг.3). Иными словами, путем приложения вращающего момента к диску 12, в каждой катушке 20a, 20b и 22a, 22b соответственно индуцируется эдс, связанная с изменениями магнитного потока из-за чередования полярностей постоянных магнитов 14. Рассматривая относительные положения магнитов 14 и торцевых поверхностей ярм в кольце, например, ярм 16, показанных на фиг.4, можно заметить, что во время вращения ротора 12 торцевые области постепенно перекрываются, что приводит к, по существу, синусоидальному увеличению магнитного потока, а значит - и индуцируемого напряжения.
Генерируемое напряжение равное -ΔФ/Δt, где ΔΦ - изменение магнитного потока; Δt - время между прохождением магнитов спереди от плеча ярма, зависит от размера ротора 12, количества M магнитов (а следовательно - и количества N диполей) и круговой скорости ротора. При больших дисках роторов, обеспечение большого количества М, высокой частоты прохождения магнитов и высокого напряжения, можно получить даже при относительно малых скоростях вращения.
Более конкретно, в случае синхронной машины, каждая катушка 20, 22 генерирует форму волны сигнала, синфазную с формой волны сигнала других катушек, и образует независимый генератор. Как известно, в зависимости от того, последовательно или параллельно соединены катушки, можно получить напряжение, в 2N раз превосходящее напряжение одиночной катушки, но при том же самом токе, или - после выпрямления - ток, равный сумме токов, но при том же самом напряжении, соответственно. В этом случае, может потребоваться подходящий фильтр.
В случае асинхронной машины, каждая катушка генерирует эдс, которая сдвинута по фазе на ±2π/2N относительно соседней катушки, и за один период вращения диска 12 - после выпрямления сигнала - будут получены 4N полуволн с коэффициентом пульсации, который в 4N раз меньше, чем коэффициент пульсации однофазного сигнала, так что операции фильтрации и сглаживания не требуются. Отметим, что в асинхронной машине количество магнитов и ярм будет преимущественно таким, которое обеспечит получение синусоидальной или аналогичной формы волны сигнала (т.е. можно будет избежать сочетания, когда M=N).
Чтобы оценить рабочие параметры предлагаемого устройства, обратимся к следующему примеру, касающемуся авиационного приложения. Предполагается, что кольцо магнитов 14 имеет радиус примерно 1 м, а шаг магнитов составляет примерно 10 см (и поэтому D составляет примерно 5 см). Если длина окружности несколько больше 6 м, то кольцо может содержать примерно шестьдесят магнитов 14. Если предлагаемое устройство установлено на ступени компрессора в турбине, скорость вращения в общем случае составляет примерно 12000 об/мин, т.е. 200 об/сек. Соответственно, частота прохождения магнитов составляет примерно 12000 Гц, а Δt составляет примерно 80 мкс. Поскольку чем короче время Δt переходного процесса, тем выше индуцируемое напряжение, и будет получена энергия, характеризующаяся высоким напряжением с высокой частотой и малым током. Этот признак дает дополнительные преимущества, поскольку высокое напряжение и высокие частоты позволяют использовать медные провода с уменьшенным размером поперечного сечения для катушек 20, 22, и более того, количество ферромагнитных материалов для передачи и кондиционирования энергии становятся очень малым: это приводит к снижению веса, что важно, в частности, для многих приложений, как будет очевидно из нижеследующего текста.
Устройство 10 может быть использовано обратимым образом в качестве бесщеточного электродвигателя путем приложения изменения напряжения с вращением фазы. Получаемое изменение полярности на противоположную создает силу, прикладываемую к постоянным магнитам 14, которые последовательно приводят диск 12 во вращение. В таком случае, напряжение, приложенное к катушкам, создает пару магнитных потоков с противоположными полярностями, заставляя диск двигаться с тем, чтобы обеспечить расположение магнитов 14 напротив ярм 16, 18 линейным образом и с противоположными полярностями. В случае синхронного электродвигателя, на всех катушках обеспечивается постепенное увеличение фазы для того, чтобы начать движение. В случае асинхронного электродвигателя, управление упрощается благодаря сдвигу фаз между ротором и статором, являющемуся результатом конструкции, и этого будет достаточно для разбалансировки любой из катушек для приведения машины во вращение.
Подобно обычным бесщеточным электродвигателям, детектируются положения магнитов 14 относительно статора 16, 18. Таким образом, как только система достигает состояния устойчивости, схема управления начинает вращение фаз, которое снова вызывает смещение ротора для поиска новой точки устойчивости. Постепенное увеличение частоты управляющих импульсов вызывает ускорение ротора.
Характерными признаками в случае работы в качестве двигателя являются:
большой крутящий момент ускорения: в самом деле, сила прикладывается к периферии диска 12, который может иметь большой радиус (плечо момента); как говорилось, большой радиус обеспечивает установку большого количества магнитных диполей, взаимодействующих при эксплуатации электродвигателя, а это приводит к большой суммарной силе;
большое число оборотов, зависящее от частоты возбуждения предлагаемого устройства (см., например, соображения относительно рабочих параметров, приведенные в связи с работой в качестве генератора).
Помимо этого, как говорилось применительно к генератору, поскольку ротор и статор представляют собой две параллельные поверхности, механическая обработка обеспечивает получение очень малых воздушных зазоров, а следовательно - и высокого кпд.
Отметим, что благодаря модульной конструкции предлагаемого устройства и независимости различных магнитных цепей, в одном и том же устройстве одновременно могут присутствовать функции генератора и электродвигателя, в частности, чередующиеся ячейки могут работать в качестве генератора или в качестве электродвигателя. Таким образом, ячейки-генераторы можно использовать в качестве детекторов положения, чтобы обеспечить обратную связь для функции двигателя. Фактически, ячейка-генератор подает напряжение, которое пропорционально положению магнитов, проходящих перед ним, а поскольку относительное положение ячеек-генераторов и ячеек-электродвигателей известно, можно сразу же получить положение ротора относительно ячейки-генератора и ячейки-электродвигателя. Это обеспечивает регулирование импульса для ячейки-электродвигателя таким образом, что оно имеет точную фазу, требуемую для обеспечения движения в бесщеточной машине.
В качестве альтернативы, можно также предусмотреть обратную связь по положению посредством детекторов на эффекте Холла или посредством вспомогательной обмотки; однако с учетом того, что детекторы на эффекте Холла не работают надлежащим образом при температурах, превышающих 150°C, предпочтительным может оказаться последнее решение.
На фиг.5 и 6 приведены представления, аналогичные фиг.2 и 3, связанные с вариантом осуществления, в котором ротор 12 выполнен из ферромагнитного материала. Идентичные элементы в обеих парах чертежей обозначены одинаковыми позициями. В этом случае, статор содержит единственное кольцо ярм 16 с соответствующими катушками 20a, 20b, находящееся напротив магнитов 14, которые, в свою очередь, приклеены к поверхности ротора 12, обращенной к ярмам 16 (см. фиг.6). Подходящим материалом для приклеивания магнитов 14 к ротору 12 является, например, локтитхизол 9466. Более того, чтобы упростить приклеивание, ротор 12 можно снабдить направляющей из алюминия или смолы (не показана), выполненной с возможностью определения положений магнитов 14 и имеющей функции локализации, упрочнения и предотвращения насыщения. Если приклеивание оказывается неудовлетворительным для того, чтобы выдерживать воздействия центробежных сил при высоких скоростях вращения, можно применять другие меры удержания магнитов в нужном положении, которые будут описаны ниже дополнительно. В этом варианте осуществления, магнитные цепи между парой магнитов 14 и одним ярмом 16 замкнуты через диск 12 и воздушные зазоры 24a, 24b. Более конкретно, как показано на фиг.6, магнитная цепь содержит: N-полюс первого магнита 14; воздушный зазор 24а; ярмо 16 с катушками 20a и 20b; воздушный зазор 24b; S-полюс второго магнита 14; N-полюс второго магнита 14; диск 12; S-полюс первого магнита. Принцип действия этого варианта примера осуществления является таким же, как для примера осуществления, показанного на фиг.1-3, а разница связана лишь с другим количеством катушек.
За счет соединения магнитов, обращенных к одному и тому же ярму, тонкими ферромагнитными листами для замыкания магнитного контура между плечами ярма и парой магнитов, можно также использовать вариант осуществления с единственным кольцом ярм в случае ротора, выполненного из неферромагнитного материала.
Этот вариант примера осуществления улучшает характеристики легкости предлагаемого устройства. На фиг.7 показан еще один вариант осуществления, в котором ярма 16, 18 распределены не по всей окружности диска 12, а лишь по одной или более ее дискретных дуг, в иллюстрируемом примере - по двум. Возможность иметь меньше наборов ярм является одним из преимуществ, обеспечиваемых модульной конструкцией согласно изобретению. Каждый набор может даже включать в себя единственное ярмо. Этот вариант осуществления пригоден для приложений, в которых мощности (для функций как генератора, так и электродвигателя), получаемые набором элементарных ячеек, проходящих по всей окружности, были бы избыточными. Конечно, даже если этот вариант и показан для устройства того типа, которое показано на фиг.1-3, с набором ярм на каждой стороне ротора 12, он также применим к случаю единственного набора ярм, показанного на фиг.5 и 6.
Фиг.8-12 относятся к примеру осуществления изобретения с радиальной компоновкой магнитов и ярм. Элементы, уже рассмотренные со ссылками на предыдущие чертежи, обозначены теми же позициями с добавлением знака штриха.
В примере осуществления, предусматривающем радиальную компоновку, ротор 12′ является цилиндрическим телом, несущим магниты 14′ с чередующимися ориентациями на его боковой поверхности. Подобно примеру осуществления, предусматривающему осевую компоновку, можно предусмотреть два набора ярм 16′, 18′ (фиг.8) или только один набор 16′ либо 18′ (фиг.9 и 10), в зависимости от материала ротора 12′. Ярма имеют радиально направленные плечи, на которых намотаны катушки 20′, 22′. В решении с единственным набором ярм, ярма могут быть размещены либо снаружи, либо внутри ротора 12′, как показано на фиг.9 и 10, соответственно, компоновки, показанные на фиг.9 и 10 будут именоваться компоновками «внутреннего ротора» и «внешнего ротора», соответственно. В примере осуществления, предусматривающем радиальную компоновку, торцевые поверхности ротора и плеч ярм будут иметь одинаковую кривизну в любой точке для гарантии постоянства воздушного зазора.
В компоновке внешнего ротора и в компоновке с двойным набором ярм, ротор 12′ образован на поверхности большой полой цилиндрической камеры, внутри которой установлен единственный или каждый набор ярм. В компоновке внутреннего ротора, ротор 12′ будет по-прежнему кольцом или диском, несомым валом 13′. Кроме того, в варианте осуществления, предусматривающем радиальную компоновку, ярма 16′ и/или 18′ могут быть распределены перед всем кольцом магнитов или только перед одной или более дуг такого кольца.
В варианте, показанном на фиг.11 и 12, боковая поверхность ротора 12′ может нести два соседних и параллельных ряда магнитов 14′a, 14′b (сдвоенная компоновка магнитов), при этом магнит в одном ряду имеет противоположную ориентацию относительно соседнего магнита в другом ряду. Плечи ярма 16′ и/или 18′ обращены к одному магниту 14′a, 14′b в каждом кольце. Как показано на фиг.12, ярма 16′ (только одно из которых показано) могут быть расположены с наклоном относительно образующих кольца ротора, причем оба ряда магнитов сдвинуты друг относительно друга, так что пара магнитов 14′a, 14′b, обращенных к одному и тому же ярму, также располагаются с наклоном относительно образующих кольцо ротора. Этот признак также вносит вклад в уменьшение зубчатости.
Следует понимать, что в сдвоенной компоновке магнитов пары магнитов всегда находятся в одной и той же радиальной плоскости, проходящей через плечи ярма, как в конфигурации синхронной машины, так и в конфигурации асинхронной машины, а плоскости вращения всегда являются общими, как для магнитов, так и для ярм. В таком случае, либо магнитный поток присутствует на плечах ярм, поскольку магниты находятся спереди от ярм, либо имеет место отсутствие протекания потока, поскольку спереди от ярма нет магнита. Это дает важное преимущество, заключающееся в том, что паразитные потери Фуко (т.е. поток в одном плече ярма по-прежнему присутствует и порождает рассеяние в роторе через другое плечо) исключаются, поскольку между плечами нет фазового сдвига. При всех остальных компоновках, наоборот, всегда существует небольшой фазовый сдвиг между плоскостью, проходящей через поперечную ось магнита, и плоскостями, радиально пересекающими плечи ярм, поскольку ярма лежат в плоскостях, между которыми существует фазовый сдвиг на некоторый угол: таким образом, всегда присутствуют некоторые паразитные потери Фуко.
Все соображения о регулируемости ярм, приведены выше по отношению к примерам осуществления, предусматривающим осевую компоновку, применимы и к примерам осуществления, предусматривающим радиальную компоновку, с учетом того, что воздушный зазор теперь является радиальным зазором, а не осевым. Например, чтобы отрегулировать связанную мощность, радиальное смещение ярм обеспечивает изменение воздушного зазора, а продольное смещение ярм относительно оси вращения обеспечивает изменение областей, в которых магниты и ярма перекрываются.
Отметим, что даже если ряд сдвоенных магнитов и компоновка ярм, наклонная относительно магнитов, показаны только для одной из радиальных компоновок, их можно применить и для других радиальных компоновок, описываемых здесь, а также для других вариантов осевой компоновки.
В примерах осуществления, описанных до сих пор, предполагалось, что катушки ярма независимы друг от друга и от катушек других ярм, и отдельно соединены с силовыми драйверами или использующимся устройством. Большое количество ячеек может повлечь за собой большое количество соединений с внешней аппаратурой, а именно, по меньшей мере, два соединения для каждой катушки, и это может быть недостатком в контексте сложности предлагаемого устройства. Для уменьшения количества соединений с внешней аппаратурой можно воспользоваться модульной конструкцией предлагаемого устройства, сохраняя при этом независимые катушки на каждом плече. Рассматривая геометрический аспект предлагаемого устройства в машине с N ярмами (и, следовательно, P=2N плечами или полюсными продолжениями) и М магнитами, можно в общем случае наблюдать ситуацию, в которой заданная геометрическая фаза между полюсами и противолежащими магнитами возникает с периодичностью Х полюсных продолжений, при этом
X = P/нод(P, M),
где «нод» обозначает наибольший общий делитель. Каждая катушка в группе из Х катушек генерирует эдс, сдвинутую по фазе относительно других катушек в группе, а электрические фазы катушек идентично повторяются для всех групп. Катушки с одинаковой фазой можно соединять друг с другом параллельно или последовательно в звезду или треугольник, внутри машины, а их общие точки будут соединены с внешней аппаратурой. Таким образом, количество соединений с внешней аппаратурой уменьшается до количества разных фаз. Поэтому получается модульная многофазная машина, в которой каждый модуль включает в себя Х полюсных продолжений и Y=M/нод(P, M) магнитов. Можно также соединять с внешней аппаратурой катушки чередующихся модулей с инвертированными фазами, так что может быть получена Х-фазная или 2Х-фахная машина с заданной парой значений M, P. Конечно, когда модульная многофазная компоновка применяется для примера осуществления со сдвоенными магнитами, преимущество синхронного потока в обоих плечах ячейки по-прежнему поддерживается. Путем параллельного или последовательного соединения модулей с одинаковой фазой, можно по желанию увеличивать или уменьшать напряжение, вследствие чего достигается такой же результат, как обеспечиваемый смещением ярм.
На фиг.13-15 показаны несколько возможных компоновок с разными парами значений P, M, где M - четное число, меньшее, чем P-2. Эти чертежи относятся к примеру осуществления, предусматривающему радиальную компоновку, но, конечно, те же соображения применимы к примеру осуществления, предусматривающему осевую компоновку.
На фиг.13, P=64, а M=48, так что X=4. Это обеспечивает получение машин либо с четырьмя, либо с восемью фазами, в зависимости от того имеют ли катушки в каждой второй группе из четырех катушек одинаковые фазы или инвертированные фазы относительно соответствующих катушек в соседней группе из четырех катушек.
На фиг.14, P=48, а M=40, так что X=6. Это обеспечивает получение машин либо с шестью, либо с двенадцатью фазами, в зависимости от того имеют ли катушки в каждой второй группе из шести катушек одинаковые фазы или инвертированные фазы относительно соответствующих катушек в соседней группе из шести катушек.
На фиг.15, P=48, а M=32, так что X=3. Можно получать трехфазные или шестифазные машины, в зависимости от того имеют ли катушки в каждой второй группе из трех катушек одинаковые фазы или инвертированные фазы относительно соответствующих катушек в соседней группе из трех катушек.
Другие конфигурации асинхронных машин достижимы при М четном и большем, чем Р.
Это упрощение внешних соединений может быть применимо также в случае синхронной машины, где M=P, так что можно получить катушки с одинаковой фазой, или P/2 катушек с одной фазой и P/2 с инвертированной фазой, и обязательными будут лишь по одному из двух соединений с внешней аппаратурой.
На фиг.13-15 также показана форма полюсных продолжений, обозначенных здесь позицией 7, преимущественная, в частности, для многофазных машин. Обратимся также к показанным в увеличенном масштабе видам на фиг.16(a) и 16(b). Полюсное продолжение 7 имеет укрупненную головку 7а, обращенную к магнитам, промежуточный шток 7b с уменьшенным размером поперечного сечения, на который намотана катушка (обозначенная здесь позицией 21), и основание или ножку 7с для крепления полюсного продолжения 7 к опоре (например, соединительному элементу, описанному выше). Эта форма имеет преимущество, заключающееся в том, что активное ферромагнитное сечение машины увеличено при уменьшении подверженности катушек воздействию вращающихся магнитов. Шток 7b, по существу, имеет форму прямоугольного параллелепипеда, имеющего наибольшие поверхности, перпендикулярные направлению вращения ротора. Ножка 7с полюсных продолжений также может иметь больший размер, чем шток 7b. Полюсные продолжения 7 можно индивидуально крепить к опоре статора с помощью крепежных средств 7d, а ярмо, обозначенное здесь позицией 6, как показано на фиг.16(b), будет содержать два соседних продолжения 7, соединенных в соответствии с их ножками 7с. Индивидуальная установка выгодна тем, что она упрощает намотку катушек. Вместе с тем, боковые поверхности ножки 7с немного наклонены, например, на несколько градусов, так что между осями штоков 7b в ярме существует некоторый угол, открывающийся к ротору. Наклон осей штоков 7b в ярме 6 обеспечивает пространство для намотки катушек относительно большого размера.
Дополнительным решением для уменьшения количества внешних соединений с использованием устройства в качестве генератора, могло бы быть выпрямление формы волны сигналов всех катушек внутри машины и параллельное соединение положительных полюсов, а также отрицательных полюсов, внутри машины таким образом, что потребуется лишь два выходных проводника. Однако такое решение могло бы сделать использование машины в качестве электродвигателя невозможным или исключительно трудным, поскольку все катушки соединены друг с другом. Вместе с тем, фазовой модульностью, описанной со ссылками на фиг.13-15, можно было бы воспользоваться, чтобы оставить некоторые из ячеек не соединенными с выпрямительной структурой и использовать такие ячейки для выполнения функции электродвигателя. Например, рассматривая машину с 48-ю полюсными продолжениями, можно было бы предположить следующую последовательность: три полюсных продолжения 7, соединенных посредством выпрямителей, и одно полюсное продолжение, независимое и обратимое, вследствие чего обеспечивается выпрямление в тридцати трех полюсных продолжениях и их соединение друг с другом, а двенадцать независимых полюсных продолжений распределены по окружности с шагом X=4.
На фиг. 17(a) - 17(d) показан пример осуществления магнитов, подходящий для выдерживания центробежных сил при высоких скоростях вращения, таких, как те, которые приходится учитывать, когда магниты установлены на крыльчатке турбины. Магнит представляет собой прямоугольную пластину 140, основания которой образуют N- и S-полюса магнита, а ее боковая поверхность имеет двойной скос: более конкретно, две противоположные стороны магнита скошены, например, сверху вниз, а другие две стороны имеют обратный скос. Иными словами, сечения в соответствии с двумя плоскостями, перпендикулярными одному из оснований магнита, такие, как плоскости, проходящие через линии C-C и D-D на фиг.17(b), являются двумя взаимно обратными трапециями, как показано на фиг.17(c) и 17(d). Такая форма гарантирует перенос тангенциальных или радиальных механических напряжений сжатия, чтобы использовать большое сопротивление сжатию.
Если необходимо, то в случае магнитов, примыкающих друг к другу, между соседними магнитами поперечно магнитному кольцу можно предусмотреть фиксирующие элементы (не показаны), имеющие дополняющий, по отношению к торцевым сторонам магнитов, скос, а в случае сдвоенной компоновки магнитов, упомянутые элементы можно предусмотреть и в продольном направлении между магнитами в двух рядах.
Отметим, что в варианте примера осуществления согласно фиг.17(a) - 17(d), наклоненной может быть только одна пара боковых граней, так что пластина оказывается, по существу, клиновидной. Помимо этого, такой же эффект клиновидной или выполненной с двумя скосами пластины можно получить с помощью пластин в форме усеченных конусов или пирамид.
Как показано на фиг.18 для устройства с радиальной установкой магнитов и компоновкой внешнего ротора, где используется ярмо 6 согласно фиг.16(b), сопротивление центробежной силе может быть повышено за счет использования упругого фиксирующего элемента 60, работающего в тангенциальном направлении, находящегося между соседними магнитами 140 и выполненного с возможностью приложения механического напряжения сжатия к сторонам магнита для компенсации размерных изменений из-за тангенциальных механических напряжений. Элемент 60 может включать в себя, например, листовую пружину, имеющую центральный участок 60а, прикрепленный к ротору 12′, и две U-образных боковины 60b, проходящие от центрального участка к соответствующему магниту 140, так что концы буквы U, отходят от центрального участка 60a, наклоняются к магнитам. Ясно, что можно предусмотреть либо два ряда фиксирующих элементов 60 - по одному для каждого ряда магнитов, либо один-единственный ряд элементов 60. На фиг.18 дополнительно показано, что соседние ярма 6 могут быть разделены зазором 77, обеспечивающим некоторую степень свободы в связи с возможными механическими помехами, например, из-за теплового расширения. Тот же самый эффект можно было бы получить также путем использования фиксирующих элементов, выполненных из эластомерного материала, например, такого, как Teflon®.
На фиг.19 показан подробно вариант осуществления машины с внутренним ротором, где используются клиновидные магниты 140 с сильно наклоненными стенками. Это решение предназначено для очень больших чисел оборотов. Магниты 140 размещены в посадочных местах 62, сформированных в крае ротора и имеющих, например, в плоскости, перпендикулярной оси вращения ротора 12′, по существу, трапецеидальное поперечное сечение, дополнительное по отношению к соответствующей форме поперечного сечения магнитов, и обернуты в неэлектропроводный лист 66. Другие две стороны магнитов 140 введены в зацепление с зажимами 64, поперечно фиксирующими магниты.
Отметим, что фиг.18 и 19 относятся к сдвоенной компоновке магнитов, а также иллюстрируют тонкие ферромагнитные листы 61, соединяющие магниты, противолежащие одному и тому же ярму.
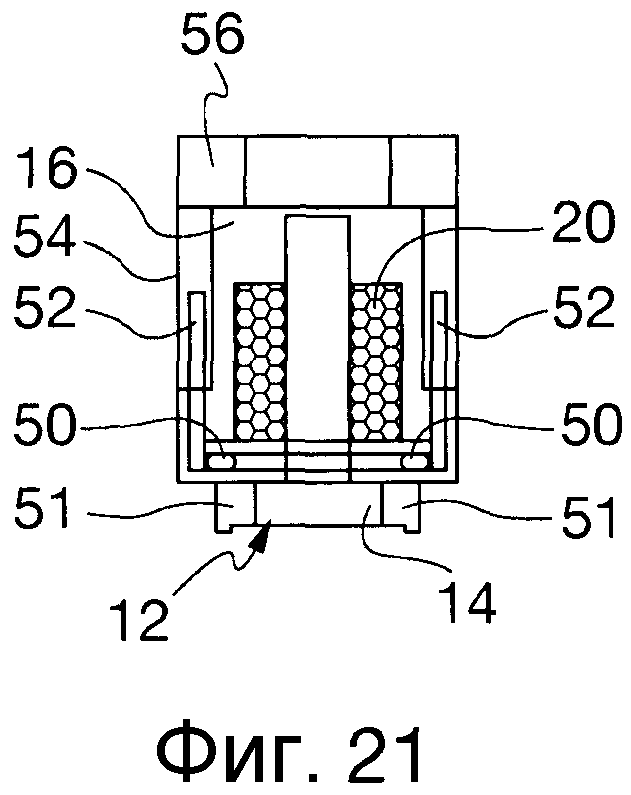
На фиг.20-22 показана возможная опорная конструкция для ярма 16, гарантирующая смещение ячейки и автоматическую компенсацию деформаций или изменений в положении или высоте ротора. На фиг.20 и 21 представлены два принципиальных вида схематического сечения в соответствии с двумя взаимно перпендикулярными плоскостями, а на фиг.22 представлено перспективное изображение, на котором для ясности не показаны некоторые компоненты, изображенные в упомянутых сечениях.
Такая опорная конструкция содержит некоторое количество элементов 50 качения (четыре в иллюстрирующем примере, по два для каждого плеча, см. фиг.22), таких, как шарики, ролики, роликовые или шариковые подшипники, и т.д. Эти элементы выполнены с возможностью качения по должным образом обработанной периферийной области 51 поверхности ротора, работающей как дорожка для элементов качения, и служат для поддержания постоянного воздушного зазора. С этой целью, элементы 50 качения связаны с регулирующими блоками 52 с механическим, гидравлическим или пневматическим приводом, которые в фазе калибровки предлагаемого устройства устанавливаются так, что в нормальных рабочих условиях элементы 50 качения отстоят от ротора 12 и вводятся в контакт с ротором 12 только тогда, когда последний смещается из своего надлежащего рабочего положения либо деформируется. Установка элементов 50 качения производится так, что они несколько выступают относительно плеч, и поэтому остается желаемый воздушный зазор, когда они катятся по ротору. Элементы 50 качения и регулирующие их блоки 52 вместе со связанным с ними ярмом 16 поддерживаются опорной конструкцией 54, которая связана с пружинами 56 сжатия или другими элементами, имеющими те же функции, и откалиброваны для противодействия любому смещению ротора, приводящему к изменению желательного воздушного зазора.
Для придания прочности этой конструкции, всю ячейку, состоящую из ярма 16, 18 с его катушками 20, 22, его опорной конструкцией 54, средствами, вызывающими регулирование положения и, в общем случае, смещениями ярм, описанных выше, и детекторами, вызывающими такие смещения, можно воплотить в слое смолы, как показано позицией 70 на фиг.23, возможно, заключенном в оболочку, не показанную на этом чертеже. Смола может, в возможном варианте, быть заправлена порошками материалов, увеличивающих удельную электро- и/или теплопроводность, таких, как карбид бора и кремния, алюминий или аналогичные материалы.
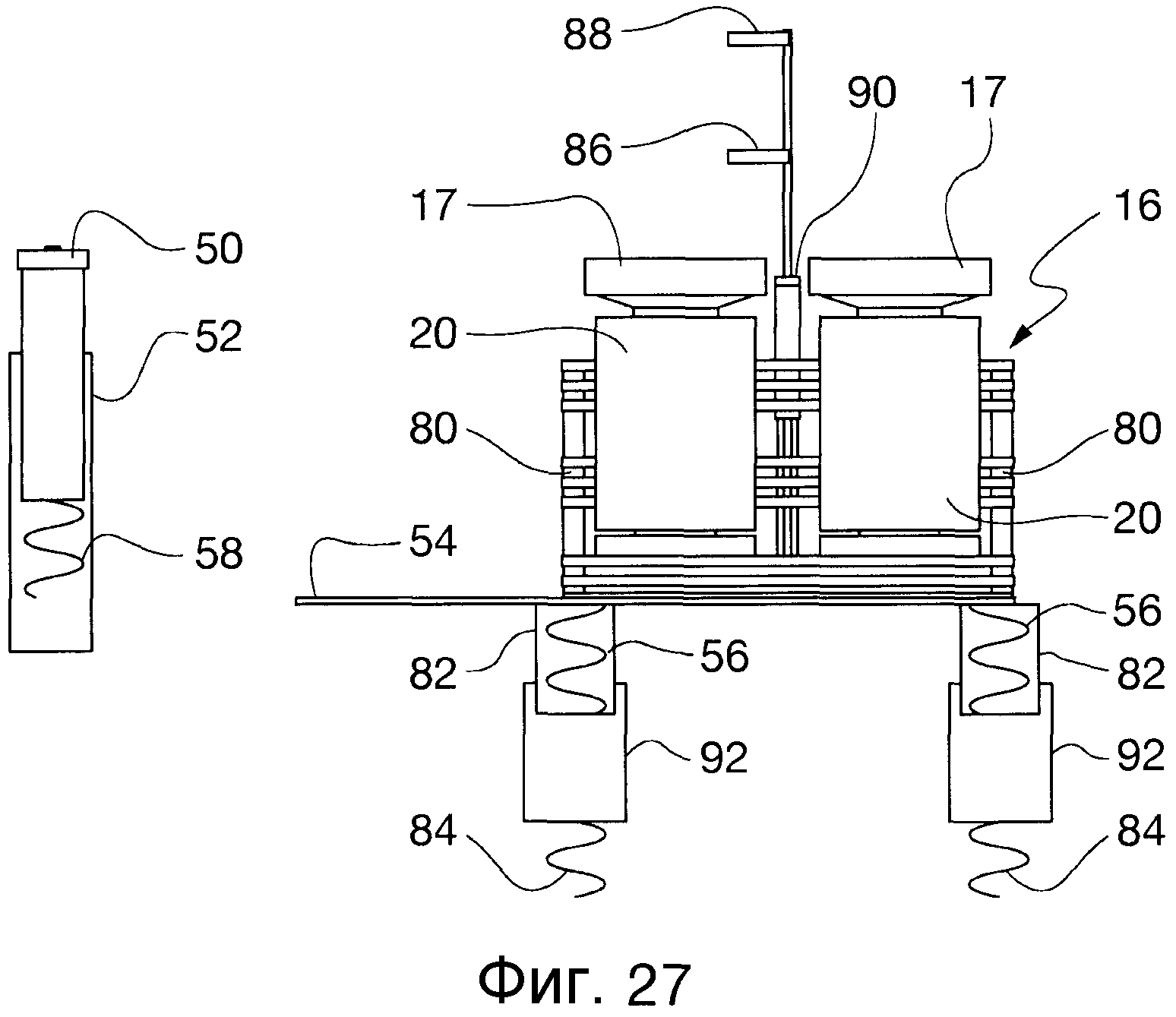
На фиг.27 показано принципиальное воплощение ячейки и ее средства для осевого регулирования. Ярмо, например, ярмо 16, снабжено на своих плечах 17 двумя силовыми катушками 20 и двумя сигнальными катушками 200, которые окружены охлаждающими змеевиками 80. Ячейка дополнительно снабжена детекторами 86, 88 температуры и положения со схемами 90 обработки сигналов и управления. Например, детекторы 86 температуры могут содержать терморезистор с терморегулированием положительного или отрицательного типа, или термопару. Как сказано выше, детекторы 88 положения (этот термин следует понимать как включающий в себя также фазовые детекторы и детекторы частоты вращения) могут быть детекторами на эффекте Холла или даже вспомогательными катушками - первичными источниками питания, используемыми для детектирования фаз и амплитуд токов и напряжений в катушках различных плеч. Отметим, что даже если детекторы 86, 88 и показаны снаружи от ярма из соображений упрощения понимания, они фактически будут находиться внутри ячейки, например, вместе со схемами 90 обработки и управления в месте, которое показано для последних.
Внутри исполнительных цилиндров или поршней 82, установленных с возможностью скольжения внутри цилиндров 92, установлены пружины 56, противодействующие смещениям ротора. Когда предлагаемое устройство не задействовано, поршни 82 полностью отведены внутри цилиндров 92 пружинами 84. В рабочих условиях, цилиндры 92 вызывают выдвижение поршней 82 таким образом, что последние занимают свое статичное рабочее положение. В случае динамического регулирования, подходящий линейный привод, управляемый электронным блоком управления устройства, модулирует толчок, прикладываемый к поршню 82, в зависимости от рабочих требований. За счет дифференцированного воздействия на оба поршня 82, можно получить наклон ячейки. Конечно же, можно использовать любое устройство с гидравлическим, пневматическим или механическим приводом, эквивалентное сборке поршней 82 и цилиндров 92.
Детекторы 86, 88, схемы 90 обработки и управления, а также поршни и цилиндры 82, 92, соединенные с центральным процессором (не показан), который, на основании информации, принимаемой от детекторов, и модели машины, хранимой внутри него, определяет действия, которые надо предпринять, как для регулярной работы машины, так и для процедур защиты. Команды смещения посылаются через подходящие силовые драйверы и исполнительные механизмы, поршни и/или цилиндры 82, 92 которых либо другие регулирующие блоки являются элементами, соединенными с ячейкой.
Цилиндры 82, 92 или эквивалентные блоки также будут предусмотрены для управления поступательным движением или вращением ячейки вдоль или вокруг других осей.
Показан один элемент 50 качения с его регулирующим поршнем 52, а остальная ячейка показана в разобранном виде для ясности чертежа. Элемент 50 качения связан с демпфирующим средством, например, с пружиной 58, компенсирующей удар самого элемента качения о ротор.
Описанные характеристики легкости и высокого кпд, а также - в случае использования в качестве электродвигателя - большого крутящего момента и высокого качества, обеспечивают несколько приложений для устройства, например, таких, как:
авиационный генератор, устанавливаемый на турбине;
пусковой электродвигатель для турбины;
электродвигатель обратной связи для архитектуры турбины;
электродвигатель для движителей морских и воздушных судов;
авиационный движитель для вертикального взлета;
электродвигатель для газотрубопроводов и т.п.;
воздушный генератор;
промышленный генератор общего назначения;
регулятор крутящего момента;
маховик для автомобильных систем;
электромагнитный тормоз с рекуперацией энергии;
активный тормоз.
Такие приложения будут вкратце рассмотрены ниже
Авиационный генератор
Это приложение вызвано потребностью в генерировании электрической энергии на борту воздушных судов. Устройство 10 может быть установлено непосредственно на ступенях с низкой рабочей температурой (в таком случае, лопасти 15, показанные на фиг.2, будут лопастями ступени турбины) и обеспечивает замену обычных генераторов переменного тока, получающих механическую энергию через редуктор скорости, соединенный с осью турбины. Следовательно, генератор согласно изобретению представляет собой решение, совместимое с современными технологиями преобразования электрической энергии посредством импульсных источников питания, которые обеспечивают удаленное управление исполнительными механизмами и устройствами и преобразователями посредством полного электрического распределения. Устройство 10, которое выполнено с возможностью генерирования электрической энергии с высоким напряжением и высокой частотой без непосредственного контакта с турбиной, гарантирует исключение многих недостатков обычных методов. В частности, оно является легким и высоконадежным, имеет большой срок службы, имеет легко наращиваемую модульную конструкцию и требует минимального технического обслуживания. Более того, оно является относительно дешевым, в частности, по сравнению со стоимостью электродвигателя и редуктора.
Пусковой электродвигатель для авиационных приложений и турбин вообще
Устройство в соответствии с изобретением, являясь полностью обратимым, обеспечивает получение также пусковой системы для двигателей на воздушном судне без дополнительного веса и дополнительных затрат, помимо затрат на электронные блоки управления для бесщеточного электродвигателя. В отличие от этого, пусковая система на воздушных судах сейчас зачастую не предусматривается, поскольку она считается тяжеловесной и дорогостоящей, так что фаза зажигания сводится только к фазам парковки воздушного судна, когда можно использовать внешний электродвигатель. Этот выбор ограничивает гибкость и безопасность самого воздушного судна. Те же характеристики легкости и ограниченной стоимости также обеспечивают применение изобретения в качестве пускового электродвигателя для турбин в целом и за пределами области авиастроения.
Электродвигатель обратной связи в архитектурах турбин
Компрессор низкого давления или высокого давления доводится до скорости вращения, которая больше не связана со скоростью вращения вала турбины, а определяется электродвигателем, построенным вокруг компрессора и снаружи от него (завышенная скорость). Это обеспечивает оптимизацию числа оборотов и давлений в компрессорах независимо от ступеней турбины и приводит к расширенным возможностям регулирования для и при оптимизации рабочих параметров и энергопотребления.
Электродвигатель для корабельных движителей
Электрическая тяга для кораблей может сделать возможным применение машин того типа, которого касается изобретение, поскольку такие машины имеют низкий уровень шума, могут быть установлены снаружи от корпуса корабля, и, за счет жесткого соединения с винтом, такие машины можно подвергать угловому смещению относительно продольной оси корпуса корабля, тем самым, обеспечивая высокую маневренность корабля. Использование изобретения в таких приложениях показано на фиг.26, где показан предусматривающий радиальную установку и сдвоенные магниты вариант осуществления устройства 10 в соответствии с изобретением, встроенного в периферию винта 11 корабля. Остов корпуса не изображен, чтобы показать компоновку устройства 10. В таких приложениях, изобретение дает следующие преимущества:
большой крутящий момент в случае больших радиусов и большого количества полюсов благодаря расположению катушек электродвигателя на периферии винта;
возможность индивидуального технического обслуживания и регулирования ячеек;
высокая надежность, поскольку, даже в случае отказа одной ячейки, другие ячейки могут продолжать работу независимо от отказавшей;
возможность работы в неудобных и неблагоприятных средах благодаря герметизации ячеек смолой;
высокий иммунитет к колебаниям винта относительно остова благодаря периферийным элементам качения, которыми оснащены ячейки, поскольку можно поворачивать ячейки относительно винта, поддерживая зазор постоянным.
Электродвигатель для авиационных движителей и авиационный движитель для вертикального взлета
Преимущества большого крутящего момента и высокой надежности позволяют использовать изобретения надлежащим образом и в авиационных движителях. Конструкция авиационного движителя, предусматривающая использование изобретения, является такой, как показано на фиг.26. В таких приложениях, устройство согласно изобретению может работать совместно с блоками генераторов, связанными с термодинамическими машинами, с аккумуляторами, топливными элементами, фотогальваническими элементами, и т.д.
Более того, поскольку винт и кольцо магнитов/ярм можно ориентировать также в горизонтальном положении, например, параллельно поверхности крыла, существует возможность формирования вертикального потока для вертикального взлета; тогда, после взлета, сборку винта и кольца можно привести во вращение, чтобы постепенно перейти к горизонтальному полету. Использование изобретения в таком приложении решает проблемы, связанные с высокими температурами потоков газа в обычных турбинах, тогда как при вертикальной компоновке турбины эти потоки могли бы повредить воздушное судно и взлетно-посадочные полосы.
Электродвигатель для газотрубопроводов и т.п.
Приложение в этой области техники основано на тех же принципах, что и в случае корабельных движителей. Однако в этом случае магниты размещены внутри трубопровода, а ярма размещены на внешнем кольце. Таким образом, гарантированы отсутствие всякого контакта и полная электрическая изоляция между ярмами и движителем внутри трубопровода. Поэтому достигаются высокая надежность и присущая ей высокая степень защиты, которые оказываются подходящими, в частности, для перекачивания газов и углеводородов.
Воздушный генератор
Для таких приложений, лопасти 15 в центральной части диска 12 будут образовывать лопатки воздушного генератора. Это приложение возможно потому, что не возникает проблема с сооружением больших дисков, способных заключать в себе лопатки с размерами, типичными для такого приложения, и вместе с тем обеспечивать пониженный вес. Благодаря большому количеству диполей, которые могут быть установлены на большом диске, и малым потерям магнитной цепи, можно достичь приемлемого кпд любых ветровых условиях. Множество диполей обеспечивает использование этой конструкции для оптимизации компромисса между стоимостью и рабочими параметрами.
Промышленный генератор
Изобретение пригодно для применения в качестве генератора везде, где есть вращающийся вал, поскольку крепление ротора 12 к вращающемуся валу (который тем самым образует вал 13 устройства) является простым, а кольцо магнитных клещей 16, 18 можно заключать в кожух независимо, ввиду отсутствия какого бы то ни было механического соединении с вращающимся элементом. Изобретение пригодно, в частности, для применения в связи с турбинами для выработки энергии, поскольку элементы, образующие устройство 10, можно легко встроить в саму турбину.
Регулятор крутящего момента постоянного тока
Это приложение требует также, чтобы все ярма 16, 18 были установлены с возможностью вращения. Если к устройству 10 прикладывается напряжение постоянной полярности, магниты 14 стабильно располагаются в состоянии равновесия спереди от магнитных ярм 16, 18. Таким образом, за счет вращения внешней части, несущей ярма 16, 18, формируется аналогичное вращение в модуле 12 ротора, несущем магниты 14. Это совместное вращение статора и ротора продолжается до тех пор, пока не достигается максимальный крутящий момент, который задается произведением тангенциальной силы, совместно прикладываемой к диску и ярмам, посредством плеча (радиус кольца магнитов), после чего начинается скольжение с постоянным крутящим моментом. В этом случае, если требуется большое число оборотов при постоянном крутящем моменте, то необходимо предусмотреть вращающийся коллектор, чтобы обеспечить протекание тока во время вращения.
За счет изменения уровня напряжения, связанная с ним сила изменяется до тех пор, пока не происходит насыщение ферромагнитной цепи.
Регулятор крутящего момента переменного тока
В этом случае, устройство, соответствующее изобретению, работает так, как описано в связи с электродвигателем: в дополнение к вышеизложенному, в конце такта приведения во вращение устройство останавливается, а приложенный крутящий момент обнуляется - подобно случаю регулятора крутящего момента постоянного тока. В этом случае, однако, от вращающихся коллекторов не требуется обеспечивать протекание тока.
Регуляторы крутящего момента постоянного тока или переменного тока, предусматривающие применение изобретения, можно использовать, например, в машинах для завинчивания крышек бутылок, так как эти машины должны работать с постоянным крутящим моментом даже тогда, когда резьба полностью завинчена. Такое требование является строго соблюдаемым, в частности, в области производства пищевых продуктов и в химической фармацевтической промышленности.
Электромагнитный маховик
Важным приложением изобретения является рекуперация энергии во время замедления, осуществляемая посредством преобразования механической энергии в электрическую энергию, накопления электрической энергии в смешанные аккумуляторные системы (т.е. системы, включающие в себя устройства, срабатывающие в разные моменты и имеющие разные характеристики аккумулирования и отдачи) и возврата ее - благодаря обратимости устройств - в качестве механической энергии во время фазы замедления. Предлагаемое устройство работает, по существу, как электромагнитный маховик.
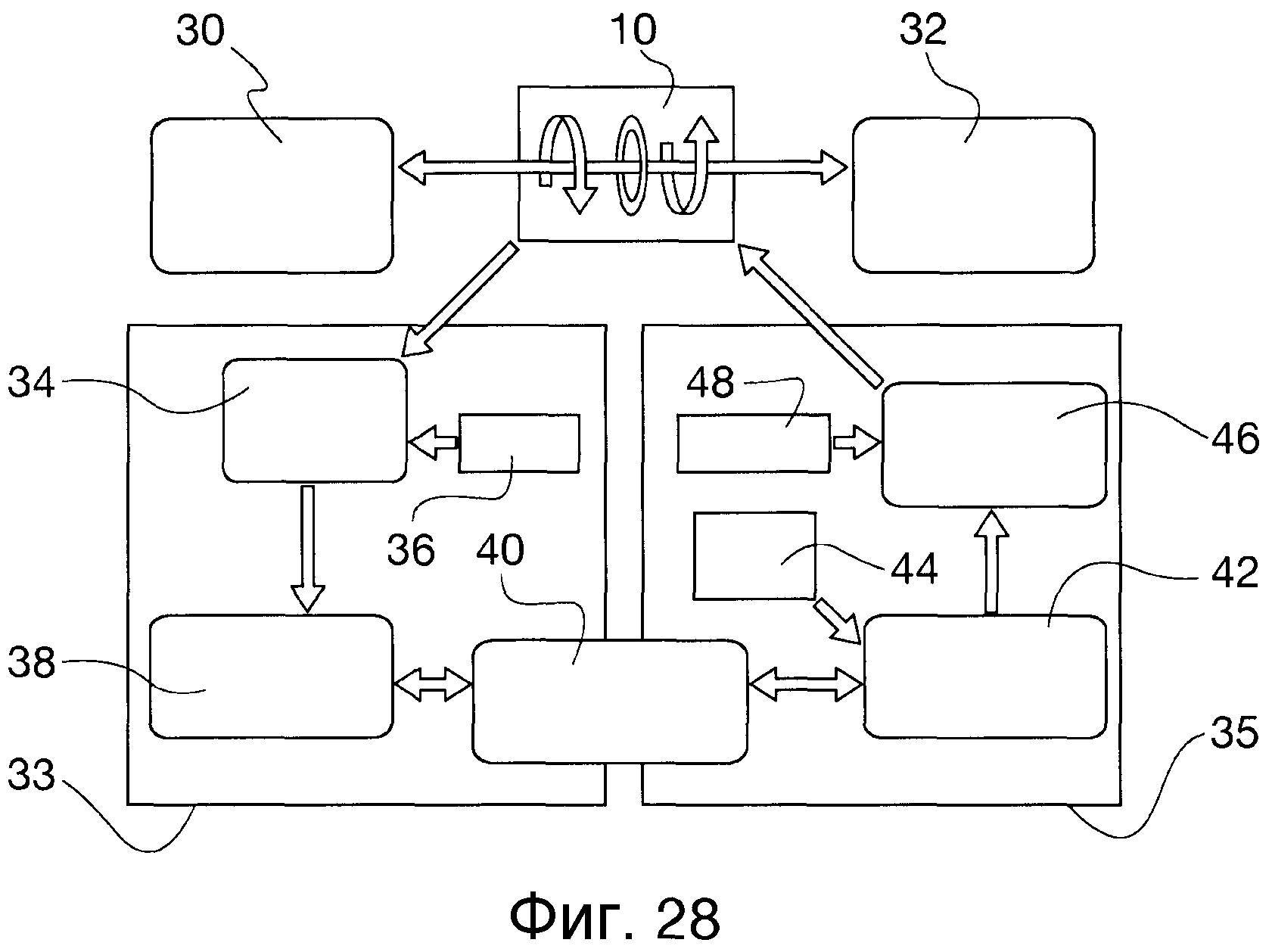
Конструкция системы, в которой устройство, соответствующее изобретению, используется как электромагнитный маховик, схематически показана на фиг.28.
При такой конструкции, электромагнитный маховик, т.е. устройство 10, устанавливается на приводном валу между двигателем 30 и нагрузкой и находится в кинематической цепочке перед редуктором 32. В таких условиях, маховик 10 вращается непосредственно с той же скоростью, что и приводной вал (обычно составляющей от 1000 до 20000 об/мин и более). Кроме того, маховик 10 можно расположить поперек оси двигателя по центру автомобиля, тем самым минимизируя гироскопические эффекты, которые однако являются малыми, так как движущийся элемент (ротор) имеет малый момент инерции.
Маховик 10 соединен одной стороной с блоками, которые - в целом - образуют узел 33 рекуперации энергии, а другой стороной - с блоками, которые - в целом - образуют узел 35 подачи энергии. Узлы 33, 35 соединены со входом и выходом, соответственно, аккумулятора 40, который, как уже говорилось, может быть смешанной аккумуляторной системой. Узел 33 рекуперации энергии содержит инвертор 34, который может быть подсоединен между маховиком 10 и генератором 38 тока путем блока 36 управления тормозом. Тогда генератор 38 тока питает аккумулятор 40. Узел 35 подачи энергии, в свою очередь, содержит регулятор 42 фазы, соединенный с аккумулятором 40 и управляемый кодером 44 положения маховика, и блоки 46 коррекции бесщеточного электродвигателя, которые могут быть соединены с маховиком 10 посредством блока 48 управления акселератором.
В нерабочем состоянии (т.е. когда блок 36 управления тормозом не работает), катушки 20, 22 (фиг.1-3) поддерживаются в условиях разомкнутой цепи и отодвинуты от ротора 12, тем самым, увеличивая воздушный зазор, чтобы аннулировать воздействия тормозов во время нормальной работы, так что противоэлектродвижущая сила обратной связи, по существу, равна 0. Во время фазы торможения или рекуперации, электрическая цепь катушек замкнута на инверторе 34, что обуславливает протекание тока и генерирование противоэлектродвижущей силы на диске 12 маховика 10. Более того, оба кольца ярм 16, 18 перемещаются ближе к диску 12, так что устройство работает с минимальным воздушным зазором, а значит - с максимальной противоэлектродвижущей силой. Эта сила вызывает уменьшение кинетической энергии, вследствие чего происходит торможение транспортного средства и одновременно генерирование высокочастотной электрической энергии, которая преобразуется генератором 38 тока таким образом, что ее можно запасать в аккумуляторе 40.
Во время ускорения, активизируется процесс обращенной подачи. В этой фазе, маховик работает как бесщеточный электродвигатель. Когда активизируется блок 48 управления акселератором, происходит изменение напряжения с вращением фаз, и тогда инверсия полярности индуцирует силу на постоянных магнитах 14, которые приводят диск 12 во вращение. Для остальной части работы применимы соображения, уже изложенные в связи с работой устройства в качестве электродвигателя. Современные технологии также обеспечивают подачу больших количеств энергии за короткое время: это гарантирует достижение - во время фазы подачи - очень больших крутящих моментов ускорения и очень крутых кривых отклика электродвигателя.
Электромагнитный тормоз
Устройство 10 в соответствии с изобретением, установленное между термодинамическим двигателем 20 и блоками 32 трансмиссии транспортного средства, как показано на фиг.28, также может работать как электромагнитный тормоз. В таком приложении, во время нормальной работы, катушки 20, 22 (фиг.1-3) поддерживаются в условиях разомкнутой цепи, а ярма 16, 18 поддерживаются на большом расстоянии от ротора, как и в вышеописанном случае, так что противоэлектродвижущая сила обратной связи, по существу, равна 0. При торможении, ярма перемещаются ближе к ротору, чем до этого, и электрическая цепь катушек замыкается на резистивную нагрузку (а не замыкаются на инвертор, как в случае маховика), и энергия торможения преобразуется в тепловую энергию, а противоэлектродвижущая сила торможения воздействует на диск.
Активный тормоз
Другое возможное применение изобретения - в качестве активного тормоза. Этот принцип является развитием того, который описан для маховика, и предусматривает, что в данном случае аккумулирование энергии имеет место также во время нормальной работы в фазе движения транспортного средства. Во время фазы торможения, цепь катушек 20, 22 не только замкнута на нагрузку, но и также возбуждается, так что устройство работает как электродвигатель, вращающийся в противоположную сторону: тогда энергия протекает от аккумулятора 40 (фиг.28) к тормозному устройству, тем самым, сокращая время торможения. За счет расположения устройства 10 на оси каждого колеса, можно также избежать полного заклинивания колес: при торможении, действие активного торможения можно независимо распределять на каждое колесо благодаря возможности осевого регулирования относительного положения ротора и статора, а противодействие вращению можно обеспечить дифференцированно, т.е. так, что оно окажется подходящим для компенсации несбалансированных нагрузок, типичных для аварийного торможения. Преимущества генератора согласно такому приложению связаны с большим крутящим моментом предлагаемого устройства, быстротой вмешательства и малым потреблением мощности, поскольку энергия, о которой идет речь, является высокой, но - лишь на протяжении коротких периодов.
Ясно, что вышеизложенное описание приведено только в качестве неограничительного примера и что в рамках объема притязаний изобретения в описанные примеры осуществления можно внести изменения и модификации, особенно - в связи с формами, размерами, материалами, типами компонентов и т.п. Например, также когда ярма, а значит - и ячейки, образуют полное кольцо перед ротором, они не обязательно должны быть равномерно распределены по окружности ротора. Это неравномерное распределение полезно при уменьшении зубчатости, а также когда устройство содержит модули и генератора, и электродвигателя, либо имеет многофазную конструкцию. При необходимости, неравномерное распределение ячеек статора может быть электрически скомпенсировано системой управления устройства. Кроме того, помимо вышеупомянутых, возможны и другие приложения.
Реферат
Изобретение относится к электротехнике. Технический результат состоит в повышении кпд устройства и обеспечении максимальной рабочей гибкости за счет регулировки и оптимизации положения статора и ротора. Для этого электромагнитное устройство имеет статор и ротор, вращающийся между обращенными к нему поверхностями статора и несущий множество магнитов, распределенных через одинаковые интервалы вдоль его периферии. Магниты расположены так, что они образуют на поверхностях ротора последовательность чередующихся противоположных полюсов, направленных к статору, при этом статор содержит два набора независимо поддерживаемых магнитных ярм, находящихся по обе стороны от ротора перед магнитами. Магнитные ярма имеют два ориентированных в осевом направлении плеча, торцевые поверхности которых, когда ротор находится в неподвижном состоянии, по меньшей мере, частично обращены к паре последовательных магнитов на одной и той же поверхности ротора. 24 з.п. ф-лы, 28 ил.
Формула
2N, где N - количество магнитных ярм (16, 18; 16′, 18′; 6) в единственном или каждом наборе; четного числа, отличающегося от 2N.
Комментарии