Способ контроля состояния зарядки батареи - RU2691963C2
Код документа: RU2691963C2
Чертежи




Описание
Изобретение относится к способу контроля состояния зарядки батареи транспортного средства. Контролируемая батарея является, в частности, свинцовым аккумулятором транспортного средства.
Стартерная батарея транспортного средства является аккумулятором, который обеспечивает электрический ток для стартера двигателя внутреннего сгорания. В противоположность этому, батарея электрического транспортного средства, которая служит для привода транспортного средства, называется тяговой батареей. Дополнительно к этому, электрические транспортные средства или гибридные транспортные средства могут иметь также стартерную батарею. В качестве батарей могут использоваться, например, свинцовые аккумуляторы, которые, однако, в последующем называются также свинцовыми батареями.
Такие батареи транспортного средства постоянно заряжаются и разряжаются. Зарядка осуществляется, например, с помощью осветительного генератора, или в электрических транспортных средствах, заряжаемых от розетки, за счет подключения транспортного средства к локальной сети электроснабжения. При этом могут выполняться различные стратегии управления электроснабжением автомобиля. Стратегии управления генераторами транспортного средства, которые согласуют формирование тока с фазами работы приводной цепи, во время которых электрическая энергия стоит дешево или почти ничего не стоит, необходимо поддерживать состояние зарядки батареи (SOC), которое лежит выше состояния полной зарядки и ниже состояния минимальной зарядки, которое гарантирует выполнение электрических функций. Поэтому система контроля батареи, которая осуществляет оценку состояния зарядки или идентификацию высокого или низкого состояния зарядки, должна обеспечивать, что батарея всегда достаточно заряжена, с целью обеспечения выполнения ее функций.
Стратегии управления системами низкого напряжения (12 В) для заряжаемых от розетки гибридных транспортных средств (PHEV) и электрических транспортных средств (BEV) образуют второй класс стратегий управления электроснабжением. Они могут включать уравнительную зарядку и компенсационную зарядку в зависимости от определенного плана во времени, от режима работы транспортного средства или электрических нагрузок, которые подключены. Такие стратегии также требуют контроля состояния зарядки батареи, поскольку, в частности, компенсационная зарядка представляет условие частичного состояния зарядки, которое может быстро ухудшаться до низкого состояния зарядки.
В известных из уровня техники системах контроля батареи применяются, например, в качестве датчиков тока датчики Холла или шунтирующие измерительные сопротивления, которые устанавливаются непосредственно на полюс батареи. Однако это создает определенные ограничения, соответственно, требования к герметизации и расположению батареи. Измеряемый ток батареи затем обычно интегрируется в реальном времени и добавляется к выходному значению, с целью оценки фактического состояния зарядки. Таким образом, результат является непрерывно вычисляемым значением, которое должно обеспечивать фактическое состояние зарядки.
Шунтирующие измерительные сопротивления могут быть очень точными в широком диапазоне значений тока. Поэтому они пригодны для измерения тока батареи во время работы транспортного средства и во время фаз стоянки, однако они являются относительно дорогостоящими. Датчики Холла не так дороги, однако обычно предназначены для точного измерения тока лишь внутри ограниченного диапазона. Их точность может ограничивать точность оценки состояния зарядки. Это, в частности, справедливо в случае, когда датчик выполнен для измерения высоких или средних токов, однако транспортное средство остается на парковке длительное время с низкими, однако, тем не менее, значительными нагрузками.
Исходное значение, которое применяется в связи с интеграцией тока, можно определять с помощью измерения напряжения холостого хода батареи и с применением заложенной в память корреляцией (справочной таблицей), после нахождения батареи в течение многих часов без тока зарядки или разрядки. Это можно рассматривать в качестве новой калибровки состояния зарядки, которое было определено во время предшествующего движения. Однако периодические или постоянные нагрузки ухудшают эту исходную оценку.
В других концепциях реализации применяется измерение напряжения батареи, в то время как батарея разряжается при известной высокой нагрузке, например, во время прокрутки стартера, с целью оценки исходного состояния нагрузки.
Первый способ, в котором применяется напряжение холостого хода, не применим надежно в заряжаемом от сети транспортном средстве (PHEV или BEV). Это справедливо также для обычных транспортных средств, таких как, например, такси или патрульные автомобили полиции, которые находятся всю ночь в движении с различными водителями. В случае PHEV и BEV, когда зарядка от сети осуществляется в течение нескольких часов, нет гарантии, что имеется достаточно времени для достижения напряжением холостого хода стабильного состояния перед следующей поездкой. Это обуславливается тем, что в электрических архитектурах известных электроснабжений во время зарядки тяговой батареи от сети свинцовая батарея не отсоединяется от источника тока низкого напряжения. Если не прошло достаточное время покоя для измерения напряжения холостого хода в стабильном состоянии, то окончательную оценку состояния зарядки, которое было вычислено во время последней поездки, можно применять в качестве исходного значения. Однако за счет этого ухудшается точность.
В конечном итоге, стоимость датчика контроля батареи (BMS) должна окупаться его функцией. Первостепенной функцией датчика контроля батареи является контроль способности батареи при необходимости обеспечивать ток при минимальных уровнях напряжения. Однако недостатком применения способа интегрирования тока для оценки электрической работоспособности батареи является то, что ее способность отдавать ток не всегда отражает состояние зарядки, даже когда точно известно SOC. Это относится, в частности, к случаю, когда батарея старая.
Указанные выше проблемы точности, вместе с соображениями стоимости и конструктивными ограничениями, которые обусловлены обычными датчиками контроля батареи, приводят к потребности в новых технологиях контроля батареи.
В ЕР 1321773 А1 раскрыт, например, способ определения остаточной емкости батареи, в котором применяется корреляция между остаточной емкостью батареи и четырьмя параметрами. К параметрам относятся внутреннее сопротивление батареи, температура, ток разрядки и напряжение холостого хода. Корреляция между этими параметрами определяется с помощью измерения, и на этом основании выполняются один или более графиков. На основании по меньшей мере двух изменяющихся параметров, которые измеряются во время работы батареи, из графиков определяется соответствующая остаточная емкость батареи. Также в ЕР 1503219 применяется способ, в котором корреляция между остаточной емкостью и измеряемыми параметрами извлекается из справочной таблицы. С высокой точность должна определяться остаточная емкость батареи также с помощью способа, раскрытого, например, в US 7355411 или US 7990111.
Исходя из этого, задача изобретения состоит в создании более простого способа контроля состояния зарядки батареи, с помощью которого можно обеспечивать достаточно высокое состояние зарядки батареи.
Эта задача решена согласно изобретению в соответствии с независимым пунктом 1 формулы изобретения. Предпочтительные модификации этого способа следуют из зависимых пунктов 2-10 формулы изобретения.
Следует отметить, что указанные по отдельности в пунктах формулы изобретения признаки можно комбинировать друг с другом любым технически приемлемым образом и формировать другие варианты выполнения изобретения. Описание дополнительно характеризует и уточняет изобретение, в частности, во взаимосвязи с чертежами.
В способе контроля состояния зарядки батареи транспортного средства согласно изобретению определяется ток батареи в моменты времени, в которые напряжение зарядки батареи снижается до заданного предельного значения. Определяемый таким образом ток батареи передается в блок оценки, который формирует сигнал предупреждения, если с помощью определяемого тока батареи в течение заданного промежутка времени контроля не измеряется разрядка батареи. При этом предельное значение напряжения зарядки батареи выбрано так, что происходит разрядка батареи, когда состояние зарядки батареи лежит выше заданного порогового значения. Применяемый промежуток времени контроля может иметь неизменно заданное значение или непрерывно согласовываться с фактическим состоянием батареи. Контролируемая таким образом батарея является, в частности, свинцовой батареей.
Предельное значение для снижения напряжения зарядки батареи выбрано так, что с помощью соответствующего алгоритма согласно изобретению может быть идентифицировано, лежит ли состояние зарядки батареи выше или ниже порогового значения, выше которого может всегда гарантироваться способность батареи выполнять электрические функции. Однако при этом с помощью алгоритма идентифицируются лишь дискретные состояния зарядки, поскольку с его помощью лишь определяется, является ли состояние зарядки высоким или низким относительно порогового значения. То есть, с его помощью обнаруживаются дискретные состояния, вместо возможно более точной оценки точного состояния зарядки.
Вместо непрерывного вычисления оценки состояния зарядки, алгоритм выдает сигнал, который указывает, лежит ли состояние зарядки ниже или выше заданного порогового значения. Если внутри заданного промежутка времени после снижения напряжения зарядки батареи не измеряется разрядка, то это означает, что состояние зарядки лежит ниже порогового значения и тем самым является не достаточным. Если же в противоположность этому определяется разрядка, то это означает, что состояние зарядки лежит выше порогового значения и является достаточно высоким. Таким образом, с помощью способа согласно изобретению осуществляется определение низкого или высокого состояния зарядки, что является, однако, достаточным для типичных стратегий управления зарядкой, остановкой и запуском, которые имеют целью минимизацию расхода топлива. Это достаточно также для стратегий управления электроснабжением подключаемых к сети транспортных средств, которые предназначены для обеспечения длительного срока службы батареи и максимизации радиуса действия электрического привода.
Поэтому алгоритм не выполняет первоначальную оценку состояния зарядки после длительного времени покоя, что иначе приносило бы с собой указанные выше проблемы. Алгоритм может также осуществляться без смонтированного на полюсах датчика тока батареи и/или датчика напряжения батареи.
Измеряемые значения могут передаваться в оценочный блок с датчика непосредственно или опосредованно. Кроме того, оценочный блок не должен быть самостоятельным модулем, его функции могут осуществляться посредством взаимодействия нескольких отдельных модулей.
Определение высокого или низкого состояния зарядки относительно порогового значения осуществляется согласно изобретению посредством контроля тока батареи, в то время как напряжение на соединительных выводах батареи по меньшей мере на одно мгновение снижается до напряжения, которое соответствует калиброванному пороговому значению. При этом ток батареи может определяться непосредственно или опосредованно посредством измерения выходного тока источника тока, которым заряжается батарея. Этот источник тока является, в частности, генератором (например, осветительным генератором) или преобразователем постоянного напряжения (DCDC) транспортного средства. Если выходной ток осветительного генератора или преобразователя DCDC падает до нуля во время падения напряжения, то можно исходить из того, что весь ток низкого напряжения поставляется батареей. Таким образом, можно определять время разрядки батареи посредством контроля выходного тока осветительного генератора или преобразователя DCDC, и нет необходимости в отдельном датчике тока батареи.
Если алгоритм контроля состояния зарядки осуществляется в соединении со стратегиями управления электроснабжением, которые периодически повышают и понижают номинальное значение напряжения, то контроль может происходить, когда номинальное значение понижается этим образом. Это может быть, например, в случае, когда напряжение зарядки батареи повышается на основании стратегии зарядки, если имеются заданные условия, и напряжение зарядки батареи снова снижается до заданного предельного значения, если эти заданные условия больше не имеются. Эти заданные условия могут содержать, например, высокий коэффициент полезного действия преобразования энергии приводной ветви транспортного средства или хорошие условия для регенеративного торможения.
Однако, если такие изменения номинального значения напряжения происходят слишком редко или совсем не происходят, алгоритм может также вызывать периодически требуемые понижения напряжения. Поэтому в одном предпочтительном варианте выполнения изобретения предусмотрено, что напряжение зарядки батареи планомерно снижается с регулярными интервалами до заданного предельного значения. Таким образом, могут быть запланированы периодические снижения напряжения короткой длительности, которые служат лишь для целей регулярного контроля состояния зарядки.
Если с помощью сигнала предупреждения от оценочного блока распознается слишком низкое состояние зарядки батареи, то в транспортном средстве могут быть инициированы меры для изменения состояния батареи. Эти меры содержат, в частности, инициирование процесса зарядки батареи на максимальное состояние зарядки, которое должно лежать возможно ближе к 100%. Если алгоритм комбинируется с предпочтительной стратегией зарядки, то это может означать сохранение высокого номинального значения напряжения батареи, которое иначе предназначено для рабочих фаз транспортного средства с высоким коэффициентом полезного действия или регенеративного торможения. Если, в противоположность этому, алгоритм интегрирован в стратегию зарядки, при которой планомерно с регулярными интервалами осуществляется смена между компенсационной зарядкой и уравнительной зарядкой, то для этого согласно одному примеру выполнения изобретения инициируется внеплановая смена от компенсационной зарядки к уравнительной зарядке. Это происходит предпочтительно так долго, пока батарея не будет достаточно подзаряжена.
При уравнительной зарядке применяется номинальное значение напряжения, которое облегчает полную зарядку всех ячеек в свинцовом аккумуляторе. Оно обычно зависит от температуры и часто задано так, что скорость образования газов при максимальном конструктивном значении лежит в середине заданного температурного диапазона. Это зависящее от температуры напряжение зарядки заносится в таблицу с помощью, так называемой кривой z. Кривая z, которая задает уравнительную зарядку, может быть получена от изготовителя батареи или задана изготовителем транспортного средства, с целью хорошей работы в заданном целевом транспортном средстве с прогнозируемым профилем использования. Кривая z задает напряжение на соединительных клеммах батареи.
В противоположность этому, компенсационная зарядка является стратегией управления номинальным значением напряжения электроснабжения транспортного средства, которое минимизирует ток батареи и поддерживает состояние зарядки батареи при или около неизменного значения. Компенсационная зарядка может выполняться одним из двух видов: в виде зависящего от температуры напряжения, которое задается на соединительных клеммах батареи, или в виде стратегии управления током, которая управляет номинальным значением электроснабжения (преобразователя DCDC или генератора) так, что ток батареи остается равным нулю.
Поскольку способ согласно изобретению не требует промежутков времени, в которых не подается напряжение для новой калибровки батареи, для коррекции ошибок интегрирования тока, то его можно применять в подключаемых к сети гибридных и электрических транспортных средствах, которые можно подключать к сети и заряжать или использовать для поездки большую часть дня.
Кроме того, область применения изобретения может быть расширена для применения способа, например, в самолетах, на судах и в стационарном электроснабжении (например, в бытовом электроснабжении), в которых применяются свинцовые батареи для накопления энергии. Самолеты и суда часто находятся в работе между пунктами назначения или стоят на летном поле или в доках, где батареи заряжаются от внешнего источника тока. Их рабочие циклы аналогичны циклам подключаемых к сети транспортных средств тем, что в их батареи подается непрерывно напряжение зарядки. Стационарное бытовое электроснабжение, которое питается с помощью солнечной или ветровой энергии и в котором применяются свинцовые батареи для накопления энергии, могут иметь аналогичные рабочие циклы.
Другие преимущества, особенности и целесообразные модификации изобретения следуют из зависимых пунктов формулы изобретения и приведенного ниже описания предпочтительных вариантов выполнения со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1 - эквивалентная схема для зарядки свинцовой батареи под нагрузкой;
фиг.2 - поляризация элементов ZARC при разрядке с помощью нагрузки;
фиг.3 - поляризация элементов ZARC при зарядке батареи с помощью внешнего источника тока;
фиг.4 - полное сопротивление батареи по существу в стабильном состоянии во время разрядки;
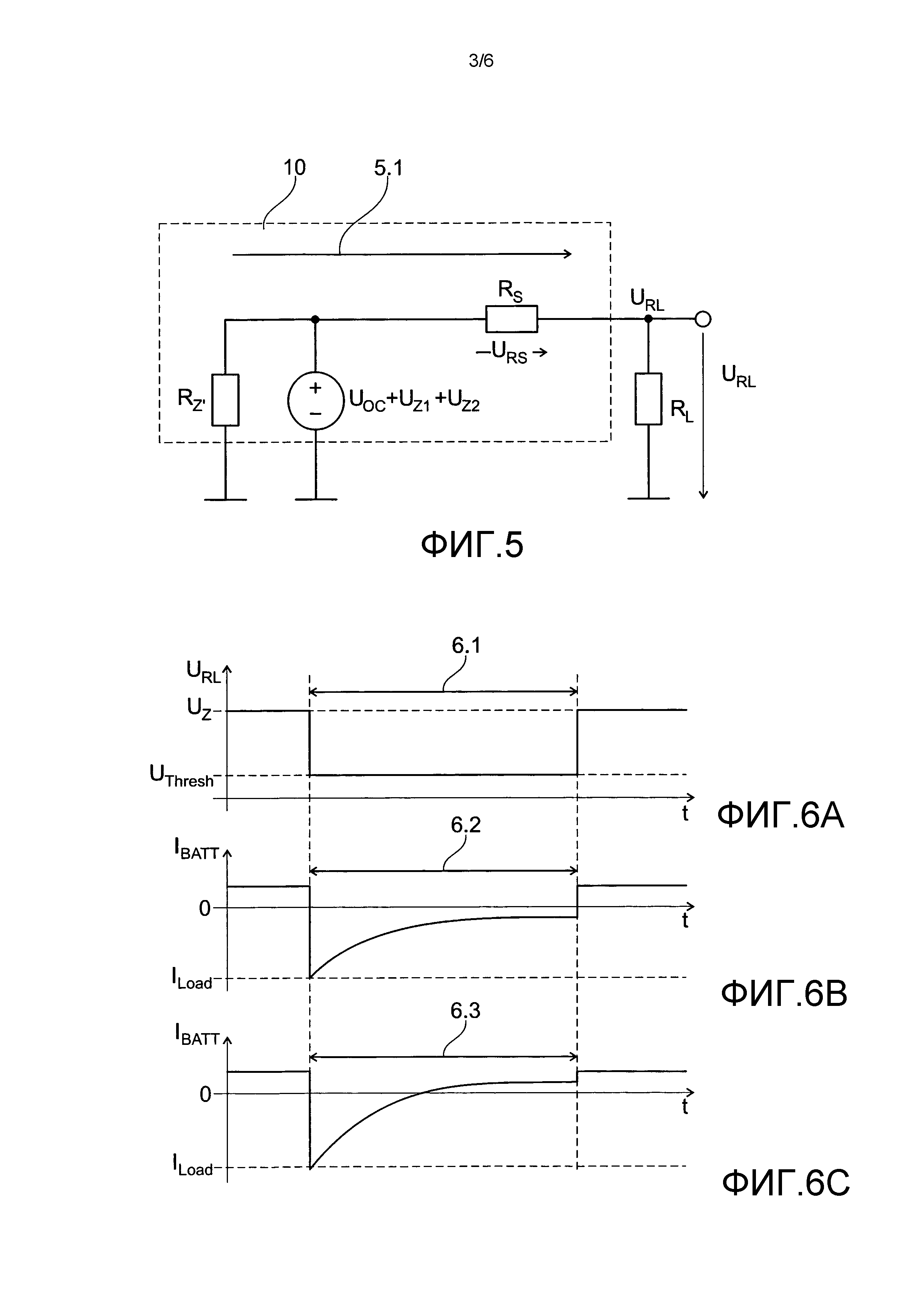
фиг.5 - эквивалентная схема с источником напряжения полной модели батареи;
фиг.6а - график напряжения на соединительных клеммах в зависимости от времени во время управления номинальным значением напряжения;
фиг.6b - график тока батареи в зависимости от времени при высоком состоянии зарядки батареи;
фиг.6с - график тока батареи в зависимости от времени при низком состоянии зарядки батареи;
фиг.7 - блок-схема алгоритма с периодически создаваемыми снижениями напряжения;
фиг.8 - схема оперативной реализации алгоритма для оценки времени разрядки виртуальных емкостей на основании измеряемого тока нагрузки транспортного средства в каждый произвольный момент времени;
фиг.9 - эквивалентная схема для вычисления времени разрядки; и
фиг.10 - блок-схема алгоритма для идентификации состояния зарядки.
Лежащий в основе способа согласно изобретению принцип сравнения состояния зарядки батареи с калиброванным пороговым значением иллюстрирован на фиг.1 на основании эквивалентной схемы для свинцовой батареи. В эквивалентной схеме показана батарея 10, которая разряжается через нагрузку RL. Модель батареи состоит из источника напряжения, напряжение UOC которого соответствует напряжению холостого хода, когда батарея длительное время находилась в состоянии покоя и находится в состоянии равновесия, двух элементов ZARC и последовательного сопротивления RS, которое не является постоянным, а зависит от состояния зарядки и температуры. Элементы ZARC состоят каждый из нелинейного сопротивления RZn, параллельно которому включен элемент постоянной фазы, который приближен с помощью конденсатора CZn. Можно применять также модель с более чем двумя элементами ZARC, с целью лучшей аппроксимации фактической характеристики батареи, однако соответствующий изобретению принцип идентификации порогового значения SOC может быть пояснен с помощью одного или двух элементов.
Элементы ZARC представляют эффекты поляризации в батарее, которые оказывают влияние на ее спектр полного сопротивления. Перед отделением нагрузки от батареи, напряжение на соединительных клеммах равно сумме напряжения UOC холостого хода, напряжений на элементах ZARC и напряжения на последовательном сопротивлении RS. Когда нагрузка отделяется от батареи, то батарея постепенно приходит в равновесное состояние, что имитируется в модели тем, что виртуальные емкости CZ1 и CZ2 разряжаются через нелинейные сопротивления RZ1 и RZ2, пока напряжение холостого хода на соединительных клеммах не будет равно UOC. Поляризация виртуальных конденсаторов CZ1 и CZ2, зависит от знака направления тока. Если происходит разрядка, как показано на фиг.2, то конденсаторы имеют поляризацию, одинаковую с поляризацией источника напряжения холостого хода. Это означает, что положительная сторона источника напряжения соединена с положительной стороной цепочки элементов ZARC. Вследствие этого напряжение на соединительных клеммах батареи меньше напряжения холостого хода. Направление прохождения тока обозначено на фиг.2 стрелкой 2.1.
Когда батарея заряжается с помощью внешнего источника тока, то поляризация элементов ZARC является противоположной. Отрицательная сторона цепочки элементов ZARC соединена с положительной стороной источника напряжения UOC, и вследствие этого напряжение на соединительных клеммах выше напряжения холостого хода. Напряжение UOC холостого хода является функцией состояния зарядки и температуры. Функция UOCV(SOC,T) является относительно состояния зарядки почти линейной и может быть определена с помощью испытаний на испытательном стенде для калибровки алгоритма.
Если батарея 10 заряжается от внешнего источника 20 тока, такого как, например, осветительный генератор или преобразователь DCDC, то напряжение на соединительных клеммах батареи значительно больше напряжения UOC холостого хода, и элементы ZARC имеют поляризацию, показанную на фиг.3. Номинальным значением напряжения осветительного генератора или преобразователя DCDC всегда управляют так, что к соединительным клеммам батареи прикладывается заданное напряжение. Показанная на фиг.3 упрощенная модель не содержит сопротивление проводов между батареей 10 и источником 20 напряжения, так что напряжение на соединительных клеммах батареи равно напряжению URL на электрических нагрузках. При анализе это номинальное напряжение электроснабжения предпочтительно определяется относительно напряжения на соединительных клеммах батареи.
Для определения, находится ли состояние зарядки батареи выше или ниже предельного значения для состояния зарядки батареи (SOC - State of Charge), номинальное значение напряжения источника тока понижается до напряжения UOCV(SOC,T), которое соответствует этому значению SOC и температуре. Таким образом,
USetpoint = URL = UOCV(SOC,T). (1)
В момент времени после уменьшения номинального значения напряжения, сумма фактического внутреннего напряжения UOC холостого хода и напряжений на элементах ZARC больше номинального значения:
UOC + UZ1 + UZ2 > URL. (2)
В момент времени непосредственно после уменьшения номинального значения должна происходить разрядка батареи на основании выраженной уравнением (2) неравности. Накопленная в батарее энергия, которая разряжается, может быть разделена на две категории: химическую потенциальную энергию (количество которой выражено с помощью UOC), которая преобразуется в электрический ток, в то время как вследствие окислительно-восстановительных реакций образуется сульфат свинца и вода, и энергию, которая накапливается в виртуальных емкостях ZARC и характеризуется напряжениями UZ1 и UZ2, которые представляют эффекты поляризации.
Внутреннее сопротивление источника химической потенциальной энергии, опирающейся на окислительно-восстановительные реакции, на соединительных клеммах батареи равно полному сопротивлению батареи в по существу стабильном состоянии во время разрядки. Как показано на фиг.4, оно равно сумме последовательного сопротивления RS и (нелинейных) ZARC-компонентов RZ1 и RZ2. При этом направление прохождения тока обозначено на фиг.4 стрелкой 4.1.
Внутреннее сопротивление между буфером энергии, который характеризуется содержащимися в элементах ZARC виртуальными емкостями, и соединительными клеммами батареи содержит лишь последовательное сопротивление RS батареи. Это иллюстрировано в эквивалентной модели с источником напряжения полной модели батареи на фиг.5, при этом здесь направление прохождения тока обозначено стрелкой 5.1.
Поскольку внутреннее сопротивление представленного виртуальными конденсаторами в элементах ZARC буфера энергии меньше сопротивления химической потенциальной энергии, которая характеризуется напряжением UOC, то падение напряжения на соединительных клеммах батареи до номинального значения, которое меньше UOC, приводит к тому, что виртуальные конденсаторы полностью разряжаются через нагрузку RS, прежде чем формируется ток за счет окислительно-восстановительной реакции. Тем самым поляризация конденсаторов, как показано на фиг.3, должна измениться на противоположную, если UOC больше номинального значения напряжения. Когда это так, то конденсаторы должны принимать противоположную поляризацию, как показано на фиг.2, прежде чем измеряется протекающий в батареи (зарядный) ток.
Таким образом, если ток зарядки батареи измеряется перед полной разрядкой конденсаторов, то можно исходить из того, что процесс разрядки преждевременно останавливается, поскольку номинальное значение напряжения больше UOC, что означает, что состояние зарядки батареи лежит ниже порогового значения, которое задает номинальное значение.
Этот способ сравнения состояния зарядки основывается на концепции определения, полностью ли разряжены в модели емкости, которые представляют эффект поляризации, и снова заряжаются с противоположной поляризацией, когда номинальное значение напряжения снижается до значения, которое соответствует пороговому значению в состоянии зарядки. Этого можно достигать с помощью алгоритмов с изменяющимися степенями точности. В простейшем случае алгоритм проверяет, может ли батарея поддерживать нагрузку без помощи остального электроснабжения (осветительного генератора или преобразователя DCDC), когда номинальное значение напряжения электроснабжения уменьшается на калиброванное значение.
Для определения, полностью ли разрядились и поменяли поляризацию виртуальные емкости в элементах ZARC, которые представляют эффекты поляризации, когда уменьшается номинальное значение напряжения, можно контролировать ток батареи во времени, которое необходимо для полной разрядки конденсаторов. Если во время этого промежутка времени измеряется лишь ток разрядки батареи, то можно исходить из того, что конденсаторы также полностью разряжены, и что их полярность относительно предыдущих состояний во время зарядки поменялась на противоположную. Таким образом, применяется оцениваемое время разрядки, с целью определения длительности понижения напряжения и промежутка времени контроля.
В то время как ток батареи можно с помощью ряда обычных средств контролировать с хорошей точностью, точность определения времени разрядки может быть меньшей. Это обусловлено неточностью оценки значений виртуальных емкостей в элементах ZARC, которые являются функцией напряжения на элементе ZARC (накопленной в элементе ZARC энергии и тока батареи), состояния зарядки батареи и температуры.
Предпочтительно выбирается промежуток времени контроля тока, который немного больше максимально возможного времени разрядки, для компенсации неточностей при вычислении точного времени разрядки и исключения пропуска идентификации условия низкого состояния зарядки. После полной разрядки виртуальных емкостей, контур тока переходит в переходную фазу, которая в конечном итоге заканчивается тем, что исчезает ток разрядки. Пока измеряется ток разрядки в течение всего времени, которое необходимо для разрядки емкостей, и измеряется некоторая разрядка в переходной фазе, после изменения емкостями поляризации, можно исходить из того, что состояние зарядки батареи превышает пороговое значение.
Следующие условия можно применять с помощью алгоритма, с целью идентификации соотношения между состоянием зарядки батареи и пороговым значением:
- полная разрядка емкостных частей элементов ZARC является необходимой предпосылкой того, что состояние зарядки батареи может превышать пороговое значение;
- измерение тока разрядки батареи в переходной фазе после разрядки емкостных элементов, является достаточной предпосылкой того, что состояние зарядки батареи может превышать пороговое значение; состояние зарядки батареи может превышать пороговое значение.
В простейшей концепции реализации может быть предусмотрен выбор постоянного промежутка времени контроля, который больше максимально возможного времени разрядки для определенной батареи. Номинальное значение напряжения периодически уменьшается по меньшей мере на промежуток времени контроля, и контролируется ток батареи. Если измеряется ток разрядки батареи, то существует достаточное условие для идентификации состояния зарядки, которое выше порогового значения. Если в течение этого времени начинается зарядка батареи, то ее состояние зарядки возможно меньше калиброванного порогового значения. Таким образом, идентификация низкого состояния зарядки является консервативным: ошибочные положительные идентификации возможны, в то время как ошибочные отрицательные идентификации, которые не обнаруживают условие низкого состояния зарядки, выполнены так, что они редко происходят.
Кривые состояния для напряжения и тока во время промежутка времени контроля для батарей с состоянием зарядки выше и ниже калиброванного порогового значения показаны на фиг.6а, 6b и 6с. На фиг.6а показано напряжение URL на соединительных клеммах в зависимости от времени t с управлением номинальным значением напряжения. На фиг.6b показан ток IBatt батареи в зависимости от времени t при высоком состоянии зарядки SOC батареи (SOC > SOCThresh), в то время как на фиг. 6с показан ток IBatt батареи в зависимости от времени t при низком состоянии зарядки SOC батареи (SOC < SOCThresh). Диапазон 6.1 на фиг.6а характеризует промежуток времени контроля, в то время как диапазон 6.2 на фиг.6b обозначает полную разрядку, а диапазон 6.3 на фиг.6с обозначает неполную разрядку.
На фиг.6а номинальное значение напряжения UZ соответствует зависящему от температуры напряжению уравнительной зарядки, а UThresh соответствует калиброванному пороговому значению SOCThresh, как определено в уравнении (1). Ток зарядки батареи определяется как положительный, а ток разрядки определяется как отрицательный. На фиг.6b показан ход изменения тока батареи при состоянии зарядки, которое лежит ниже порогового значения, поскольку в течение промежутка времени контроля измеряется (положительный) ток зарядки. В противоположность этому, на фиг.6с показан ход изменения тока батареи с состоянием зарядки, которое лежит ниже порогового значения, поскольку в течение промежутка времени контроля измеряется (положительный) ток зарядки.
Для выполнения соответствующего изобретению способа сравнения состояния зарядки необходимо уменьшать напряжение на батарее с напряжения, которое гарантирует ток зарядки (который течет в батарею), на номинальное значение напряжения, которое является функцией порогового значения состояния зарядки, которое применяется для сравнения. Для этого имеется по меньшей мере две возможности. Одна возможность состоит в периодическом снижении номинального значения напряжения с помощью таймера, а другая возможность состоит в координации промежутков времени контроля с понижениями номинального значения напряжения, которые происходят во время регенеративного торможения или других взаимодействий между управлением транспортного средства и номинальным значением напряжения.
Отрицательный градиент уменьшения напряжения от напряжения зарядки до напряжения, которое соответствует пороговому значению состояния зарядки, должен выбираться достаточно большим, чтобы он не ограничивал ток зарядки во время разрядки, однако также не вызывал заметного мерцания ламп или слышимые изменения скорости вращения вентилятора в транспортном средстве. Положительный градиент, который соответствует возврату напряжения уравнительной зарядки, ограничивается лишь соображениями качества напряжения: мерцанием ламп и слышимыми изменениями скорости вращения вентилятора.
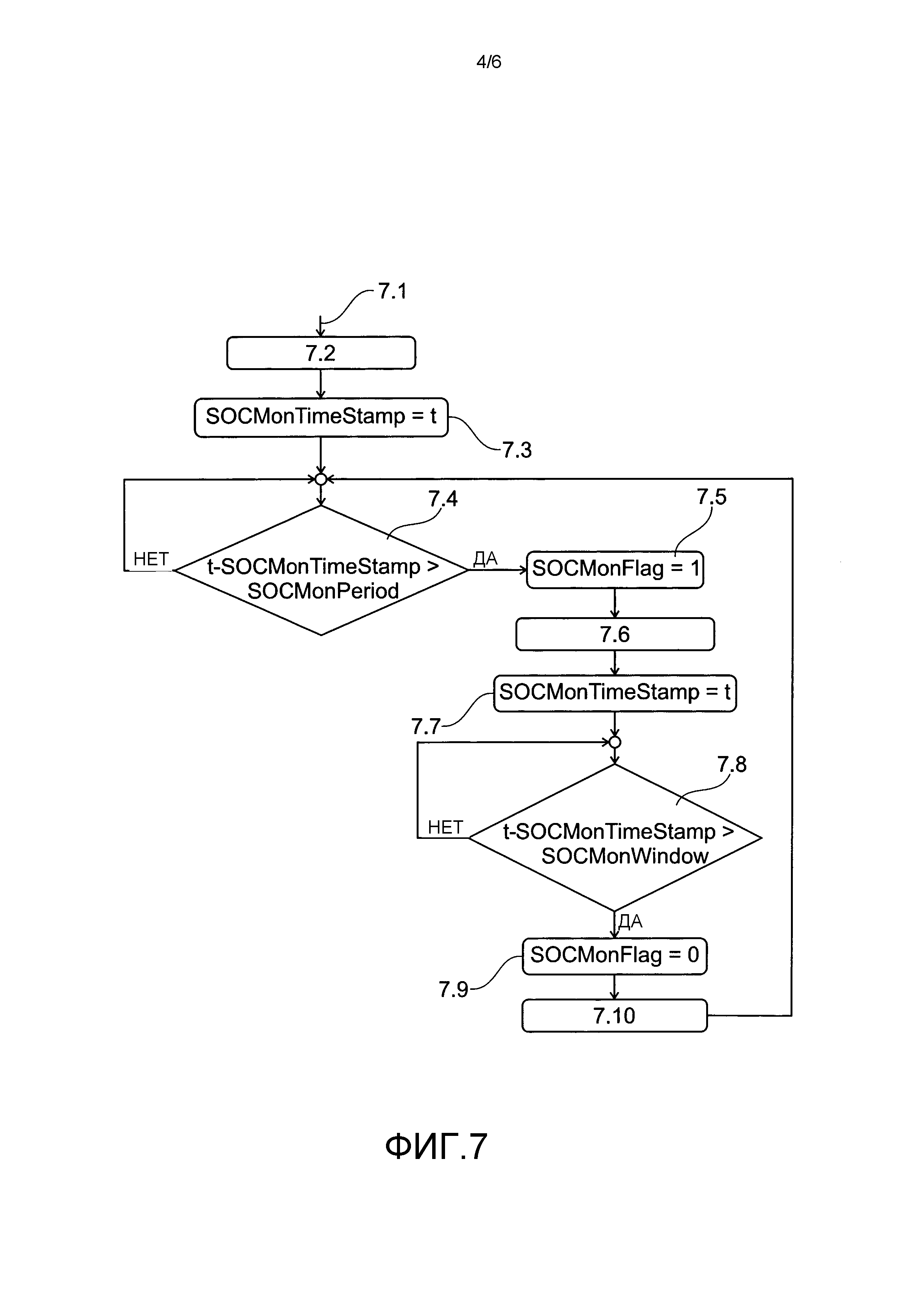
Периодическое уменьшение номинального значения напряжения с помощью основанного на таймере алгоритма показано на фиг.7. После включения электроснабжения транспортного средства на этапе 7.1 применяется зависимое от температуры напряжение уравнительной зарядки. Это напряжение обозначено на фиг.7 как UEQ, так что номинальное значение напряжения устанавливается на этапе 7.2 на UEQ. Также регистрируется фактическое время и на этапе 7.3 запоминается в изменяемой отметке времени SOCMonTimeStamp. Когда прошедшее время после запоминания отметки времени превышает калиброванную изменяемую переменную SOCMonPeriod (на этапе 7.4), то начинается промежуток времени контроля батареи, который сопровождается уменьшением напряжения. Указательный флаг (переменная) SOCMonFlag, который указывает, что начался промежуток времени контроля батареи, устанавливается на этапе 7.6 на высокое значение (=1), и на этапе 7.6 номинальное значение напряжения устанавливается на значение UThresh. Это значение UThresh соответствует пороговому значению состояния зарядки, которое указано в уравнении (1). Кроме того, значение переменной SOCMonTimeStamp на этапе 7.7 возвращается на фактическое время t. Это время используется в качестве опорной величины, с целью определения, когда заканчивается промежуток времени контроля и начинается следующий.
Если проверка на этапе 7.8 показывает, что время с начала промежутка времени контроля превышает калиброванное пороговое значение SOCMonWindow, то значение SOCMonFlag на этапе 7.9 возвращается на ноль, и номинальное значение напряжения на этапе 7.10 снова устанавливается на напряжение уравнительной зарядки. Промежуток времени контроля может быть довольно коротким, при этом значение SOCMonWindow в типичных применениях в автомобиле может быть меньше 20 секунд. Новый промежуток времени контроля начинается, когда разница между фактическим временем t и значением, которое занесено в память как SOCMonTimeStamp, снова превышает калиброванное значение SOCMonPeriod. Это значение может быть калибровано для запуска промежутка времени контроля, в зависимости от применения, каждые несколько часов или несколько раз в час. При этом применяется изменяемый указательный флаг SOCMonFlag, с целью инициирования алгоритма контроля тока батареи. Когда он установлен на высокое значение (=1), то должно начинаться контроль и сохраняться в течение оценочного или калиброванного времени разрядки.
Кроме того, промежутки времени контроля можно координировать с изменениями номинального значения напряжения, которые происходят во время регенеративного торможения или других взаимодействий между элементами управления транспортным средством и номинальным значением напряжения. Если они происходят достаточно часто, то можно отказаться от периодических уменьшений напряжения. При этом уменьшения напряжения, которые вызываются стратегией управления электроснабжением, которая реализует регенеративное торможение и селективную зарядку с помощью указанного алгоритма контроля состояния зарядки, координируются с алгоритмом согласно изобретению.
Для контроля тока батареи после уменьшения напряжения, можно выполнять непосредственное измерение или опосредованный контроль. Непосредственное измерение можно выполнять с помощью стандартного датчика Холла или шунтирующего измерительного сопротивления. Однако стоимость датчика можно сэкономить тем, что ток батареи контролируется опосредованно с помощью выходного тока осветительного генератора или преобразователя DCDC, которые служат в качестве основного источника тока.
Алгоритм идентификации SOC требует, чтобы знак тока батареи указывал состояние зарядки или разрядки. При предположении, что электрический ток для снабжения электрических нагрузок должен приходить от основного источника электрического тока (осветительного генератора или преобразователя DCDC) или батареи, можно определять, разряжается ли батарея, посредством контроля выходного тока основного источника тока. Пока выходной сигнал является нулем, батарея должна разряжаться и снабжать электрические нагрузки.
В обычном транспортном средстве с осветительным генератором предполагается, например, разрядка батареи, когда не измеряется выходной ток осветительного генератора. На практике стратегии управления двигателем требуют измерения тока осветительного генератора, с целью компенсации механической нагрузки осветительного генератора. Оценка выходного тока осуществляется с помощью осветительного генератора относительно его рабочего цикла или абсолютного тока, и оба вида информации можно применять для того, чтобы определять, разряжается ли батарея. В случае электроснабжения, в котором имеется преобразователь DCDC в качестве основного источника, часто также имеется в распоряжении выходной сигнал, который сообщает выходной ток. Таким образом, может быть реализован алгоритм идентификации SOC согласно изобретению без отдельного датчика тока батареи, посредством контроля тока осветительного генератора или преобразователя DCDC.
Как указывалось выше, контролируется ток батареи после возникновения уменьшения напряжения, с целью идентификации, лежит ли состояние зарядки батареи выше или ниже порогового значения. Если батарея разряжается в течение времени, которое необходимо для разрядки виртуальных конденсаторов в элементах ZARC, то определяется состояние зарядки выше калиброванного порогового значения. Время, в течение которого контролируется ток батареи, должно быть несколько больше, чем оцениваемое время разрядки конденсаторов, с целью создания достаточных условий, чтобы состояние зарядки могло превышать пороговое значение. Длительность этого окна контроля может быть вычислено оперативно или калибровано в виде фиксированного значения. При этом оперативное вычисление означает непрерывное определение и согласование окна контроля на основании фактических величин относительно состояния батареи и измерений батареи.
При оперативном вычислении могут быть оперативно актуализированы параметры и состояния модели с применением фильтров Кальмана или других адаптивных способов оценки, с целью получения наилучшего приближения модели к фактическим состояниям и измерениям батареи. Эквивалентную схему можно использовать затем для оценки времени разрядки емкостной части виртуальных элементов ZARC на основе оцениваемого или измеренного тока нагрузки транспортного средства в любой момент времени.
На фиг.8 показана реализация оперативного алгоритма для оценки времени разрядки виртуальных емкостей на основании измеренного тока нагрузки транспортного средства в любой момент времени. Следует отметить, что применяемая с помощью алгоритма эквивалентная схема обобщена с помощью n элементов ZARC. Значения омических и емкостных величин элементов ZARC и их соответствующие состояния (напряжения на элементах ZARC) актуализируются непрерывно и адаптивно.
Входными величинами в модель 8.1 батареи являются измеренное или оценочное напряжение U_Batt, ток IPS, который приходит от основного электроснабжения (осветительного генератора или преобразователя DCDC), общий ток IF нагрузки транспортного средства и температура U_Batt. Блок 8.2 адаптивно определяет параметры и состояния модели и создает оценки для RZ1 … RZn, CZ1 … CZn, UZ1 … UZn и UOC. Блок 8.3 вычисления времени разрядки принимает актуализированные значения омических и емкостных величин элементов ZARC и их состояния для начала цикла вычисления вместе с предположением, что батарея разряжается с общим током IF транспортного средства. Этот сценарий показан на фиг.9, где полярность конденсаторов указывает ток зарядки в батарею в момент времени перед подключением нагрузок транспортного средства. Блок вычисления времени разрядки вычисляет время до смены полярности или до
UZ1 = … = UZn = 0. (3)
Это время разрядки указывается на этапе 8.4 в качестве значения DisTime, как показано на фиг.8. Как и указательный флаг SOCMonFlag, который устанавливается и убирается с помощью алгоритма, который инициирует уменьшения напряжения, время разрядки вычисляется непрерывно и непосредственно после уменьшения напряжения вводится в алгоритм идентификации, который контролирует ток разрядки.
Время разрядки можно также вычислять автономно с применением модели батареи для определенного порогового значения состояния зарядки и зависимого от температуры напряжения уравнительной зарядки в диапазоне рабочих температур и токов нагрузки. Кроме того, его можно также измерять на кондиционированной батарее во время ряда испытаний на испытательном стенде. Результаты можно применять в справочной таблице, которая задает время разрядки DisTime относительно тока нагрузки транспортного средства и температуры батареи.
Может быть также реализовано решение, в котором принимается постоянное время разрядки, которое не зависит от температуры и тока нагрузки. Как уже указывалось выше, алгоритм идентификации может быть выполнен так, что он является по существу консервативным, посредством выбора промежутка времени контроля, который больше действительного времени разрядки виртуальных конденсаторов элементов ZARC. За счет этого может происходить ошибочная положительная идентификация состояния зарядки ниже порогового значения, однако ошибочные отрицательные идентификации, которые не обнаруживают низкое состояние зарядки, являются редкостью. Таким образом, можно применять минимальную реализацию, в которой применяется постоянный калиброванный промежуток времени разрядки с предположением, что может происходить иногда ошибочная положительная идентификация условия низкого состояния зарядки. Устранение низкого состояния зарядки состоит обычно в полной зарядке батареи, что не сказывается значительно на мощности транспортного средства.
Алгоритм идентификации согласно изобретению контролирует ток батареи, после возникновения падения напряжения батареи, в течение промежутка времени контроля. Если в течение промежутка времени разрядки измеряется лишь ток разрядки, то определяется, что состояние зарядки лежит выше калиброванного порогового значения. Однако если в промежуток времени разрядки не измеряется ток батареи или ток нагрузки, то определяется, что состояние зарядки лежит ниже калиброванного порогового значения, и включается флаг низкого состояния зарядки (Niedrig-SOC-Flag). На фиг.10 показан этот алгоритм идентификации состояния зарядки.
Алгоритм включается на этапе 10.1 вместе с источником тока, который заряжает батарею. Процесс идентификации начинается, когда возникает уменьшение напряжения, которое определяется с помощью перехода от низкого к высокому значению флага SOCMonFlag. Флаг может периодически формироваться с помощью таймера, который, кроме того, управляет номинальным значением напряжения, или же может формироваться с помощью алгоритма, который сигнализирует изменения номинального значения напряжения за счет регенеративного торможения или селективных стратегий зарядки.
Если флаг SOCMonFlag установлен на значение 1 (этап 10.2), то начинается процесс идентификации, и на этапе 10.3 устанавливается отметка времени. Кроме того, контролируется ток I_Batt батареи. Пока происходит разрядка, определяется, что состояние зарядки батареи лежит выше калиброванного порогового значения (этапы 10.4 и 10.5), и флаг LowSOC устанавливается на низкое значение (этап 10.6). Однако, если во время процесса идентификации ток разрядки падает до нуля или измеряется ток зарядки, то определяется, что состояние зарядки лежит ниже калиброванного порогового значения, и флаг LowSOC устанавливается на высокое значение (этап 10.7).
Процесс идентификации продолжается в течение всего промежутка времени контроля, который является суммой из оцениваемого или калиброванного времени разрядки DisTime и калиброванного параметра DisDelay. Если проверка на этапе 10.4 показывает, что прошедшее время больше суммы из DisTime и DisDelay, то флаг SOCMonFlag устанавливается на низкое значение (этап 10.8). Время разрядки DisTime можно вычислять оперативно, или же можно вычислять автономно, и оно задается в виде функции порогового значения состояния зарядки, тока нагрузки и температуры. В минимальной реализации время разрядки можно выбирать в виде постоянного значения.
Параметр DisDelay представляет промежуток времени, который прибавляется к оцениваемому или калиброванному времени разрядки, с целью обеспечения окончания промежутка времени контроля сразу после фактического времени разрядки. При этом промежуток времени контроля заканчивается предпочтительно сразу после фактического времени разрядки, с целью исключения ошибочных отрицательных идентификаций низкого состояния зарядки. В случае минимальной реализации, значения DisDelay и DisTime можно также комбинировать с образованием одного единственного калиброванного параметра.
Алгоритм согласно изобретению можно применять для управления электроснабжением для инициирования устранения проблем, когда обнаруживается низкое состояние зарядки, или для включения заданных функций транспортного средства, когда состояние зарядки превышает заданное пороговое значение. Если выбрано определяемое уравнением (1) пороговое значение состояния зарядки, с целью обеспечения возможности различия между состоянием зарядки большой мощности для работы транспортного средства и низким состоянием зарядки, можно применять алгоритм, например, для инициирования устранения проблемы с помощью флага LowSOC. Если определяется низкое состояние зарядки, то работу батареи необходимо прерывать в состоянии частичной зарядки. Необходимо инициировать уравнительную зарядку, пока либо не закончится калиброванный промежуток времени зарядки, либо последующие идентификации состояния зарядки показывают, что состояние зарядки снова повысилось выше калиброванного порогового значения, которое может быть больше, чем которое применяется для инициирования низкого состояния зарядки, с целью интегрирования гистерезиса в стратегию устранения проблем.
Способ сравнения состояния зарядки согласно изобретению может быть реализован также с несколькими пороговыми значениями, которые можно применять для включения или выключения нескольких режимов работы. Одно пороговое значение можно применять для сравнения во время каждого понижения напряжения батареи. В зависимости от применения, пороговые значения можно применять попеременно внутри комплекта калибровки, или же можно применять новое пороговое значение в зависимости от работы транспортного средства и электроснабжения.
Например, устранение проблемы может быть инициировано в случае низкого состояния зарядки при более низком состоянии зарядки, чем состояние, которое необходимо для работы в режиме остановок и начала движения. Применение порогового значения для низкого состояния зарядки может происходить при каждом втором событии контроля, и применение для включения работы с остановками и началом движения может происходить во время остальных промежуточных событий. Если состояние зарядки определяется между двумя пороговыми значениями, то можно выключать работу с остановками и началом движения, без устранения низкого состояния зарядки.
В другом варианте выполнения можно устанавливать отдельные пороговые значения состояния зарядки для включения устранения низкого состояния зарядки во время движения транспортного средства, и для временного выключения такого устранения. Это можно применять в подключаемых к сети гибридных и электрических транспортных средствах, с целью максимизации радиуса действия в электрическом режиме движения. В этом случае периодически применяется пороговое значение для определения низкого состояния зарядки LowSOCThresh во время движения транспортного средства, пока не будет определено условие низкого состояния зарядки. Когда это происходит, то применяется стратегия устранения проблемы. Таким образом, батарея заряжается зависимым от температуры напряжением уравнительной зарядки. Если это происходит во время движения, то состояние зарядки контролируется иногда с применением второго, более высокого порогового значения DelayMitThresh. Если состояние зарядки затем идентифицируется как более высокое, чем DelayMitThresh, то полное устранение низкого состояния зарядки откладывается до следующей зарядки транспортного средства от сети. В этом случае стратегия состояния частичной зарядки может продолжаться до окончания поездки.
Реферат
Изобретение относится к области электротехники. Заявлен способ контроля состояния зарядки батареи транспортного средства. Технический результат заключается в создании более простого способа контроля состояния зарядки батареи, с помощью которого можно обеспечивать достаточно высокое состояние зарядки батареи. Достигается тем, что ток батареи определяется в моменты времени, в которые напряжение зарядки батареи снижается до заданного предельного значения. Определяемый таким образом ток батареи передается в блок оценки, который формирует сигнал предупреждения, если с помощью определяемого тока батареи в течение заданного промежутка времени контроля не измеряется разрядка батареи. Предельное значение напряжения зарядки батареи выбрано так, что с помощью алгоритма согласно изобретению можно идентифицировать, лежит ли состояние зарядки батареи выше или ниже порогового значения, выше которого гарантируется способность батареи выполнять определенные электрические функции. 7 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Система зарядки аккумуляторной батареи для гибридных транспортных средств
Устройство и способ управления для использования в блоке преобразования напряжения
Комментарии