Система энергообмена для преобразования различных видов энергии - RU2141912C1
Код документа: RU2141912C1
Чертежи









Описание
Изобретение относится к системе энергообмена для преобразования различных видов энергии, в частности, гидравлической в электрическую и наоборот для энергоснабжения транспортного средства, причем двунаправленно преобразуемым и по выбору применяемым видом энергии осуществляется питание электрической (электрическими) или гидравлической (гидравлическими) энергосистемы (энергосистем) на борту транспортного средства, предпочтительно на борту самолета.
В бортовых энергосистемах известных транспортных систем их эксплуатационная надежность наиболее последовательно обеспечивается автономно работающими источниками энергии, вырабатываемой (отдаваемой) гидравлической и (или) электрической энергией (мощностью) которых постоянно пользуются установленные в системе потребители самых различных энергосистем, обуславливающих уровень надежности. К их числу относятся (установленные в данном транспортном средстве) гидравлические системы для приведения в действие исполнительных органов (для управления транспортным средством), а также электрические и электронные системы, в особенности энергетические и вычислительные агрегаты (компьютеры) (для навигации и коммуникации или для управления транспортным средством). Эти защищенные от отказов гидравлические и электрические бортовые энергосистемы традиционного рода состоят (обычно) из резервированных (избыточных) независимых источников энергии (генераторов или насосов), которые предусмотрены в каждой силовой установке транспортного средства и питают распределительную систему, главным образом через сборную шину трехфазного тока (AC-BUS BAR) или через гидравлическую сеть.
Для этого в транспортных средствах применяются системные решения для электрических и гидравлических бортовых систем, которые подробнее описываются ниже с помощью упрощенных схем.
Одно из этих системных решений относится к типичной бортовой энергетической системе для транспортного средства с четырьмя силовыми установками, каждая из которых несет генератор трехфазного тока со встроенным генератором постоянной частоты вращения (integrated drive generator), отдающим в нормальном случае электроэнергию в предназначенную для него сборную шину трехфазного тока (AC BUS). При отказе одной или нескольких из этих силовых установок или одного либо нескольких (находящихся на силовых установках) генераторов имеется (лишь) возможность при помощи (установленного за генераторами) переключателя сборных шин отключить (изолировать) их от соответствующей питаемой генератором главной сборной шины.
Питаемые генератором главные сборные шины соединены друг с другом поперек (горизонтально) посредством других отключаемых сборных шин. Тогда (при неполадке в силовой установке или отказе отдельных генераторов) важные потребители электроэнергии питаются энергией поперек через переключатель сборных шин между другими сборными шинами и, поэтому, получают питание от соответствующих питаемых генераторов главных сборных шин. Внутри таких энергосистем смонтированы известные аппараты, которые внутри электрической бортовой системы работают в качестве генераторов аварийного энергоснабжения. Эти аппараты (CSMG (constant speed motor generator)) дают возможность превращать гидравлическую энергию в электрическую, которая подается в сборную шину трехфазного тока (AC ESS (essential)) для питания особо важных потребителей энергии. Первичная энергия для такого (учитываемого в представленном системном решении) генератора аварийного энергоснабжения забирается с одной (из трех установленных) гидравлических систем, в которые гидравлическая энергия поступает из гидронасоса с приводом от силовой установки, или от турбины с приводом от набегающего воздуха (RAT - Ram Air Turbine) с присоединенным гидронасосом. Необходимость обеспечения электрической аварийной энергии при помощи генератора аварийного энергоснабжения может быть (в случае надобности) вызвана многосторонним отказом (отказом всех приданных данным силовым установкам генераторов, совместным отказом силовых установок и генераторов, временным отказом всех четырех силовых установок). Данное системное решение предусматривает, что при появлении таких (единичных) отказов в ситуациях аварийности дополнительная важная для обеспечения надежности сборная шина осуществляет через многоканальный переключатель альтернативное питание (по меньшей мере двух) поперечно соединенных (поперечно питаемых) сборных шин трехфазного тока, а затем снабжается аварийной электроэнергией (от генератора аварийного тока).
Гидравлический бортовой энергетический агрегат транспортного средства состоит при рассматриваемом системном решении из трех независимых гидросистем, из которых две питаются своими гидронасосами с приводом от силовых установок. Эти насосы обычно имеют регулирование постоянного давления. Для того, чтобы при множественном отказе силовых установок и (или) гидронасосов с приводом от силовых установок (подобно изображенным комбинациям при предоставлении электроэнергии в аварийных ситуациях) расходовать минимум гидравлической энергии, в турбине с приводом от набегающего воздуха установлен гидронасос, который в аварийном случае (в случае необходимости ввода в действие) подает гидравлическую, энергию в гидравлическую сеть одной (из трех) независимой гидросистемы.
Далее в каждой из независимых гидравлических систем дополнительно установлен регулируемый по давлению гидронасос с приводом от своего электродвигателя (в типичном случае трехфазного асинхронного двигателя), питаемого от одной из сборных шин. Эти дополнительные (с приводом от электродвигателей) гидронасосы служат, как правило, для питания энергией гидравлических систем (паркующего транспортного средства), когда гидронасосы с приводом от силовых установок или силовые установки (по отдельности или все вместе) не находятся в эксплуатации - т.е. предпочтительно во время ухода и обслуживания или во время испытаний. Однако, при соответствующем исполнении они могут служить и для того, чтобы в нормальной эксплуатации (транспортного средства) обеспечить поддержку мощности (при большой потребности в гидравлической мощности) или при отказе соответствующих гидронасосов с приводом от силовых установок той же системы снабжать ее дополнительно подаваемой гидравлической энергией. Эта ситуация может возникнуть, когда две из указанных независимых гидросистем оснащены только одним гидронасосом с приводом от силовой установки. Далее между (каждый раз двумя) гидросистемами можно подключить гидравлическое устройство для переноса мощности (PTU - power transfer unit), которое может альтернативно заменить дополнительные гидронасосы с приводом от электродвигателей. Такое устройство для переноса мощности дает возможность осуществлять двунаправленное поперечное питание от одной независимой гидросистемы с избытком мощности в другую (в остальном независимую) гидросистему с недостающим энергоснабжением, напр., при низком давлении или повышенной потребности в мощности. Далее преобразование трехфазного тока, который вырабатывают генераторы с приводом от силовых установок отдельно от соединенных с ними главных сборных шин, осуществляется преобразовательно-выпрямительным устройством (TRU - transformer/rectifier unit), которое отдельно подключено к соответствующей главной сборной шине. Отдельные преобразовательно-выпрямительные устройства питают подключенную главную сборную шину (DC BUS) постоянным током.
Другие известные системные решения относятся к типичной бортовой энергосистеме для транспортного средства с двумя силовыми установками, причем тоже каждая из этих силовых установок несет генератор трехфазного тока со встроенным редуктором постоянной частоты вращения (integrated drive generator), который в нормальных условиях подает электроэнергию в приданную ему сборную шину трехфазного тока (AC BUS). Два описываемые ниже решения относятся тоже к бортовой энергосистеме с тремя независимыми гидросистемами, но в отличие от ранее рассмотренной конфигурации системы с четырьмя силовыми установками и четырьмя сборными шинами постоянного тока здесь имеются две силовые установки и две сборные шины постоянного тока.
Оба системных решения имеют в своих отдельных узлах (гидронасосы, генераторы силовых установок, гидронасосы, приводимые в действие турбиной с приводом от набегающего воздуха, генератор аварийного токоснабжения и т.п.) идентичные элементы, которые в этих системных решениях по-разному включены в электрическую цепь в отношении питания трех независимых гидросистем или обеих главных сборных шин трехфазного тока и обуславливающей уровень надежности сборной шины трехфазного тока.
В другом системном решении предусматривается, что каждая из двух силовых установок приводит в действие два первичных гидронасоса с регулируемым постоянным давлением и главный генератор. Для наземного режима работы гидросистемы для аварийного гидроснабжения тоже предусмотрено по одному насосу постоянного давления с приводом от электродвигателя и насос с приводом от турбины, имеющей привод от набегающего воздуха. Между двумя главными сборными шинами трехфазного тока тоже можно при отказе главного генератора осуществлять поперечное питание энергией путем замыкания переключателя сборных шин. Другое преобразование (поступающего из главных сборных шин) трехфазного тока осуществляется (аналогично первому рассмотренному системному решению) посредством преобразовательно-выпрямительного устройства, причем два таких устройства питают подключенные к ним сборные шины постоянным током. Альтернативное энергоснабжение обуславливающей уровень надежности сборной шины трехфазного тока через многоканальный переключатель происходит тоже аналогично первому рассмотренному системному решению. При отказе главных генераторов энергоснабжение этой обуславливающей уровень надежности сборной шины трехфазного тока тоже обеспечивается генератором аварийного тока из центральной гидросистемы. При полном (в данном случае двойном) отказе силовых установок или при одновременных отказах гидронасоса с приводом от силовой установки и второй силовой установки гидравлическая аварийная энергия, а тем самым и электрическая аварийная энергия, может быть создана и выдана центральной системе через турбину с приводом от набегающего воздуха с присоединенным гидронасосом.
Последнее известное системное решение для транспортного средства с двумя силовыми установками имеет подобный же вид (вид, близкий к второму системному решению). Основное отличие (от второго системного решения) заключается в том, что каждая силовая установка приводит в действие лишь один гидронасос, каждый из которых обслуживает свою независимую гидросистему. Третью гидросистему снабжает первичной гидроэнергией (в том числе и в нормальных условиях) гидронасос с приводом от электродвигателя. К этой (третьей) гидросистеме подключен также гидронасос, приводимый в действие турбиной с приводом от набегающего воздуха. Третья гидросистема приводит в действие в аварийном случае гидромотор, который механически присоединен к генератору аварийного тока. Тогда последний снабжает аварийной электроэнергией обуславливающую уровень надежности сборную шину трехфазного тока. Специфичным для этой системы является также применение (упоминавшегося ранее) гидравлического устройства для переноса мощности, которое позволяет питать гидравлической мощностью по выбору ту или другую из двух имеющихся независимых гидросистем. Оно заменяет известным образом (как отмечалось при описании первого системного решения) приводимый в действие электродвигателем гидронасос в гидравлической системе.
В целом можно сказать, что все три указанные (и подробно рассмотренные) решения гидравлических и электрических бортовых энергосистем, которые из соображения надежности и безопасности каждый раз выполнены с резервированием (избытком), имеют описываемые ниже идентичные по функциям и целям частичные системы или аппараты в (возможно лишь) различных формах соединения и сочетания по отношению к отдельным гидравлическим системам или (электрическим) сборным шинам. В частности, несколько регулируемых по давлению гидронасосов с приводом от электродвигателей применены для создания необходимой гидравлической энергии для нормального наземного или альтернативного режима работы и в отдельном случае также используются или альтернативно включаются в качестве первичных насосов в нормальном режиме работы. При этом электроэнергия преобразуется в механическую энергию (вала или привода), при помощи которой приводятся в действие монофункционально работающие гидронасосы. Далее эти бортовые энергосистемы обслуживаются монофункционально работающим генератором аварийного тока, чтобы при отказе электрических первичных генераторов (главных генераторов) из предоставляемой в распоряжение гидравлической энергии (по меньшей мере одной) гидравлической системы получать с ее помощью электрическую энергию. Кроме того, каждая из предусмотренных в этом системном решении силовых установок несет по меньшей мере один генератор трехфазного тока и один гидронасос, причем во втором названном системном решении для каждой силовой установки предусмотрены даже два гидронасоса. Тем самым, избыточность имеющихся силовых установок и - также с выгодой в отношении готовности к работе гидравлических и электрических первичных источников энергии (генераторов и насосов) - улучшена благодаря большому количеству (на каждое системное решение).
В то же время рассмотренные системные решения содержат большое число частичных функциональных систем, чтобы в интересах требуемой надежности установленных бортовых энергосистем обеспечить постоянное наличие гидравлической и электрической энергии в данных системах и одновременно высокую надежность энергоснабжения тех и других энергетических систем. Это неблагоприятно отражается на сложности конструкции на весе транспортного средства, а также на эксплуатационных расходах (расход горючего, затраты на уход и ремонтные работы). Кроме того, следует отметить, что ни в одном из упомянутых системных решений не предусматривается использование двунаправленных возможностей поперечного питания гидравлических и электрических энергосистем и не содержатся предпосылки для того, чтобы создать систему такого рода.
Вследствие этого в основу изобретения поставлена задача создать такую систему энергообмена, при помощи которой можно известные системные решения преобразовать с меньшим числом частичных (функциональных) систем, обеспечивая при этом одинаковый или более высокий уровень надежности гидравлической и электрической бортовой энергосистемы транспортного средства (по сравнению с известными системными решениями). При помощи такой системы энергообмена нужно достигнуть такого положения, чтобы путем использования двунаправленной возможности поперечного питания гидравлической и электрической энергией в соответствующей энергосистеме уменьшилась установленная общая мощность. Одновременно при помощи такой системы энергообмена в транспортном средстве должно быть обеспечено управление гидравлической и электрической энергией на базе потребности в энергии, причем применение этой системы помимо снижения затрат на изготовление и эксплуатацию бортовых энергетических систем должно приводить к снижению веса транспортного средства.
Эта задача решается признаками, указанными в пункте 1 формулы изобретения. В дополнительных пунктах указаны целесообразные варианты и исполнения этих признаков.
Подробнее изобретение объяснено на примере исполнения при помощи
прилагаемых чертежей. В частности, показаны:
на фиг. 1 - типичные известные гидравлические и электрические системы производства энергии и энергоснабжения в транспортном самолете с четырьмя
силовыми установками;
на фиг. 2 - типичные известные гидравлические и электрические системы производства энергии и энергоснабжения в транспортном самолете с двумя силовыми установками;
на фиг. 3 - типичные известные гидравлические и электрические системы производства энергии и энергоснабжения в транспортном самолете с двумя силовыми установками;
на фиг. 4
- структурная схема системы энергообмена для двунаправленного преобразования гидравлической энергии в электрическую и наоборот с подключением к снабжающим энергосистемам и соединением с кабиной пилота;
на фиг. 4a - подробное изображение двунаправленной системы гидроэлектрического энергообмена согласно фиг. 4;
на фиг. 5 - двунаправленная система гидроэлектрического энергообмена при
высоком качестве регулирования частоты вращения гидромотора;
на фиг. 6 - упрощенное изображение двунаправленной системы гидроэлектрического энергообмена согласно фиг.4a и 5;
на
фиг.7a - двунаправленная система энергообмена в режиме "Электронасос";
на фиг.7b - двунаправленная система энергообмена в режиме "Альтернативный или аварийный генератор";
на фиг.7c
-двунаправленная система энергообмена в гидросистеме, которую питает на первичном уровне электронасос с турбиной, имеющей привод от набегающего воздуха;
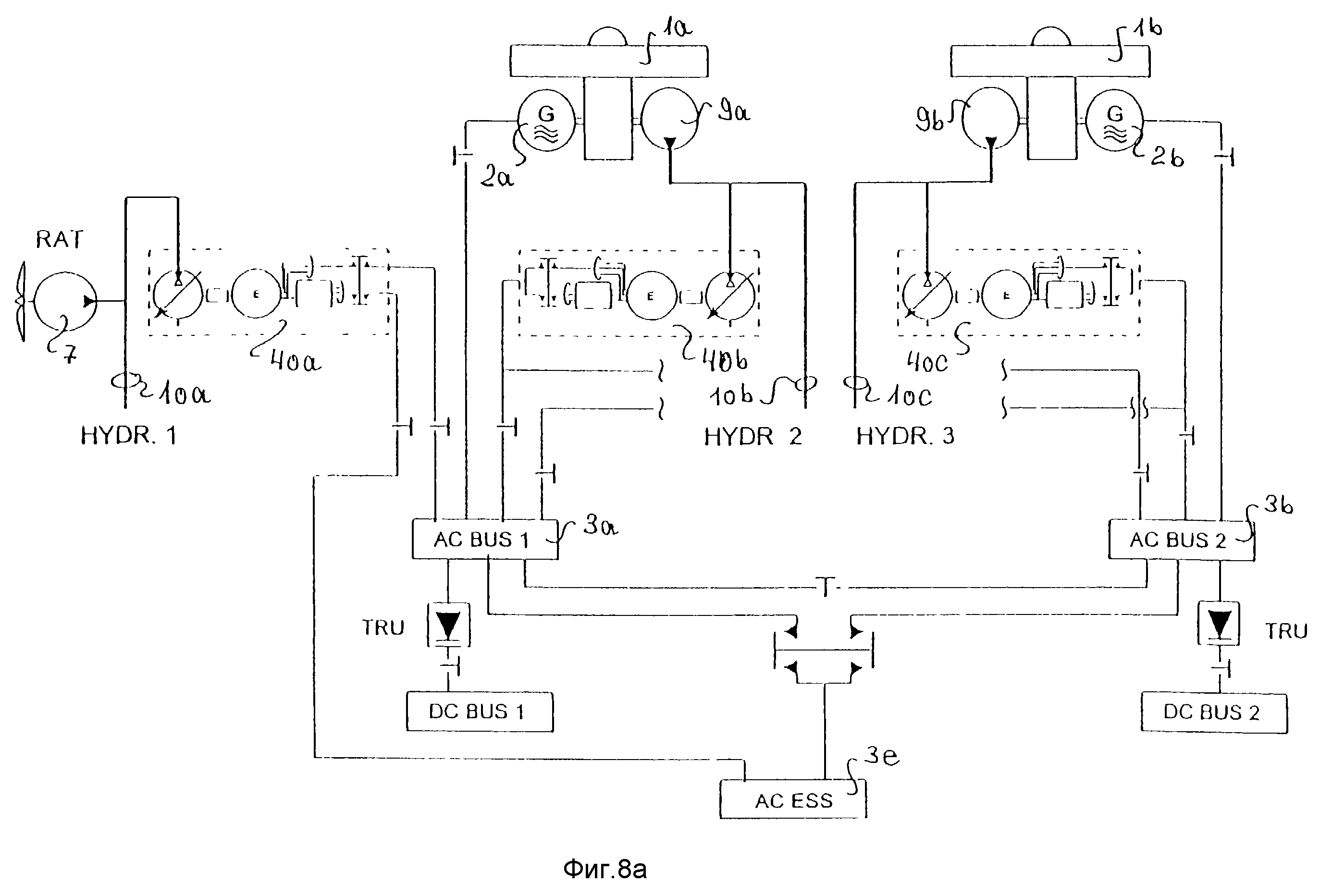
на фиг.8a - гидравлическая и
электрическая системы производства энергии и энергоснабжения согласно фиг. 3 при применении двунаправленной системы энергообмена;
на фиг.8b - гидравлическая и электрическая системы
производства энергии и энергоснабжения согласно фиг. 2 при применении двунаправленной системы энергообмена;
на фиг.8c - гидравлическая и электрическая системы производства энергии и
энергоснабжения согласно фиг. 1 при применении двунаправленной системы энергообмена.
Как известно, на борту самолета необходимо иметь электрические и гидравлические аварийные и альтернативные источники энергии, которые в настоящее время реализуются в виде установленных с резервированием преобразователей энергии (насосов, генераторов). При этом применяются гидронасосы с приводом от электродвигателей или аварийные генераторы с приводом от гидравлики, которые встраиваются в известные (описанные во введении) системные решения согласно фиг.1-3. В связи с этими системными решениями, которые содержат типичные гидравлические и электрические системы производства энергии и энергоснабжения самолета с четырьмя силовыми установками (фиг.1) или двумя силовыми установками (фиг.2 и 3), описаны в дальнейшем усовершенствования этих решений, при помощи которых устраняются присущие им (и критически рассмотренные ранее) недостатки. Ввиду (подробного) вводного описания этих применяемых в настоящее время в самолетах системных решений другие (относящиеся к этим решениям) исполнения не рассматриваются. При помощи прилагаемых условных обозначений (учитывая их применение в составляющих систему средствах и схемных соединениях) опытный специалист без особого труда сможет оценить известные системные решения согласно фиг. 1-3 (в сочетании с вводной частью описания).
В дальнейшем подробнее объясняется структура и функции двунаправленной системы энергообмена согласно фиг.4-8c.
На фиг.4 представлена в виде структурной схемы система энергообмена для двунаправленного преобразования гидравлической и электрической энергии. При этом "система энергообмена" в совокупности своих средств и их образующего систему взаимодействия воплощает (так называемую) двунаправленно работающую "Гидроэлектрическую Систему Энергообмена" (обозначаемую HELW), которая (с точки зрения выполняемой функции) превращает электрическую энергию в гидравлическую или (наоборот) гидравлическую энергию в электрическую. Она состоит из гидравлической подсистемы 12 и электрической подсистемы 13, которые механически соединены посредством редуктора или вала 14, причем дальнейшие разъяснения относятся (в общем) к соединению обеих подсистем при помощи вала.
Гидравлическая подсистема 12 состоит в основном из гидравлического моторно-насосного узла, (характерной) частью которого является гидравлическая (вытеснительная) машина 15, имеющая по меньшей мере один предусмотренный для механического соединения с валом элемент, смонтированный на подшипниках.
Основу электрической подсистемы 13 образует (так называемый) "электрический генератор "дикой" частоты - электрический двигатель", (характерную) часть которого образует электрическая (синхронная) машина 20, имеющая по меньшей мере один предусмотренный для механического соединения с валом элемент, смонтированный на подшипниках. Смонтированные на подшипниках элементы гидравлической и электрической машины 15, 20 гидравлической и электрической подсистем 12, 13 соединены валом 14 или редуктором механически для передачи вращения, чтобы (забегая вперед по отношению к дальнейшим разъяснениям) можно было согласовывать коэффициенты полезного действия обеих подсистем 12, 13 по номинальной мощности. К электрической подсистеме 13 относится также (так называемая) "комбинированная электроника регулирования VSCF и мощности двигателя" (VSCF - Variable Speed Constant Frequency), которая (в общем случае) представляет собой электронный аппарат 22, электрически связанный с электрической машиной 20.
О составе гидравлической и электрической подсистем 12, 13 и принципе действия входящих в них элементов будет более подробно сказано позднее (при объяснении фиг.4a).
К обеим подсистемам 12, 13 электрически как средство информационной техники подключен управляющий блок 26, выполняющий функцию (так называемого) "Приоритетно-предохранительного узла" для наблюдения за системой. Управляющий блок 26 наблюдает за обеими подсистемами 12, 13 и осуществляет управление на основании данных о (фактическом) рабочем состоянии гидравлической или электрической системы 12, 13 (гидравлической или электрической машины 15, 20), полученных из (в общем) гидросистемы 10, объединяющей несколько (гидравлических) линий в одну центральную гидросеть, и из (в общем) электрической системы распределения 3, объединяющей несколько электрических сборных шин в центральную электрическую сеть сборных шин, благодаря чему осуществляется соответствующая подналадка или переключение (не показанных на фиг.4) первого и второго элементов переключения режима, встроенных в обе подсистемы 12, 13, и вводится в действие одна из двунаправленных функций подсистем 12, 13.
В соответствии с этим управляющий блок 26 управляет режимом работы подсистем 12, 13 с преобразованием принятого рода энергии в механическую ротационную энергию, передаваемую в (редуктор или) вал 14, или с принятием ротационной энергии (редуктора или) вала и ее преобразованием в требуемый вид энергии для гидравлической или электрической бортовой сети (в общем случае) транспортного средства. При этом, например, гидравлическая энергия, поступающая из гидравлической машины 15, передается при помощи гидравлической машины 15 в гидросистему 10 (центральную гидросеть), подключенную трубопроводом к гидравлической подсистеме 12.
В другом случае, например (переданная на электрическую машину 20 ротационная энергия преобразуется ею в электроэнергию), причем тогда на выходе электрической машины 20 электроэнергия передается в электронный аппарат 22. При этом электронный аппарат 22 выполняет функцию "комбинированной электроники регулирования VSCF и мощности двигателя", которая воплощает (описываемую более подробно позднее) часть электроники мощности, входящую в подсистему 13. Отдаваемая далее электронным аппаратом 22 (рассматриваемая в направлении потока мощности) электроэнергия поступает затем через соединенную с ним электрическую распределительную систему 3 в систему энергоснабжения данного транспортного средства.
На фиг.4a двунаправленно работающая система энергообмена, преобразующая электрическую энергию в гидравлическую или в обратном направлении потока мощности, представлена более подробно на примере самолета.
Согласно схеме системы энергообмена, показанной на фиг.4a, каждая из двух механически соединенных валом 14 или редуктором машин 15, 20, как уже отмечалось, может при соответствующем включении работать как в качестве двигателя, так и в качестве преобразователя мощности вала (ротационной энергии) в электрическую или гидравлическую мощность. При этом приводимая валом гидравлическая машина 15 в режиме насоса преобразует механическую мощность вала в соответствующую развиваемую насосом гидравлическую мощность. В другом случае гидравлическая машина 15, принимающая гидравлическую мощность из гидросистемы 10, в режиме генератора на выходе ее смонтированного на подшипниках элемента выдает механическую мощность вала, которая (механически) через вал 14 или редуктор передается на смонтированный на подшипниках элемент электрической машины 20. Машина 20, как уже указывалось, преобразует механически принятую мощность вала в режиме генератора в электрическую мощность. В другом случае наоборот принятая электрической машиной электроэнергия преобразуется в механическую энергию вала (ротационную энергию), которую ее смонтированный на подшипниках элемент в режиме двигателя на выходной стороне (механически) передает через вал 14 на смонтированный на подшипниках элемент гидравлической машины 15.
Гидравлическая подсистема 12 согласно фиг. 4a состоит в основном из примененной в качестве гидравлической машины регулируемой гидравлической вытеснительной машины, предпочтительно аксиально-поршневой машины с регулируемым наклонным диском 15a, рабочий объем которого определяется регулировочным устройством 16, например, переставным плунжером или электромеханическим устройством, а также из различным образом (электрически, электронным аппаратом или электромеханически) переключаемых регуляторов 17a, 17b, которые воздействуют на механизм регулирования 16, и первого элемента 18 переключения режима, присоединенного трубопроводом к гидравлической вытеснительной машине 15.
Первый элемент 18 переключения режима выполняет функцию клапанной группы, которая, например, состоит из двух включенных параллельно, соединенных трубопроводами клапанов 18a, 18b. Первый клапан 18a выполнен в виде обратного клапана, а второй клапан 18b служит запорным клапаном, вход которого соединен с первым ответвлением 18c (трубопроводное ответвление), которое является входом в гидравлическую подсистему 12. Выходы обоих клапанов 18a, 18b связаны трубопроводами со вторым ответвлением 18d (трубопроводное ответвление), которое соединено трубопроводами с гидравлической вытеснительной машиной 15.
Первый клапан 18a приводится здесь, например, пружиной в пассивное основное положение (в котором он лишен электрического воздействия); в этом положении гидравлическая мощность не может быть принята из гидросистемы 10, но зато нет препятствия насосному режиму гидравлической машины 15, т.е. гидравлическому переносу мощности в гидросистему 10. Следовательно, эта пружина (приводящая клапан 18a в положение, лишенное электрического воздействия) препятствует принятию гидравлической мощности из гидросистемы 10 (точнее - из гидролинии 98). Наоборот, в этом положении гидравлическая машина 15 (в режиме насоса) может через (обратный) клапан 18a вводить в качестве насоса мощность в гидросистему 10 (точнее - в гидролинию 98).
Включаемый здесь (например, электрическим) сигналом второй клапан 18b вводит в действие режим двигателя гидравлической машины 15, благодаря чему гидравлическая мощность принимается из гидросистемы 10 и преобразуется в механическую мощность для электрической подсистемы 13 или (точнее) для (находящейся в режиме генератора) электрической машины 20.
Ту же функцию, которую выполняет описанная выше (и состоящая из клапанов 18a, 18b) клапанная группа, мог бы осуществлять и один альтернативно установленный клапан (single valve), так называемый обратный клапан свободного переключения. В нем функция первого клапана 18a обеспечивается запертым положением второго клапана 18b.
Эта гидравлическая подсистема 12 работает в качестве (известного в современной технике) регулируемого по давлению насоса, комплекс функциональных элементов которого (на фиг.4a) изображен первым контурным участком 19a, или в качестве (известного в современной технике) регулируемого по частоте вращения или так называемого вторично регулируемого гидромотора, комплекс функциональных элементов которого изображен (на фиг.4a) вторым контурным участком 19b.
В обоих комплексах функциональных элементов оба регулятора 17a, 17b соединены отдельно и при помощи информационной техники с регулировочным устройством 16 (например, с переставным плунжером). Далее первый регулятор 17a соединен с (по меньшей мере одним) датчиком, который встроен в (подключенную к второму ответвлению 18 и к вытеснительной машине 15) трубопроводную линию. Аналогичным образом второй регулятор 17b соединен с (по меньшей мере одним) датчиком, который регистрирует (например) вращательное движение (точнее - число оборотов) вала 14. Оба эти датчика 17a, 17b могут быть электрическими, электромеханическими или гидромеханическими (т.е. использующими для передачи сигнала находящуюся под давлением гидравлическую среду); иными словами, датчики используют для передачи сигнала находящуюся под давлением гидравлическую среду.
Первый датчик 17a работает в режиме "Регулируемый по давлению насос" в качестве регулятора давления, реагирующего на выходное давление p0 насоса. В этом режиме насоса нагнетаемый насосом поток течет в гидравлическую энергосистему через первый клапан 18a (обратный клапан), тогда как второй клапан 18b, как изображено на схеме, запирает поток (внутри клапанной группы).
Второй датчик 17b работает в режиме "Вторично регулируемый гидромотор" в качестве регулятора частоты вращения, который регулирует или управляет частотой вращения nн вытеснительной машины 15 (в этом режиме работы). Режим работы вводится перестановкой второго клапана 18b в положение "Проход", в результате чего поток течет из гидролинии высокого давления 98 в гидромотор 15.
Второй регулятор 17b, воздействующий на регулировочный механизм, может быть гидромеханическим регулятором, который реагирует на частоту вращения nн. Он может быть также выполнен в виде электрогидравлического регулятора с электрическим датчиком, осуществляющим измерение частоты вращения nн. Оба регулятора 17a, 17b, скорреллированные с клапанной группой первого элемента 18 переключения режима через второй (запорный) клапан 18b, соединены с гидравлической вытеснительной машиной 15 с возможностью переключения.
Первый регулятор 17a может - для режима "Регулируемый по давлению насос" - быть гидромеханическим или электронным регулятором с электрогидравлическим исполнительным органом, воздействуя каждый раз на регулировочное устройство 16 для наклонного диска 15a.
В исполнении в качестве электронного регулятора первый регулятор 17a имеет две особые возможности включения в схему:
а) Первая возможность включения этого электронного регулятора
давления состоит в "Пусковом включении насоса", чтобы из состояния покоя двунаправленной системы энергообмена можно было быстро (т.е. без нагрузки) запустить ее на полную мощность. В стадии пуска,
которую задает логический канал режима в управляющем блоке 26, наклонный диск 15b остается в положении нулевого хода, а следовательно, без нагрузки, до тех пор, пока не будет достигнута примерно
синхронная частота вращения электрической машины 20 в электрической подсистеме 13. Только после этого первый регулятор 17a начинает регулировать нужное давление p0.
b) Вторая возможность включения этого электронного регулятора давления относится к установлению заданного давления (т.е. давления, которое должно быть получено путем регулирования). Заданное давление может иметь постоянное значение, соответствующее номинальному давлению p0 (показанных на фиг.8a-8c) главных насосов 9a-9d с приводом от силовых установок. Установление заданного давления, которое соответствует характеристике (так называемой) "плоской отсечки" (flat cut-off) гидронасоса 9a-9d, задается для первого регулятора 17a логическим каналом режима в управляющем блоке 26 тогда, когда двунаправленная система энергообмена должна работать в качестве поддерживающего гидронасоса в условиях пиковой потребности при параллельно работающем первичном насосе (первичных насосах 9a, 9b, 9c, 9d).
Заданное давление p0 может также изменяться в зависимости от объемной подачи насоса в соответствии с характеристикой (так называемой) "мягкой отсечки" (soft cut-off) насосов с регулируемым давлением. Такое давление задается для первого регулятора 17a логическим каналом режима в управляющем блоке 26 предпочтительно тогда, когда однонаправленная система энергообмена подает в гидросистему гидравлическую мощность в качестве единственного источника или заменяющего гидронасоса для отказавших первичных насосов (9a, 9b, 9c, 9d) и необходимую для этого максимальную мощность двигателя надо сильнее ограничить.
Электрическая подсистема 13 согласно фиг.4a состоит в основном из электрической машины 20, второго элемента 21 переключения режима и электронного аппарата 22. Электрическая машина 20 может представлять собой, например, синхронную машину трехфазного тока, которая работает в данной системе в качестве электродвигателя или генератора. Второй элемент 21 переключения режима снабжен устройством для переключения полюсов. При этом контактные выводы электронно или электрически регулируемых частей синхронной машины и устройства переключения полюсов (в общем случае) подключены к регулятору напряжения. Электронный аппарат 22 представляет собой известный силовой электронный аппарат, состоящий из подключенных в последовательную цепь в указанном ниже порядке: выпрямитель, инвертор, выходная ступень фильтра. Контактные выводы трехфазного тока в синхронной машине соединены с контактными выводами трехфазного тока (педальными контактами переключательного органа) в устройстве 21 для переключения полюсов. На входной стороне главные контактные выводы выпрямителя (силового электронного аппарата) подключены к одному из контактов (трехфазного тока) многополюсного переключательного органа устройства 21 для переключения полюсов.
К другим контактам (трехфазного тока) в устройстве 21 для переключения полюсов, имеющего по меньшей мере два положения, подключены контактные выводы (трехфазного) соединения, которые можно отключить посредством первого (трехфазного) выключателя 23a, и электрически соединены с первой электрической (трехфазной) сборной шиной 3a. Таким образом на выходной стороне главные контактные выводы выходной ступени фильтра (силового электронного аппарата) тоже соединены с (трехфазным) соединением, которое можно отключить вторым (трехфазным) выключателем 23b, и электрически соединены со второй электрической (трехфазной) сборной шиной 3b. Оба (трехфазных) выключателя 23a, 23b могут быть также идентичными, если подключение происходит только к сборной шине 3a аналогично шине 3b.
Если электрическая машина 20 должна работать в электрической сети в качестве двигателя, может оказаться целесообразным использовать электронный аппарат 22 (электроника мощности и регулирования), который в этом случае должен состоять из ступени выпрямителя и инвертора, таким образом, чтобы обеспечить контролируемую (регулируемую) стадию пуска электрической машины 20. В этом случае пришлось бы поменять местами последовательность функций выпрямителя и инвертора. Ступень выпрямителя нужно было бы питать от электрической энергосистемы, а инвертор подключить к электрической машине 20.
Следует заметить, что электрическая машина 20 и (или) электрическая бортовая сеть не обязательно должны обслуживаться трехфазным током. В электрической машине 20, работающей в качестве двигателя или генератора, вполне возможно применение любого, например, однофазного, тока. Если электрическая машина 20 и бортовая сеть 3 не согласованы между собой, то в режиме насоса электронный аппарат 22 должен быть включен в противоположном направлении (по отношению к тому, что было описано для контролируемого пуска) в качестве органа электронного регулирования и коммутации для работающей в качестве двигателя электрической машины 20.
Эксплуатация в сети переменного (одно- или многофазного) тока возможна также (при небольшой мощности электрической машины 20) непосредственно, т.е. без применения (работающего двунаправленно) электронного аппарата 22.
При эксплуатации сети постоянного тока инвертор (при помощи переключателя) обходят в режиме генератора. В любом случае инвертор необходим для электронной коммутации в режиме двигателя электрической машины 20 и может стать полностью ненужным при механической коммутации.
При помощи устройства 21 для переключения полюсов, которое:
- подводит в электрическую машину 20 (синхронную машину трехфазного тока) мощность трехфазного тока (из электрической энергосистемы) или
- подводит мощность трехфазного тока, которую выдает
электрическая машина 20 (через электронный аппарат 22) во (вторую) электрическую сборную шину (трехфазного тока) 3b (и тем самым в электрическую энергосистему),
электрическая машина 20
работает в электрической подсистеме 13
а) в качестве двигателя (устройство 21 для переключения полюсов находится в изображенном на фиг.4a верхнем положении), когда через первый выключатель
23a электрическая мощность забирается из первой сборной шины 3а,
или
b) в качестве генератора (трехфазного тока) постоянного эффективного напряжения U и постоянной частоты вращения f,
когда вал 14 или редуктор приводит в действие электрическую машину 20 (электрическую подсистему 13) и через (второй) выключатель 23b питает электрической мощностью (вторую) сборную шину 3b.
Этот описанный в разделе b) режим работы и принятое состояние включения устройства 21 для переключения полюсов (контакты трехфазного тока многополюсного переключательного органа, соединенные на входной стороне с главными контактными выводами выпрямителя и замкнутые посредством включающего органа, закрепленного отдельно от соответствующего педального контакта токопроводящим образом и с возможностью поворота) соответствует известному принципу функционирования электрической системы для создания постоянного напряжения и частоты при переменной или колеблющейся частоте вращения привода nE (VSCF: Variable speed constant frequency).
Для полноты понимания на фиг. 4a показан упомянутый ранее регулятор напряжения U, относящийся к известному принципу работы генератора.
Гидравлическая и электрическая подсистемы 12, 13 механически соединены редуктором или предпочтительно упомянутым ранее валом 14, чтобы - "с точки зрения массы, отнесенной к мощности" - частота вращения nн (гидравлической машины 15) и частота вращения nE (электрической машины 20) были взаимно согласованы в зоне наилучшего частичного КПД обеих машин при номинальной мощности.
Управление режимом работы этой двунаправленной системы энергообмена осуществляется (ранее описанным согласно фиг. 4) и встроенным в управляющий блок 26 (электрическим или электронным) логическим каналом режима. Он регистрирует и обрабатывает поступающие в него сигналы датчиков 24a, 24b, 24c, которые соответствуют измеренным величинам, определяемым внутри гидравлических и электрических энергосистем самолета. В частности, при помощи (не показанных) датчиков регистрируются по меньшей мере давление гидравлической среды в гидролиниях 98 гидросистемы 10 и электрическое напряжение в сборных шинах 3a, 3b электрической распределительной системы 3; эти данные преобразуются в зависящий от давления сигнал датчика 24a и в по меньшей мере один зависящий от напряжения сигнал датчика 24b, 24c. Логический канал режима превращает сигналы датчиков 24a, 24b, 24c в логические сигналы включения 25 для управления включательными элементами режима 18, 21 (различных переключательных устройств) в обеих подсистемах 12, 13, чтобы ввести режим насоса или режим генератора.
Целесообразно предусмотреть, чтобы этот логический канал режима имел (не показанную) схему автоматического включения, которая вводит в действие двунаправленную систему энергообмена при потере давления в гидравлической энергосистеме (самолета) или при спаде напряжения в соответствующих сборных шинах 3а, 3b электрической распределительной системы 3. Кроме того, имеется возможность того, чтобы в общем случае оператор или находящийся в кабине 99 пилот направлял в логический канал режима различную информацию об испытательных переключениях и (или) об отключении автоматической схемы, которую логический канал режима регистрирует и соответствующим образом обрабатывает как входной сигнал (или сигналы) 27. Кроме того, в этом логическом канале режима целесообразно обрабатывать (не показанные на фиг.4a) измерительные сигналы из двунаправленной системы энергообмена, которые служат для наблюдения за правильностью функционирования гидравлической и (или) электрической подсистем. При отклонениях или недопустимых системных значениях этих измерительных параметров схема автоматического включения аннулируется и вся система отключается.
В связи с этим при данной двунаправленной системе энергообмена (согласно фиг.4a), например, можно:
- в режиме генератора превращать гидравлическую энергию в электрическую и питать ею (вторую) сборную шину 3b, первичный электрический источник (источники) (так называемые первичные источники
мощности или первичные генераторы 2) которой отказал или снабжение всех электрических потребителей энергии от соответствующих сборных шин (или шины) 3b больше не осуществляется должным образом. Для
этого данное транспортное средство имеет по меньшей мере одну (здесь не показанную) силовую установку 1 в работоспособном состоянии.
- в режиме насоса получать электроэнергию из исправной электрической сборной шины 3a и (после ее преобразования вследствие соединения валом электрической машины 20 с гидравлической машиной 15) питать в виде гидроэнергии гидросистему 10.
Двунаправленная система энергообмена постоянно соединена с определенной гидравлической бортовой системой; на электрической стороне может иметься в зависимости от надобности или случая применения одна или несколько сборных шин (3a, 3b), которые могут (в зависимости от надобности) отключаться электрическими выключателями 23a, 23b.
На фиг. 5 изображена еще одна форма исполнения двунаправленной системы энергообмена. Здесь в электрической подсистеме 13 (в отличие от фиг.4 и 4a) отсутствует электронный аппарат 22 (отсутствует аппарат силовой электроники), который служит для создания стабильной частоты даже при колеблющейся частоте вращения вала 14. Это упрощенное решение системы энергообмена целесообразно применять тогда, когда можно обеспечить, что регулирование частоты вращения гидравлической машины (гидромотора) 15 будет и при сильно колеблющейся нагрузке достаточно точным для того, чтобы удовлетворить требованиям к стабильности частоты создаваемого выходного напряжения. Все другие ранее упомянутые и в особенности описанные с помощью фиг.4a признаки двунаправленной системы энергообмена остаются в силе и для исполнения согласно фиг.5.
На фиг. 6 в упрощенном схематическом изображении показана определенная (описываемая здесь) двунаправленная система энергообмена 40, которая также была уже описана и подробно изображена на фиг.4a и 5. Эта схема используется для объяснения других форм исполнения систем бортового энергоснабжения.
Электронный аппарат 22 (электронный орган мощности и регулирования) может отсутствовать, если регулирование гидравлической машины 15, (работающей в качестве гидромотора) в режиме генератора удовлетворяет требованию о достаточно точной и стабильной выходной частоте (работающей в качестве генератора) электрической машины 20.
Согласно фиг. 7a и 7b определенная (идентичная) система 40 двунаправленного энергообмена может по выбору
служить:
- заменой монофункциональных, приводимых в действие электрикой (и встроенных в известные согласно фиг.1-3 независимые гидравлические системы 11a, 11b, 11c) гидронасосов, которые
заменяются системой 40 в режиме стоянки или наземного движения при отключенных силовых установках 1a или 1b и (или) в качестве вспомогательного или альтернативного насоса для поддержки или обеспечения
потребности в гидравлической мощности в режиме полета при отказе силовых установок (силовой установки) 1a или 1b или (точнее) при отказе приводимого в действие от силовой установки первичного
гидронасоса 9b в силовой установке 1b, как показано на фиг.7a; и
- заменой монофункциональных, приводимых в действие гидравликой (и встроенных в известные согласно фиг. 1-3 обозначенные CSMG
или работающие в качестве генераторов аварийного тока аппаратов 6) генераторов, которые заменяются системой 40 для питания электрической сборной шины (AC BUS) и обеспечения повышенного потребления
мощности в этих сборных шинах; или для питания известным образом (встроенной в электрическую распределительную сеть 3 и обозначенной AC ESS) сборной шины, которая питает электроэнергией особенно
важного потребителя, потому что всегда имеется риск отказа приводимых в действие силовыми установками генераторов 2a, 2b, 2c, 2d или отдельных (нескольких) сборных шин 3a, 3b, 3c, 3d или одной
(нескольких) силовых установок 1a, 1b, 1c, 1d, особенно в самолете, как показано на фиг.7b.
В соответствии с этим согласно фиг.7a (с учетом наличия в схеме определенной двунаправленной системы 40 энергообмена) имеют место описываемые ниже электрические соединения.
Первый приводимый в действие силовой установкой генератор (трехфазного тока) 2a (в качестве одного из первичных источников энергии) электрически соединен с первой (отключаемой посредством первого выключателя 4a) сборной шиной (трехфазного тока) 3a (AC BUS), подключенной к линии трехфазного тока, которая присоединена к другому (встроенному в определенную систему 40 двунаправленного энергообмена) элементу 21 переключения режима (согласно фиг. 5), в результате чего система 40 может питаться электроэнергией через это (отключаемое первым выключателем 23 трехфазного тока) соединение. Гидравлическая машина 15 системы 40 энергообмена подключена к гидролинии 98, через которую при отказе приводимого в действие силовой установкой гидронасоса 9b ( или силовой установки 1b) передается в гидросистему 10.
Схема согласно фиг.7b имеет кроме того обозначенную через AC ESS сборную шину (трехфазного тока) 3e, причем подключенная к сборной шине (трехфазного тока) 3a (AC BUS) (дополнительная и полностью отключаемая дополнительным выключателем 23c) линия (трехфазного тока) присоединена к сборной шине 3e (трехфазного тока) обозначенной через АС ESS. При этом из приводимого в действие силовой установки первичного гидронасоса 9b через гидролинию (гидролинии) 98 забирается гидравлическая энергия, питающая гидромашину 15. После описанного ранее (при помощи фиг. 4 и 4a) процесса двунаправленного преобразования гидравлической энергии в электрическую (электроэнергия, имеющая на выходе элемента 21 переключения режима (см. фиг. 5) поступает в сборную шину (трехфазного тока) 3a (AC BUS), которая подведена к сборной шине (трехфазного тока) 3e (АС ESS). При этом ввиду предполагаемого отказа первого приводимого в действие силовой установкой генератора 2a трехфазного тока трасса линии прервана.
Применение описанной согласно фиг. 6 определенной системы 40 двунаправленного энергообмена вместо монофункционального приводимого в действие электрикой гидронасоса (известной согласно фиг. 1-3 независимой гидросистемы 11a), а также монофункционального, приводимого в действие гидравликой (известного согласно фиг. 1-3) аппарата 6 (обозначенного через CSMG, и работающего в качестве генератора аварийного тока) в гидравлических системах, которые известным образом питаются первично от приводимого в действие силовой установкой гидронасоса 9a-9d и при помощи которых альтернативный или аварийный источник энергии, например турбина (RAT) с приводом от набегающего воздуха, посредством присоединенного к нему гидронасоса 7 может преобразовывать гидравлическую энергию, которая через (так называемый аварийный генератор) аппарата 6 (CSMG) преобразует также электрическую энергию (см. вторая гидросистема 10b согласно фиг. 1), показывает - по сравнению с представленным на фиг.7c решением - то особое преимущество, которое дает замена монофункционального, приводимого в действие электрикой гидронасоса или монофункционального приводимого в действие гидравликой аппарата 6 (CSMG) определенной системой 40 однонаправленного энергообмена. Это преимущество состоит в том, что - в зависимости от режима введенного в действие путем перестановки (второго) элемента 21 переключения режима система 40 энергообмена работает по выбору в качестве первичного насоса или аварийного генератора.
В схеме согласно фиг. 7c гидравлическая машина 15 определенной системы 40 энергообмена соединена с гидролинией 98, которая подключена к гидронасосу 7, механически присоединенному к турбине (RAT) с приводом от набегающего воздуха. Второй элемент 21 переключения режима в системе 40 соединен отдельно с первой сборной шиной (трехфазного тока) 3a и со сборной шиной 3a (AC ESS) (трехфазного тока), (из которой электроэнергия подается к критически важному потребителю). Многоканальный переключатель 8 (изображенный в виде однополюсного) имеет четыре контактных вывода, два из которых подключены к линейному соединению, которое соединено со сборной шиной (трехфазного тока) 3e (AC ESS). Остальные выводы подключены отдельно к линейным соединениям, которые соединены с первой и второй сборными шинами 3a и 3b трехфазного тока.
Первая электрическая сборная шина (трехфазного тока) 3a присоединена (отключаемым) линейным соединителем к приводимому в действие силовой установкой генератору 2a. В связи с этим имеются описываемые ниже возможности, согласно которым (при включении соответствующего режима) гидронасос 7, приводимый в действие турбиной с приводом от набегающего воздуха, передает в гидромашину 15 гидравлическую мощность, которую, как уже было описано, система 40 двунаправленного энергообмена преобразует в электроэнергию, поступающую в сборную шину 3e, а также - при соответствующем положении многоканального переключателя 8 - в сборную шину 3a или 3b - при возможном отказе генератора 2a. Если в центральной гидросети не хватает гидроэнергии, то (при включении соответствующего режима) электроэнергия, забираемая из приводимого в действие силовой установкой генератора 2a питает через соответствующее соединение сборных шин 3a или 3e, как уже отмечалось, определенную систему 40 двунаправленного энергообмена. Электрическая машина 20 преобразует электрическую энергию в механическую ротационную энергию, которая через вал 14 или редуктор переносится в присоединенную гидравлическую машину 15. В результате гидравлическая машина 15 переносит гидравлическую энергию в центральную гидросеть 10.
Из сказанного видно, что в многократно резервированных гидравлических и электрических общих бортовых энергосистемах транспортных средств (всех видов), в частности в самолетах, в зависимости от конкретного случая применения можно применять также комбинации этих вышеуказанных принципов использования описанной системы двунаправленного энергообмена, чтобы устранить известные недостатки систем согласно фиг. 1-3.
На схемах согласно фиг. 8a, 8b, 8c показаны примеры других вариантов применения систем двунаправленного энергообмена в известных типичных системных решениях согласно фиг. 1-3.
Согласно фиг. 8a - в отличие от решения согласно фиг. 3 - все приводимые в действие электрикой гидронасосы в известных (из фиг. 1-3) независимых гидросистемах 11a, 11b, а также гидравлическое устройство для переноса мощности 121 (PTU), заменены системами 40a, 40b, 40c энергообмена. Все они выполняют также функции электрического, альтернативного или аварийного генератора (трехфазного тока). Дополнительным преимуществом является по сравнению с решением согласно фиг. 3 экономия обычной машины, в данном случае аппарата 6 (CSMG) (со встроенным генератором аварийного тока), при существенно улучшенном питании электрической мощностью (т.е. уменьшении вероятности отказов).
Одновременно можно в режиме движения или
полета и при повышенной пиковой потребности в мощности
- на электрических сборных шинах 3a, 3b: использовать системы 40b, 40c двунаправленного энергообмена в качестве вспомогательных
генераторов, забирая мощность из соответствующих гидросистем 10b, 10c, или
- в гидросистемах 10b, 10c использовать системы 40b, 40c двунаправленного энергообмена в качестве вспомогательных
насосов, забирая мощность из соответствующих электрических сборных шин 3a, 3b.
Эти варианты решений целесообразно применять тогда, когда пиковая потребность в электрической или гидравлической мощности не возникает одновременно из-за соответствующих потребительных систем в нормальном режиме. Появляется возможность получить гидравлическую или электрическую мощность, которую нельзя взять от первичных источников энергии (гидронасосов 9a, 9b или генераторов 2a, 2b). С другой стороны, можно учесть эту электрическую или гидравлическую мощность, создаваемую системами 40b, 40c двунаправленного энергообмена, еще при расчете электрических или гидравлических энергосистем. Тогда преимуществом является соответствующее возможное сокращение применяемых номинальных мощностей первичных генераторов 2a, 2b и первичных насосов 9a, 9b при той же пиковой потребности в мощности, т.е. при той же массе и затратах.
Согласно фиг. 8b приводимого в действие электрикой насосы 11a-11c (согласно фиг. 2) заменены системами 40a-40c двунаправленного энергообмена. Одновременно здесь в каждой силовой установке 1a, 1b установлен только один первичный насос 9a, 9b примерно вдвое большей номинальной мощности, т.е. с двойной объемной подачей по сравнению с известным системным решением согласно фиг. 2. При этом нагрузка силовой установки из-за забора мощности вала для привода насосов и генераторов не изменяется.
Системы энергообмена 40a-40b могут работать в качестве насосов, приводимых в действие электрикой, или в качестве альтернативных генераторов или генераторов аварийного тока.
Преимущества такого системного решения с помощью систем 40a-40c однонаправленного энергообмена согласно фиг. 8b по сравнению с известным решением
согласно фиг. 2 заключаются в следующем:
в распоряжении имеются две гидравлические системы 10a, 10b с вдвое большей гидравлической мощностью, тогда как в известной системе согласно фиг. 2
имеется лишь средняя гидравлическая система 10b с такой мощностью;
(в типичном самолете) экономится расход трубопроводов, а следовательно и вес оборудования гидросистемы 10b согласно фиг. 2
от центральной шахты шасси до обоих насосов 9b, 9c, приводимых в действие силовыми установками;
можно обойтись без аппарата 6 (CSMG) (генератора аварийного тока) согласно фиг. 2;
благодаря системам 40a-40c двунаправленного энергообмена существенно улучшается наличие электрической или гидравлической мощности, т.е. уменьшается вероятность их отказов;
одновременно (и
также как объяснено в связи с системным решением согласно фиг. 8a) можно в определенных стадиях полета покрыть повышенную или пиковую потребность в мощности на электрических сборных шинах или в
гидравлических системах путем соответствующего подключения систем 40a-40c энергообмена или учесть эту возможность еще во время расчета системы, чтобы благодаря уменьшению применяемой номинальной
мощности насосов или генераторов сэкономить вес и затраты.
Согласно фиг. 8c все приводимые в действие электрикой насосы 11a-11c (из фиг. 1) заменены системами 40a-40c двунаправленного энергообмена. Одновременно здесь только в двух силовых установках 1a, 1d установлены генераторы 2a-2d примерно вдвое больше номинальной мощности (по сравнению с типичным известным решением согласно фиг. 1). В двух других силовых установках 1b, 1c установлены по два насоса 9a, 9b и 9c, 9d. При этом нагружение силовых установок мощностью на валу привода насосов и генераторов не изменяется по сравнению с известным системным решением согласно фиг. 1.
Все системы 40a-40c однонаправленного энергообмена могут работать в качестве насосов, приводимых в действие электрикой, или в качестве альтернативных генераторов или генераторов аварийного тока.
Преимущества такого системного решения с системами 40a-40c двунаправленного энергообмена (согласно фиг. 8c) по
сравнению с известным решением согласно фиг. 1 заключаются в следующем:
при одинаковых располагаемых электрических или гидравлических номинальных мощностях на электрических сборных шинах 3a,
3d или в гидросистемах 10a-10c экономится расход трубопроводов для двух насосов между внутренними и внешними силовыми установками, а также (в типичном самолете) кабельные проводки для двух генераторов
из фюзеляжа в расположенные внутри силовые установки 1b, 1c, благодаря чему экономится вес и затраты;
можно обойтись без аппарата 6 (CSMG) (генератора аварийного тока);
обеспеченность электрической или гидравлической мощностью существенно улучшается благодаря системам 40a-40c двунаправленного энергообмена, т.е. снижается вероятность отказа обоих этих видов энергии;
одновременно (и как уже объяснялось в связи с системными решениями согласно фиг. 8a и 8b) можно в определенных стадиях работы покрыть повышенную или пиковую потребность в мощности на сборных
шинах или учесть эту возможность еще во время расчета систем, чтобы благодаря меньшей установленной номинальной мощности главных насосов или генераторов сэкономить соответственно вес и затраты.
В целом можно сказать, что при помощи системы двунаправленного энергообмена создается возможность взаимного аварийного энергоснабжения в гидравлической и электрической сетях, которая в общем может быть применена в транспортных средствах и пригодна не только для применения в самолетах для достижения описанных преимуществ. Описанная система двунаправленного энергообмена может принять на себя функции современных большей частью (применяемых в самолетах) гидронасосов с электроприводом, а также гидро-электрических альтернативных генераторов или генераторов аварийного тока.
В общем виде система состоит из гидромотора, который также может работать в качестве насоса, и присоединенного посредством редуктора или вала электрического генератора - двигателя. Преобразователь
создает в режиме аварийного тока из трехфазного напряжения генератора регулируемой частоты бортовое напряжение постоянной частоты. При появлении потребности в гидравлической мощности этот
преобразователь может в виде питаемого бортовой сетью выпрямителя снабжать регулируемый по частоте вращения электродвигатель для приведения в действие гидронасоса. При этом электронная аппаратура
управления и выпрямления (выполненная в данном случае по двунаправленному типу) базируется на применении высокоинтегрированных силовых полупроводников. Кроме выпрямительной функции, которая по
технологии VSCF (Variable Speed - Constant Frequency)
приводит в генераторах к экономии гидромеханического регулирования частоты вращения, силовая электроника может быть также использована
для регулирования двигателя, чтобы при повышенной или аварийной потребности в гидроэнергии обеспечить регулируемый разгон электрической машины.
Применение двунаправленной системы энергообмена позволяет создать электрические и гидравлические системы бортовой энергетики, которые по сравнению с известными системными решениями обеспечивают при экономии компонентов аналогичную или более высокую надежность. Кроме того, по сравнению с известными системными решениями достигается экономия веса, сложности, объема ухода за оборудованием, а тем самым и снижение затрат на изготовление и эксплуатацию. Такие двунаправленные системы энергообмена можно также применять и для обеспечения пиков потребляемой мощности, тогда как известные способы энергоснабжения либо относятся только к одному виду энергии, либо предусматривают для каждого направления обмена одного вида энергии на другой отдельные компоненты.
При помощи описанной системы двунаправленного энергообмена электрические виды энергии преобразуются в механические, а механические в гидравлические (и наоборот) - на их входах и выходах соответственно конкретной потребности в энергии и мощности. Такое решение, включая представленные исполнения, дает возможность технически интегрировать электрические и гидравлические аварийные и альтернативные источники энергии, которые в настоящее время (в самолетостроении) реалируются в виде отдельных преобразователей энергии (гидронасосов с электроприводом или генераторов аварийного тока с гидроприводом).
Можно полагать, что вообще в современных наземных, водных и воздушных транспортных средствах будет увеличиваться потребность в гидравлической и электрической энергии, что связано с ожидаемым увеличением дальности перевозок и со стремлением снизить вес транспортных средств. В современных пассажирских и транспортных самолетах, в частности на борту крупных самолетов (будущих сверхтяжелых или многопалубных самолетов), можно прогнозировать такую потребность, которая будет сверхпропорционально возрастать с увеличением величины самолета. Поэтому в будущем понадобятся энергосистемы, обеспечивающие преодоление пиков нагрузки на бортовую сеть по времени и по источникам. Этому требованию можно удовлетворить при помощи описанной системы двунаправленного энергообмена, встроенной в современную систему энергоснабжения, поскольку известные системы с учетом необходимого резервирования рассчитаны каждый раз только на электрическую и (или) гидравлическую пиковую мощность.
Список условных обозначений
1, 1a, 1b, 1c, 1d силовая установка
2, 2a, 2b, 2c, 2 d электрический источник; генератор с приводом от силовой установки
3 электрическая распределительная система; несколько
взаимно соединенных электрических сборных шин
3a, 3b, 3c, 3d электрическая сборная шина
3e электрическая сборная шина (снабжает критически важного электрического потребителя)
4 электрический выключатель
4a, 4b, 4c, 4 d электрический переключатель сборных шин
5a, 5b, 5c, 5 d электрический переключатель сборных шин
5e электрический многоканальный
переключатель
6 (так называемый) генератор аварийного тока
7 (аварийный или альтернативный) гидронасос
8 электрический многоканальный переключатель
9 гидравлический
источник
9a, 9b, 9c, 9 d гидронасос
10 гидросистема
10a, 10b, 10c первая гидросистема
11, 11a, 11b, 11c (дополнительный) гидронасос с приводом от
электродвигателя
12 гидравлическая подсистема
121 гидравлическое устройство преобразования мощности
13 электрическая подсистема
14 вал
15 гидравлическая
машина
15a регулируемый наклонный диск
16 регулировочное устройство; переставной плунжер (управляюще-регулировочного устройства 17)
17 управляюще-регулировочное
устройство
17a регулятор; гидромеханический или электронный регулятор с электро-гидравлическим настроечным органом
17b регулятор; гидромеханический или электронный регулятор с
электрическим датчиком
18 гидравлический элемент переключения режима
18a, 18b клапан
18c, 18d ответвление
19a первый контурный участок (узел функциональных
элементов регулируемого по давлению насоса); гидравлическое насосное устройство
19b второй контурный участок (узел функциональных элементов вторично-регулируемого гидромотора); гидравлическое
насосное устройство
20 (ротационная) электрическая машина
21 элемент переключения режима
22 электронный аппарат
23a, 23b, 23c электрический выключатель
24a
сигнал датчика; сигнал о давлении
24b, 24c сигнал датчика; сигнал о спаде напряжения
25 логический сигнал о переключении
26 электрический или электронный управляющий блок
(со встроенным логическим каналом режима)
27 входной сигнал
40 определенная система однонаправленного энергообмена
40a, 40b, 40c система однонаправленного энергообмена
98 гидролиния
99 кабина пилота
const постоянный; неизменный
variable переменный; варьируемый
hydr гидравлический
el электрический
HYDR
гидросистема
CSMG генератор аварийного тока
AC BUS сборная шина трехфазного тока
DC BUS сборная шина постоянного тока
RAT турбина с приводом от набегающего
воздуха
TRU электрическое преобразовательно-выпрямительное устройство
PTU гидравлическое устройство для переноса мощности
3~ = 3⌀ трехфазное переменное напряжение
(трехфазный ток)
P энергия
p0 заданное давление
n частота вращения
nн частота вращения двигателя
nE переменная или
колеблющаяся частота вращения привода
E электрический
U электрическое напряжение
f частота
V вольт (единица измерения)р
Реферат
Изобретение относится к реализации силовых установок на летательных аппаратах и касается двунаправленного преобразования гидравлической энергии в электрическую или наоборот. Система энергообмена обеспечивает энергоснабжение органов летательного аппарата и построена таким образом, что мощность переносится по выбору из гидравлической системы в электрическую и обратно. В гидравлической бортовой системе предусмотрены один или несколько источников, питающих гидросистему с подключенными к ней гидравлическими потребителями. В электрической бортовой системе также имеются один или несколько источников, питающих электрическую распределительную систему с электрическими потребителями. Общая система состоит из гидравлической и электрической подсистем, которые соединены для передачи вращения редуктором или валом. К обеим подсистемам подключен управляющий блок, который управляет машинами на базе зарегистрированного режима, характеризующего гидросистему или электрическую распределительную систему. В результате происходит подналадка или изменение положения элемента переключения режима, встроенного в каждую из подсистем, и ввод в действие одной из двух двунаправленных функций обеих подсистем. Предложенное техническое решение позволяет снизить установленную общую мощность и повысить уровень надежности гидравлической и электрической бортовых систем. 41 з.п.ф-лы, 13 ил.

Формула
а) пусковой схемы с удержанием гидравлической машины (15) в режиме "Насос" в положении около нулевой объемной подачи до достижения приблизительно синхронного числа оборотов электрической машины (20), работающей в этом режиме в качестве электродвигателя;
б) регулятора с постоянным заданным давлением, соответствующим номинальному давлению Ро одного или нескольких гидронасосов, являющихся приводимыми от силовой установки гидравлическими источниками (9), при функционировании в качестве регулирующего устройства для определенной системы двунаправленного энергообмена (40), работающей в роли вспомогательного насоса, покрывающего пиковые потребности;
в) регулятора с зависимым от объемной подачи насоса давлением в соответствии с характеристикой "soft cut off" при функционировании в качестве регулирующего устройства для определенной системы двунаправленного энергообмена (40), работающей в роли единственного питающего гидросистему насоса, или при отказе гидронасосов, примененных в качестве гидравлических источников (9).
Комментарии