Способ оптимизированной культивации/обработки сельскохозяйственных площадей - RU2352090C2
Код документа: RU2352090C2
Чертежи
Описание
Изобретение относится к способу оптимизированной, в частности энергосберегающей, культивации/обработки сельскохозяйственных площадей при помощи орудия, имеющего прорезающие и обрабатывающие почву почвообрабатывающие рабочие органы.
Орудия такого типа известны на практике. Они применяются либо только для обработки почвы, либо для обработки почвы в сочетании с одновременным внесением семян. Известна сеялка, которая имеет сошники с отходящими вбок лопастями для прорезания почвы. Лопасти можно устанавливать под различными углами к поверхности почвы путем регулировки несущих стоек сошников. При установке лопастей под малым углом прорезается только почва и разрезаются сорные растения, а при установке лопастей под большим углом к поверхности почвы она дополнительно перепахивается, перерывается или переворачивается. В этом случае происходят интенсивная обработка и перемешивание почвы.
На тех местах обрабатываемого поля, которые заняты сравнительно небольшим количеством сорняков, желательно только прорезать почву и разрезать сорняки, а там, где заполненность сорняками больше или большая, желательно обрабатывать почву более интенсивно.
До настоящего времени фермер или тракторист должен был во время движения управлять орудием вручную, определяя визуально заполненность поля сорняками и устанавливая в соответствии с этой определенной визуально заполненностью сорняками лопасти сошников. Поэтому такую работу могли выполнять только специалисты.
Из DE 68917436 Т2 известно устройство для внесения жидких химических средств обработки растений на сельскохозяйственных площадях. Это орудие имеет трубопровод с распыливающими наконечниками. Трубопровод с распыливающими наконечниками снабжен расположенными на расстоянии друг от друга соплами, к которым через подающее и дозирующее устройство подводятся жидкие средства защиты растений, подлежащие внесению в почву. Перед соплами установлены датчики для определения специфической для места заполненности растениями и сорняками. При помощи этих датчиков можно определять заполненность растениями и сорняками и в соответствии с этим управлять внесением средств защиты растений.
В основе изобретения лежит задача устанавливать почвообрабатывающие рабочие органы так, чтобы обеспечить эффективность обработки, соответствующую заполненности растениями и сорняками, и расходовать на обработку почвы для уничтожения растений и сорняков только необходимую для этого энергию.
Согласно изобретению эта задача решена в способе, описанном в п.1 формулы изобретения. Благодаря этим мерам при проезде по полю во время обработки почвы или перед обработкой почвы почвообрабатывающими рабочими органами, выполненными с возможностью регулировки их режима работы и/или интенсивности работы в соответствии со специфической для места заполненностью растениями и/или сорняками, путем зондирования поверхности поля датчиками определяют заполненность растениями и сорняками. В соответствии с этими определенными значениями почвообрабатывающие рабочие органы устанавливают в соответствии с регулировочными значениями параметрами, вычисленными бортовым компьютером, при помощи регулировочных средств, которые управляются от бортового компьютера. Затем производят обработку почвы, которая безусловно необходима для данной заполненности растениями и сорняками обрабатываемого места. Благодаря этому достигается энергосберегающая обработка почвы.
Согласно одному варианту осуществления изобретения специфическую для места заполненность растениями и/или сорняками определяют при помощи датчиков, а полученные в соответствии с этим регулировочные значения для почвообрабатывающих рабочих органов определяют в реальном времени во время культивации/обработки сельскохозяйственных площадей. Благодаря этому при помощи датчиков и бортового компьютера непосредственно в реальном времени определяют регулировочные значения и соответственно устанавливают почвообрабатывающие рабочие органы. Регулировочные значения можно записывать на носитель информации и затем использовать на последующих этапах обработки.
Согласно другому варианту данные о специфической для места заполненности растениями и/или сорняками определяют посредством датчиков при отдельном проезде через поле и записывают на носитель информации.
To есть сначала проезжают по полю и определяют заполненность его растениями и сорняками, записывая соответствующие данные на носитель информации. Затем в соответствии с определенными и записанными данными определяют регулировочные значения для регулировочных средств почвообрабатывающих рабочих органов для их установки в соответствующее положение.
Согласно п.6 формулы изобретения предложено орудие для осуществления способа, содержащее вертикальные несущие стойки с почвообрабатывающими рабочими органами, имеющими на их нижних концах лопасти сошников, выступающие в боковом направлении от несущих стоек и снабженные режущими кромками, при этом несущие стойки выполнены каждая с возможностью поворота вокруг оси поворота, проходящей поперек к направлению обработки орудием, и установлены в различных положениях на раме орудия, а между несущими стойками и рамой расположены регулировочные средства. При помощи этого орудия можно выполнять специфическую для данного места обработку почвы в соответствии с заполненностью этого места растениями и сорняками. Для этого почвообрабатывающие рабочие органы выполнены с возможностью регулировки их положения относительно почвы при помощи регулировочных средств в соответствии с регулировочными значениями, полученными на основе специфической для места заполненности растениями и сорняками. Чтобы можно было обрабатывать поле в соответствии с заполненностью растениями и сорняками простым образом, лопасти сошников при небольшой заполненности растениями и/или сорняками устанавливаются под меньшим углом к поверхности почвы, чем при большей заполненности растениями и/или сорняками.
Дальнейшие особенности изобретения раскрыты в описании примера его осуществления и на чертежах, на которых
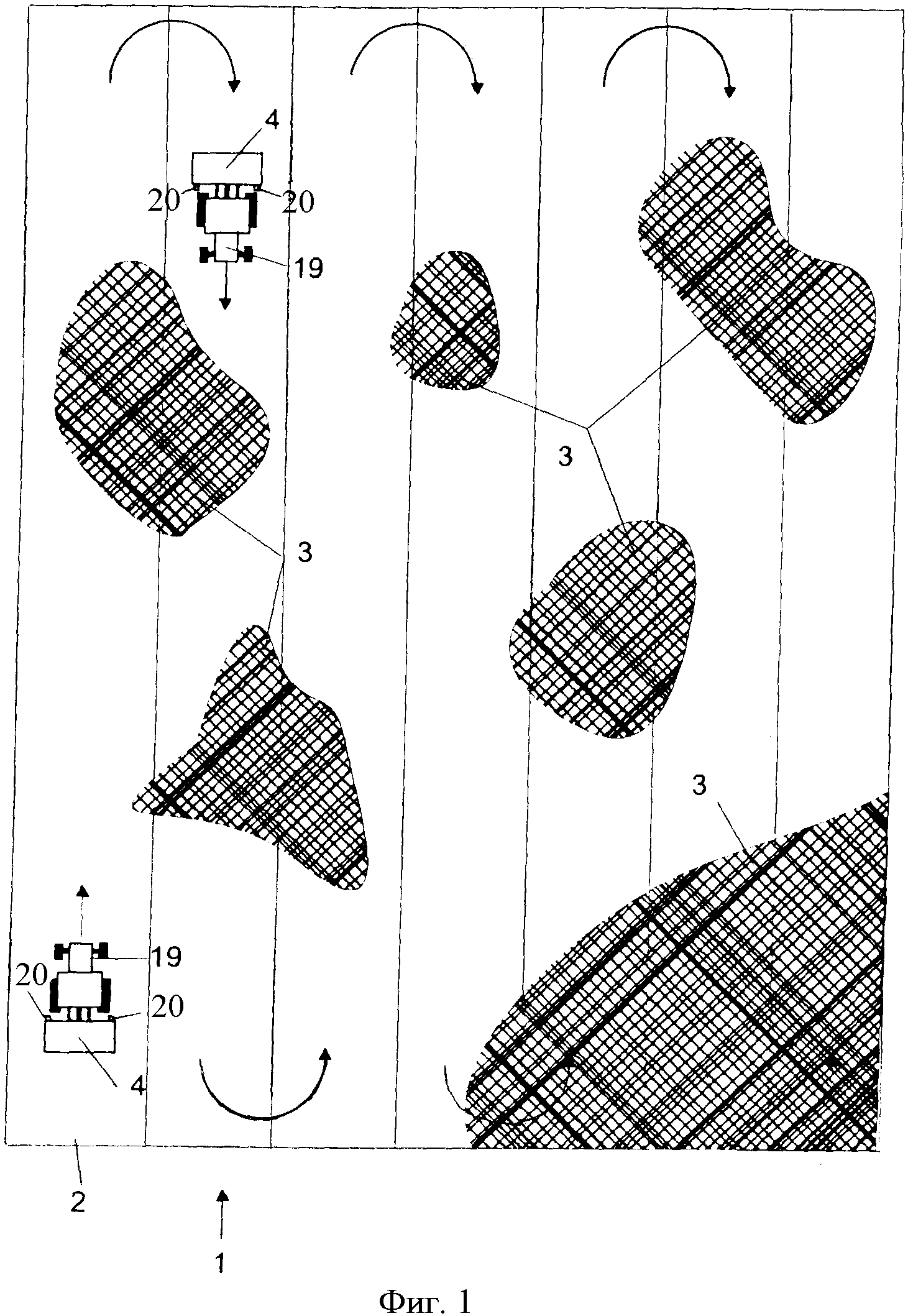
фиг.1 схематично изображает пример обрабатываемого поля с участками, имеющими разную заполненность сорняками,
фиг.2 - сошниковый узел сеялки на виде сбоку.
На фиг.1 показано поле 1 с разной заполненностью сорняками. Незаштрихованный участок 2 поля 1 имеет нулевую или малую заполненность растениями и сорняками, а заштрихованные участки 3 имеют более высокую заполненность растениями и/или сорняками.
Обработка поля 1 описана ниже.
Поле 1 должно обрабатываться сельскохозяйственным орудием, например сеялкой 4, содержащей сошниковые узлы 5 согласно фиг.2. Сошниковые узлы 5 расположены в нескольких поперечных рядах и на расстоянии друг от друга.
Сеялка 4 имеет раму 6, на которой в нескольких поперечных рядах друг за другом и с боковым смещением друг от друга установлено несколько сошниковых узлов 5. Сошниковый узел 5 содержит сошник 7, представляющий собой почвообрабатывающий рабочий орган. Сошник 7 имеет подрезающие почву лопасти 9, выступающие в обе стороны от несущей стойки или держателя 8 сошника 7. За держателем 8 сошника оканчиваются семяпроводы 10, через которые к сошникам 7 из приемного бункера через дозирующее устройство (не показано) известным образом подаются семена. Сошники 3 шарнирно присоединены своим держателем 8 к промежуточному держателю 11 на раме 6. Между промежуточным держателем 11 и держателем 8 сошника расположено регулировочное средство в виде гидравлического цилиндра 12 двойного действия, с помощью которого можно устанавливать угол врезания лопастей 9 в почву в соответствии с концевыми упорами 14, установленными на упорной планке 13. Установка угла врезания более подробно описана ниже. Перед сошником 7 на промежуточном держателе 11 при помощи поддерживающего рычага 15 установлен с возможностью изменения положения по высоте направляющий на глубине каток 16. Между промежуточным держателем 11 и поддерживающим рычагом 15 направляющего на глубине катка 16 установлен регулировочный ходовой винт 17, при помощи которого можно изменять положение направляющего на глубине катка 16 относительно сошника 7 и промежуточного держателя 11. Направляющий на глубине каток 16 задает глубину внедрения сошника 7 или его лопастей 9 в почву. За сошником 7 на расстоянии от него и на одной линии с ним может быть установлен каток 18 для семян, который показан штриховыми линиями.
Сошники 7, как указано выше, установлены на раме 6 сеялки 4 с возможностью перемещения по высоте и могут подниматься относительно почвы с помощью подъемного устройства (не показано) для поворота сеялки 4 в конце поля и для ее транспортировки.
На передней стороне сеялки 4 установлены датчики 20 для определения заполненности поля растениями и сорняками. Датчики 20 могут быть также установлены на тракторе 19, тянущем орудие, которое в данном примере представляет собой сеялку 4. Датчики 20 зондируют поверхность 2, 3 поля и определяют заполненность растениями и сорняками. Определенные датчиками 20 данные передаются на бортовой компьютер, который анализирует их и определяет заполненность 2, 3 растениями и сорняками. В носителе информации бортового компьютера хранится анализирующая программа, при помощи которой определяют заполненность 2, 3 поля 1 растениями и сорняками. Соответствующие данные связывают со специфическими для места данными, которые определяются, например, при помощи локационной системы, и могут записываться на носитель информации соответствующим образом сопоставленными. Локационной системой может быть, например, система DGPS. Определение заполненности 2, 3 растениями и сорняками при помощи датчиков 20 и определение полученных в результате регулировочных значений для почвообрабатывающих рабочих органов 5 может осуществляться в реальном времени во время культивации/обработки сельскохозяйственных площадей.
Возможен также вариант, когда данные о специфической для места заполненности 2, 3 растениями и сорняками определяют при помощи датчиков 20 во время отдельного, не связанного с обработкой, проезда через поле 1 и записывают на носитель информации. Затем во время культивации и обработки поля 1 эти сохраненные данные извлекают.
В соответствии с определенными при помощи датчиков 20 данными о заполненности 2, 3 растениями и сорняками и данными, определенными заложенной в бортовой компьютер анализирующей программой, определяют регулировочные значения. По этим регулировочным значениям лопасти сошников устанавливают в положение, соответствующее заполненности данного места сорняками.
Например, может быть предусмотрена возможность выбора между двумя значениями, т.е. на участке 2, заполненном сорняками в меньшей степени, лопасти 9 сошников устанавливают под меньшим углом, чем на участке 3, заполненном растениями и сорняками в большей степени. Эти данные для угла установки лопастей 9 определяют при помощи анализирующей программы, заложенной в бортовой компьютер. По этим данным определяют регулировочные значения и по ним устанавливают лопасти 9 сошников в соответствии с заполненностью 2, 3 сорняками конкретного места.
Установку лопастей сошников осуществляют следующим образом. Как указано выше, при помощи упоров 14 можно изменять диапазон регулировки держателя 8 сошника для установки угла резания лопастей 9 посредством цилиндра 12 двойного действия. То есть угол врезания или угол резания лопастей 9 сошников относительно почвы является изменяемым. Как показано на фиг.2 сплошными линиями, для введения сошников 7 в почву устанавливают больший угол врезания. Когда лопасти 9 сошника 7 вошли в почву, при помощи гидравлического цилиндра 12 поворачивают держатель 8 сошника, чтобы лопасти 9 приняли положение 9', показанное штрихпунктирными линиями. Таким образом, для введения лопастей 9 сошника в почву устанавливают больший угол врезания или угол резания лопастей 9, а после введения лопастей 9 в почву угол их врезания или резания уменьшают. То есть после введения лопастей сошника в почву для внесения в почву семян устанавливают малый угол врезания или угол резания лопастей 9'.
Сеялка может также применяться в качестве культиватора, когда семена не вносят, а только обрабатывают почву. В этом случае устанавливают большой угол врезания или угол резания лопастей 9, который может предварительно определяться посредством упоров 14. При большом угле установки лопасти 9 почва сильно перерывается и переворачивается. Благодаря этому осуществляется как уничтожение сорняков, так и активная обработка почвы.
Держатели 8 сошников могут быть жестко закреплены на поперечной балке (не показано). Эта поперечная балка проходит поперек к направлению движения, при этом на одной поперечной балке установлено несколько сошниковых узлов 5. Поперечная балка установлена на раме с возможностью поворота вместе с держателями 8 сошников вокруг оси поворота, проходящей поперек к направлению движения. Для поворота поперечной балки служат расположенные между ней и рамой и снабженные двигателем исполнительные элементы, например гидравлические цилиндры двойного действия. Эта регулировка при помощи упорных элементов может быть выполнена в соответствии с индивидуальной способностью держателей сошников согласно фиг.2 к регулировке.
Описанная выше сеялка используется, как указано выше, для обработки поля, показанного на фиг.1. Обработка поля осуществляется следующим образом.
При помощи датчиков 20 определяют заполненность 2, 3 площади 1 растениями и сорняками. В соответствии с полученными значениями, как описано выше, устанавливают лопасти 9 сошников. Поле 1 обрабатывают посредством орудия 4 полосами, как схематично показано на фиг.1. На участках 2 сошники 9 устанавливают таким образом, что их лопасти 9 образуют лишь небольшой угол с поверхностью почвы, т.е. на участках 2, где растения и сорняки отсутствуют (нулевая заполненность) или их мало (малая заполненность), лопасти только прорезают почву, а на участках 3 с большей или большой заполненностью растениями и сорняками лопасти 9' устанавливают при помощи гидравлического цилиндра 12, управляемого от бортового компьютера, под большим углом к поверхности почвы, так что почва на участках 3 обрабатывается и перерывается, т.е. интенсивно обрабатывается. При этом установка сошников 5 сеялки осуществляется либо участками, либо индивидуально, в зависимости от того, насколько широки или на каком расстоянии находятся участки 2, 3 с соответственно большей или меньшей заполненностью сорняками и растениями.
Описанный выше способ обработки поля 1, имеющего участки 2 и 3 с сорняками и растениями, можно также осуществлять не с помощью сеялки, а с помощью культиватора, имеющего лапу с лопастями.
Реферат
Группа изобретений относится к сельскому хозяйству. Способ осуществляется при помощи орудия с прорезающими и обрабатывающими почву рабочими органами. Рабочие органы выполнены с возможностью регулировки их режима работы и/или интенсивности работы в соответствии со специфической для места заполненностью растениями и/или сорняками при помощи снабженных двигателем регулировочных элементов. Регулировочные значения для регулировочных элементов определяют в соответствии с заполненностью растениями и/или сорняками путем зондирования поверхности поля датчиками. Данные от датчиков передают на бортовой компьютер и анализируют при помощи анализирующей программы, заложенной в носитель информации. На основе определенных регулировочных значений регулируют положение почвообрабатывающих рабочих органов при помощи регулировочных средств. Изобретения обеспечивают эффективную обработку почвы с минимальными затратами энергии. 2 н. и 5 з.п. ф-лы, 2 ил.