Бесконтактная система электропитания - RU2440635C1
Код документа: RU2440635C1
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к бесконтактной системе электропитания, использующей электромагнитную индукцию.
Уровень техники изобретения
Традиционно, электрические устройства (например, электробритва, электрическая зубная щетка и сотовый телефон), использующие аккумуляторные батареи в качестве источника электропитания, обеспечиваются различными бесконтактными системами электропитания, чтобы бесконтактно заряжать аккумуляторные батареи, используя электромагнитную индукцию.
В бесконтактной системе электропитания, когда первичная катушка источника электропитания не связана магнитно со вторичной катушкой электрического устройства (нагрузочного устройства) (дежурный режим), схема инвертора источника электропитания запускается периодически, чтобы, например, сдерживать потребление мощности. Когда первичная катушка связана магнитно со вторичной катушкой (режим подачи питания), схема инвертора запускается непрерывно, чтобы подавать электрическому устройству большое количество мощности. Дополнительно, когда вблизи первичной катушки источника электропитания находится металлическое инородное основание, инородное основание может нагреваться за счет индукционного нагрева. Соответственно, как в источнике электропитания, так и в электрическом устройстве обеспечиваются катушки для передачи сигналов. Схема инвертора источника электропитания переключается из режима периодической работы в режим непрерывной работы, только когда от электрического устройства источнику электропитания через катушки для передачи сигнала передается сигнал, предотвращая, таким образом, нагревание инородного основания (смотрите, например, японские публикации патентных заявок № H10-271713 и № H8-80042).
Однако в упомянутом выше традиционном случае схема инвертора источника электропитания запускается периодически даже в дежурном режиме, в котором мощность не передается к электрическому устройству. Соответственно, относительно большое количество мощности потребляется даже в дежурном режиме. Дополнительно, поскольку сигнал передается от электрического устройства через его катушку для передачи сигнала, в традиционном случае, раскрытом в японской публикации патентной заявки № H10-271713, в электрическом устройстве обеспечиваются колебательный контур для колебания катушки для передачи сигнала и вторая вторичная катушка, связанная магнитно с первичной катушкой источника электропитания и обеспечиваемая мощностью от запускаемой периодически схемы инвертора, чтобы подавать мощность на колебательный контур. Соответственно, существует проблема, состоящая в том, что в электрическом приборе требуется пространство и требуются затраты для обеспечения двух вторичных катушек.
Сущность изобретения
Учитывая изложенное выше, настоящее изобретение обеспечивает бесконтактную систему электропитания, способную сократить потребление мощности источника электропитания в дежурном режиме, в то же время сокращая количество катушек нагрузочного устройства, на которое подается мощность от источника электропитания, по сравнению с традиционным случаем.
В соответствии с вариантом осуществления настоящего изобретения обеспечивается бесконтактная система электропитания. Бесконтактная система электропитания включает в себя источник электропитания для передачи высокочастотной мощности и нагрузочное устройство, которое бесконтактно принимает высокочастотную мощность, передаваемую от источника электропитания посредством электромагнитной индукции для подачи высокочастотной мощности нагрузке, в которой источник электропитания включает в себя блок передачи мощности, имеющий первичную силовую катушку для передачи мощности и схему инвертора для подачи высокочастотного тока в первичную силовую катушку; блок опроса, имеющий первичную сигнальную катушку для приема сигнала от нагрузочного устройства и колебательного контура, причем первичная сигнальная катушка подключается между выходными выводами колебательного контура; блок обнаружения сигнала для обнаружения сигнала, принятого первичной сигнальной катушкой; и блок управления для управления блоком передачи мощности в соответствии с сигналом, обнаруженным блоком обнаружения сигнала, в которой нагрузочное устройство включает в себя нагрузку; блок приема мощности, имеющий вторичную силовую катушку для приема мощности, связанную магнитно с первичной силовой катушкой, и блок преобразования мощности, который преобразует высокочастотную мощность, индуцированную во вторичной силовой катушке, в мощность для нагрузки; вторичную сигнальную катушку, связанную магнитно с первичной сигнальной катушкой; и блок реакции, который управляется электродвижущей силой, индуцированной во вторичной сигнальной катушке, чтобы передавать сигнал от вторичной сигнальной катушки, и в которой блок управления источника электропитания не осуществляет передачу мощности от блока передачи мощности, когда блок обнаружения сигнала не обнаруживает сигнал, и осуществляет передачу мощности от блока передачи мощности, когда блок обнаружения сигнала обнаруживает сигнал.
В соответствии с вариантом осуществления настоящего изобретения блок управления источника электропитания останавливает передачу мощности блока передачи мощности, когда блок обнаружения сигнала не обнаруживает сигнал, и осуществляет передачу мощности блока передачи мощности, когда блок обнаружения сигнала обнаруживает сигнал. Соответственно, блок передачи мощности источника электропитания может быть полностью остановлен, когда мощность не подается от источника электропитания нагрузочному устройству, снижая, таким образом, потребление мощности источника электропитания в дежурном режиме. Дополнительно, блок реакции нагрузочного устройства управляется за счет индуцированной электродвижущей силы, сгенерированной во вторичной сигнальной катушке, связанной магнитно с первичной сигнальной катушкой, чтобы передавать сигнал от вторичной сигнальной катушки.
Поэтому нет необходимости обеспечивать еще одну катушку в дополнение к вторичной сигнальной катушке, чтобы подавать рабочую мощность блоку реакции от источника электропитания. В результате, по сравнению с традиционным случаем возможно снизить потребление мощности источника электропитания в дежурном режиме, в то же время сокращая количество катушек нагрузочного устройства, на которые мощность подается от источника электропитания.
Первичная силовая катушка и первичная сигнальная катушка могут быть, по существу, коаксиально установлены в источнике электропитания, и вторичная силовая катушка и вторичная сигнальная катушка могут быть, по существу, коаксиально установлены в нагрузочном устройстве.
Поэтому источник электропитания и нагрузочное устройство могут быть минимизированы. Дополнительно, когда проводящее инородное основание, отличное от вторичной сигнальной катушки, присутствует в пределах расстояния, на котором существует магнитный поток, созданный вокруг первичной сигнальной катушки, в инородном основании индуцируется электродвижущая сила, так что присутствие инородного основания может быть обнаружено. Однако первичная силовая катушка и первичная сигнальная катушка устанавливаются, по существу, коаксиально, и вторичная силовая катушка и вторичная сигнальная катушка устанавливаются, по существу, коаксиально, что дает возможность обнаружить, что между первичной силовой катушкой и вторичной силовой катушкой присутствует инородное основание. Соответственно, возможно предотвратить нагревание инородного основания.
Блок управления источника электропитания может запускать схему инвертора периодически, когда он осуществляет передачу мощности от блока передачи мощности, и останавливать передачу мощности от блока передачи мощности, если блок обнаружения сигнала не обнаруживает сигнал во время периода паузы схемы инвертора.
В результате, когда схема инвертора запускается, первичная сигнальная катушка располагается в магнитном потоке, создаваемом вокруг первичной силовой катушки. Соответственно, к сигналу, принимаемому первичной сигнальной катушкой, добавляется шумовой компонент. Поэтому блок управления источника электропитания запускает схему инвертора периодически, когда он выполняет передачу мощности от блока передачи мощности, и останавливает передачу мощности от блока передачи мощности, если блок обнаружения сигнала не обнаруживает сигнал во время периода паузы схемы инвертора. Следовательно, точность обнаружения блока обнаружения сигнала улучшается, так что сбой блока передачи мощности может быть предотвращен.
Сигнал может быть амплитудно-модулированным сигналом и блок обнаружения сигнала источника электропитания может детектировать огибающую напряжения, индуцированного в первичной сигнальной катушке, и определять, что сигнал обнаружен, если уровень обнаруженного напряжения превышает пороговое значение.
Следовательно, возможно получить те же самые эффекты, что и в случае, когда блок управления источника электропитания при выполнении передачи мощности от блока передачи мощности позволяет схеме инвертора запускаться периодически и останавливает передачу мощности блоком передачи мощности, если блок обнаружения сигнала не обнаруживает сигнал во время периода паузы схемы инвертора.
Нагрузочное устройство может содержать блок управления нагрузочного устройства для передачи управляющей команды от блока реакции к блоку управления источника электропитания, чтобы давать команды остановки передачи мощности от блока передачи мощности или снижение мощности передачи.
Традиционно, если нагрузкой является, например, аккумуляторная батарея и если от блока передачи мощности непрерывно подается мощность даже после того, как аккумуляторная батарея полностью заряжена, то мощность тратится впустую. В соответствии с вариантом осуществления настоящего изобретения, однако, блок управления нагрузочным устройством передает управляющую команду от блока реакции для инструктирования остановки передачи мощности от блока передачи мощности источника электропитания, тем самым сдерживая ненужную трату мощности.
Блок управления источника электропитания не может осуществлять передачу мощности от блока передачи мощности, если уровень сигнала, обнаруженный блоком обнаружения сигнала, является постоянным.
Поэтому, когда в пределах дальности, на которой существует магнитное поле, создаваемое вокруг первичной сигнальной катушки, присутствует проводящее инородное основание, отличное от нагрузочного устройства, в инородном основании индуцируется электродвижущая сила, так что уровень сигнала, обнаруживаемого в блоке обнаружения сигнала, уменьшается. Соответственно, блок управления источника электропитания не осуществляет передачу мощности блока передачи мощности, если уровень сигнала, обнаруженного блоком обнаружения сигнала, меньше заданного значения обнаружения.
Блок реакции нагрузочного устройства может иметь схему питания, которая создает рабочую мощность из напряжения, индуцированного во вторичной сигнальной катушке, и схему модуляции, которая управляется рабочей мощностью, создаваемой схемой электропитания, чтобы выдавать сигнал модуляции на вторичную сигнальную катушку.
Схема модуляции может создавать сигнал, модулированный посредством изменения импеданса элемента импеданса, подключенного между двумя концами вторичной сигнальной катушки.
Следовательно, схема модуляции может быть осуществлена таким образом, чтобы иметь простую конфигурацию.
Блок приема мощности нагрузочного устройства может дополнительно иметь схему электропитания для обеспечения рабочей мощности блока реакции из высокочастотной мощности, индуцированной во вторичной силовой катушке.
Как результат, вторая схема электропитания обеспечивает рабочую мощность блока реакции, используя высокочастотную мощность, принятую блоком приема мощности, тем самым обеспечивая преимущество повышения точности обнаружения блока обнаружения сигнала за счет увеличения мощности, передаваемой от блока реакции.
Блок обнаружения сигнала источника электропитания может дополнительно иметь одну или более дополнительных первичных сигнальных катушек.
В результате, возможно предотвратить нагревание инородного основания, меньшего, чем первичная силовая катушка.
Дополнительно, бесконтактная система электропитания может дополнительно содержать добавочные одно или более нагрузочных устройств, и нагрузочное устройство и добавочные нагрузочные устройства могут иметь разные типы нагрузки и блоков реакции нагрузочного устройства, и добавочные нагрузочные устройства могут передавать и принимать сигналы разных частот в соответствии с типами нагрузок, и блок опроса источника электропитания может позволить колебательному контуру генерировать колебания на частотах, изменяющихся в зависимости от типов нагрузочного устройства и добавочных нагрузочных устройств.
Как следствие, один источник электропитания может согласовываться со многими типами нагрузок.
Нагрузочное устройство может дополнительно содержать дополнительную схему электропитания для обеспечения рабочей мощности блока реакции из высокочастотной мощности, индуцированной во вторичной силовой катушке, и блок передачи сигнала нагрузочного устройства управляется мощностью, создаваемой дополнительной схемой электропитания, чтобы передавать сигнал передачи, и источник электропитания может содержать блок приема сигнала источника электропитания для приема сигнала передачи от блока передачи сигнала нагрузочного устройства.
Поэтому между блоком передачи сигнала нагрузочного устройства и блоком приема сигнала со стороны источника электропитания могут передаваться различные информационные данные.
Источник электропитания может дополнительно содержать схему модуляции, чтобы модулировать высокочастотную мощность от блока передачи мощности информационным сигналом, и нагрузочное устройство может дополнительно содержать схему демодуляции для демодуляции высокочастотной мощности, индуцированной во вторичной силовой катушке, чтобы восстановить информационный сигнал.
Соответственно, от источника электропитания на нагрузочное устройство могут передаваться различные информационные данные.
Колебательный контур может генерировать колебания периодически, когда блок обнаружения сигнала не обнаруживает сигнал, и колебательный контур может генерировать колебания непрерывно, если блок обнаружения сигнала обнаруживает сигнал.
Следовательно, возможно дополнительно снизить потребление мощности в дежурном режиме за счет периодической генерации колебаний колебательного контура блока опроса.
Дополнительно, внутренний и внешний диаметры первичной сигнальной катушки могут быть, по существу, идентичны диаметрам вторичной сигнальной катушки и внутренний диаметр вторичной сигнальной катушки может быть больше, чем внешний диаметр вторичной силовой катушки.
Следовательно, вторичная сигнальная катушка устанавливается снаружи вторичной силовой катушки 111, за счет чего возможно снизить влияние вторичной силовой катушки, когда сигнал передается от вторичной сигнальной катушки.
Первичная сигнальная катушка и вторичная сигнальная катушка могут устанавливаться между первичной силовой катушкой и вторичной силовой катушкой, когда первичная силовая катушка и вторичная силовая катушка связаны магнитно друг с другом.
В результате точность обнаружения блока обнаружения сигнала может быть улучшена за счет уменьшения расстояния между первичной сигнальной катушкой и вторичной сигнальной катушкой.
Колебательный контур блока опроса может создавать колебания на частоте, которая выше, чем частота схемы инвертора, и блок реакции может иметь схему электропитания, которая обеспечивает рабочую мощность из напряжения, индуцированного во вторичной сигнальной катушке, и схему модуляции, которая управляется рабочей мощностью, создаваемой схемой электропитания, чтобы выводить сигнал модуляции с частотой, более низкой, чем частота схемы инвертора, на вторичную сигнальную катушку.
Поэтому, когда блок обнаружения сигнала обнаруживает сигнал, легко отличить частоту колебаний колебательного контура и частоту схемы инвертора. Дополнительно, увеличивая частоту колебаний колебательного контура до относительно высокого уровня, возможно сдержать растрату мощности колебательного контура.
Нагрузочное устройство может содержать блок передачи сигнала реакции, который управляется за счет высокочастотной мощности, индуцированной во вторичной силовой катушке, чтобы передавать сигнал реакции через вторичную силовую катушку. Источник электропитания может содержать блок приема сигнала реакции для приема сигнала реакции через первичную силовую катушку, связанную магнитно со вторичной силовой катушкой, и когда блок управления источника электропитания выполняет передачу мощности от блока передачи мощности в соответствии с сигналом, обнаруженным блоком обнаружения сигнала, блок управления останавливает передачу мощности от блока передачи мощности, если период, в течение которого блок приема сигнала реакции не принимает сигнал реакции, превышает определенный период, и блок управления продолжает передачу мощности от блока передачи мощности, если период, в течение которого блок приема сигнала реакции не принимает сигнал реакции, не превышает определенный период.
Как следствие, пока схема инвертора запущена, первичный сигнал находится в магнитном поле, создаваемом вокруг первичной силовой катушки, так что шумовой компонент добавляется к сигналу, принимаемому в первичной сигнальной катушке. Соответственно, точность обнаружения блока обнаружения сигнала снижается, при смещении нагрузки, передача блока передачи мощности может быть остановлена, потеря мощности может возрасти или инородное основание может нагреваться.
Однако, когда блок обнаружения сигнала обнаруживает сигнал и блок управления начинает передачу мощности от блока передачи мощности, передача мощности блока передачи мощности продолжается, пока блок приема сигнала реакции принимает сигнал реакции, переданный от блока передачи сигнала реакции нагрузочного устройства, и останавливается, когда сигнал реакции не принят. Следовательно, даже при том что точность обнаружения блока обнаружения сигнала снижается, возможно предотвратить сбой блока передачи мощности. Дополнительно, схема инвертора блока передачи мощности может запускаться непрерывно таким образом, что эффективность источника электропитания повышается по сравнению со случаем, при котором схема инвертора запускается периодически, как описано выше.
Нагрузочное устройство может содержать блок управления нагрузочного устройства для передачи управляющей команды от блока реакции и блока передачи сигнала реакции блоку управления источника электропитания, чтобы инструктировать остановку передачи мощности от блока передачи мощности или снижение мощности передачи.
Традиционно, например, когда нагрузкой является аккумуляторная батарея, то если мощность непрерывно подается от блока передачи мощности даже после того, как аккумуляторная батарея полностью заряжена, мощность тратится впустую. В соответствии с вариантом осуществления настоящего изобретения, поэтому, блок управления нагрузочного устройства передает управляющую команду от блока реакции и блока передачи сигнала реакции, чтобы инструктировать остановку передачи мощности от блока передачи мощности источника электропитания, сдерживая, таким образом, ненужную трату мощности. Дополнительно, поскольку управляющая команда передается от блока передачи сигнала реакции, а также блока реакции, надежность передачи сигнала повышается и блок передачи мощности надежно управляется.
В соответствии с вариантом осуществления настоящего изобретения, по сравнению с традиционным случаем, возможно снизить потребление мощности источника электропитания в дежурном режиме, в то же время уменьшая число катушек нагрузочного устройства, на которое мощность подается от источника электропитания.
Краткое описание чертежей
Объекты и признаки настоящего изобретения станут очевидны из последующего описания вариантов осуществления, приведенных вместе с сопроводительными чертежами, на которых:
Фиг.1 - блок-схема источника электропитания и нагрузочного устройства в соответствии с первым вариантом осуществления настоящего изобретения;
Фиг.2 - принципиальная электрическая схема блока реакции в соответствии с первым вариантом осуществления настоящего изобретения;
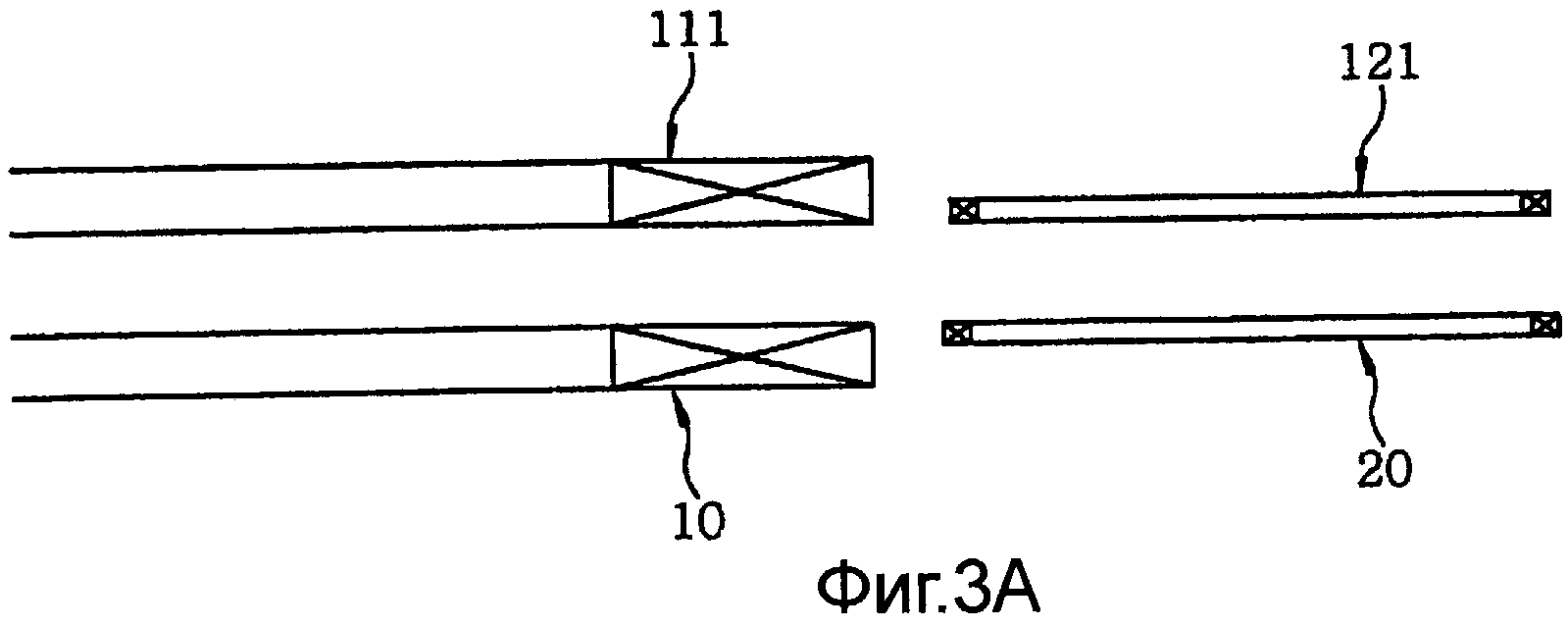
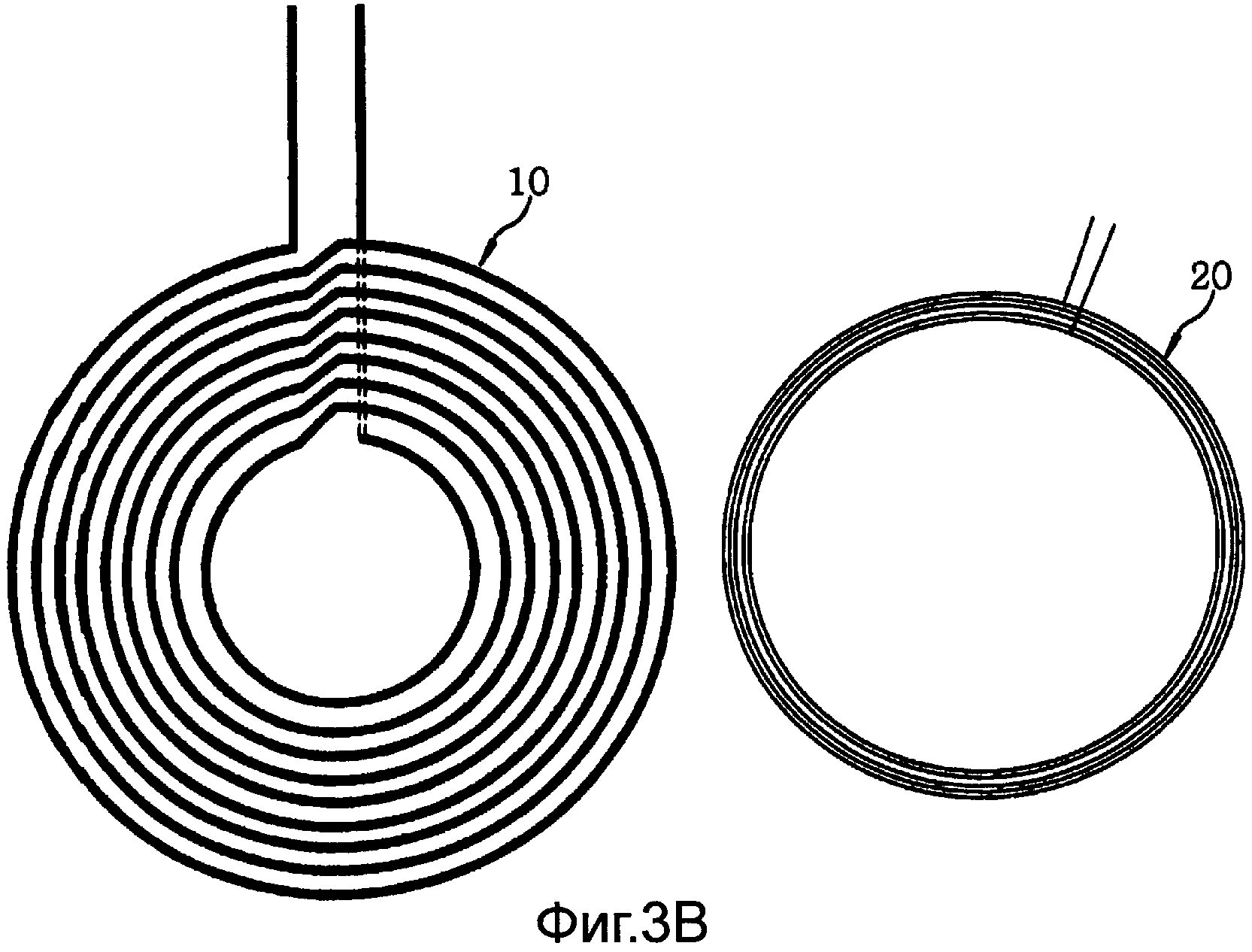
Фиг.3A - вид в поперечном сечении первичной силовой катушки, вторичной силовой катушки, первичной сигнальной катушки и вторичной сигнальной катушки в соответствии с первым вариантом осуществления настоящего изобретения;
Фиг.3B - вид сверху первичной силовой катушки и первичной сигнальной катушки;
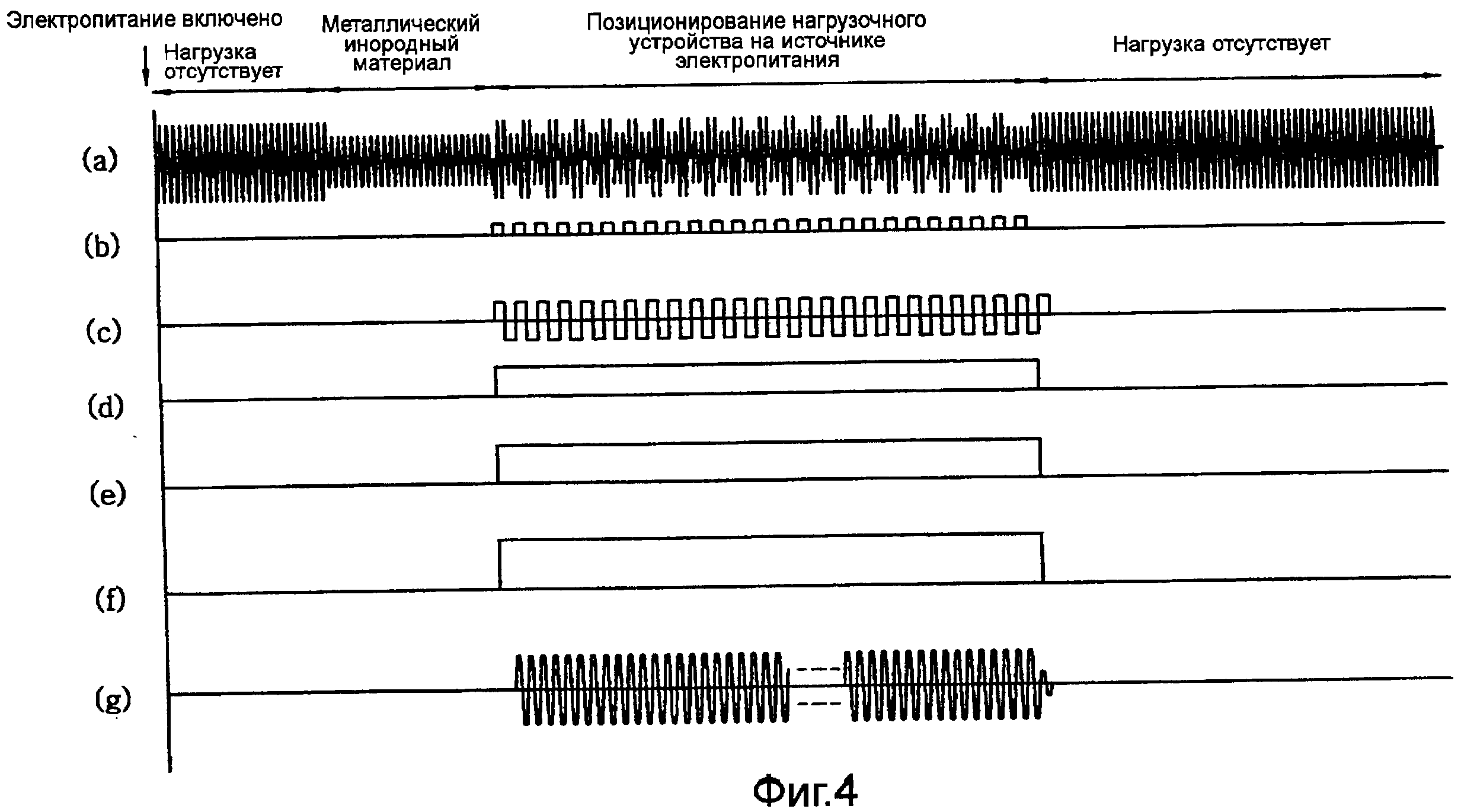
Фиг.4 - диаграмма формы сигналов для объяснения работы в соответствии с первым вариантом осуществления настоящего изобретения;
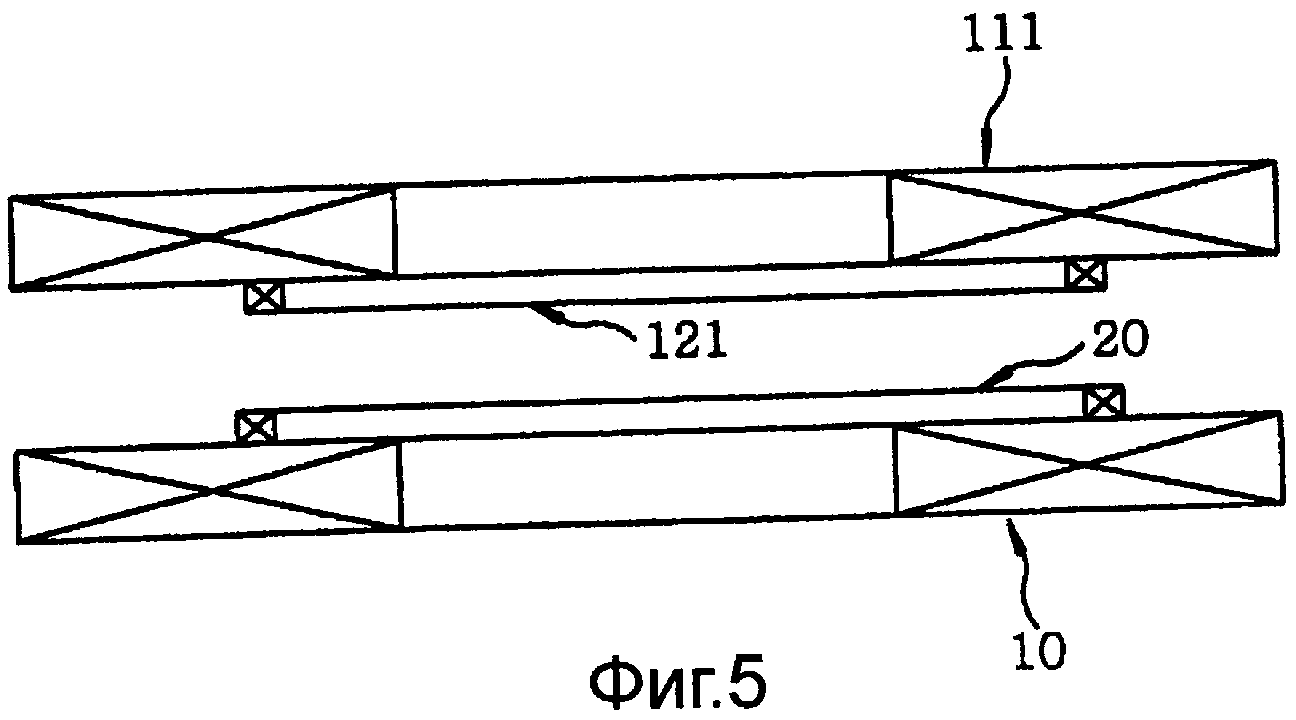
Фиг.5 - вид в поперечном сечении, показывающий другую конфигурацию первичной силовой катушки, вторичной силовой катушки, первичной сигнальной катушки и вторичной сигнальной катушки в соответствии с первым вариантом осуществления настоящего изобретения;
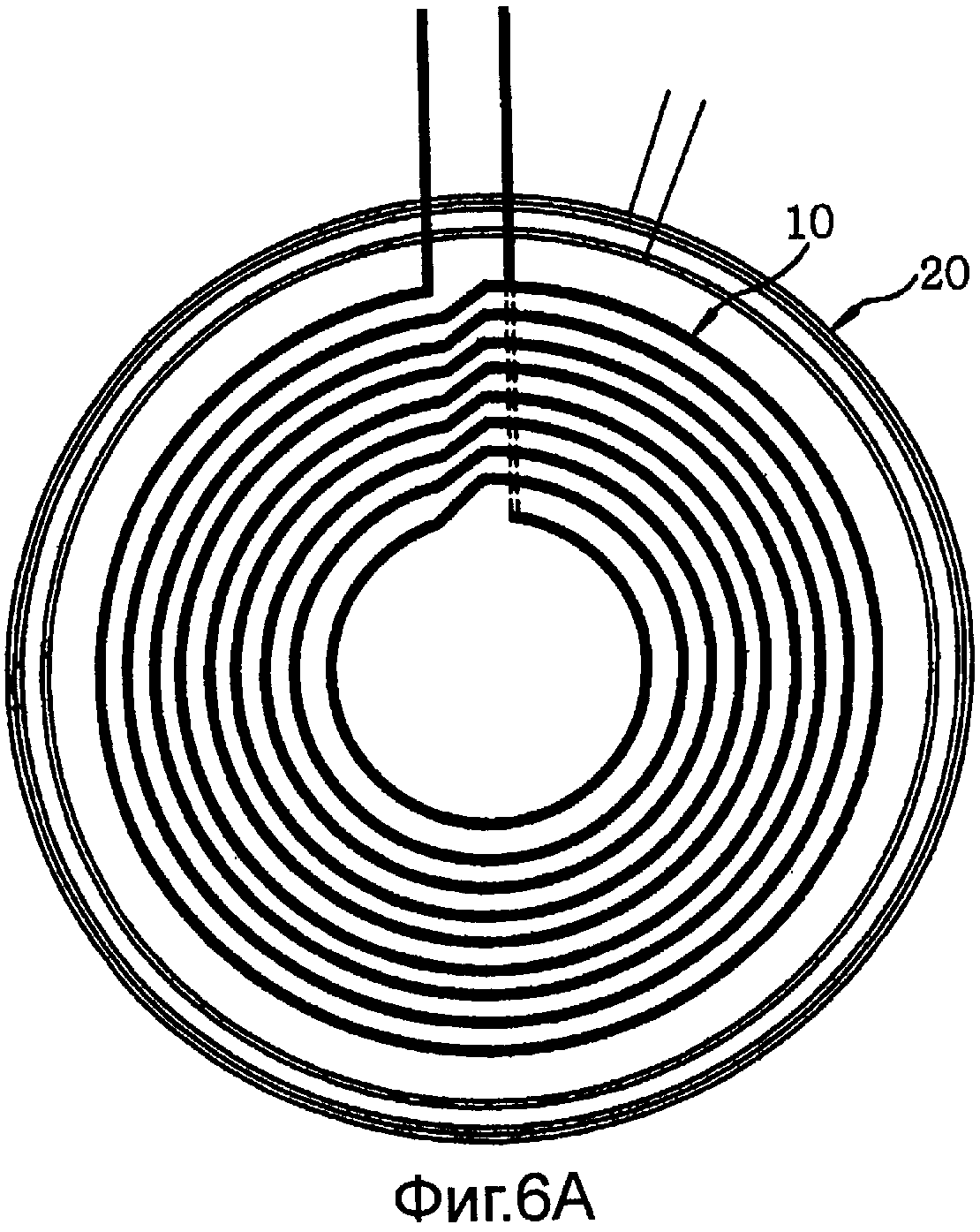
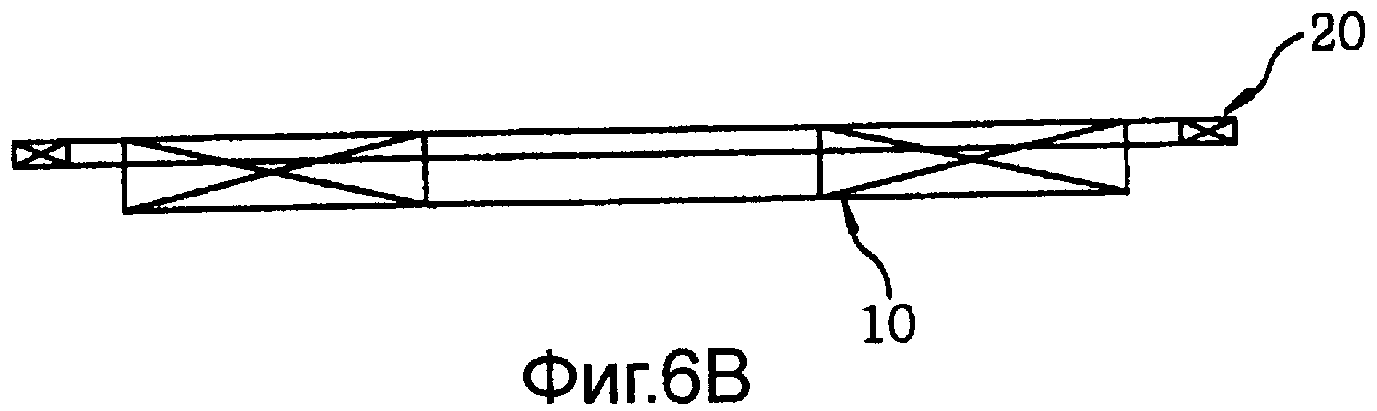
Фиг.6A - вид сверху, показывающий другую конфигурацию первичной силовой катушки и первичной сигнальной катушки;
Фиг.6B - вид в поперечном сечении, показывающий другую конфигурацию первичной силовой катушки и первичной сигнальной катушки в соответствии с первым вариантом осуществления настоящего изобретения;
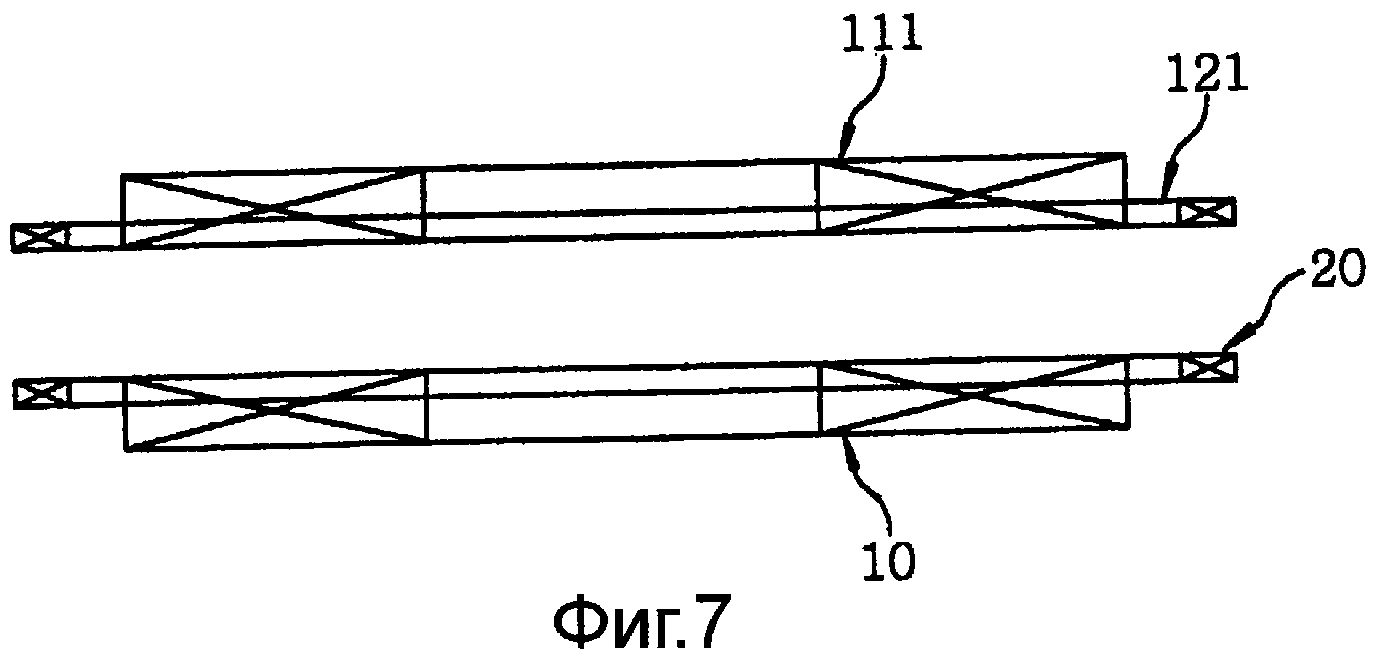
Фиг.7 - вид в поперечном сечении, показывающий еще одну другую конфигурацию первичной силовой катушки, вторичной силовой катушки, первичной сигнальной катушки и вторичной сигнальной катушки в соответствии с первым вариантом осуществления настоящего изобретения;
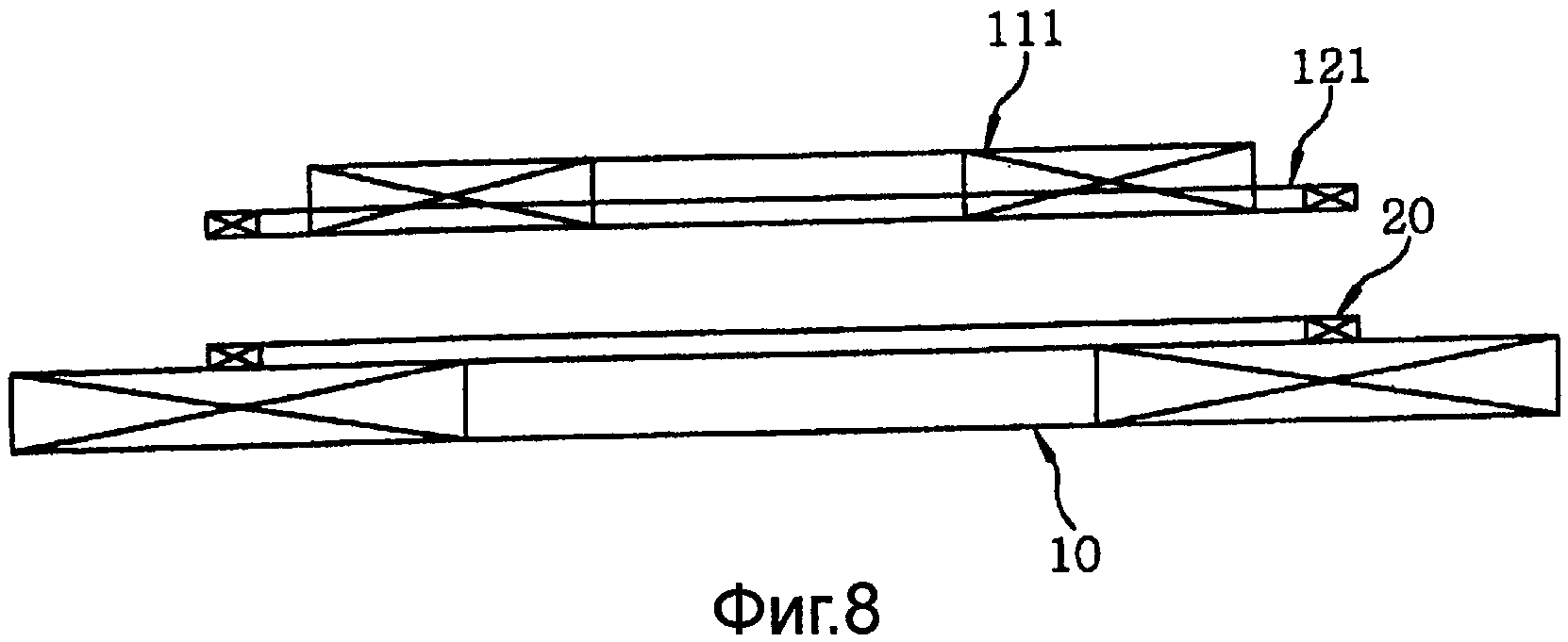
Фиг.8 - вид в поперечном сечении, показывающий еще одну другую конфигурацию первичной силовой катушки, вторичной силовой катушки, первичной сигнальной катушки и вторичной сигнальной катушки в соответствии с первым вариантом осуществления настоящего изобретения;
Фиг.9 - диаграмма формы сигналов для объяснения работы первого варианта осуществления настоящего изобретения;
Фиг.10 - блок-схема операции блока управления источника электропитания в соответствии с первым вариантом осуществления настоящего изобретения;
Фиг.11 - вид сверху, показывающий еще одну другую конфигурацию первичной силовой катушки и первичной сигнальной катушки в соответствии с первым вариантом осуществления настоящего изобретения;
Фиг.12 - блок-схема источника электропитания и нагрузочного устройства в соответствии со вторым вариантом осуществления настоящего изобретения;
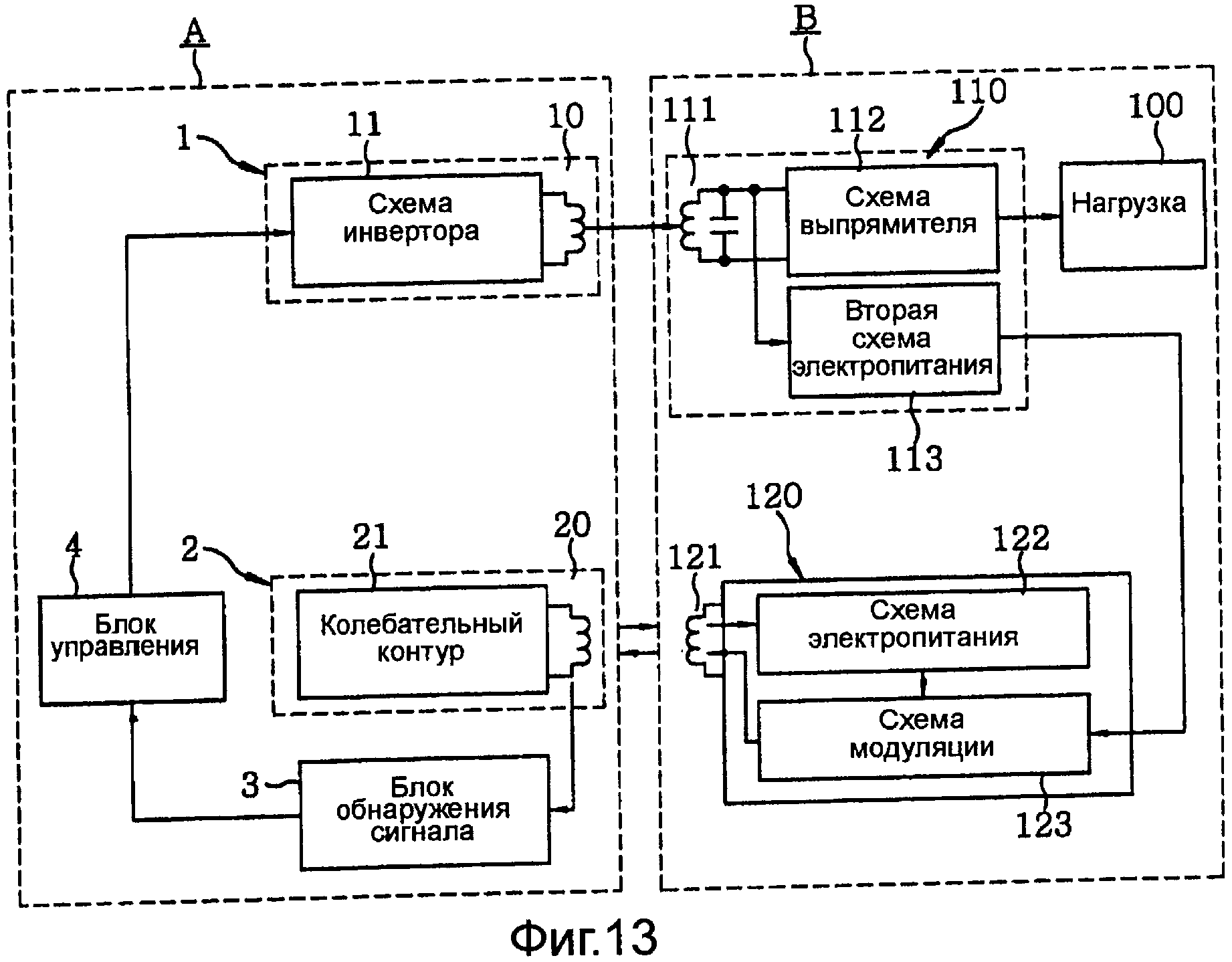
Фиг.13 - блок-схема источника электропитания и нагрузочного устройства в соответствии с третьим вариантом осуществления настоящего изобретения;
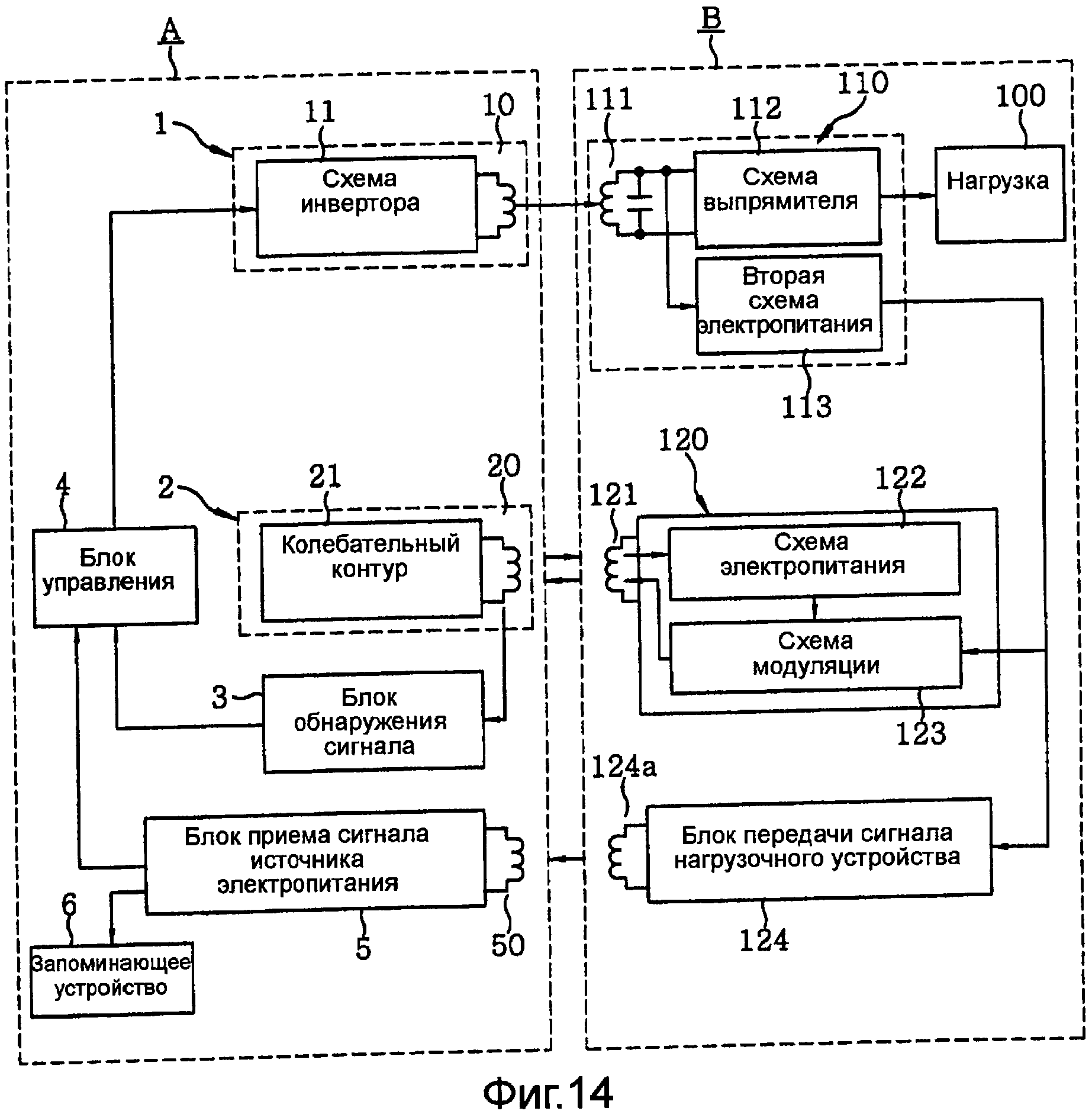
Фиг.14 - блок-схема источника электропитания и нагрузочного устройства в соответствии с четвертым вариантом осуществления настоящего изобретения;
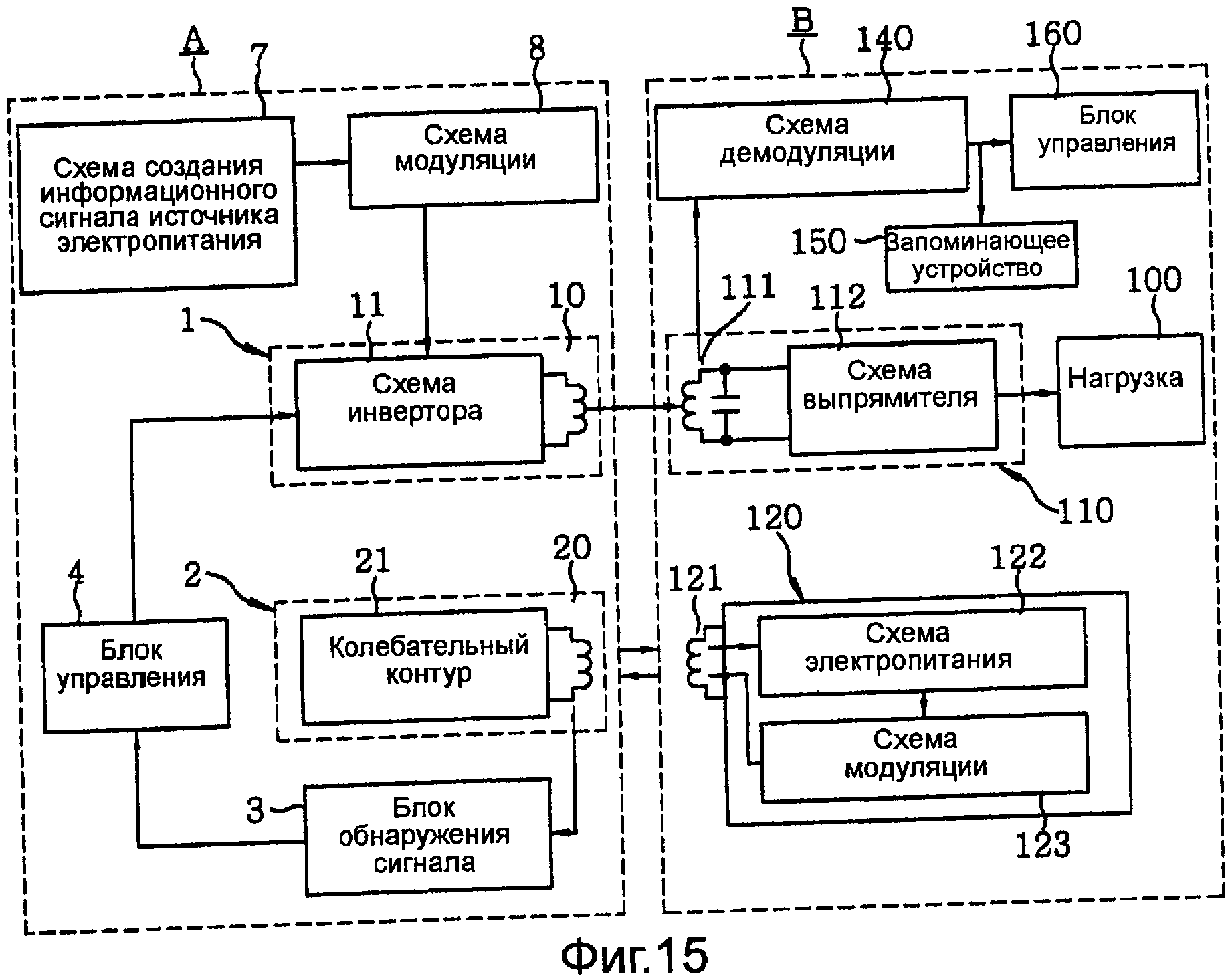
Фиг.15 - блок-схема источника электропитания и нагрузочного устройства в соответствии с пятым вариантом осуществления настоящего изобретения;
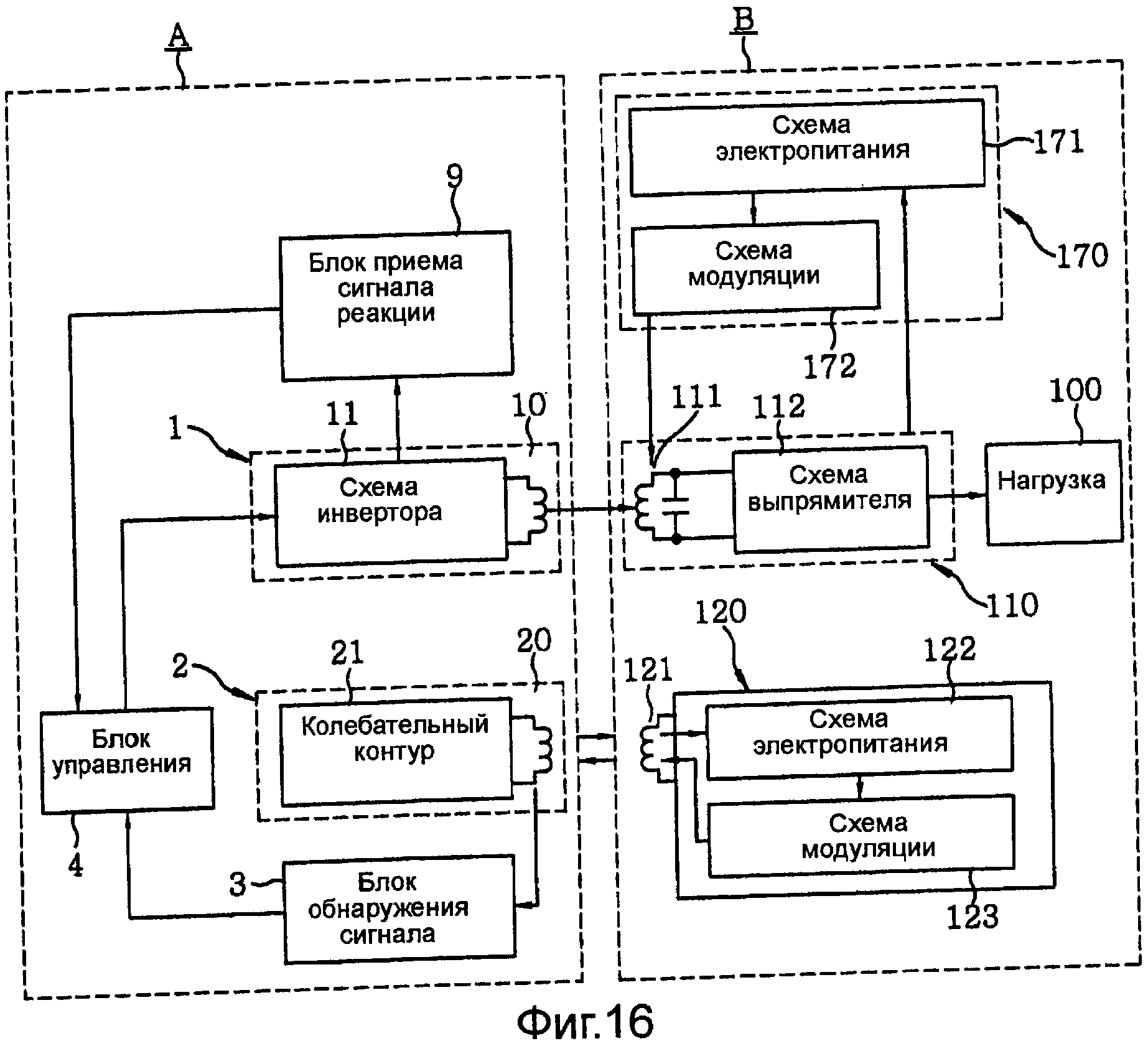
Фиг.16 - блок-схема источника электропитания и нагрузочного устройства в соответствии с шестым вариантом осуществления настоящего изобретения; и
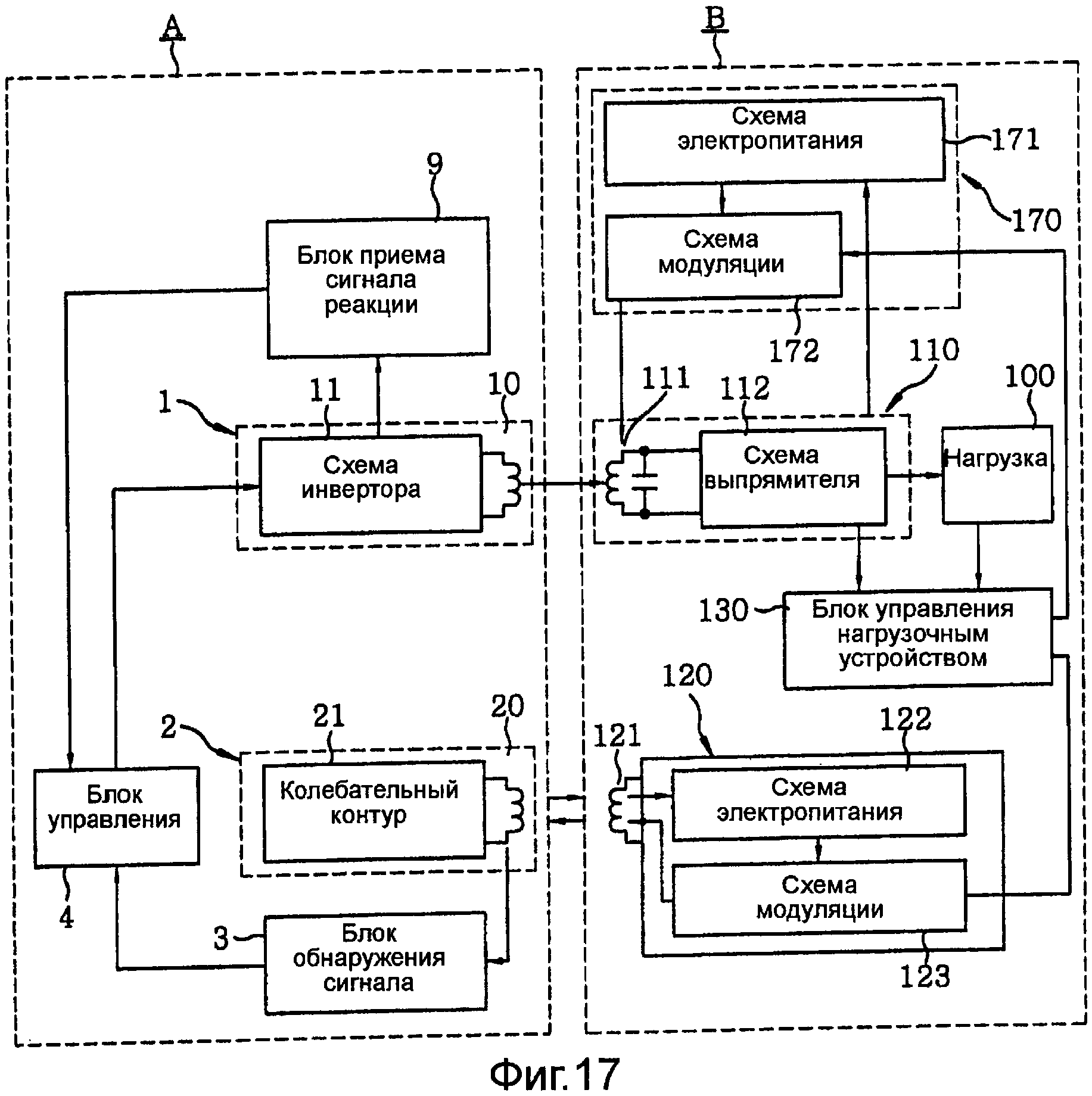
Фиг.17 - блок-схема источника электропитания и нагрузочного устройства в соответствии с седьмым вариантом осуществления настоящего изобретения.
Подробное описание вариантов осуществления
Здесь далее варианты осуществления настоящего изобретения будут описаны подробно со ссылкой на сопроводительные чертежи, которые являются их частью.
Первый вариант осуществления
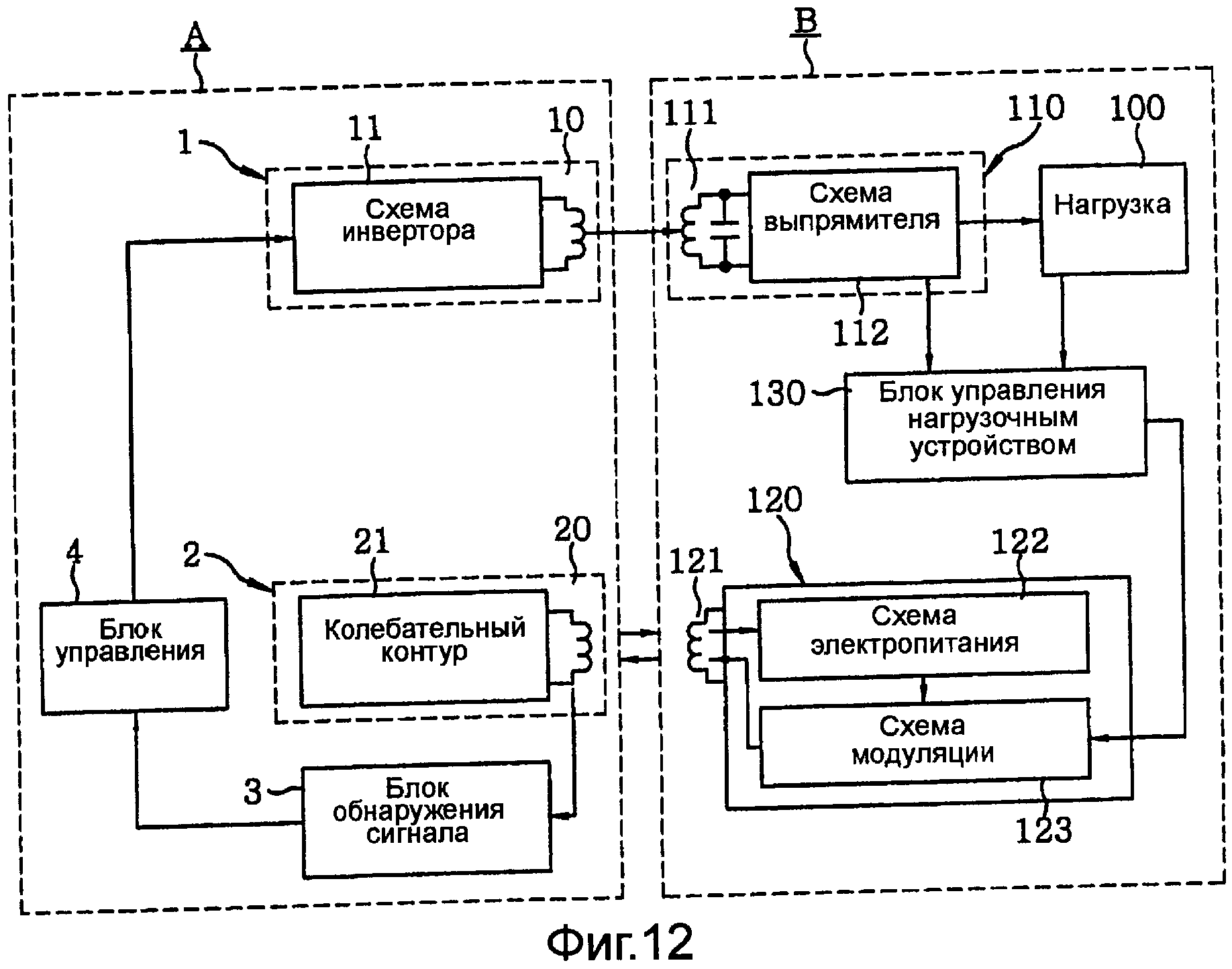
Бесконтактная система электропитания, соответствующая первому варианту осуществления настоящего изобретения, включает в себя, как показано на фиг.1, источник электропитания А, который передает высокочастотную мощность, и нагрузочное устройство В, которое принимает высокочастотную мощность, переданную от источника электропитания А в бесконтактном режиме с помощью электромагнитной индукции, чтобы подать мощность нагрузке.
Источник электропитания A включает в себя блок 1 передачи мощности, имеющий первичную силовую катушку 10 для передачи мощности и схему 11 инвертора для подачи высокочастотного тока в первичную силовую катушку 10, и блок 2 опроса, имеющий первичную сигнальную катушку 20 для передачи/приема сигнала в/от нагрузочного устройства В и колебательный контур 21, причем первичная сигнальная катушка 20 подключается между выходными выводами колебательного контура 21. Источник электропитания А дополнительно включает в себя блок 3 обнаружения сигнала для обнаружения сигнала, принятого первичной сигнальной катушкой 20, и блок 4 управления для управления блоком 1 передачи мощности в соответствии с сигналом, обнаруженным блоком 3 обнаружения сигнала.
Схема инвертора 11 преобразует переменный ток (АС) низкой частоты (50 Гц или 60 Гц), подаваемый коммерческим источником электропитания АС (не показан), в ток высокой частоты (приблизительно 100 кГц) (высокочастотный ток), чтобы подать высокочастотный ток в первичную силовую катушку 10. Поскольку схема 11 инвертора известна в данной области техники, ее подробная конфигурация, внешний вид и описание будут опущены.
Колебательный контур 21 генерирует колебательный сигнал на частоте (например, 4 МГц), достаточно более высокой, чем частота схемы 11 инвертора, чтобы подать колебательный сигнал (например, синусоидальный сигнал) на первичную сигнальную катушку 20. Так как колебательный контур 21 известен в данной области техники, его подробная конфигурация, внешний вид и описание будут опущены.
Блок 4 управления в качестве главного компонента включает в себя микрокомпьютер. Блок 4 управления выполняет различные процессы, включая управление работой схемы 11 инвертора, выполняя программы, хранящиеся в запоминающем устройстве (не показано) микрокомпьютера.
Нагрузочное устройство В включает в себя нагрузку 100 (например, аккумуляторная батарея) и блок 110 приема мощности, имеющий вторичную силовую катушку 111 для приема мощности, связанную магнитно с первичной силовой катушкой 10, и блок преобразования мощности (схема 112 выпрямителя в этом варианте осуществления), который преобразует высокочастотную мощность, индуцированную во вторичной силовой катушке 111, в мощность, пригодную для нагрузки 100. Нагрузочное устройство В дополнительно включает в себя вторичную сигнальную катушку 121, связанную магнитно с первичной сигнальной катушкой 20, и блок 120 реакции, который управляется за счет электродвижущей силы, индуцированной во вторичной сигнальной катушке 121, чтобы передавать сигнал от вторичной сигнальной катушки 121.
В блоке 110 приема мощности высокочастотная мощность, индуцированная во вторичной силовой катушке 111, выпрямляется схемой 112 выпрямителя, чтобы заряжать аккумуляторную батарею, служащую нагрузкой 100.
Блок 120 реакции имеет схему 122 электропитания, которая обеспечивает рабочую мощность (напряжение постоянного тока (DC)) из индуцированной электродвижущей силы, генерируемой во вторичной сигнальной катушке 121, и схему 123 модуляции, которая управляется рабочей мощностью, созданной схемой 122 электропитания, для вывода сигнала модуляции на вторичную сигнальную катушку 121. Дополнительно, в этом варианте осуществления, резонансный конденсатор C2 подключается между обоими концами вторичной сигнальной катушки 121, как показано на фиг.2, и вторичная сигнальная катушка 121 и конденсатор C2 образуют резонансный контур, чтобы увеличить высокочастотное напряжение, которое приложено к схеме 122 электропитания или схеме 123 модуляции.
В схеме 122 электропитания, как показано на фиг.2, высокочастотный ток, протекающий во вторичной сигнальной катушке 121, выпрямляется диодом D1, чтобы зарядить электролитический конденсатор С1. Электрический заряд электролитического конденсатора С1 разряжается, чтобы подавать напряжение ДС на схему 123 модуляции.
Схема 123 модуляции включает в себя, как показано на фиг.2, последовательную схему из выпрямительного диода D2, резистора R и переключающего элемента Q1, образованного биполярным транзистором, мультивибратор MV для генерации прямоугольных импульсных сигналов (модулированный сигнал) низкой частоты (приблизительно 1 кГц). Схема 123 модуляции модулирует амплитуду высокочастотного напряжения (сигнал несущей), индуцированного во вторичной сигнальной катушке 121, прямоугольным импульсным сигналом, выводимым мультивибратором MV, переключая переключающий элемент Q1 с помощью прямоугольного импульсного сигнала. В этом случае могут быть предусмотрены конденсатор или параллельная схема конденсаторов, чтобы увеличить или уменьшить импеданс (электростатическую емкость) вместо резистора R, подключенного ко вторичной сигнальной катушке 121 в соответствии с включением и выключением переключающего элемента Q1.
Между тем, когда сигнал несущей (высокочастотное напряжение, индуцированное во вторичной сигнальной катушке 121) амплитудно-модулирован схемой 123 модуляции, форма сигнала высокочастотного напряжения первичной сигнальной катушки 20, связанной магнитно с вторичной сигнальной катушкой 121, также изменяется. Соответственно, блок 3 обнаружения сигнала демодулирует (детектирует) модулированный сигнал (прямоугольный импульсный сигнал), детектируя огибающую сигнала высокочастотного напряжения первичной сигнальной катушки 20.
В источнике электропитания A и нагрузочном устройстве В, как показано на фиг.3A и 3B, каждый из набора первичных катушек 10 и 20 и набора вторичных катушек 111 и 121 расположен в плоскости, по существу, перпендикулярной их осевому направлению (вертикальное направление на фиг.3A).
Далее, работа варианта осуществления настоящего изобретения будет описана со ссылкой на диаграмму формы сигнала, показанную на фиг.4. На фиг.4 (a) показывает форму сигнала высокочастотного напряжения, генерируемого в первичной сигнальной катушке 20, (b) показывает модулированный сигнал (прямоугольный импульсный сигнал), выдаваемый схемой 123 модуляции, (c) показывает форму сигнала детектирования, получаемую, когда блок 3 обнаружения сигнала детектирует огибающую сигнала высокочастотного напряжения первичной сигнальной катушки 20, (d) приводит форму сигнала, полученного удержанием пиков детектированного сигнала, (e) показывает результат обнаружения сигнала, полученный блоком 3 обнаружения сигнала (двоичный сигнал, имеющий уровень Н, когда обнаружен сигнал от нагрузочного устройства В, и уровень L, когда не обнаружен сигнал от нагрузочного устройства B), (f) показывает управляющий сигнал блока 4 управления для управления блоком 1 передачи мощности (сигнал для запуска схемы 11 инвертора при уровне Н и остановки схемы 11 инвертора при уровне L) и (g) показывает форму сигнала высокочастотного тока, протекающего в первичной силовой катушке 10.
Когда электрическая мощность начинает подаваться источнику электропитания А от коммерческого источника мощности АС (не показан) (мощность включена, ON), блок 4 управления выдает управляющий сигнал уровня L, чтобы остановить схему 11 инвертора блока 1 передачи мощности, и колебательный контур 21 блока 2 опроса немедленно начинает генерировать колебания. В состоянии когда нагрузка отсутствует, в котором вторичная сигнальная катушка 121 нагрузочного устройства В отсутствует вблизи первичной сигнальной катушки 20, амплитуда сигнала высокочастотного напряжения, генерируемого в первичной сигнальной катушке 20, является постоянной. Когда амплитуда сигнала высокочастотного напряжения постоянна, блок 3 обнаружения сигнала не выполняет детектирование огибающей и выдает результат обнаружения "No signal" (нет сигнала) (сигнал уровня L) блоку 4 управления. Так как блок 3 обнаружения сигнала не обнаруживает сигнала, блок 4 управления определяет, что он находится в состоянии отсутствия нагрузки и постоянно выводит управляющий сигнал уровня L, так что схема 11 инвертора блока 1 передачи мощности поддерживается в остановленном состоянии.
Дополнительно, когда электрически проводящее инородное основание (например, металл) присутствует вблизи первичной сигнальной катушки 20, так чтобы располагаться в магнитном поле, генерируемом вокруг первичной сигнальной катушки 20, амплитуда сигнала высокочастотного напряжения уменьшается, но остается постоянной. Так как амплитуда сигнала высокочастотного напряжения не изменяется, блок 3 обнаружения сигнала не производит детектирование огибающей и выводит на блок 4 управления результат обнаружения "No signal" (нет сигнала). Так как блок 3 обнаружения сигнала не обнаруживает сигнал, блок 4 управления непрерывно выводит управляющий сигнал уровня L, так что схема 11 инвертора блока 1 передачи мощности поддерживается в остановленном состоянии.
Между тем, когда нагрузочное устройство В устанавливается в заданном положении относительно источника электропитания A, первичная силовая катушка 10 и первичная сигнальная катушка 20 располагаются так, чтобы быть связанными магнитно со вторичной силовой катушкой 111 и вторичной сигнальной катушкой 121 соответственно. Когда вторичная сигнальная катушка 121 связана магнитно с первичной сигнальной катушкой 20, во вторичной сигнальной катушке 121 генерируется индуцированная электродвижущая сила и схема 122 электропитания вырабатывает рабочую мощность. Схема 123 модуляции начинает управляться рабочей мощностью, созданной схемой 122 электропитания, чтобы выдать сигнал модуляции вторичной сигнальной катушке 121 (смотрите фиг.4(b)).
Следовательно, сигнал несущей является амплитудно-модулированным схемой 123 модуляции (смотрите фиг.4(a)), и сигнал высокочастотного напряжения первичной сигнальной катушки 20, связанной магнитно со вторичной сигнальной катушкой 121, также изменяется. Блок 3 обнаружения сигнала демодулирует (детектирует) модулированный сигнал (прямоугольный импульсный сигнал), детектируя огибающую сигнала высокочастотного напряжения первичной сигнальной катушки 20 (смотрите фиг.4(c)). Блок 3 обнаружения сигнала выполняет операцию удержания пиков демодулированного прямоугольного импульсного сигнала (смотрите фиг.4(d)).
Если пиковое значение превышает заданное пороговое значение, блок 3 обнаружения сигнала определяет, что нагрузочное устройство В присутствует и выводит на блок 4 управления результат обнаружения "Signal present" (сигнал присутствует) (сигнал уровня H). Когда блок 4 управления принимает от блока 3 обнаружения сигнала сигнал уровня Н, блок 4 управления преобразует управляющий сигнал уровня L в управляющий сигнал уровня Н, чтобы запустить схему 11 инвертора блока 1 передачи мощности (смотрите фиг.4(f)). Когда схема 11 инвертора запущена, высокочастотная мощность передается к блоку 110 приема мощности от блока 1 передачи мощности в бесконтактном режиме, чтобы заряжать аккумуляторную батарею, в качестве нагрузки 100.
Дополнительно, когда нагрузочное устройство В переносится из заданного положения А таким образом, что первичная силовая катушка 10 и первичная сигнальная катушка 20 не могут быть связаны магнитно с вторичной силовой катушкой 111 и вторичной сигнальной катушкой 121 соответственно, устанавливается упомянутое выше состояние отсутствия нагрузки. Затем блок 3 обнаружения сигнала выводит результат обнаружения "No signal" (нет сигнала) (сигнал уровня L) на блок 4 управления. Блок 4 управления преобразует управляющий сигнал уровня Н в управляющий сигнал уровня L, чтобы остановить схему 11 инвертора.
Как описано выше, в этом варианте осуществления блок 4 управления источника электропитания останавливает передачу мощности от блока 1 передачи мощности, когда блок 3 обнаружения сигнала не обнаруживает сигнал, и выполняет передачу мощности от блока 1 передачи мощности, когда блок 3 обнаружения сигнала обнаруживает сигнал. Соответственно, блок 1 передачи мощности (схема 11 инвертора) источника электропитания A может быть полностью остановлен, когда мощность не подается от источника электропитания А нагрузочному устройству В, тем самым, уменьшая потребление мощности источником электропитания А в дежурном режиме.
Дополнительно, блок 120 реакции нагрузочного устройства В управляется индуцированной электродвижущей силой, генерируемой во вторичной сигнальной катушке 121, связанной магнитно с первичной сигнальной катушкой 20, чтобы передавать сигнал от вторичной сигнальной катушки 121. Соответственно, нет необходимости обеспечивать другую катушку в дополнение ко вторичной сигнальной катушке 121, чтобы подавать рабочую мощность блоку 120 реакции от источника электропитания A. В результате, по сравнению с традиционным случаем возможно снизить потребление мощности источником электропитания А в дежурном режиме, снижая, в то же время, количество катушек нагрузочного устройства В, которому мощность подается от источника электропитания А.
Однако, когда первичная сигнальная катушка 20 и вторичная сигнальная катушка 121 соответственно располагаются на удалении от первичной силовой катушки 10 и вторичной силовой катушки 111 в плоскостях, перпендикулярных к осевому направлению, как показано на фиг.3A и 3B, инородное основание (например, кусок металла) может быть расположено между первичной силовой катушкой 10 и вторичной силовой катушкой 111 в состоянии, в котором нагрузочное устройство В расположено в заданном положении относительно источника электропитания A. В этом случае блок 4 управления может запускать схему 11 инвертора, чтобы нагревать инородное основание. Соответственно, предпочтительно обнаружить инородное основание (например, кусок металла), расположенное между первичной силовой катушкой 10 и вторичной силовой катушкой 111, и установить блок 4 управления таким образом, чтобы остановить схему 11 инвертора, чтобы предотвратить нагревание инородного основания в таком случае.
В этом отношении первичная силовая катушка 10 и первичная сигнальная катушка 20 могут предпочтительно быть размещены коаксиально в устройстве подачи мощности A и вторичная силовая катушка 111 и вторичная сигнальная катушка 121 могут также предпочтительно быть размещены коаксиально в нагрузочном устройстве В (смотрите фиг.5). В примере, показанном на фиг.5, первичная силовая катушка 10 и первичная сигнальная катушка 20 сформированы в форме окружности, имеющей, по существу, один и тот же размер, то есть один и тот же внутренний и внешний диаметры, так же как и вторичная силовая катушка 111 и вторичная сигнальная катушка 121 соответственно.
Дополнительно, как показано на фиг.5, соответствующие катушки размещаются в источнике электропитания A и нагрузочном устройстве В таким образом, что первичная сигнальная катушка 20 и вторичная сигнальная катушка 121 располагаются между первичной силовой катушкой 10 и вторичной силовой катушкой 111, в то время как первичная силовая катушка 10 и вторичная силовая катушка 111 располагаются, по существу, коаксиально, чтобы в магнитосвязанном состоянии быть обращенными друг к другу.
Такое расположение обеспечивает преимущество, заключающееся в повышенной точности обнаружения блока 3 обнаружения сигнала, снижая расстояние между первичной сигнальной катушкой 20 и вторичной сигнальной катушкой 121. Дополнительно, предпочтительно, чтобы на вторичную сигнальную катушку 121 как можно меньше влияла другая катушка (особенно, вторичная силовая катушка 111), чтобы позволить сигналу несущей иметь высокую степень модуляции.
Соответственно, вторичная сигнальная катушка 121 устанавливается снаружи вторичной силовой катушки 111, как показано на фиг.6A-8, снижая, таким образом, влияние вторичной силовой катушки 111, когда сигнал передается от вторичной сигнальной катушки 121 (когда сигнал несущей модулирован). То есть вторичные катушки 111 и 112 располагаются в одной и той же плоскости, и внутренний и внешний диаметры вторичной сигнальной катушки 121 больше, чем внешний диаметр вторичной силовой катушки 111. Дополнительно, хотя в этом варианте осуществления используется круговая дугообразная обмотка в плане, он не ограничивается этим и может использоваться катушка цилиндрической, прямоугольной или эллиптической формы.
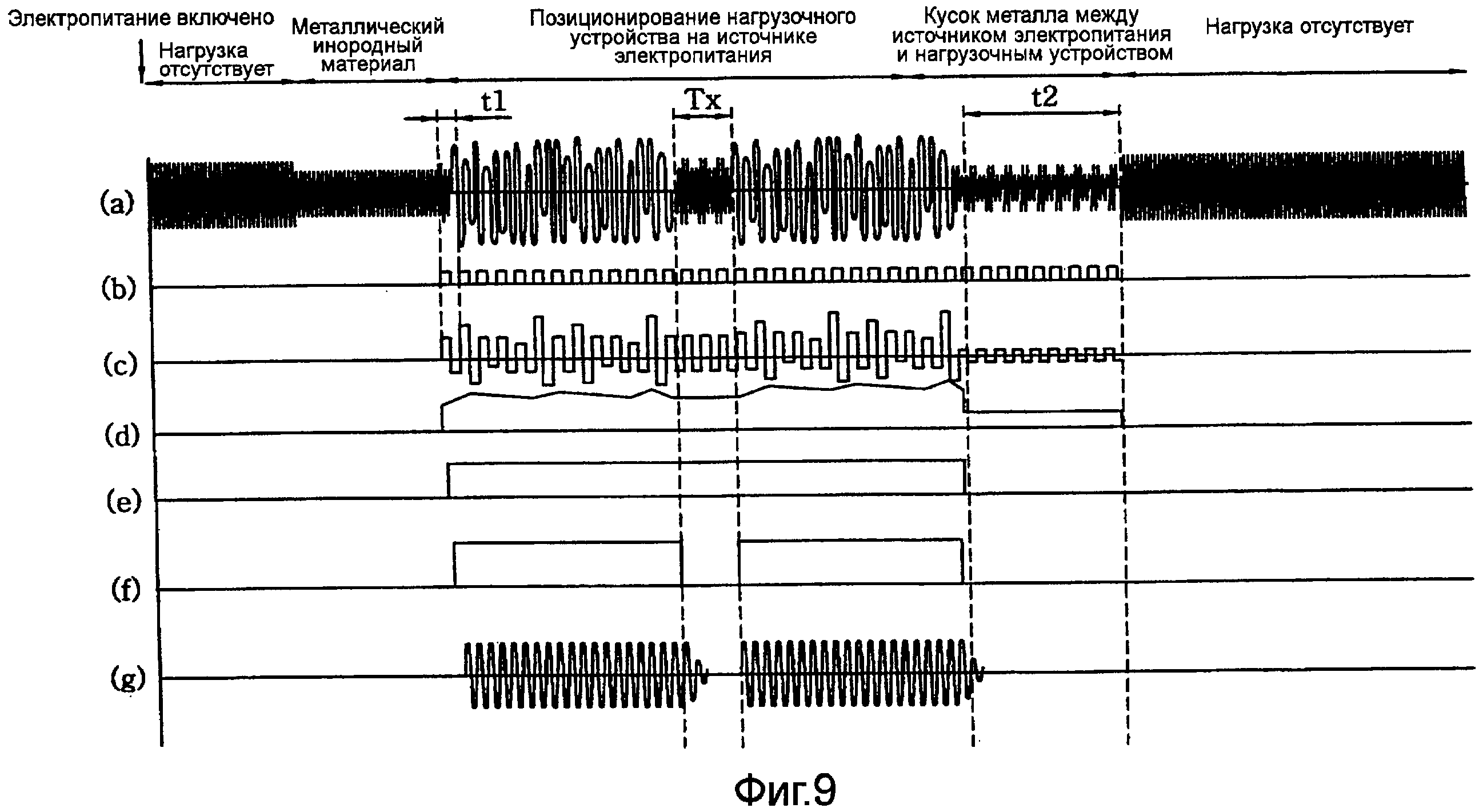
Затем другая операция этого варианта осуществления будет описана со ссылкой на изображение формы сигнала, показанное на фиг.9. На фиг.9 (a) показывает форму сигнала высокочастотного напряжения, генерируемого в первичной сигнальной катушке 20, (b) показывает модулированный сигнал (прямоугольный импульсный сигнал), выдаваемый схемой 123 модуляции, (c) показывает форму сигнала детектирования, получаемого, когда блок 3 обнаружения сигнала детектирует огибающую сигнала высокочастотного напряжения первичной сигнальной катушки 20, (d) представляет форму сигнала, получаемую посредством удержания пиков детектированного сигнала, (e) представляет результат обнаружения сигнала, полученный блоком 3 обнаружения сигнала (двоичный сигнал, имеющий уровень Н, когда обнаруживается сигнал от нагрузочного устройства В, и уровень L, когда сигнал не обнаруживается от нагрузочного устройства B), (f) показывает управляющий сигнал блока 4 управления для управления блоком 1 передачи мощности (сигнал для запуска схемы 11 инвертора при уровне Н и остановки схемы 11 инвертора при уровне L), и (g) показывает форму сигнала высокочастотного тока, протекающего в первичной силовой катушке 10.
В этом случае работа в состоянии отсутствия нагрузки и когда только металлическое инородное основание присутствует около первичной сигнальной катушки 20, является такой же, как в описанном выше случае и, таким образом, описание этого опущено.
Когда нагрузочное устройство В установлено в заданном положении относительно источника электропитания A, первичная силовая катушка 10 и первичная сигнальная катушка 20 располагаются так, чтобы быть связанными магнитно со вторичной силовой катушкой 111 и вторичной сигнальной катушкой 121 соответственно. Когда вторичная сигнальная катушка 121 связана магнитно с первичной сигнальной катушкой 20, во вторичной сигнальной катушке 121 создается индуцированная электродвижущая сила и схема 122 электропитания создает рабочую мощность. Схема 123 модуляции начинает обеспечиваться рабочей мощностью, созданной схемой 122 электропитания, чтобы выдавать сигнал модуляции вторичной сигнальной катушке 121 (смотрите фиг.9, (b)).
Следовательно, сигнал несущей модулируется по амплитуде схемой 123 модуляции (смотрите период времени t1 на фиг.9, (a)), и форма сигнала высокочастотного напряжения первичной сигнальной катушки 20, связанной магнитно с вторичной сигнальной катушкой 121, также изменяется. Блок 3 обнаружения сигнала демодулирует (детектирует) модулированный сигнал (прямоугольный импульсный сигнал), детектируя огибающую сигнала высокочастотного напряжения первичной сигнальной катушки 20 (смотрите фиг.9, (c)). Блок 3 обнаружения сигнала выполняет операцию удержания пиков демодулированного прямоугольного импульсного сигнала (смотрите фиг.9, (d)). Если пиковое значение превышает заданное пороговое значение, блок 3 обнаружения сигнала определяет, что нагрузочное устройство В присутствует и выводит на блок 4 управления результат обнаружения "Signal present" (сигнал присутствует) (сигнал уровня H) (смотрите фиг.9, (e)). Когда блок 4 управления принимает от блока 3 обнаружения сигнала сигнал уровня Н, блок 4 управления преобразует управляющий сигнал уровня L в управляющий сигнал уровня Н, чтобы запустить схему 11 инвертора блока 1 передачи мощности (смотрите фиг.9, (f)). Когда схема 11 инвертора запущена, высокочастотная мощность передается на блок 110 приема мощности от блока 1 передачи мощности в бесконтактном режиме, чтобы заряжать аккумуляторную батарею, служащую нагрузкой 100.
В этом случае, когда схема 11 инвертора запущена, магнитный поток, создаваемый вокруг первичной силовой катушки 10, воздействует на первичную сигнальную катушку 20, установленную, по существу, коаксиально с первичной силовой катушкой 10. Соответственно, как показано на фиг.9, (a), к сигналу высокочастотного напряжения, создаваемому в первичной сигнальной катушке 20, добавляется большой шумовой компонент. Таким образом, в блоке 3 обнаружения сигнала трудно обнаружить сигнал.
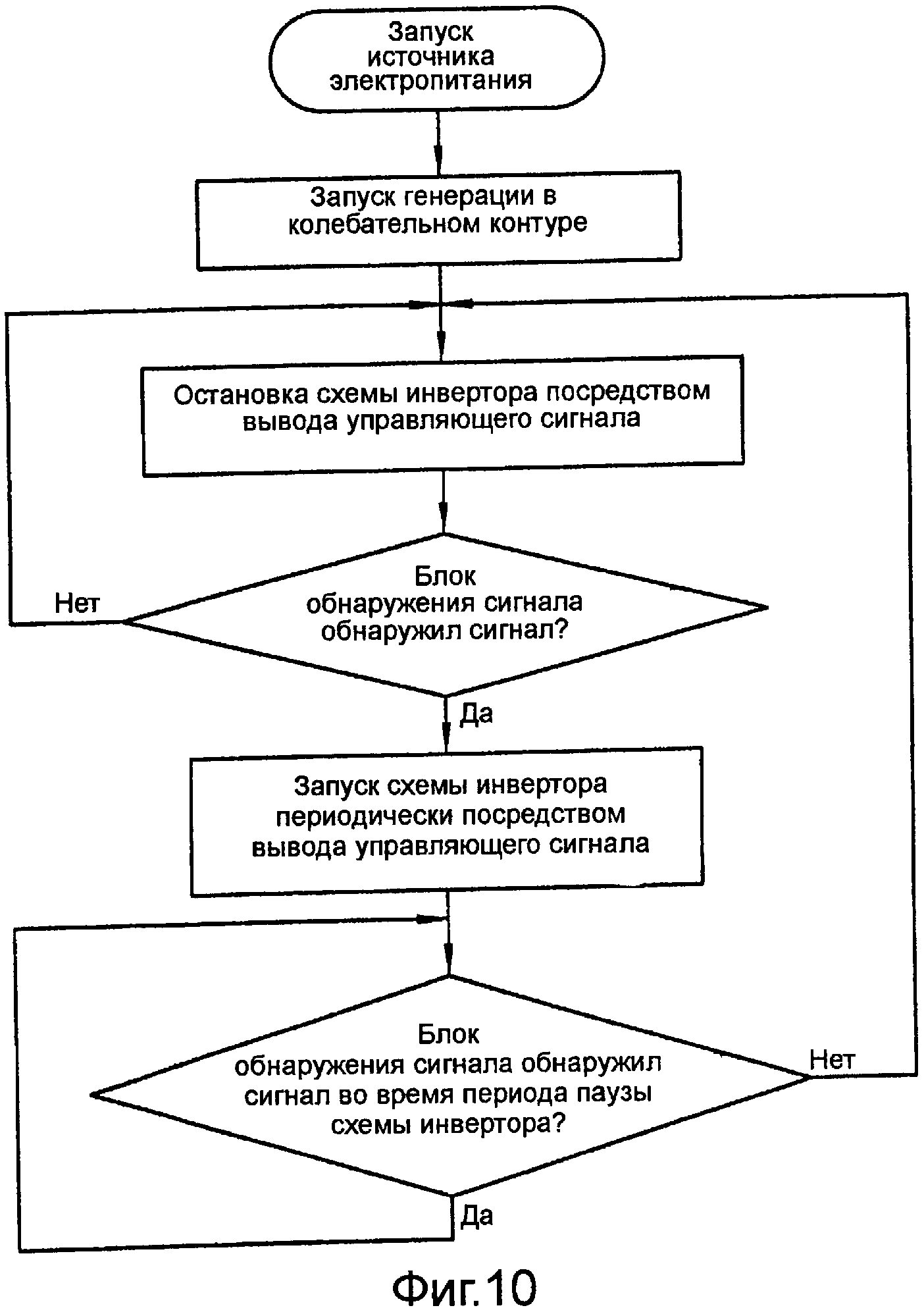
Соответственно, в этом варианте осуществления, блок 4 управления запускает схему 11 инвертора периодически. Как действительный расценивается только результат обнаружения блока 3 обнаружения сигнала, полученный во время периода паузы Tx схемы 11 инвертора. Если блок 3 обнаружения сигнала обнаруживает сигнал во время периода паузы Tx, схема 11 инвертора 11 запускается периодически, тогда как если блок 3 обнаружения сигнала не обнаруживает сигнал во время периода паузы Tx, схема 11 инвертора останавливается.
То есть, поскольку во время периода паузы Tx схемы 11 инвертора 11 вокруг первичной силовой катушки 10 не создается магнитный поток, большой шумовой компонент не добавляется к сигналу высокочастотного напряжения, создаваемому в первичной сигнальной катушке 20. Таким образом, блок 3 обнаружения сигнала может точно обнаруживать сигнал. Поэтому, когда блок 4 управления управляет блоком 1 передачи мощности, основываясь на результате обнаружения блока 3 обнаружения сигнала, полученном во время периода паузы Tx, сбой во время передачи мощности блока 1 передачи мощности может быть предотвращен.
В то же время, когда инородное основание (например, кусок металла) располагается между первичными катушками 10 и 20 и вторичными катушками 111 и 121, высокочастотное напряжение, индуцированное во вторичной сигнальной катушке 121, уменьшается под влиянием металлического инородного основания. В результате, по причине того что схема 122 электропитания не создает рабочую мощность, достаточную для работы схемы 123 модуляции или тому подобного, уровень напряжения сигнала высокочастотного напряжения, создаваемый в первичной сигнальной катушке 20, уменьшается (смотрите период времени t2 на фиг.9, (a)).
Соответственно, блок 3 обнаружения сигнала выводит результат обнаружения "No signal" (сигнал уровня L) на устройство 4 управления, потому что пиковое значение демодулированного прямоугольного импульсного сигнала не превышает пороговое значение. Следовательно, блок 4 управления преобразует управляющий сигнал уровня Н в управляющий сигнал уровня L, чтобы остановить схему 11 инвертора, тем самым препятствуя нагреванию металлического инородного основания за счет передачи мощности блоком 1 передачи мощности. На фиг.10 показана блок-схема процесса, осуществляемого блоком 4 управления источника электропитания А в описанной выше работе.
В этом варианте осуществления частота (приблизительно 1 кГц) модулированного сигнала схемы 123 модуляции относительно низкая по сравнению с частотой колебаний (приблизительно 4 МГц) колебательного контура 21 и частоты схемы 11 инвертора (приблизительно 100 кГц). Соответственно, когда блок 3 обнаружения сигнала обнаруживает огибающую модулированного сигнала, фильтрация может быть легко выполнена. Дополнительно, как первичная сигнальная катушка 20, так и вторичная сигнальная катушка 121 имеют малый диаметр и малое количество витков и работают при низком потреблении мощности путем увеличения частоты колебаний колебательного контура 21 до относительно наивысшего уровня, чтобы увеличить импеданс АС катушек 20 и 121 и снизить ток, протекающий в катушках 20 и 121.
Дополнительно, в источнике электропитания A, колебательный контур 21 блока 2 опроса непрерывно генерирует колебания. Альтернативно, колебательный контур 21 может генерировать колебания периодически, пока блок 3 обнаружения сигнала не обнаруживает сигнал, и может генерировать колебания непрерывно пока блок 3 обнаружения сигнала обнаруживает сигнал. В этом случае возможно дополнительно снизить потребление мощности в дежурном режиме по сравнению со случаем, в котором колебательный контур 21 генерирует колебания непрерывно. Дополнительно, даже в случае когда блок 3 обнаружения сигнала обнаруживает сигнал, колебательный контур 21 может генерировать колебания только во время периода паузы Tx, запускаясь периодически схемой 11 инвертора, и генерация колебательного контура 21 может быть остановлена во время периода, в котором запускается схема 11 инвертора.
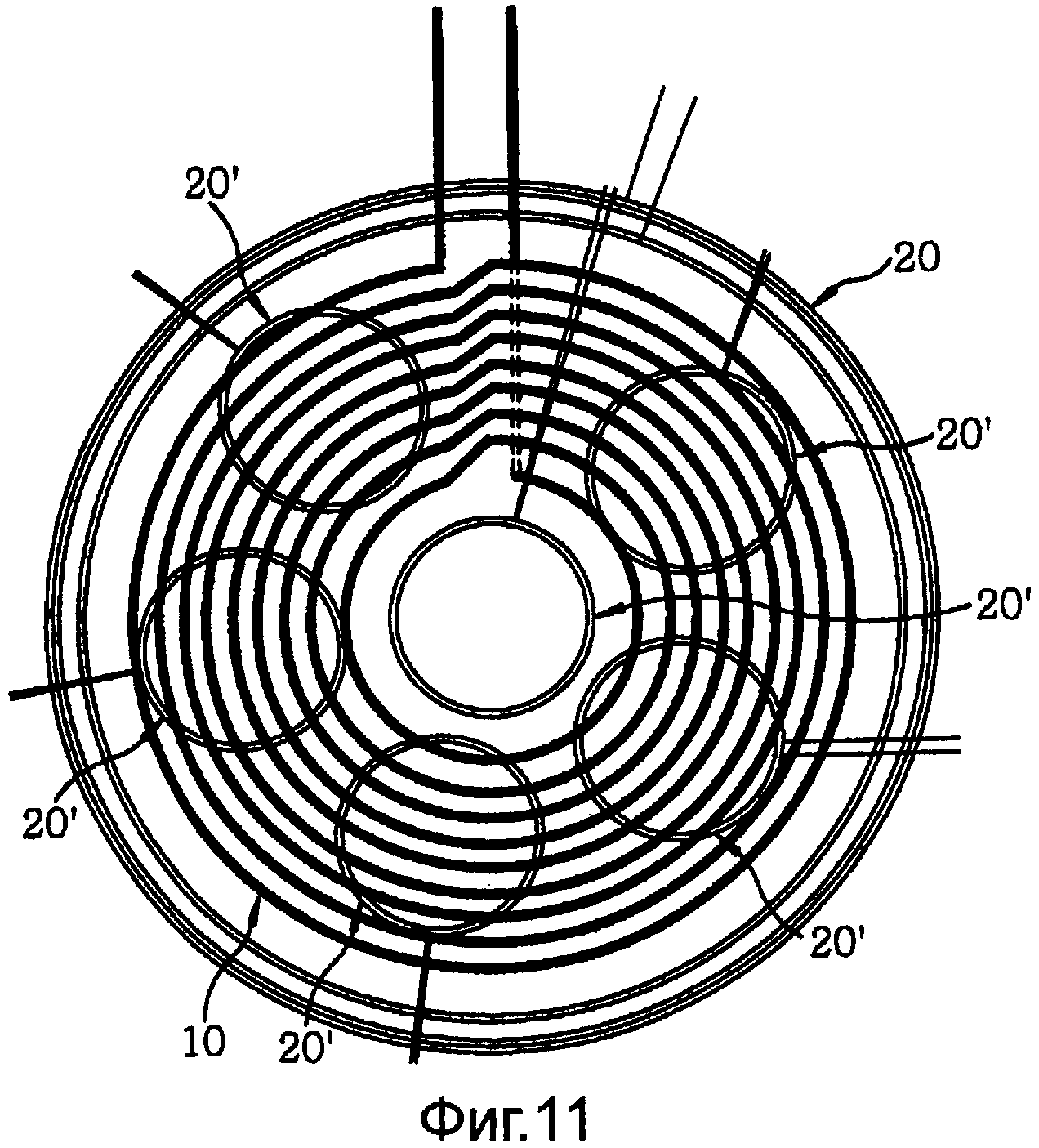
Дополнительно, как показано на фиг.11, в дополнение к первичной сигнальной катушке 20, большей, чем первичная силовая катушка 10, в блоке 2 опроса источника электропитания A может быть обеспечено множество (шесть в показанном примере) первичных сигнальных катушек 20'. В такой конфигурации, даже когда присутствует инородное основание, меньшее, чем первичная силовая катушка 10, присутствие инородного основания может быть обнаружено на основе сигнала высокочастотного напряжения, создаваемого в одной из первичных сигнальных катушек 20', и схема 11 инвертора останавливается, чтобы препятствовать нагреванию инородного основания.
Однако, когда один источник электропитания А снабжает мощностью многочисленные нагрузочные устройства В, имеющие различные типы нагрузок 100, мощностью, передаваемой от блока 1 передачи мощности, требуется управлять в соответствии с типом нагрузки 100. Соответственно, блок 4 управления может запускать колебательный контур 21 блока 2 опроса, чтобы генерировать колебания на заданных многочисленных частотах способом разделения во времени в дежурном режиме и определяет тип нагрузочного устройства В, основываясь на результатах обнаружения сигнала блока 3 обнаружения сигнала на соответствующих частотах колебаний.
Более конкретно, нагрузочное устройство В может быть идентифицировано с помощью предопределенных многократных частот, установленных в колебательном контуре 21, и резонансной частоты, определенной вторичной катушкой 121, и резонансного конденсатора C2 каждого из нагрузочных устройств В (см. Фиг.2). Индуцированная электродвижущая сила почти не генерируется во вторичной сигнальной катушке 121 на нерезонансной частоте, так что схема модуляции не может работать, чтобы выдавать сигнал модуляции вторичной сигнальной катушке 121. С другой стороны, индуцированная электродвижущая сила генерируется во вторичной сигнальной катушке 121 на резонансной частоте, и модуляция выполняется. Поэтому источник электропитания А может идентифицировать нагрузочное устройство В, связанное с ним для приема мощности.
Затем устройство 4 управления управляет мощностью, передаваемой от блока 1 передачи мощности, увеличивая или уменьшая частоту схемы 11 инвертора в соответствии с типом нагрузочного устройства B.
Второй вариант осуществления
Как показано на фиг.12, в соответствии со вторым вариантом осуществления настоящего изобретения бесконтактная система электропитания обладает признаком, что нагрузочное устройство В дополнительно включает в себя блок 130 управления нагрузочного устройства, чтобы передавать управляющую команду от блока 120 реакции на блок 4 управления источника электропитания А для инструктирования остановки передачи мощности блока 1 передачи мощности или снижения уровня передаваемой мощности передачи. Так как другие конфигурации являются теми же самыми, что и в первом варианте осуществления, то компонентам, которые используются в первом варианте осуществления, будут назначаться те же ссылочные номера и их объяснение будет опущено.
Например, если нагрузка 100 является аккумуляторной батареей и от источника электропитания А непрерывно подается мощность даже после того, как аккумуляторная батарея полностью заряжена, то мощность тратится впустую. В таком случае может быть рассмотрено обеспечение переключающего элемента (элемент полупроводникового переключателя или реле) на пути подачи мощности между блоком 110 приема мощности и нагрузкой 100 так, чтобы, когда аккумуляторная батарея полностью заряжена, переключающий элемент выключен, чтобы прерывать подачу мощности от блока 110 приема мощности нагрузке 100. Поскольку, однако, мощность подается от блока 1 передачи мощности непрерывно, напряжение на выводах вторичной силовой катушки 111 повышается. Соответственно, требуется иметь резерв выдерживаемого напряжения блока преобразования мощности (схема 112 выпрямителя), вызывая, тем самым, увеличение стоимости и размера.
Однако в этом варианте осуществления, когда аккумуляторная батарея, служащая нагрузкой 100, полностью заряжена, блок 130 управления нагрузочного устройства останавливает схему 123 модуляции блока 120 реакции, так что блок 3 обнаружения сигнала источника электропитания A не обнаруживает сигнал. В результате, поскольку блок 3 обнаружения сигнала не обнаруживает сигнал, блок 4 управления источника электропитания А останавливает схему 11 инвертора, тем самым останавливая подачу мощности блоком 1 передачи мощности.
Третий вариант осуществления
Как показано на фиг.13, в соответствии с третьим вариантом осуществления настоящего изобретения бесконтактная система электропитания обладает тем признаком, что вторая схема 113 электропитания для создания рабочей мощности блока 120 реакции из высокочастотной мощности, индуцированной во вторичной силовой катушке 111, обеспечивается в блоке 110 приема мощности нагрузочного устройства В. Дополнительно, поскольку другие конфигурации являются такими же, как в первом варианте осуществления, то компонентам, таким же как в первом варианте осуществления, будут назначены те же самые ссылочные номера и их объяснение будет опущено.
Вторая схема 113 электропитания снабжает мощностью ДС для схемы 123 модуляции блока 120 реакции, причем мощность ДС создается посредством выпрямления и сглаживания высокочастотной мощности, индуцированной во вторичной силовой катушке 111, когда мощность подается от блока 1 передачи 1 мощности к блоку 110 приема мощности.
То есть количество мощности, передаваемой от блока 2 опроса источника электропитания A, очень мало и количество рабочей мощности, создаваемой в схеме 122 электропитания блока 120 реакции, также очень мало. Однако, когда вторая схема 113 электропитания создает рабочую мощность блока 120 реакции, используя высокочастотную мощность, принимаемую блоком 110 приема мощности, существует преимущество, состоящее в повышении точности обнаружения блока 3 обнаружения сигнала, увеличивая мощность, передаваемую от блока 120 реакции.
Четвертый вариант осуществления
Как показано на фиг.14, в соответствии с четвертым вариантом осуществления настоящего изобретения бесконтактная система электропитания обладает тем признаком, что нагрузочное устройство В дополнительно включает в себя вторую схему 113 электропитания для создания рабочей мощности блока 120 реакции из высокочастотной мощности, индуцированной во вторичной силовой катушке 111, и блок 124 передачи сигнала нагрузочного устройства управляется мощностью, создаваемой во второй схеме 113 электропитания, чтобы передавать сигнал передачи, и источник электропитания А дополнительно включает в себя блок 5 приема сигнала со стороны источника электропитания для приема сигнала, переданного от блока 124 передачи сигнала нагрузочного устройства, и запоминающее устройство 6 для хранения информации, переданной с помощью передаваемого сигнала.
Дополнительно, поскольку другие конфигурации являются такими же, как в первом варианте осуществления, компонентам, которые имеются в первом варианте осуществления, будут назначены те же самые ссылочные номера и их объяснение будет опущено.
Блок 124 передачи сигнала нагрузочного устройства имеет катушку 124a передачи и передает через катушку 124a передачи, например, передаваемый частотно-модулированный сигнал. Блок 5 приема сигнала со стороны источника электропитания имеет приемную катушку 50, связанную магнитно с катушкой 124a передачи, и восстанавливает первоначальную информацию, демодулируя высокочастотное напряжение (передаваемый частотно-модулированный сигнал), индуцированное в приемной катушке 50. Демодулированная информация хранится в запоминающем устройстве 6. На информацию, передаваемую от нагрузочного устройства В на источник электропитания А с помощью передаваемого сигнала, не накладывается никакого особого ограничения.
Как описано выше, в этом варианте осуществления различные информационные данные могут передаваться между блоком 124 передачи сигнала нагрузочного устройства и блоком 5 приема сигнала со стороны источника электропитания.
Пятый вариант осуществления
Как показано на фиг.15, в соответствии с пятым вариантом осуществления настоящего изобретения бесконтактная система электропитания обладает тем признаком, что источник электропитания А дополнительно включает в себя схему 7 генерации информационного сигнала источника электропитания для создания информационного сигнала, который должен передаваться от источника электропитания А к нагрузочному устройству В, и схему 8 модуляции для модуляции высокочастотной мощности, которая должна передаваться от блока 1 передачи мощности информационным сигналом, и нагрузочное устройство В дополнительно включает в себя схему 140 демодуляции для демодуляции высокочастотной мощности, индуцированной во вторичной силовой катушке 111, чтобы восстанавливать информационный сигнал, запоминающее устройство 150 для хранения информации (информационного сигнала), демодулированной схемой 140 демодуляции, и блок 160 управления для управления нагрузкой 100, основываясь на информации. Дополнительно, поскольку другие конфигурации являются такими же, как в первом варианте осуществления, компонентам, которые имеются в первом варианте осуществления, будут назначены те же самые ссылочные номера и их объяснение будет опущено.
Схема 8 модуляции выполняет модуляцию (амплитудную модуляцию, частотную модуляцию или фазовую модуляцию) высокочастотного напряжения (сигнала несущей), выводимого схемой 11 инвертора, информационным сигналом (видеосигналом), созданным схемой 7 генерации информационного сигнала источника электропитания. Схема 140 демодуляции демодулирует высокочастотное напряжение (модулированный сигнал несущей), индуцированное во вторичной силовой катушке 111, чтобы восстановить информационный сигнал. Дополнительно, информационный сигнал не накладывает никакого конкретного ограничения на информацию, передаваемую от источника электропитания А на нагрузочное устройство В.
Как описано выше, в этом варианте осуществления от источника электропитания А к нагрузочному устройству В могут передаваться различные информационные данные.
Шестой вариант осуществления
Как показано на фиг.16, в соответствии с шестым вариантом осуществления настоящего изобретения бесконтактная система электропитания обладает тем признаком, что нагрузочное устройство В дополнительно включает в себя блок 170 передачи сигнала реакции, который управляется высокочастотной мощностью, индуцированной во вторичной силовой катушке 111, чтобы передавать сигнал реакции через вторичную силовую катушку 111, и источник электропитания А дополнительно включает в себя блок 9 приема сигнала реакции для приема сигнала реакции через первичную силовую катушку 10, связанную магнитно со вторичной силовой катушкой 111.
Дополнительно, поскольку другие конфигурации являются такими же, как в первом варианте осуществления, компонентам, которые имеются в первом варианте осуществления, будут назначены те же самые ссылочные номера и их объяснение будет опущено.
Блок 170 передачи сигнала реакции имеет схему 171 электропитания для создания рабочей мощности из высокочастотной мощности, индуцированной во вторичной силовой катушке 111, и схему 172 модуляции, которая управляется рабочей мощностью, созданной схемой 171 электропитания, для выполнения модуляции (например, амплитудной модуляции) индуцированного напряжения (сигнал несущей) вторичной силовой катушки 111. То есть блок 170 передачи сигнала реакции может передавать сигнал реакции, только когда мощность подается от блока 1 передачи мощности источника электропитания А на блок 110 приема мощности нагрузочного устройства В. Блок 170 передачи сигнала реакции не может передавать сигнал реакции, когда мощность не подается от блока 1 передачи мощности к блоку 110 приема мощности. Блок 170 передачи сигнала реакции может непрерывно или периодически передавать сигнал реакции.
Блок 9 приема сигнала реакции демодулирует сигнал реакции посредством детектирования огибающей сигнала высокочастотного напряжения первичной силовой катушки 10, чтобы вывести демодулированный сигнал на блок 4 управления.
В этом случае, в то время когда мощность передается от блока 1 передачи мощности, блоку 3 обнаружения сигнала трудно обнаруживать сигнал из-за большой шумовой компоненты, добавляемой к сигналу высокочастотного напряжения, создаваемому в первичной сигнальной катушке 20. Соответственно, в первом варианте осуществления схема 11 инвертора блока 1 передачи мощности запускается периодически таким образом, что блок 3 обнаружения сигнала может обнаруживать сигнал во время периода паузы схемы 11 инвертора.
С другой стороны, в этом варианте осуществления блок 4 управления источника электропитания А непрерывно осуществляет передачу мощности блока 1 передачи мощности, как только блок 3 обнаружения сигнала обнаруживает сигнал, представляющий присутствие нагрузочного устройства В; и блок 4 управления останавливает передачу мощности блока 1 передачи мощности, если период, в течение которого блок 9 приема сигнала реакции не принимает сигнал реакции, превышает назначенный период (значительно более длительный по сравнению с циклом передачи сигнала реакции, когда сигнал реакции передается периодически), и блок 4 управления продолжает передачу мощности блока 1 передачи мощности, если период, в течение которого блок 9 приема сигнала реакции не принимает сигнал реакции, не превышает назначенный период.
Соответственно, в этом варианте осуществления блок 4 управления продолжает или останавливает передачу мощности блока 1 передачи мощности, основываясь на том, принимает ли блок 9 приема сигнала реакции сигнал реакции, переданный от блока 170 передачи сигнала реакции нагрузочного устройства В. Таким образом, даже при том что точность обнаружения блока 3 обнаружения сигнала снижается во время непрерывной передачи мощности блока 1 передачи мощности, схема 11 инвертора блока 1 передачи мощности может запускаться непрерывно (не периодически), в то же время предотвращая сбой блока 1 передачи мощности.
Следовательно, существует преимущество повышения эффективности источника электропитания по сравнению со случаем, в котором схема 11 инвертора запускается периодически, как в первом варианте осуществления.
Седьмой вариант осуществления
Как показано на фиг.17, в соответствии с седьмым вариантом осуществления настоящего изобретения бесконтактная система электропитания обладает тем признаком, что нагрузочное устройство В дополнительно включает в себя блок 130 управления нагрузочным устройством для передачи управляющей команды от блока 120 реакции и блока 170 передачи сигнала реакции на блок 4 управления источника электропитания А, чтобы инструктировать остановку передачи мощности блоком 1 передачи мощности или снижения уровня передачи мощности. Дополнительно, поскольку другие конфигурации являются такими же, как во втором и шестом вариантах осуществления, компонентам, которые имеются во втором и шестом вариантах осуществления, будут назначены те же самые ссылочные номера и их объяснение будет опущено.
Во втором варианте осуществления, когда аккумуляторная батарея, служащая нагрузкой 100, полностью заряжена, блок 130 управления нагрузочного устройства останавливает схему 123 модуляции блока 120 реакции, так что блок 3 обнаружения сигнала источника электропитания A не обнаруживает сигнал. Однако, как описано в шестом варианте осуществления, когда схема инвертора 11 запускается непрерывно, блок 3 обнаружения сигнала может ошибочно обнаружить шумовой компонент как сигнал, даже если схема 123 модуляции блока 120 реакции остановлена.
Соответственно, в этом варианте осуществления, блок 130 управления нагрузочного устройства останавливает как схему 123 модуляции блока 120 реакции 120, так и схему 172 модуляции блока 170 передачи сигнала реакции, когда аккумуляторная батарея, служащая нагрузкой 100, полностью заряжена. Следовательно, блок 9 приема сигнала реакции не принимает сигнал реакции, даже когда блок 3 обнаружения сигнала источника электропитания A обнаруживает неправильный сигнал. Таким образом, блок 4 управления может остановить передачу мощности блока 1 передачи мощности.
Как описано выше, в настоящем варианте осуществления, даже когда схема 11 инвертора запускается непрерывно, возможно надежно управлять блоком 1 передачи мощности, повышая надежность передачи сигналов.
Хотя изобретение было показано и описано со ссылкой на варианты осуществления, специалисты в данной области техники должны понимать, что могут вноситься различные изменения и модификации, не отступая от объема изобретения, как он определен в приведенной далее формуле изобретения.
Реферат
Изобретение относится к электротехнике, к бесконтактной системе электропитания, использующей электромагнитную индукцию. Технический результат состоит в сокращении потребления мощности источника питания в дежурном режиме количества катушек устройства нагрузки. Бесконтактная система электропитания включает в себя источник электропитания для передачи высокочастотной мощности и нагрузочное устройство, которое принимает высокочастотную мощность в бесконтактном режиме за счет электромагнитной индукции, чтобы подать ее нагрузке. Источник электропитания включает в себя блок передачи мощности, имеющий первичную силовую катушку и схему инвертора, блок опроса, имеющий, по меньшей мере, одну первичную сигнальную катушку и колебательный контур, блок обнаружения сигнала и блок управления. Нагрузочное устройство включает в себя блок приема мощности, имеющий вторичную силовую катушку, связанную магнитно с первичной силовой катушкой, и блок преобразования мощности, вторичную сигнальную катушку, связанную магнитно с первичной сигнальной катушкой, и блок реакции, который управляется электродвижущей силой, индуцированной во вторичной сигнальной катушке. Блок управления останавливает передачу мощности, когда никакой сигнал не обнаруживается, и выполняет передачу мощности, когда сигнал обнаруживается. 18 з.п. ф-лы, 19 ил.
Формула
источник электропитания для передачи высокочастотной мощности; и
нагрузочное устройство, которое бесконтактно принимает высокочастотную мощность, передаваемую от источника электропитания посредством электромагнитной индукции, чтобы подавать высокочастотную мощность нагрузке,
в которой источник электропитания включает в себя блок передачи мощности, имеющий первичную силовую катушку для передачи мощности и схему инвертора для подачи высокочастотного тока первичной силовой катушке; блок опроса, имеющий первичную сигнальную катушку для приема сигнала от нагрузочного устройства и колебательного контура, причем первичная сигнальная катушка подключается между выходными выводами колебательного контура; блок обнаружения сигнала для обнаружения сигнала, принятого первичной сигнальной катушкой; и блок управления для управления блоком передачи мощности в соответствии с сигналом, обнаруженным блоком обнаружения сигнала,
в которой нагрузочное устройство включает в себя нагрузку; блок приема мощности, имеющий вторичную силовую катушку для приема мощности, которая связана магнитно с первичной силовой катушкой, и блок преобразования мощности, который преобразует высокочастотную мощность, индуцированную во вторичной силовой катушке, в мощность для нагрузки; вторичную сигнальную катушку, которая связана магнитно с первичной сигнальной катушкой; и блок реакции, который управляется электродвижущей силой, индуцированной во вторичной сигнальной катушке, чтобы передавать сигнал от вторичной сигнальной катушки, и в которой блок управления источника электропитания не осуществляет передачу мощности от блока передачи мощности, когда блок обнаружения сигнала не обнаруживает сигнал, и осуществляет передачу мощности от блока передачи мощности, когда блок обнаружения сигнала обнаруживает сигнал.
в которой блок опроса источника электропитания позволяет колебательному контуру генерировать колебания на частотах, изменяющихся соответственно типам нагрузочного устройства и добавочных нагрузочных устройств.
в которой источник электропитания включает в себя блок приема сигнала реакции для приема сигнала реакции через первичную силовую катушку, связанную магнитно со вторичной силовой катушкой, и
в которой, когда блок управления источника электропитания выполняет передачу мощности от блока передачи мощности в соответствии с сигналом, обнаруженным блоком обнаружения сигнала, блок управления останавливает передачу мощности от блока передачи мощности, если период, в течение которого блок приема сигнала реакции не принимает сигнал реакции, превышает определенный период, и блок управления продолжает передачу мощности от блока передачи мощности, если период, в течение которого блок приема сигнала реакции не принимает сигнал реакции, не превышает определенный период.
Документы, цитированные в отчёте о поиске
Устройство для бесконтактной передачи электрических сигналов и/или энергии
Комментарии