Бесконтактное зарядное устройство - RU2545243C2
Код документа: RU2545243C2
Чертежи











Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к бесконтактному зарядному устройству.
[0002] Данная заявка испрашивает приоритет на основе заявки на патент (Япония) № 2010-290133, поданной 27 декабря 2010 года. Для указанных стран, которые разрешают включение документа по ссылке, содержимое, описанное в вышеупомянутой заявке, содержится по ссылке в данной заявке и выступает в качестве части описания данной заявки.
УРОВЕНЬ ТЕХНИКИ
[0003] Известна зарядная система (PTL 1), включающая в себя зарядное устройство, которое, когда транспортное средство остановлено в предварительно определенной позиции, заранее размещается около позиции остановки и заряжает аккумулятор, смонтированный на транспортном средстве; портативное устройство, которое носится водителем транспортного средства и имеет функцию связи; устройство связи на стороне транспортного средства, которое монтируется на транспортном средстве и осуществляет связь с портативным устройством; и модуль управления зарядкой аккумулятора, который монтируется на транспортном средстве, начинает зарядку для аккумулятора, если определяется то, что водитель отдаляется от транспортного средства, и завершает зарядку аккумулятора, если определяется то, что водитель приближается к транспортному средству, на основе результата связи устройства связи на стороне транспортного средства с портативным устройством. Зарядная система передает и принимает энергию через электромагнитную связь, в то время как бесконтактное состояние поддерживается между модулем приема энергии транспортного средства и модулем подачи энергии зарядного устройства.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0004] PTL 1. Публикация не прошедшей экспертизу заявки на патент (Япония) номер 2009-89452
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0005] Тем не менее, разрешение зарядки не оценивается на основе позиции модуля приема энергии и позиции модуля передачи энергии, и пользователь не может распознавать допуск по смещению позиции модуля передачи энергии относительно позиции модуля приема энергии. Эта конфигурация является неудобной для пользователя транспортного средства.
[0006] Задача, которая должна быть разрешена посредством настоящего изобретения, состоит в том, чтобы предоставлять бесконтактное зарядное устройство, которое повышает удобство для пользователя.
РЕШЕНИЕ ЗАДАЧИ
[0007] Настоящее изобретение разрешает вышеописанную задачу посредством включения средства определения состояния заряда для определения состояния заряда аккумулятора; и средства вычисления времени заряда для вычисления времени заряда аккумулятора в соответствии с состоянием заряда, определенным посредством средства определения состояния заряда и позицией катушки для передачи энергии.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0008] С помощью настоящего изобретения допустимый диапазон зарядки задается в соответствии с состоянием заряда, или время зарядки вычисляется в соответствии с состоянием заряда и позицией катушки для передачи энергии. Например, если состояние заряда является высоким, поскольку величина энергии, требуемая для зарядки, является небольшой, за счет задания широким допустимого диапазона зарядки может быть расширен диапазон для разрешения позиционного смещения катушки для передачи энергии. Согласно другому примеру, даже если время зарядки является длительным вследствие позиционного смещения катушки для передачи энергии, зарядка может начинаться посредством определения пользователя, который распознал время зарядки. Как результат, может быть повышено удобство для пользователя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Фиг. 1 является блок-схемой бесконтактной зарядной системы согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой контроллера аккумулятора и электронного модуля управления на фиг. 1.
Фиг. 3A предоставляет вид сверху и общий вид, показывающие состояние, в котором катушка для передачи энергии и катушка для приема энергии на фиг. 1 обращены друг к другу.
Фиг. 3B предоставляет вид сверху и общий вид, показывающие состояние, в котором катушка для передачи энергии и катушка для приема энергии на фиг. 1 обращены друг к другу и смещаются в направлении по оси X.
Фиг. 4 показывает характеристики энергии, которая может быть принята посредством катушки 1B для приема энергии в направлении по оси X (направлении по оси Y) и в направлении по оси Z, показанных на фиг. 3A и 3B.
Фиг. 5A является графиком, показывающим характеристики мощности зарядки аккумулятора 5 относительно времени зарядки на фиг. 1, и является графиком, показывающим характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки для приема энергии составляет 3,0 кВт.
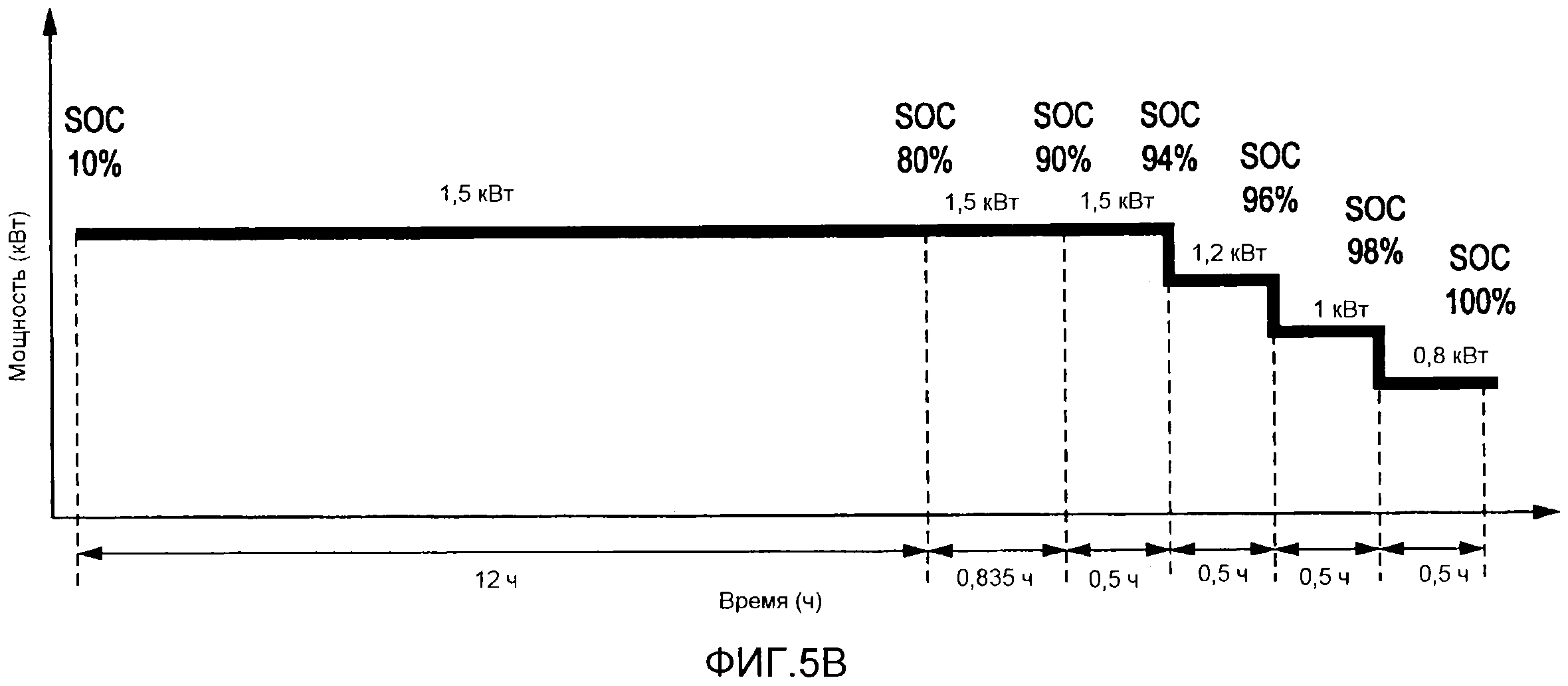
Фиг. 5B является графиком, показывающим характеристики мощности зарядки аккумулятора 5 относительно времени зарядки на фиг. 1, и является графиком, показывающим характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки для приема энергии составляет 1,5 кВт.
Фиг. 6A является графиком, показывающим характеристики мощности зарядки аккумулятора 5 относительно времени зарядки на фиг. 1, и является графиком, показывающим характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки для приема энергии составляет 3,0 кВт.
Фиг. 6B является графиком, показывающим характеристики мощности зарядки аккумулятора 5 относительно времени зарядки на фиг. 1, и является графиком, показывающим характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки для приема энергии составляет 1,5 кВт.
Фиг. 7 является иллюстрацией для пояснения допустимого диапазона зарядки, заданного посредством модуля задания допустимого диапазона зарядки на фиг. 2.
Фиг. 8 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы на фиг. 1.
Фиг. 9 является блок-схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно другому варианту осуществления настоящего изобретения.
Фиг. 10 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы на фиг. 9.
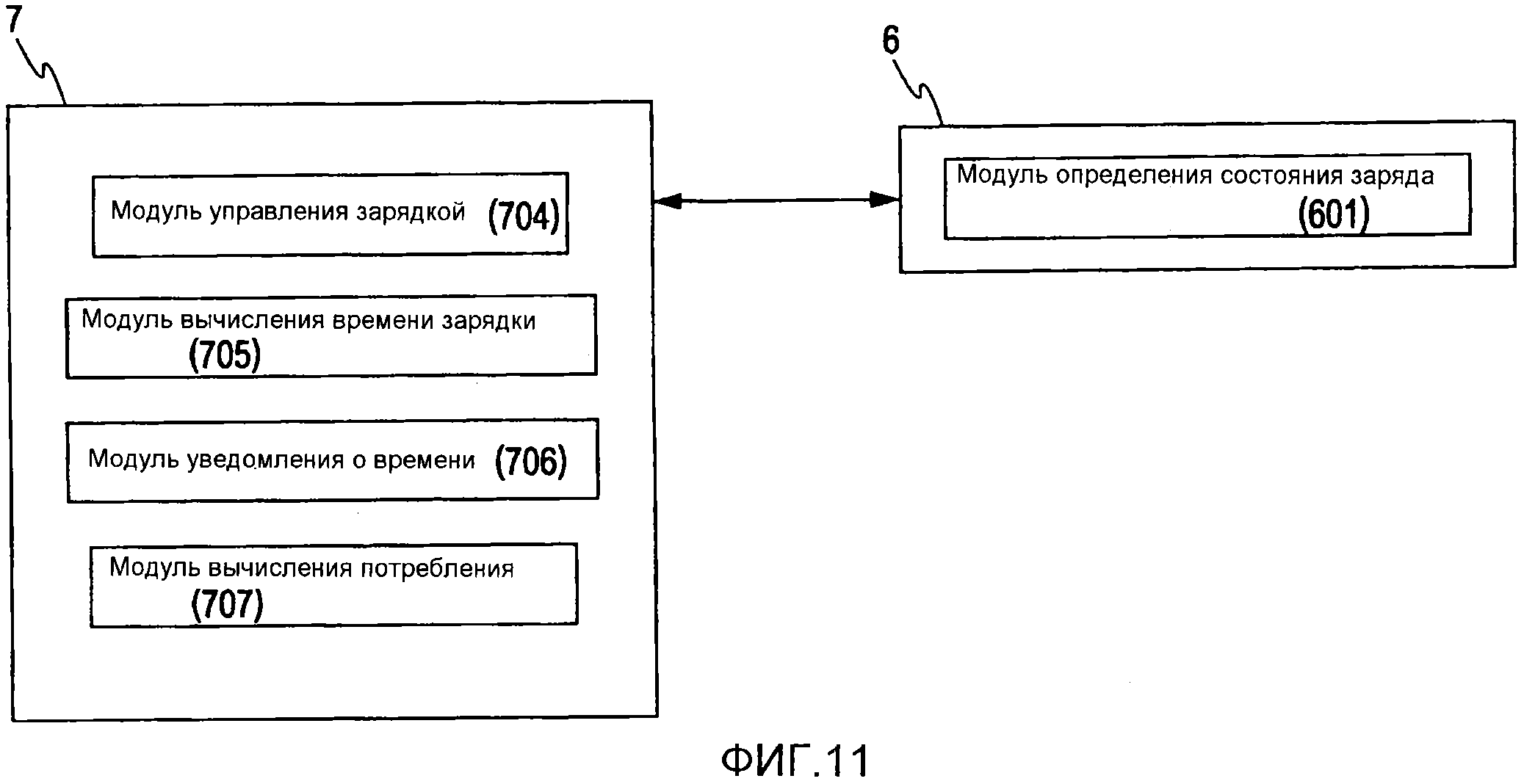
Фиг. 11 является блок-схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно еще одному другому варианту осуществления настоящего изобретения.
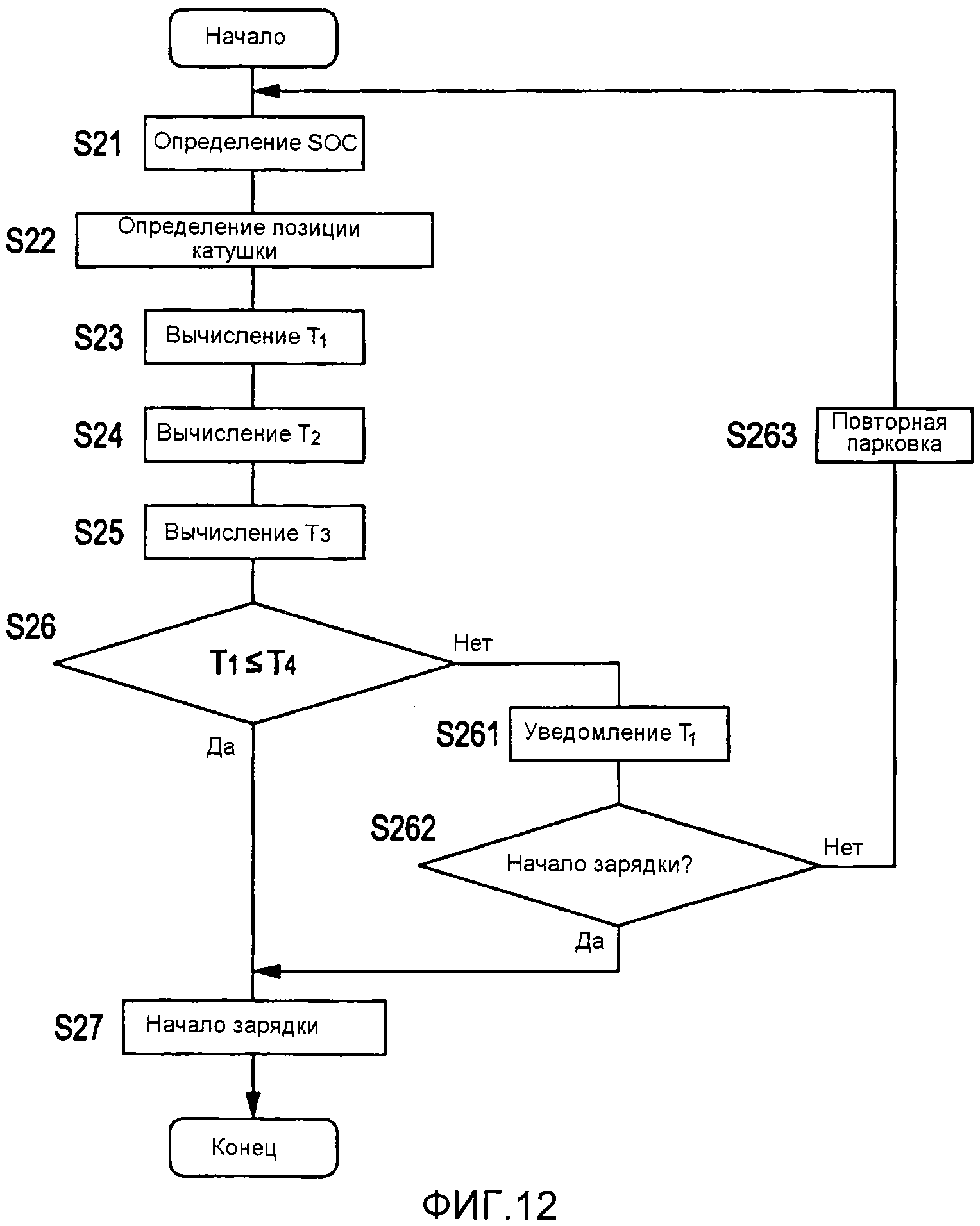
Фиг. 12 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы на фиг. 11.
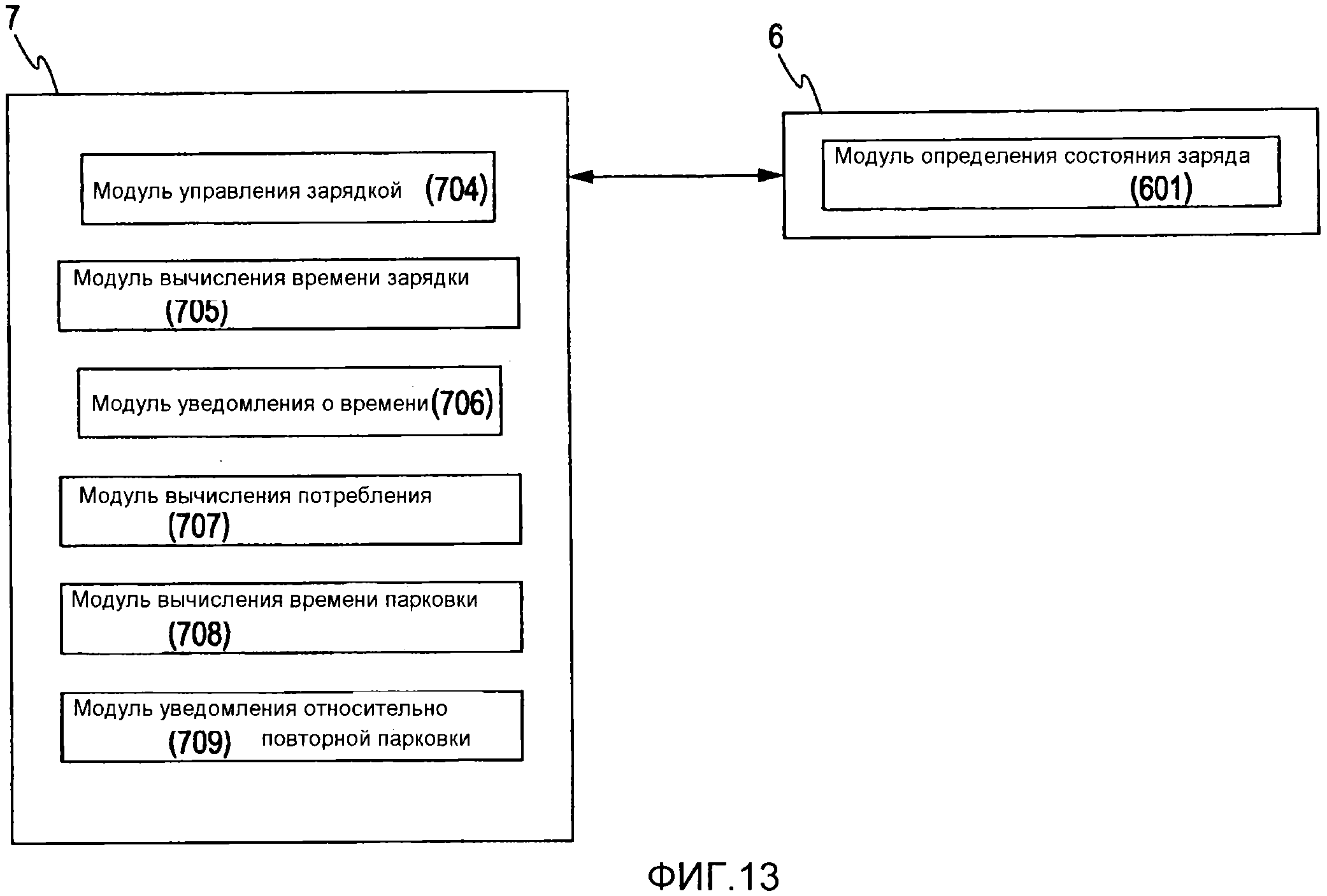
Фиг. 13 является блок-схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно еще одному другому варианту осуществления настоящего изобретения.
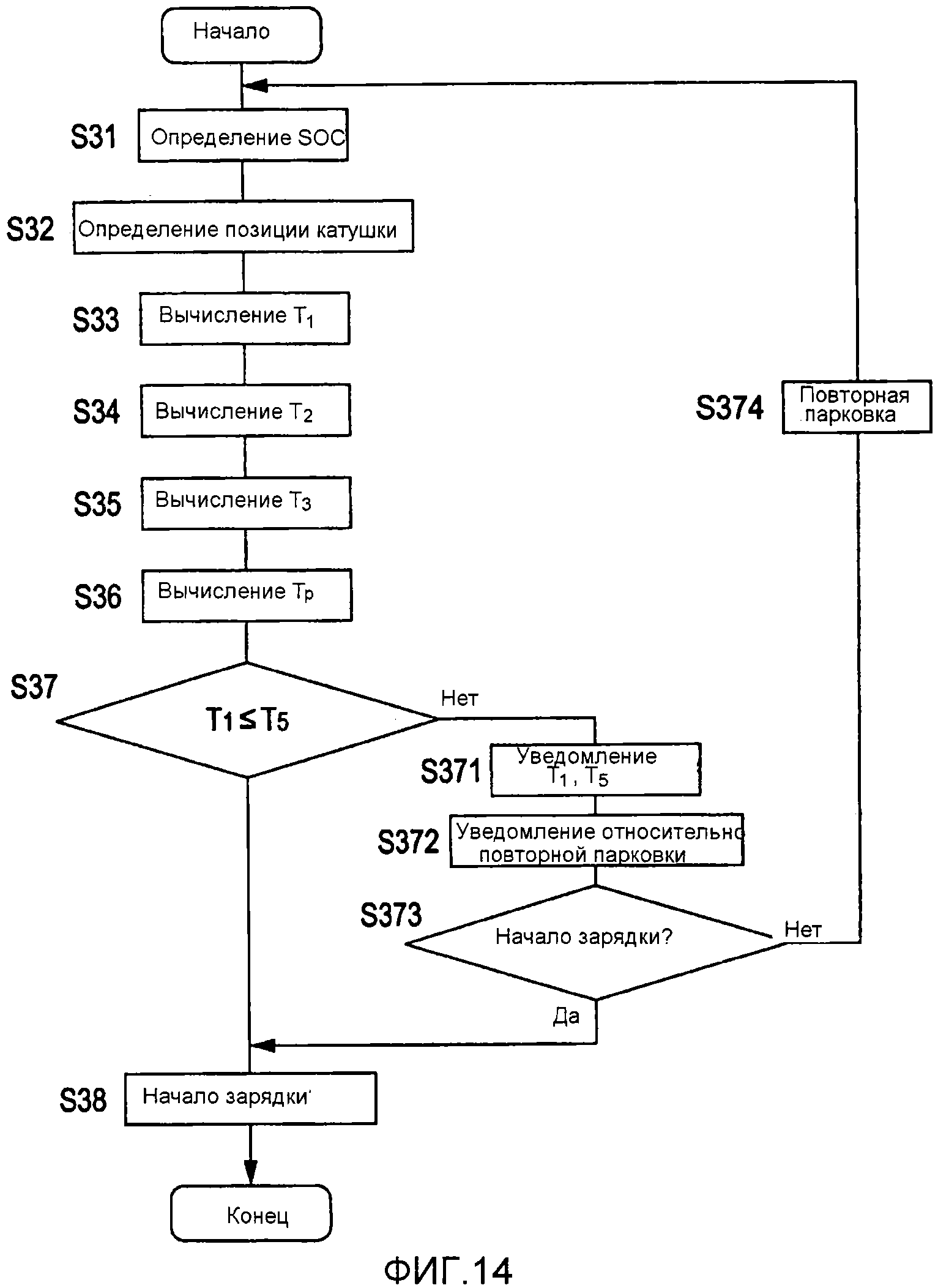
Фиг. 14 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы на фиг. 13.
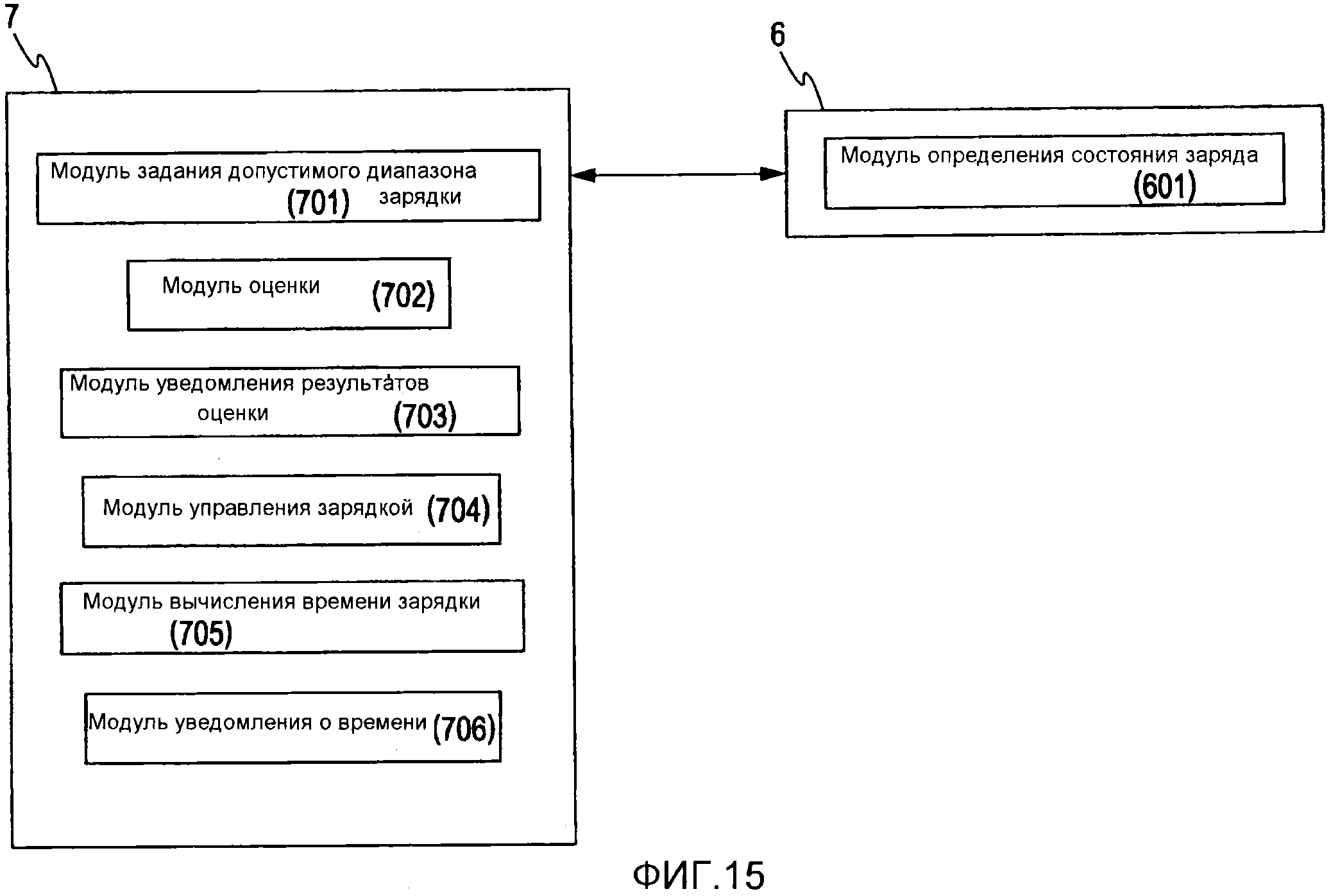
Фиг. 15 является блок-схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно дополнительному варианту осуществления настоящего изобретения.
Фиг. 16 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы на фиг. 15.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0010] В дальнейшем в этом документе со ссылкой на чертежи описываются бесконтактные зарядные устройства согласно вариантам осуществления настоящего изобретения.
[0011] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 является структурной схемой, показывающей бесконтактную зарядную систему, к которой применяется вариант осуществления настоящего изобретения. Система включает в себя модуль 100 на стороне земли и модуль 200 на стороне транспортного средства. Модуль 100 на стороне земли, установленный в стойке для подачи энергии и т.п., заряжает аккумулятор 5 посредством подачи энергии бесконтактным способом в нагрузку аккумулятора 5 и т.п. модуля 200 на стороне транспортного средства, смонтированного на транспортном средстве и т.п. В дальнейшем в этом варианте осуществления описывается то, что бесконтактное зарядное устройство, включающее в себя бесконтактную зарядную систему, монтируется на зарядной установке, предоставляемой в месте для парковки для транспортного средства или в электромобиле. Тем не менее, бесконтактное зарядное устройство, включающее в себя бесконтактную зарядную систему согласно этому варианту осуществления, может предоставляться на транспортном средстве, отличном от электромобиля, или может предоставляться в объекте, отличном от транспортного средства.
[0012] Модуль 100 на стороне земли включает в себя катушку 1A для передачи энергии, электрическую схему 2A на стороне земли, электронный модуль 3 управления (ECU), системный источник 4 питания и устройство 8A связи на стороне земли. Системный источник 4 питания подает энергию переменного тока в электрическую схему 2A на стороне земли. Электрическая схема 2A на стороне земли является схемой, включающей в себя выпрямитель, преобразователь энергии, резонансную схему и т.д., преобразует энергию переменного тока, передаваемую из системного источника 4 питания, в энергию переменного тока с переменной формой сигнала и передает энергию переменного тока с переменной формой сигнала в катушку 1A для передачи энергии. Катушка 1A для передачи энергии передает высокочастотную энергию в катушку 1B для приема энергии бесконтактным способом посредством эффекта электромагнитной индукции. Катушка 1A для передачи энергии предоставляется в месте для парковки на автомобильной парковке, содержащей бесконтактную зарядную систему согласно этому варианту осуществления. Когда транспортное средство, включающее в себя модуль 200 на стороне транспортного средства, паркуется в месте для парковки, катушка 1A для передачи энергии размещается ниже катушки 1B для приема энергии с расстоянием, поддерживаемым относительно катушки 1B для приема энергии. ECU 3 является контроллером, который полностью управляет модулем 100 на стороне земли. ECU 3 управляет электрической схемой 2A на стороне земли, например, начинает и завершает передачу энергии из катушки 1A для передачи энергии в катушку 1B для приема энергии и регулирует энергию, передаваемую из катушки 1A для передачи энергии. Устройство 8A связи на стороне земли осуществляет связь с устройством 8B связи на стороне транспортного средства и передает время передачи энергии, мощность передачи и т.д. в модуль 200 на стороне транспортного средства на основе управляющего сигнала ECU 3. Кроме того, устройство 8A связи на стороне земли передает позицию катушки 1A для передачи энергии в модуль 200 на стороне транспортного средства.
[0013] Модуль 200 на стороне транспортного средства включает в себя катушку 1B для приема энергии, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, электронный модуль 7 управления (ECU), контроллер 6 аккумулятора (BC) и устройство 8B связи на стороне транспортного средства. Катушка 1B для приема энергии является катушкой, которая принимает высокочастотную энергию, передаваемую из катушки 1A для передачи энергии бесконтактным способом посредством эффекта электромагнитной индукции, и которая устанавливается на нижней поверхности (в ходовой части) и т.п. транспортного средства, включающего в себя модуль 200 на стороне транспортного средства. Электрическая схема 2B на стороне транспортного средства является схемой, включающей в себя резонансную схему, выпрямитель, соединительный блок (J/B) и т.д., преобразует энергию, передаваемую из катушки 1B для приема энергии, подает энергию в аккумулятор 5 и заряжает аккумулятор 5. Иными словами, электрическая схема 2B на стороне транспортного средства имеет функцию зарядного устройства, которое заряжает аккумулятор 5. Аккумулятор 5 является аккумулятором, в котором подключаются множество аккумуляторных батарей, и является источником питания для транспортного средства, включающего в себя модуль 200 на стороне транспортного средства. BC 6 является контроллером, который управляет аккумулятором 5 и определяет состояние заряда (SOC: состояние заряда) аккумулятора 5, оставшуюся емкость аккумулятора 5 и т.д. ECU 7 является контроллером, который совместно управляет катушкой 1B для приема энергии, электрической схемой 2B на стороне транспортного средства и BC 6. ECU 7 управляет электрической схемой 2B и управляет зарядкой для аккумулятора 5 в соответствии с состоянием аккумулятора 5, управляемым посредством BC 6. Устройство 8B связи на стороне транспортного средства осуществляет связь с устройством 8A связи на стороне земли, принимает информацию позиции катушки 1A для передачи энергии, информацию касательно энергии, передаваемой из катушки 1A для передачи энергии и т.д., и передает принимаемую информацию в ECU 7.
[0014] Далее конфигурации BC 6 и ECU 7 описываются со ссылкой на фиг. 2. Фиг. 2 является структурной схемой, показывающей конфигурации BC 6 и ECU 7. BC 6 включает в себя модуль 601 определения состояния заряда. Модуль 601 определения состояния заряда определяет SOC аккумулятора 5. Поскольку SOC коррелируется с напряжением аккумулятора 5, модуль 601 определения состояния заряда может определять SOC аккумулятора 5 посредством определения напряжения аккумулятора 5. Информация касательно SOC аккумулятора 5, определенного посредством модуля 601 определения состояния заряда, передается в ECU 7.
[0015] ECU 7 включает в себя модуль 701 задания допустимого диапазона зарядки, модуль 702 оценки, модуль 703 уведомления результатов оценки и модуль 704 управления зарядкой. Модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки в соответствии с SOC, определенным посредством модуля 601 определения состояния заряда. Допустимый диапазон зарядки указывает диапазон позиции катушки 1A для передачи энергии для разрешения зарядки для аккумулятора 5 относительно позиции катушки 1B для приема энергии. Поскольку катушка 1A для передачи энергии предоставляется в модуле 100 на стороне земли, и катушка 1B для приема энергии предоставляется в модуле 200 на стороне транспортного средства, позиция катушки 1A для передачи энергии относительно катушки 1B для приема энергии варьируется в зависимости от припаркованной позиции транспортного средства. В этом варианте осуществления допустимый диапазон зарядки задается так, как описано ниже, в качестве критерия оценки для взаимного расположения между катушками для разрешения зарядки для аккумулятора 5, когда транспортное средство паркуется в месте для парковки.
[0016] Модуль 702 оценки определяет то, разрешается или нет зарядка для аккумулятора 5, в соответствии с позицией катушки 1A для передачи энергии относительно катушки 1B для приема энергии. Когда транспортное средство паркуется, если позиция катушки 1A для передачи энергии находится в пределах допустимого диапазона зарядки, зарядка разрешается, а если позиция катушки 1A для передачи энергии находится за пределами допустимого диапазона зарядки, зарядка не разрешается. Модуль 703 уведомления результатов оценки отображает результат оценки модуля 702 оценки, например, через навигационную систему (не показана), предоставляемую в приборной панели, либо речью.
[0017] Касательно зарядки для аккумулятора 5, мощность, подходящая для зарядки, заранее определяется в соответствии с SOC и снижается по мере того, как SOC приближается к полному заряду. BC 6 управляет SOC аккумулятора 5. BC 6 запрашивает мощность, требуемую для зарядки, в модуль 704 управления зарядкой на основе предварительно определенного способа зарядки. Модуль 704 управления зарядкой управляет выходной мощностью из электрической схемы 2B на стороне транспортного средства в аккумулятор 5, когда аккумулятор 5 заряжается в соответствии с мощностью, запрашиваемой посредством BC 6. Модуль 704 управления зарядкой снижает выходную мощность электрической схемы 2B на стороне транспортного средства и ограничивает мощность зарядки аккумулятора 5 ступенчато по мере того, как повышается SOC аккумулятора 5. Более конкретно, под управлением модуля 704 управления зарядкой зарядка для аккумулятора 5 посредством зарядного устройства электрической схемы 2B на стороне транспортного средства выполняется, например, посредством способа, в котором зарядка начинается посредством зарядки неизменяющимся током и затем переключается на зарядку многостадийным неизменяющимся током или на зарядку многостадийным неизменяющимся напряжением.
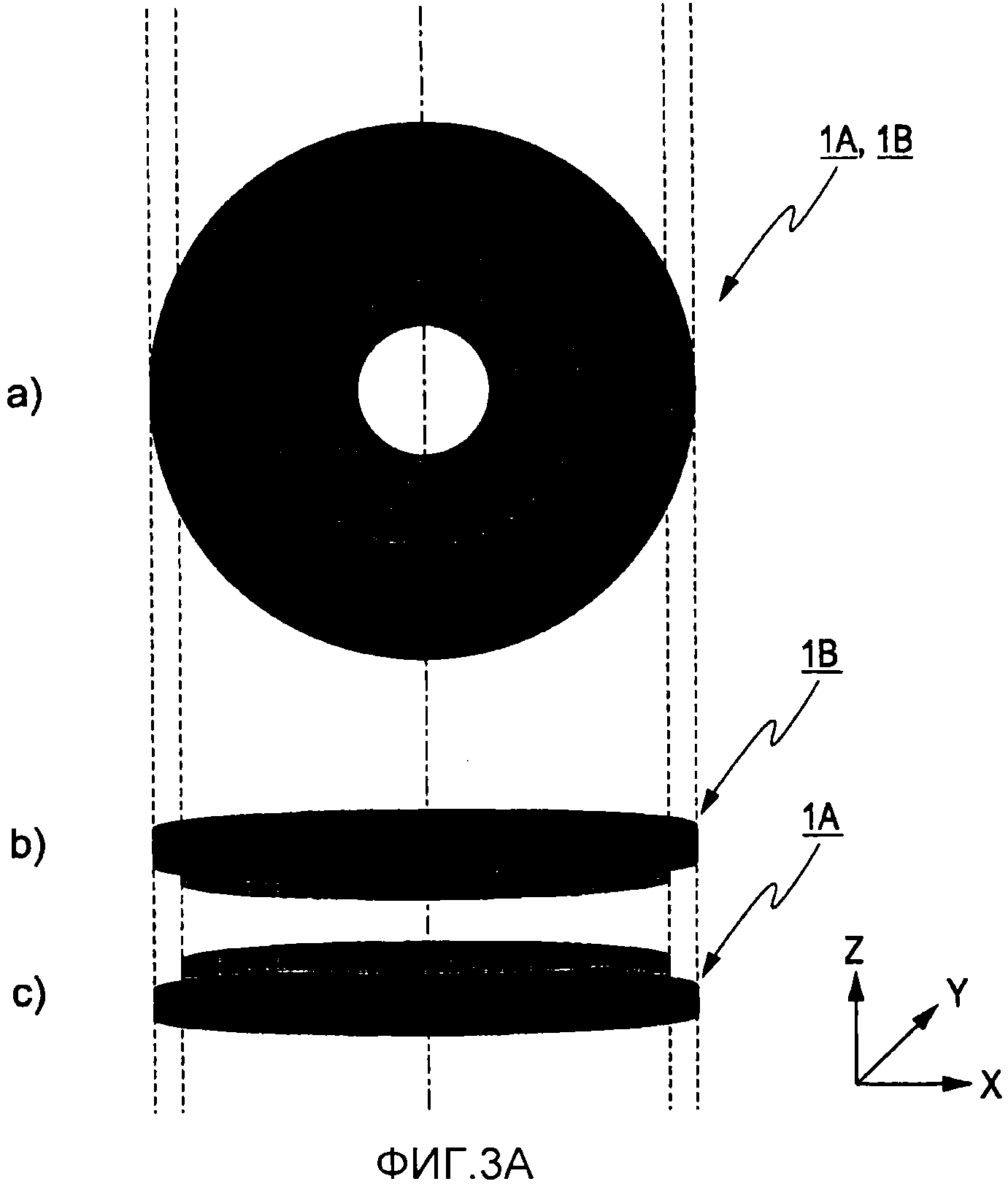
[0018] Далее со ссылкой на фиг. 3 и 4 описывается то, что энергия, принимаемая посредством катушки для приема энергии 1B, варьируется в зависимости от взаимного расположения между катушкой 1A для передачи энергии и катушкой 1B для приема энергии. Фиг. 3A и 3B являются видом сверху a) и общими видами b) и c), показывающими состояние, в котором катушка 1A для передачи энергии обращена к катушке 1B для приема энергии. На фиг. 3A и 3B ось X и ось Y указывают направление плоскости и направление по оси Z указывает направление высоты катушки 1A для передачи энергии и катушки 1B для приема энергии. Для описания предполагается, что катушка 1A для передачи энергии и катушка 1B для приема энергии имеют идентичную круглую форму. Тем не менее, в этом варианте осуществления катушка 1A для передачи энергии и катушка 1B для приема энергии не обязательно должны иметь круглую форму или не обязательно должны иметь идентичную форму.
[0019] Когда катушка 1A для передачи энергии устанавливается на земле и катушка 1B для приема энергии монтируется на транспортном средстве, как показано на фиг. 3A, предпочтительно, чтобы транспортное средство парковалось на автомобильной парковке, так что катушка 1B для приема энергии совмещается с катушкой 1A для передачи энергии в направлении по оси X и направлении по оси Y, которые представляют собой направление плоскости. Тем не менее, как показано на фиг. 3B, относительные позиции катушки 1A для передачи энергии и катушки 1B для приема энергии могут смещаться в направлении плоскости вследствие квалификации водителя. Кроме того, высота транспортного средства варьируется в зависимости от типа транспортного средства и величины нагрузки. Следовательно, расстояние между катушкой 1A для передачи энергии и катушкой 1B для приема энергии в направлении Z высоты варьируется вследствие высоты транспортного средства.
[0020] Когда энергия, которая должна подаваться из электрической схемы 2A на стороне земли в катушку 1A для передачи энергии, становится постоянной, эффективность энергии, принимаемой посредством катушки 1B для приема энергии, становится наибольшей, если катушка 1B для приема энергии совмещается с катушкой 1A для передачи энергии (согласно состоянию на фиг. 3A), и эффективность энергии снижается, если центральная точка катушки 1B для приема энергии находится на большом расстоянии от центральной точки катушки 1A для передачи энергии.
[0021] Фиг. 4 показывает характеристики энергии, которая может быть принята посредством катушки 1B для приема энергии в направлении по оси X (направлении по оси Y) и в направлении по оси Z, показанных на фиг. 3A и 3B. Предполагается, что энергия, которая должна подаваться из электрической схемы 2A на стороне земли в катушку 1A для передачи энергии, является постоянной. Как показано на фиг. 4, если позиции катушки 1A для передачи энергии и катушки 1B для приема энергии не изменяются и расстояние между катушкой 1A для передачи энергии и катушкой 1B для приема энергии увеличивается в направлении по оси Z, увеличивается интервал между катушкой 1A для передачи энергии и катушкой 1B для приема энергии и, следовательно, снижается мощность приема катушки 1B для приема энергии.
[0022] Катушка 1B для приема энергии крепится к транспортному средству. Расстояние между катушкой 1B для приема энергии и катушкой 1A для передачи энергии в направлении по оси Z заметно не изменяется относительно позиции для парковки транспортного средства и фиксируется на расстоянии (Z1) в направлении по оси Z. Когда расстояние в направлении по оси Z фиксируется на Z1, пунктирная линия на фиг. 4 указывает максимальную мощность, которая должна быть принята посредством катушки 1B для приема энергии. В направлении плоскости, если центральная точка катушки 1A для передачи энергии не смещается от центральной точки катушки 1B для приема энергии и катушка 1A для передачи энергии непосредственно обращена к катушке 1B для приема энергии (согласно фиг. 3A), максимальная мощность, которая должна быть принята посредством катушки 1B для приема энергии, становится равной 3,0 кВт (точка A на фиг. 4). Когда центральная точка катушки 1А для передачи энергии смещается от центральной точки катушки 1B для приема энергии в направлении по оси X (или направлении по оси Y) и расстояние между катушкой 1A для передачи энергии и катушкой 1B для приема энергии в направлении по оси X становится равным X1 (согласно фиг. 3B), максимальная мощность, которая должна быть принята посредством катушки 1B для приема энергии, снижается и становится равной 1,5 кВт (точка B на фиг. 4). Дополнительно, когда центральная точка катушки 1А для передачи энергии смещается от центральной точки катушки 1B для приема энергии в направлении по оси X (или направлении по оси Y), и расстояние между катушкой 1A для передачи энергии и катушкой 1B для приема энергии в направлении по оси X становится равным X2, мощность, которая должна быть принята посредством катушки 1B для приема энергии, дополнительно снижается и становится равной 1,0 кВт (точка C на фиг. 4).
[0023] Далее мощность приема катушки 1B для приема энергии и время зарядки аккумулятора 5 описываются со ссылкой на фиг. 5. Фиг. 5A и 5B являются графиками, показывающими характеристики мощности зарядки аккумулятора 5 относительно времени зарядки. Фиг. 5A показывает характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки 1B для приема энергии составляет 3,0 кВт. Фиг. 5B показывает характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки 1B для приема энергии составляет 1,5 кВт. Заряд начинается, когда SOC аккумулятора 5 составляет 10%, и заряд завершается, когда SOC аккумулятора 5 становится равным 100%. Свойства зарядки на фиг. 5A указывают свойства, когда взаимное расположение между катушками является таким, как показано на фиг. 3A, и зарядка выполняется с использованием мощности в точке A на фиг. 4. Свойства зарядки на фиг. 5B указывают свойства, когда взаимное расположение между катушками является таким, как показано на фиг. 3B, и зарядка выполняется с использованием мощности в точке B на фиг. 4.
[0024] Модуль 704 управления зарядкой заряжает аккумулятор 5 посредством задания мощности зарядки аккумулятора 5, равной 3,0 кВт, до тех пор, пока SOC аккумулятора 5 не становится 80%, снижения мощности зарядки аккумулятора 5 до 2,5 кВт, если SOC аккумулятора 5 становится 80%, снижения мощности зарядки аккумулятора 5 до 1,5 кВт, если SOC аккумулятора 5 становится 90%, снижения мощности зарядки аккумулятора 5 до 1,2 кВт, если SOC аккумулятора 5 становится 94%, снижения мощности зарядки аккумулятора 5 до 1,0 кВт, если SOC аккумулятора 5 становится 96%, и снижения мощности зарядки аккумулятора 5 до 0,8 кВт, если SOC аккумулятора 5 становится 98%.
[0025] Как показано на фиг. 5A, если зарядка начинается от момента, когда SOC составляет 10% в состоянии, в котором максимальная мощность приема катушки 1B для приема энергии составляет 3,0 кВт, модуль 704 управления зарядкой заряжает аккумулятор 5 посредством подачи максимальной мощности приема (3,0 кВт) катушки 1B для приема энергии в качестве мощности зарядки и снижает мощность зарядки ступенчато в соответствии с SOC при вышеописанном управлении зарядкой. Для времени зарядки время, требуемое для увеличения SOC с 10% до 80%, составляет 6 ч, время, требуемое для увеличения SOC с 80% до 90%, составляет 0,5 ч, время, требуемое для увеличения SOC с 90% до 94%, составляет 0,5 ч, время, требуемое для увеличения SOC с 94% до 96%, составляет 0,5 ч, время, требуемое для увеличения SOC с 96% до 98%, составляет 0,5 ч, и время, требуемое для увеличения SOC с 98% до 100%, составляет 0,5 ч. Следовательно, время зарядки, требуемое для зарядки аккумулятора 5 от момента, когда SOC составляет 10%, до полного заряда, составляет 8,5 ч (=6+0,5+0,5+0,5+0,5+0,5).
[0026] Напротив, как показано на фиг. 5B, если зарядка начинается от момента, когда SOC составляет 10% в состоянии, в котором максимальная мощность приема катушки 1B для приема энергии составляет 1,5 кВт, модуль 704 управления зарядкой заряжает аккумулятор 5 посредством подачи максимальной мощности приема (1,5 кВт) катушки 1B для приема энергии в качестве мощности зарядки в аккумулятор 5. Как описано выше, аккумулятор 5 согласно этому варианту осуществления может заряжаться с использованием мощности, эквивалентной или превышающей 1,5 кВт, до тех пор, пока SOC не становится 94%. Тем не менее, в состоянии позиций катушки, показанных на фиг. 3B, поскольку максимальная мощность, которая должна быть принята посредством катушки 1B для приема энергии, составляет 1,5 кВт, зарядка выполняется, в то время как мощность зарядки составляет 1,5 кВт до тех пор, пока SOC аккумулятора 5 не становится 94%, и снижает мощность зарядки ступенчато от момента, когда SOC аккумулятора 5 достигает 94%, способом, аналогичным вышеописанному способу.
[0027] Для времени зарядки время, требуемое для увеличения SOC с 10% до 80%, составляет 12 ч, время, требуемое для увеличения SOC с 80% до 90%, составляет 0,835 ч, время, требуемое для увеличения SOC с 90% до 94%, составляет 0,5 ч, время, требуемое для увеличения SOC с 94% до 96%, составляет 0,5 ч, время, требуемое для увеличения SOC с 96% до 98%, составляет 0,5 ч, и время, требуемое для увеличения SOC с 98% до 100%, составляет 0,5 ч. Т.е. время зарядки, требуемое для зарядки аккумулятора 5 от момента, когда SOC составляет 10%, до полного заряда, составляет 14,835 ч (=12+0,835+0,5+0,5+0,5+0,5).
[0028] Иными словами, в состоянии позиций катушек, показанных на фиг. 3B, по сравнению с состоянием позиций катушек, показанных на фиг. 3A, максимальная мощность, которая должна быть принята посредством катушки 1B для приема энергии, является низкой, и, следовательно, время зарядки для зарядки от момента, когда SOC составляет 10%, до полного заряда, является длительным.
[0029] Далее мощность приема катушки 1B для приема энергии и время зарядки аккумулятора 5 описываются со ссылкой на фиг. 6. Фиг. 6 отличается от фиг. 5 тем, что зарядка начинается, когда SOC составляет 90%. Фиг. 6A и 6B являются графиками, показывающими характеристики мощности зарядки аккумулятора 5 относительно времени зарядки. Фиг. 6A показывает характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки 1B для приема энергии составляет 3,0 кВт. Фиг. 6B показывает характеристики, когда зарядка выполняется в состоянии, в котором мощность приема катушки 1B для приема энергии составляет 1,5 кВт. Свойства зарядки на фиг. 6A указывают свойства, когда взаимное расположение между катушками является таким, как показано на фиг. 3A, и зарядка выполняется с использованием мощности в точке A на фиг. 4. Свойства зарядки на фиг. 6B указывают свойства, когда взаимное расположение между катушками является таким, как показано на фиг. 3B, и зарядка выполняется с использованием мощности в точке B на фиг. 4.
[0030] В примере, показанном на фиг. 6, зарядка выполняется от момента, когда SOC аккумулятора 5 составляет 90%. Следовательно, модуль 704 управления зарядкой заряжает аккумулятор 5 посредством задания мощности зарядки аккумулятора 5, равной 1,5 кВт, до тех пор, пока SOC аккумулятора 5 не становится 94%, снижения мощности зарядки аккумулятора 5 до 1,2 кВт, если SOC аккумулятора 5 становится 94%, снижения мощности зарядки аккумулятора 5 до 1,0 кВт, если SOC аккумулятора 5 становится 96%, снижения мощности зарядки аккумулятора 5 до 0,8 кВт, если SOC аккумулятора 5 становится 98%.
[0031] Как показано на фиг. 6A, если зарядка начинается от момента, когда SOC составляет 90% в состоянии, в котором максимальная мощность приема катушки 1B для приема энергии составляет 3,0 кВт, модуль 704 управления зарядкой заряжает аккумулятор 5 посредством снижения максимальной мощности приема (3,0 кВт) катушки 1B для приема энергии до мощности зарядки (1,5 кВт) и подачи мощности зарядки и снижает мощность зарядки ступенчато в соответствии с SOC при вышеописанном управлении зарядкой. Для времени зарядки время, требуемое для увеличения SOC с 90% до 94%, составляет 0,5 ч, время, требуемое для увеличения SOC с 94% до 96%, составляет 0,5 ч, время, требуемое для увеличения SOC с 96% до 98%, составляет 0,5 ч, и время, требуемое для увеличения SOC с 98% до 100%, составляет 0,5 ч. Следовательно, время зарядки, требуемое для зарядки аккумулятора 5 от момента, когда SOC составляет 90%, до полного заряда, составляет 2,0 ч (=0,5+0,5+0,5+0,5).
[0032] Напротив, как показано на фиг. 6B, если зарядка начинается от момента, когда SOC составляет 90% в состоянии, в котором максимальная мощность приема катушки 1B для приема энергии составляет 1,5 кВт, модуль 704 управления зарядкой заряжает аккумулятор 5 посредством подачи максимальной мощности приема (1,5 кВт) катушки 1B для приема энергии в качестве мощности зарядки и снижает мощность зарядки ступенчато в соответствии с SOC при вышеописанном управлении зарядкой. Для времени зарядки, время, требуемое для увеличения SOC с 90% до 94%, составляет 0,5 ч, время, требуемое для увеличения SOC с 94% до 96%, составляет 0,5 ч, время, требуемое для увеличения SOC с 96% до 98%, составляет 0,5 ч, и время, требуемое для увеличения SOC с 98% до 100%, составляет 0,5 ч. Следовательно, время зарядки, требуемое для зарядки аккумулятора 5 от момента, когда SOC составляет 90%, до полного заряда, составляет 2,0 ч (=0,5+0,5+0,5+0,5).
[0033] В состоянии позиций катушек, показанных на фиг. 3B, по сравнению с состоянием позиций катушек, показанных на фиг. 3A, снижается максимальная мощность, которая должна быть принята посредством катушки 1B для приема энергии. Тем не менее, поскольку максимальная мощность приема катушки 1B для приема энергии равна или выше максимальной мощности зарядки, когда зарядка для аккумулятора 5 начинается, даже если возникает позиционное смещение катушки, как показано на фиг. 3B, время зарядки не изменяется.
[0034] Иными словами, если SOC становится близким к полному заряду, как показано на фиг. 5 и 6, мощность, требуемая для зарядки, может быть низкой. Следовательно, когда SOC является близким к полному состоянию, может разрешаться позиционное смещение катушки.
[0035] Далее содержимое управления бесконтактной зарядной системы согласно этому варианту осуществления, описывается со ссылкой на фиг. 2 и 7. Фиг. 7 является схематичной иллюстрацией для пояснения допустимого диапазона зарядки и соответствует виду сверху катушки 1B для приема энергии.
[0036] Бесконтактная зарядная система согласно этому варианту осуществления работает, когда транспортное средство паркуется в месте для парковки, включающем в себя модуль 100 на стороне земли. Во-первых, модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию касательно определенного SOC в ECU 7. Затем модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки следующим образом в соответствии с SOC аккумулятора 5. Модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки вдоль направления главной плоскости катушки 1A для передачи энергии или катушки 1B для приема энергии. Допустимый диапазон зарядки является мнимым круговым диапазоном вокруг катушки 1B для приема энергии, служащей в качестве центра, и является диапазоном для определения того, что зарядка разрешается, если катушка 1A для передачи энергии находится в пределах допустимого диапазона зарядки. Кроме того, допустимый диапазон зарядки задается таким образом, что заряд завершается в пределах заранее предполагаемого времени зарядки. Как показано на фиг. 5B, если позиционное смещение между катушкой 1A для передачи энергии и катушкой 1B для приема энергии является большим, аккумулятор 5 может быть заряжен при условии, что катушка 1B для приема энергии может принимать энергию. Тем не менее, если аккумулятор 5 заряжается от момента, когда SOC является низким, до полного заряда, время зарядки может быть длительным. Вследствие этого допустимый диапазон зарядки задает допустимое позиционное смещение катушки в области в горизонтальном направлении (направлении, параллельном месту для парковки) в соответствии с SOC аккумулятора 5 таким образом, что заряд завершается в пределах заранее предполагаемого времени.
[0037] Более конкретно, как показано на фиг. 7, модуль 701 задания допустимого диапазона зарядки задает область (a) в качестве допустимого диапазона зарядки, если SOC аккумулятора 5 составляет 0% или выше и ниже 80%, задает область (b) в качестве допустимого диапазона зарядки, если SOC аккумулятора 5 составляет 80% или выше и ниже 90%, и задает область (с) в качестве допустимого диапазона зарядки, если SOC аккумулятора 5 составляет 90% или выше. Иными словами, модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки большим по мере того, как повышается SOC. Следовательно, допустимое позиционное смещение катушки становится большим по мере того, как повышается SOC.
[0038] Когда модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки, ECU 7 использует навигационное устройство и систему содействия при парковке с камерой на транспортном средстве (не показана), так что допустимый диапазон зарядки отображается на дисплее навигационного устройства. Водитель транспортного средства совмещает позицию для парковки в ходе просмотра дисплея таким образом, что позиция катушки 1A для передачи энергии находится в пределах допустимого диапазона зарядки. Соответственно, водитель может парковать транспортное средство в позиции, подходящей для зарядки.
[0039] Затем, после парковки, ECU 7 определяет позицию катушки 1A для передачи энергии через устройства 8A и 8B связи. В этом варианте осуществления позиция катушки 1A для передачи энергии определяется через связь, осуществляемую посредством устройства 8A связи на стороне земли и устройства 8B связи на стороне транспортного средства. Тем не менее, позиция катушки 1A для передачи энергии может быть определена посредством предоставления, например, датчика позиции в катушке 1A для передачи энергии или катушке 1B для приема энергии. Альтернативно, антенна для передачи сигналов может предоставляться в модуле 100 на стороне земли, приемное устройство может предоставляться в модуле 200 на стороне транспортного средства, и позиция катушки может быть определена из состояния связи сигнала, передаваемого из антенны.
[0040] Когда позиция катушки 1A для передачи энергии определяется через устройства 8A и 8B связи, модуль 702 оценки определяет то, находится или нет позиция катушки для передачи энергии в пределах допустимого диапазона зарядки. Затем, если позиция катушки для передачи энергии находится в пределах допустимого диапазона зарядки, модуль 702 оценки определяет то, что аккумулятор 5 может быть заряжен. Если модуль 702 оценки определяет то, что зарядка разрешается, модуль 704 управления зарядкой управляет мощностью приема катушки 1B для приема энергии как мощностью зарядки, подходящей для зарядки для аккумулятора 5, в соответствии с SOC, определенным посредством модуля 601 определения состояния заряда, и подает мощность зарядки в аккумулятор 5. Иными словами, если мощность приема катушки 1B для приема энергии выше мощности зарядки, подходящей для зарядки, модуль 704 управления зарядкой снижает мощность приема и подает мощность зарядки, подходящую для зарядки, в аккумулятор 5. Напротив, если мощность приема катушки 1B для приема энергии ниже мощности зарядки, подходящей для зарядки, модуль 704 управления зарядкой подает мощность приема катушки 1B для приема энергии в качестве мощности зарядки в аккумулятор 5. Если модуль 702 оценки определяет то, что зарядка не разрешается, модуль 703 уведомления результатов оценки может выдавать уведомление относительно результата оценки и уведомлять водителя относительно предложения повторной парковки.
[0041] Модуль 601 определения состояния заряда определяет SOC даже в ходе зарядки для аккумулятора 5, и модуль 704 управления зарядкой снижает мощность зарядки ступенчато по мере того, как увеличивается SOC. Затем, когда аккумулятор 5 полностью заряжен, модуль 704 управления зарядкой завершает подачу энергии в аккумулятор 5. Соответственно, в бесконтактной зарядной системе в варианте осуществления заряжается аккумулятор 5.
[0042] Далее, управляющая процедура бесконтактной зарядной системы согласно этому варианту осуществления описывается со ссылкой на фиг. 8. Фиг. 8 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы согласно этому варианту осуществления. Когда управление посредством бесконтактной зарядной системы согласно этому варианту осуществления начинается, на этапе S1, модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию определенного SOC в ECU 7. На этапе S2 модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки в соответствии с определенным SOC. На этапе S3 ECU 7 определяет позицию катушки передачи 1A через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. В бесконтактной зарядной системе согласно этому варианту осуществления, например, когда транспортное средство приближается к месту для парковки или когда транспортное средство начинает парковаться в месте для парковки, устройство 8A связи на стороне земли может начинать осуществлять связь с устройством 8B связи на стороне транспортного средства, и может быть определена позиция катушки передачи 1A.
[0043] На этапе S4 модуль 702 оценки определяет то, находится или нет позиция катушки 1A для передачи энергии в пределах допустимого диапазона зарядки. Если позиция катушки 1A для передачи энергии не находится в пределах допустимого диапазона зарядки, модуль 702 оценки не разрешает заряд. На этапе S41 модуль 703 уведомления результатов оценки уведомляет пассажира относительно результата определения, указывающего то, что зарядка не разрешается, посредством предоставления отображения для предложения пассажиру выполнять повторную парковку, и затем обработка возвращается к этапу S1. Если позиция катушки 1A для передачи энергии находится в пределах допустимого диапазона зарядки, модуль 702 оценки разрешает зарядку, и обработка переходит к этапу S5.
[0044] На этапе S5 модуль 704 управления зарядкой начинает зарядку для аккумулятора посредством задания мощности зарядки в соответствии с SOC аккумулятора 5 и мощностью приема катушки 1B для приема энергии и подачи мощности зарядки в аккумулятор 5. Кроме того, модуль 703 уведомления результатов оценки уведомляет пассажира относительно результата оценки для разрешения зарядки посредством уведомления пассажира относительно начала зарядки. Затем, когда SOC аккумулятора 5 становится полным зарядом, завершается управление посредством бесконтактной зарядной системы согласно этому варианту осуществления.
[0045] Как описано выше, бесконтактное зарядное устройство согласно этому варианту осуществления включает в себя катушку 1B для приема энергии, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, модуль 601 определения состояния заряда и модуль 701 задания допустимого диапазона зарядки и задает допустимый диапазон зарядки, который указывает диапазон позиции катушки 1A для передачи энергии для разрешения зарядки для аккумулятора, относительно позиции катушки 1B для приема энергии, в соответствии с SOC. Позиционное смещение между катушкой 1B для приема энергии и катушкой 1A для передачи энергии, допустимое для зарядки аккумулятора 5, варьируется в зависимости от SOC аккумулятора 5. В этом варианте осуществления, поскольку допустимый диапазон зарядки задается в соответствии с SOC, может быть определен диапазон для разрешения позиционного смещения. Если позиционное смещение катушки находится за пределами допустимого диапазона зарядки, водитель может парковать транспортное средство таким образом, что позиционное смещение катушки находится в пределах допустимого диапазона зарядки, и, следовательно, может быть повышено удобство для пользователя. Кроме того, в этом варианте осуществления, например, если система содействия при парковке в навигационном устройстве используется для того, чтобы отображать допустимый диапазон зарядки на дисплее навигационного устройства, когда водитель паркует транспортное средство в ходе просмотра допустимого диапазона зарядки, позиция катушки 1B для приема энергии может совмещаться относительно катушки передачи энергии 1A в диапазоне для разрешения зарядки для аккумулятора 5. Как результат, бесконтактное зарядное устройство согласно этому варианту осуществления может повышать удобство для пользователя.
[0046] Кроме того, в этом варианте осуществления модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки большим по мере того, как повышается SOC. Мощность зарядки, подходящая для зарядки аккумулятора 5 с высоким SOC, ниже мощности зарядки аккумулятора 5 с низким SOC. Вследствие этого, если SOC является высоким, мощность приема катушки 1B для приема энергии может быть низкой, и увеличивается диапазон для разрешения позиционного смещения катушки. В этом варианте осуществления, поскольку допустимый диапазон зарядки задается как становящийся большим по мере того, как повышается SOC, диапазон позиционного смещения катушки для разрешения зарядки может задаваться в соответствии с SOC, и как результат может быть повышено удобство для пользователя.
[0047] Кроме того, в этом варианте осуществления включены устройства 8A и 8B связи, которые определяют позицию катушки для передачи энергии, модуль 702 оценки и модуль 703 уведомления результатов оценки, который выдает уведомление относительно результата оценки модуля 702 оценки, и если позиция катушки для передачи энергии находится в пределах допустимого диапазона зарядки, модуль 702 оценки определяет то, что разрешается зарядка аккумулятора 5. Соответственно, пассажир просматривает результат оценки, уведомленный посредством модуля 703 уведомления результатов оценки, и, следовательно, пассажир может распознавать, доступна или нет зарядка в текущем состоянии парковки. Кроме того, если транспортное средство паркуется в состоянии, не подходящем для зарядки, поскольку позиционное смещение катушки является большим, пассажир может распознавать состояние через уведомление из модуля 703 уведомления результатов оценки. Как результат, этот вариант осуществления может повышать удобство для пользователя. Кроме того, если транспортное средство паркуется в состоянии, не подходящем для зарядки, поскольку позиционное смещение катушки является большим, энергия, принимаемая посредством катушки 1B для приема энергии, является низкой, и, следовательно, аккумулятор 5 не может быть заряжен до полного заряда или время зарядки для зарядки аккумулятора 5 до полного заряда может быть длительным. В этом варианте осуществления, если транспортное средство находится в состоянии, не подходящем для зарядки, поскольку позиционное смещение катушки является большим, пассажир может распознавать состояние, не подходящее для зарядки, через уведомление посредством модуля 703 уведомления результатов оценки. Соответственно, пассажир может повторно парковать транспортное средство таким образом, что состояние становится подходящим для зарядки. Как результат может быть сокращено время зарядки.
[0048] В этом варианте осуществления допустимый диапазон зарядки является круговым; тем не менее, допустимый диапазон зарядки не должен быть круговым и может быть прямоугольным. Кроме того, в этом варианте осуществления допустимый диапазон зарядки является двумерной плоскостью; тем не менее, допустимый диапазон зарядки может быть трехмерной областью.
[0049] Кроме того, в этом варианте осуществления, поскольку допустимый диапазон зарядки задается как становящийся большим по мере того, как повышается SOC, как показано на фиг. 7, задается множество допустимых диапазонов зарядки, тогда как SOC (80%) и SOC (90%) служат в качестве границ. Тем не менее, границы не обязательно должны составлять SOC (80%) и SOC (90%), и допустимый диапазон зарядки может непрерывно изменяться в соответствии с SOC.
[0050] Кроме того, в этом варианте осуществления часть управления системы на стороне транспортного средства разделяется на BC 6 и ECU 7. Тем не менее, BC 6 и ECU 7 могут представлять собой один контроллер.
[0051] Кроме того, допустимый диапазон зарядки заранее задается таким образом, что заряд завершается в пределах заранее предполагаемого времени зарядки. Тем не менее, размер допустимого диапазона зарядки может задаваться в соответствии со временем зарядки, запрашиваемым пассажиром. Например, если водитель паркует транспортное средство и имеет время до следующего приведения в движение, время зарядки может быть длительным. Кроме того, если время зарядки может быть длительным, как показано на фиг. 5 и 6, мощность приема катушки 1B для приема энергии может быть низкой и, следовательно, допустимый диапазон зарядки может быть большим. Иными словами, пассажир задает требуемое время зарядки. Модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки большим, если время зарядки является длительным, и задает допустимый диапазон зарядки небольшим, если время зарядки является коротким. Соответственно, в этом варианте осуществления диапазон для разрешения позиционного смещения катушки может задаваться в соответствии со временем зарядки, запрашиваемым пассажиром, и SOC, и, следовательно, может быть повышено удобство для пользователя.
[0052] В этом варианте осуществления электрическая схема 2B на стороне транспортного средства может включать в себя схему определения температуры, к примеру терморезистор, и может определять температуру аккумулятора 5, и модуль 701 задания допустимого диапазона зарядки может задавать допустимый диапазон зарядки в соответствии с температурой определения аккумулятора 5. Кроме того, электрическая схема 2B на стороне транспортного средства может включать в себя схему определения температуры, к примеру терморезистор, и может определять температуру внутренней части транспортного средства, и модуль 701 задания допустимого диапазона зарядки может задавать допустимый диапазон зарядки в соответствии с температурой определения внутри транспортного средства. Соответственно, допуск для зарядки может быть надлежащим образом определен в соответствии с температурой аккумулятора 5 или бортовой температурой, и, следовательно, может быть повышено удобство для пользователя.
[0053] Катушка 1B для приема энергии и электрическая схема 2B на стороне транспортного средства соответствуют "устройству приема энергии" согласно настоящему изобретению, модуль 601 определения состояния заряда соответствует "средству определения состояния заряда", модуль 701 задания допустимого диапазона зарядки соответствует "средству задания допустимого диапазона зарядки", модуль 702 оценки соответствует "средству оценки", модуль 703 уведомления результатов оценки соответствует "средству уведомления результатов оценки", устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства соответствуют "средству определения позиции", модуль 704 управления зарядкой соответствует "средству управления зарядкой", и схема определения температуры, включенная в электрическую схему 2B на стороне транспортного средства, соответствует "средству определения температуры".
[0054] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 9 является структурной схемой, показывающей бесконтактную зарядную систему согласно другому варианту осуществления настоящего изобретения. Этот вариант осуществления отличается от вышеописанного первого варианта осуществления тем, что предоставляются модуль 705 вычисления времени зарядки и модуль 706 уведомления о времени. Конфигурация, за исключением этих модулей, является аналогичной конфигурации первого варианта осуществления, и описание включается при необходимости.
[0055] Как показано на фиг. 9, ECU 7 включает в себя модуль 704 управления зарядкой, модуль 705 вычисления времени зарядки и модуль 706 уведомления о времени. Модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки для зарядки аккумулятора 5 в соответствии с SOC, определенным посредством модуля 601 определения состояния заряда, и позицией катушки для передачи энергии относительно позиции катушки 1B для приема энергии. Как показано на фиг. 4, мощность приема катушки 1B для приема энергии варьируется в зависимости от степени позиционного смещения катушки 1B для приема энергии относительно катушки 1A для передачи энергии. Следовательно, если определяется степень позиционного смещения катушки 1B для приема энергии относительно катушки 1A для передачи энергии, получается мощность приема катушки 1B для приема энергии. Как показано на фиг. 5 и 6, если получается мощность приема катушки 1B для приема энергии и текущее SOC аккумулятора 5, вычисляется время зарядки аккумулятора 5.
[0056] В этом варианте осуществления сначала, когда транспортное средство паркуется в предварительно определенном месте для парковки, ECU 7 определяет позицию катушки 1A для передачи энергии через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. Модуль 601 определения состояния заряда определяет SOC аккумулятора 5. Модуль 705 вычисления времени зарядки вычисляет степень позиционного смещения катушки на основе позиции катушки 1A для передачи энергии относительно катушки 1B для приема энергии. Затем модуль 705 вычисления времени зарядки вычисляет мощность приема катушки 1B для приема энергии на основе степени позиционного смещения катушки. Для мощности приема катушки 1B для приема энергии ECU 7 сохраняет карту, как показано на фиг. 4, и вычисляет мощность приема катушки 1B для приема энергии посредством обращения к карте на предмет определенной позиции катушки 1A для передачи энергии.
[0057] В модуле 100 на стороне земли, если выходная мощность из катушки 1A для передачи энергии в катушку 1B для приема энергии является фиксированной, модуль 705 вычисления времени зарядки может вычислять мощность приема катушки 1B для приема энергии посредством вычисления процентного отношения мощности, которая должна быть принята посредством катушки 1B для приема энергии, из заранее зафиксированной выходной мощности, в соответствии со степенью позиционного смещения катушки. Напротив, в модуле 100 на стороне земли, если варьируется выходная мощность из катушки 1A для передачи энергии в катушку 1B для приема энергии, ECU 7 определяет выходную мощность катушки 1A для передачи энергии, заданную посредством ECU 3, через устройства 8A и 8B связи. Затем модуль 705 вычисления времени зарядки может вычислять мощность приема катушки 1B для приема энергии посредством вычисления процентного отношения мощности, которая должна быть принята посредством катушки 1B для приема энергии, из определенной выходной мощности, в соответствии со степенью позиционного смещения катушки.
[0058] Затем модуль 704 управления зарядкой задает мощность зарядки аккумулятора 5 из мощности зарядки, запрашиваемой на основе BC 6, и мощности приема катушки 1B для приема энергии. Модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки от текущего SOC до полного заряда при способе зарядки модуля 704 управления зарядкой из мощности зарядки, заданной посредством модуля 704 управления зарядкой, и SOC. Например, если SOC в качестве цели после зарядки задается через запрос пользователя, модуль 704 управления зарядкой вычисляет время (T1) зарядки от текущего SOC до целевого SOC.
[0059] Соответственно, модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки из определенной позиции катушки 1A для передачи энергии и SOC. Вычисленное время (T1) зарядки увеличивается по мере того, как растет позиционное смещение катушки 1A для передачи энергии относительно позиции катушки 1B для приема энергии. По мере того как снижается SOC, увеличивается время зарядки.
[0060] Кроме того, модуль 705 вычисления времени зарядки вычисляет время (T2) зарядки на основе SOC, если катушка 1B для приема энергии размещается в позиции, соответствующей позиции катушки 1A для передачи энергии. Позиция катушки 1B для приема энергии, соответствующая позиции катушки 1A для передачи энергии, является позицией, в которой центр катушки 1A для передачи энергии совмещается с центром катушки 1B для приема энергии в направлении плоскости катушки 1A для передачи энергии и катушки 1B для приема энергии. В этом состоянии эффективность приема энергии между катушкой 1A для передачи энергии и катушкой 1B для приема энергии является наибольшей и соответствует идеальному состоянию парковки транспортного средства. Кроме того, идеальное состояние парковки транспортного средства является состоянием, в котором катушка 1A для передачи энергии непосредственно обращена к катушке 1B для приема энергии, и время зарядки является самым коротким. Следовательно, в состоянии с идентичным SOC, время (T1) зарядки, когда возникает позиционное смещение катушки, превышает время (T2) зарядки.
[0061] Если катушка 1B для приема энергии размещается в позиции, соответствующей позиции катушки 1A для передачи энергии (в идеальном состоянии парковки транспортного средства), заранее определяются потери энергии, когда энергия передается из катушки 1A для передачи энергии в катушку 1B для приема энергии. Следовательно, если выходная мощность из катушки 1A для передачи энергии в катушку 1B для приема энергии является фиксированной, мощность приема катушки 1B для приема энергии в идеальном состоянии парковки транспортного средства заранее определяется. Соответственно, модуль 705 вычисления времени зарядки может вычислять время (T2) зарядки посредством использования текущего SOC без использования информации позиции катушки 1A для передачи энергии.
[0062] В модуле 100 на стороне земли, если варьируется выходная мощность из катушки 1A для передачи энергии в катушку 1B для приема энергии, ECU 7 определяет выходную мощность катушки 1A для передачи энергии, заданную посредством ECU 3, через устройства 8A и 8B связи. ECU 7 вычисляет мощность приема катушки 1B для приема энергии посредством вычитания потерь энергии во время передачи энергии в идеальном состоянии парковки транспортного средства из выходной мощности. Модуль 704 управления зарядкой задает мощность зарядки аккумулятора 5 из мощности зарядки, запрашиваемой из BC 6, и мощности приема катушки 1B для приема энергии. Затем модуль 705 вычисления времени зарядки может вычислять время (T2) зарядки посредством использования мощности зарядки и текущего SOC.
[0063] Когда модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки и время (T2) зарядки, ECU 7 вычисляет разность (ΔT) по времени между временем (T1) зарядки и временем (T2) зарядки и сравнивает разность по времени с заранее заданной разностью (ΔTc) по времени. Разность (ΔTc) по времени представляет разность по времени относительно допустимого времени зарядки относительно времени (T2) зарядки. Иными словами, если позиционное смещение катушки возникает относительно позиции катушки, соответствующей времени (T2) зарядки, время (T1) зарядки превышает время (T2) зарядки и время (T1) зарядки увеличивается по мере того, как растет позиционное смещение катушки. Следовательно, разность (ΔTc) по времени соответствует допустимой степени позиционного смещения катушки. Разность (ΔTc) по времени может задаваться таким образом, что она соответствует заранее предполагаемому времени зарядки, или может задаваться в соответствии со временем зарядки, запрашиваемым пассажиром. По мере того как время зарядки, запрашиваемое пассажиром, становится более длительным, увеличивается разность (ΔTc) по времени.
[0064] Затем, если разность (ΔT) по времени превышает разность (ΔTc) по времени, ECU 7 определяет то, что позиционное смещение катушки осуществляется в такой степени, что зарядка не может завершаться в пределах допустимого времени зарядки, и инструктирует модулю 706 уведомления о времени уведомлять пассажира относительно времени (T1) зарядки. Пассажир распознает время (T1) зарядки, и если пассажир определяет то, что аккумулятор 5 может быть заряжен в течение времени (T1) зарядки, пассажир нажимает кнопку начала зарядки и т.п. (не показана), чтобы начинать зарядку. Напротив, если пассажир определяет не заряжать аккумулятор 5 в течение времени (T1) зарядки, водитель повторно паркует транспортное средство таким образом, что сокращается позиционное смещение катушки.
[0065] Если разность (ΔT) по времени превышает разность (ΔTc) по времени, ECU 7 определяет то, что позиционное смещение катушки происходит в такой степени, что зарядка может завершаться в пределах допустимого времени зарядки, и ECU 7 управляет модулем 704 управления зарядкой, чтобы начинать зарядку для аккумулятора 5.
[0066] Следовательно, в этом варианте осуществления время (T1) зарядки вычисляется в соответствии с позицией катушки 1A для передачи энергии и SOC, выдается уведомление относительно времени (T1) зарядки в соответствии с результатом сравнения между временем (T1) зарядки и временем (T2) зарядки, и аккумулятор 5 заряжается.
[0067] Далее управляющая процедура бесконтактной зарядной системы согласно этому варианту осуществления описывается со ссылкой на фиг. 10. Фиг. 10 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы согласно этому варианту осуществления. Когда управление посредством бесконтактной зарядной системы согласно этому варианту осуществления начинается, на этапе S11, модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию определенного SOC в ECU 7. На этапе S12 ECU 7 определяет позицию катушки передачи 1A через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. На этапе S13 модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки в соответствии с определенной позицией катушки 1A для передачи энергии и SOC. На этапе S14 модуль 705 вычисления времени зарядки вычисляет время (T2) зарядки в соответствии с SOC.
[0068] На этапе S15 ECU 7 вычисляет разность (ΔT) по времени между временем (T1) зарядки и временем (T2) зарядки и сравнивает разность (ΔT) по времени с заранее заданным временем (ΔTc). Если разность (ΔT) по времени равна или меньше времени (ΔTc), ECU 7 определяет то, что зарядка может завершаться в пределах заранее заданного допустимого времени. Модуль 704 управления зарядкой начинает зарядку для аккумулятора 5 посредством задания мощности зарядки в соответствии с SOC аккумулятора 5 и мощностью приема катушки 1B для приема энергии и подачи мощности зарядки в аккумулятор 5 (этап S16).
[0069] Напротив, если разность (ΔT) по времени превышает разность (ΔTc) по времени, ECU 7 определяет то, что зарядка не может завершаться в пределах заранее заданного допустимого времени. Модуль 706 уведомления о времени уведомляет пассажира относительно времени (T1) зарядки посредством отображения времени (T1) зарядки на дисплее и т.п. навигационного устройства (этап S151). На этапе S152 пассажир определяет то, выполняется или нет зарядка в течение времени (T1) зарядки. Если пассажир определяет то, что зарядка для аккумулятора 5 может занимать время (T1) зарядки, нажимает кнопку начала зарядки (не показана) и т.п. и, следовательно, начинает зарядку, обработка переходит к этапу S16. Если пассажир определяет то, что заряд в течение времени (T1) зарядки не выполняется, водитель повторно паркует транспортное средство на этапе S153 и обработка возвращается к этапу S11. Например, при условии, что разность (ΔTc) по времени составляет один час, если время (T1) зарядки составляет девять часов, а время (T2) зарядки составляет семь часов, и если пассажир считает, что зарядка может завершаться за десять часов, транспортное средство не должно повторно парковаться в идеальном состоянии парковки, и этот вариант осуществления начинает зарядку в течение времени (T1) зарядки. Напротив, если пассажир хочет завершать заряд за восемь часов, поскольку зарядка не может завершаться за требуемое для пассажира время при взаимном расположении между катушками для времени (T1) зарядки, транспортное средство паркуется повторно.
[0070] Затем, когда SOC аккумулятора 5 становится полным зарядом, завершается управление посредством бесконтактной зарядной системы согласно этому варианту осуществления.
[0071] Как описано выше, бесконтактное зарядное устройство согласно этому варианту осуществления включает в себя катушку 1B для приема энергии, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, модуль 601 определения состояния зарядки, устройства 8A и 8B связи и модуль 705 вычисления времени зарядки. Время (T1) зарядки аккумулятора 5 вычисляется в соответствии с определенной позицией катушки 1A для передачи энергии и SOC. Время (T1) зарядки аккумулятора 5 варьируется в зависимости от позиционного смещения между катушкой 1B для приема энергии и катушкой 1A для передачи энергии и SOC. В этом варианте осуществления, поскольку время (T1) зарядки может быть вычислено в соответствии с позицией катушки 1A для передачи энергии и SOC, например, когда время (T1) зарядки уведомляется пассажиру, пассажир может распознавать время (T1) зарядки, соответствующее позиционному смещению катушки. Кроме того, если сообщенное время (T1) зарядки является длительным, пассажир может распознавать, что позиционное смещение катушки является большим. Посредством повторной парковки транспортного средства и сокращения позиционного смещения катушки может быть сокращено время зарядки. Если пассажир имеет достаточное время для времени зарядки, даже если позиционное смещение катушки является большим, и время (T1) зарядки является длительным, пассажир может заряжать аккумулятор 5. Следовательно, водитель может избегать сложной задачи повторной парковки транспортного средства и совмещения позиции катушки. Как результат этот вариант осуществления может повышать удобство для пользователя.
[0072] Кроме того, например, если задается допустимое время (Ts) зарядки, допустимая степень позиционного смещения катушки может быть определена посредством времени зарядки. Следовательно, посредством сравнения времени (T1) зарядки со временем (Ts) зарядки можно выяснить, может или нет завершаться зарядка в пределах времени (Ts) зарядки. Более конкретно зарядка разрешается, если время (T1) зарядки меньше времени (Ts) зарядки, и зарядка не разрешается, если время (T1) зарядки превышает время (Ts) зарядки. Затем, на основе результата оценки, водитель может парковать транспортное средство таким образом, что поддерживается взаимное расположение между катушками, которое должно разрешаться в соответствии с SOC. Этот вариант осуществления может повышать удобство для пользователя. Кроме того, если время (T1) зарядки относительно позиционного смещения катушки превышает допустимое время (Ts) зарядки посредством повторной парковки транспортного средства и сокращения позиционного смещения катушки, общее время зарядки может быть сокращено. Допустимое время (Ts) зарядки может быть временем, которое задается пассажиром.
[0073] Кроме того, в этом варианте осуществления вычисляется время (T2) зарядки аккумулятора 5, если катушка 1B для приема энергии размещается в позиции, соответствующей позиции катушки 1A для передачи энергии. В этом варианте осуществления, поскольку вычисляются время (T1) зарядки и время (T2) зарядки, степень позиционного смещения катушки для центральных точек катушки 1A для передачи энергии и катушки 1B для приема энергии может быть определена посредством времени зарядки.
[0074] Кроме того, в этом варианте осуществления, если разность (ΔT) по времени между временем (T1) зарядки и временем (T2) зарядки превышает разность (ΔTc) по времени, модуль 706 уведомления о времени выдает уведомление, по меньшей мере, относительно времени (T1) зарядки. Соответственно, случай, в котором зарядка не может завершаться за допустимое время, поскольку позиционное смещение катушки является большим, может быть передан пользователю. Кроме того, пользователь может выполнять заряд в течение времени (T1) зарядки, если пользователь имеет достаточное время, и пользователь может выполнять заряд в течение времени, меньшего времени (T1) зарядки, например, посредством повторной парковки транспортного средства и изменения позиции катушки, если пользователь не имеет достаточного времени. Как результат этот вариант осуществления может снижать общее время зарядки при повышении удобства для пользователя.
[0075] На этапе S151 модуль 706 уведомления о времени выдает уведомление относительно времени (T1) зарядки, если разность (ΔT) по времени превышает разность (ΔTc) по времени. Помимо этого, также может быть уведомлено время (T2) зарядки. Модуль 706 уведомления о времени может выдавать уведомление, по меньшей мере, относительно времени (T1) зарядки. Если модуль 706 уведомления о времени выдает уведомление относительно времени (T1) зарядки и времени (T2) зарядки, пассажир может распознавать время (T1) зарядки в текущем состоянии парковки и время (T2) зарядки в идеальном состоянии парковки. Пассажир по мере необходимости может выбирать начало зарядки или повторную парковку транспортного средства. Следовательно, этот вариант осуществления может повышать удобство для пользователя.
[0076] Модуль 705 вычисления времени зарядки соответствует "средству вычисления времени зарядки", а модуль 706 уведомления о времени соответствует "средству уведомления о времени зарядки".
[0077] ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 11 является структурной схемой, показывающей бесконтактную зарядную систему согласно еще одному другому варианту осуществления настоящего изобретения. Этот вариант осуществления отличается от вышеописанного второго варианта осуществления тем, что предоставляется модуль 707 вычисления потребления. Конфигурация, за исключением этого модуля, является аналогичной конфигурации второго варианта осуществления, и описание включается при необходимости.
[0078] Как показано на фиг. 11, ECU 7 включает в себя модуль 704 управления зарядкой, модуль 705 вычисления времени зарядки, модуль 706 уведомления о времени и модуль 707 вычисления потребления. Модуль 707 вычисления потребления вычисляет потребление аккумулятора 5, которое должно быть потреблено, когда движется транспортное средство, включающее в себя модуль 200 на стороне транспортного средства.
[0079] В бесконтактной зарядной системе согласно второму варианту осуществления на этапе S153 по фиг. 10 водитель повторно паркует транспортное средство и совмещает позиции катушки 1A для передачи энергии и катушки 1B для приема энергии друг с другом. Когда транспортное средство повторно паркуется, потребляется энергия, заряженная в аккумуляторе 5. Вследствие этого время зарядки, когда транспортное средство повторно паркуется и аккумулятор 5 заряжается в идеальном состоянии парковки, представляет собой время, полученное посредством суммирования времени зарядки для зарядки емкости, соответствующей потреблению посредством повторной парковки, со временем (T2) зарядки.
[0080] В этом варианте осуществления модуль 707 вычисления потребления вычисляет потребление аккумулятора 5, которое должно быть потреблено посредством перемещения катушки 1B для приема энергии в позицию, соответствующую позиции катушки 1A для передачи энергии посредством повторной парковки. Иными словами, модуль 707 вычисления потребления вычисляет величину энергии, которая должна потребляться посредством аккумулятора 5 посредством парковки транспортного средства из текущего состояния парковки в идеальное состояние парковки. Затем модуль 705 вычисления времени зарядки вычисляет время (T3) зарядки для зарядки для потребления. Другими словами, модуль 705 вычисления времени зарядки преобразует потребление аккумулятора 5 во время зарядки. Когда транспортное средство паркуется и возникает позиционное смещение катушки, время зарядки для зарядки аккумулятора 5 до полного заряда является временем (T1) зарядки, вычисленным посредством модуля 705 вычисления времени зарядки. Кроме того, когда транспортное средство повторно паркуется из состояния парковки с позиционным смещением катушки, возникающим относительно идеального состояния парковки, время (T4) зарядки для зарядки аккумулятора 5 до полного заряда вычисляется так, что модуль 705 вычисления времени зарядки суммирует время (T3) зарядки со временем (T2) зарядки.
[0081] Модуль 705 вычисления времени зарядки вычисляет время (T4) зарядки до того, как транспортное средство паркуется повторно. Иными словами, траектория движения, когда транспортное средство повторно паркуется из состояния парковки с позиционным смещением катушки, возникающим относительно идеального состояния парковки, вычисляется посредством использования системы вычисления оптимального пути и т.п., используемой посредством навигации или управления для обхода препятствий и т.п. Следовательно, модуль 601 определения состояния заряда определяет текущее SOC, и затем средство 707 вычисления потребления может вычислять потребление аккумулятора 5 на основе SOC и траектории движения перед повторной парковкой.
[0082] Затем ECU 7 сравнивает время (T1) зарядки со временем (T4) зарядки. Если время (T1) зарядки превышает время (T4) зарядки, время зарядки сокращается при условии, что водитель повторно паркует транспортное средство в идеальное состояние парковки. Следовательно, если время (T1) зарядки превышает время (T4) зарядки, ECU 7 управляет модулем 706 уведомления о времени, чтобы выдавать уведомление относительно времени (T1) зарядки и времени (T4) зарядки и предлагать пассажиру определять то, начинается или нет зарядка либо повторно паркуется или нет транспортное средство. Напротив, если время (T1) зарядки меньше времени (T4) зарядки, время зарядки увеличивается при условии, что водитель повторно паркует транспортное средство. Время зарядки может быть сокращено при условии, что зарядка выполняется в текущем состоянии парковки. Следовательно, если время (T1) зарядки меньше времени (T4) зарядки, ECU 7 инструктирует модулю 704 управления зарядкой начинать зарядку для аккумулятора 5.
[0083] Как описано выше, в этом варианте осуществления вычисляются время (T1) зарядки в текущем состоянии парковки и время (T4) зарядки в идеальном состоянии относительно потребления аккумулятора 5 посредством повторной парковки и аккумулятор 5 заряжается в соответствии с результатом сравнения между временем (T1) зарядки и временем (T4) зарядки.
[0084] Далее управляющая процедура бесконтактной зарядной системы согласно этому варианту осуществления описывается со ссылкой на фиг. 12. Фиг. 12 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы согласно этому варианту осуществления. Когда управление посредством бесконтактной зарядной системы согласно этому варианту осуществления начинается, выполняется обработка управления от этапа S21 до этапа S24. Обработка управления от этапа S21 до этапа S24 является аналогичной обработке управления от этапа S11 до этапа S14 согласно второму варианту осуществления, и, следовательно, описание опускается. После этапа S24 модуль 707 вычисления потребления вычисляет потребление аккумулятора 5, которое должно быть потреблено, когда транспортное средство повторно паркуется, и катушка 1B для приема энергии перемещается в позицию, соответствующую катушке 1A для передачи энергии. Затем модуль 705 вычисления времени зарядки вычисляет время (T3) зарядки для зарядки емкости, соответствующей потреблению (этап S25). На этапе S26 ECU 7 инструктирует модулю 705 вычисления времени зарядки вычислять время (T4) зарядки посредством суммирования времени (T3) зарядки со временем (T2) зарядки и сравнивать время (T1) зарядки со временем (T4) зарядки.
[0085] Если время (T1) зарядки равно или меньше времени (T4) зарядки, время зарядки может быть сокращено при условии, что зарядка выполняется в текущем состоянии парковки, а не тогда, когда транспортное средство паркуется повторно. Следовательно, ECU 7 инструктирует модулю 704 управления зарядкой начинать зарядку для аккумулятора 5 посредством задания мощности зарядки в соответствии с SOC аккумулятора 5 и мощностью приема катушки 1B для приема энергии и подачи мощности зарядки в аккумулятор 5 (этап S27).
[0086] Напротив, если время (T1) зарядки превышает время (T4) зарядки, время зарядки может быть сокращено при условии, что транспортное средство паркуется повторно в идеальном состоянии парковки. На этапе S261 модуль 706 уведомления о времени уведомляет пассажира относительно времени (T1) зарядки и времени (T4) зарядки посредством отображения времени (T1) зарядки и времени (T4) зарядки на дисплее и т.п. навигационного устройства. На этапе S262 пассажир определяет то, выполняется или нет зарядка в течение времени (T1) зарядки. Если пассажир определяет то, что зарядка для аккумулятора 5 может занимать время (T1) зарядки, нажимает кнопку начала зарядки (не показана) и т.п. и, следовательно, начинает зарядку, обработка переходит к этапу S27. Если пассажир определяет то, что заряд должен быть выполнен в течение времени (T4) зарядки, которое меньше времени (T1) зарядки, водитель повторно паркует транспортное средство на этапе S263 и обработка возвращается к этапу S21.
[0087] Затем, когда SOC аккумулятора 5 становится полным зарядом, завершается управление посредством бесконтактной зарядной системы согласно этому варианту осуществления.
[0088] Как описано выше, в бесконтактном зарядном устройстве согласно этому варианту осуществления модуль 707 вычисления потребления вычисляет потребление аккумулятора 5, которое должно быть потреблено, когда транспортное средство, включающее в себя модуль 200 на стороне транспортного средства, повторно паркуется, и катушка 1B для приема энергии перемещается в позицию, соответствующую катушке 1A для передачи энергии, и затем вычисляет время (T3) зарядки для зарядки емкости, соответствующей потреблению. Соответственно, время зарядки, когда повторная парковка выполняется, может быть вычислено относительно потребления аккумулятора 5, которое должно потребляться, когда транспортное средство повторно паркуется в идеальном состоянии парковки. Кроме того, в этом варианте осуществления, поскольку время зарядки сокращается через сравнение между временем (T1) зарядки и временем (T4) зарядки, выясняется то, должно или нет транспортное средство повторно парковаться, и общее время зарядки может быть сокращено.
[0089] Кроме того, в этом варианте осуществления модуль 705 вычисления времени зарядки вычисляет время (T4) зарядки посредством суммирования времени (T3) зарядки со временем (T2) зарядки, и если время (T4) зарядки меньше времени (T1) зарядки, модуль 706 уведомления о времени выдает уведомление относительно времени (T1) зарядки и времени (T4) зарядки. Соответственно, в этом варианте осуществления пользователь может распознавать, что время зарядки сокращается, если пользователь повторно паркует транспортное средство. Кроме того, пользователь может определять то, паркуется ли повторно транспортное средство, в зависимости от требуемого времени зарядки пользователя. Как результат этот вариант осуществления может повышать удобство для пользователя.
[0090] Кроме того, в этом варианте осуществления, если время (T4) зарядки превышает время (T1) зарядки, зарядка начинается в позиции катушки 1A для передачи энергии относительно катушки 1B для приема энергии, когда возникает позиционное смещение катушки. Соответственно, если время зарядки меньше в текущем состоянии парковки, а не тогда, когда транспортное средство паркуется повторно, зарядка может начинаться без повторной парковки. Может быть повышено удобство для пользователя.
[0091] Кроме того, в этом варианте осуществления, если транспортное средство повторно паркуется, выходная мощность приводного двигателя (не показан) транспортного средства может быть ограничена, чтобы подавлять потребление аккумулятора посредством повторной парковки в максимально возможной степени. Соответственно, может быть легко оценено время потребления аккумулятора. Дополнительно, если повторная парковка автоматизирована, оценка становится проще.
[0092] Модуль 707 вычисления потребления соответствует "средству вычисления потребления" согласно настоящему изобретению.
[0093] ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 13 является структурной схемой, показывающей бесконтактную зарядную систему согласно еще одному другому варианту осуществления настоящего изобретения. Этот вариант осуществления отличается от вышеописанного второго варианта осуществления тем, что предоставляются модуль 707 вычисления потребления, модуль 708 вычисления времени парковки и модуль 709 уведомления относительно повторной парковки. Конфигурация, за исключением конфигурации, описанной выше, является аналогичной конфигурации второго варианта осуществления, и описание второго и третьего вариантов осуществления включается при необходимости.
[0094] Как показано на фиг. 13, ECU 7 включает в себя модуль 704 управления зарядкой, модуль 705 вычисления времени зарядки, модуль 706 уведомления о времени, модуль 707 вычисления потребления, модуль 708 вычисления времени парковки и средство 709 уведомления относительно повторной парковки. Модуль 708 вычисления времени парковки вычисляет время (Tp) парковки для парковки транспортного средства, включающего в себя модуль 200 на стороне транспортного средства, из текущего состояния парковки в идеальное состояние парковки. Средство 709 уведомления относительно повторной парковки выдает уведомление для предложения пассажиру выполнять повторную парковку в предварительно определенном состоянии. Уведомление выдается, например, через отображение на модуле отображения и т.п. навигационного устройства. Если водитель повторно паркует транспортное средство и совмещает позицию катушки 1A для передачи энергии с позицией катушки 1B для приема энергии, повторная парковка и совмещение занимают время (Tp) парковки для передвижения транспортного средства. На основе состояния с позиционным смещением катушки, время зарядки для повторной парковки транспортного средства в идеальном состоянии и выполнения зарядки до полного заряда может учитывать время (Tp) парковки.
[0095] Вследствие этого в этом варианте осуществления, модуль 708 вычисления времени парковки вычисляет время (Tp) парковки, и модуль 705 вычисления времени зарядки суммирует время (T3) зарядки и время (Tp) парковки со временем (T2) зарядки и тем самым вычисляет время (T5) зарядки. Когда транспортное средство паркуется и возникает позиционное смещение катушки, время зарядки для зарядки аккумулятора 5 до полного заряда является временем (T1) зарядки, вычисленным посредством модуля 705 вычисления времени зарядки. Кроме того, когда транспортное средство повторно паркуется из состояния парковки с позиционным смещением катушки, возникающим относительно идеального состояния парковки, время (T5) зарядки для зарядки аккумулятора 5 до полного заряда вычисляется так, что модуль 705 вычисления времени зарядки суммирует время (T3) зарядки и время (Tp) парковки со временем (T2) зарядки.
[0096] Модуль 708 вычисления времени парковки вычисляет время (Tp) парковки до того, как транспортное средство паркуется повторно. Иными словами, траектория движения, когда транспортное средство повторно паркуется из состояния парковки с позиционным смещением катушки, возникающим относительно идеального состояния парковки, вычисляется посредством использования системы вычисления оптимального пути и т.п., используемой посредством навигации или управления для обхода препятствий и т.п. Следовательно, модуль 708 вычисления времени парковки может вычислять время (Tp) парковки перед повторной парковкой на основе траектории движения и заранее заданной средней скорости, когда паркуется транспортное средство.
[0097] Затем ECU 7 сравнивает время (T1) зарядки со временем (T5) зарядки. Если время (T1) зарядки превышает время (T5) зарядки, время зарядки сокращается, если водитель повторно паркует транспортное средство в идеальное состояние парковки. Следовательно, если время (T1) зарядки превышает время (T5) зарядки, ECU 7 инструктирует модулю 706 уведомления о времени выдавать уведомление относительно времени (T1) зарядки и времени (T5) зарядки и инструктирует средству 709 уведомления относительно повторной парковки выдавать уведомление относительно повторной парковки.
[0098] Как описано выше, в этом варианте осуществления вычисляются время (T1) зарядки в текущем состоянии парковки и время (T5) зарядки в идеальном состоянии относительно потребления аккумулятора 5 посредством повторной парковки и времени (Tp) парковки и аккумулятор 5 заряжается в соответствии с результатом сравнения между временем (T1) зарядки и временем (T5) зарядки.
[0099] Далее управляющая процедура бесконтактной зарядной системы согласно этому варианту осуществления описывается со ссылкой на фиг. 14. Фиг. 14 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы согласно этому варианту осуществления. Когда управление посредством бесконтактной зарядной системы согласно этому варианту осуществления начинается, выполняется обработка управления от этапа S31 до этапа S35. Обработка управления от этапа S31 до этапа S35 является аналогичной обработке управления от этапа S21 до этапа S25 согласно третьему варианту осуществления, и, следовательно, описание опускается. После этапа S35 модуль 708 вычисления времени парковки вычисляет время (Tp) парковки для повторной парковки транспортного средства, чтобы перемещать катушку 1B для приема энергии в позицию, соответствующую катушке 1A для передачи энергии (этап S36). На этапе S37 ECU 7 инструктирует модулю 705 вычисления времени зарядки вычислять время (T5) зарядки посредством суммирования времени (T3) зарядки и времени (Tp) парковки со временем (T2) зарядки и сравнивать время (T1) зарядки со временем (T5) зарядки.
[0100] Если время (T1) зарядки равно или меньше времени (T5) зарядки, время зарядки может быть сокращено при условии, что зарядка выполняется в текущем состоянии парковки, а не тогда, когда транспортное средство паркуется повторно. Следовательно, ECU 7 инструктирует модулю 704 управления зарядкой начинать зарядку для аккумулятора 5 посредством задания мощности зарядки в соответствии с SOC аккумулятора 5 и мощностью приема катушки 1B для приема энергии и подачи мощности зарядки в аккумулятор 5 (этап S38).
[0101] Напротив, если время (T1) зарядки превышает время (T5) зарядки, время зарядки может быть сокращено при условии, что транспортное средство паркуется повторно в идеальном состоянии парковки. На этапе S371 модуль 706 уведомления о времени уведомляет пассажира относительно времени (T1) зарядки и времени (T5) зарядки посредством отображения времени (T1) зарядки и времени (T5) зарядки на дисплее и т.п. навигационного устройства. Кроме того, на этапе S372 средство 709 уведомления относительно повторной парковки выдает уведомление для предложения повторной парковки.
[0102] На этапе S373 пассажир определяет то, выполняется или нет зарядка в течение времени (T1) зарядки. Если пассажир определяет то, что зарядка для аккумулятора 5 может занимать время (T1) зарядки, нажимает кнопку начала зарядки (не показана) и т.п. и, следовательно, начинает зарядку, обработка переходит к этапу S38. Если пассажир определяет то, что заряд должен быть выполнен в течение времени (T5) зарядки, которое меньше времени (T1) зарядки, водитель повторно паркует транспортное средство на этапе S374 и обработка возвращается к этапу S31.
[0103] Затем, когда SOC аккумулятора 5 становится полным зарядом, завершается управление посредством бесконтактной зарядной системы согласно этому варианту осуществления.
[0104] Как описано выше, в бесконтактном зарядном устройстве согласно этому варианту осуществления модуль 708 вычисления времени парковки вычисляет время (Tp) парковки для повторной парковки транспортного средства, включающего в себя модуль 200 на стороне транспортного средства, чтобы перемещать катушку 1B для приема энергии в позицию, соответствующую катушке 1A для передачи энергии. Соответственно, время зарядки, когда повторная парковка выполняется, может быть вычислено посредством учета времени парковки, когда транспортное средство повторно паркуется в идеальном состоянии парковки. Кроме того, в этом варианте осуществления, поскольку время зарядки сокращается через сравнение между временем (T1) зарядки и временем (T5) зарядки, выясняется то, должно или нет транспортное средство повторно парковаться, и общее время зарядки может быть сокращено.
[0105] Кроме того, в этом варианте осуществления модуль 705 вычисления времени зарядки вычисляет время (T5) зарядки посредством суммирования времени (T3) зарядки и времени (Tp) парковки со временем (T2) зарядки, и если время (T5) зарядки меньше времени (T1) зарядки, модуль 706 уведомления о времени выдает уведомление относительно времени (T1) зарядки и времени (T5) зарядки. Соответственно, в этом варианте осуществления пользователь может распознавать, что время зарядки сокращается, если пользователь повторно паркует транспортное средство. Кроме того, пользователь может определять то, повторно паркуется или нет транспортное средство, в зависимости от требуемого времени зарядки пользователя. Как результат этот вариант осуществления может повышать удобство для пользователя.
[0106] Кроме того, в этом варианте осуществления, если время (T5) зарядки меньше времени (T1) зарядки, модуль 709 уведомления относительно повторной парковки выдает уведомление для предложения повторной парковки. Соответственно, в этом варианте осуществления пользователь может распознавать, что время зарядки сокращается, если пользователь повторно паркует транспортное средство. Кроме того, пользователь может определять то, повторно паркуется или нет транспортное средство, в зависимости от требуемого времени зарядки пользователя. Как результат этот вариант осуществления может повышать удобство для пользователя.
[0107] Кроме того, в этом варианте осуществления, если время (T5) зарядки превышает время (T1) зарядки, зарядка начинается в позиции катушки 1A для передачи энергии относительно катушки 1B для приема энергии, когда возникает позиционное смещение катушки. Соответственно, если время зарядки меньше в текущем состоянии парковки, а не тогда, когда транспортное средство паркуется повторно, зарядка может начинаться без повторной парковки. Может быть повышено удобство для пользователя.
[0108] Модуль 708 вычисления времени парковки соответствует "средству вычисления времени парковки" согласно настоящему изобретению, и модуль 709 уведомления относительно повторной парковки соответствует "средству уведомления относительно повторной парковки" согласно настоящему изобретению.
ПЯТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
[0109] Фиг. 15 является структурной схемой, показывающей бесконтактную зарядную систему согласно дополнительному варианту осуществления настоящего изобретения. Этот вариант осуществления отличается от вышеописанного первого варианта осуществления тем, что предоставляются модуль 705 вычисления времени зарядки и модуль 706 уведомления о времени. Конфигурация, за исключением этих модулей, является аналогичной конфигурации второго варианта осуществления, и описание включается при необходимости.
[0110] Как показано на фиг. 15, ECU 7 включает в себя модуль 701 задания допустимого диапазона зарядки, модуль 702 оценки, модуль 703 уведомления результатов оценки, модуль 704 управления зарядкой, модуль 705 вычисления времени зарядки и модуль 706 уведомления о времени. Модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки в соответствии с SOC. Модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки до полного заряда в соответствии с позицией катушки 1A для передачи энергии относительно катушки 1B для приема энергии и SOC. Кроме того, модуль 705 вычисления времени зарядки вычисляет время (T2) зарядки на основе SOC, если катушка 1B для приема энергии размещается в позиции, соответствующей позиции катушки 1A для передачи энергии. Время (T1) зарядки указывает время зарядки для позиции катушки в текущем состоянии парковки транспортного средства. Время (T2) зарядки указывает время зарядки для позиции катушки в идеальном состоянии парковки. ECU 7 заранее задает разность (ΔTc) по времени для сравнения с разностью (ΔT) по времени между временем (T1) зарядки и временем (T2) зарядки. Разность (ΔTc) по времени представляет разность по времени относительно времени зарядки, допустимого относительно времени (T2) зарядки.
[0111] Здесь допустимый диапазон зарядки и разность (ΔTc) по времени указывают допустимую степень позиционного смещения катушки относительно идеального состояния транспортного средства, соответственно, с точки зрения пространственного диапазона и времени. Разность (ΔTc) по времени задается таким образом, что допустимая степень позиционного смещения катушки увеличивается относительно допустимого диапазона зарядки. Например, при SOC с определенным значением, даже когда позиция катушки 1A для передачи энергии определяется за пределами допустимого диапазона зарядки, если разность (ΔT) по времени между временем (T1) зарядки и временем (T2) зарядки меньше разности (ΔTc) по времени, определяется то, что позиционное смещение катушки меньше допустимой степени, и зарядка разрешается.
[0112] Далее управляющая процедура бесконтактной зарядной системы согласно этому варианту осуществления описывается со ссылкой на фиг. 16. Фиг. 16 является блок-схемой последовательности операций способа, показывающей управляющую процедуру бесконтактной зарядной системы согласно этому варианту осуществления. Когда управление посредством бесконтактной зарядной системы согласно этому варианту осуществления начинается, на этапе S41, модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию определенного SOC в ECU 7. На этапе S42 модуль 701 задания допустимого диапазона зарядки задает допустимый диапазон зарядки в соответствии с определенным SOC. На этапе S43 ECU 7 определяет позицию катушки передачи 1A через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. На этапе S44, модуль 702 оценки определяет то, находится или нет позиция катушки 1A для передачи энергии в пределах допустимого диапазона зарядки.
[0113] Если позиция катушки 1A для передачи энергии находится в пределах допустимого диапазона зарядки, на этапе S45, модуль 704 управления зарядкой начинает зарядку для аккумулятора 5 посредством задания мощности зарядки в соответствии с SOC аккумулятора 5 и мощностью приема катушки 1B для приема энергии и подачи мощности зарядки в аккумулятор 5.
[0114] Напротив, если позиция катушки 1A для передачи энергии не находится в пределах допустимого диапазона зарядки, на этапе S441 модуль 705 вычисления времени зарядки вычисляет время (T1) зарядки в соответствии с определенной позицией катушки 1A для передачи энергии и SOC. На этапе S442 модуль 705 вычисления времени зарядки вычисляет время (T2) зарядки в соответствии с SOC. На этапе S443 ECU 7 вычисляет разность (ΔT) по времени между временем (T1) зарядки и временем (T2) зарядки и сравнивает разность (ΔT) по времени с заранее заданным временем (ΔTc). Если разность (ΔT) по времени равна или меньше времени (ΔTc), даже если позиция катушки находится за пределами допустимого диапазона зарядки, ECU 7 определяет то, что зарядка может завершаться в пределах заранее заданного допустимого времени. Модуль 704 управления зарядкой начинает зарядку для аккумулятора 5 посредством задания мощности зарядки в соответствии с SOC аккумулятора 5 и мощностью приема катушки 1B для приема энергии и подачи мощности зарядки в аккумулятор 5 (этап S45).
[0115] Напротив, если разность (ΔT) по времени превышает разность (ΔTc) по времени, ECU 7 определяет то, что зарядка не может завершаться в пределах заранее заданного допустимого времени. Модуль 706 уведомления о времени уведомляет пассажира относительно времени (T1) зарядки посредством отображения времени (T1) зарядки на дисплее и т.п. навигационного устройства (этап S444). На этапе S445 пассажир определяет то, выполняется или нет зарядка в течение времени (T1) зарядки. Если пассажир определяет то, что зарядка для аккумулятора 5 может занимать время (T1) зарядки, нажимает кнопку начала зарядки (не показана) и т.п. и, следовательно, начинает зарядку, обработка переходит к этапу S45. Если пассажир определяет то, что заряд в течение времени (T1) зарядки не выполняется, водитель повторно паркует транспортное средство на этапе S446, и обработка возвращается к этапу S41.
[0116] Затем, когда SOC аккумулятора 5 становится полным зарядом, завершается управление посредством бесконтактной зарядной системы согласно этому варианту осуществления.
[0117] Как описано выше, бесконтактное зарядное устройство согласно этому варианту осуществления включает в себя катушку 1B для приема энергии, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, модуль 601 определения состояния заряда, устройства 8A и 8B связи, модуль 701 задания допустимого диапазона зарядки и модуль 705 вычисления времени зарядки; задает допустимый диапазон зарядки, который указывает диапазон позиции катушки 1A для передачи энергии для разрешения зарядки для аккумулятора, относительно позиции катушки 1B для приема энергии, в соответствии с SOC; и вычисляет время (T1) зарядки аккумулятора 5 в соответствии с определенной позицией катушки 1A для передачи энергии и SOC. В этом варианте осуществления, поскольку вычисляется допустимый диапазон зарядки и время зарядки и допуск для зарядки определяется на основе обоих вычисленных значений, может быть повышена точность оценки и, следовательно, может быть повышено удобство для пользователя.
[0118] Бесконтактная зарядная система согласно этому варианту осуществления может быть системой, которая вычисляет время (T3) зарядки и время (T4) зарядки и имеет дополнительную управляющую обработку на этапе S26, этапе S27 и этапах S261-S263, аналогично бесконтактной зарядной системе согласно третьему варианту осуществления, или может быть системой, которая вычисляет время (T5) зарядки и время (Tp) парковки и имеет дополнительную управляющую обработку на этапе S37, этапе S38 и этапах S371-S373 аналогично бесконтактной зарядной системе согласно четвертому варианту осуществления.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0119] 100 - модуль на стороне земли
1A - катушка для передачи энергии
2A - электрическая схема на стороне земли
3 - ECU
4 - системный источник питания
8A - устройство связи на стороне земли
200 - модуль на стороне транспортного средства
1B - катушка для приема энергии
2B - электрическая схема на стороне транспортного средства
5 - аккумулятор
6 - контроллер аккумулятора
7 - ECU
8B - устройство связи на стороне транспортного средства
601 - модуль определения состояния заряда
701 - модуль задания допустимого диапазона зарядки
702 - модуль оценки
703 - модуль уведомления результатов оценки
704 - модуль управления зарядкой
705 - модуль вычисления времени зарядки
706 - модуль уведомления о времени
707 - модуль вычисления потребления
708 - модуль вычисления времени парковки
709 - модуль уведомления относительно повторной парковки
Реферат
Бесконтактное зарядное устройство содержит: устройство приема энергии, которое имеет, по меньшей мере, катушку (1В) для приема энергии, которая принимает электроэнергию бесконтактным способом из катушки (1А) для передачи энергии посредством магнитного соединения; аккумулятор (5), который заряжается посредством электроэнергии; средство определения состояния заряда, которое определяет состояние заряда аккумулятора (5); средство определения позиции, которое определяет позицию катушки (1А) для передачи энергии; и средство вычисления времени зарядки, которое вычисляет первое время зарядки для аккумулятора (5) согласно состоянию заряда, определенное посредством средства определения состояния заряда, и первой позиции катушки (1А) для передачи энергии, определенной посредством средства определения позиции. Технический результат заключается в расширении допустимого диапазона времени зарядки и повышении удобства для пользователя. 12 з.п. ф-лы, 16 ил.
Формула
устройство приема энергии, включающее в себя катушку для приема энергии, которая принимает энергию из катушки для передачи энергии бесконтактным способом, по меньшей мере, через магнитную связь;
аккумулятор, который заряжается с использованием энергии;
средство определения состояния заряда для определения состояния заряда аккумулятора;
средство определения позиции для определения позиции катушки для передачи энергии; и
средство вычисления времени зарядки для вычисления первого времени зарядки аккумулятора в соответствии с состоянием заряда, определенным посредством средства определения состояния заряда, и первой позицией катушки для передачи энергии, определенной посредством средства определения позиции.
средство вычисления потребления для вычисления потребления аккумулятора, которое должно быть потреблено, когда транспортное средство, включающее в себя устройство приема энергии, повторно паркуется и катушка для приема энергии перемещается во вторую позицию,
при этом средство вычисления времени зарядки вычисляет третье время зарядки для зарядки емкости аккумулятора, соответствующей потреблению, вычисленному посредством средства вычисления потребления.
средство уведомления о времени зарядки для выдачи уведомления относительно времени зарядки,
при этом средство вычисления времени зарядки вычисляет четвертое время зарядки посредством суммирования третьего времени зарядки со вторым временем зарядки, и
при этом средство уведомления о времени зарядки выдает уведомление относительно первого времени зарядки и четвертого времени зарядки, если четвертое время зарядки меньше первого времени зарядки.
средство управления зарядкой для управления зарядкой для аккумулятора,
при этом средство вычисления времени зарядки вычисляет четвертое время зарядки посредством суммирования третьего времени зарядки со вторым временем зарядки, и
при этом средство управления зарядкой начинает зарядку для аккумулятора в состоянии, в котором катушка для передачи энергии размещается в первой позиции, если четвертое время зарядки превышает первое время зарядки.
средство уведомления о времени зарядки для выдачи уведомления относительно времени зарядки,
при этом средство вычисления времени зарядки вычисляет пятое время зарядки посредством суммирования третьего времени зарядки и времени парковки со вторым временем зарядки, и
при этом средство уведомления о времени зарядки выдает уведомление относительно первого времени зарядки и пятого времени зарядки, если пятое время зарядки меньше первого времени зарядки.
средство управления зарядкой для управления зарядкой для аккумулятора,
при этом средство вычисления времени зарядки вычисляет пятое время зарядки посредством суммирования третьего времени зарядки и времени парковки со вторым временем зарядки, и
при этом средство управления зарядкой начинает зарядку для аккумулятора в состоянии, в котором катушка для передачи энергии размещается в первой позиции, если пятое время зарядки превышает первое время зарядки.
средство уведомления относительно повторной парковки для вывода уведомления для рекомендации водителю транспортного средства выполнять повторную парковку,
при этом средство вычисления времени зарядки вычисляет пятое время зарядки посредством суммирования третьего времени зарядки и времени парковки со вторым временем зарядки, и
при этом средство уведомления относительно повторной парковки выводит уведомление для рекомендации повторной парковки, если пятое время зарядки меньше первого времени зарядки.
средство управления зарядкой для управления мощностью зарядки аккумулятора в соответствии с состоянием заряда, определенным посредством средства определения состояния заряда, и
при этом средство управления зарядного устройства снижает мощность зарядки ступенчато по мере того, как становится более высоким состояние заряда.
Документы, цитированные в отчёте о поиске
Беспроводная зарядная система с обратной связью
Транспортная система
Комментарии