Система беспроводной подачи энергии и устройство беспроводного приёма энергии - RU2632774C1
Код документа: RU2632774C1
Чертежи















Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе беспроводной подачи энергии и к устройству беспроводного приема энергии для беспроводной подачи энергии в транспортное средство, оснащенное электрической нагрузкой, такой как аккумулятор.
Уровень техники
[0002] На сегодняшний день известна беспроводная зарядная система, раскрытая в патентном документе 1, которая выполнена с возможностью подавать в беспроводном режиме энергию в транспортное средство, оснащенное аккумулятором (электрической нагрузкой), чтобы заряжать аккумулятор. Этот патентный документ 1 раскрывает то, что в случае, если присутствует множество устройств передачи энергии, катушка для передачи энергии слабо возбуждается, чтобы формировать случайный сигнал, который обнаруживается посредством транспортного средства, и транспортное средство и устройство передачи энергии спариваются между собой, если подтверждается то, что случайные сигналы совпадают между транспортным средством и устройством передачи энергии.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Международная публикация № WO2012/042902
Сущность изобретения
[0004] Тем не менее, в конфигурации в традиционном примере, раскрытом в вышеуказанном патентном документе 1, для того чтобы выполнять спаривание, транспортное средство въезжает и останавливается в месте для парковки, и в этом состоянии сигнал, содержащий случайный идентификационный шаблон, передается посредством катушки для передачи энергии и принимается посредством транспортного средства. По этой причине, возникает такая проблема, что требуется длительное время до того, как транспортное средство начинает фактически заряжаться, после остановки в месте для парковки.
[0005] Настоящее изобретение осуществлено для того, чтобы разрешать эту проблему в современном уровне техники, и его цель заключается в том, чтобы предоставлять систему беспроводной подачи энергии и устройство беспроводного приема энергии, допускающие быстрое спаривание с транспортным средством, въезжающим на место для парковки.
[0006] Система беспроводной подачи энергии согласно одному аспекту настоящего изобретения включает в себя устройство передачи энергии и устройство приема энергии, и устройство передачи энергии включает в себя катушку для передачи энергии, выполненную с возможностью передавать энергию, модуль управления подачей энергии, выполненный с возможностью управлять энергией, которая должна подаваться в катушку для передачи энергии, и модуль связи на стороне передачи энергии, выполненный с возможностью обмениваться данными с устройством приема энергии. Устройство приема энергии включает в себя катушку для приема энергии, выполненную с возможностью принимать энергию, передаваемую из катушки для передачи энергии, и подавать принимаемую энергию в транспортное средство в качестве движущей силы, подкатушки, предоставленные на передней стороне и задней стороне транспортного средства относительно катушки для приема энергии и выполненные с возможностью принимать, в качестве сигнала шаблона возбуждения, энергию, передаваемую из катушки для передачи энергии, модуль управления приемом энергии, выполненный с возможностью управлять приемом энергии катушки для приема энергии и подкатушек, и модуль связи на стороне приема энергии, выполненный с возможностью обмениваться данными с устройством передачи энергии. Когда транспортное средство приближается к месту для парковки, модуль управления подачей энергии выполняет возбуждение с использованием сигнала шаблона возбуждения, содержащего идентификационные данные. Модуль управления приемом энергии получает идентификационные данные из сигнала шаблона возбуждения, принимаемого посредством подкатушек, и модуль связи на стороне приема энергии передает полученные идентификационные данные в устройство передачи энергии. Модуль управления подачей энергии спаривает катушку для передачи энергии и катушку для приема энергии между собой, если идентификационные данные, содержащиеся в сигнале шаблона возбуждения, и идентификационные данные, передаваемые из модуля управления приемом энергии, совпадают между собой. Спаривание отменяется, если идентификационные данные, принимаемые посредством подкатушки, предоставленной на передней стороне, и идентификационные данные, принимаемые посредством подкатушки, предоставленной на задней стороне, отличаются друг от друга.
[0007] Устройство беспроводного приема энергии согласно одному аспекту настоящего изобретения включает в себя: катушку для приема энергии, выполненную с возможностью подавать принимаемую энергию в транспортное средство в качестве движущей силы; по меньшей мере, одну подкатушку, предоставленную на каждой из передней стороны и задней стороны транспортного средства относительно катушки для приема энергии и выполненную с возможностью принимать, в качестве сигнала шаблона возбуждения, энергию, передаваемую из катушки для передачи энергии устройства передачи энергии; модуль управления приемом энергии, выполненный с возможностью управлять приемом энергии катушки для приема энергии и подкатушек; и модуль связи на стороне приема энергии, выполненный с возможностью обмениваться данными с устройством передачи энергии. Когда устройство передачи энергии возбуждается с использованием сигнала шаблона возбуждения, содержащего идентификационные данные, модуль управления приемом энергии получает идентификационные данные из сигнала шаблона возбуждения, принимаемого посредством подкатушек, и передает полученные идентификационные данные в устройство передачи энергии.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
Фиг. 2 является пояснительной схемой, показывающей взаимосвязь между транспортным средством и множеством мест для парковки.
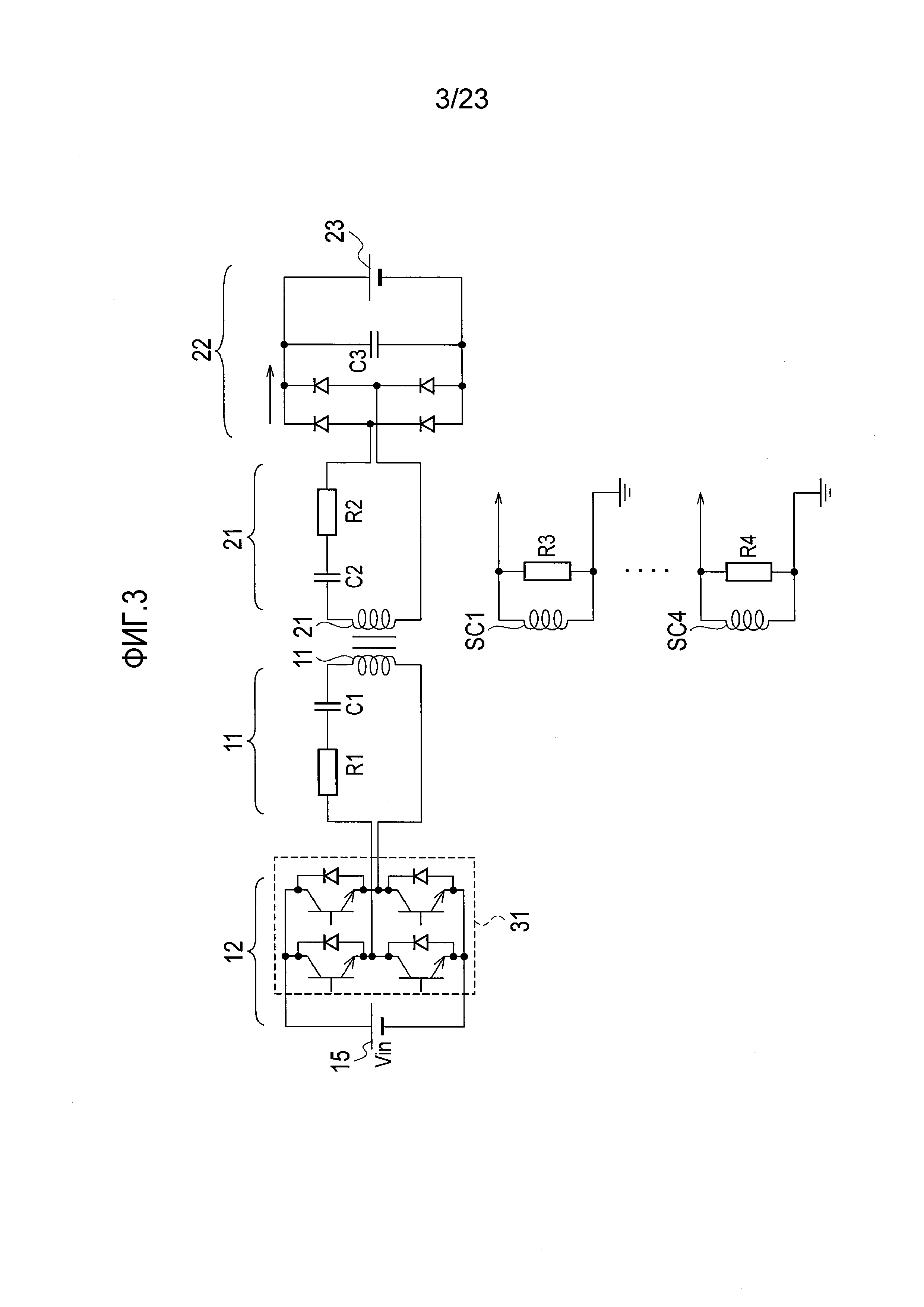
Фиг. 3 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии, подкатушек и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
Фиг. 4 является пояснительной схемой, показывающей компоновку катушки для приема энергии и подкатушек системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
Фиг. 5 является пояснительной схемой, показывающей строку данных сигнала спаривания, используемого в системе беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
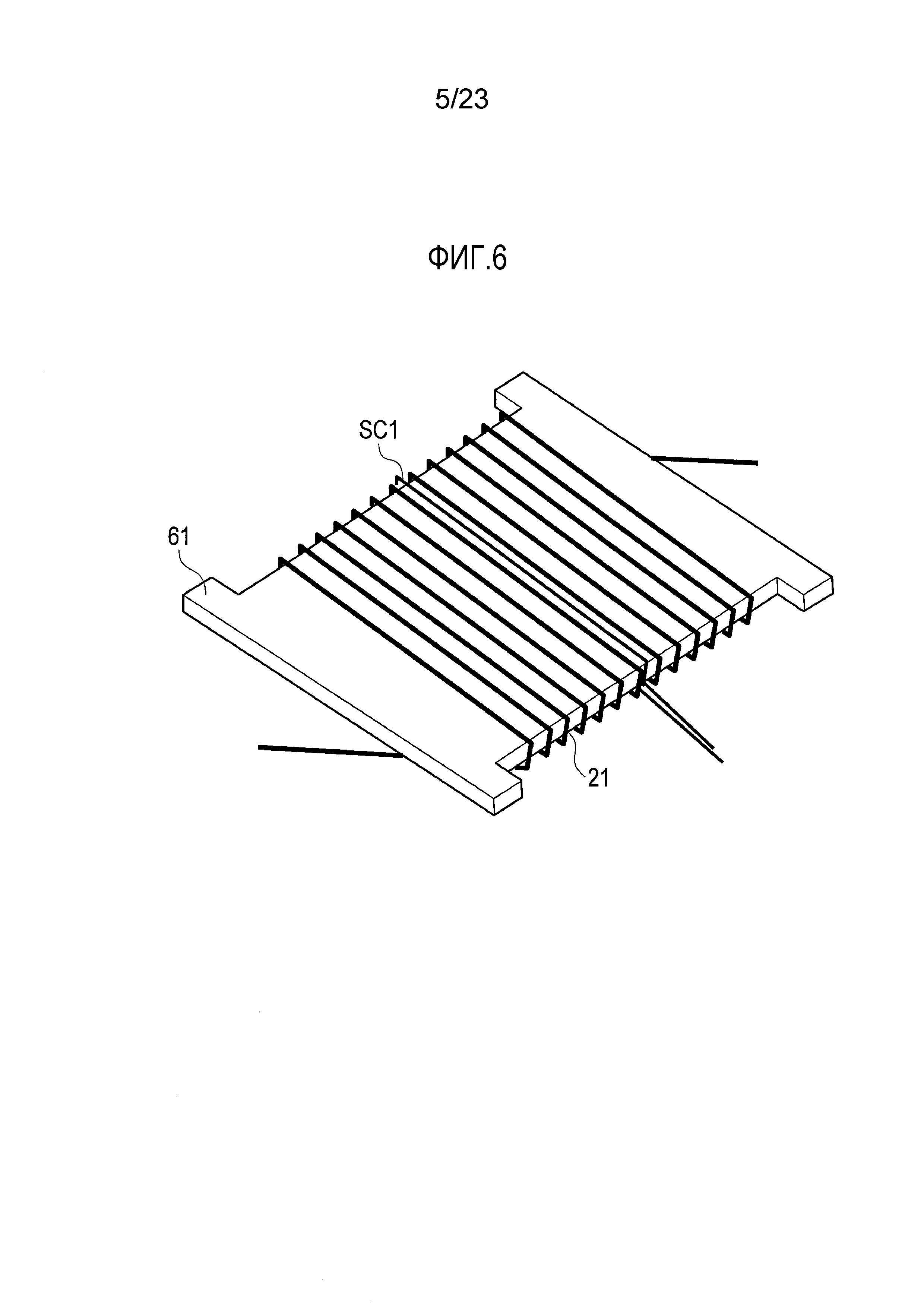
Фиг. 6 является видом в перспективе, показывающим конфигурацию катушки для приема энергии и одной из подкатушек, используемых в системе беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
Фиг. 7 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство приблизилось к одному из мест для парковки.
Фиг. 8 является набором схем формы сигнала согласно варианту осуществления настоящего изобретения, показывающих напряжение, принимаемое посредством одной из подкатушек, и идентификационные данные, полученные посредством подкатушки.
Фиг. 9 является первой частью блок-схемы последовательности операций способа, показывающей процедуру обработки посредством системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
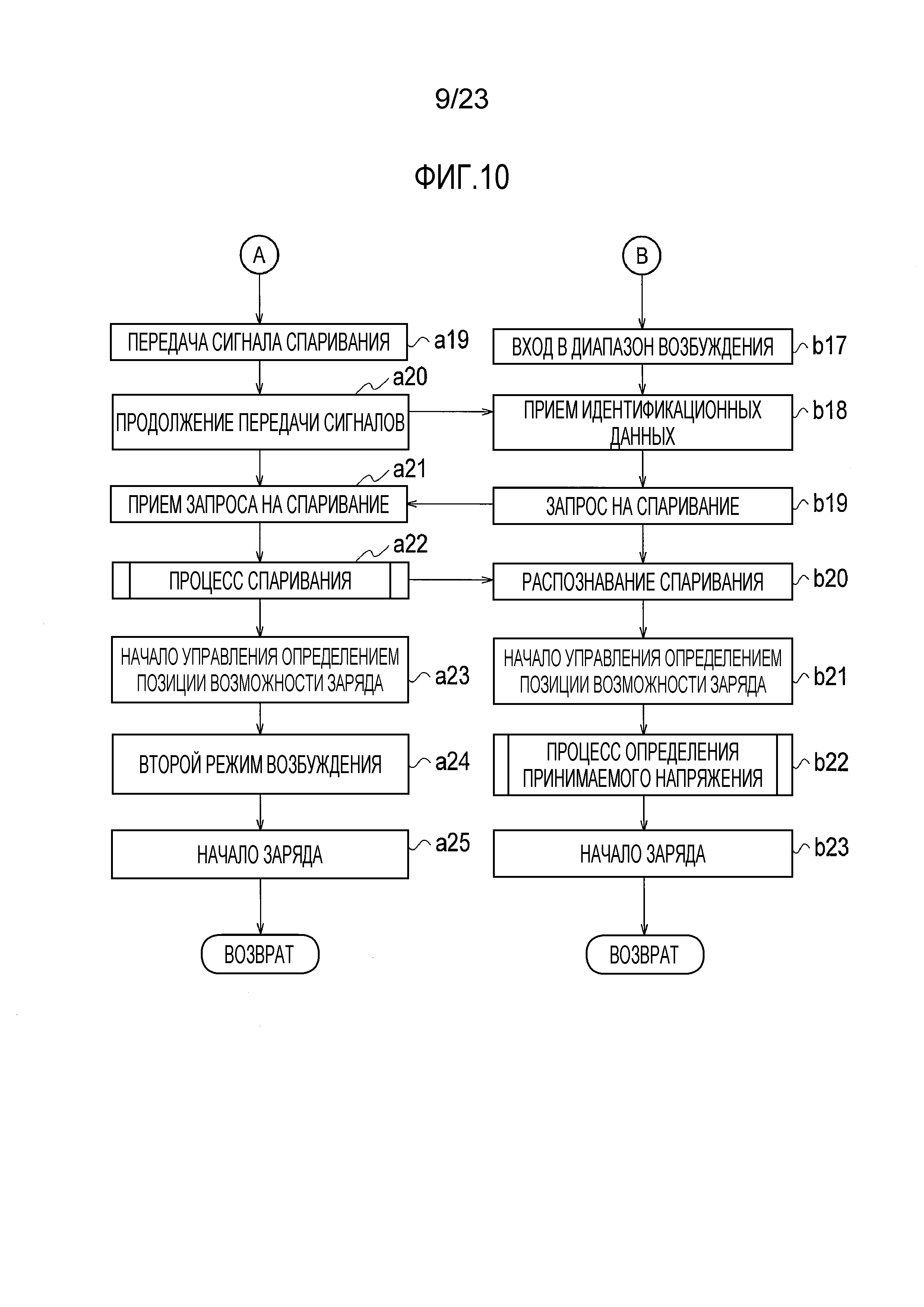
Фиг. 10 является второй частью блок-схемы последовательности операций способа, показывающей процедуру обработки посредством системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
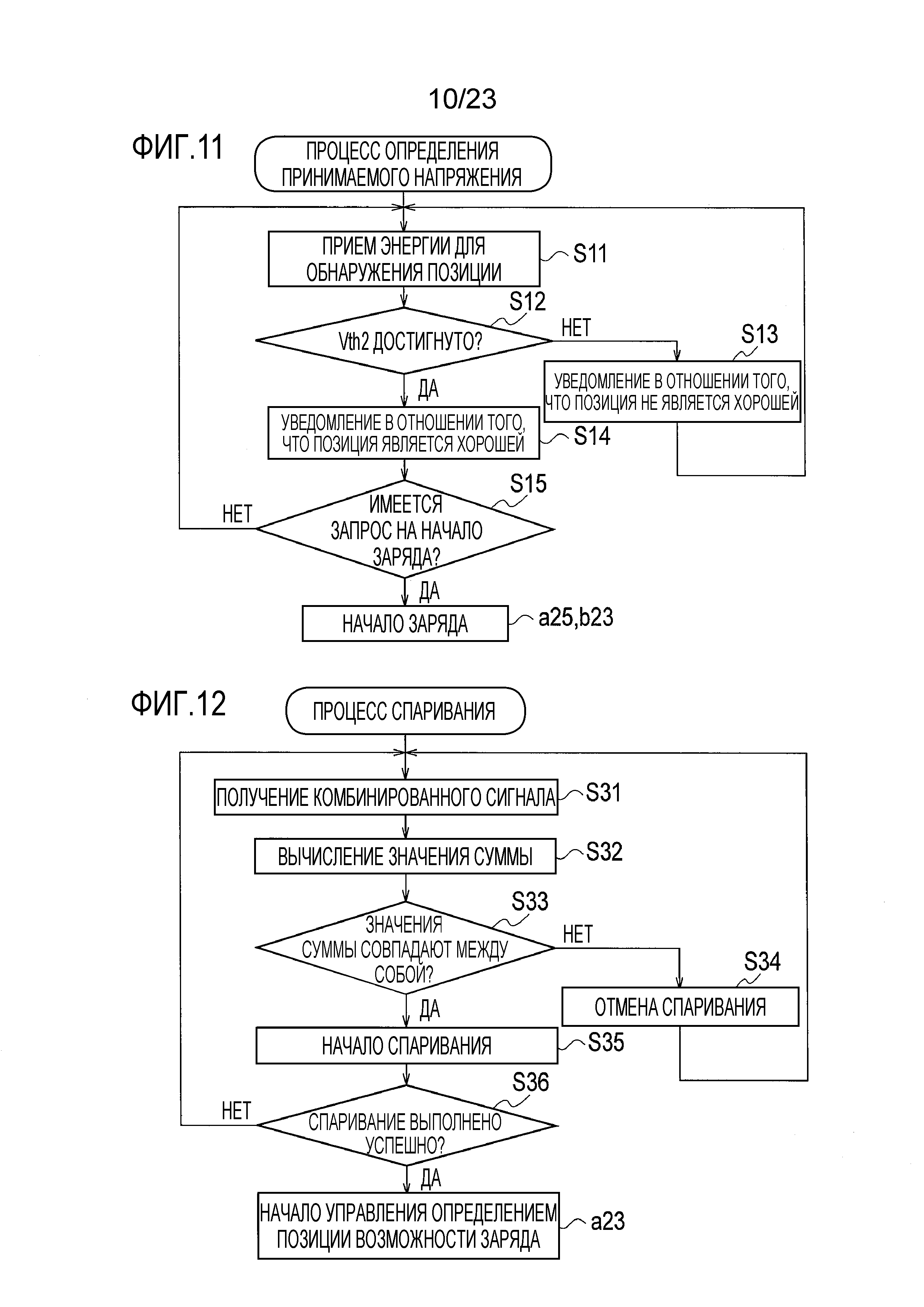
Фиг. 11 является блок-схемой последовательности операций способа, показывающей процедуру процесса определения принимаемого напряжения посредством системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
Фиг. 12 является блок-схемой последовательности операций способа, показывающей процедуру процесса спаривания посредством системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
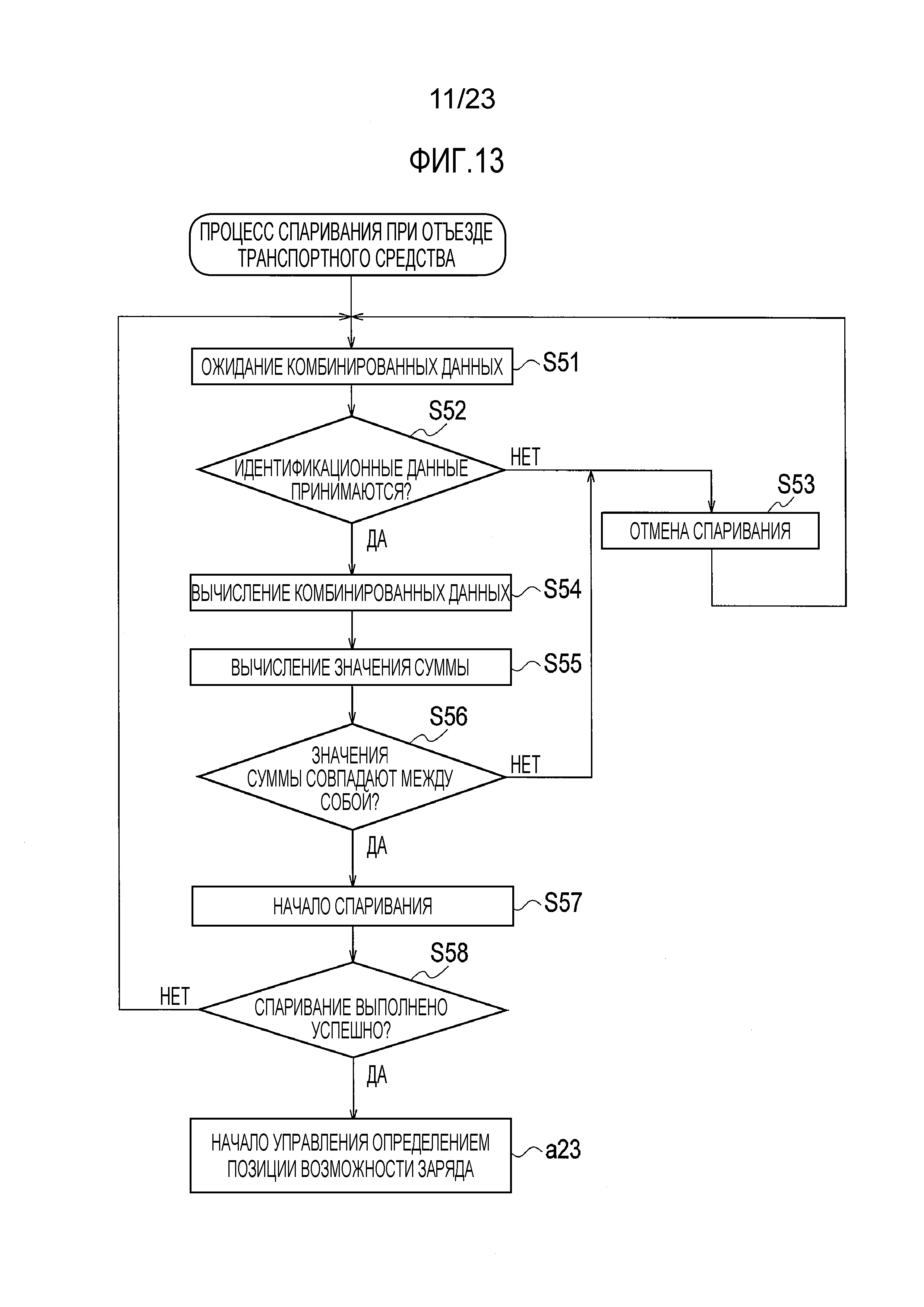
Фиг. 13 является блок-схемой последовательности операций способа, показывающей процедуру процесса спаривания при отъезде транспортного средства посредством системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
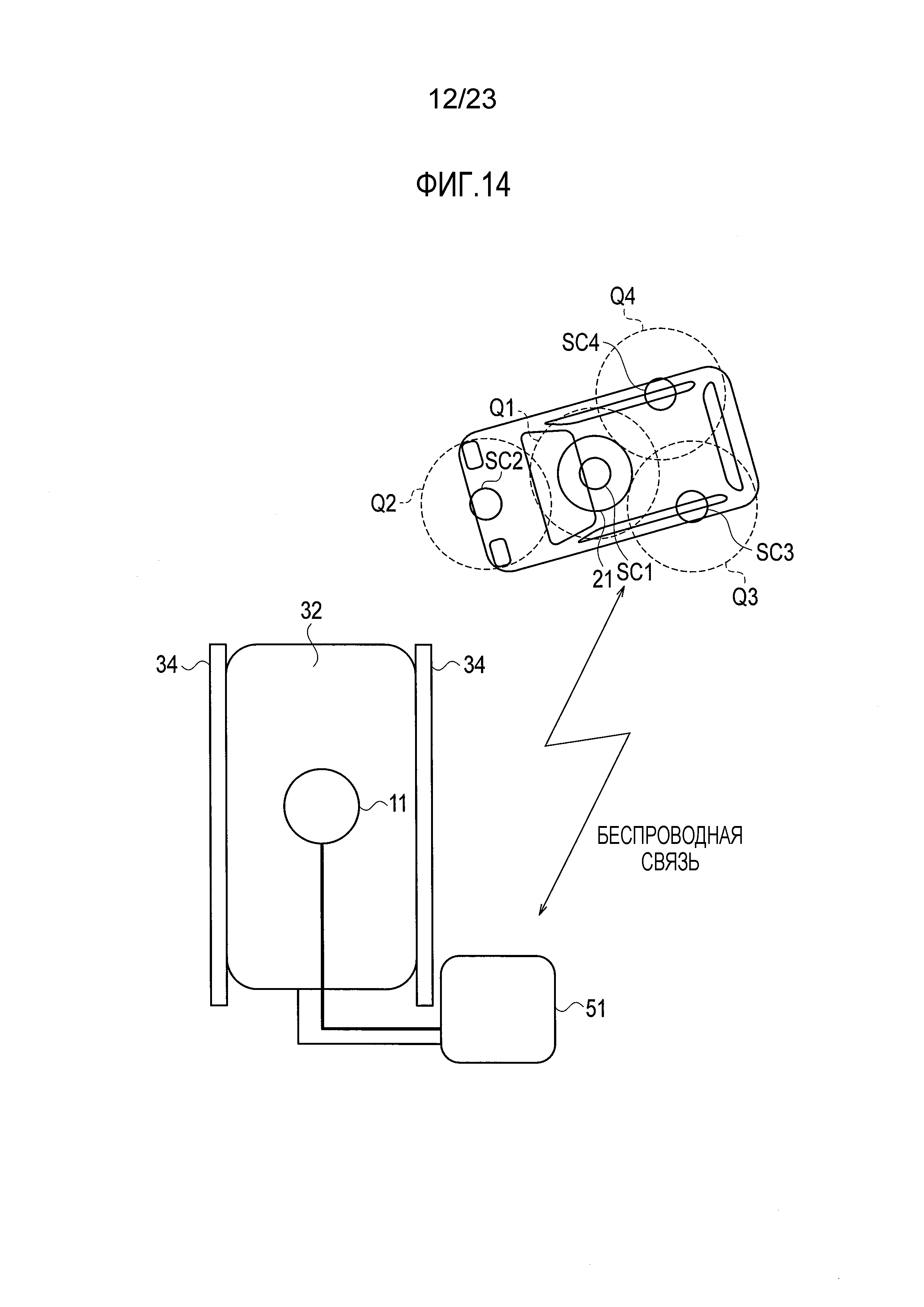
Фиг. 14 является пояснительной схемой согласно первому варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство приближается к одному из мест для парковки.
Фиг. 15 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство въезжает на место для парковки.
Фиг. 16 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство въехало на место для парковки.
Фиг. 17 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство остановлено в предварительно определенной позиции в месте для парковки.
Фиг. 18 является набором схем формы сигнала согласно варианту осуществления настоящего изобретения, показывающих напряжение для возбуждения катушки для передачи энергии и напряжение, принимаемое посредством одной из подкатушек.
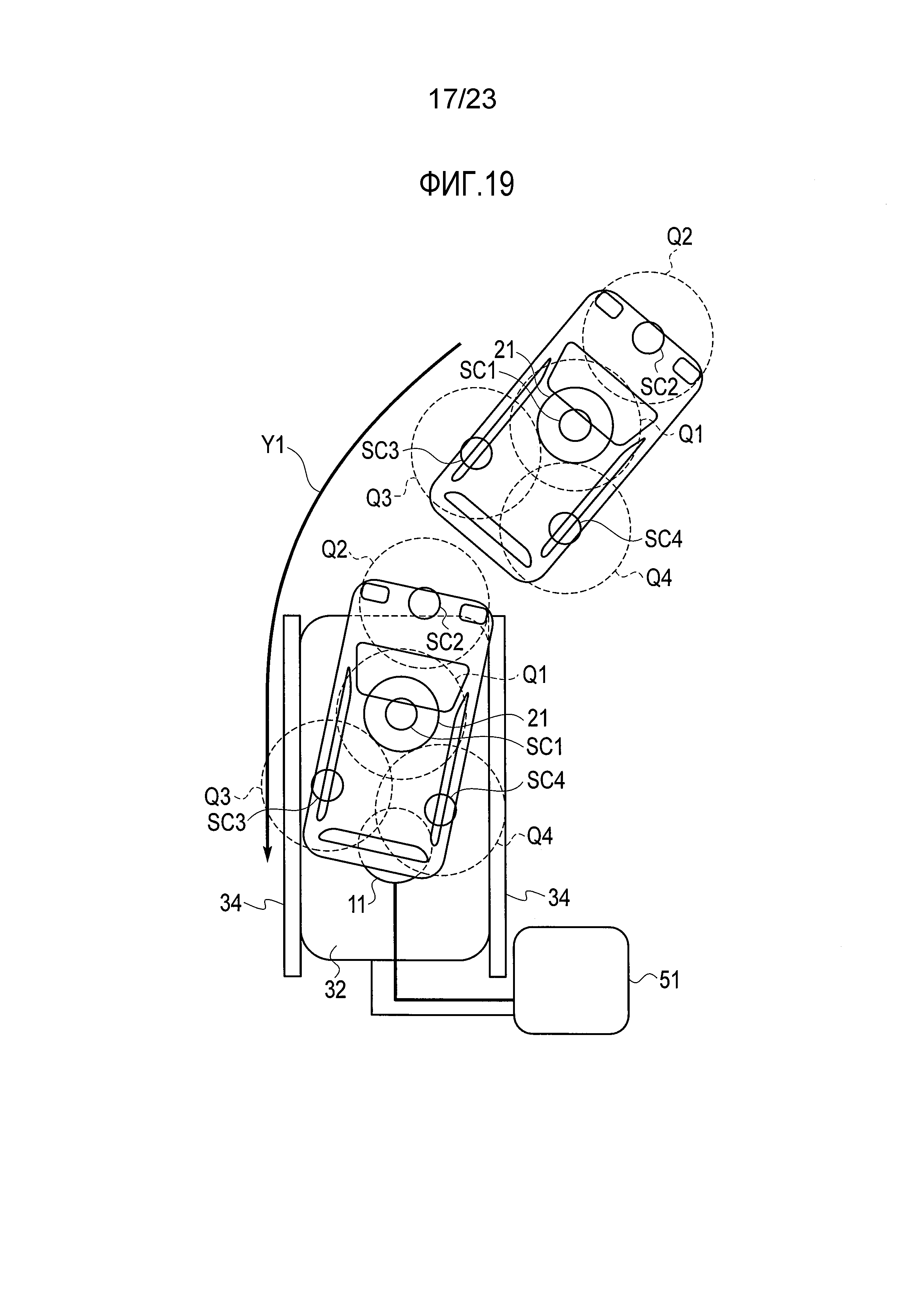
Фиг. 19 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором два смежных подкатушек принимают сигнал спаривания.
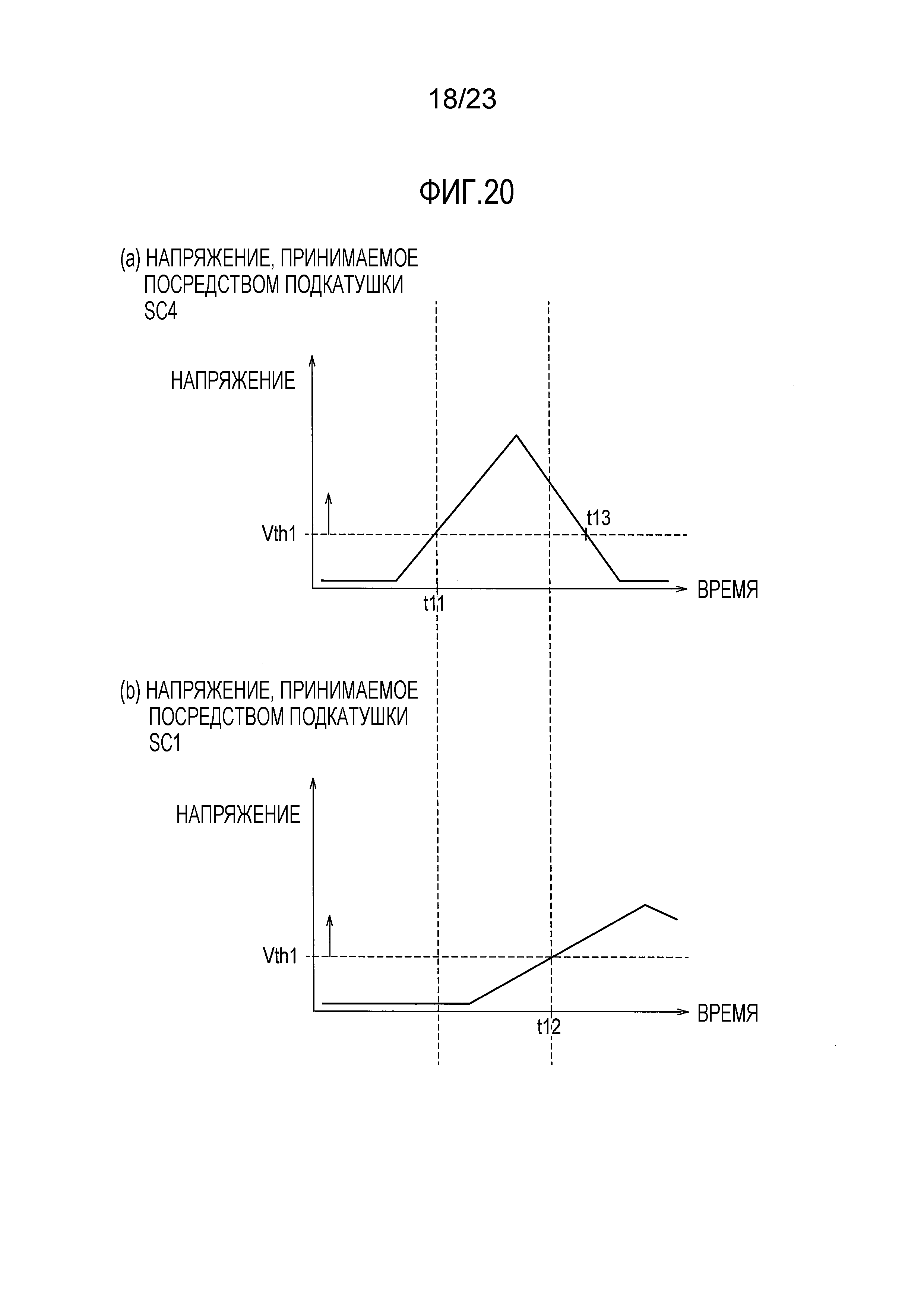
Фиг. 20 является набором схем формы сигнала согласно варианту осуществления настоящего изобретения, показывающих изменения напряжений, принимаемых посредством двух из подкатушек.
Фиг. 21 является набором схем формы сигнала согласно варианту осуществления настоящего изобретения, показывающих процедуру комбинирования фрагментов идентификационных данных, принимаемых посредством двух подкатушек, чтобы формировать комбинированные данные.
Фиг. 22 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей то, как комбинируются принимаемые сигналы, принимаемые посредством двух подкатушек.
Фиг. 23 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство въехало на два места для парковки таким образом, что оно перемещается между ними.
Фиг. 24 является набором схем формы сигнала согласно варианту осуществления настоящего изобретения, показывающих фрагменты принимаемых данных, принимаемых посредством двух из подкатушек, и комбинированных данных в ситуации, в которой фрагменты принимаемых данных отличаются друг от друга.
Фиг. 25 является пояснительной схемой согласно варианту осуществления настоящего изобретения, показывающей состояние, в котором транспортное средство отъехало от одного из мест для парковки.
Фиг. 26 является набором пояснительных схем, показывающих модификации компоновки подкатушек.
Подробное описание вариантов осуществления
[0009] Ниже поясняется вариант осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения. Как показано на фиг. 1, эта система беспроводной подачи энергии включает в себя множество устройств передачи энергии (два устройства 101, 101a передачи энергии показаны на фиг. 1 в качестве примера), предоставленных в парковочном оборудовании на земле, и устройство 102 приема энергии, смонтированное на транспортном средстве 20.
[0010] Устройство 101 передачи энергии включает в себя место для парковки для парковки транспортного средства 20. Устройство 101 передачи энергии также включает в себя наземный модуль 51, катушку 11 для передачи энергии, установленную на земле в месте для парковки, и датчик 33 обнаружения транспортных средств, выполненный с возможностью обнаруживать, когда транспортное средство 20 приближается к месту для парковки. Следует отметить, что фиг. 1 показывает два устройства 101, 101a передачи энергии в качестве примера. Настоящее изобретение не ограничено этим случаем, но является применимым к случаям, в которых предоставляются три или более устройств передачи энергии.
[0011] Наземный модуль 51 включает в себя: силовой модуль 12, выполненный с возможностью возбуждать катушку 11 для передачи энергии посредством обеспечения принудительного протекания тока протекать через нее; наземный контроллер 13 (модуль управления подачей энергии), выполненный с возможностью управлять приведением в действие силового модуля 12; и модуль 14 связи (модуль связи на стороне передачи энергии), выполненный с возможностью осуществлять беспроводную связь с устройством 102 приема энергии. Силовой модуль 12 осуществляет управление таким образом, что сигнал шаблона возбуждения, сформированный посредством возбуждения определенного шаблона, передается из катушки 11 для передачи энергии. Между тем, устройство 101a передачи энергии также имеет аналогичную конфигурацию и включает в себя наземный модуль 51a, катушку 11a для передачи энергии и датчик 33 обнаружения транспортных средств a. Следует отметить, что наземный контроллер 13 может состоять, например, из интегрированного компьютера, включающего в себя центральный процессор (CPU) и средство хранения, такое как RAM, ROM и жесткий диск.
[0012] Устройство 102 приема энергии, смонтированное на транспортном средстве 20, включает в себя катушку 21 для приема энергии, установленную в надлежащей позиции в днище транспортного средства 20, и выпрямляюще-сглаживающую схему 22, выполненную с возможностью выпрямлять и сглаживать переменное напряжение, принимаемое посредством катушки 21 для приема энергии. Устройство 102 приема энергии дополнительно включает в себя контроллер 24 транспортного средства (модуль управления приемом энергии), выполненный с возможностью управлять приведением в действие выпрямляюще-сглаживающей схемы 22, аккумулятор 23 (электрическую нагрузку), выполненный с возможностью заряжаться с помощью напряжения, принимаемого посредством катушки 21 для приема энергии, и модуль 25 связи (модуль связи на стороне приема энергии), выполненный с возможностью обмениваться данными с наземным модулем 51. Катушка 21 для приема энергии располагается в такой позиции, что она обращена к вышеуказанной катушке 11 для передачи энергии, когда транспортное средство 20 паркуется в предварительно определенной позиции в месте для парковки. Катушка 21 для приема энергии подает энергию, которую она принимает, в аккумулятор 23. Иными словами, катушка 21 для приема энергии подает принимаемую энергию в транспортное средство 20 в качестве движущей силы.
[0013] Устройство 102 приема энергии дополнительно включает в себя подкатушки SC1, SC2, SC3, SC4, установленные в днище транспортного средства 20. Эти подкатушки SC1-SC4 выполнены с возможностью принимать сигнал шаблона возбуждения, выведенный из катушки 11 для передачи энергии, и выводить его в контроллер 24 транспортного средства в то время, когда транспортное средство 20 перемещается, и до тех пор, пока транспортное средство 20 не будет остановлено в предварительно определенной позиции в месте для парковки. Ниже описывается компоновка подкатушек SC1-SC4. Следует отметить, что контроллер 24 транспортного средства может состоять, например, из интегрированного компьютера, включающего в себя центральный процессор (CPU) и модули хранения, такие как RAM, ROM и жесткий диск.
[0014] Фиг. 2 является пояснительной схемой, показывающей взаимосвязь между транспортным средством 20 и множеством мест 32, 32a для парковки. В этом варианте осуществления, процесс спаривания устройства 102 приема энергии, смонтированного на транспортном средстве 20, и устройства 101 передачи энергии, соответствующего месту 32 для парковки, в котором должно парковаться транспортное средство 20, выполняется через беспроводную связь между наземными модулями 51, 51,51a, предоставленными в местах 32, 32a для парковки, и устройством 102 приема энергии. В катушку 11 для передачи энергии устройства 101 передачи энергии после спаривания с транспортным средством 20 подается питание с тем, чтобы передавать энергию. Устройство 102 приема энергии принимает эту энергию и заряжает аккумулятор 23 (см. фиг. 1), смонтированный на транспортном средстве 20.
[0015] Фиг. 3 является принципиальной схемой, показывающей подробные конфигурации силового модуля 12, катушки 11 для передачи энергии, катушки 21 для приема энергии, выпрямляюще-сглаживающей схемы 22 и подкатушек SC1-SC4, которые показаны на фиг. 1, а также их периферийных элементов. Как показано на фиг. 3, силовой модуль 12 включает в себя схему 31 инвертора, сформированную из множества схем переключателя (к примеру, в качестве полупроводниковых элементов).
Более того, включение и выключение каждой схемы переключателя регулируется под управлением наземного контроллера 13 (см. фиг. 1), так что постоянное напряжение Vin, поданное из источника 15 энергии постоянного тока, преобразуется в переменное напряжение предварительно определенной частоты.
[0016] Резистор R1 и конденсатор C1 соединяются с катушкой 11 для передачи энергии. Посредством приложения переменного напряжения, выводимого из силового модуля 12, к катушке 11 для передачи энергии и за счет этого обеспечения принудительного протекания тока через нее, катушка 11 для передачи энергии может задаваться в одном из первого режима возбуждения, который является возбуждением для спаривания, которое описывается ниже, и второго режима возбуждения, который является возбуждением для позиционирования транспортного средства 20. Дополнительно, если катушка 11 для передачи энергии и катушка 21 для приема энергии расположены таким образом, что они обращены друг к другу, как показано на фиг. 1, катушка 11 для передачи энергии задается в третий режим возбуждения, которое является возбуждением для заряда аккумулятора, чтобы за счет этого передавать в беспроводном режиме энергию для заряда аккумулятора в катушку 21 для приема энергии.
[0017] Катушка 21 для приема энергии соединяется с конденсатором C2 и резистором R2 и принимает в беспроводном режиме энергию, передаваемую из катушки 11 для передачи энергии. Выпрямляюще-сглаживающая схема 22 включает в себя мостовую схему, сформированную из множества диодов и конденсатора C3. Выпрямляюще-сглаживающая схема 22 преобразует переменное напряжение, принимаемое посредством катушки 21 для приема энергии, в постоянное напряжение и дополнительно сглаживает его, а затем подает его в аккумулятор 23.
[0018] При приеме сигнала шаблона возбуждения, выведенного из катушки 11 для передачи энергии, подкатушки SC1-SC4 выводят этот сигнал шаблона возбуждения в контроллер 24 транспортного средства, показанный на фиг. 1. В частности, по мере того, как транспортное средство 20 въезжает на место 32 для парковки, по меньшей мере, одна из подкатушек SC1-SC4 приближается к катушке 11 для передачи энергии с перемещением транспортного средства 20, и подкатушка SC1-SC4 затем принимает сигнал шаблона возбуждения, выведенный из катушки 11 для передачи энергии, и выводит этот сигнал шаблона возбуждения в контроллер 24 транспортного средства.
[0019] Фиг. 4 является пояснительной схемой, показывающей компоновку из катушки 21 для приема энергии и подкатушек SC1-SC4, смонтированных в днище транспортного средства 20, и диапазон возможности приема сигналов каждой из подкатушек SC1-SC4. Как показано на фиг. 4, подкатушка SC2 предоставляется на передней стороне транспортного средства 20 относительно катушки 21 для приема энергии, и две подкатушки SC3, SC4 предоставляются на задней стороне транспортного средства 20 относительно катушки 21 для приема энергии. Дополнительно, подкатушка SC1 предоставляется в позиции, идентичной позиции катушки 21 для приема энергии. Подкатушка SC1 наматывается вокруг сердечника, идентичного сердечнику катушки 21 для приема энергии. В частности, как показано на фиг. 6, катушка 21 для приема энергии спирально наматывается вокруг ферритового сердечника 61 пластинчатой формы, и подкатушка SC1 также наматывается вокруг этого ферритового сердечника 61 в его практически центральной части.
[0020] Как показано на фиг. 4, диапазоны возможности приема сигналов подкатушек SC1, SC2, SC3, SC4 обозначаются посредством Q1, Q2, Q3, Q4, соответственно. Если какой-либо из диапазонов возможности приема сигналов расположен таким образом, что он перекрывает диапазон возбуждения катушки 11 для передачи энергии, сигнал шаблона возбуждения, выведенный из катушки 11 для передачи энергии, может приниматься. Здесь, диапазоны возможности приема сигналов этих подкатушек, смежных друг с другом, частично перекрывают друг друга. В частности, диапазоны Q1, Q2 возможности приема сигналов частично перекрывают друг друга. Аналогично, диапазоны Q1, Q3 возможности приема сигналов, диапазоны Q1, Q4 возможности приема сигналов и диапазоны Q3, Q4 возможности приема сигналов частично перекрывают друг друга. Причина частичного перекрытия между диапазонами возможности приема сигналов состоит в том, чтобы предотвращать разъединение связи сигнала шаблона возбуждения между катушкой 11 для передачи энергии и подкатушками SC1-SC4 в то время, когда транспортное средство 20 перемещается к предварительно определенной позиции в месте 32 для парковки.
[0021] В этом варианте осуществления, катушка 11 для передачи энергии задается в первый режим возбуждения, когда транспортное средство 20 приближается к месту 32 для парковки. В первом режиме возбуждения, как описано ниже, выводится сигнал шаблона возбуждения, содержащий сигнал спаривания. Затем спаривание выполняется между устройством 102 приема энергии и устройством 101 передачи энергии на основе сигнала спаривания, содержащегося в сигнале шаблона возбуждения, принимаемом посредством, по меньшей мере, одной из подкатушек SC1-SC4. Дополнительно, после того, как спаривание завершается, катушка 11 для передачи энергии задается во второй режим возбуждения, и то, паркуется или нет транспортное средство 20 в предварительно определенной позиции в месте 32 для парковки, определяется из интенсивности сигнала шаблона возбуждения, принимаемого посредством подкатушки SC1. После этого, если определено то, что транспортное средство 20 паркуется в предварительно определенной позиции в месте 32 для парковки, катушка 11 для передачи энергии задается в третий режим возбуждения для того, чтобы в беспроводном режиме подавать энергию.
[0022] Здесь, электрическая энергия, предоставляемая в катушку 11 для передачи энергии во втором режиме возбуждения, выше энергии, предоставляемой в катушку 11 для передачи энергии в первом режиме возбуждения. Это должно предотвращать ложное распознавание посредством контроллера 24 транспортного средства того, что катушка 11 для передачи энергии задается во второй режим возбуждения в то время, когда катушка 11 для передачи энергии задается в первый режим возбуждения.
[0023] Ниже описывается первый режим возбуждения в отношении строки данных, показанной на фиг. 5. В первом режиме возбуждения, катушка 11 для передачи энергии возбуждается в шаблоне, содержащем сигнал спаривания, сформированный из строки данных из стартового бита, идентификатора, кода длины данных, идентификационных данных, значения суммы и стопового бита. Таким образом, сигнал шаблона возбуждения, который должен выводиться из катушки 11 для передачи энергии, содержит сигнал спаривания, показанный на фиг. 5.
[0024] В идентификационных данных, содержащихся в сигнале спаривания, задается уникальная битовая строка, которая назначена соответствующему месту для парковки. Например, "1,0, 1, 0" задается в случае четырехбитовых данных. Наземный контроллер 13 управляет током, протекающим в катушку 11 для передачи энергии, таким образом, что может содержаться сигнал спаривания, показанный на фиг. 5. В общем, в первом режиме возбуждения, катушка 11 для передачи энергии возбуждается с помощью сигнала шаблона возбуждения, содержащего идентификационные данные.
[0025] Когда ток, модулированный с помощью строки данных сигнала спаривания, показанного на фиг. 5 протекает через катушку 11 для передачи энергии, сигнал спаривания принимается посредством подкатушки(ек) из числа подкатушек SC1-SC4, диапазон возможности приема сигналов которых перекрывает диапазон возбуждения катушки 11 для передачи энергии. Этот сигнал спаривания подается в контроллер 24 транспортного средства, показанный на фиг. 1.
[0026] Контроллер 24 транспортного средства считывает строку данных из сигнала спаривания, содержащегося в сигнале шаблона возбуждения, принимаемом посредством подкатушки(ек), и распознает идентификационные данные. Контроллер 24 транспортного средства затем передает распознанные идентификационные данные в модуль 14 связи через модуль 25 связи. Если идентификационные данные, передаваемые посредством катушки 11 для передачи энергии, и идентификационные данные, принимаемые посредством модуля 14 связи, совпадают между собой, наземный контроллер 13 спаривает это место для парковки и транспортное средство 20.
[0027] Между тем, если множество подкатушек из числа подкатушек SC1-SC4 принимает строки данных, эти строки данных подвергаются операции ИЛИ. Здесь, если строки данных, принимаемые посредством множества подкатушек, представляют собой сигнал спаривания, передаваемый из идентичной катушки 11 для передачи энергии, то осуществление операции ИЛИ с ними должно приводить к идентичной строке данных. В частности, если идентификационные данные, содержащиеся в сигнале спаривания, составляют "1, 0, 1, 0", и множество подкатушек принимают этот сигнал спаривания, то осуществление операции ИЛИ с идентификационными данными "1, 0, 1, 0", содержащимися в каждом сигнале спаривания, должно приводить к "1, 0, 1, 0". Таким образом, спаривание может выполняться с использованием этих идентификационных данных.
[0028] С другой стороны, если, например, идентификационные данные, содержащиеся в сигнале спаривания, принимаемом посредством подкатушки SC3, и идентификационные данные, содержащиеся в сигнале спаривания, принимаемом посредством подкатушки SC4, отличаются друг от друга, то осуществление операции ИЛИ с ними не должно приводить к идентичным идентификационным данным. Например, если идентификационные данные, содержащиеся в сигнале спаривания, принимаемом посредством подкатушки SC3, составляют "0, 1, 0, 1", тогда как идентификационные данные, содержащиеся в сигнале спаривания, принимаемом посредством подкатушки SC4, составляют "1, 0, 1, 0", то осуществление операции ИЛИ с ними должно приводить к "1, 1, 1, 1". Эти данные являются недопустимыми данными, и значение суммы, следовательно, указывает ошибку. Если значение суммы указывает ошибку, контроллер 24 транспортного средства отменяет спаривание. Ниже описываются подробности.
[0029] Далее приводится описание изменения напряжения, принимаемого посредством подкатушки SC2 (подкатушки, смонтированной на передней стороне транспортного средства 20), когда транспортное средство 20 движется вперед и въезжает на место 32 для парковки между линиями 34 разметки на парковке, в отношении пояснительной схемы, показанной на фиг. 7, и схем формы сигнала, показанных на фиг. 8. По мере того, как транспортное средство 20 въезжает на место 32 для парковки, и диапазон Q2 возможности приема сигналов подкатушки SC2 частично перекрывает диапазон возбуждения катушки 11 для передачи энергии, напряжение, принимаемое посредством подкатушки SC2, постепенно повышается со времени t0, а затем падает, как показано в части (a) по фиг. 8. После того, как напряжение, принимаемое посредством подкатушки SC2, превышает первое пороговое напряжение Vth1 во время t1, строка данных сигнала спаривания может распознаваться. В частности, как показано в части (b) по фиг. 8, строка данных сигнала спаривания, которая варьируется между "0" и "1", получается со времени t1. Спаривание затем может выполняться между транспортным средством 20 и местом 32 для парковки посредством использования этой строки данных.
[0030] Далее приводится описание работы от момента, когда транспортное средство 20 приближается к месту 32 для парковки, до момента, когда транспортное средство 20 останавливается в предварительно определенной позиции в месте 32 для парковки, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 9 и фиг. 10, и пояснительные схемы, показанные на фиг. 14-17.
[0031] Фиг. 14 показывает состояние, в котором транспортное средство 20 приближается к месту 32 для парковки между линиями 34 разметки на парковке. В этом состоянии, наземный контроллер 13 находится в состоянии ожидания (этап a11 на фиг. 9), и контроллер 24 транспортного средства приближается к месту 32 для парковки (этап b11). Затем контроллер 24 транспортного средства передает беспроводной сигнал, содержащий идентификатор транспортного средства, из модуля 25 связи через связь с использованием LAN (локальной вычислительной сети) и т.п. (этап b12).
[0032] При приеме этого беспроводного сигнала, модуль 14 связи наземного модуля 51 распознает то, что идентификатор транспортного средства, содержащийся в беспроводном сигнале, является допустимым идентификатором транспортного средства (этап a13). Затем наземный модуль 51 активируется (этап a14), и контроллер 24 транспортного средства уведомляется с помощью беспроводного сигнала в отношении того, что наземный модуль 51 активирован (этап a15).
[0033] Контроллер 24 транспортного средства уведомляет водителя транспортного средства 20 посредством дисплея (не показан) и т.п. в отношении того, что наземный модуль 51 активирован (этап b13). Таким образом, водитель может распознавать то, что наземный модуль 51 активирован. Контроллер 24 транспортного средства ожидает сигнала спаривания (этап b14).
[0034] После того, как наземный модуль 51 активируется, наземный контроллер 13 активирует датчик 33 обнаружения транспортных средств (этап a16). Наземный контроллер 13 ожидает приближения транспортного средства 20 (этап a17).
[0035] Когда часть транспортного средства 20 затем въезжает на место 32 для парковки между линиями разметки на парковке, как показано на фиг. 15 (этап b15), датчик 33 обнаружения транспортных средств обнаруживает въезд транспортного средства 20 на место 32 для парковки (этап a18). Наземный контроллер 13 задает катушку 11 для передачи энергии в первый режим возбуждения посредством использования сигнала шаблона возбуждения, содержащего сигнал спаривания (этап a19 на фиг. 10). Дополнительно, наземный контроллер 13 продолжает первый режим возбуждения (этап a20). В этот момент контроллер 24 транспортного средства ожидает сигнала спаривания (этап b16).
[0036] Затем, как показано на фиг. 16, транспортное средство 20 приближается к катушке 11 для передачи энергии в месте 32 для парковки, и диапазон Q4 возможности приема сигналов подкатушки SC4 достигает такой позиции, что он перекрывает диапазон возбуждения катушки 11 для передачи энергии (этап b17). В качестве результата, подкатушка SC4 принимает сигнал спаривания, и контроллер 24 транспортного средства распознает идентификационные данные, содержащиеся в этом сигнале спаривания (этап b18).
[0037] Контроллер 24 транспортного средства передает распознанные идентификационные данные через модуль 25 связи, чтобы запрашивать наземный контроллер 13 на предмет выполнения спаривания (этап b19). При приеме идентификационных данных (этап a21), наземный контроллер 13 определяет то, совпадают или нет идентификационные данные, содержащиеся в сигнале спаривания, передаваемом посредством первого режима возбуждения, и идентификационные данные, передаваемые из контроллера 24 транспортного средства, между собой. Если они совпадают между собой, устройство 102 приема энергии и устройство 101 передачи энергии спариваются между собой (этап a22). Далее описываются сведения по процессу спаривания. Затем наземный контроллер 13 начинает управление определением позиции возможности заряда (этап a23).
[0038] Контроллер 24 транспортного средства распознает то, что спаривание выполнено (этап b20), и начинает управление определением позиции возможности заряда (этап b21).
[0039] Наземный контроллер 13 управляет током, протекающим в катушку 11 для передачи энергии, таким образом, что катушка 11 для передачи энергии может задаваться во второй режим возбуждения (этап a24). Затем наземный контроллер 13 переключается на беспроводной заряд (этап a25). Контроллер 24 транспортного средства определяет уровень напряжения, принимаемого посредством подкатушки SC1, предоставленной около катушки 21 для приема энергии (этап b22). Ниже описываются подробности этого процесса определения принимаемого напряжения.
[0040] Затем контроллер 24 транспортного средства переключается на беспроводной заряд (этап b23), если транспортное средство 20 остановлено в предварительно определенной позиции в месте 32 для парковки, т.е. если транспортное средство 20 достигает такой позиции, что катушка 11 для передачи энергии и катушка 21 для приема энергии обращены друг к другу, как показано на фиг. 17.
[0041] Далее описывается подробная процедура процесса определения принимаемого напряжения, показанного на этапе b22 на фиг. 10, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 11. Когда процесс определения принимаемого напряжения начинается, наземный контроллер 13 задает катушку 11 для передачи энергии во второй режим возбуждения. В частности, наземный контроллер 13 возбуждает катушку 11 для передачи энергии с напряжением, превышающим напряжение в вышеуказанном первом режиме возбуждения, и передает энергию из этой катушки 11 для передачи энергии.
[0042] На этапе S11 на фиг. 11, подкатушка SC1, предоставленная посредством катушки 21 для приема энергии, принимает энергию, вырабатываемую посредством второго режима возбуждения. Затем контроллер 24 транспортного средства определяет то, достигло или нет напряжение этой энергии предварительно установленного второго порогового напряжения Vth2 (>Vth1).
[0043] Если напряжение еще не достигло второго порогового напряжения Vth2 ("Нет" на этапе S12), контроллер 24 транспортного средства определяет то, что позиция остановки транспортного средства 20 еще не достигла предварительно определенной позиции, уведомляет водителя соответствующим образом на этапе S13 и возвращает процесс на этап S11.
[0044] С другой стороны, если напряжение, принимаемое посредством подкатушки SC1, достигало порогового напряжения Vth2 ("Да" на этапе S12), контроллер 24 транспортного средства определяет то, что транспортное средство 20 достигло предварительно определенной позиции. Затем на этапе S14 контроллер 24 транспортного средства уведомляет водителя в отношении того, что позиция остановки транспортного средства достигла позиции возможности заряда, посредством отображения этой информации на дисплее (не показан) и т.п. Смотря на этот дисплей, водитель останавливает транспортное средство 20.
[0045] Другими словами, чем больше область перекрытия между катушкой 11 для передачи энергии и подкатушкой SC1, тем больше напряжение, принимаемое посредством подкатушки SC1. Таким образом, посредством мониторинга напряжения, принимаемого посредством подкатушки SC1, можно определять то, остановлено или нет транспортное средство 20 в предварительно определенной позиции (позиции возможности заряда) в месте 32 для парковки.
[0046] На этапе S15, контроллер 24 транспортного средства определяет то, вводит или нет водитель запрос на начало заряда. Если водитель вводит запрос на начало заряда ("Да" на этапе S15), заряд аккумулятора 23 начинается на этапах a25, b23.
[0047] Ниже описывается вышеуказанная обработка со ссылкой на части (a), (b) по фиг. 18. Часть (a) по фиг. 18 является схемой формы сигнала, показывающей изменение напряжения для возбуждения катушки 11 для передачи энергии, в то время как часть (b) по фиг. 18 является схемой формы сигнала, показывающей изменение напряжения, принимаемого посредством подкатушки SC1. Во время t0, показанное в части (a) по фиг. 18, катушка 11 для передачи энергии задается в первый режим возбуждения. В частности, катушка 11 для передачи энергии возбуждается с помощью сигнала шаблона возбуждения, содержащего сигнал спаривания. Как показано в части (b) по фиг. 18, подкатушка SC1 принимает сигнал спаривания во время t0, и интенсивность принимаемого сигнала еще более повышается, так что спаривание выполняется во время t1. Затем во время t2, катушка 11 для передачи энергии переключается с первого режима возбуждения на второй режим возбуждения. Поскольку транспортное средство 20 перемещается относительно места 32 для парковки, напряжение, принимаемое посредством катушки 21 для приема энергии, варьируется, как показано в части (b) по фиг. 18. Когда принимаемое напряжение затем достигает предварительно установленного второго порогового напряжения Vth2, определяется то, что транспортное средство 20 достигает позиции возможности заряда.
[0048] В этом варианте осуществления приведено описание примера, в котором то, остановлено или нет транспортное средство 20 в позиции возможности заряда, определяется на основе уровня напряжения, принимаемого посредством подкатушки SC1. Тем не менее, следует отметить, что настоящее изобретение не ограничено этим примером. То, остановлено или нет транспортное средство 20 в позиции возможности заряда, также может определяться на основе уровня напряжения, принимаемого посредством катушки 21 для приема энергии.
[0049] Далее описывается подробная процедура процесса спаривания, показанного на этапе a22 на фиг. 10, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 12.
[0050] Во-первых, на этапе S31, если какая-либо из подкатушек SC1-SC4 принимает сигнал спаривания, контроллер 24 транспортного средства получает идентификационные данные из сигнала спаривания. Здесь, если две или более подкатушек принимают сигналы спаривания, контроллер 24 транспортного средства получает комбинированные данные, в которых фрагменты идентификационных данных, содержащих сигналы спаривания, принимаемые посредством подкатушек, комбинируются друг с другом.
[0051] Ниже описывается способ формирования комбинированных данных в отношении пояснительной схемы, показанной на фиг. 19, и схем формы сигнала, показанных на фиг. 20 и фиг. 21. Фиг. 19 является пояснительной схемой, показывающей позиционную взаимосвязь в состоянии, в котором транспортное средство 20 въезжает на место 32 для парковки. Фиг. 20 является набором схем формы сигнала, показывающих сигналы, принимаемые посредством двух подкатушек SC4, SC1. Как показано на фиг. 19, по мере того, как транспортное средство 20 въезжает на место 32 для парковки посредством перемещения назад, как указано посредством стрелки Y1 на чертеже, диапазон Q4 возможности приема сигналов подкатушки SC4 сначала перекрывает диапазон возбуждения катушки 11 для передачи энергии. Соответственно, как показано в части (a) по фиг. 20, напряжение, принимаемое посредством подкатушки SC4, постепенно повышается и достигает первого порогового напряжения Vth1, т.е. напряжения, которое обеспечивает возможность связи примерно во время t11. По мере того, как транспортное средство 20 въезжает дальше на место 32 для парковки, диапазон Q4 возможности приема сигналов подкатушки SC4 постепенно отдаляется от катушки 11 для передачи энергии, и следовательно, напряжение, принимаемое посредством подкатушки SC4, начинает падать.
[0052] С другой стороны, диапазон Q1 возможности приема сигналов подкатушки SC1, которая наматывается вокруг сердечника, идентичного сердечнику катушки 21 для приема энергии (ферритового сердечника 61 на фиг. 6), перекрывает диапазон возбуждения катушки 11 для передачи энергии после диапазона Q4 возможности приема сигналов. Следовательно, как показано часть (b) по фиг. 20, принимаемое напряжение достигает первого порогового напряжения Vth1 во время t12. Здесь, поскольку диапазоны Q1, Q4 возможности приема сигналов частично перекрывают друг друга, напряжение, принимаемое посредством подкатушки SC1, превышает первое пороговое напряжение Vth1 во время t12, которое находится перед временем t13, в которое напряжение, принимаемое посредством подкатушки SC4, опускается ниже первого порогового напряжения Vth1. Таким образом, связь с катушкой 11 для передачи энергии может переопределяться от подкатушки SC4 на подкатушку SC1, и в силу этого можно не допускать разъединения связи в середине.
[0053] Это применяется не только к подкатушкам SC4, SC1. Подкатушки SC1, SC2, подкатушки SC1, SC3 и подкатушки SC3, SC4, т.е. подкатушки, смежные друг с другом, имеют свои диапазоны возможности приема сигналов, частично перекрывающие друг друга. Следовательно, можно не допускать разъединения связи в середине между смежными подкатушками.
[0054] Между тем, как показано в части (a) по фиг. 20, подкатушка SC4 может получать идентификационные данные, которые варьируются между "0" и "1" в период времени, в который ее принимаемое напряжение выше первого порогового напряжения Vth1 (t11 в t13). Следовательно, как показано в части (a) по фиг. 21, идентификационные данные получаются в период времени от времени t11 до времени t13. С другой стороны, как показано в части (b) по фиг. 20, напряжение, принимаемое посредством подкатушки SC1, достигает порогового напряжения Vth1 во время t12, и подкатушка SC1, следовательно, может получать идентификационные данные во время и после времени t12. Следовательно, идентификационные данные получаются так, как показано в части (b) по фиг. 21. Контроллер 24 транспортного средства комбинирует оба фрагмента идентификационных данных с тем, чтобы формировать комбинированные данные. В частности, контроллер 24 транспортного средства формирует комбинированные данные посредством осуществления операции ИЛИ с идентификационными данными, полученными посредством подкатушки SC4 (формой сигнала в части (a) по фиг. 21), и идентификационными данными, полученными посредством подкатушки SC1 (формой сигнала в части (b) по фиг. 21). Как результат, получаются комбинированные данные, показанные в части (c) по фиг. 21.
В этом варианте осуществления, приведено описание примера, в котором комбинированные данные формируются посредством осуществления операции ИЛИ с двумя фрагментами идентификационных данных, как показано в частях (a)-(c) по фиг. 21. Тем не менее, следует отметить, что комбинированные данные могут формироваться из сигнала, получаемого посредством наложения двух фрагментов идентификационных данных. Например, как показано на фиг. 22, в случае если подкатушка SC4 принимает сигнал, указываемый посредством кривой q13, и подкатушка SC1 принимает сигнал, указываемый посредством кривой q12, сигнал q11, полученный посредством комбинирования этих принимаемых сигналов q12, q13, может представлять собой комбинированные данные. В частности, посредством нахождения большего из принимаемых сигналов q12, q13 можно получать комбинированные данные, аналогичные комбинированным данным, полученным посредством осуществления операции ИЛИ.
[0055] На этапе S32, показанном на фиг. 12, контроллер 24 транспортного средства вычисляет значение суммы комбинированных данных. Затем на этапе S33, определяется то, совпадает или нет значение суммы, полученное на этапе S32, со значением суммы идентификационных данных, передаваемых из катушки 11 для передачи энергии. Если значения суммы не совпадают между собой ("Нет" на этапе S33), спаривание не выполняется. Если спаривание уже выполнено, это спаривание отменяется на этапе S34. После этого процесс возвращается к этапу S31.
[0056] С другой стороны, если значения суммы совпадают между собой ("Да" на этапе S33), контроллер 24 транспортного средства начинает спаривание на этапе S35. В этой обработке, строка данных для комбинированных данных и строка данных для идентификационных данных, передаваемых из катушки 11 для передачи энергии, сравниваются друг с другом, и устройство 102 приема энергии транспортного средства 20 и устройство 101 передачи энергии спариваются между собой, если две строки данных совпадают между собой. В частности, если, например, строка данных для комбинированных данных составляет "1, 0, 1, 0", а строка данных для идентификационных данных, передаваемых из катушки 11 для передачи энергии, составляет "1, 0, 1, 0", две строки данных совпадают между собой, и устройство 102 приема энергии и устройство 101 передачи энергии, следовательно, спариваются между собой.
[0057] На этапе S36, контроллер 24 транспортного средства определяет то, выполнено или нет успешно спаривание. Если спаривание не выполнено успешно ("Нет" на этапе S36), процесс возвращается к этапу S31. Если спаривание выполнено успешно ("Да" на этапе S36), управление определением позиции возможности заряда начинается на этапе a23.
[0058] Далее приводится подробное описание случая, в котором комбинированные данные, полученные посредством контроллера 24 транспортного средства, и идентификационные данные, передаваемые из наземного контроллера 13, совпадают между собой, и случая, в котором они не совпадают между собой. Если транспортное средство 20 надлежащим образом въезжает на место 32 для парковки между линиями 34 разметки на парковке, как показано на фиг. 19, идентификационные данные, полученные посредством каждой из подкатушек SC1-SC4, являются идентичными идентификационным данным, передаваемым из катушки 11 для передачи энергии.
[0059] Затем если комбинированные данные формируются посредством осуществления операции ИЛИ с фрагментами идентификационных данных, полученных посредством подкатушек SC1-SC4, эти комбинированные данные совпадают с идентификационными данными, передаваемыми из наземного контроллера 13. В частности, как описано в отношении частей (a)-(c) по фиг. 21, если комбинированные данные формируются посредством комбинирования идентификационных данных, принимаемых посредством подкатушки SC4, и идентификационных данных, принимаемых посредством подкатушки SC1, эти комбинированные данные совпадают с идентификационными данными, передаваемыми из катушки 11 для передачи энергии. Таким образом, при обработке этапа S33 на фиг. 12, определяется, что значение суммы комбинированных данных совпадает с другим и, следовательно, спаривание выполняется с использованием этих комбинированных данных.
[0060] Если фрагменты идентификационных данных, полученных посредством подкатушек SC1-SC4, не совпадают между собой, идентификационные данные, передаваемые из катушки 11 для передачи энергии, и комбинированные данные фрагментов идентификационных данных, принимаемых посредством подкатушек SC1-SC4, не совпадают между собой, что означает ошибку. Это описывается в отношении пояснительной схемы, показанной на фиг. 23, и схем формы сигнала, показанных на фиг. 24.
[0061] Рассмотрим случай, в котором транспортное средство 20 въезжает на два места 32, 32a для парковки таким образом, что оно перемещается между ними, как показано на фиг. 23. В этом случае, подкатушка SC3 принимает сигнал спаривания, передаваемый из катушки 11 для передачи энергии в месте 32 для парковки, тогда как подкатушка SC4 принимает сигнал спаривания, передаваемый из катушки 11a для передачи энергии в месте 32a для парковки. Следовательно, идентификационные данные, полученные посредством подкатушки SC3, отображаются в качестве формы сигнала, показанной в части (a) по фиг. 24, тогда как идентификационные данные, полученные посредством подкатушки SC4, отображаются в качестве формы сигнала, показанной в части (b) по фиг. 24.
[0062] Поскольку два форм сигналов отличаются друг от друга, комбинированные данные, сформированные посредством осуществления операции ИЛИ с ними, имеют недопустимую форму сигнала, как показано в части (c) по фиг. 24. Следовательно, при обработке на этапе S33 на фиг. 12 определяется то, что значения суммы не совпадают между собой, и спаривание отменяется.
[0063] В общем, если транспортное средство 20 въезжает на два места 32, 32a для парковки таким образом, что оно перемещается между ними, как показано на фиг. 23, спаривание не выполняется ни с одним из мест 32, 32a для парковки. Таким образом, водитель транспортного средства 20 перемещает транспортное средство 20 и выполняет операцию въезда на требуемое место для парковки.
[0064] Фиг. 23 показывает пример, в котором спаривание отменяется, если фрагменты идентификационных данных, полученных посредством подкатушки SC3 и подкатушки SC4, предоставленных на задней стороне относительно катушки 21 для приема энергии, отличаются друг от друга. Тем не менее, следует отметить, что спаривание также отменяется, если идентификационные данные отличаются между подкатушкой SC2, предоставленной на передней стороне относительно катушки 21 для приема энергии, и подкатушкой SC3 или SC4, предоставленной на задней стороне. Иными словами, система беспроводной подачи энергии согласно этому варианту осуществления отменяет спаривание, если идентификационные данные, принимаемые посредством подкатушки, предоставленной на передней стороне относительно катушки 21 для приема энергии, и идентификационные данные, принимаемые посредством любой из подкатушек, предоставленных на задней стороне относительно катушки 21 для приема энергии, отличаются друг от друга.
[0065] Дополнительно, множество фрагментов идентификационных данных может не комбинироваться; фрагменты идентификационных данных, полученных посредством подкатушек SC1-SC4, могут сравниваться друг с другом, и спаривание может отменяться, если, по меньшей мере, один из фрагментов идентификационных данных отличается от других фрагментов идентификационных данных.
[0066] Далее приводится описание операции, в ситуации, в которой спаривание выполняется между устройством 102 приема энергии и устройством 101 передачи энергии, но транспортное средство 20 затем отъезжает из места 32 для парковки, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 13, и пояснительную схему, показанную на фиг. 25. Эта операция выполняется в ситуации, в которой спаривание завершается между транспортным средством 20 и местом 32 для парковки, но транспортное средство 20 затем отъезжает из места 32 для парковки без заряда аккумулятора 23, и в других аналогичных ситуациях.
[0067] Во-первых, на этапе S51 на фиг. 13 контроллер 24 транспортного средства ожидает комбинированные данные. На этапе S52, контроллер 24 транспортного средства определяет то, подкатушки SC1-SC4 принимают сигналы спаривания и получают фрагменты идентификационных данных или нет. Если идентификационные данные не получаются в течение определенного периода времени ("Нет" на этапе S52), спаривание отменяется на этапе S53. После этого процесс возвращается к этапу S51.
[0068] С другой стороны, если фрагменты идентификационных данных получаются ("Да" на этапе S52), контроллер 24 транспортного средства формирует комбинированные данные на этапе S54 посредством осуществления операции ИЛИ с фрагментами идентификационных данных, полученных посредством подкатушек.
[0069] На этапе S55, контроллер 24 транспортного средства вычисляет значение суммы комбинированных данных, сформированных таким способом. Дополнительно на этапе S56, определяется то, совпадает или нет значение суммы со значением суммы идентификационных данных, содержащихся в сигнале спаривания, передаваемом из наземного контроллера 13.
[0070] Затем если значения суммы не совпадают между собой ("Нет" на этапе S56), спаривание отменяется на этапе S53. С другой стороны, если значения суммы совпадают между собой ("Да" на этапе S56), контроллер 24 транспортного средства начинает спаривание на этапе S57. На этапе S58, контроллер 24 транспортного средства определяет то, выполнено или нет успешно спаривание. Если спаривание выполнено успешно, управление определением позиции возможности заряда начинается на этапе a23 (см. фиг. 10).
[0071] Как описано выше, если транспортное средство 20 отъезжает из места 32 для парковки, спаривание отменяется, как только связь между подкатушками SC1-SC4 и катушкой 11 для передачи энергии разъединяется.
[0072] Как описано выше, в системе беспроводной подачи энергии согласно этому варианту осуществления, множество подкатушек SC1-SC4 монтируется в днище транспортного средства 20. Дополнительно, по мере того, как транспортное средство 20 приближается к месту 32 для парковки, катушка 11 для передачи энергии задается в первый режим возбуждения и передает сигнал спаривания. Кроме того, когда, по меньшей мере, одна из подкатушек SC1-SC4 принимает этот сигнал спаривания, определяется то, совпадают или нет идентификационные данные, содержащиеся в этом сигнале спаривания, и идентификационные данные, содержащиеся в сигнале спаривания, передаваемом из катушки 11 для передачи энергии, между собой. Если они совпадают между собой, устройство 102 приема энергии, смонтированное на этом транспортном средстве 20, и устройство 101 передачи энергии спариваются между собой.
[0073] Таким образом, транспортное средство 20 и место 32 для парковки могут спариваться друг с другом до того, как транспортное средство 20 останавливается в предварительно определенной позиции в месте 32 для парковки. Следовательно, можно быстро выполнять управление определением позиции возможности заряда и беспроводным зарядом, которые выполняются после спаривания.
[0074] Кроме того, по меньшей мере, одна подкатушка монтируется на каждой из передней стороны и задней стороны относительно катушки 21 для приема энергии. В частности, подкатушка SC2 монтируется на передней стороне относительно катушки 21 для приема энергии, и подкатушки SC3, SC4 монтируются на задней стороне относительно катушки 21 для приема энергии. Таким образом, идентификационные данные, передаваемые из катушки 11 для передачи энергии, могут приниматься посредством любой из подкатушек как в случае, в котором транспортное средство 20 приближается к месту 32 для парковки посредством движения вперед, так и в случае, в котором транспортное средство 20 приближается к месту 32 для парковки посредством движения назад.
[0075] Дополнительно, две или более подкатушек предоставляются, по меньшей мере, на одной из передней стороны и задней стороны относительно катушки 21 для приема энергии. В частности, две подкатушки SC3, SC4 предоставляются на задней стороне относительно катушки 21 для приема энергии. Таким образом, как только спаривание устанавливается, можно продолжать прием сигнала спаривания до тех пор, пока транспортное средство 20 после этого не переместится и не достигнет предварительно определенной позиции в месте 32 для парковки.
[0076] Кроме того, диапазоны возможности приема сигналов подкатушек, смежных друг с другом, частично перекрывают друг друга. Таким образом, можно не допускать разъединения связи с катушкой 11 для передачи энергии.
[0077] Кроме того, если значения суммы фрагментов идентификационных данных, принимаемых посредством подкатушек, либо значение суммы комбинированных данных и значение суммы идентификационных данных, передаваемых из катушки для передачи энергии, не совпадают между собой, идентификационные данные не передаются. В частности, контроллер 24 транспортного средства определяет правдоподобность комбинированных идентификационных данных и не передает комбинированные идентификационные данные в наземный модуль 51, если они не являются правдоподобными. Таким образом, когда, например, фрагменты идентификационных данных, передаваемых из множества мест для парковки, присутствуют совместно, можно исключать спаривание и инструктировать водителю признавать то, что припаркованная позиция транспортного средства 20 является несоответствующей.
[0078] Дополнительно, спаривание отменяется, если сигналы спаривания, принимаемые посредством всех подкатушек SC1-SC4, прерываются, либо если идентификационные данные, содержащиеся в сигналах спаривания, становятся несогласованными с идентификационными данными, содержащимися в сигнале спаривания, передаваемом из наземного модуля 51. Таким образом, если транспортное средство 20 отъезжает из места 32 для парковки, спаривание отменяется, как только связь между подкатушками SC1-SC4 и катушкой 11 для передачи энергии разъединяется. Таким образом, транспортное средство 20 может немедленно переключаться на операцию спаривания с другим местом для парковки. Кроме того, место 32 для парковки после отмены спаривания может переключаться на спаривание с другим транспортным средством.
[0079] Описание модификаций этого варианта осуществления
В вышеописанном варианте осуществления, приведено описание примера, в котором подкатушки SC1-SC4, показанные на фиг. 4, монтируются в качестве подкатушек, предоставленных в днище транспортного средства 20. В частности, приведено описание примера, в котором смонтирована подкатушка SC1, намотанная вокруг сердечника, идентичного сердечнику катушки 21 для приема энергии, подкатушка SC2, предоставленная на передней стороне относительно подкатушки SC1, и подкатушки SC3, SC4, предоставленные на левой задней стороне и правой задней стороне относительно подкатушки SC1, соответственно.
[0080] Настоящее изобретение требует монтажа только, по меньшей мере, одной подкатушки на каждой из передней стороны и задней стороны относительно катушки 21 для приема энергии. Помимо компоновки подкатушек, показанной на фиг. 4, могут использоваться, например, компоновки, показанные в частях (a)-(d) по фиг. 26. Часть (a) по фиг. 26 включает в себя подкатушку SC2, предоставленную на передней стороне относительно катушки 21 для приема энергии, и подкатушку SC5, предоставленную на задней стороне относительно катушки 21 для приема энергии. Кроме того, подкатушка не монтируется около катушки 21 для приема энергии. Другими словами, подкатушка SC1, показанная на фиг. 4, не монтируется. Диапазон Q0 возможности приема сигналов задается вокруг катушки 21 для приема энергии, диапазон Q2 возможности приема сигналов задается вокруг подкатушки SC2, и диапазон Q5 возможности приема сигнала задается вокруг подкатушки SC5.
[0081] В этом случае, катушка 21 для приема энергии принимает сигнал спаривания, передаваемый из катушки 11 для передачи энергии, и получает идентификационные данные. В частности, когда диапазон Q0 возможности приема сигналов катушки 21 для приема энергии перекрывает диапазон возбуждения катушки 11 для передачи энергии, катушка 21 для приема энергии принимает сигнал спаривания, передаваемый из катушки 11 для передачи энергии. Затем получаются идентификационные данные, содержащиеся в сигнале спаривания, принимаемом посредством катушки 21 для приема энергии, и выполняется спаривание. Эта компоновка подкатушек также позволяет достигать преимуществ, аналогичных преимуществам посредством вышеописанного варианта осуществления. Кроме того, поскольку катушка 21 для приема энергии используется для того, чтобы получать идентификационные данные, число подкатушек может уменьшаться.
[0082] Часть (b) по фиг. 26 включает в себя подкатушку SC1, намотанную вокруг сердечника, идентичного сердечнику катушки 21 для приема энергии, подкатушку SC2, предоставленную на передней стороне относительно катушки 21 для приема энергии, и подкатушку SC5, предоставленную на задней стороне относительно катушки 21 для приема энергии. Кроме того, диапазон Q1 возможности приема сигналов задается вокруг подкатушки SC1, диапазон Q2 возможности приема сигналов задается вокруг подкатушки SC2, и диапазон Q5 возможности приема энергии задается вокруг подкатушки SC5. Эта компоновка подкатушек также позволяет достигать преимуществ, аналогичных преимуществам посредством вышеописанного варианта осуществления.
[0083] Часть (c) по фиг. 26 включает в себя подкатушку SC2, предоставленную на передней стороне относительно катушки 21 для приема энергии, подкатушки SC3, SC4, предоставленные на левой задней стороне и правой задней стороне относительно катушки 21 для приема энергии соответственно, и подкатушку SC6, предоставленную позади подкатушек SC3, SC4. Кроме того, диапазон Q0 возможности приема сигналов задается вокруг катушки 21 для приема энергии, диапазон Q2 возможности приема сигналов задается вокруг подкатушки SC2, диапазон Q3 возможности приема сигналов задается вокруг подкатушки SC3, диапазон Q4 возможности приема сигналов задается вокруг подкатушки SC4, и диапазон Q6 возможности приема сигналов задается вокруг подкатушки SC6. Эта компоновка подкатушек также позволяет достигать преимуществ, аналогичных преимуществам посредством вышеописанного варианта осуществления.
[0084] Часть (d) по фиг. 26 включает в себя подкатушку SC2, предоставленную на передней стороне относительно катушки 21 для приема энергии, и подкатушки SC3, SC4, предоставленные на левой задней стороне и правой задней стороне относительно катушки 21 для приема энергии, соответственно. Кроме того, диапазон Q0 возможности приема сигналов задается вокруг катушки 21 для приема энергии, диапазон Q2 возможности приема сигналов задается вокруг подкатушки SC2, диапазон Q3 возможности приема сигналов задается вокруг подкатушки SC3, и диапазон Q4 возможности приема сигналов задается вокруг подкатушки SC4. Эта компоновка подкатушек также позволяет достигать преимуществ, аналогичных преимуществам посредством вышеописанного варианта осуществления.
[0085] Хотя система беспроводной подачи энергии и устройство беспроводного приема энергии настоящего изобретения описаны на основе проиллюстрированного варианта осуществления, настоящее изобретение не ограничено ими. Конфигурация каждой части может быть заменена любой конфигурацией, имеющей аналогичную функцию.
[0086] Например, в вышеописанном варианте осуществления, приведено описание примера, в котором аккумулятор 23 представляет собой электрическую нагрузку. Тем не менее, настоящее изобретение не ограничено этим примером. Например, электромотор может представлять собой электрическую нагрузку.
Перечень позиционных обозначений
[0087]
11, 11a - катушка для передачи энергии
12 - силовой модуль
13 - наземный контроллер
14 - модуль связи
15 - источник энергии постоянного тока
20 - транспортное средство
21 - катушка для приема энергии
22 - выпрямляюще-сглаживающая схема
23 - аккумулятор
24 - контроллер транспортного средства
25 - модуль связи
31 - схема инвертора
32, 32a - место для парковки
33, 33a - датчик обнаружения транспортных средств
51, 51a - наземный модуль
61 - ферритовый сердечник
101 - устройство передачи энергии
102 - устройство приема энергии
Реферат
Группа изобретений относится к беспроводной зарядке аккумулятора транспортных средств. Система беспроводной подачи энергии содержит устройство приема энергии, установленное в транспортном средстве, и устройство передачи энергии, установленное на земле. Устройство передачи энергии включает в себя катушку для передачи энергии, модуль управления и модуль связи. Устройство приема энергии включает в себя катушку для приема энергии, подкатушки для приема энергии в качестве сигнала шаблона возбуждения, модуль управления и модуль связи. При приближении транспортного средства к месту парковки модуль управления подачей энергии выполняет возбуждение с использованием сигнала шаблона, содержащего идентификационные данные. Модуль управления приемом энергии получает идентификационные данные, а модуль связи на стороне приема передает их в устройство передачи энергии. При совпадении идентификационных данных модуль управления подачей энергии начинает передачу энергии. Также заявлено устройство беспроводного приема энергии, предоставленное в транспортном средстве. Технический результат заключается в уменьшении времени начала зарядки транспортного средства после остановки в месте парковки. 2 н. и 7 з.п. ф-лы, 26 ил.
Комментарии