Способ для управления системой бесконтактной подачи электроэнергии и система бесконтактной подачи электроэнергии - RU2729776C1
Код документа: RU2729776C1
Чертежи
















Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу для управления системой бесконтактной подачи электроэнергии и к системе бесконтактной подачи электроэнергии.
Уровень техники
[0002] В системе бесконтактной подачи электроэнергии, которая передает электроэнергию бесконтактным способом, из устройства передачи электроэнергии, обеспеченного на стороне земли, в устройство приема электроэнергии, смонтированное на транспортном средстве, и заряжает аккумулятор, смонтированный на транспортном средстве, вероятно, что поскольку передается большая величина электроэнергии, беспроводная связь за счет слабой радиоволны, используемой для системы отпирания дверей без ключа (системы для блокировки и разблокировки двери без вставки ключа в замочную скважину), нарушается за счет утечки в магнитном поле, и система отпирания дверей без ключа неправильно функционирует. Патентный документ 1 раскрывает то, что подача электроэнергии прекращается, когда беспроводная связь должна выполняться между портативной машиной, носимой пассажиром, и главным транспортным средством во время бесконтактной подачи электроэнергии, и подача электроэнергии начинается снова, как только завершается беспроводная связь.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Патент (Япония) номер 6036348
Сущность изобретения
[0004] Однако, в традиционном примере, раскрытом в патентном документе 1, подача электроэнергии может прекращаться, чтобы предотвращать неправильное функционирование системы отпирания дверей без ключа, когда пассажир главного транспортного средства оперирует системой отпирания дверей без ключа. Однако, влияние на систему отпирания дверей без ключа другого транспортного средства, припаркованного рядом с главным транспортным средством, не рассматривается. Следовательно, вероятно, что когда главное транспортное средство выполняет бесконтактную подачу электроэнергии, нарушается беспроводная связь системы отпирания дверей без ключа другого транспортного средства рядом с главным транспортным средством, и система отпирания дверей без ключа другого транспортного средства неправильно функционирует.
[0005] Настоящее изобретение осуществлено с возможностью разрешать такую проблему в прошлом, и цель настоящего изобретения заключается в том, чтобы предоставлять способ для управления системой бесконтактной подачи электроэнергии и систему бесконтактной подачи электроэнергии, способные исключить ситуации, когда главное транспортное средство выполняет бесконтактную подачу электроэнергии, при этом бесконтактная подача электроэнергии влияет на беспроводную связь систем отпирания дверей без ключа главного транспортного средства и другого транспортного средства рядом с главным транспортным средством.
[0006] Аспект настоящего изобретения представляет собой способ для управления системой бесконтактной подачи электроэнергии, которая прекращает или уменьшает подачу электроэнергии, когда во время бесконтактной подачи электроэнергии, движущийся объект обнаруживается в области обнаружения вокруг катушки для приема электроэнергии или катушки для передачи электроэнергии. Когда другое транспортное средство припарковано рядом с главным транспортным средством, область обнаружения расширяется по сравнению со случаем, когда другое транспортное средство не припарковано.
Преимущества изобретения
[0007] Согласно аспекту настоящего изобретения, можно исключать ситуацию, в которой нарушается беспроводная связь систем отпирания дверей без ключа главного транспортного средства и другого транспортного средства.
Краткое описание чертежей
[0008] Фиг. 1 является блок–схемой, показывающей конфигурацию системы бесконтактной подачи электроэнергии согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является пояснительной схемой, показывающей области расположения и обнаружения в случае, в котором сонары применяются в качестве датчиков расстояния.
Фиг. 3 является пояснительной схемой, показывающей области расположения и обнаружения в случае, в котором камеры применяются в качестве датчиков расстояния.
Фиг. 4 является пояснительной схемой, показывающей области расположения и обнаружения в случае, в котором доплеровские датчики применяются в качестве датчиков движущихся объектов.
Фиг. 5 является пояснительной схемой, показывающей области обнаружения доплеровских датчиков.
Фиг. 6A является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство отсутствует около главного транспортного средства.
Фиг. 6B является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство присутствует около главного транспортного средства.
Фиг. 6C является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство отсутствует около главного транспортного средства.
Фиг. 7 является блок–схемой последовательности операций способа, связанной с первым вариантом осуществления настоящего изобретения и показывающей процедуру, в которой главное транспортное средство останавливается в позиции возможности подачи электроэнергии места для парковки и начинает подачу электроэнергии.
Фиг. 8 является блок–схемой последовательности операций способа, показывающей обработку системы бесконтактной подачи электроэнергии согласно первому варианту осуществления настоящего изобретения.
Фиг. 9 является пояснительной схемой, показывающей модификацию первого варианта осуществления.
Фиг. 10 является блок–схемой, показывающей конфигурацию системы бесконтактной подачи электроэнергии согласно второму варианту осуществления настоящего изобретения.
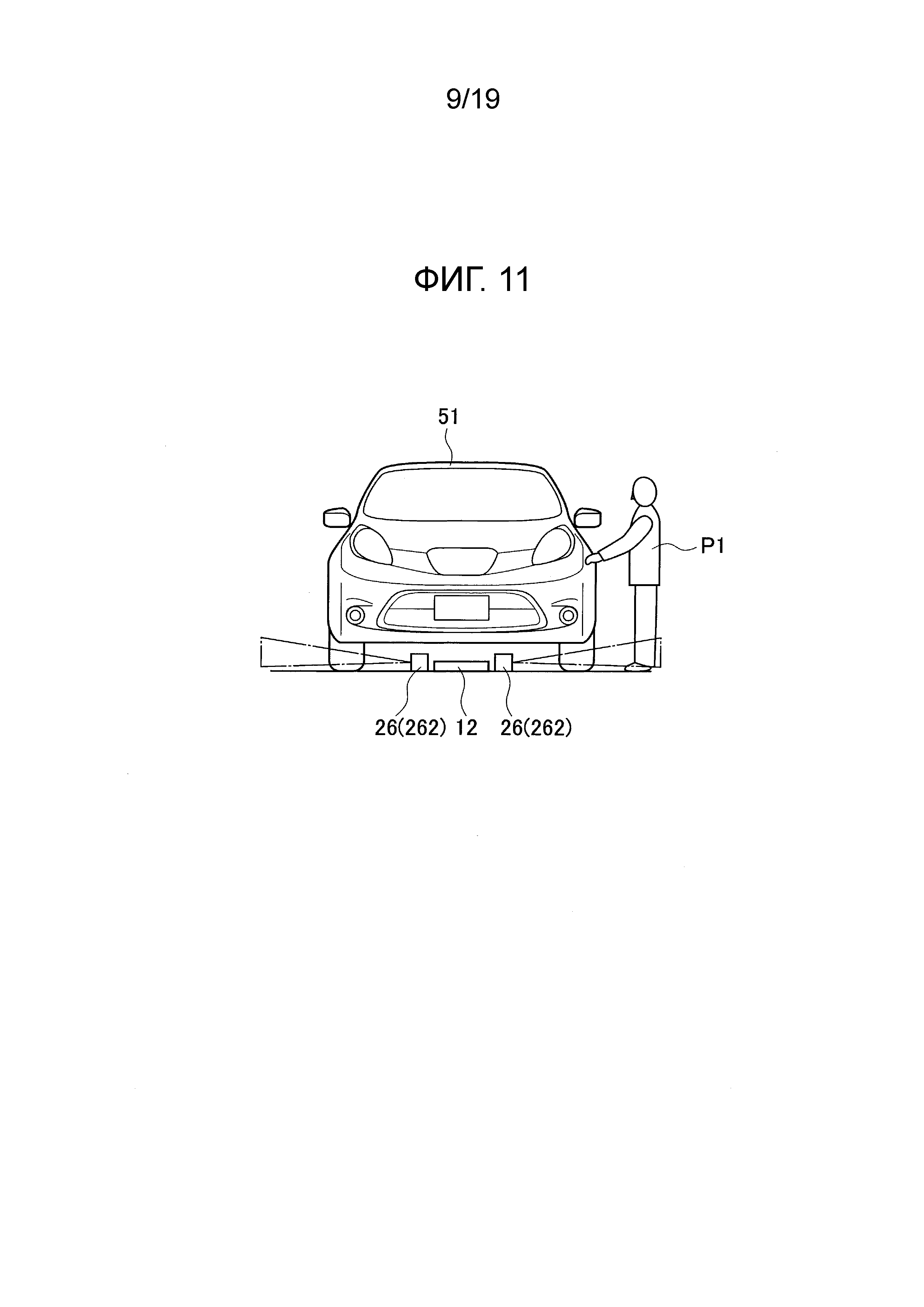
Фиг. 11 является пояснительной схемой, показывающей доплеровские датчики, установленные на стороне земли, и их области обнаружения.
Фиг. 12 является блок–схемой последовательности операций способа, показывающей обработку системы бесконтактной подачи электроэнергии согласно третьему варианту осуществления настоящего изобретения.
Фиг. 13 является блок–схемой последовательности операций способа, показывающей обработку системы бесконтактной подачи электроэнергии согласно четвертому варианту осуществления настоящего изобретения.
Фиг. 14A является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство не припарковано сбоку от главного транспортного средства.
Фиг. 14B является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство припарковано сзади сбоку от главного транспортного средства.
Фиг. 14C является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство припарковано спереди сбоку от главного транспортного средства.
Фиг. 14D является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство припарковано под углом сбоку от главного транспортного средства.
Фиг. 14E является пояснительной схемой, показывающей области обнаружения доплеровских датчиков в случае, в котором другое транспортное средство припарковано сбоку и параллельно главному транспортному средству.
Фиг. 15 является блок–схемой, показывающей конфигурацию системы бесконтактной подачи электроэнергии согласно пятому варианту осуществления настоящего изобретения.
Фиг. 16 является пояснительной схемой, связанной с пятым вариантом осуществления настоящего изобретения и показывающей состояние, в котором транспортное средство, припаркованное в месте для парковки, фотографируется посредством камеры.
Фиг. 17 является блок–схемой последовательности операций способа, показывающей обработку системы бесконтактной подачи электроэнергии согласно шестому варианту осуществления настоящего изобретения.
Фиг. 18A является пояснительной схемой, связанной с шестым вариантом осуществления настоящего изобретения и показывающей состояние, в котором другое транспортное средство припарковано впереди главного транспортного средства.
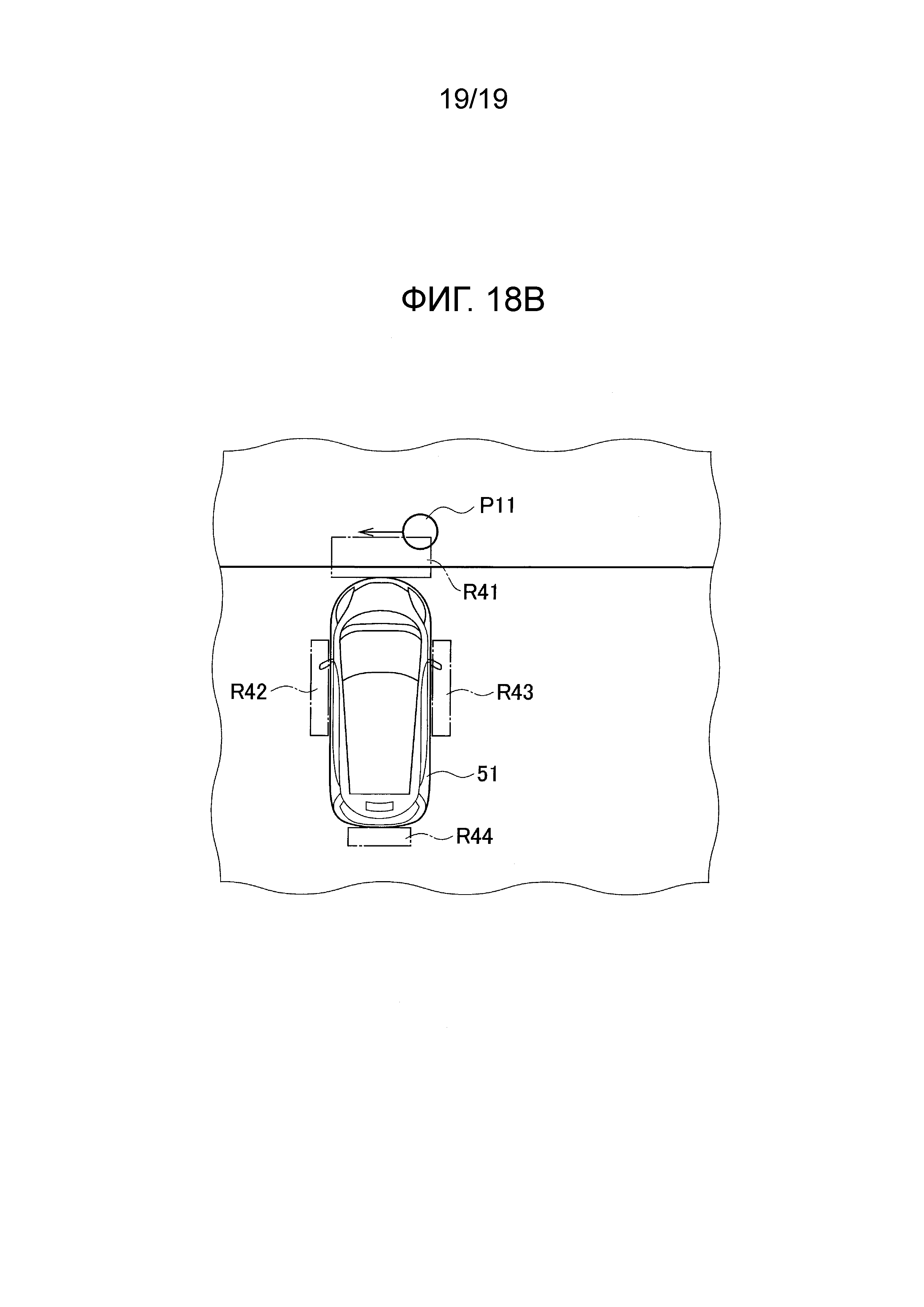
Фиг. 18B является пояснительной схемой, связанной с шестым вариантом осуществления настоящего изобретения и показывающей состояние, в котором другое транспортное средство не припарковано впереди главного транспортного средства.
Подробное описание вариантов осуществления
[0009] Ниже поясняются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Пояснение первого варианта осуществления
Фиг. 1 является блок–схемой, показывающей конфигурацию системы бесконтактной подачи электроэнергии согласно первому варианту осуществления. Как показано на фиг. 1, система 1 бесконтактной подачи электроэнергии включает в себя устройство 100 подачи электроэнергии, которое представляет собой модуль на стороне земли, и устройство 200 приема электроэнергии, которое представляет собой модуль на стороне транспортного средства. Система бесконтактной подачи электроэнергии подает электроэнергию бесконтактным способом из устройства 100 подачи электроэнергии, расположенного в станции подачи электроэнергии и т.п., в устройство 200 приема электроэнергии, смонтированное на главном транспортном средстве 51, такое как электрический автомобиль или гибридный автомобиль.
[0010] Устройство 100 подачи электроэнергии включает в себя катушку 12 для передачи электроэнергии, расположенную в месте 2 для парковки около станции подачи электроэнергии. Устройство 100 подачи электроэнергии включает в себя наземный контроллер 11 (схему управления подачей электроэнергии). Устройство 200 приема электроэнергии включает в себя катушку 22 для приема электроэнергии, установленную на нижней поверхности главного транспортного средства 51. Катушка 22 для приема электроэнергии располагается прямо над катушкой 12 для передачи электроэнергии, когда главное транспортное средство 51 припарковано в предварительно определенной позиции для парковки (в позиции возможности подачи электроэнергии) места 2 для парковки.
[0011] Катушка 12 для передачи электроэнергии сконфигурирована посредством первичной катушки, сформированной посредством токоведущего провода, и передает электроэнергию в катушку 22 для приема электроэнергии. Катушка 22 для приема электроэнергии сконфигурирована посредством вторичной катушки, также сформированной посредством токоведущего провода, и принимает электроэнергию, передаваемое из катушки 12 для передачи электроэнергии. Можно подавать электроэнергию, бесконтактным способом, из катушки 12 для передачи электроэнергии в катушку 22 для приема электроэнергии с помощью действия электромагнитной индукции между катушкой 12 для передачи электроэнергии и катушкой 22 для приема электроэнергии.
[0012] Наземный контроллер 11 включает в себя инвертор, сконфигурированный посредством переключающего элемента. Наземный контроллер 11 выпрямляет электроэнергию переменного тока, передаваемое из источника питания переменного тока (не показан на чертеже), преобразует электроэнергию переменного тока в электроэнергию переменного тока, имеющее более высокую частоту, и подает электроэнергию переменного тока в катушку 12 для передачи электроэнергии. Наземный контроллер 11 управляет подачей электроэнергии в катушку 12 для передачи электроэнергии и прекращением подачи электроэнергии. Дополнительно, наземный контроллер 11 может изменять электроэнергию, подаваемое в катушку 12 для передачи электроэнергии. Наземный контроллер 11 имеет функцию беспроводной связи и выполняет двунаправленную связь между наземным контроллером 11 и модулем 23 беспроводной связи, обеспеченным в устройстве 200 приема электроэнергии главного транспортного средства 51.
[0013] Устройство 200 приема электроэнергии включает в себя катушку 22 для приема электроэнергии, модуль 23 беспроводной связи, контроллер 24 транспортного средства, модуль 25 выпрямления, аккумулятор 27, датчик 26 движущихся объектов и датчик 28 расстояния.
[0014] Модуль 25 выпрямления выпрямляет электроэнергию переменного тока, принимаемое посредством катушки 22 для приема электроэнергии, и заряжает аккумулятор 27 с помощью выпрямленного электроэнергии постоянного тока.
[0015] Датчик 28 расстояния обнаруживает объект, такой как другое транспортное средство, присутствующее около главного транспортного средства 51, и дополнительно измеряет расстояние до обнаруженного объекта. Сонар или камера может использоваться в качестве датчика 28 расстояния. Датчик 28 расстояния выводит обнаруженные данные расстояния в контроллер 24 транспортного средства.
[0016] Датчик 26 движущихся объектов обнаруживает движущийся объект, такой как пешеход, присутствующий около главного транспортного средства 51. Доплеровский датчик или камера может использоваться в качестве датчика 26 движущихся объектов. Датчик 26 движущихся объектов имеет функцию регулирования диапазона обнаружения движущегося объекта. Диапазон обнаружения может изменяться, как указано посредством области R1, показанной на фиг. 6A, и области R11, показанной на фиг. 6B, поясненных ниже, согласно управлению посредством контроллера 24 транспортного средства.
[0017] Контроллер 24 транспортного средства отслеживает состояние заряда аккумулятора 27 и передает текущую информацию электроэнергии и сигнал запроса на электроэнергию в наземный контроллер 11 устройства 100 подачи электроэнергии через модуль 23 беспроводной связи. Контроллер 24 транспортного средства передает данные расстояния до объекта, обнаруженного посредством датчика 28 расстояния, и обнаруживаемые данные движущегося объекта, обнаруженные посредством датчика 26 движущихся объектов, в наземный контроллер 11. Дополнительно, когда другое транспортное средство рядом с главным транспортным средством 51 обнаруживается посредством датчика 28 расстояния, контроллер 24 транспортного средства выполняет управление для изменения области обнаружения датчика 26 движущихся объектов.
[0018] Модуль 23 беспроводной связи выполняет двунаправленную связь между модулем 23 беспроводной связи и наземным контроллером 11. Аккумулятор 27 сконфигурирован посредством соединения множества вторичных элементов и функционирует в качестве источника электроэнергии главного транспортного средства 51.
[0019] При такой конфигурации, система бесконтактной подачи электроэнергии выполняет передачу электроэнергии и прием электроэнергии для высокочастотного электроэнергии в бесконтактном состоянии с помощью действия электромагнитной индукции между катушкой 12 для передачи электроэнергии и катушкой 22 для приема электроэнергии. То есть, электропитание подается в катушку 12 для передачи электроэнергии, за счет чего магнитная связь возникает между катушкой 12 для передачи электроэнергии и катушкой 22 для приема электроэнергии, и электропитание подается из катушки 12 для передачи электроэнергии в катушку 22 для приема электроэнергии. Электропитание, подаваемое в катушку 22 для приема электроэнергии, выпрямляется посредством модуля 25 выпрямления и после этого заряжается в аккумулятор 27.
[0020] Следует отметить, что наземный контроллер 11 и контроллер 24 транспортного средства, поясненные выше, могут быть реализованы с использованием микрокомпьютера, включающего в себя CPU (центральный процессор), запоминающее устройство и модуль ввода–вывода. Компьютерная программа для инструктирования микрокомпьютеру функционировать в качестве наземного контроллера 11 или контроллера 24 транспортного средства устанавливается в микрокомпьютере и выполняется. Следовательно, микрокомпьютер функционирует в качестве множества схем обработки, включенных в наземный контроллер 11 или контроллер 24 транспортного средства. Следует отметить, что поясняется пример, в котором наземный контроллер 11 или контроллер 24 транспортного средства реализованы посредством программного обеспечения. Однако, естественно, может применяться конфигурация с использованием специализированных аппаратных средств.
[0021] Пояснение датчика расстояния и датчика движущихся объектов
В дальнейшем поясняются подробности датчика 28 расстояния и датчика 26 движущихся объектов, поясненных выше. В этом варианте осуществления, сонары используются в качестве датчиков 28 расстояния, и доплеровские датчики используются в качестве датчиков 26 движущихся объектов.
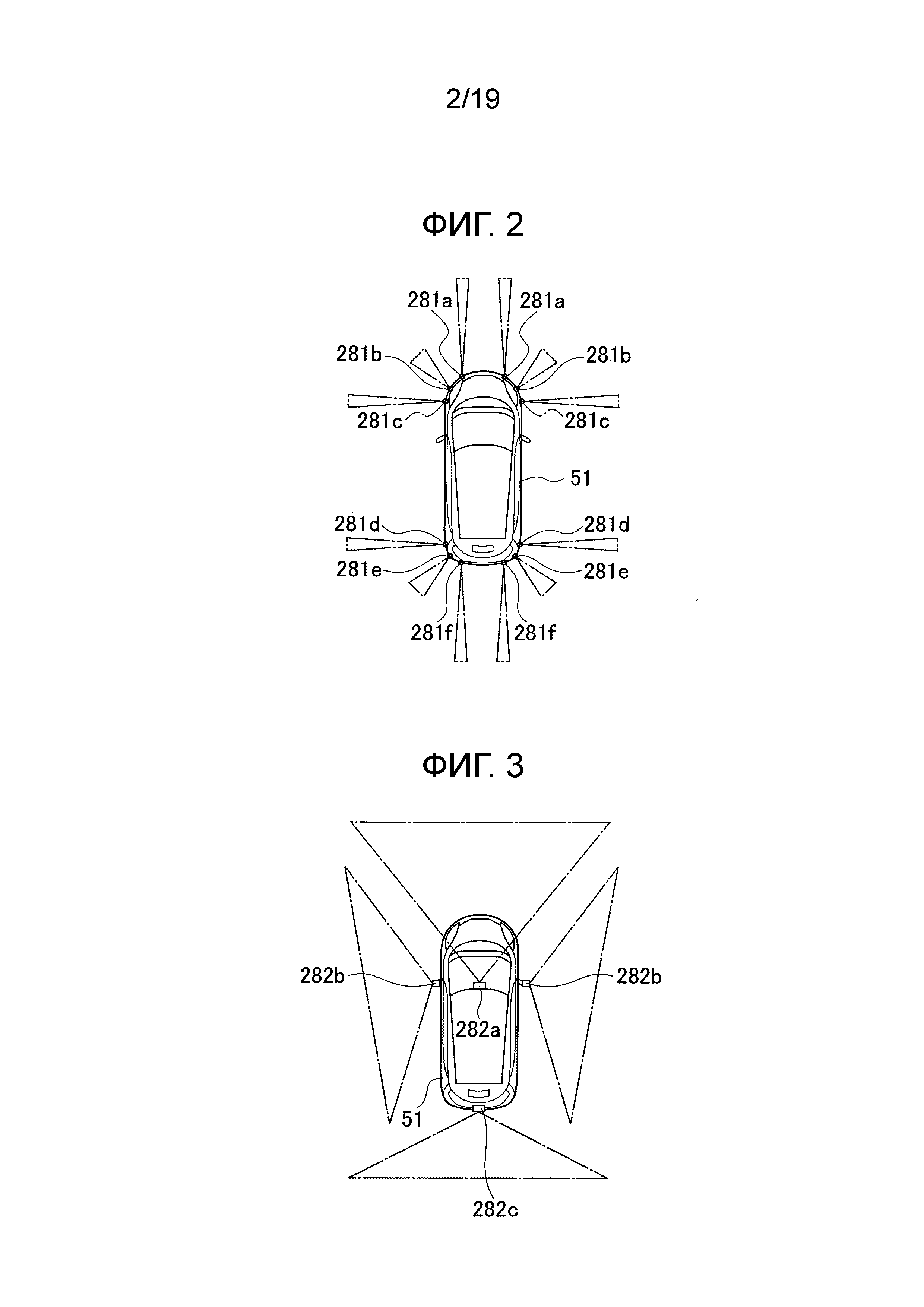
[0022] Фиг. 2 является пояснительной схемой, показывающей области расположения и обнаружения в случае, в котором сонары 281 (281a–281f) применяются в качестве датчиков 28 расстояния. Сонар 281 передает ультразвук к периферии главного транспортного средства 51 и обнаруживает отраженную волну ультразвука, чтобы за счет этого обнаруживать объект, такой как другое транспортное средство, присутствующее около главного транспортного средства 51, и дополнительно измеряет расстояние до обнаруженного объекта. Как показано на фиг. 2, сонары 281 включают в себя передние сонары 281a, которые обнаруживают объекты перед главным транспортным средством 51, передние угловые сонары 281b, которые обнаруживают объекты в левой и правой передних частях главного транспортного средства 51, передние боковые сонары 281c, которые обнаруживают объекты в передних сторонах главного транспортного средства 51, задние боковые сонары 281d, которые обнаруживают объекты в задних сторонах главного транспортного средства 51, задние угловые сонары 281e, которые обнаруживают объекты в левой и правой задних частях главного транспортного средства 51, и задние сонары 281f, которые обнаруживают объекты в задней части главного транспортного средства 51.
[0023] Фиг. 3 является пояснительной схемой, показывающей области расположения и обнаружения в случае, в котором камеры 282 (282a–282c) применяются в качестве другого примера датчиков 28 расстояния. Как показано на фиг. 3, камеры 282 включают в себя камеру 282a переднего вида, которая фотографирует переднюю часть главного транспортного средства 51, боковые камеры 282b, которые фотографируют боковые части главного транспортного средства 51, и камеру 282c заднего вида, которая фотографирует заднюю часть главного транспортного средства 51. Посредством анализа изображений, сфотографированных посредством камер 282, обнаруживаются объекты, присутствующие около главного транспортного средства 51, и измеряются расстояния до обнаруженных объектов. Камеры кругового обзора также могут использоваться в качестве камер 282.
[0024] Фиг. 4 является пояснительной схемой, показывающей области расположения и обнаружения в случае, в котором доплеровские датчики 262 применяются в качестве датчиков 26 движущихся объектов. Доплеровские датчики 262, например, обеспечиваются в нижней части главного транспортного средства 51. Как показано на фиг. 5, доплеровские датчики 262 излучают радиоволны (микроволны) на области R3 обнаружения перед главным транспортным средством 51, области R1 и R2 обнаружения по сторонам от главного транспортного средства 51 и области R4 обнаружения в задней части главного транспортного средства 51 и обнаруживают отраженные волны, отраженные на объектах. Доплеровские датчики 262 сравнивают частоты излучаемых радиоволн и частоты радиоволн, отраженных на объектах, чтобы за счет этого обнаруживать перемещения объектов. Когда объекты перемещаются, частоты отраженных волн изменяются согласно доплеровскому эффекту. Следовательно, можно обнаруживать перемещаются ли объекты или являются неподвижными.
[0025] Следовательно, как показано на фиг. 4, можно обнаруживать пассажира P1 (движущийся объект), который приближается к главному транспортному средству 51 и оперирует кнопкой запроса системы отпирания дверей без ключа, обеспеченной в двери. Следует отметить, что на фиг. 5, показаны только области R1–R4 обнаружения доплеровских датчиков 262. Иллюстрация доплеровских датчиков 262 опускается.
[0026] Области обнаружения доплеровских датчиков 262 являются изменяемыми. В этом варианте осуществления, область обнаружения доплеровского датчика 262 изменяется согласно результату обнаружения посредством сонара 281 (датчика 28 расстояния), показанного на фиг. 2. В частности, как показано на фиг. 6A, например, когда объект не обнаруживается в пределах порогового расстояния Dth посредством сонара 281c, и определяется, что другое транспортное средство рядом с главным транспортным средством 51 отсутствует, область обнаружения доплеровского датчика 262 задается как R1. Как пояснено ниже, область R1 обнаружения представляет собой диапазон от центральной линии C1 главного транспортного средства 51 на расстояние D0.
[0027] С другой стороны, когда другое транспортное средство 52 присутствует, как показано на фиг. 6B, область обнаружения доплеровского датчика 262 задается как R11, расширяющаяся наружу по сравнению с R1. Как пояснено ниже, область R11 обнаружения представляет собой диапазон от центральной линии C1 главного транспортного средства 51 на расстоянии “D(t)+D1”(>D0). Таким образом, когда другое транспортное средство 52 рядом с главным транспортным средством 51 присутствует, область обнаружения доплеровского датчика 262 задается широкой, так что может обнаруживаться более далекий движущийся объект.
[0028] Следовательно, когда пассажир другого транспортного средства 52 приближается к другому транспортному средству 52, чтобы оперировать кнопкой запроса, обеспеченной в двери, можно обнаруживать упомянутого пассажира.
Камеры могут использоваться в качестве другого примера датчиков 26 движущихся объектов. Посредством фотографирования периферии главного транспортного средства 51 с помощью камер и анализа сфотографированных изображений, можно обнаруживать движущийся объект, присутствующий около главного транспортного средства 51.
[0029] Пояснение процедуры обработки в первом варианте осуществления
В дальнейшем поясняется действие системы бесконтактной подачи электроэнергии согласно первому варианту осуществления, сконфигурированной как пояснено выше, со ссылкой на блок–схемы последовательности операций способа на фиг. 7 и фиг. 8. Фиг. 7 показывает процедуру обработки для определения, останавливается или нет главное транспортное средство 51 в позиции возможности подачи электроэнергии места 2 для парковки, и начала подачи электроэнергии.
[0030] Во–первых, на этапе S11, наземный контроллер 11 обнаруживает главное транспортное средство 51, приближающееся к месту 2 для парковки. На этапе S12, наземный контроллер 11 определяет, с помощью датчика обнаружения позиции (не показан на чертеже), который обнаруживает позицию главного транспортного средства 51, останавливается или нет главное транспортное средство 51, приближающееся к месту 2 для парковки, в позиции возможности подачи электроэнергии. Наземный контроллер 11 определяет, что главное транспортное средство 51 находится в позиции возможности подачи электроэнергии, когда главное транспортное средство 51 достигает позиции, в которой катушка 22 для приема электроэнергии располагается напротив катушки 12 для передачи электроэнергии, показанной на фиг. 1, или позиции в пределах предварительно определенного диапазона от противоположной позиции.
[0031] При определении того, что главное транспортное средство 51 останавливается в позиции возможности подачи электроэнергии, на этапе S13, наземный контроллер 11 подает электроэнергию в катушку 12 для передачи электроэнергии и начинает заряд аккумулятора 27. Таким образом, наземный контроллер 11 подает электроэнергию в катушку 12 для передачи электроэнергии, чтобы подавать питание в катушку 12 для передачи электроэнергии, и передает электроэнергию в катушку 22 для приема электроэнергии бесконтактным способом. Электропитание, принимаемое посредством катушки 22 для приема электроэнергии, выпрямляется посредством модуля 25 выпрямления и после этого заряжается в аккумуляторе 27.
[0032] В этом варианте осуществления, когда бесконтактная подача электроэнергии выполняется между катушкой 12 для передачи электроэнергии и катушкой 22 для приема электроэнергии, и движущийся объект, такой как пешеход, обнаруживается около главного транспортного средства 51, выполняется обработка для прекращения или уменьшения подачи электроэнергии в катушку 12 для передачи электроэнергии.
[0033] В нижеприведенном пояснении поясняется процедура обработки во время бесконтактной подачи электроэнергии со ссылкой на блок–схему последовательности операций способа на фиг. 8. Во–первых, на этапе S21, контроллер 24 транспортного средства приводит в действие сонары 281 (датчики 28 расстояния) и определяет, присутствует или нет объект около главного транспортного средства 51, на основе обнаруживаемых данных сонаров 281. Дополнительно, когда объект присутствует, контроллер 24 транспортного средства измеряет расстояние D(t) до объекта. Следует отметить, что "t" указывает время определения расстояния. Расстояние D(t) представляет собой расстояние относительно центральной линии (C1, показанной на фиг. 6A) главного транспортного средства 51.
[0034] На этапе S22, контроллер 24 транспортного средства определяет, меньше или нет расстояние D(t) предварительно установленного порогового расстояния Dth. Пороговое расстояние Dth может задаваться на основе расстояния до другого транспортного средства, припаркованного рядом с главным транспортным средством 51.
[0035] Когда “D(t)≥Dth” ("Нет" на этапе S22), на этапе S24, контроллер 24 транспортного средства определяет, что другое транспортное средство рядом с главным транспортным средством 51 отсутствует.
[0036] Когда “D(t) [0037] Когда разность не равна нулю ("Нет" на этапе S23), объект, обнаруженный посредством сонаров 281, перемещается. На этапе S25, контроллер 24 транспортного средства определяет, что другое транспортное средство отсутствует. [0038] С другой стороны, когда разность равна нулю ("Да" на этапе S23), поскольку объект, обнаруженный посредством сонаров 281, останавливается, на этапе S26, контроллер 24 транспортного средства определяет, что другое транспортное средство 52 рядом с главным транспортным средством 51 присутствует. [0039] При определении на этапе S24 или S25 того, что другое транспортное средство отсутствует, на этапе S27, как показано на фиг. 6A, контроллер 24 транспортного средства задает область обнаружения на стороне доплеровского датчика 262 как область R1 на расстоянии D0 (в дальнейшем называемым "нормальным расстоянием D0 обнаружения") от центральной линии C1. Нормальное расстояние D0 обнаружения предпочтительно задается как расстояние, на которое пассажир главного транспортного средства 51 приближается к главному транспортному средству 51, чтобы оперировать кнопкой запроса для блокировки и разблокировки. Нормальное расстояние D0 обнаружения составляет, например, 5 м. Как результат, как показано на фиг. 4, можно обнаруживать пассажира P1. [0040] При определении на этапе S26 того, что рядом другое транспортное средство 52 присутствует, на этапе S28, как показано на фиг. 6B, контроллер 24 транспортного средства задает область обнаружения на стороне доплеровского датчика 262 как область R11 на расстоянии “D(t)+D1” от центральной линии C1. “D1” представляет собой расстояние расширения. Как результат, поскольку пассажир, который приближается к другому транспортному средству 52 и оперирует кнопкой запроса около двери, включен в область обнаружения доплеровского датчика 262, можно обнаруживать пассажира другого транспортного средства 52. Как показано на фиг. 6B, также можно задавать расстояние расширения равным “D1'”, большим ширины транспортного средства другого транспортного средства 52. Посредством задания расстояния расширения таким образом, область обнаружения доплеровского датчика 262 задается как область на расстоянии “D(t)+D1'” от центральной линии C1. Как результат, как показано на фиг. 6C, можно обнаруживать пассажира P2 другого транспортного средства 52, который приближается к главному транспортному средству 51 с противоположной стороны (на чертеже, с правой стороны). Можно обнаруживать движущийся объект с большей точностью. [0041] На этапе S29, контроллер 24 транспортного средства определяет, обнаруживается или нет движущийся объект посредством доплеровских датчиков 262. Когда движущийся объект обнаруживается ("Да" на этапе S29), на этапе S30, контроллер 24 транспортного средства выводит, из модуля 23 беспроводной связи в наземный контроллер 11 устройства 100 подачи электроэнергии, сигнал команды для прекращения или уменьшения подачи электроэнергии. Следовательно, наземный контроллер 11 прекращает или уменьшает подачу электроэнергии в катушку 12 для передачи электроэнергии. То есть, когда система отпирания дверей без ключа управляется в главном транспортном средстве 51 или другом транспортном средстве 52 рядом с главным транспортным средством 51, можно предотвращать воздействие на беспроводную связь при работе системы отпирания дверей без ключа. С другой стороны, при определении в обработке на этапе S29 того, что движущийся объект не обнаруживается, на этапе S31, контроллер 24 транспортного средства, задает подачу электроэнергии в катушку 12 для передачи электроэнергии как подачу электроэнергии в нормальное время. [0042] Пояснение преимуществ первого варианта осуществления Таким образом, система бесконтактной подачи электроэнергии согласно первому варианту осуществления определяет с помощью сонаров 281 (датчиков 28 расстояния), присутствует или нет другое транспортное средство 52 рядом с главным транспортным средством 51. Когда другое транспортное средство отсутствует, как показано на фиг. 6A, система бесконтактной подачи электроэнергии задает область обнаружения доплеровского датчика 262 (датчика 26 движущихся объектов) как R1. Следовательно, поскольку только пассажир, приближающийся к главному транспортному средству 51, обнаруживается, и когда пассажир обнаруживается, подача электроэнергии прекращается или уменьшается. Следовательно, можно исключать ситуацию, в которой электромагнитные волны, сформированные во время бесконтактной подачи электроэнергии, влияют на беспроводную связь системы отпирания дверей без ключа главного транспортного средства 51. Дополнительно, поскольку область обнаружения не расширяется больше, чем требуется, можно предотвращать неправильное функционирование при обнаружении пешехода, проходящего около главного транспортного средства 51, и прекращение или уменьшение подачи электроэнергии. [0043] Как показано на фиг. 6B, когда другое транспортное средство 52 рядом с главным транспортным средством 51 присутствует, система бесконтактной подачи электроэнергии расширяет область обнаружения доплеровского датчика 262 с R1 до R11. То есть, при определении того, что другое транспортное средство 52 припарковано, система бесконтактной подачи электроэнергии расширяет область обнаружения по сравнению со случаем без определения того, что другое транспортное средство 52 припарковано. Следовательно, система бесконтактной подачи электроэнергии обнаруживает пассажира, приближающегося к главному транспортному средству 51 и другому транспортному средству 52, и когда пассажир обнаруживается, система бесконтактной подачи электроэнергии прекращает или уменьшает подачу электроэнергии. Следовательно, можно исключать ситуацию, в которой электромагнитные волны, сформированные во время бесконтактной подачи электроэнергии, влияют на беспроводную связь систем отпирания дверей без ключа главного транспортного средства 51 и другого транспортного средства 52. [0044] Поскольку доплеровские датчики 262 (датчики 26 движущихся объектов) монтируются на главном транспортном средстве 51, главное транспортное средство 51 может обнаруживать другое транспортное средство 52. Можно выполнять высокоточное обнаружение движущегося объекта. Дополнительно, поскольку область R11 обнаружения задается как расстояние, полученное посредством суммирования расстояния D1 расширения с расстоянием D(t) до другого транспортного средства 52, можно обеспечивать обнаружение пассажира, приближающегося к другому транспортному средству 52. [0045] В системе отпирания дверей без ключа, пассажир, носящий портативную машину, приближается к главному транспортному средству и нажимает кнопку запроса, предоставленную около дверной ручки, за счет чего сигнал (LF), имеющий частоту в несколько килогерц, излучается из главного транспортного средства. При приеме сигнала, портативная машина выводит сигнал (UHF), имеющий частоту в несколько гигагерц, и блокирует или разблокирует дверь. Вероятно, что такая система отпирания дверей без ключа нарушается посредством электромагнитных волн, сформированных во время бесконтактной подачи электроэнергии, и вызывает неправильное функционирование. В этом варианте осуществления, когда присутствие пассажира (движущегося объекта), который блокирует или разблокирует дверь транспортного средства, обнаруживается, подача электроэнергии прекращается или уменьшается. Следовательно, можно исключать ситуацию, в которой электромагнитные волны, сформированные во время бесконтактной подачи электроэнергии, влияют на беспроводную связь системы отпирания дверей без ключа. [0046] Пояснение модификации первого варианта осуществления В первом варианте осуществления, поясненном выше, область обнаружения доплеровского датчика 262 изменяется согласно присутствию или отсутствию другого транспортного средства 52 рядом с главным транспортным средством 51. Однако, как показано на фиг. 9, в некоторых случаях, тротуар 32 присутствует сбоку от места для парковки, в котором главное транспортное средство 51 выполняет бесконтактную подачу электроэнергии, и стена 33 присутствует сбоку от тротуара 32. В таком случае, поскольку стена 33 присутствует на внутренней стороне порогового расстояния Dth, стена 33 обнаруживается посредством сонаров 281. Ошибочно распознается, что другое транспортное средство припарковано сбоку от главного транспортного средства 51. Область обнаружения доплеровского датчика 262 задается таким образом, что она расширяется до окрестности стены 33. Пешеход, идущий по тротуару 32, обнаруживается в качестве движущегося объекта. Следовательно, вероятно, что возникает неправильное функционирование для прекращения или уменьшения подачи электроэнергии. [0047] В модификации, предоставляется переключатель признания недостоверности (не показан на чертеже) для признания недостоверным обнаружения посредством доплеровских датчиков 262. Когда переключатель признания недостоверности работает, обнаружение движущегося объекта не выполняется, и области обнаружения доплеровских датчиков 262 не изменяются. То есть, область обнаружения доплеровских датчиков 262 поддерживается в R1, показанной на фиг. 6A. Следовательно, можно предотвращать возникновение неправильного функционирования. [0048] Пояснение второго варианта осуществления В дальнейшем поясняется второй вариант осуществления настоящего изобретения. Фиг. 10 является блок–схемой, показывающей конфигурацию системы бесконтактной подачи электроэнергии согласно второму варианту осуществления. Как показано на фиг. 10, второй вариант осуществления отличается от первого варианта осуществления тем, что датчик 26 движущихся объектов предоставляется в устройстве 101 подачи электроэнергии, и датчик 26 движущихся объектов не предоставляется в устройстве 201 приема электроэнергии. То есть, как показано на фиг. 11, доплеровские датчики 262 (датчики 26 движущихся объектов) предоставляются около катушки 12 для передачи электроэнергии, чтобы обнаруживать движущийся объект, приближающийся к главному транспортному средству 51. Другие компоненты являются идентичными компонентам в первом варианте осуществления, поясненном выше. Аналогично первому варианту осуществления, помимо доплеровских датчиков 262, камеры могут использоваться в качестве датчиков 26 движущихся объектов. [0049] Во втором варианте осуществления, когда объект, присутствующий около главного транспортного средства 51, обнаруживается, и расстояние до объекта дополнительно обнаруживается посредством датчика 28 расстояния, эти данные расстояния передаются из модуля 23 беспроводной связи в наземный контроллер 11. Наземный контроллер 11 определяет, на основе расстояния до объекта, присутствует ли другое транспортное средство 52 рядом с главным транспортным средством 51. Дополнительно, когда другое транспортное средство 52 присутствует, наземный контроллер 11 изменяет область обнаружения доплеровского датчика 262. [0050] В частности, аналогично первому варианту осуществления, поясненному выше, при определении на основе результата обнаружения датчика 28 расстояния того, что другое транспортное средство 52 рядом с главным транспортным средством 51 отсутствует, наземный контроллер 11 задает область обнаружения доплеровского датчика 262 как область R1, как показано на фиг. 6A. С другой стороны, при определении, что другое транспортное средство 52 присутствует, наземный контроллер 11 расширяет область обнаружения доплеровского датчика 262 и задает область обнаружения как R11, как показано на фиг. 6B. [0051] Следовательно, аналогично первому варианту осуществления, поясненному выше, можно исключать ситуацию, в которой электромагнитные волны, сформированные во время бесконтактной подачи электроэнергии, влияют на беспроводную связь системы отпирания дверей без ключа главного транспортного средства 51 или другого транспортного средства 52. Поскольку доплеровские датчики 262 устанавливаются на земле, необязательно устанавливать доплеровские датчики 262 на стороне транспортного средства. Можно уменьшать компоненты, смонтированные на транспортном средстве. [0052] Пояснение третьего варианта осуществления В дальнейшем поясняется третий вариант осуществления настоящего изобретения. Третий вариант осуществления отличается от первого варианта осуществления тем, что движущийся объект обнаруживается, и подача электроэнергии прекращается или уменьшается, и после этого, когда движущийся объект не обнаруживается, подача электроэнергии возвращается к нормальной подаче электроэнергии после истечения предварительно определенного времени прерывания вместо возвращения сразу к нормальной подаче электроэнергии. Поскольку конфигурация системы является идентичной конфигурации, показанной на фиг. 1, поясненной в первом варианте осуществления, пояснение конфигурации опускается. [0053] В нижеприведенном пояснении, поясняется процедура обработки системы бесконтактной подачи электроэнергии согласно третьему варианту осуществления со ссылкой на блок–схему последовательности операций способа на фиг. 12. Во–первых, на этапе S41, контроллер 24 транспортного средства задает значение n счетчика прерываний, поясненное ниже, равным “0”. [0054] Затем, на этапе S42, контроллер 24 транспортного средства определяет, на основе обнаруживаемых данных сонаров 281 (датчиков 28 расстояния), присутствует или нет объект около главного транспортного средства 51. Когда объект присутствует, контроллер 24 транспортного средства дополнительно измеряет расстояние D(t) до объекта. Следует отметить, что "t" указывает время определения расстояния. [0055] На этапе S43, контроллер 24 транспортного средства определяет, меньше или нет расстояние D(t) предварительно установленного порогового расстояния Dth. Пороговое расстояние Dth может задаваться на основе расстояния до другого транспортного средства, припаркованного рядом с главным транспортным средством 51. [0056] Когда “D(t)≥Dth” ("Нет" на этапе S43), поскольку объект отсутствует в пределах расстояния Dth от главного транспортного средства 51, на этапе S45, контроллер 24 транспортного средства определяет, что другое транспортное средство рядом с главным транспортным средством 51 отсутствует. [0057] Когда “D(t) [0058] Когда разность превышает пороговое значение Dchg определения изменений ("Да" на этапе S44), поскольку объект, обнаруженный посредством сонаров 281, перемещается и не представляет собой транспортное средство, припаркованное около главного транспортного средства 51, на этапе S46, контроллер 24 транспортного средства определяет, что другое транспортное средство рядом с главным транспортным средством 51 отсутствует. [0059] С другой стороны, когда разность не превышает пороговое значение Dchg определения изменений ("Нет" на этапе S44), объект останавливается. На этапе S47, контроллер 24 транспортного средства определяет, что другое транспортное средство рядом с главным транспортным средством 51 присутствует. [0060] При определении на этапе S45 или S46 того, что другое транспортное средство отсутствует, на этапе S48, контроллер 24 транспортного средства задает области обнаружения доплеровских датчиков 262 (датчиков 26 движущихся объектов) как области R1 обнаружения (см. фиг. 6A) в пределах нормального расстояния D0 обнаружения. [0061] При определении на этапе S47 того, что другое транспортное средство присутствует, на этапе S49, контроллер 24 транспортного средства задает область обнаружения доплеровского датчика 262 как область R11 обнаружения (см. фиг. 6B) в пределах “D(t)+D1”. “D1” представляет собой расстояние расширения, как показано на фиг. 6B. [0062] На этапе S50, контроллер 24 транспортного средства определяет, обнаруживается или нет движущийся объект (пешеход и т.п.) посредством доплеровских датчиков 262. Когда движущийся объект обнаруживается ("Да" на этапе S50), на этапе S51, контроллер 24 транспортного средства выводит, из модуля 23 беспроводной связи в наземный контроллер 11, сигнал команды для прекращения или уменьшения подачи электроэнергии. Следовательно, подача электроэнергии в катушку 12 для передачи электроэнергии прекращается или уменьшается, и формирование электромагнитных волн подавляется. Следовательно, можно исключать влияние на беспроводную связь системы отпирания дверей без ключа. После этого, на этапе S52, контроллер 24 транспортного средства задает значение n счетчика прерываний, поясненное выше, равным “n=N”. [0063] С другой стороны, когда движущийся объект не обнаруживается в обработке на этапе S50, на этапе S53, контроллер 24 транспортного средства вычитает “1” из значения n счетчика прерываний. В частности, контроллер 24 транспортного средства задает “n=n–1”. После этого, когда n=0, контроллер 24 транспортного средства поддерживает n=0. [0064] На этапе S54, контроллер 24 транспортного средства определяет, равно или нет значение n счетчика прерываний 0. Когда n не равно 0 ("Нет" на этапе S54), контроллер 24 транспортного средства возвращает обработку на этап S42. С другой стороны, когда n равно 0 ("Да" на этапе S54), на этапе S55, контроллер 24 транспортного средства возвращает подачу электроэнергии в катушку 12 для передачи электроэнергии к нормальной подаче электроэнергии. Таким образом, когда подача электроэнергии прекращается или уменьшается, контроллер 24 транспортного средства возвращает подачу электроэнергии к нормальной подаче электроэнергии. После этого, контроллер 24 транспортного средства возвращает обработку на этап S42. [0065] Таким образом, в системе бесконтактной подачи электроэнергии согласно третьему варианту осуществления, когда движущийся объект, такой как пешеход, присутствует около главного транспортного средства 51 или другого транспортного средства 52, посредством прекращения или уменьшения подачи электроэнергии в катушку 12 для передачи электроэнергии, можно уменьшать влияние на беспроводную связь системы отпирания дверей без ключа. Дополнительно, после этого, когда присутствие движущегося объекта не обнаруживается, например, когда пассажир главного транспортного средства 51 перемещается в направлении от главного транспортного средства 51 и перемещается дальше расстояния обнаружения посредством доплеровских датчиков 262, подача электроэнергии в катушку 12 для передачи электроэнергии не возвращается сразу к подаче электроэнергии в нормальное время. Состояние, в котором подача электроэнергии прекращается или уменьшается, продолжается до тех пор, пока значение N счетчика прерываний не снижается до нуля. Следовательно, можно исключать частое изменение передачи электроэнергии. [0066] Пояснение четвертого варианта осуществления В дальнейшем поясняется четвертый вариант осуществления настоящего изобретения. В четвертом варианте осуществления, определяется, на основе обнаруживаемых данных переднего бокового сонара 281c (см. фиг. 2), смонтированного на главном транспортном средстве 51, и обнаруживаемых данных заднего бокового сонара 281d, смонтированного на главном транспортном средстве 51, припарковано или нет другое транспортное средство 52 рядом с главным транспортным средством 51 параллельно главному транспортному средству 51. Области обнаружения доплеровских датчиков 262 (датчиков 26 движущихся объектов) изменяются на основе результата определения. Конфигурация системы является идентичной конфигурации системы, показанной на фиг. 1, поясненной выше. Следовательно, пояснение конфигурации системы опускается. [0067] В дальнейшем поясняется операция системы бесконтактной подачи электроэнергии согласно четвертому варианту осуществления со ссылкой на блок–схему последовательности операций способа на фиг. 13. Фиг. 13 показывает обработку до тех пор, пока область обнаружения доплеровского датчика 262 не задается. [0068] Во–первых, на этапе S61, выполняется определение расстояния посредством переднего бокового сонара 281c и заднего бокового сонара 281d, показанных на фиг. 2. Когда объект присутствует сбоку от главного транспортного средства 51, расстояние D1(t) обнаруживается посредством переднего бокового сонара 281c, и расстояние D2(t) обнаруживается посредством заднего бокового сонара 281d. [0069] На этапе S62, контроллер 24 транспортного средства определяет, меньше или нет расстояние D1(t) порогового расстояния Dth. Таким образом, контроллер 24 транспортного средства определяет, присутствует или нет объект в области вплоть до порогового расстояния Dth впереди сбоку от главного транспортного средства 51. Когда объект отсутствует, контроллер 24 транспортного средства переводит обработку на этап S63. Когда объект присутствует, контроллер 24 транспортного средства переводит обработку на этап S64. [0070] На этапе S63, контроллер 24 транспортного средства определяет, меньше или нет расстояние D2(t) порогового расстояния Dth. Таким образом, контроллер 24 транспортного средства определяет, присутствует или нет объект в области вплоть до порогового расстояния Dth сзади сбоку от главного транспортного средства 51. Когда объект отсутствует, контроллер 24 транспортного средства переводит обработку на этап S66. Когда объект присутствует, контроллер 24 транспортного средства переводит обработку на этап S67. [0071] На этапе S66, контроллер 24 транспортного средства определяет, что другое транспортное средство рядом с главным транспортным средством 51 отсутствует. Таким образом, когда объект не обнаруживается посредством переднего бокового сонара 281c в пределах порогового расстояния Dth, и объект не обнаруживается посредством заднего бокового сонара 281d в пределах порогового расстояния Dth, это означает, что объект отсутствует около главного транспортного средства 51, как показано на фиг. 14A. Следовательно, контроллер 24 транспортного средства определяет, что другое транспортное средство отсутствует. После этого, на этапе S71, контроллер 24 транспортного средства задает области обнаружения доплеровских датчиков 262 как области R1 обнаружения в пределах нормального расстояния D0 обнаружения. [0072] На этапе S67, контроллер 24 транспортного средства определяет, что другое транспортное средство 52 присутствует только рядом с задней частью главного транспортного средства 51. Таким образом, когда объект не обнаруживается посредством переднего бокового сонара 281c в пределах порогового расстояния Dth, и объект обнаруживается посредством заднего бокового сонара 281d в пределах порогового расстояния Dth, контроллер 24 транспортного средства определяет, что другое транспортное средство 52 присутствует сзади сбоку от главного транспортного средства 51, как показано на фиг. 14B. После этого, на этапе S72, контроллер 24 транспортного средства задает область обнаружения доплеровского датчика 262 как область R31 обнаружения на “D2(t)+Dk2” или меньше. “Dk2” представляет собой расстояние расширения и является отрицательным значением. [0073] С другой стороны, на этапе S64, контроллер 24 транспортного средства определяет, удовлетворяется или нет “D2(t) [0074] При определении "Нет" на этапе S64, на этапе S65, контроллер 24 транспортного средства определяет, меньше или нет расстояние D2(t) порогового расстояния Dth. То есть, контроллер 24 транспортного средства определяет, присутствует или нет объект в пределах порогового расстояния Dth сзади сбоку от главного транспортного средства 51. Когда объект отсутствует, контроллер 24 транспортного средства переводит обработку на этап S68. Когда объект присутствует, контроллер 24 транспортного средства переводит обработку на этап S69. [0075] На этапе S68, контроллер 24 транспортного средства определяет, присутствует или нет другое транспортное средство 52 только рядом с передней частью главного транспортного средства 51. Таким образом, когда объект обнаруживается в пределах порогового расстояния Dth посредством переднего бокового сонара 281c, и объект не обнаруживается в пределах порогового расстояния Dth посредством заднего бокового сонара 281d, контроллер 24 транспортного средства определяет то, что другое транспортное средство 52 присутствует впереди сбоку от главного транспортного средства 51, как показано на фиг. 14C. После этого, на этапе S73, контроллер 24 транспортного средства задает область обнаружения доплеровского датчика 262 как область R32 обнаружения, равную или меньшую “D1(t)+Dk1”. “Dk1” представляет собой расстояние расширения. [0076] То есть, область вплоть до расстояния, полученного посредством суммирования Dk1 расстояния расширения с расстоянием D1(t) от главного транспортного средства 51 до другого транспортного средства 52, задается как область R32 обнаружения, когда пассажир другого транспортного средства 52 приближается к другому транспортному средству 52, можно надежно обнаруживать пассажира с помощью доплеровского датчика 262. Можно предотвращать расширение области обнаружения больше, чем требуется. [0077] На этапе S69, контроллер 24 транспортного средства определяет, что другое транспортное средство 52 присутствует рядом с главным транспортным средством 51. В этом случае, поскольку разность между расстоянием D1(t) и расстоянием D2(t) является большой (большей “dD”, описанного выше), как показано на фиг. 14D, другое транспортное средство 52 припарковано под углом к главному транспортному средству 51. После этого, на этапе S74, контроллер 24 транспортного средства задает область обнаружения доплеровского датчика 262 как область R33 обнаружения, равную или меньшую “(D1(t)+D2(t))/2+Dk3”. “Dk3” представляет собой расстояние расширения. [0078] Таким образом, контроллер 24 транспортного средства вычисляет среднее расстояния D1(t) и расстояния D2(t) и задает область вплоть до расстояния, полученного посредством суммирования расстояния Dk3 расширения со средним, в качестве области R33 обнаружения. Следовательно, когда пассажир другого транспортного средства 52 приближается к другому транспортному средству 52, можно надежно обнаруживать пассажира с помощью доплеровского датчика 262. Можно предотвращать расширение области обнаружения больше, чем требуется. [0079] С другой стороны, при определении "Да" на этапе S64, на этапе S70, контроллер 24 транспортного средства определяет, что другое транспортное средство 52 присутствует рядом параллельно с главным транспортным средством 51, как показано на фиг. 14E. После этого, на этапе S75, контроллер 24 транспортного средства задает область обнаружения доплеровского датчика 262 как область R34 обнаружения, равную или меньшую “D1(t)+Dk4”. “Dk4” представляет собой расстояние расширения. [0080] Таким образом, область вплоть до расстояния, полученного посредством суммирования расстояния Dk4 расширения с расстоянием D1(t) от главного транспортного средства 51 до другого транспортного средства 52, задается как область R34 обнаружения. Следовательно, когда пассажир другого транспортного средства 52 приближается к другому транспортному средству 52, можно надежно обнаруживать пассажира с помощью доплеровского датчика 262. [0081] После этого, аналогично первому варианту осуществления, поясненному выше, когда движущийся объект (пешеход и т.п.) обнаруживается в областях обнаружения доплеровских датчиков 262, установленных надлежащим образом посредством способа, поясненного выше, подача электроэнергии в катушку 12 для передачи электроэнергии прекращается или уменьшается. Таким образом, можно уменьшать формирование электромагнитных волн и избежать электромагнитных волн, влияющих на беспроводную связь системы отпирания дверей без ключа. [0082] Таким образом, в системе бесконтактной подачи электроэнергии согласно четвертому варианту осуществления, когда другое транспортное средство 52 рядом с главным транспортным средством 51 присутствует, области обнаружения доплеровских датчиков 262 изменяются согласно состоянию остановки другого транспортного средства 52. В частности, области обнаружения доплеровских датчиков 262 задаются надлежащим образом, соответственно, когда другое транспортное средство 52 присутствует в задней части главного транспортного средства 51, как показано на фиг. 14B, когда другое транспортное средство 52 присутствует перед главным транспортным средством 51, как показано на фиг. 14C, когда другое транспортное средство 52 присутствует под углом к главному транспортному средству 51, как показано на фиг. 14D, и когда другое транспортное средство 52 присутствует параллельно главному транспортному средству 51, как показано на фиг. 14E. [0083] Следовательно, можно более надежно исключать неправильное функционирование в то время, когда пассажиры главного транспортного средства и другого транспортного средства оперируют системой отпирания дверей без ключа, без влияния посредством состояния остановки другого транспортного средства 52. [0084] Пояснение пятого варианта осуществления В дальнейшем поясняется пятый вариант осуществления настоящего изобретения. В пятом варианте осуществления, предоставляется камера 31 для фотографирования транспортного средства, которая фотографирует периферию главного транспортного средства в месте 2 для парковки. Присутствие или отсутствие другого транспортного средства 52 рядом с главным транспортным средством 51 определяется на основе изображения, сфотографированного посредством камеры 31 для фотографирования транспортного средства. Фиг. 15 является блок–схемой, показывающей конфигурацию системы бесконтактной подачи электроэнергии согласно пятому варианту осуществления. Фиг. 16 является пояснительной схемой, показывающей состояние, в котором все место 2 для парковки фотографируется с использованием камеры 31 для фотографирования транспортного средства. Пятый вариант осуществления отличается от фиг. 1 тем, что устройство 102 подачи электроэнергии включает в себя камеру 31 для фотографирования транспортного средства, которое фотографирует место 2 для парковки, и устройство 202 приема электроэнергии не включает в себя датчики 28 расстояния. Другие компоненты являются идентичными компонентам, показанным на фиг. 1. Следовательно, компоненты обозначаются посредством идентичных ссылок с номерами и знаков. Пояснение компонентов опускается. [0085] Как показано на фиг. 16, можно фотографировать главное транспортное средство 51 и другое транспортное средство 52 с помощью камеры 31 для фотографирования транспортного средства. Наземный контроллер 11 анализирует изображение, сфотографированное посредством камеры 31 для фотографирования транспортного средства, и определяет, присутствует или нет другое транспортное средство 52 рядом с главным транспортным средством 51. [0086] Аналогично первому варианту осуществления, поясненному выше, наземный контроллер 11 задает области обнаружения доплеровских датчиков 262 на основе присутствия или отсутствия другого транспортного средства 52. В частности, как показано на фиг. 6A, когда другое транспортное средство 52 отсутствует, области обнаружения доплеровских датчиков 262 задаются как R1. Как показано на фиг. 6B, когда другое транспортное средство 52 присутствует, область обнаружения доплеровского датчика 262 задается как R11. Следовательно, можно получать преимущества, идентичные преимуществам первого варианта осуществления, поясненного выше. [0087] Таким образом, в системе бесконтактной подачи электроэнергии согласно пятому варианту осуществления, другое транспортное средство 52 рядом с главным транспортным средством 51 обнаруживается с использованием камеры 31 для фотографирования транспортного средства, которая фотографирует все место 2 для парковки. Следовательно, необязательно предоставлять датчик 28 расстояния, такой как сонар 281. Можно уменьшать устройства и компоненты, смонтированные на главном транспортном средстве 51. [0088] Пояснение шестого варианта осуществления В дальнейшем поясняется шестой вариант осуществления настоящего изобретения. В шестом варианте осуществления, передняя часть, боковые части и задняя часть главного транспортного средства 51 обнаруживаются с использованием камер 282 (282a–282c), показанных на фиг. 3, в качестве датчиков 28 расстояния, которые обнаруживают объект около главного транспортного средства 51. Конфигурация системы является идентичной конфигурации системы бесконтактной подачи электроэнергии, показанной на фиг. 1, поясненной выше. Следовательно, пояснение конфигурации системы опускается. Обработка, выполняемая, когда другое транспортное средство 52 рядом сбоку от главного транспортного средства 51, присутствует, является идентичной обработке в первом варианте осуществления, поясненном выше. [0089] В шестом варианте осуществления, определяется, с использованием камеры 282a переднего вида (см. фиг. 3), присутствует или нет другое транспортное средство перед главным транспортным средством 51. Когда другое транспортное средство отсутствует, обнаруживаемые данные доплеровского датчика 262, которые обнаруживают переднюю часть главного транспортного средства 51, признаются недостоверными. Таким образом, даже когда движущийся объект обнаруживается перед главным транспортным средством 51, результат обнаружения движущегося объекта признается недостоверным. [0090] В нижеприведенном пояснении, поясняется операция шестого варианта осуществления со ссылкой на блок–схему последовательности операций способа на фиг. 17 и пояснительные схемы на фиг. 18A и фиг. 18B. Во–первых, на этапе S81, контроллер 24 транспортного средства получает изображение передней части главного транспортного средства 51, сфотографированной посредством камеры 282a переднего вида (датчика 28 расстояния). [0091] На этапе S82, контроллер 24 транспортного средства анализирует изображение передней части и определяет, присутствует или нет другое транспортное средство перед главным транспортным средством 51. [0092] Когда другое транспортное средство присутствует ("Да" на этапе S82), контроллер 24 транспортного средства переводит обработку на этап S83. Когда другое транспортное средство отсутствует ("Нет" на этапе S82), контроллер 24 транспортного средства переводит обработку на этап S86. [0093] На этапе S83, контроллер 24 транспортного средства определяет, меньше или нет расстояние D(t) до другого транспортного средства спереди, чем пороговое расстояние Dth. [0094] Когда “D(t) [0095] После этого, на этапе S85, контроллер 24 транспортного средства определяет, на основе обнаруживаемых данных доплеровских датчиков 262, то, присутствует или нет движущийся объект между главным транспортным средством 51 и другим транспортным средством 52. Например, когда пассажир P12 (движущийся объект), который оперирует системой отпирания дверей без ключа позади другого транспортного средства 52, присутствует, как показано на фиг. 18A, присутствие пассажира P12 обнаруживается. Когда пассажир P12 обнаруживается, на этапе S88, контроллер 24 транспортного средства передает сигнал команды управления для прекращения или уменьшения подачи электроэнергии в наземный контроллер 11. Наземный контроллер 11 прекращает или уменьшает подачу электроэнергии в катушку 12 для передачи электроэнергии. [0096] Следовательно, когда пассажир P12 другого транспортного средства 52 оперирует системой отпирания дверей без ключа, можно исключать ситуацию, в которой работа системы отпирания дверей без ключа влияет на беспроводной сигнал. Когда движущийся объект не обнаруживается перед главным транспортным средством 51 ("Нет" на этапе S85), на этапе S89, контроллер 24 транспортного средства возвращает подачу электроэнергии к нормальной подаче электроэнергии. [0097] С другой стороны, когда определяется, что другое транспортное средство отсутствует перед главным транспортным средством 51 ("Нет" на этапе S82), или когда расстояние до едущего впереди транспортного средства превышает пороговое расстояние Dth ("Нет" на этапе S83), на этапе S86, контроллер 24 транспортного средства определяет, что транспортное средство отсутствует перед главным транспортным средством 51. [0098] Дополнительно, на этапе S87, контроллер 24 транспортного средства признает недостоверным обнаружение движущегося объекта перед главным транспортным средством 51. Таким образом, когда транспортное средство отсутствует перед главным транспортным средством 51, как показано на фиг. 18B, контроллер 24 транспортного средства признает недостоверным обнаружение движущегося объекта в области R3 обнаружения (см. фиг. 5) впереди посредством доплеровского датчика 262. Следовательно, например, когда пешеход P11 идет по тротуару перед главным транспортным средством 51, показанным на фиг. 18B, можно предотвращать возникновение неправильного функционирования при обнаружении пешехода P11 в качестве движущегося объекта и прекращение или уменьшение подачи электроэнергии. [0099] Таким образом, в системе бесконтактной подачи электроэнергии согласно шестому варианту осуществления, передняя часть и боковые части главного транспортного средства 51 задаются в качестве областей обнаружения для движущегося объекта. Следовательно, когда пассажир P12 другого транспортного средства 52, припаркованного перед главным транспортным средством 51, оперирует системой отпирания дверей без ключа, например, в задней двери, можно исключать ситуацию, в которой работа системы отпирания дверей без ключа влияет на беспроводной сигнал. Дополнительно, когда главное транспортное средство 51 припарковано в месте для парковки, обращенном к такой области, как тротуар, через которую проходят множество пешеходов, обнаружение движущегося объекта перед главным транспортным средством 51 признается недостоверным. Следовательно, можно предотвращать неправильное функционирование при обнаружении пешехода на пешеходом переходе и прекращение или уменьшение подачи электроэнергии. [0100] Выше поясняются способ для управления системой бесконтактной подачи электроэнергии и система бесконтактной подачи электроэнергии настоящего изобретения на основе проиллюстрированных вариантов осуществления. Тем не менее, настоящее изобретение не ограничено этим. Компоненты могут заменяться любыми компонентами, имеющими идентичные функции. Список номеров ссылок [0101] 2 – место для парковки 11 – наземный контроллер 12 – катушка для передачи электроэнергии 22 – катушка для приема электроэнергии 23 – модуль беспроводной связи 24 – контроллер транспортного средства 25 – модуль выпрямления 26 – датчик движущихся объектов 27 – аккумулятор 28 – датчик расстояния 31 – камера для фотографирования транспортного средства 32 – тротуар 33 – стена 51 – главное транспортное средство 52 – другое (другое) транспортное средство 100, 101, 102 – устройство подачи электроэнергии 200, 201, 202 – устройство приема электроэнергии 262 – доплеровский датчик 281 – сонар 281a – передний сонар 281b – передний угловой сонар 281c – передний боковой сонар 281d – задний боковой сонар 281e – задний угловой сонар 281f – задний сонар 282 – камера 282a – камера переднего вида 282b – боковая камера 282c – камера заднего вида C1 – центральная линия P1 – пассажир P2 – пассажир P11 – пешеход P12 – пассажир
Реферат
Изобретение относится к области электротехники, в частности к системам бесконтактной подачи электроэнергии. Технический результат заключается в устранении возможного нарушения беспроводной связи системы отпирания дверей без ключа главного транспортного средства. Достигается тем, что система бесконтактной подачи электроэнергии обеспечена: сонаром, который обнаруживает, имеется или нет другое транспортное средство, припаркованное около главного транспортного средства; доплеровским датчиком, который обнаруживает, имеется или нет движущийся объект, такой как пешеход, около главного транспортного средства; и наземным контроллером, который прекращает или уменьшает бесконтактную подачу электроэнергии, когда доплеровский датчик обнаруживает движущийся объект. Область обнаружения доплеровского датчика расширяется больше, когда парковка другого транспортного средства обнаруживается, чем когда парковка другого транспортного средства не обнаруживается. Таким образом, можно предотвращать влияние электромагнитной волны, сформированной во время бесконтактной подачи электроэнергии, на беспроводную связь системы отпирания дверей без ключа. 2 н. и 6 з.п. ф-лы, 25 ил.
Формула
Документы, цитированные в отчёте о поиске
Система бесконтактной подачи электрической мощности и устройство подачи электрической мощности
Комментарии