Система управления зарядом для автоматически управляемого транспортного средства - RU2576668C1
Код документа: RU2576668C1
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к системе управления зарядом для автоматически управляемого транспортного средства, которое движется без водителя с использованием электроэнергии аккумулятора, смонтированного на нем в качестве источника приведения в движение, и выполняет зарядку аккумулятора, смонтированного на транспортном средстве, в зарядной станции.
УРОВЕНЬ ТЕХНИКИ
[0002] Автоматически управляемое транспортное средство согласно JP2007-74800A монтирует никель-металлогидридный аккумулятор или литий-ионный аккумулятор, который может быть использован даже в случае частичного зарядки и разрядки, в качестве аккумулятора. В этом автоматически управляемом транспортном средстве зарядка начинается, когда оставшаяся емкость аккумулятора становится емкостью для начала зарядки, и зарядка прекращается, когда оставшаяся емкость достигает емкости для прекращения зарядки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В настоящее время обычная практика заключается в том, чтобы использовать множество автоматически управляемых транспортных средств на сборочной технологической линии таким образом, что они движутся по маршруту движения, на котором сборочные части загружаются на станции сортировки, сборочные части переносятся на сборочную станцию, сборочные части разгружаются в сборочной станции, и автоматически управляемое транспортное средство затем снова возвращается на станцию сортировки. Множество автоматически управляемых транспортных средств непрерывно управляются таким образом, чтобы последовательно подавать сборочные части, требуемые в сборочной станции, и двигаться по замкнутой траектории и перемещаться между станцией сортировки и сборочной станцией.
[0004] Во множестве автоматически управляемых транспортных средств, непрерывно управляемых таким образом, оставшаяся емкость аккумулятора, смонтированного на них, изменяется в неравной степени в зависимости от нагрузки, такой как вес сборочных частей, смонтированных на автоматически управляемом транспортном средстве. Емкость аккумулятора, части автоматически управляемых транспортных средств, может понижаться раньше емкостей аккумулятора других автоматически управляемых транспортных средств. Автоматически управляемое транспортное средство, емкость аккумулятора которого понижается раньше, имеет высокую частоту зарядки в зарядной станции и требует большего времени зарядки по сравнению с другими автоматически управляемыми транспортными средствами. По этой причине, возникает такая проблема, что в случае, если множество автоматически управляемых транспортных средств движется по замкнутой траектории и перемещается на идентичном маршруте движения, невозможно обеспечивать время зарядки для автоматически управляемого транспортного средства, емкость аккумулятора которого понижается раньше.
[0005] Настоящее изобретение осуществлено посредством фокусирования на такой традиционной проблеме. Задача настоящего изобретения заключается в том, чтобы предоставлять систему управления зарядом для автоматически управляемого транспортного средства, подходящую для обеспечения времени зарядки в пределах цикла движения по замкнутой траектории для множества автоматически управляемых транспортных средств, которые движутся по замкнутой траектории и перемещаются на идентичном маршруте движения.
[0006] Система, согласно настоящему изобретению для управления зарядом каждого из множества автоматически управляемых транспортных средств, которые движутся по маршруту с замкнутой траекторией без водителя с использованием аккумулятора, смонтированного на них в качестве источника приведения в движение, причем аккумулятор заряжается в зарядной станции, которая устанавливается в предварительно определенной позиции по маршруту с замкнутой траекторией, включает в себя: модуль записи напряжения после зарядки для записи напряжения после зарядки в зарядной станции для каждого из автоматически управляемых транспортных средств; модуль задания приоритета заряда для установления приоритета заряда для каждого из автоматически управляемых транспортных средств на основе значений напряжения для напряжений после зарядки, записанных в модуль записи напряжения после зарядки; и модуль задания целевых значений зарядки для установления целевого значения зарядки для каждого из автоматически управляемых транспортных средств на основе приоритетов заряда, установленных посредством модуля задания приоритета заряда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является принципиальной схемой, иллюстрирующей примерный маршрут движения автоматически управляемого транспортного средства согласно варианту осуществления этого изобретения.
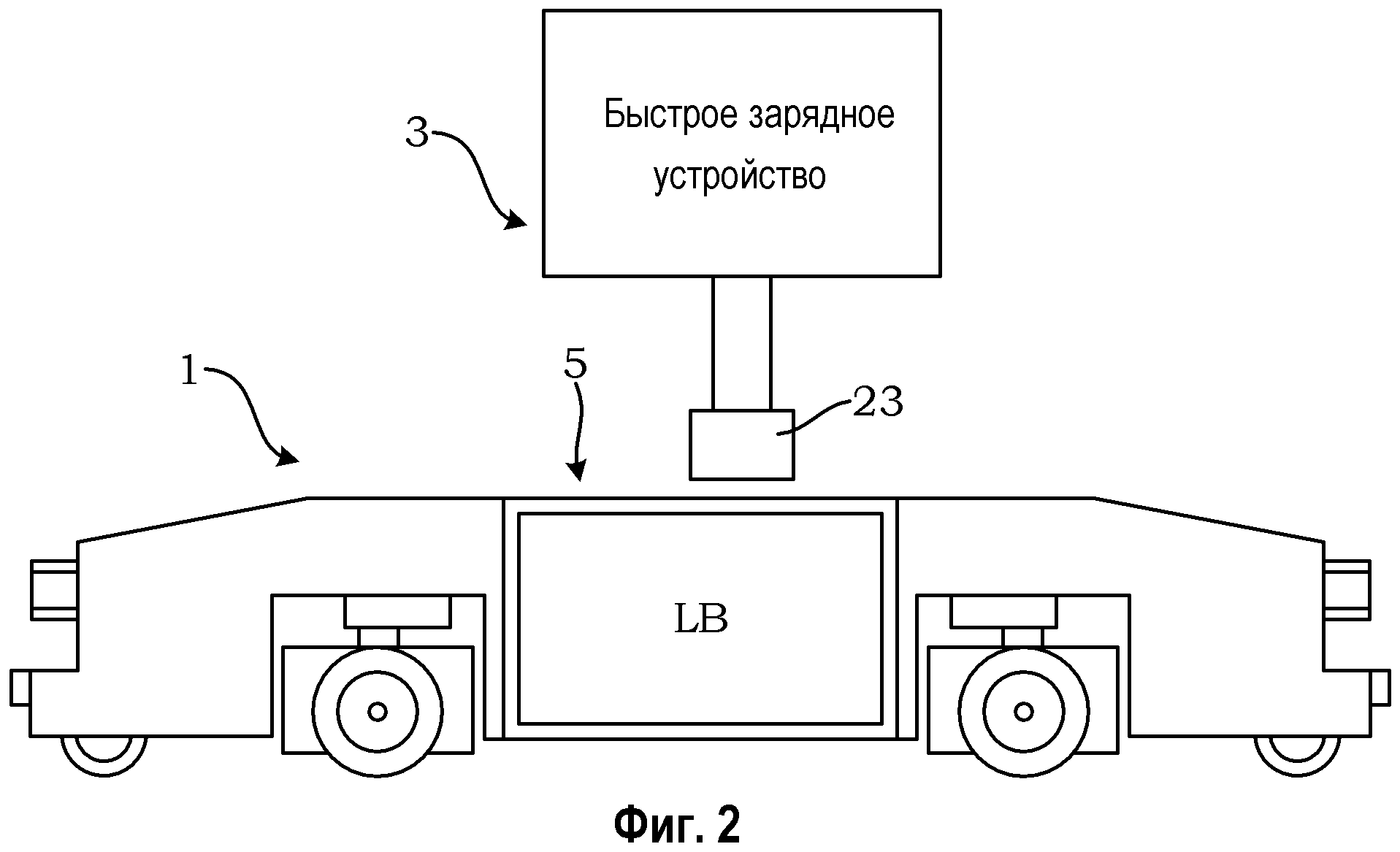
Фиг. 2 является пояснительным чертежом, иллюстрирующим конструкцию автоматически управляемого транспортного средства и автоматического зарядного устройства зарядной станции.
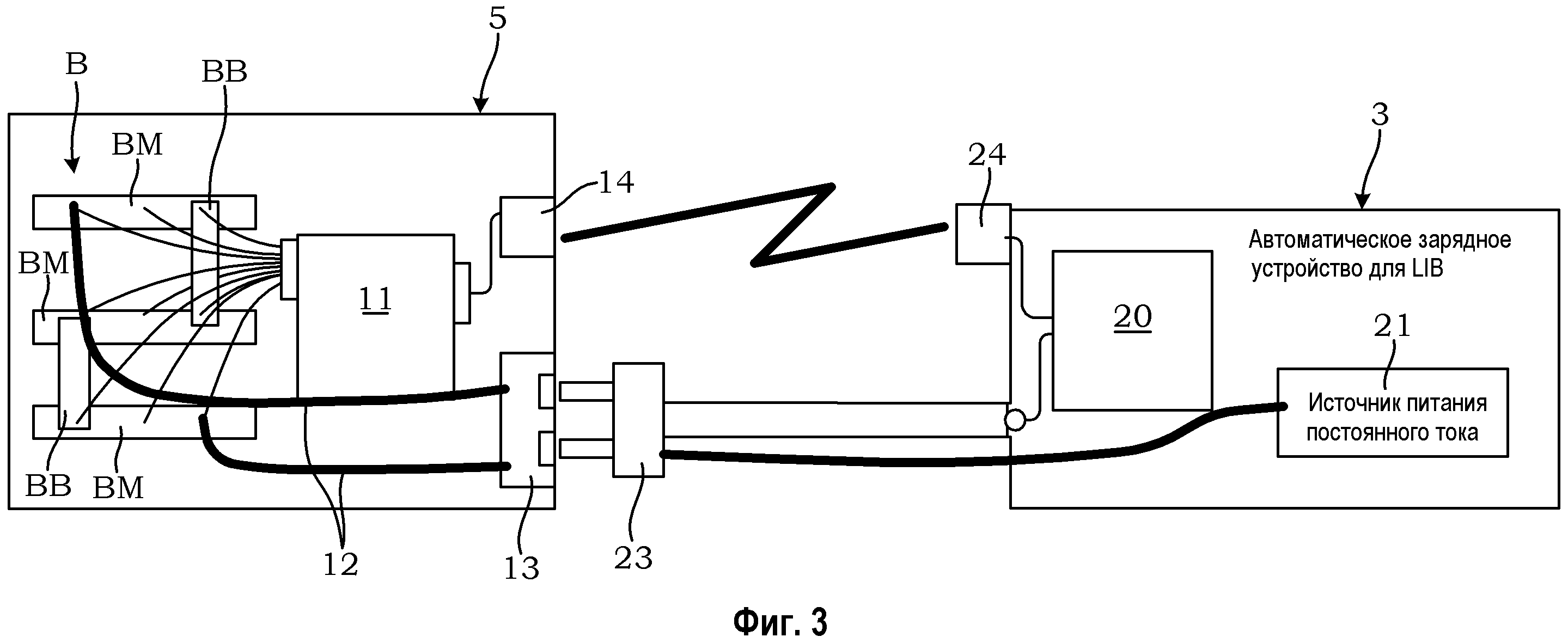
Фиг. 3 является пояснительным чертежом, показывающим взаимосвязь между аккумуляторным устройством автоматически управляемого транспортного средства и зарядным устройством аккумулятора в зарядной станции во время зарядки.
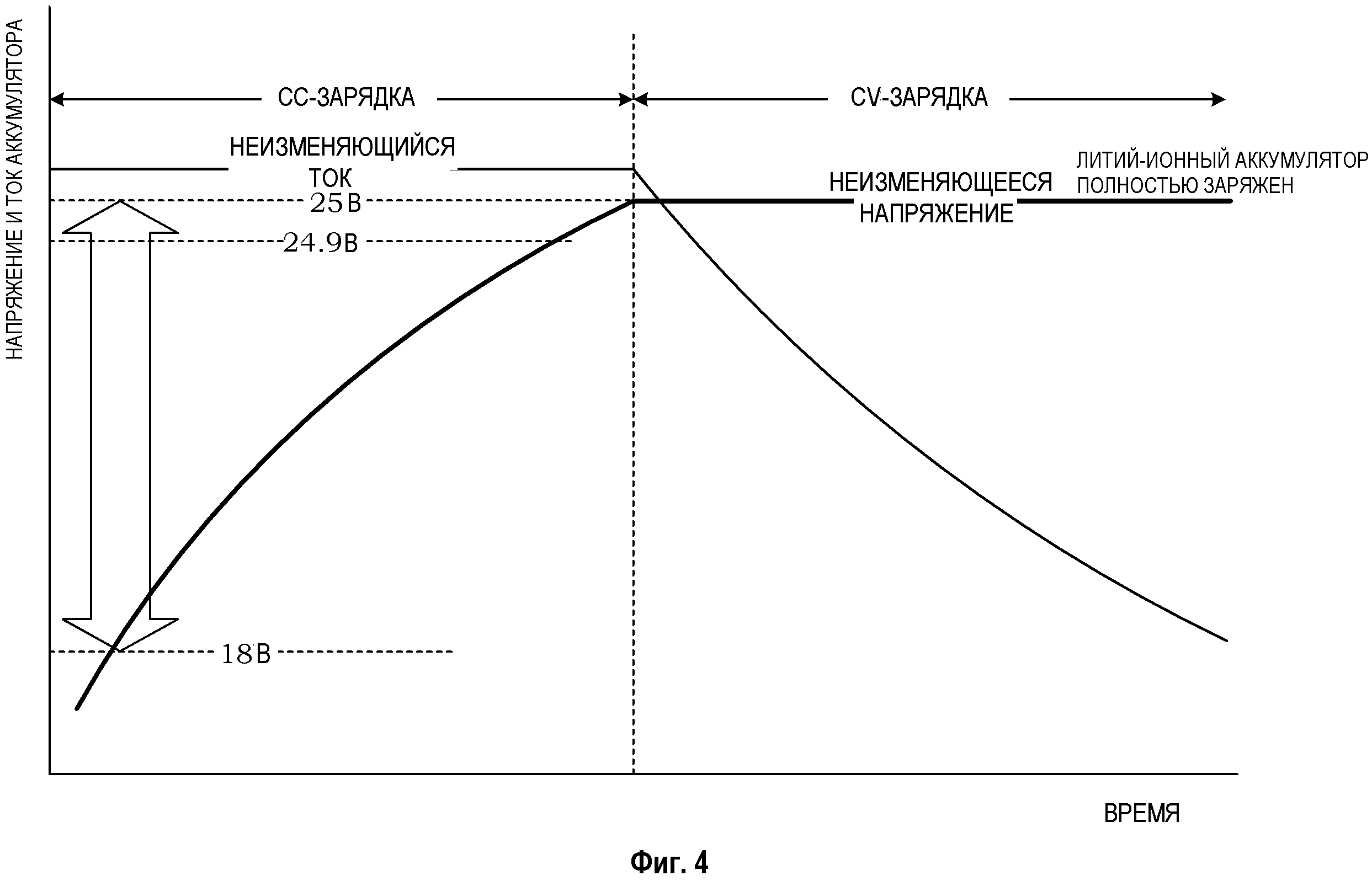
Фиг. 4 является диаграммой зарядной характеристики, показывающей изменение напряжения аккумулятора во время зарядки и изменение зарядного тока.
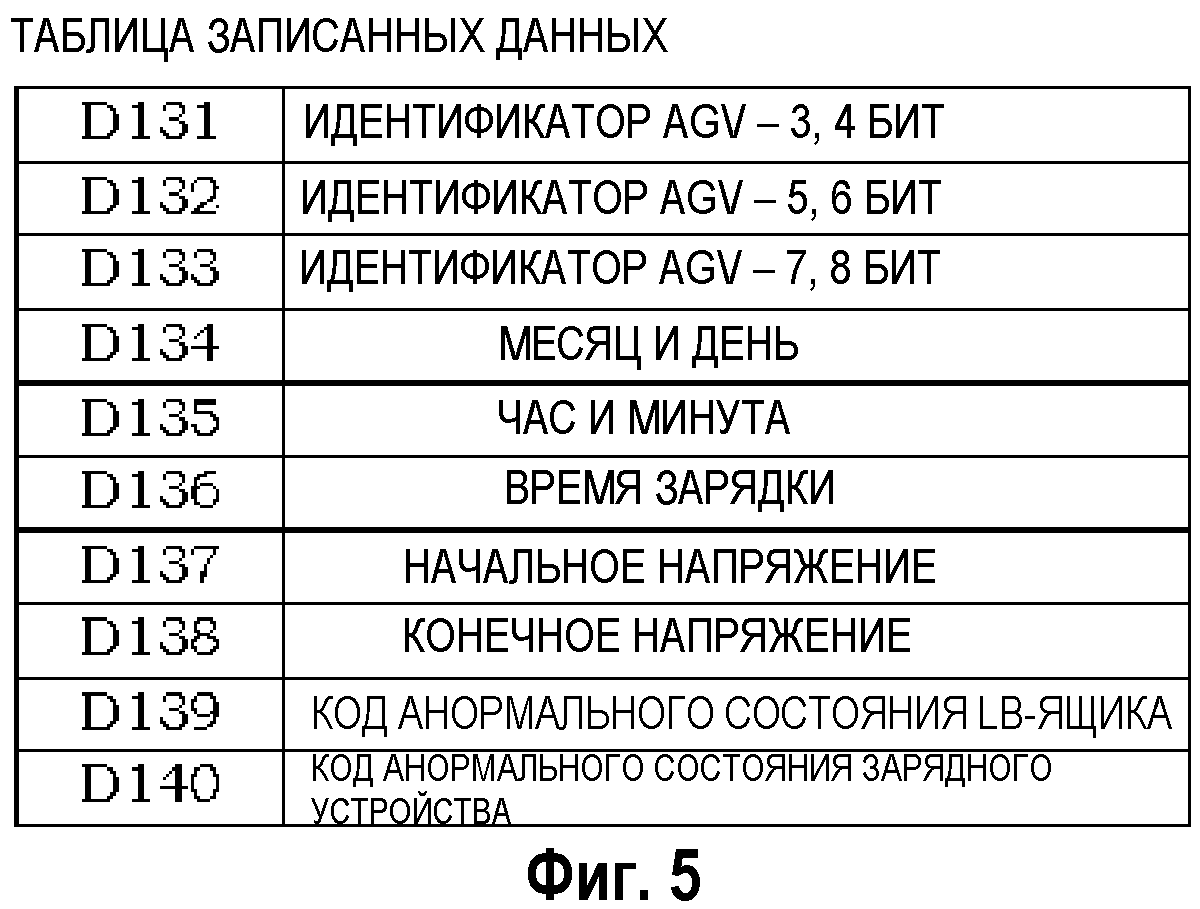
Фиг. 5 является пояснительным чертежом, показывающим пример таблицы записанных данных устройства управления на стороне оборудования.
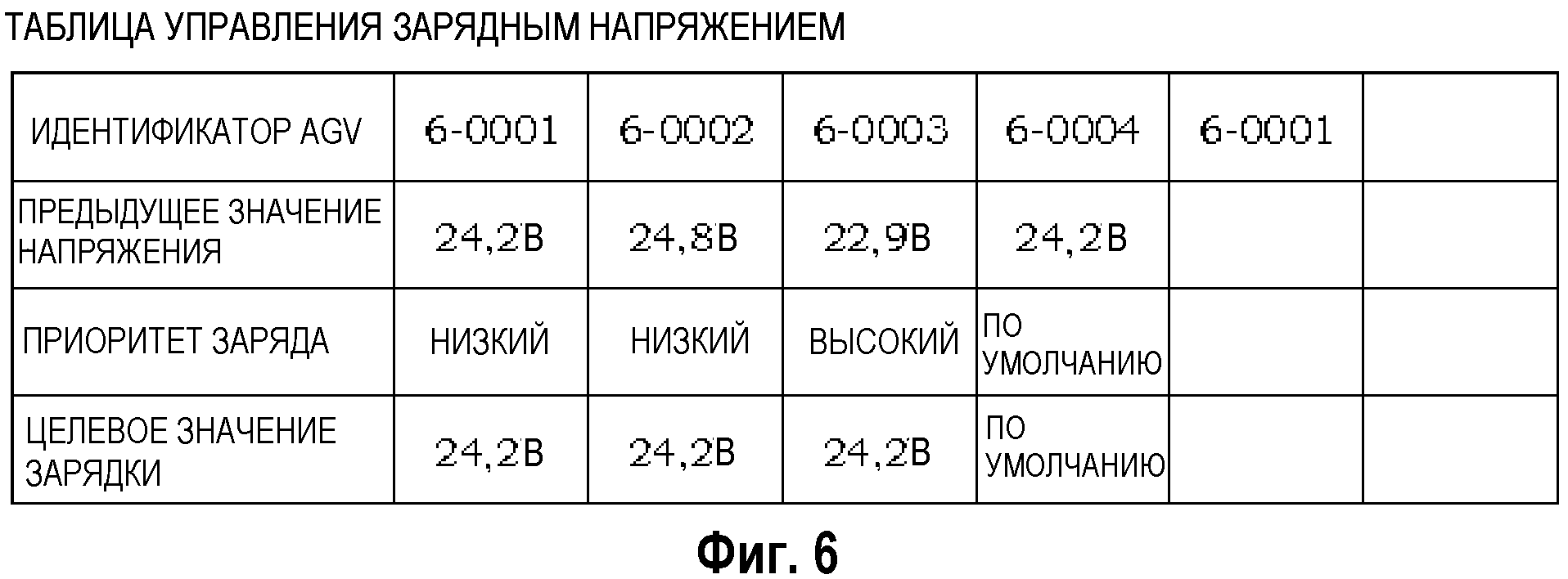
Фиг. 6 является таблицей управления зарядным напряжением для установления приоритета заряда и целевого значения зарядки для аккумулятора автоматически управляемого транспортного средства.
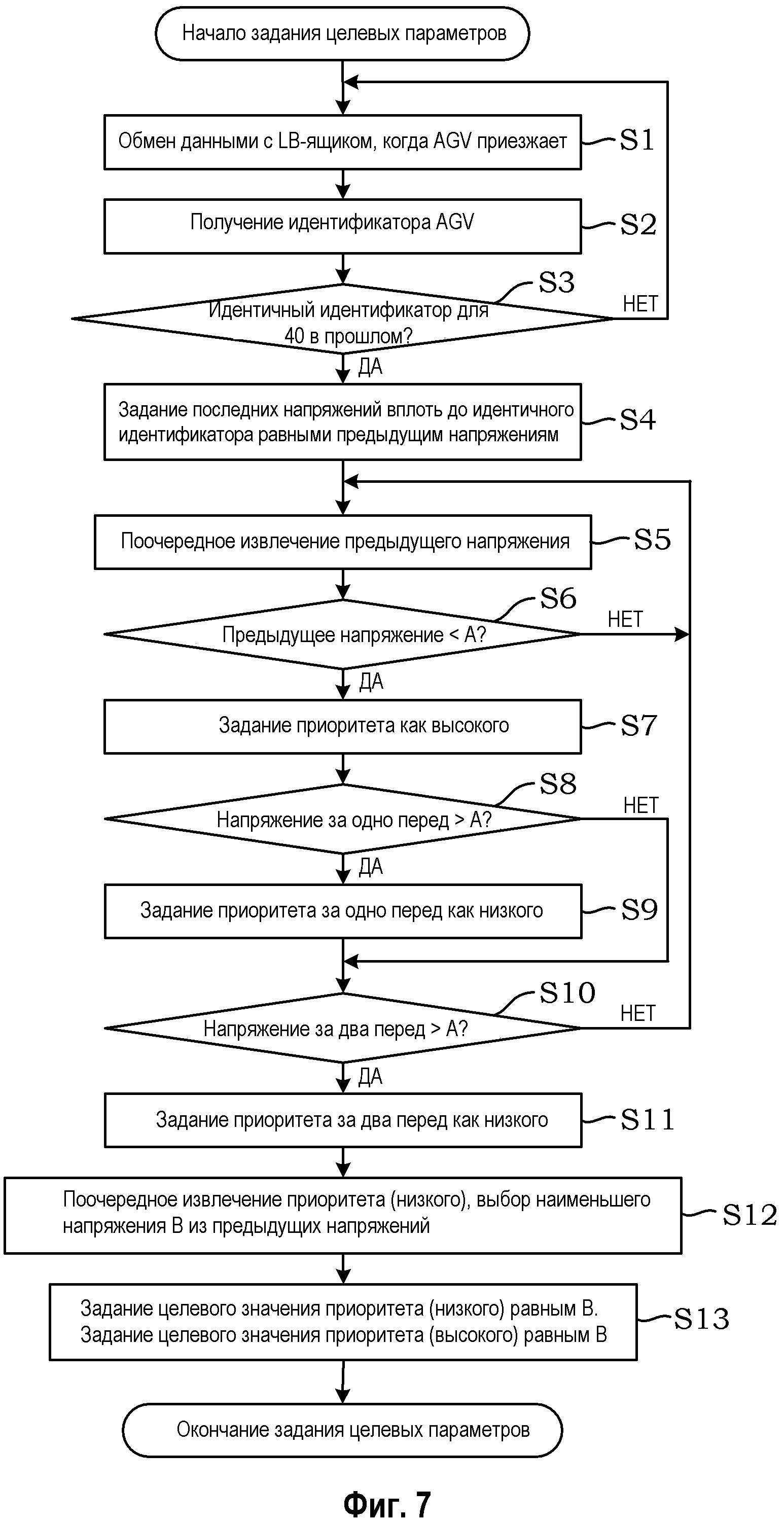
Фиг. 7 является блок-схемой последовательности операций способа для установления таблицы управления зарядным напряжением.
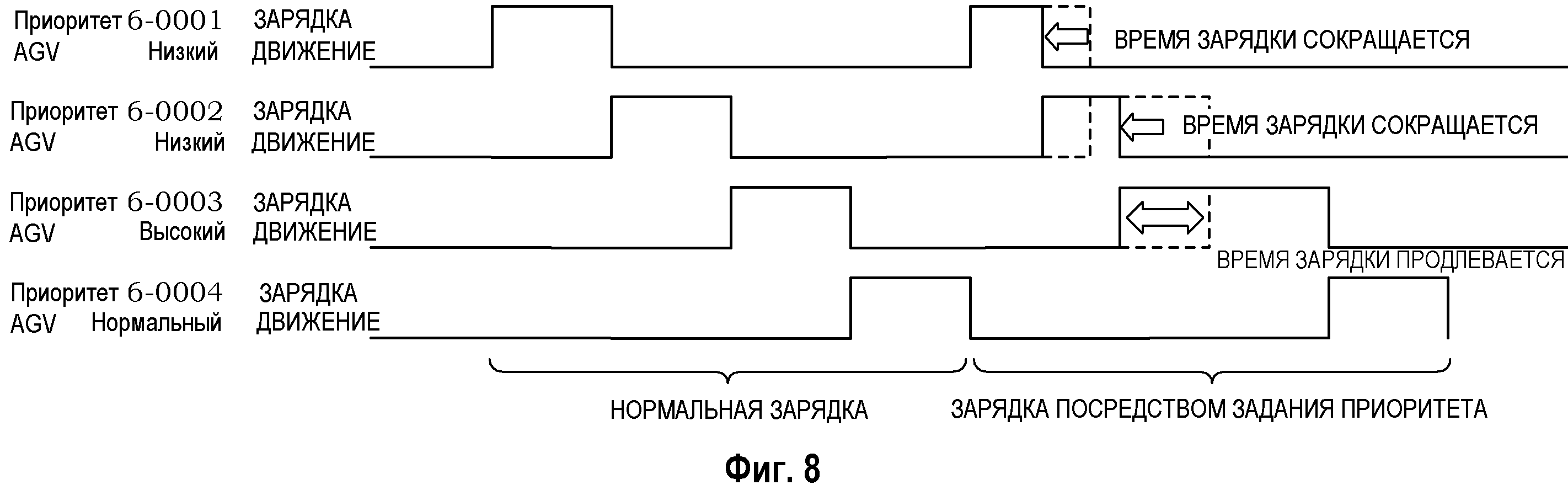
Фиг. 8 является временной диаграммой для пояснения изменения во времени зарядки на основе данных, установленных с использованием таблицы управления зарядным напряжением по Фиг. 6.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Далее описан вариант осуществления настоящего изобретения со ссылками на чертежи.
[0009] Курс движения для процесса транспортировки, в котором используются автоматически управляемые транспортные средства 1, представляет собой маршрут R движения с замкнутой траекторией, установленной таким образом, что она проходит через станцию PS сортировки и сборочную станцию BS технологической линии, например, как показано на Фиг. 1. В процессе транспортировки предусмотрена такая конфигурация, в которой множество автоматически управляемых транспортных средств 1 может двигаться на этом маршруте R движения, и движение каждого из автоматически управляемых транспортных средств 1 управляется посредством устройства 2 управления на стороне оборудования.
[0010] Автоматически управляемое транспортное средство 1 повторяет круговое движение, в котором части, требуемые в сборочной станции BS, загружаются на автоматически управляемое транспортное средство 1 на станции PS сортировки, автоматически управляемое транспортное средство 1 движется по маршруту R движения, чтобы транспортировать части в сборочную станцию BS, части, загруженные на станции PS сортировки, разгружаются, и автоматически управляемое транспортное средство 1 затем снова движется по маршруту R движения, чтобы возвращаться на станцию PS сортировки. Зарядная станция CS, включающая в себя автоматическое зарядное устройство 3, управляемое посредством устройства 2 управления на стороне оборудования, размещается, например, перед станцией PS сортировки по маршруту R движения. Дополнительно, наземные станции 4, каждая из которых выполняет передачу и прием сигналов между автоматически управляемым транспортным средством 1 и устройством 2 управления на стороне оборудования, устанавливаются, например, на входе и выходе в/из сборочной станции BS.
[0011] Как показано на Фиг. 2, автоматически управляемое транспортное средство 1 оснащается, например, ящиком 5 для аккумулятора в центре транспортного средства. Ящик 5 для аккумулятора размещает аккумулятор B, состоящий из аккумуляторной батареи (например, литий-ионной аккумуляторной батареи), монитор 11 зарядки /разрядки для мониторинга состояния аккумулятора B и т.п. Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора B в качестве источника мощности приведения в движение. Аккумулятор B содержит аккумуляторные модули BM, подключенные последовательно посредством шинных систем BB. На Фиг. 3, три аккумуляторных модуля BM подключены последовательно. Аккумуляторный модуль BM конфигурируется посредством параллельного или последовательного подключения друг к другу множества литий-ионных гальванических элементов (гальванических элементов). Напряжение этого аккумуляторного модуля BM составляет примерно чуть выше 8 В в состоянии зарядки. Поскольку три аккумуляторных модуля BM подключены последовательно в аккумуляторе B, выходное напряжение аккумулятора B становится равным примерно 25 В. Следовательно, напряжение избыточной зарядки аккумулятора B устанавливается, например, равным 25 В, и напряжение избыточной разрядки устанавливается, например, равным 18 В. Напряжение для определения того, требуется или нет зарядка, устанавливается равным напряжению между напряжением избыточной зарядки и напряжением избыточной разрядки, например, 24,9 В. В случае, если напряжение ниже этого напряжения, определяется то, что зарядка требуется. В случае, если напряжение выше этого напряжения, определяется то, что зарядка не требуется. Посредством задания разности напряжений между напряжением избыточной разрядки и напряжением, посредством которого определяется то, что зарядка должна начинаться или завершаться, большей таким способом, аккумулятор B таким образом защищается, чтобы не достигать напряжения избыточной разрядки, в силу которого прогрессирует ухудшение характеристик аккумулятора B.
[0012] Контактор 13 для поступления мощности размещается на концевом участке питающего кабеля 12 в направлении аккумулятора B таким образом, что он является доступным на наружной поверхности ящика 5 для аккумулятора. Контактору 23 для подачи мощности, который выдвигается или втягивается из автоматического зарядного устройства 3 в зарядной станции CS, инструктируется подключаться к этому контактору 13 для поступления мощности, за счет чего может заряжаться аккумулятор B.
[0013] Дополнительно, монитор 11 зарядки/разрядки отслеживает и вычисляет состояние зарядки аккумулятора B, состоящего из литий-ионного аккумулятора, как показано на Фиг. 3. Монитор 11 зарядки/разрядки работает таким образом, чтобы отслеживать и записывать зарядную/разрядную емкость (напряжение аккумулятора) и напряжение гальванического элемента аккумулятора B и каждого аккумуляторного источника питания, величину тока (ампер-час; А-ч) входа и выхода аккумулятора B, предысторию анормальности аккумулятора B и т.п. через каждое предварительно определенное время (10 мс). Дополнительно, монитор 11 зарядки/разрядки выполнен с возможностью допускать передачу этих видов информации в устройство 2 управления на стороне оборудования через наземную станцию 4 и автоматическое зарядное устройство 3 через модуль 14 связи (например, оптическую связь).
[0014] Дополнительно, монитор 11 зарядки/разрядки выполнен с возможностью отображать тот факт, что аккумулятор B находится в анормальном состоянии, в случае, если напряжение каждого гальванического элемента, составляющего аккумулятор B, переходит в состояние избыточной разрядки с пороговым значением выключения (например, 2,8-3 В) или ниже, и инструктировать автоматически управляемому транспортному средству 1 выключаться (анормально останавливаться). Установленное значение порогового значения выключения может изменяться и нормально устанавливается, например, равным 3,0 В. Тем не менее, пороговое значение выключения устанавливается равным более низкому установленному значению (например, 2,8 В) при прохождении через сборочную станцию BS по маршруту R движения, за счет этого исключая действие выключения в области сборочной станции BS. Более конкретно, команда запрещения выключения принимается из наземной станции 4, установленной на входе в сборочную станцию BS по маршруту R движения, через модуль 14 связи, установленное значение изменяется с 3,0 В на 2,8 В. Дополнительно, когда команда прекращения запрещения на выключение принимается из наземной станции 4, установленной на выходе из сборочной станции BS по маршруту R движения, через модуль 14 связи, установленное значение изменяется с 2,8 В на 3,0 В.
[0015] Автоматическое зарядное устройство 3 включает в себя: источник 21 питания постоянного тока, который может повышаться до верхнего предельного напряжения (например, 25 В) аккумулятора B; зарядный контроллер 20, который управляет значением зарядного тока и значением зарядного напряжения, которое должно подаваться и прикладываться к аккумулятору B посредством источника 21 питания постоянного тока; и модуль 24 связи, выполненный с возможностью допускать обмен данными с модулем 14 связи каждого из автоматически управляемых транспортных средств 1.
[0016] Модуль 24 связи выполнен с возможностью допускать обмен, с модулем 14 связи автоматически управляемого транспортного средства 1, данными по зарядной/разрядной емкости (напряжению) аккумулятора B, величине тока (ампер-час; AH) на входе и выходе аккумулятора B, предыстории анормальности аккумулятора B, другими сигналами команд управления и т.п.
[0017] Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора B в качестве источника мощности приведения в движение, и зарядная/разрядная емкость (напряжение) аккумулятора B понижается по мере того, как автоматически управляемое транспортное средство 1 движется. По этой причине, автоматически управляемому транспортному средству 1 инструктируют временно останавливаться, когда следует проходить через зарядную станцию CS, и зарядная/разрядная емкость аккумулятора B автоматически управляемого транспортного средства 1 подтверждается между автоматически управляемым транспортным средством 1 и автоматическим зарядным устройством 3 зарядной станции CS через модули 14, 24 связи. Затем, определяется то, должна или нет заряжаться зарядная/разрядная емкость (напряжение) аккумулятора B в это время (т.е. то, понижается или нет напряжение относительно порогового напряжения необязательности заряда) на стороне зарядной станции CS. В случае, если определяется то, что заряд требуется, аккумулятор B автоматически управляемого транспортного средства 1 заряжается посредством автоматического зарядного устройства 3.
[0018] Пороговое напряжение необязательности заряда устанавливается равным 24,9 В, например, как описано выше. А именно, определяется то, что зарядка требуется, в случае, если напряжение аккумулятора понижается относительно порогового напряжения необязательности заряда. Определяется то, что зарядка не требуется, в случае, если напряжение аккумулятора выше порогового напряжения необязательности заряда. Посредством задания разности напряжений между напряжением избыточной разрядки и пороговым напряжением необязательности заряда, в силу которого требуется зарядка, большей таким способом, аккумулятор B защищается таким образом, что аккумулятор B не достигает напряжения избыточной разрядки.
[0019] Когда контактору 23 для подачи мощности инструктируют выдвигаться в направлении контактора 13 для поступления мощности автоматически управляемого транспортного средства 1, и контактор 23 для подачи мощности подключается к контактору 13 для поступления мощности, автоматически управляемое транспортное средство 1 переходит в заряжаемое состояние посредством подтверждения этого соединения. Затем, электроэнергия заряда подается в автоматическое зарядное устройство 3 из источника 21 питания постоянного тока. Зарядный контроллер 20 может выполнять нормальную зарядку для способа при неизменяющемся токе и при неизменяющемся напряжении, чтобы заряжать аккумулятор B. Тем не менее, выполняется добавочный заряд для способа при неизменяющемся токе и при неизменяющемся напряжении, при котором в аккумулятор B подается зарядный ток, превышающий зарядный ток во время нормальной зарядки. Добавочный заряд является желательным для процесса транспортировки, в котором требуется заряд за короткое время. При зарядке по способу при неизменяющемся токе и при неизменяющемся напряжении, заряд при неизменяющемся токе (CC-заряд), при котором подается зарядный ток с неизменяющимся током, выполняется на ранних стадиях зарядки, а заряд при неизменяющемся напряжении (CV-заряд), при котором напряжение задается как неизменяющееся, переносится от времени, когда напряжение аккумулятора повышается до верхнего предельного напряжения для зарядки (например, 25 В) посредством зарядки, на время, когда истекает предварительно определенное время.
[0020] Фиг. 4 является диаграммой зарядной характеристики, показывающей изменение напряжения аккумулятора во время зарядки и изменение зарядного тока, который должен подаваться. Напряжение аккумулятора постепенно повышается посредством CC-заряда. Когда напряжение аккумулятора повышается до верхнего предельного напряжения для зарядки (например, 25 В), зарядка при неизменяющемся напряжении (CV-заряд) с неизменяющимся напряжением переносится от этого времени на время, когда истекает предварительно определенное время, тогда как зарядный ток понижается. Когда истекает предварительно определенное время, зарядный контроллер 20 отключает источник 21 питания постоянного тока, чтобы прекращать зарядку.
[0021] Дополнительно, также можно прекращать зарядку в качестве завершения зарядки в момент, когда напряжение аккумулятора автоматически управляемого транспортного средства 1 повышается до порогового напряжения необязательности заряда посредством выполнения CC-заряда. Дополнительно, также можно прекращать зарядку в качестве завершения зарядки, когда CC-заряд выполняется только в течение предварительно определенного времени, установленного заранее, чтобы повышать напряжение аккумулятора автоматически управляемого транспортного средства 1 посредством времени зарядки. В случае, если зарядка завершается в момент, когда следует повышать напряжение аккумулятора до порогового напряжения необязательности заряда, или только в течение предварительно определенного времени таким образом, можно сокращать время зарядки. По этой причине, целесообразно заряжать аккумулятор B каждого из автоматически управляемых транспортных средств 1, которые движутся по замкнутой траектории по маршруту R движения. В настоящем варианте осуществления, приспосабливается способ прекращения заряда, в котором зарядка выполняется только в течение предварительно определенного времени и зарядка после этого прекращается.
[0022] Когда зарядка аккумулятора B завершается в зарядной станции CS, автоматическое зарядное устройство 3 определяет то, что зарядка завершается, и инструктирует контактору 23 для подачи мощности убираться, за счет этого прерывая соединение с контактором 13 для поступления мощности автоматически управляемого транспортного средства 1. Когда соединение между контакторами 13, 23 прерывается, автоматически управляемому транспортному средству 1 инструктируют выезжать из зарядной станции CS и двигаться по маршруту R движения.
[0023] Между тем, множество автоматически управляемых транспортных средств 1, описанных выше, непрерывно управляются таким образом, чтобы последовательно подавать сборочные части, требуемые в сборочной станции BS, и двигаться по замкнутой траектории и перемещаться между станцией PS сортировки и сборочной станцией BS. Во множестве автоматически управляемых транспортных средств 1, непрерывно управляемых таким образом, выполняется операция, в которой автоматически управляемому транспортному средству 1 инструктируют останавливаться в зарядной станции CS в ходе каждого движения по замкнутой траектории и перемещения, и величина электроэнергии, потребляемой посредством движения по замкнутой траектории и перемещения, заряжается в аккумуляторе B, смонтированном на нем, посредством автоматического зарядного устройства 3 в течение чрезвычайно короткого времени (например, одной минуты), включенного в цикл с замкнутой траекторией.
[0024] Здесь, оставшаяся емкость аккумулятора B, смонтированного на нем, изменяется в неравной степени в зависимости от нагрузки, такой как вес сборочных частей, смонтированных на автоматически управляемом транспортном средстве 1. Емкость аккумулятора части автоматически управляемых транспортных средств 1 может понижаться раньше емкостей аккумулятора других автоматически управляемых транспортных средств 1. Необходимо задавать время зарядки, для автоматически управляемого транспортного средства 1, емкость аккумулятора которого понижается, в зарядной станции CS, большим по сравнению с другими автоматически управляемыми транспортными средствами 1, чтобы за счет этого восстанавливать аналогичную емкость аккумулятора до емкостей других автоматически управляемых транспортных средств 1. По этой причине, необходимо обеспечивать время зарядки для автоматически управляемого транспортного средства 1, емкость аккумулятора которого понижается по сравнению с другими автоматически управляемыми транспортными средствами 1 в пределах цикла с замкнутой траекторией, в котором множество автоматически управляемых транспортных средств 1 движутся по замкнутой траектории и перемещаются на идентичном маршруте R движения.
[0025] Система управления зарядом для автоматически управляемого транспортного средства согласно настоящему варианту осуществления разрешает такую проблему и предоставляет систему управления зарядом для автоматически управляемых транспортных средств 1, допускающую обеспечение времени зарядки в пределах цикла движения по замкнутой траектории и перемещения для множества автоматически управляемых транспортных средств 1, которые движутся по замкнутой траектории и перемещаются на идентичном маршруте R движения.
[0026] По этой причине, в настоящем варианте осуществления, индивидуальный идентификационный (ID) номер устанавливается для каждого из автоматически управляемых транспортных средств 1; идентификационный номер автоматически управляемого транспортного средства 1 считывается в зарядной станции CS; состояние зарядки для каждого из автоматически управляемых транспортных средств 1 в зарядной станции CS записывается. Таблица записанных данных, в которую записываются эти данные в порядке времени прохождения, предоставляется в устройстве 2 управления на стороне оборудования. Устройство 2 управления на стороне оборудования выполняет блок-схему последовательности операций способа для вычисления порядка приоритета заряда и цели зарядки на основе данных в таблице записанных данных и устанавливает порядок приоритета заряда и цель зарядки каждого из автоматически управляемых транспортных средств 1 в таблице управления зарядным напряжением.
[0027] Идентификационные номера автоматически управляемых транспортных средств 1, дата и время прохождения, а также час и минута прохождения, время зарядки для аккумулятора B, напряжение до зарядки аккумулятора B, напряжение после зарядки аккумулятора B и т.п. получаются из зарядной станции CS каждый раз, когда автоматически управляемое транспортное средство 1 останавливается в зарядной станции CS. Эти данные записываются в таблицу записанных данных в порядке времени прохождения, как показано на Фиг. 5. Коды анормальных состояний аккумулятора, коды анормальных состояний зарядного устройства аккумулятора и т.п. дополнительно записываются в эту таблицу записанных данных при необходимости. Эти данные записываются, например, для 1000 случаев в прошлом. Эти данные обновляются до актуальных данных посредством стирания самых старых данных каждый раз, когда записываются новые данные.
[0028] Таблица управления зарядным напряжением используется для установления цели зарядки автоматически управляемого транспортного средства 1 с каждым идентификатором, как показано на Фиг. 6. Будущий приоритет заряда и целевое значение зарядки автоматически управляемого транспортного средства 1, имеющего каждый идентификационный номер, могут устанавливаться на основе напряжения после зарядки в предыдущий раз автоматически управляемого транспортного средства 1 с каждым идентификатором. Будущий приоритет заряда и целевое значение зарядки автоматически управляемого транспортного средства 1, имеющего каждый идентификационный номер, устанавливаются посредством выполнения блок-схемы последовательности операций способа управления, показанной на Фиг. 7.
[0029] В дальнейшем в этом документе, подробно описывается система управления зарядом для автоматически управляемых транспортных средств 1 согласно настоящему варианту осуществления на основе блок-схемы последовательности операций способа управления, показанной на Фиг. 7.
[0030] Когда автоматически управляемое транспортное средство 1 движется по маршруту R движения и приезжает в зарядную станцию CS, автоматически управляемое транспортное средство 1 останавливается в предварительно определенной позиции относительно автоматического зарядного устройства 3. Автоматическое зарядное устройство 3 начинает обмениваться данными с модулем 14 связи автоматически управляемого транспортного средства 1 через модуль 24 связи (этап S1). Затем, получается индивидуальный идентификатор автоматически управляемого транспортного средства 1 (этап S2), и определяется то, существует или нет автоматически управляемое транспортное средство 1 с идентичным идентификатором, например, из числа сорока автоматически управляемых транспортных средств 1, которые проходили через зарядную станцию CS в прошлом (этап S3).
[0031] При этом определении, в случае, если существует автоматически управляемое транспортное средство 1 с идентичным идентификатором из числа автоматически управляемых транспортных средств 1, проходящих таким способом, значения напряжения после зарядки автоматически управляемых транспортных средств 1 из автоматически управляемого транспортного средства 1 с идентичным идентификатором вплоть до настоящего времени устанавливаются равными значениям напряжения в предыдущий раз согласно соответствующим идентификаторам (этап S4). Здесь, напряжение ID6-0001 составляет 24,2 В, напряжение ID6-0002 составляет 24,8 В, напряжение ID6-0003 составляет 22,9 В, и напряжение ID6-0004 составляет 24,2 В. Посредством извлечения автоматически управляемого транспортного средства 1 с идентичным идентификатором, которое прошло в предыдущий раз, таким способом, можно указывать число для множества автоматически управляемых транспортных средств 1, которые движутся по замкнутой траектории и перемещаются по маршруту R движения. Заполняются опорные данные для установления приоритета заряда и цели зарядки, когда следует заряжаться в следующий раз.
[0032] Затем, поочередно извлекаются значения напряжения в предыдущий раз (этап S5), и определяется то, существует или нет автоматически управляемое транспортное средство 1, в котором значение напряжения в предыдущий раз ниже приоритетного значения A зарядного напряжения (этап S6). Приоритетное значение A зарядного напряжения может устанавливаться равным значению напряжения, посредством которого автоматически управляемому транспортному средству 1 разрешается двигаться по замкнутой траектории по маршруту R движения в надлежащее время, или среднему значению из значений напряжения после зарядки. Здесь, приоритетное значение A зарядного напряжения устанавливается, например, равным 24 В. При этом определении, в случае, если существует автоматически управляемое транспортное средство 1, в котором значение напряжения в предыдущий раз является значением напряжения ниже приоритетного значения A зарядного напряжения, приоритет заряда для идентификатора автоматически управляемого транспортного средства 1 устанавливается как высокий (высокий) (этап S7). Здесь, поскольку значение напряжения в предыдущий раз ID6-0003 составляет 22,9 В и является значением напряжения ниже приоритетного значения A зарядного напряжения, приоритет заряда ID6-0003 устанавливается как высокий.
[0033] Затем, определяется то, является или нет значение напряжения в предыдущий раз автоматически управляемого транспортного средства 1, которое движется непосредственно перед (за одно перед) автоматически управляемым транспортным средством 1 с идентификатором, приоритет заряда которого задается как высокий, значением напряжения, превышающим приоритетное значение A зарядного напряжения (этап S8). При этом определении, в случае, если значение напряжения в предыдущий раз является значением напряжения, превышающим приоритетное значение A зарядного напряжения, приоритет заряда для идентификатора устанавливается как низкий (низкий) (этап S9). Здесь, поскольку значение напряжения в предыдущий раз ID6-0002 составляет 24,8 В и является значением напряжения, превышающим приоритетное значение A зарядного напряжения, приоритет заряда ID6-0002 устанавливается как низкий.
[0034] Затем, определяется то, является или нет значение напряжения в предыдущий раз автоматически управляемого транспортного средства 1, которое движется за два перед автоматически управляемым транспортным средством 1 с идентификатором, приоритет заряда которого задается как высокий, значением напряжения, превышающим приоритетное значение A зарядного напряжения (этап S10). При этом определении, в случае, если значение напряжения в предыдущий раз является значением напряжения, превышающим приоритетное значение A зарядного напряжения, приоритет заряда для идентификатора устанавливается как низкий (низкий) (этап S11). Здесь, поскольку значение напряжения в предыдущий раз ID6-0001 за два перед составляет 24,2 В и является значением напряжения, превышающим приоритетное значение A зарядного напряжения, приоритет заряда ID6-0001 устанавливается как низкий.
[0035] Затем, поочередно извлекаются идентификаторы, для которых приоритеты заряда устанавливаются как низкие, и выбирается наименьшее значение B напряжения из значений напряжения в предыдущий раз (этап S12). После этого, целевое значение зарядки для идентификатора, для которого приоритет заряда устанавливается как низкий, устанавливается равным значению B напряжения. Дополнительно, целевое значение зарядки для идентификатора, для которого приоритет заряда устанавливается как высокий, также устанавливается равным значению B напряжения (этап S13). Здесь, поскольку наименьшее значение B напряжения из значений напряжения в предыдущий раз для идентификаторов (ID6-0001, ID6-0002), приоритет которых устанавливается как низкий, составляет 24,2 В, целевое значение зарядки значения B напряжения каждого из идентификаторов (ID6-0001, ID6-0002), приоритет которых устанавливается как низкий, устанавливается равным 24,2 В. Дополнительно, целевое значение зарядки значения B напряжения для идентификатора (ID6-0003), приоритет которого устанавливается как высокий, также устанавливается равным 24,2 В.
[0036] Как описано выше, приоритет заряда автоматически управляемого транспортного средства 1 с идентификатором, для которого значение напряжения в предыдущий раз является значением напряжения ниже приоритетного значения A зарядного напряжения, устанавливается как высокий, и приоритет заряда автоматически управляемого транспортного средства 1 с идентификатором, для которого значение напряжения в предыдущий раз является значением напряжения, превышающим приоритетное значение A зарядного напряжения, устанавливается как низкий. Дополнительно, целевое значение зарядки напряжения каждого из автоматически управляемых транспортных средств 1 устанавливается равным наименьшему значению B напряжения из значений напряжения в предыдущий раз автоматически управляемых транспортных средств 1 с идентификаторами, для которых приоритет заряда устанавливается как низкий. Посредством установления приоритетов заряда таким образом, время зарядки для автоматически управляемого транспортного средства 1 с идентификатором, для которого значение напряжения в предыдущий раз является значением напряжения, превышающим приоритетное значение A зарядного напряжения, и его приоритет заряда устанавливается как низкий, сокращается по сравнению со временем по умолчанию, как показано на Фиг. 8, поскольку напряжение для начала заряда автоматически управляемого транспортного средства 1 фактически является более высоким. Дополнительно, время зарядки для автоматически управляемого транспортного средства 1 с идентификатором, для которого значение напряжения в предыдущий раз является значением напряжения ниже приоритетного значения A зарядного напряжения, и его приоритет заряда устанавливается как высокий, становится большим времени по умолчанию, поскольку напряжение для начала заряда фактически является более низким. Тем не менее, поскольку время зарядки для едущего впереди автоматически управляемого транспортного средства 1 с идентификатором, для которого приоритет заряда задается как низкий, принудительно сокращается, можно применять (или добавлять) количество времени зарядки, сокращенное таким способом, ко времени зарядки для последующего автоматически управляемого транспортного средства 1 с идентификатором, для которого приоритет заряда устанавливается как высокий. По этой причине, это не нарушает или разрегулирует время цикла автоматически управляемых транспортных средств 1, которые движутся по замкнутой траектории и перемещаются по маршруту R движения.
[0037] В этом отношении, в варианте осуществления, описанном выше, для того чтобы выбирать автоматически управляемое транспортное средство 1, приоритет заряда которого должен задаваться как низкий, извлечено и указано значение зарядного напряжения в предыдущий раз автоматически управляемого транспортного средства 1, которое едет впереди (движется перед) автоматически управляемого транспортного средства 1, для которого приоритет заряда устанавливается как высокий. Тем не менее, для того чтобы выбирать автоматически управляемое транспортное средство 1, приоритет заряда которого должен задаваться как низкий, могут извлекаться и указываться значения зарядного напряжения в предыдущий раз автоматически управляемых транспортных средств 1 впереди и позади автоматически управляемого транспортного средства 1, приоритет заряда которого задается как высокий. Дополнительно, могут извлекаться и указываться все автоматически управляемые транспортные средства 1, которые загружаются по маршруту R движения, за исключением автоматически управляемого транспортного средства 1, приоритет заряда которого задается как высокий.
[0038] Дополнительно, случай зарядки аккумулятора B до наименьшего напряжения после зарядки из числа автоматически управляемых транспортных средств 1, для каждого из которых приоритет заряда устанавливается как низкий, пояснен в качестве целевого значения зарядки. Тем не менее, настоящее изобретение не ограничено этим. Например, целевое значение зарядки может устанавливаться равным значению напряжения, посредством которого автоматически управляемому транспортному средству 1 разрешается двигаться по замкнутой траектории по маршруту R движения в надлежащее время, или среднему значению из значений напряжения после зарядки. Дополнительно, в качестве целевого значения зарядки, может сокращаться время зарядки для автоматически управляемого транспортного средства 1, приоритет заряда которого устанавливается как низкий, относительно времени зарядки, установленного на основе времени цикла с замкнутой траекторией автоматически управляемого транспортного средства 1. Может продлеваться время зарядки для автоматически управляемого транспортного средства 1, приоритет заряда которого устанавливается как высокий.
[0039] Настоящий вариант осуществления позволяет достигать преимуществ, описанных ниже.
[0040] (1) Система представляет собой систему для управления зарядкой каждого из множества автоматически управляемых транспортных средств 1, которые движутся по маршруту R с замкнутой траекторией без водителя с использованием аккумулятора B, смонтированного на них в качестве источника приведения в движение, и аккумулятор B которых заряжается в зарядной станции CS, установленной в предварительно определенной позиции по маршруту R с замкнутой траекторией. Система включает в себя модуль записи напряжения после зарядки (таблицу записанных данных) для записи напряжения после зарядки в зарядной станции CS для каждого из автоматически управляемых транспортных средств 1. Дополнительно, система включает в себя: модуль задания приоритета заряда (таблицу управления зарядным напряжением) для установления приоритета заряда каждого из автоматически управляемых транспортных средств 1 на основе значений напряжения для напряжений после зарядки, записанных в модуле записи напряжения после зарядки; и модуль задания целевых значений зарядки (таблицу управления зарядным напряжением) для установления целевого значения зарядки каждого из автоматически управляемых транспортных средств 1 на основе приоритетов заряда, установленных посредством модуля задания приоритета заряда.
[0041] А именно, система выполнена с возможностью устанавливать приоритет заряда для каждого из автоматически управляемых транспортных средств 1 на основе значений напряжения для напряжений после зарядки и устанавливать целевое значение зарядки каждого из автоматически управляемых транспортных средств 1 на основе приоритетов заряда. По этой причине, даже в случае, если множеству автоматически управляемых транспортных средств 1 инструктируют двигаться по маршруту R с замкнутой траекторией, можно восстанавливать емкость аккумулятора автоматически управляемого транспортного средства 1, емкость аккумулятора которого понижается, без разрегулировки цикла движения по замкнутой траектории и перемещения каждого из автоматически управляемых транспортных средств 1.
[0042] (2) Модуль задания приоритета заряда устанавливает более высокий приоритет заряда для автоматически управляемого транспортного средства, значение напряжения для напряжения после зарядки которого, записанное в модуле записи напряжения после зарядки, ниже приоритетного значения зарядного напряжения, установленного заранее, по сравнению с автоматически управляемым транспортным средством, значение напряжения для напряжения после зарядки которого, записанное в модуле записи напряжения после зарядки, выше приоритетного значения зарядного напряжения. А именно, приоритет заряда автоматически управляемого транспортного средства 1, напряжение после зарядки аккумулятора B которого является более низким, становится более высоким, а приоритет заряда автоматически управляемого транспортного средства 1, напряжение после зарядки аккумулятора B которого является более высоким, становится более низким. По этой причине, можно улучшать зарядку для автоматически управляемого транспортного средства 1, напряжение после зарядки аккумулятора B которого является более низким.
[0043] (3) Модуль задания целевых значений зарядки устанавливает целевое значение зарядки таким образом, что чем выше приоритет заряда, установленный посредством модуля задания приоритета заряда, тем большим становится время зарядки. А именно, время зарядки для автоматически управляемого транспортного средства 1, приоритет заряда которого устанавливается как высокий, становится большим, тогда как время зарядки для автоматически управляемого транспортного средства 1, приоритет заряда которого устанавливается как низкий, становится меньшим. По этой причине, можно восстанавливать емкость аккумулятора автоматически управляемого транспортного средства 1, емкость аккумулятора которого понижается, без разрегулировки цикла движения по замкнутой траектории и перемещения множества автоматически управляемых транспортных средств 1 по маршруту R с замкнутой траекторией.
[0044] (4) Автоматически управляемое транспортное средство 1 включает в себя монитор 11 зарядки/разрядки для мониторинга величины заряда/разряда аккумулятора B. Этот монитор 11 зарядки/разрядки выполнен с возможностью: отслеживать напряжения гальванических элементов множества аккумуляторных источников питания, которые составляют аккумулятор B; в случае, если напряжение гальванического элемента любого аккумуляторного источника питания уменьшается до значения напряжения ниже значения напряжения, установленного заранее, отображать тот факт, что аккумулятор B автоматически управляемого транспортного средства 1 находится в анормальном состоянии; и инструктировать автоматически управляемому транспортному средству 1 останавливаться. Дополнительно, в случае, если каждое из автоматически управляемых транспортных средств 1 движется в области, обращенной к сборочной станции BS на технологической линии, то значение напряжения, посредством которого определяется то, находится или нет аккумулятор B в анормальном состоянии, понижается по сравнению со случаем движения в другой области. По этой причине, можно исключать анормальную остановку автоматически управляемого транспортного средства 1 при прохождении через область сборочной станции BS.
[0045] Как описано выше, пояснен вариант осуществления настоящего изобретения. Тем не менее, вариант осуществления, описанный выше, показывает только часть примеров варианта применения настоящего изобретения, и объем настоящего изобретения не должен быть ограничен конкретными конфигурациями варианта осуществления, описанного выше.
[0046] Например, вариант осуществления, описанный выше, может быть комбинирован надлежащим образом.
[0047] Настоящая заявка испрашивает приоритет заявки на патент (Япония) № 2012-171717, поданной в Патентное ведомство Японии 2 августа 2012 года, содержимое которой явно содержится в данном документе по ссылке.
Реферат
Использование: в области электротехники. Технический результат - обеспечение времени зарядки в пределах цикла движения по замкнутой траектории для множества автоматически управляемых транспортных средств. Заявлена система для управления зарядкой каждого из множества автоматически управляемых транспортных средств, которые движутся по маршруту с замкнутой траекторией без водителя с использованием аккумулятора, смонтированного на них в качестве источника приведения в движение. При этом аккумулятор заряжается в зарядной станции, установленной в предварительно определенной позиции по маршруту с замкнутой траекторией. Система включает в себя: модуль записи напряжения после зарядки для записи напряжения после зарядки в зарядной станции для каждого из автоматически управляемых транспортных средств; модуль задания приоритета заряда для установления приоритета заряда каждого из автоматически управляемых транспортных средств на основе значений напряжения для напряжений после зарядки, записанных в модуле записи напряжения после зарядки; и модуль задания целевых значений зарядки для установления целевого значения зарядки каждого из автоматически управляемых транспортных средств на основе приоритетов заряда, установленных посредством модуля задания приоритета заряда. 3 з.п. ф-лы, 8 ил.
Формула
модуль записи напряжения после зарядки для записи напряжения после зарядки в зарядной станции для каждого из автоматически управляемых транспортных средств;
модуль задания приоритета заряда для установления приоритета заряда каждого из автоматически управляемых транспортных средств на основе значений напряжения для напряжений после зарядки, записанных в модуле записи напряжения после зарядки; и
модуль задания целевых значений зарядки для установления целевого значения зарядки каждого из автоматически управляемых транспортных средств на основе приоритетов заряда, установленных посредством модуля задания приоритета заряда.
при этом монитор заряда/разряда выполнен с возможностью: отслеживать напряжения множества гальванических элементов, которые составляют аккумулятор; в случае, если напряжение любого гальванического элемента уменьшается до напряжения ниже значения напряжения, установленного заранее, отображать тот факт, что аккумулятор автоматически управляемого транспортного средства находится в анормальном состоянии; и инструктировать автоматически управляемому транспортному средству останавливаться, и
при этом в случае, если каждое из автоматически управляемых транспортных средств движется в области, обращенной к сборочной станции на технологической линии, то значение напряжения, посредством которого определяется то, находится или нет аккумулятор в анормальном состоянии, понижается по сравнению со случаем движения в другой области.
Комментарии