Система управления зарядом аккумулятора для автоматически управляемого транспортного средства и способ управления зарядом аккумулятора для автоматически управляемого транспортного средства - RU2569676C1
Код документа: RU2569676C1
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Данное изобретение относится к системе управления зарядом аккумулятора и способу управления зарядом аккумулятора автоматически управляемого транспортного средства, которое движется без водителя посредством использования электрической мощности смонтированного аккумулятора в качестве источника питания для приведения в движение и заряжает аккумулятор в зарядной станции.
УРОВЕНЬ ТЕХНИКИ
[0002] JP 2007-74800 A, опубликованная Патентным бюро Японии в 2007 году, предлагает устройство управления зарядом автоматически управляемого транспортного средства, имеющего никель-водородный аккумулятор или литий-ионный аккумулятор, который может быть использован в режиме частичного заряда/разряда в качестве аккумулятора, и узел управления зарядом, который начинает заряд, когда оставшаяся величина заряда аккумулятора достигает величины для начала заряда, и прекращает заряд, когда оставшаяся величина достигает величины для прекращения заряда.
[0003] В сборочной технологической линии, например, в общем, используются множественные автоматически управляемые транспортные средства, которые движутся по маршруту движения по определенной орбитальной дорожке. Каждое транспортное средство загружает сборочные компоненты на станции выборки и комплектования, транспортирует их на сборочную станцию и разгружает их на сборочной станции и затем возвращается на станцию выборки и комплектования снова. Множественные автоматически управляемые транспортные средства последовательно управляются таким образом, что они совершают перемещение по замкнутой траектории между станцией выборки и комплектования и сборочной станцией, чтобы последовательно подавать сборочные компоненты, необходимые на сборочной станции. В множественных автоматически управляемых транспортных средствах, последовательно управляемых таким способом, необходимо заряжать аккумулятор с использованием автоматического зарядного устройства зарядной станции каждый раз, когда оставшаяся величина смонтированного аккумулятора снижается до предварительно определенной величины для начала заряда, как описано в предшествующем уровне техники. По этой причине автоматическое зарядное устройство зарядной станции сконфигурировано с возможностью непрерывно принимать электрическую мощность и периодически выполнять операцию заряда для каждого автоматически управляемого транспортного средства, которое должно быть заряжено. Как результат, для того чтобы заряжать автоматически управляемые транспортные средства, необходимо непрерывно подавать электрическую мощность в автоматическое зарядное устройство зарядной станции, чтобы поддерживать определенную величину электрической мощности. Соответственно, затруднительно подавлять потребление мощности в конкретное предварительно определенное время.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Следовательно, с учетом вышеуказанных проблем цель этого изобретения состоит в том, чтобы предоставлять систему управления зарядом аккумулятора и способ управления зарядом аккумулятора для автоматически управляемого транспортного средства, подходящие для подавления электрической мощности, подаваемой в зарядное устройство аккумулятора в конкретное предварительно определенное время.
[0005] Согласно аспекту этого изобретения предоставляется система управления зарядом аккумулятора для автоматически управляемого транспортного средства, которое движется без водителя посредством использования аккумулятора в качестве источника питания для приведения в движение и выполняет операцию заряда с использованием зарядного устройства аккумулятора. Система управления зарядом аккумулятора содержит узел отслеживания заряда/разряда, который отслеживает величину заряда/разряда аккумулятора, и узел задания порогового напряжения ненужности заряда, который задает пороговое напряжение ненужности заряда для аккумулятора. Система управления зарядом аккумулятора дополнительно содержит узел управления зарядом, который выполняет операцию заряда для аккумулятора с использованием зарядного устройства аккумулятора, когда определяется, что напряжение аккумулятора автоматически управляемого транспортного средства, приезжающего на зарядную станцию, ниже порогового напряжения ненужности заряда, заданного посредством узла задания порогового напряжения ненужности заряда. Узел задания порогового напряжения ненужности заряда выполнен с возможностью понижать заданное пороговое напряжение ненужности заряда в течение конкретного заданного периода времени.
[0006] Подробности, а также другие признаки и преимущества этого изобретения изложены в оставшейся части подробного описания и показаны на прилагаемых чертежах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
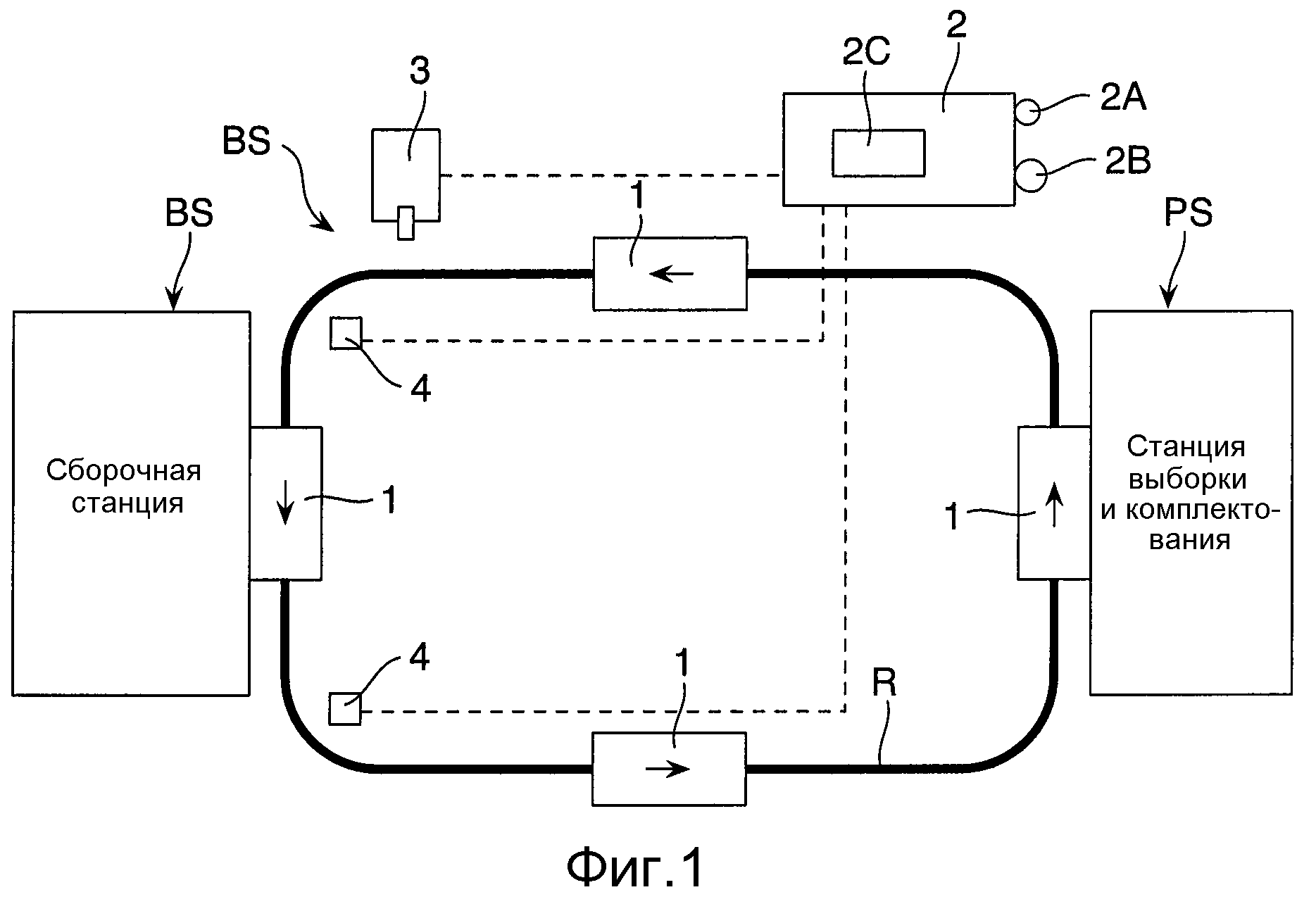
[0007] Фиг. 1 является принципиальной схемой, иллюстрирующей примерный маршрут движения автоматически управляемого транспортного средства согласно варианту осуществления этого изобретения.
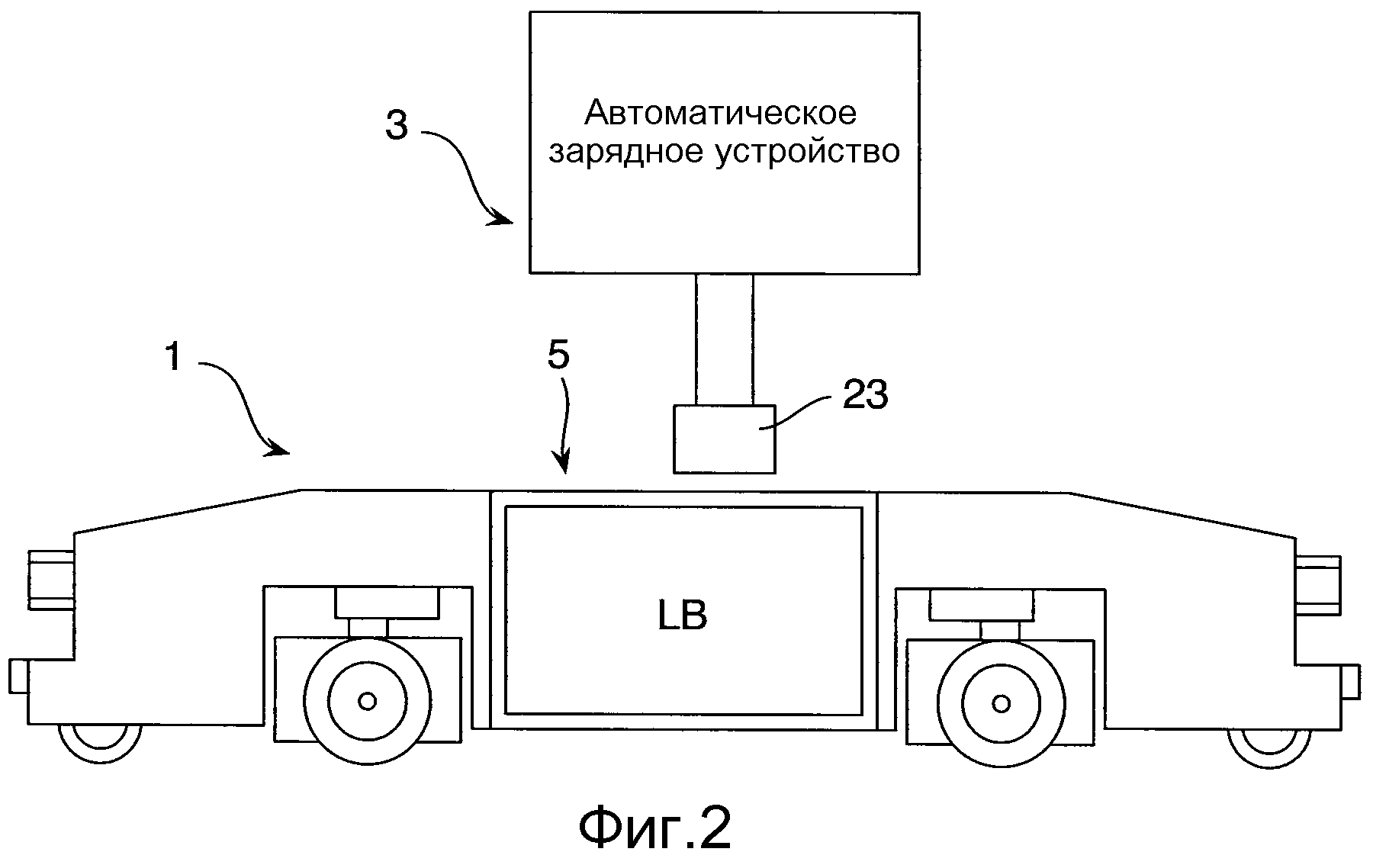
Фиг. 2 является схематичным видом сбоку автоматически управляемого транспортного средства и автоматического зарядного устройства аккумулятора зарядной станции.
Фиг. 3 является принципиальной схемой, иллюстрирующей соединение между аккумулятором автоматически управляемого транспортного средства и зарядным устройством аккумулятора зарядной станции в ходе операции заряда.
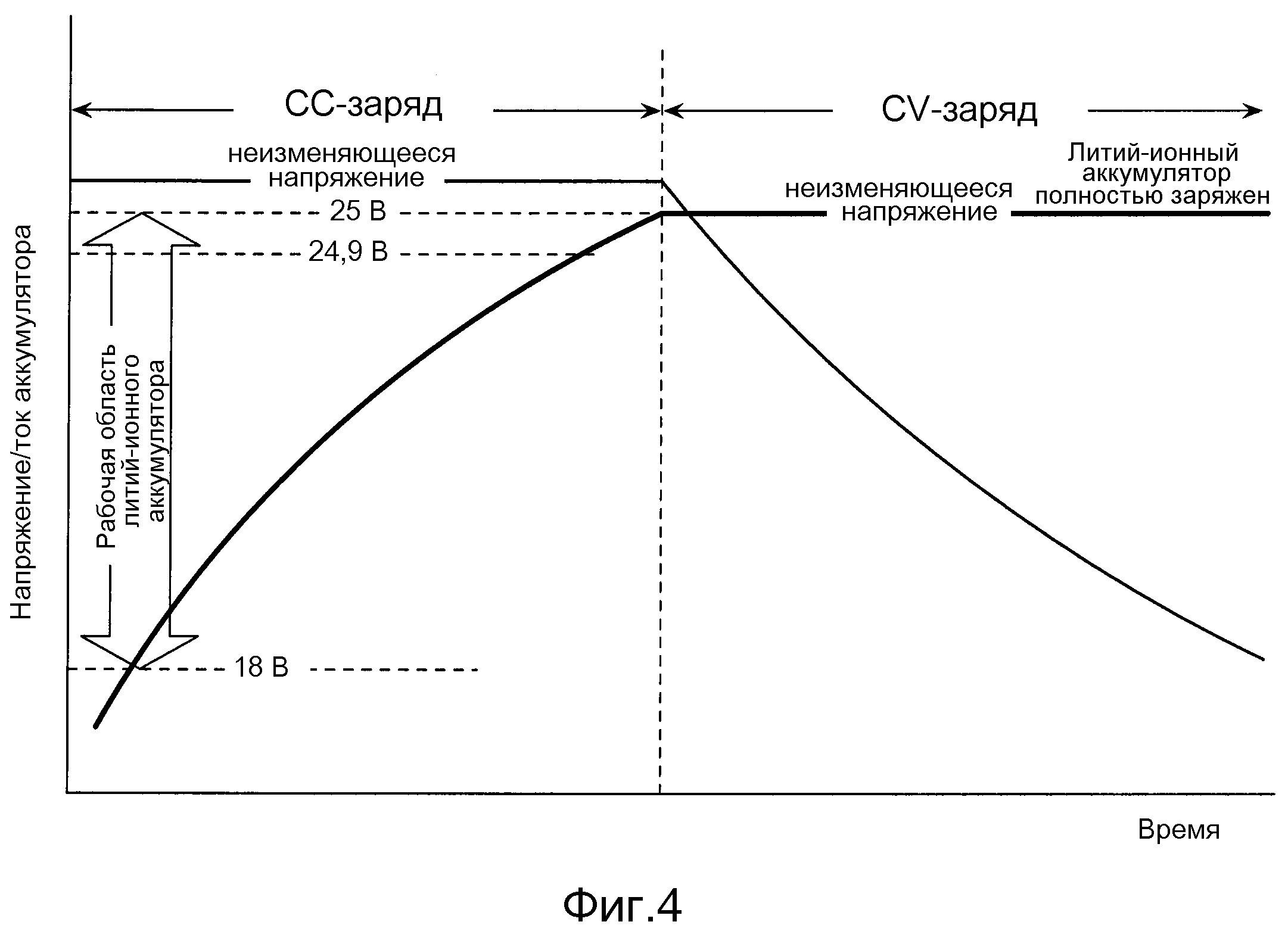
Фиг. 4 является схемой, иллюстрирующей изменение напряжения аккумулятора относительно изменения подаваемого зарядного тока в ходе операции заряда аккумулятора.
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей первую примерную процедуру управления зарядом аккумулятора.
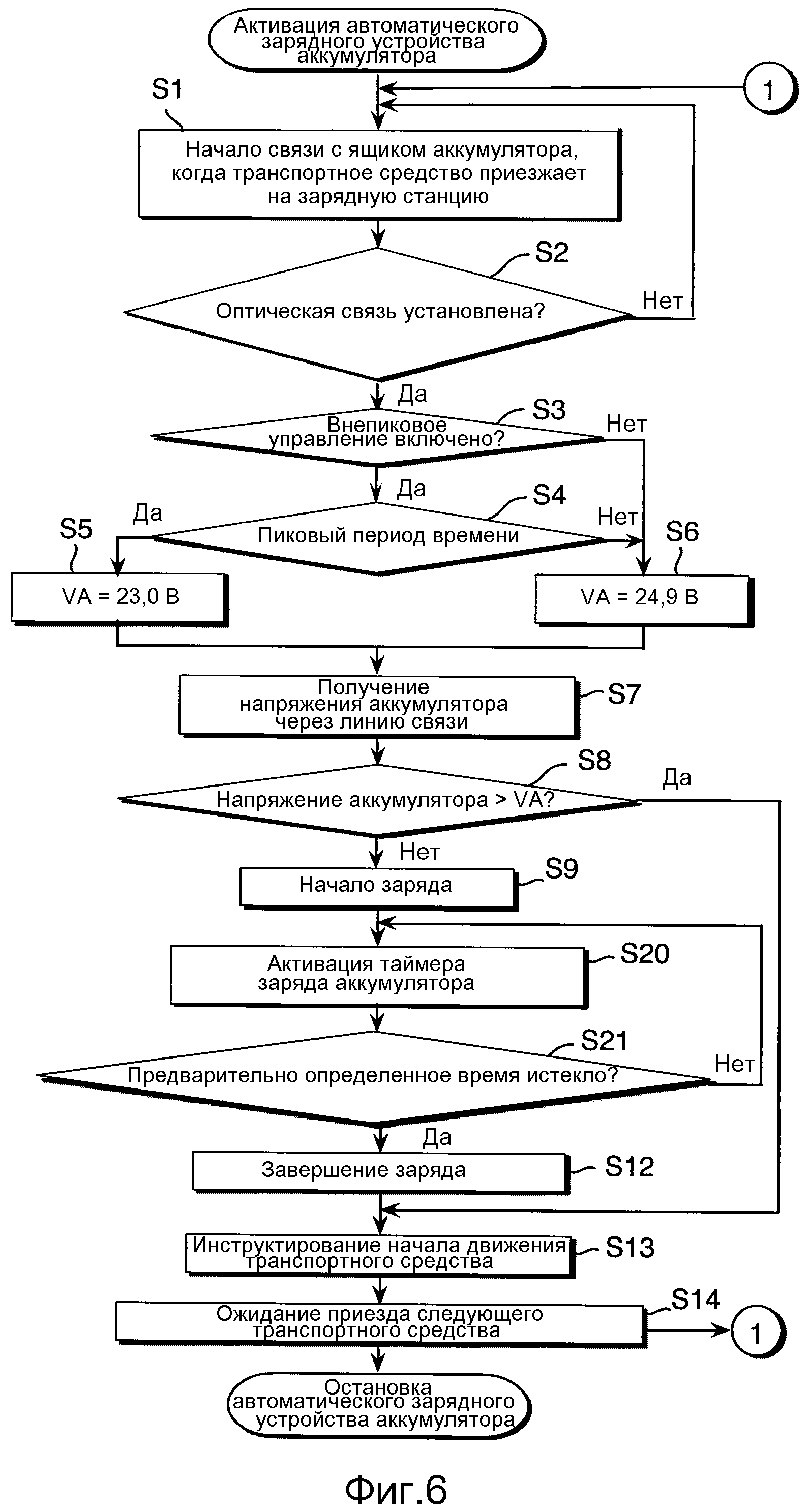
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей вторую примерную процедуру управления зарядом аккумулятора.
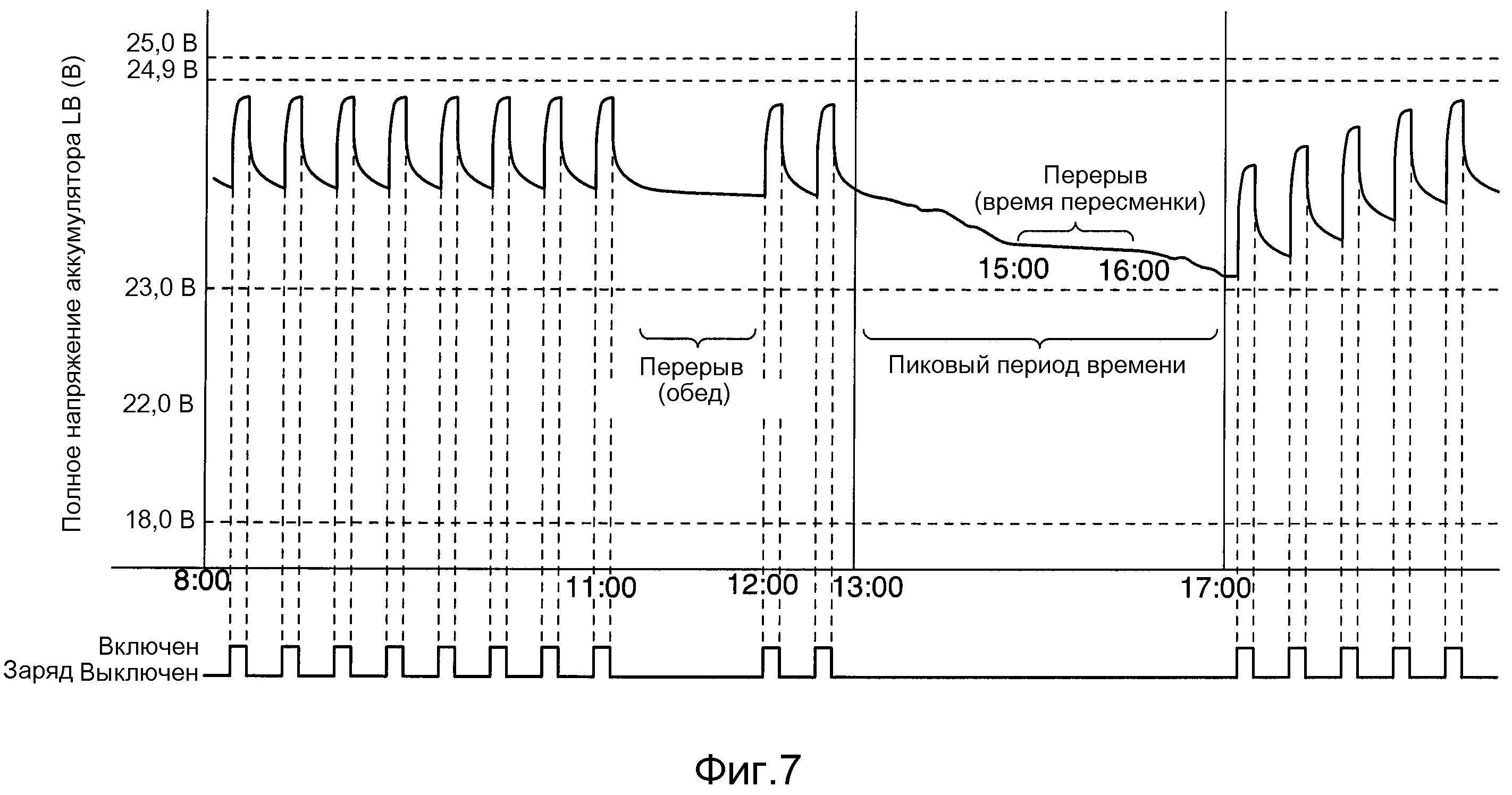
Фиг. 7 является временной диаграммой, иллюстрирующей изменение напряжения аккумулятора в управлении зарядом аккумулятора в качестве результата выполнения второй примерной процедуры управления зарядом аккумулятора.
Подробное описание предпочтительных вариантов осуществления
[0008] Ниже описывается система управления зарядом аккумулятора для автоматически управляемого транспортного средства согласно варианту осуществления этого изобретения.
[0009] Маршрут движения в процессе доставки, используемом посредством автоматически управляемого транспортного средства 1, содержит, например, маршрут R движения по орбитальной дорожке, заданный так, чтобы проходить через станцию PS выборки и комплектования и сборочную станцию BS сборочной технологической линии, как проиллюстрировано на фиг. 1. В процессе доставки множественные автоматически управляемые транспортные средства 1 выполнены с возможностью двигаться по этому маршруту R движения, и устройство 2 управления на стороне оборудования управляет движением каждого автоматически управляемого транспортного средства 1.
[0010] Компоненты, используемые на сборочной станции BS, загружаются в каждое автоматически управляемое транспортное средство 1 на станции PS выборки и комплектования, и каждое автоматически управляемое транспортное средство 1 движется по маршруту R движения, чтобы доставлять компоненты на сборочную станцию BS. На сборочной станции BS компоненты разгружаются, и каждое автоматически управляемое транспортное средство 1 движется по маршруту R движения снова, чтобы возвращаться на станцию PS выборки и комплектования, так что это перемещение по замкнутой траектории повторяется. Зарядная станция CS, имеющая автоматическое зарядное устройство 3, управляемое посредством устройства 2 управления на стороне оборудования, размещается, например, около сборочной станции BS на маршруте R движения. Помимо этого, стационарная станция 4, которая передает/принимает сигналы в автоматически управляемое транспортное средство 1 и устройство 2 управления на стороне оборудования, предоставляется, например, во входе и выходе сборочной станции BS.
[0011] Ссылаясь на фиг. 2 и 3, каждое автоматически управляемое транспортное средство 1 содержит ящик 5 для аккумулятора, который монтируется, например, в центре кузова транспортного средства и размещает аккумулятор LB, сформированный из аккумуляторной батареи (например, литий-ионной аккумуляторной батареи), и монитор (узел отслеживания) 11 заряда/разряда, который отслеживает состояние аккумулятора LB. Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора LB в качестве источника питания для приведения в движение. Аккумулятор LB сконструирован посредством множественных аккумуляторных модулей BM (например, трех, как проиллюстрировано на фиг. 3), подключенных последовательно с использованием шинной системы BB. Каждый аккумуляторный модуль BM, имеющий напряжение состояния заряда приблизительно в 8 В, сконструирован посредством множественных параллельно или последовательно подключенных литий-ионных единичных гальванических элементов. По этой причине выходное напряжение аккумулятора LB становится равным приблизительно 25 В, когда аккумулятор LB полностью заряжен. Соответственно, напряжение избыточного заряда аккумулятора LB задается равным, например, 25 В, и напряжение избыточного разряда задается равным, например, 18 В. Напряжение для определения необходимости и ненужности операции заряда задается равным значению между напряжением избыточного заряда и напряжением избыточного разряда и, например, в 24,9 В. Операция заряда требуется, когда напряжение аккумулятора ниже этого напряжения. Операция заряда не требуется, когда напряжение аккумулятора выше этого напряжения. Таким образом, можно не допускать достижения, посредством напряжения аккумулятора, напряжения избыточного разряда, при котором начинается ухудшение характеристик аккумулятора LB, и защищать аккумулятор посредством задания разности напряжений между напряжением избыточного разряда и напряжением для определения начала заряда или завершения заряда равной достаточно большому значению.
[0012] Приемный контактор 13, доступный на внешней поверхности ящика 5 для аккумулятора, подключается к концу линии 12 питания аккумулятора LB. Питающий контактор 23, выдвижной/втягиваемый в/из автоматического зарядного устройства 3 зарядной станции CS, подключается к приемному контактору 13, так что может заряжаться аккумулятор LB.
[0013] Состояние заряда аккумулятора LB, сформированного из литий-ионного аккумулятора, отслеживается/вычисляется посредством монитора 11 заряда/разряда, как проиллюстрировано на фиг. 3. Монитор 11 заряда/разряда управляется с возможностью отслеживать и сохранять величину заряда/разряда аккумулятора LB (напряжение аккумулятора), напряжение гальванического элемента, величину тока (ампер-час, AH) ввода-вывода аккумулятора LB, предысторию отказов аккумулятора LB и т.п. через каждый предварительно определенный временной интервал (например, 10 мс). Монитор 11 заряда/разряда может передавать эту информацию в устройство 2 управления на стороне оборудования через стационарную станцию 4 и автоматическое зарядное устройство 3 с использованием узла 14 связи (например, оптической связи).
[0014] Когда напряжение любого гальванического элемента аккумулятора LB имеет состояние избыточного разряда, равное или ниже порогового значения выключения (например, 2,8-3 В), монитор 11 заряда/разряда управляется с возможностью отображать тот факт, что аккумулятор LB находится в состоянии отказа, и выключать (анормально останавливать) автоматически управляемое транспортное средство 1. Заданное значение порогового значения выключения может быть изменено и типично задается равным, например, 3,0 В. Тем не менее, пороговое значение выключения задается равным более низкому заданному значению (например, 2,8 В) в момент, когда транспортное средство проходит через сборочную станцию BS маршрута R движения, чтобы подавлять операцию выключения в области сборочной станции BS. В частности, автоматически управляемое транспортное средство 1 изменяет заданное значение с 3,0 В на 2,8 В, когда команда запрещения выключения принимается из стационарной станции 4, предоставленной во входе сборочной станции BS по маршруту R движения, с использованием узла связи. Помимо этого, автоматически управляемое транспортное средство 1 изменяет заданное значение с 2,8 В на 3,0 В, когда команда прекращения запрещения на выключение принимается из стационарной станции 4, предоставленной в выходе сборочной станции BS на маршруте R движения, с использованием узла связи.
[0015] Автоматическое зарядное устройство 3, предоставленное в зарядной станции CS, содержит источник 21 питания постоянного тока, который может повышать напряжение до верхнего предельного напряжения (например, 25 В) аккумулятора LB, узел 20 управления зарядом, который управляет значением зарядного тока и значением зарядного напряжения, подаваемым в аккумулятор LB из источника 21 питания постоянного тока, и узел 24 связи, который может обмениваться данными с узлом 14 связи автоматически управляемого транспортного средства 1.
[0016] Узел 24 связи может обмениваться данными с узлом 14 связи автоматически управляемого транспортного средства 1, чтобы получать величину заряда/разряда (напряжение) аккумулятора LB, величину тока (ампер-час, AH) ввода-вывода аккумулятора LB, предысторию отказов аккумулятора LB, другие сигналы инструкций и т.п.
[0017] Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора LB в качестве источника питания для приведения в движение. Напряжение снижается посредством разряда аккумулятора LB по мере того, как движется транспортное средство. По этой причине автоматически управляемое транспортное средство 1 временно останавливается, когда оно проходит через зарядную станцию CS и проверяет величину заряда/разряда аккумулятора LB автоматически управляемого транспортного средства 1 с использованием узлов 14 и 24 связи между автоматически управляемым транспортным средством 1 и автоматическим зарядным устройством 3 зарядной станции CS. На стороне зарядной станции CS определяется то, должно или нет заряжаться напряжение аккумулятора LB в это время (т.е. то, ниже или нет напряжение порогового напряжения ненужности заряда). Если определено то, что требуется заряд, операция заряда выполняется посредством подключения автоматического зарядного устройства 3 к аккумулятору LB автоматически управляемого транспортного средства 1.
[0018] Пороговое напряжение ненужности заряда задается равным, например, 24,9 В, как описано выше. Иными словами, определяется, что заряд требуется, когда напряжение аккумулятора ниже порогового напряжения ненужности заряда. В противном случае, определяется, что заряд не требуется, когда напряжение аккумулятора выше порогового напряжения ненужности заряда. Таким образом, аккумулятор LB защищается таким образом, что не допускается достижение в аккумуляторе LB напряжения избыточного разряда посредством задания разности напряжений между напряжением избыточного разряда и пороговым напряжением ненужности заряда, ниже которого требуется заряд, равной достаточно большому значению.
[0019] В ходе операции заряда питающий контактор 23 и приемный контактор 13 подключаются между собой посредством выдвигания питающего контактора 23 к приемному контактору 13 автоматически управляемого транспортного средства 1. Посредством подтверждения этого состояния подключения определяется, что устанавливается состояние выполнения заряда. Электрическая мощность заряда после этого подается из источника 21 питания постоянного тока в автоматическое зарядное устройство 3.
[0020] Узел 20 управления зарядом выполняет как режим нормального заряда при неизменяющемся токе/неизменяющемся напряжении, так и режим быстрого заряда при неизменяющемся токе/неизменяющемся напряжении, в котором больший зарядный ток по сравнению с зарядным током режима нормального заряда подается в аккумулятор LB, чтобы заряжать аккумулятор LB. Режим быстрого заряда является подходящим для процесса доставки, в котором требуется операция кратковременного заряда. В режиме заряда при неизменяющемся токе/неизменяющемся напряжении операция заряда при неизменяющемся токе (в дальнейшем называемая "CC-зарядом") выполняется на начальной стадии операции заряда, в которой подается неизменяющийся зарядный ток. После того, как напряжение аккумулятора увеличивается до верхнего предела зарядного напряжения (например, 25 В) через операцию заряда, операция заряда при неизменяющемся напряжении (в дальнейшем называемая "CV-зарядом"), при которой напряжение является неизменяющимся, выполняется до тех пор, пока не истечет предварительно определенное время.
[0021] Фиг. 4 иллюстрирует изменение напряжения аккумулятора в ходе операции заряда и изменение подаваемого зарядного тока. Поскольку напряжение аккумулятора постепенно повышается и увеличивается до верхнего предела зарядного напряжения (например, 25 В) через операцию CC-заряда, операция CV-заряда выполняется посредством задания неизменяющегося напряжения до тех пор, пока не истечет предварительно определенное время, в то время как зарядный ток понижается с этого времени. Когда истекает предварительно определенное время, узел 20 управления зарядом прерывает операцию заряда посредством деактивации источника 21 питания постоянного тока.
[0022] Операция заряда может прекращаться в качестве завершения заряда, когда напряжение аккумулятора автоматически управляемого транспортного средства 1 увеличивается до порогового напряжения ненужности заряда посредством выполнения операции CC-заряда. Если операция заряда завершается, когда напряжение аккумулятора увеличивается до порогового напряжения ненужности заряда таким способом, можно опускать операцию CV-заряда, которая выполняется в течение предварительно определенного времени после этого, в силу этого уменьшая время заряда. Поскольку этот способ является подходящим для операции заряда аккумулятора LB автоматически управляемого транспортного средства 1, которое совершает перемещение по замкнутой траектории вокруг маршрута R движения, процедура управления зарядом аккумулятора, проиллюстрированная на фиг. 5, описанной ниже, показывает пример, в котором операция заряда аккумулятора LB автоматически управляемого транспортного средства 1 завершается с использованием этого критерия прекращения заряда. Помимо этого, пороговое напряжение ненужности заряда аккумулятора LB, используемое для того, чтобы начинать и завершать операцию заряда, может быть изменено посредством устройства 2 управления на стороне оборудования.
[0023] Операция заряда может прекращаться в качестве завершения заряда посредством выполнения операции CC-заряда только в течение предварительно определенного времени и увеличения напряжения аккумулятора автоматически управляемого транспортного средства 1 до уровня, соответствующего времени заряда. Если операция заряда завершается, когда напряжение аккумулятора увеличивается до уровня, соответствующего предварительно определенному времени заряда, можно уменьшать время заряда до предварительно определенного времени, так что этот способ является подходящим для операции заряда аккумулятора LB автоматически управляемого транспортного средства 1, которое совершает перемещение по замкнутой траектории вокруг маршрута R движения. По этой причине процедура управления зарядом аккумулятора, проиллюстрированная на фиг. 6, описанной ниже, показывает пример, в котором операция заряда аккумулятора LB автоматически управляемого транспортного средства 1 завершается с использованием этого критерия прекращения заряда. Кроме того, пороговое напряжение ненужности заряда аккумулятора LB, при котором начинается операция заряда, может быть изменено посредством устройства 2 управления на стороне оборудования.
[0024] Когда операция заряда аккумулятора LB завершается в зарядной станции CS, автоматическое зарядное устройство 3 определяет завершение заряда и заставляет питающий контактор 23 убираться, чтобы прерывать соединение с приемным контактором 13 автоматически управляемого транспортного средства 1. Когда соединение между контакторами 13 и 23 прерывается, автоматически управляемое транспортное средство 1 отъезжает от зарядной станции CS и движется вдоль маршрута R движения.
[0025] Между тем, множественные автоматически управляемые транспортные средства 1, описанные выше, последовательно управляются таким образом, что они совершают перемещение по замкнутой траектории между станцией PS выборки и комплектования и сборочной станцией BS, чтобы последовательно подавать сборочные компоненты, требуемые на сборочной станции BS. Требуется заряжать множественные автоматически управляемые транспортные средства 1, последовательно управляемые таким способом с использованием автоматического зарядного устройства 3 зарядной станции CS, каждый раз, когда оставшаяся величина смонтированного аккумулятора LB становится равной или меньшей определенного предварительно определенного порогового напряжения ненужности заряда. По этой причине автоматическое зарядное устройство 3 зарядной станции CS должно принимать электрическую мощность, с тем чтобы заряжать каждое автоматически управляемое транспортное средство 1, которое должно периодически заряжаться. Как результат, возникает проблема в том, что затруднительно подавлять потребление мощности в течение конкретного периода времени, поскольку необходимо непрерывно поддерживать определенную величину электрической мощности в любом случае без прерывания подачи питания в автоматическое зарядное устройство 3 зарядной станции CS, чтобы заряжать аккумулятор автоматически управляемого транспортного средства 1.
[0026] Система управления зарядом аккумулятора автоматически управляемого транспортного средства согласно этому варианту осуществления осуществлена для того, чтобы разрешать такую проблему и подавлять потребление мощности в течение определенного периода времени. Определенный период времени может задаваться равным, например, но без конкретного ограничения, предварительно определенному периоду времени 13:00-16:00, к примеру, днем в летнее время года, в который потребление мощности является концентрированным.
[0027] По этой причине согласно этому варианту осуществления вышеуказанная проблема разрешается посредством выполнения управления во внепиковое время, в которое пороговое напряжение ненужности заряда аккумулятора LB автоматически управляемого транспортного средства 1 задается равным меньшему значению в течение периода времени, в котором потребление мощности является концентрированным (т.е. в пиковый период времени), по сравнению с нормальным периодом времени. Как результат, можно подавлять потребление мощности в течение пикового периода времени посредством достаточного использования способности к накоплению электричества аккумулятора LB при подавлении операции заряда аккумулятора LB из автоматического зарядного устройства 3.
[0028] Чтобы выполнять управление во внепиковое время, устройство 2 управления на стороне оборудования содержит избирательный переключатель 2A для выбора того, должно или нет выполняться управление во внепиковое время для подаваемой электрической мощности (активация управления во внепиковое время или деактивация управления во внепиковое время), и узел 2B задания, допускающий задание внепикового периода времени. Помимо этого, устройство 2 управления на стороне оборудования содержит узел 2C задания для задания порогового напряжения VA ненужности заряда автоматически управляемого транспортного средства 1 в течение нормального периода времени и порогового напряжения VA ненужности заряда автоматически управляемого транспортного средства 1 для управления во внепиковое время. Такие заданные значения служат в качестве критерия для определения того, должно или нет выполняться управление во внепиковое время, когда автоматически управляемое транспортное средство 1 приезжает в автоматическое зарядное устройство 3 зарядной станции CS.
[0029] Согласно этому варианту осуществления для управления во внепиковое время процедура управления зарядом аккумулятора по фиг. 5 выполняется, когда автоматически управляемое транспортное средство 1 приезжает в автоматическое зарядное устройство 3 зарядной станции CS. В дальнейшем в этом документе подробно описывается система управления зарядом аккумулятора автоматически управляемого транспортного средства 1 согласно этому варианту осуществления в отношении процедуры управления зарядом аккумулятора по фиг. 5.
[0030] Когда автоматически управляемое транспортное средство 1 движется по маршруту R движения и приезжает на зарядную станцию CS, оно останавливается в предварительно определенной позиции относительно автоматического зарядного устройства 3. Автоматическое зарядное устройство 3 начинает связь с узлом 14 связи автоматически управляемого транспортного средства 1 с использованием узла 24 связи (этап S1) и определяет то, устанавливается или нет связь с автоматически управляемым транспортным средством 1 (этап S2).
[0031] Когда устанавливается связь, определяется то, задается или нет настройка мощности устройства 2 управления на стороне оборудования равной настройке внепикового времени (активации управления во внепиковое время) (этап S3). Если настройка мощности задается равной настройке внепикового времени (активации управления во внепиковое время), определяется то, соответствует или нет текущее время пиковому периоду времени (этап S4). Если определено то, что настройка внепикового времени задается (активация управления во внепиковое время) и текущее время соответствует пиковому периоду времени, процесс переходит к этапу S5, так что пороговое напряжение VA ненужности заряда задается равным меньшему заданному напряжению (например, 23,0 В). Если определено то, что настройка внепикового времени не задается (деактивация управления во внепиковое время) или текущее время не соответствует пиковому периоду времени, процесс переходит к этапу S6, так что пороговое напряжение VA ненужности заряда задается равным нормальному заданному напряжению (например, 24,9 В).
[0032] Затем, напряжение аккумулятора автоматически управляемого транспортного средства 1 получается посредством обмена данными с узлом 14 связи автоматически управляемого транспортного средства 1 (этап S7), и определяется то, превышает или нет это напряжение аккумулятора заданное пороговое напряжение VA ненужности заряда (этап S8). Когда напряжение аккумулятора ниже заданного порогового напряжения VA ненужности заряда, операция заряда начинается (этап S9).
[0033] Для операции заряда аккумулятора LB автоматически управляемого транспортного средства питающий контактор 23 подключается к приемному контактору 13 автоматически управляемого транспортного средства 1 посредством выдвигания питающего контактора 23 из автоматического зарядного устройства 3 в автоматически управляемое транспортное средство 1. Когда контакторы 13 и 23 контактируют между собой, устанавливается состояние выполнения заряда. Автоматическое зарядное устройство 3 активирует источник 21 питания постоянного тока и подает мощность постоянного тока из источника 21 питания постоянного тока в аккумулятор LB автоматически управляемого транспортного средства 1 через питающий контактор 23 и приемный контактор 13, чтобы начинать операцию заряда. Помимо этого, автоматическое зарядное устройство 3 управляет значением зарядного тока, подаваемым в аккумулятор LB из источника 21 питания постоянного тока. Напряжение аккумулятора увеличивается относительно напряжения для начала заряда, когда выполняется операция заряда.
[0034] Монитор 11 заряда/разряда, смонтированный на транспортном средстве, отслеживает увеличение напряжения аккумулятора. Автоматическое зарядное устройство 3 получает напряжение аккумулятора автоматически управляемого транспортного средства 1 с использованием узлов 14 и 24 связи (этап S10) и определяет то, превышает или нет напряжение аккумулятора заданное пороговое напряжение VA ненужности заряда (этап S11).
[0035] Если напряжение аккумулятора превышает пороговое напряжение VA ненужности заряда, операция заряда завершается (этап S12). В частности, операция заряда прерывается посредством деактивации источника 21 питания постоянного тока, и соединение с приемным контактором 13 стороны автоматически управляемого транспортного средства 1 прекращается посредством втягивания питающего контактора 23.
[0036] Если напряжение аккумулятора автоматически управляемого транспортного средства 1 превышает пороговое напряжение VA ненужности заряда на этапе S8, или напряжение аккумулятора автоматически управляемого транспортного средства 1 превышает пороговое напряжение VA ненужности заряда посредством обработки этапов S9-S12, команда отъезда транспортного средства выводится в автоматически управляемое транспортное средство 1 с использованием узлов 14 и 24 связи (этап S13).
[0037] Затем, зарядная станция CS ожидает приезда следующего автоматически управляемого транспортного средства 1 (этап S14→S1). Когда приезжает следующее автоматически управляемое транспортное средство 1, повторяется управляющая последовательность (этапы S1-S13), описанная выше. Следует отметить, что автоматическое зарядное устройство 3 деактивируется, когда сборочная технологическая линия прекращает работу.
[0038] Процедура управления зарядом аккумулятора, проиллюстрированная на фиг. 6, показывает другой пример, в котором часть процессов (этапы S10 и S11) процедуры управления зарядом аккумулятора по фиг. 5 модифицируется на другие процессы (этапы S20 и S21).
[0039] Иными словами, в этом примере, когда начинается операция заряда на этапе S9, таймер заряда аккумулятора задается на этапе S20, и аккумулятор LB автоматически управляемого транспортного средства 1 заряжается в течение предварительно определенного времени. Затем, если определено то, что истекает предварительно определенное время, заданное посредством таймера заряда аккумулятора (этап S21), операция заряда завершается (этап S12).
[0040] Следовательно, в обработке согласно процедуре по фиг. 6, даже когда определяется, что напряжение аккумулятора ниже порогового напряжения ненужности заряда, и выполняется операция заряда, напряжение аккумулятора после предварительно определенного времени, заданного посредством таймера заряда аккумулятора, изменяется в зависимости от температурного режима или напряжения для начала заряда. Иными словами, напряжение аккумулятора после предварительно определенного времени, заданного посредством таймера заряда аккумулятора, может превышать пороговое напряжение ненужности заряда, или операция заряда может завершаться в то время, когда напряжение аккумулятора не достигает порогового напряжения ненужности заряда. Тем не менее, если напряжение аккумулятора заряжается только в течение времени, заданного посредством таймера заряда аккумулятора таким способом, можно фиксировать время парковки автоматически управляемого транспортного средства 1 в зарядной станции CS. Этот способ может быть предпочтительным в качестве способа заряда автоматически управляемого транспортного средства 1, движущегося по маршруту R движения по орбитальной дорожке.
[0041] Фиг. 7 показывает изменение напряжения аккумулятора автоматически управляемого транспортного средства 1 согласно этому варианту осуществления. Абсцисса обозначает время, истекшее от момента, когда сборочная технологическая линия начинает работу (например, 8:00). Период времени 11:00-12:00 задается для обеденного перерыва, а период времени 15:00-16:00 задается как время пересменки для рабочих, так что сборочная технологическая линия автоматически управляемых транспортных средств 1 останавливается. Помимо этого, период времени 13:00-17:00 задается как пиковый период времени.
[0042] Напряжение аккумулятора автоматически управляемого транспортного средства 1 увеличивается, когда выполняется операция заряда в зарядной станции CS (в ходе активации заряда). В ходе деактивации заряда напряжение аккумулятора снижается, когда автоматически управляемое транспортное средство 1 движется с использованием мощности, предоставляемой из аккумулятора LB. Снижение напряжения аккумулятора прекращается в обеденное время (11:00-12:00), когда останавливаются сборочная технологическая линия и автоматически управляемые транспортные средства 1.
[0043] Когда выполняется управление во внепиковое время, пороговое напряжение VA ненужности заряда понижается до 23,0 В. Как результат, автоматически управляемое транспортное средство 1 может непрерывно двигаться в момент, когда не выполняется операция заряда аккумулятора LB, даже когда автоматически управляемое транспортное средство 1 останавливается в зарядной станции CS. Помимо этого, можно уменьшать электрическую мощность, потребляемую для операции заряда, по сравнению с нормальным периодом времени. Также в этом случае операция заряда выполняется, когда напряжение аккумулятора снижается до значения меньше 23,0 В (порогового напряжения VA ненужности заряда), но уменьшается число операций заряда.
[0044] Когда управление во внепиковое время прекращается после 17:00, пороговое напряжение VA ненужности заряда изменяется на 24,9 В. Согласно этому заданию напряжения напряжение аккумулятора автоматически управляемого транспортного средства 1 увеличивается посредством заряда в зарядной станции CS (активация заряда). После этого, напряжение аккумулятора снижается, когда автоматически управляемое транспортное средство 1 движется с использованием источника питания аккумулятора LB.
[0045] Согласно этому варианту осуществления можно обеспечивать следующие преимущества.
[0046] (A) Этот вариант осуществления направлен на систему управления зарядом аккумулятора автоматически управляемого транспортного средства 1, которое движется без водителя посредством использования аккумулятора LB в качестве источника питания для приведения в движение и выполняет операцию заряда для аккумулятора LB с использованием автоматического зарядного устройства 3 аккумулятора, обеспеченного в зарядной станции CS. Система управления зарядом аккумулятора содержит узел 11 отслеживания заряда/разряда, который отслеживает величину заряда/разряда аккумулятора LB, и узел 2C задания порогового напряжения ненужности заряда, который задает пороговое напряжение ненужности заряда для аккумулятора LB. Кроме того, система управления зарядом аккумулятора содержит узел 20 управления зарядом, который выполняет операцию заряда для аккумулятора LB с использованием зарядного устройства аккумулятора 3, когда определяется, что напряжение аккумулятора LB автоматически управляемого транспортного средства 1, приезжающего на зарядную станцию CS, ниже порогового напряжения ненужности заряда, заданного посредством узла 2C задания порогового напряжения ненужности заряда. Узел 2C задания порогового напряжения ненужности заряда понижает пороговое напряжение ненужности заряда в течение конкретного заданного периода времени.
[0047] Иными словами, поскольку заданное пороговое напряжение ненужности заряда понижается в течение конкретного заданного периода времени, можно подавлять операцию заряда аккумулятора LB из зарядного устройства аккумулятора 3 посредством достаточного управления возможностью заряда аккумулятора для аккумулятора LB в течение конкретного периода времени, за счет этого подавляя потребление мощности.
[0048] (B) Узел 11 отслеживания заряда/разряда установлен на автоматически управляемом транспортном средстве 1. Узел 2C задания порогового напряжения ненужности заряда запрашивает величину заряда/разряда аккумулятора LB у узла 11 отслеживания заряда/разряда автоматически управляемого транспортного средства 1, приезжающего на зарядную станцию CS, с использованием узлов 14 и 24 связи, чтобы получать величину заряда/разряда аккумулятора LB. Чтобы реализовывать этот процесс, автоматически управляемое транспортное средство 1 требует только узла 11 отслеживания заряда/разряда для отслеживания величины заряда/разряда аккумулятора LB, смонтированного на автоматически управляемом транспортном средстве 1. Следовательно, можно снижать стоимость автоматически управляемого транспортного средства 1. Поскольку сборочная технологическая линия использует множественные автоматически управляемые транспортные средства 1, также можно понижать стоимость всей сборочной технологической линии.
[0049] (C) Узел 11 отслеживания заряда/разряда выполнен с возможностью отслеживать напряжения множественных гальванических элементов аккумулятора LB и останавливать автоматически управляемое транспортное средство 1 посредством отображения анормального состояния аккумулятора LB автоматически управляемого транспортного средства 1, когда любое из напряжений гальванических элементов ниже предварительно определенного значения напряжения. Поскольку предварительно определенное значение напряжения для определения анормального состояния аккумулятора LB понижается, когда автоматически управляемое транспортное средство 1 движется в области сборочной станции BS сборочной технологической линии, по сравнению со случаем, в котором транспортное средство движется в других областях сборочной технологической линии, можно подавлять анормальное прерывание автоматически управляемого транспортного средства 1 в то время, когда транспортное средство проходит через область сборочной станции BS.
[0050] Хотя изобретение описано выше в отношении конкретного варианта осуществления, изобретение не ограничено вариантом осуществления, описанным выше. Модификации и варьирования вариантов осуществления, описанных выше, должны быть очевидными для специалистов в данной области техники в пределах объема формулы изобретения.
[0051] Содержимое Японской патентной заявки № 2012-171716, с датой подачи 2 августа 2012 года в Японии, содержится в данном документе по ссылке.
Реферат
Использование: в области электротехники. Технический результат - обеспечение подачи мощности в зарядное устройство в конкретное предварительно определенное время. Система управления зарядом аккумулятора для автоматически управляемого транспортного средства содержит узел отслеживания заряда/разряда, который отслеживает величину заряда/разряда аккумулятора, узел задания порогового напряжения ненужности заряда, который задает пороговое напряжение ненужности заряда для аккумулятора, и узел управления зарядом, который выполняет операцию заряда для аккумулятора с использованием зарядного устройства аккумулятора, когда определяется, что напряжение аккумулятора автоматически управляемого транспортного средства, приезжающего на зарядную станцию, ниже порогового напряжения ненужности заряда. Узел задания порогового напряжения ненужности заряда выполнен с возможностью понижать пороговое напряжение ненужности заряда в течение конкретного заданного периода времени. 2 н. и 3 з.п. ф-лы, 7 ил.
Формула
узел (11) отслеживания заряда/разряда, который отслеживает величину заряда/разряда аккумулятора (LB);
узел (2C) задания порогового напряжения ненужности заряда, который задает пороговое напряжение ненужности заряда для аккумулятора (LB); и
узел (20) управления зарядом, который выполняет операцию заряда для аккумулятора (LB) с использованием зарядного устройства (3) аккумулятора, когда определяется, что напряжение аккумулятора (LB) автоматически управляемого транспортного средства (1), приезжающего на зарядную станцию (CS), ниже порогового напряжения ненужности заряда, заданного посредством узла (2C) задания порогового напряжения ненужности заряда,
при этом узел (2C) задания порогового напряжения ненужности заряда выполнен с возможностью понижать пороговое напряжение ненужности заряда в течение конкретного заданного периода времени,
узел отслеживания заряда/разряда выполнен с возможностью отслеживать напряжения множественных гальванических элементов аккумулятора (LB) и останавливать автоматически управляемое транспортное средство (1) посредством отображения анормального состояния аккумулятора (LB) автоматически управляемого транспортного средства (1), когда любое из напряжений гальванических элементов ниже предварительно определенного значения напряжения, и
предварительно определенное значение напряжения для определения анормального состояния аккумулятора (LB) понижается, когда автоматически управляемое транспортное средство (1) движется в предварительно определенной области, по сравнению со случаем, в котором транспортное средство (1) движется в других областях.
узел (2C) задания порогового напряжения ненужности заряда выполнен с возможностью запрашивать величину заряда/разряда аккумулятора у узла отслеживания заряда/разряда автоматически управляемого транспортного средства, приезжающего на зарядную станцию (CS), с использованием узла связи, чтобы получать величину заряда/разряда аккумулятора (LB).
отслеживают величину заряда/разряда аккумулятора (LB);
задают пороговое напряжение ненужности заряда для аккумулятора (LB);
заряжают аккумулятор (LB) с использованием зарядного устройства аккумулятора, когда определяется, что напряжение аккумулятора (LB) автоматически управляемого транспортного средства (1), приезжающего на зарядную станцию (CS), ниже порогового напряжения ненужности заряда; и
понижают пороговое напряжение ненужности заряда в течение конкретного заданного периода времени,
при этом отслеживание величины заряда/разряда аккумулятора содержит этап, на котором отслеживают напряжения множественных гальванических элементов аккумулятора (LB), и способ дополнительно содержит этап, на котором останавливают автоматически управляемое транспортное средство (1) посредством отображения анормального состояния аккумулятора (LB) автоматически управляемого транспортного средства, когда любое из напряжений гальванических элементов ниже предварительно определенного значения напряжения, и
при этом предварительно определенное значение напряжения для определения анормального состояния аккумулятора (LB) понижается, когда автоматически управляемое транспортное средство (1) движется в предварительно определенной области, по сравнению со случаем, в котором транспортное средство движется в других областях.
Комментарии