Способ управления действием или последовательностью действий сельскохозяйственной машины - RU2483509C2
Код документа: RU2483509C2
Чертежи
Описание
Изобретение относится к способу управления действием или последовательностью действий сельскохозяйственной машины, снабженной электронным блоком и сцепленной с трактором, который содержит по меньшей мере одно средство управления.
Изобретение может быть использовано в области сельскохозяйственного машиностроения. В этой области ведутся многочисленные инновационные разработки, в основном связанные с внедрением электроники. Эти разработки призваны усовершенствовать существующие эксплуатационные характеристики как в тракторе, так и в сельскохозяйственной машине.
Для выполнения различных полевых работ и/или уборки кормовых культур обычно используют сельскохозяйственные машины, приводимые в движение тракторами. Трактор содержит, в частности, двигатель, кабину, средства управления, приводимые в действие соответствующим устройством управления, и вычислительное устройство. Устройство управления содержит рычаги и/или кнопки для управления различными средствами управления, такими как задний и передний подъемники, задний и передний валы отбора мощности, гидравлические распределители. Вычислительное устройство содержит запоминающее устройство и по меньшей мере одну программу. В частности, вычислительное устройство соединено с вычислительным блоком управления подъемником и с вычислительным блоком управления двигателем и трансмиссией.
Управление трактором требует от пользователя осуществления неоднократно повторяющихся действий, в частности, при выполнении работ в поле (вспашка, подготовка почвы, посев), где на каждом конце поля необходимо делать разворот. Пользователь должен в течение очень короткого времени и в определенном порядке включать и/или выключать несколько средств управления при помощи устройства управления. Чтобы снизить трудоемкость и предотвратить ошибки в манипулировании рычагами и кнопками, очередность действий во время разворота можно записать в программу вычислительного устройства в виде последовательности. Последовательностью называется совокупность действий, осуществляемых в логическом и хронологическом порядке и в течение заданного времени. Программа содержит серию последовательностей. Таким образом, записанная последовательность разворота может быть просто воспроизведена автоматически на каждом конце поля при помощи всего одного вмешательства на уровне устройства управления трактором.
Сельскохозяйственные машины содержат набор специальных механизмов, предназначенных для выполнения определенной работы. Этот набор механизмов усложняет использование машины. Как известно, сельскохозяйственной машиной управляют при помощи электронного блока. Электронный блок содержит микропроцессор с соответствующими одной или несколькими программами и управляет различными специальными механизмами через последовательности. Программа адаптирована для машины и, в частности, для выполнения машиной различных функций. Микропроцессор принимает и обрабатывает данные от системы контроля и команды, поступающие с пульта управления. Так же, как и для трактора, программа машины может содержать ряд предназначенных для осуществления действий. Таким образом, во время разворота одна единственная команда пользователя с пульта управления сельскохозяйственной машины автоматически запускает соответствующую последовательность. Различные действия на уровне машины происходят согласно заранее определенной последовательности в случае необходимости с учетом сигналов, выдаваемых системой контроля.
Электроника управления трактором не зависит от электроники управления сцепленной с трактором машиной. Так, при приближении к концу поля пользователь запускает последовательность разворота трактора через устройство управления, затем запускает последовательность разворота машины с пульта управления. Во время этого маневра пользователь должен контролировать направление и скорость трактора и, в случае необходимости, должен изменять скорость. Он должен также контролировать управление в зависимости от характеристик используемого трактора: максимальный угол поворота, блокировка дифференциала и адаптировать маневр в зависимости от того, работает ли он с узкой или широкой машиной, короткой или длинной. Таким образом, маневрирование при развороте требует наличия опыта и концентрации внимания.
В документе FR 2764401 описан способ автоматизации выполнения повторяющихся работ водителем трактора, когда с последним сцеплена сельскохозяйственная машина. Этот способ содержит этап введения в память действий, запускаемых водителем через классические средства управления трактором, и этап воспроизведения этих действий после получения команды от водителя. Записанные в память действия являются действиями, осуществляемыми водителем во время ручного выполнения последовательности повторяющихся задач, например, во время операций разворота. В вычислительное устройство трактора должны быть предварительно введены параметры машины с целью их учета. Тем не менее такое решение имеет свои ограничения, если требуется управлять более сложной машиной, имеющей свои собственные средства управления и приводы. В этом случае вычислительное устройство трактора не может знать и контролировать действия, свойственные машине, по причине отсутствия достаточно разработанной сети связи.
В случае, когда машина оборудована электронным блоком со своей рабочей программой, пользователь должен вводить в электронный блок параметры, связанные с трактором. В случае смены трактора эти параметры необходимо перенастроить.
В документе DE 19943561 описан трактор с вычислительным устройством, которое содержит программы регулировки и/или работы для разных машин. Выбор соответствующей программы вычислительным устройством для управления машиной предполагает наличие достаточно разработанной сети связи, чтобы трактор мог воспринимать и контролировать действия машины. На сегодняшний день нет такой стандартной сети, обеспечивающей связь между машинами и разными тракторами, имеющимися на рынке.
В документе DE 10335112 описана сельскохозяйственная машина, содержащая электронный блок и несколько датчиков, образующих собственную систему контроля машины. Эти датчики направляют данные в электронный блок посредством беспроводной связи для установки рабочих параметров машины, поэтому эти датчики не могут обнаружить изменение состояния средства управления, такого как вал отбора мощности трактора.
Задачей настоящего изобретения является устранение вышеупомянутых недостатков.
Для решения поставленной задачи предложен способ управления, позволяющий упростить манипуляции пользователя сельскохозяйственной машины.
Важной отличительной особенностью изобретения является то, что осуществляемое действие, или последовательность действий сельскохозяйственной машины, запускается автоматически через контроль указанного электронного блока путем обнаружения изменения состояния одного из средств управления трактора при помощи системы контроля, направляющей информацию в этот электронный блок. Таким образом, управление одним или несколькими действиями не зависит от опыта или от технических знаний пользователя. Способ управления в соответствии с настоящим изобретением позволяет освободить пользователя машины от управления механизмами машины. Координация управления между трактором и машиной является оптимизированной. Кроме того, такой способ управления можно применять на любом тракторе, с которым соединена машина.
Объектом настоящего изобретения является также сельскохозяйственная машина для осуществления такого способа.
Другие особенности и преимущества изобретения определены в формуле изобретения и будут более понятны из нижеследующего описания неограничивающих примеров со ссылками на прилагаемые чертежи.
На фиг.1 схематично показана соединенная с трактором сельскохозяйственная машина в соответствии с настоящим изобретением;
на фиг.2 показан первый пример выполнения машины, сцепленной с трактором, вид сбоку;
на фиг.3 показан второй пример выполнения машины в соответствии с настоящим изобретением, вид сверху;
на фиг.4 детально показана часть машины, изображенной на фиг.3, вид сзади.
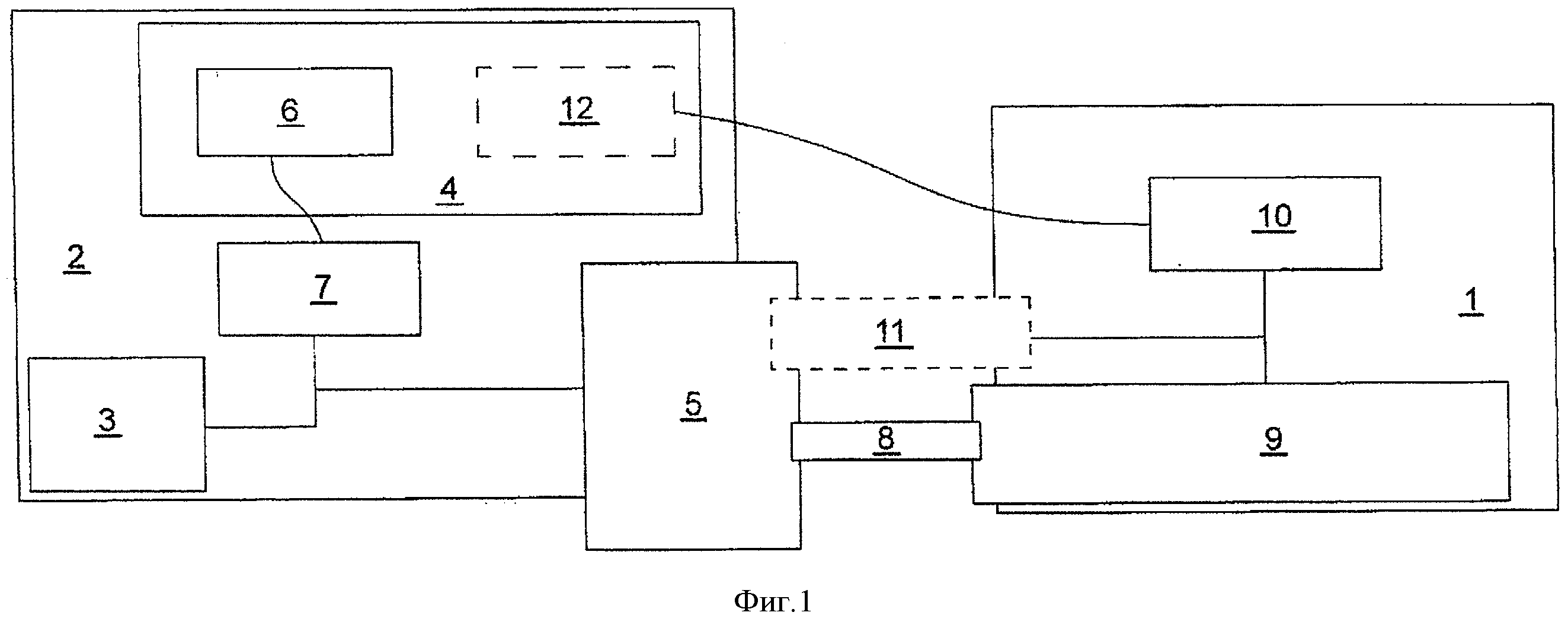
Схематично показанная на фиг.1 сельскохозяйственная машина 1 соединена с трактором 2. Сельскохозяйственная машина 1 предназначена для выполнения рабочих функций (подготовка почвы, посев, сеноуборочные работы и т.д.). Как известно, трактор содержит трансмиссию, приводимую в действие двигателем 3, кабину 4 управления, по меньшей мере одно средство 5 управления, управляемое устройством 6 управления и вычислительным устройством 7. Вычислительное устройство 7 содержит несколько вычислительных подблоков и выполняет вычислительные функции, являясь электронным блоком контроля трактора 2. Вычислительное устройство 7 позволяет контролировать рабочие параметры трактора 2 и выявлять возможные проблемы, для чего оно соединено с набором датчиков и зондов, которые выдают информацию о состоянии двигателя 3 и средств 5 управления.
Сельскохозяйственная машина 1 содержит сцепное устройство 8, набор специальных механизмов 9, предназначенных для выполнения определенных работ, и электронный блок 10. Электронный блок 10 содержит микропроцессор и несколько программ и управляет различными специальными механизмами при помощи последовательностей действий. В зависимости от варианта выполнения, машина может содержать пульт 12 управления. Машина 1 сцеплена с трактором 2 при помощи сцепного устройства 8. Трактор 2 приводит в движение машину 1, перемещая ее в направлении А и в случае необходимости приводит в действие ее специальные механизмы 9.
Приведение в действие по меньшей мере одного из средств 5 управления трактора 2 и/или одного или нескольких специальных механизмов 9 машины 1 отслеживается системой 11 контроля. Эта система 11 контроля позволяет получать данные о рабочих характеристиках трактора 2 и/или машины 1. Система 11 контроля содержит датчики и/или зонды. Соответствующие датчики или зонды выбирают в зависимости от типа контролируемого средства 5 управления или специального механизма машины. Данные, снимаемые этими датчиками или зондами, направляются в электронный блок 10, выполненный с возможностью их обработки. Существуют датчики для измерения давления, расхода или скорости вращения. Можно также использовать любой другой вид датчиков, выдающих данные, позволяющие определять рабочие характеристики средства 5 управления или специального механизма.
Согласно важной особенности изобретения, действие или последовательность действий для осуществления на уровне указанной машины 1 запускается автоматически через контроль электронного блока 10 при обнаружении изменения состояния одного из средств 5 управления указанного трактора 2 при помощи системы 11 контроля, направляющей информацию в указанный электронный блок 10.
Таким образом, изменение состояния одного из средств 5 управления, связанного с машиной 1, обнаруживается при помощи указанной системы 11 контроля. Система 11 контроля направляет информацию в электронный блок 10. При обнаружении изменения состояния одного из средств 5 управления через электронный блок 11 подается команда на действие или последовательность действий для указанной машины 1. Последовательностью называется действие или совокупность действий, предназначенных для выполнения в логическом и хронологическом порядке и в заданное время. Трактор 2 приводит в движение машину 1, которая содержит вращающиеся детали и/или силовые цилиндры, через по меньшей мере одно средство 5 управления. Команда на действие подается исключительно через электронный блок 10 машины 1 в автоматическом режиме. Благодаря этому обнаружению изменения состояния, согласованность действий между трактором 2 и машиной 1 оптимизируется. Таким образом, управление по меньшей мере одним специальным механизмом машины 1 не зависит ни от опыта, ни от технических знаний пользователя.
Автоматический режим является режимом обнаружения команд по меньшей мере одного средства 5 управления трактором 2. В этом режиме обнаружение изменения состояния средства 5 управления приводит к подаче команды на одно или несколько действий на уровне машины 1. За счет этого обнаружения электронный блок 10 машины 1 получает информацию о действии или намерении пользователя, в частности, относительно его манипуляции устройством 6 управления трактора 2. Изменение состояния одного из средств 5 управления может также входить в последовательность трактора 2, предварительно запущенную пользователем.
Согласно предпочтительному варианту выполнения, система 11 контроля основана только на датчике(ах), связанном(ых) с машиной 1. Она контролирует датчики, установленные на машине 1, и подает информацию в электронный блок 10 машины 1. В другом варианте выполнения датчики могут быть установлены как на машине 1, так и на тракторе 2. В другом случае датчики установлены только на тракторе 2, и электронный блок 10 имеет доступ к информации через сеть связи или через прямой вход в кабине 4 управления при помощи разъема.
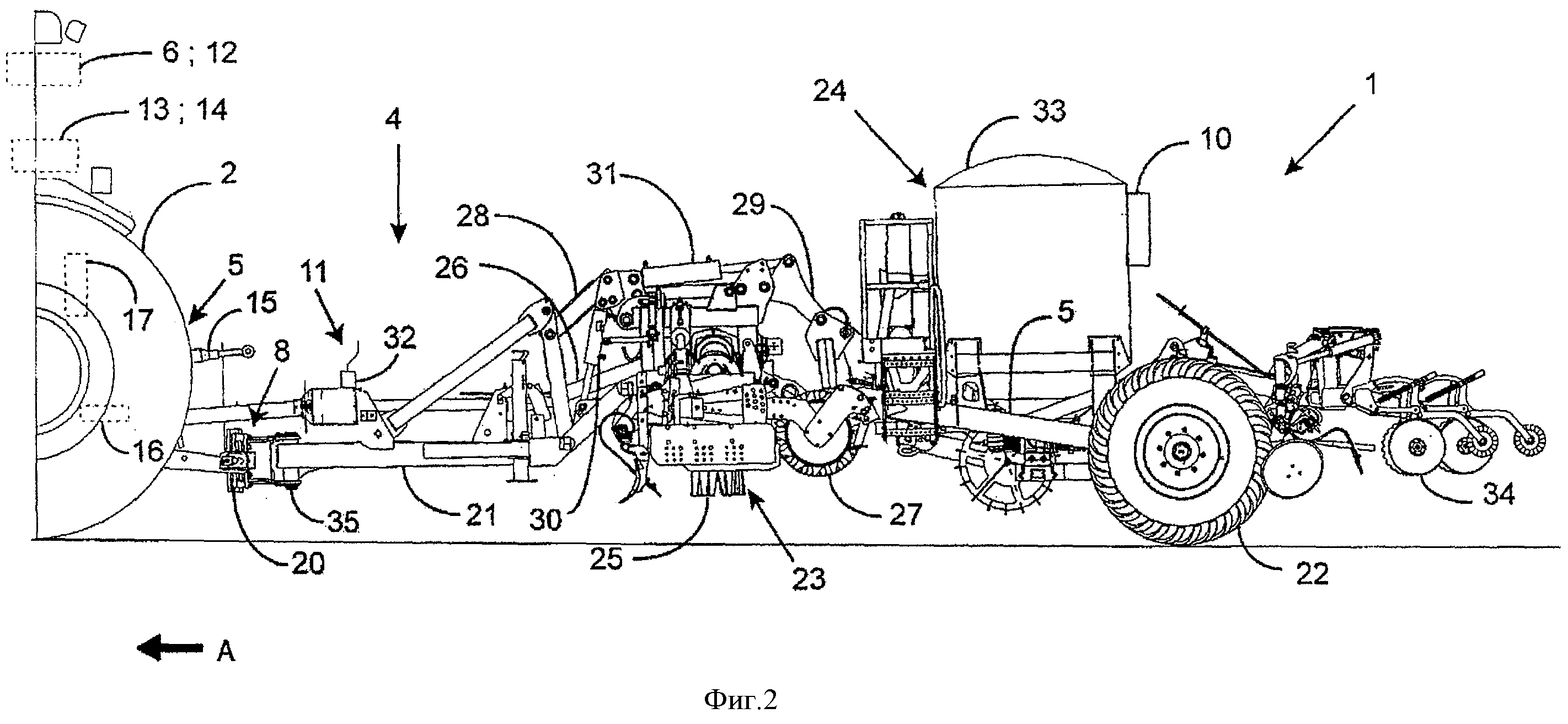
Устройство 6 управления трактором 2 находится в кабине 4 управления. Оно содержит интерфейс управления и/или дисплей для выведения поступающих от вычислительного устройства 7 данных пользователю. Интерфейс управления позволяет манипулировать средствами 5 управления при помощи классических средств, таких как рычаги 13 и/или кнопки 14. Средствами 5 управления трактора 2 для приведения в действие машины 1 предпочтительно являются приводы, такие как сцепка 15 или вал 16 отбора мощности. Средством 5 управления может быть также распределитель мощности, такой как гидравлический распределитель 17 или электрический распределитель мощности. Как правило, и как показано на фиг.2, в стандартное оборудование трактора 2 входят сцепка 15 и вал 16 отбора мощности, находящиеся сзади, а также гидравлические распределители 17. Более современные тракторы содержат также сцепку и вал отбора мощности спереди.
На фиг.2 показана сельскохозяйственная машина 1 типа комбинированной сеялки, сцепленная с трактором 2. Трактор 2 содержит заднюю сцепку 15 и задний вал 16 отбора мощности. Предпочтительно сцепка 15 выполнена трехточечной. Эта машина является полунавесной и соединена с двумя нижними тягами трехточечной сцепки трактора 2 при помощи сцепной штанги 20. Комбинированная сеялка содержит дышло 21 и опирается на землю через базу 22, оборудованную колесами. Она содержит орудие 23 для обработки почвы и сеялку 24. Орудие 23 для обработки почвы готовит семенное ложе. В данном примере представлена ротационная борона, которая содержит роторы, соединенные с кессоном, при этом каждый из роторов оборудован двумя ножами 25. Роторы приводятся во вращение вокруг соответствующей вертикальной оси при помощи вала 16 отбора мощности трактора 2. Вал 16 отбора мощности вращает роторы через центральную коробку при помощи трансмиссии 26 в виде телескопического вала с универсальными шарнирами. Измельчение земли зависит от скорости вращения роторов, от скорости движения машины и от плотности почвы. В задней части ротационная борона содержит ограничительный каток 27, предназначенный также для контроля глубины обработки почвы.
Орудие 23 расположено по существу горизонтально и перпендикулярно к направлению движения А. Оно находится между дышлом 21 и базой 22. С одной стороны одно соединено с дышлом 21 через первый параллелограмм 28, а с другой стороны - с базой 22 через второй параллелограмм 29. Каждый параллелограмм 28, 29 может деформироваться при помощи соответствующего силового цилиндра 30, 31. Параллелограммы 28, 29 обеспечивают по существу вертикальный подъем орудия 23 и его перемещение по существу параллельно почве. Перемещение, по существу параллельное почве, обеспечивается за счет по существу синхронизированного питания силовых цилиндров 30, 31. Более подробно эти элементы описаны в документе FR 0553622.
Во время работы пользователь не влияет на высоту сцепки 15 трактора 2. Управление вертикальным перемещением орудия 23 осуществляет электронный блок 10 вместе с системой 11 контроля. Электронный блок 10 соединен с системой 11 контроля, содержащей также датчик 32, контролирующий скорость вращения на уровне трансмиссии 26 ротационной бороны. За счет контроля скорости вращения трансмиссии 26 электронный блок 10 получает информацию о вращении вала 16 отбора мощности трактора 2. При работе трансмиссия 26 соединяется с валом 16 отбора мощности трактора 2.
В зависимости от данных о работе и/или положении, поступающих от системы 11 контроля, электронный блок 10 может автоматически управлять действием или действиями специальных механизмов 9 машины 1. В электронном блоке 10 записаны программы в виде последовательностей для соответствующих действий, запускаемых, например, во время разворотов в конце поля. Таким образом, электронный блок 10 подает команду на следующее действие: подъем орудия 23 вверх путем подачи питания на два силовых цилиндра 30 и 31, когда датчик 32 определяет нулевую скорость вращения на уровне трансмиссии 26. Когда скорость вращения трансмиссии 26 равна нулю, это значит, что пользователь нажал на кнопку 14 и повернул рычаг 13 для остановки вала 16 отбора мощности, или что остановка вала 16 отбора мощности вошла неотъемлемой частью в последовательность действий трактора 2, запущенную пользователем. Известно программирование соответствующих действий, включаемых во время разворота в конце поля в виде последовательностей при помощи устройства 6 управления трактора 2.
Электронный блок 10 машины 1 управляет специфическими функциями как орудия 23, так и сеялки 24. Сеялка 24 установлена позади орудия 23 в направлении движения А. Таким образом, подготовка почвы и посев происходят во время одного прохода. Благодаря этой комбинации, сокращается время работ для посева, ограничивается утрамбовка почвы, и уменьшаются затраты. Как известно, сеялка 24 содержит, в частности, бункер 33 и устройства 34 заделки или посадки в почву. Предпочтительно бункер 33 установлен на указанной базе 22, а устройства 34 посадки в почву установлены сзади указанной базы 22 с возможностью перемещения по высоте через сцепку и силовые цилиндры. Бункер 33 является емкостью для семян и распределителем, позволяющим подавать из бункера 33 определенное количество семян и поддерживать постоянную дозировку, независимо от рабочих условий. Для сеялки с пневматической системой подачи семена направляются к устройствам 34 воздушным потоком по гибким трубкам. Воздушный поток создается турбиной, приводящейся во вращение, например, посредством вала 16 отбора мощности трактора 2. Благодаря пневматической подаче семян в устройства 34, ширина обработки не зависит от ширины бункера 33. Устройство 34 создает борозду определенной глубины для посева семян и их закрывания землей. Как правило, устройство 34 посадки в землю связано с устройством закрывания.
Поскольку сеялка 24 установлена сзади орудия 23, необходимо иметь возможность смещения сеялки, чтобы предотвратить посев семян в не размельченную и в не выровненную почву. Специальная последовательность «начала работы» электронного блока 10 позволяет управлять смещением сеялки 24 относительно орудия 23. Электронный блок 10 выполнен с возможностью определения места, где сеялка 24 должна начать посев, посредством собственных характеристик машины 1. Смещение между введением в почву орудия 23 и введением в почву устройств 34 посадки сеялки 24 позволяет уменьшить ширину краевых полос на концах поля.
Таким образом, благодаря автоматическому режиму определения, электронный блок 10 может подать команду на последовательность действий: подъем ротационной бороны, остановка распределения и подъем устройств 34 посадки в почву, когда вращение трансмиссии 26 и, соответственно, вала 16 отбора мощности останавливается при приближении к концу поля. Для этого пользователь нажимает либо на кнопку 14 для остановки вращения вала 16 отбора мощности, либо на кнопку запуска последовательности действий трактора 2, включающей в себя остановку вращения вала 16 отбора мощности. Как только вал 16 отбора мощности перестает вращаться, орудие 23 отходит от почвы, а трактор 2 продолжает движение, при этом устройства 34 сеялки автоматически поднимаются для осуществления разворота в конце поля. Для возобновления работы, когда машина 1 и трактор 2 снова оказываются на одной линии, пользователь нажимает на кнопку для приведения во вращение вала 16 отбора мощности. Датчик 32 отмечает это изменение состояния и направляет информацию в электронный блок 10, который подает команду на последовательность действий: перемещение силовых цилиндров 30 и 31, опускание на почву орудия 23, запуск распределения зерна и опускание устройств 34 посадки в почву для посева. Орудие 23 и сеялка 24 находятся в контакте с почвой во время работы, тогда как для транспортировки их поднимают.
Благодаря такому способу управления с автоматическим детектированием, упрощаются манипуляции пользователя. Пользователь воздействует только на рычаг 13 или на кнопку 14 перед разворотом и может больше сосредоточиться на управлении трактором 2. Последовательность разворота машины 1 синхронизирована с последовательностью разворота трактора 2. Производительность машины повышается, так как сокращается время, необходимое для маневров при развороте. Исключается вероятность столкновения трактора 2 и машины 1. Кроме того, электронный блок 10 содержит параметры, характерные для машины, и все программы, необходимые для ее работы. Таким образом, даже если машина характеризуется сложным ходом, электронный блок 10 может осуществлять ее управление. Он использует работу системы 11 контроля, в частности, данные от установленных на машине датчиков. Этот способ управления остается функциональным, независимо от типа трактора, который приводит в движение машину.
Сцепная штанга 20 соединена с дышлом 21 через шарнир 35 с по существу вертикальной осью. Благодаря этому шарниру 35, обеспечивающему большие углы поворота между дышлом 21 и сцепной штангой 20, соединенной с нижними тягами сцепки трактора 2, площадь маневра в конце поля, в частности во время разворота, уменьшается, и повышается маневренность для выравнивания машины 1 с трактором 2. Эти большие углы поворота требуют остановки вала 16 отбора мощности во время каждого разворота, поэтому описанный способ представляет особый интерес. В не показанном на фигурах варианте выполнения конец дышла 21 содержит сцепное кольцо или сцепной шар. В этом случае отпадает необходимость в шарнире 35, так как сцепное кольцо или шар обеспечивают поворот вокруг вертикальной оси.
При помощи команд с электронного блока 10 можно осуществлять другие специфические функции машины 10, например функцию «разметки» или функцию «внесения удобрений». Сеялка 24 содержит боковые маркеры, которые размечают линии, по которым трактор 2 должен следовать во время следующего прохода. При помощи соответствующей программы электронный блок 10 управляет опусканием или подъемом боковых маркеров, соответственно. Когда сеялка 24 выполняет также функцию внесения удобрений, посев и внесение удобрений происходят во время одного прохода. В этом случае электронный блок 10 управляет также включением/выключением устройства дозировки удобрений. Кроме устройств посадки в почву 34, таких как сошники для посева, сеялка 24 оборудована также сошниками для внесения удобрений. В этом случае бункер 33 разделен на две части, с одной стороны - для семян, а с другой стороны - для удобрения. В альтернативном варианте можно предусмотреть дополнительный бункер, спаренный с бункером 33 сеялки.
Для складывающейся машины трансмиссию 26 заменяют на первичную трансмиссию и две вторичные трансмиссии. На каждой вторичной трансмиссии установлен датчик 32. Согласно другому варианту выполнения, не показанному на чертежах, орудие 23 и сеялку 24 выполняют из более чем двух частей.
В зависимости от технических возможностей машины 1 электронный блок 10 может состоять из нескольких подблоков. Для сельскохозяйственной машины 1 с пультом 12, последний размещают в кабине 4 управления. Он содержит элементы управления и/или индикаторы. Пульт 12 может быть выполнен с ручкой управления, которая облегчает доступ к средствам управления.
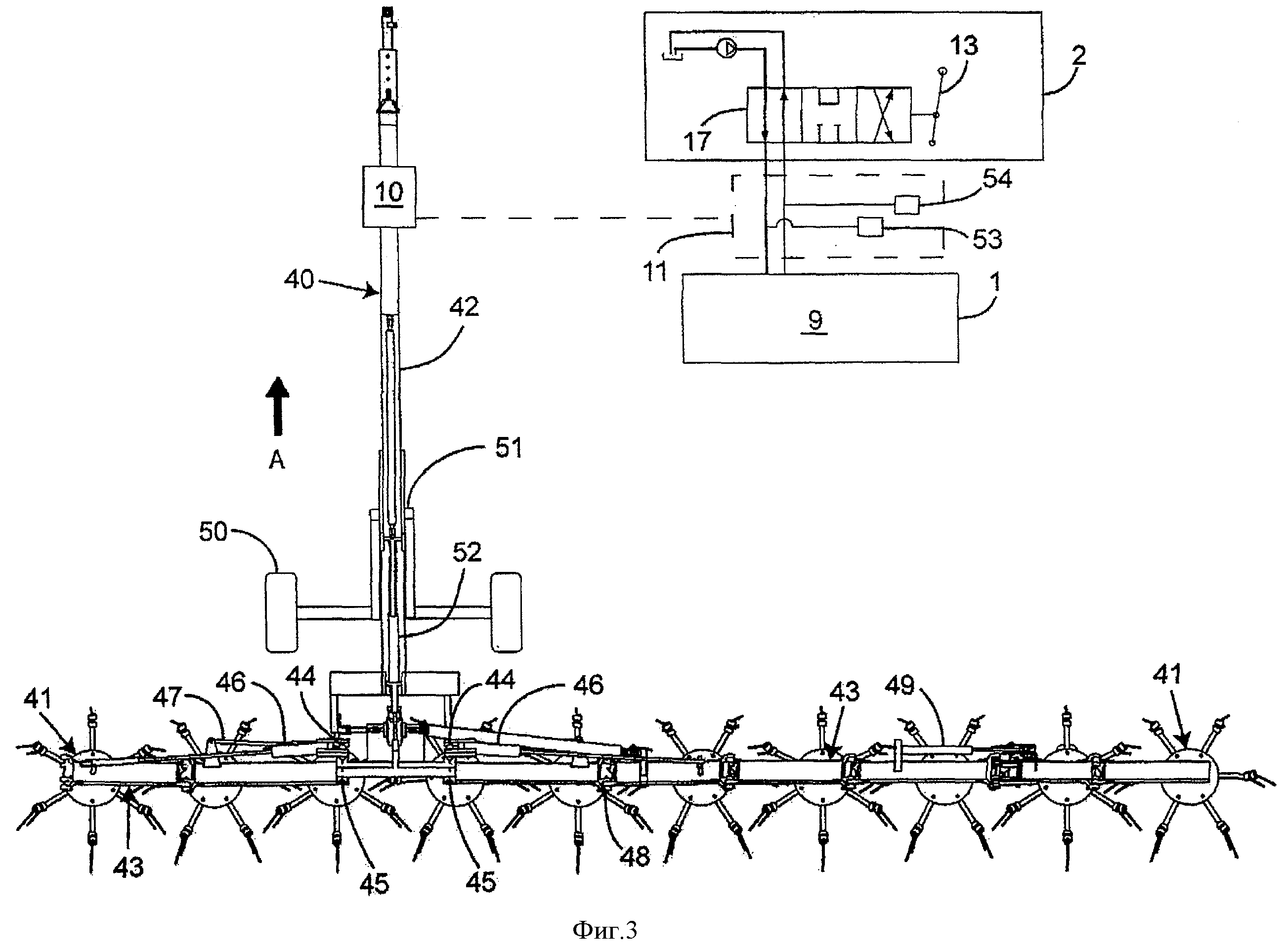
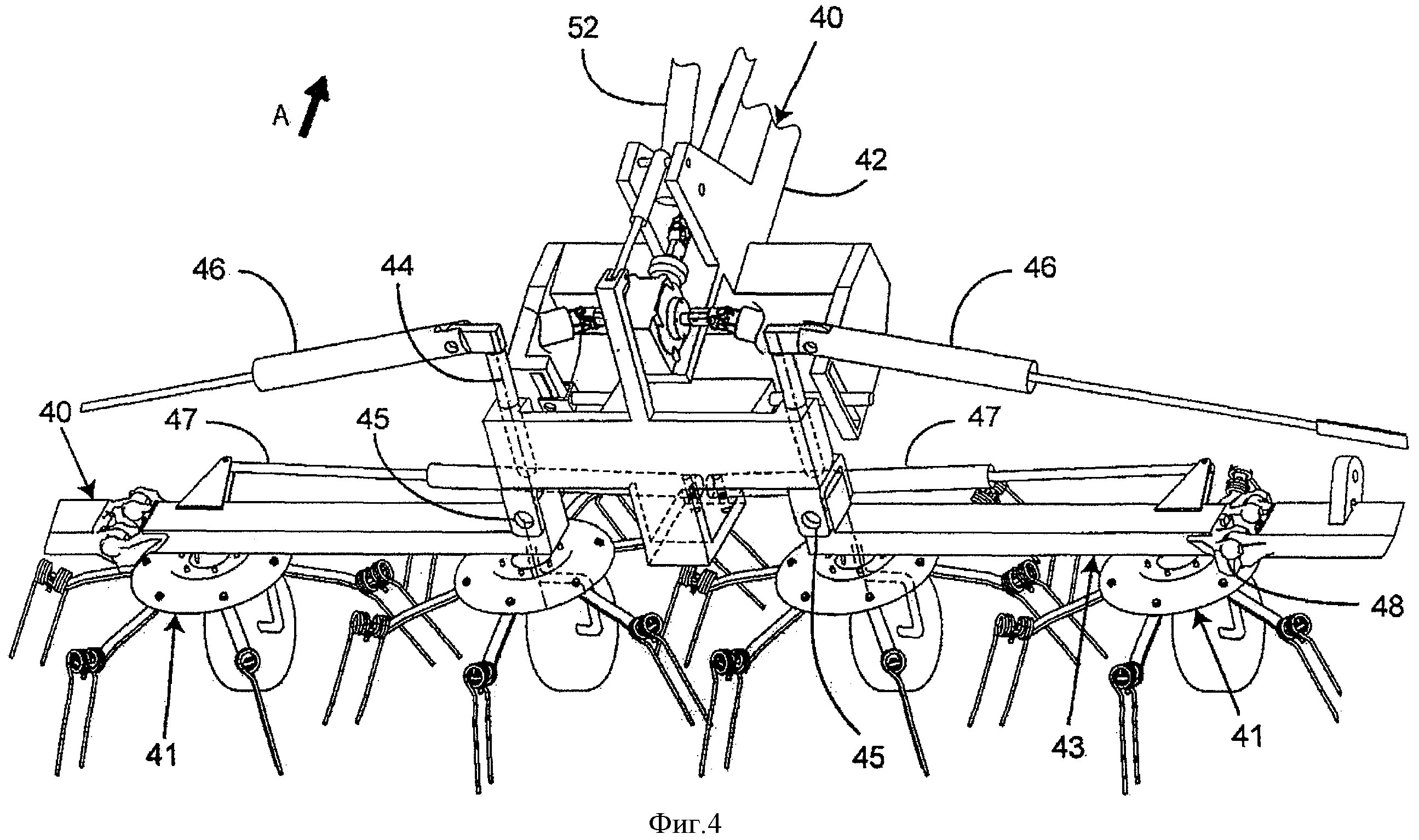
На фиг.3 показана машина для сеноуборочных работ, например, сеноворошилка, содержащая раму 40, которая может быть соединена с трактором, предназначенным для приведения ее в действие и перемещения в направлении движения А. На фиг.3 представлен частичный вид сверху. На раме 40 установлено несколько роторов 41 для ворошения сена, выполненных с возможностью занимать рабочее положение, в котором они оказываются по существу перпендикулярными к направлению движения А, и транспортное положение, в котором роторы 41 откидываются к центру машины и вперед для уменьшения ее ширины и высоты. Рама 40 содержит центральную конструкцию 42 и две боковых конструкции 43, на которых установлены роторы 41. На фиг.4 показана часть рамы 40 машины 1. Боковые конструкции 43 шарнирно соединены с центральной конструкцией 42 при помощи по существу вертикальных осей 44. Каждая боковая конструкция 43 содержит по существу горизонтальную шарнирную ось 45, направленную в сторону направления движения А в рабочем положении. Первый гидравлический силовой цилиндр 46 связан с каждой боковой конструкцией 43 для ее перемещения вокруг соответствующей шарнирной оси 45. Второй гидравлический силовой цилиндр 47 связан с каждой боковой конструкцией 43 для ее перемещения вокруг по существу вертикальной оси 44. Как известно, каждая боковая конструкция 43 содержит внутренний участок с двумя установленными на нем роторами 41 и пять боковых участков, на каждом из которых установлен один ротор 41. Число боковых участков может меняться в зависимости от требуемой ширины обработки. Участки соединены между собой при помощи шарнирной оси 48, в рабочем положении направленной в сторону направления движения А. Эти шарнирные оси 48 позволяют участкам поворачиваться относительно друг друга, чтобы следовать неровностям почвы. Указанные повороты ограничены упорами, расположенными по обе стороны от шарнирных осей 48.
Каждая боковая конструкция 43 содержит два боковых участка, находящиеся ближе к наружной стороне, которые могут складываться под углом примерно 180° вокруг шарнирной оси 48 предпоследнего бокового участка. Это позволяет убирать наружные боковые участки на соседние участки с целью уменьшения ширины боковых конструкций 43, в частности, для транспортировки. Указанное складывание обеспечивается с каждой стороны при помощи соответствующего третьего гидравлического силового цилиндра 49. Передняя часть центральной конструкции 42 содержит опорные колеса 50, которые катятся по земле во время работы и во время транспортировки. В рабочем положении они поддерживают переднюю часть с целью разгрузки колес роторов 41. В транспортном положении они поддерживают также заднюю часть и боковые конструкции 43. Указанные колеса 50 установлены на стойках, перемещающихся в высоту вокруг оси 51. Четвертый гидравлический силовой цилиндр 52 позволяет поднимать или опускать опорные колеса 50 вокруг оси 51. Более детально эта сеноворошилка описана в документе FR 2890526.
Трактор 2, специальные механизмы 9, в частности, силовые цилиндры 46, 47, 49, 52 машины 1 и система 11 контроля схематично показаны на фиг.3. Силовые цилиндры соединены гидравлическим контуром с гидравлическим источником, содержащим резервуар, насос и, по меньшей мере, один распределитель 17. Такой гидравлический источник, как правило, установлен на тракторе 2, буксирующем машину 1. Он может также частично или полностью входить в состав указанной машины 1. Распределитель 17 может находиться в трех положениях. Рычаг 13 позволяет выбрать одно из этих положений. Система 11 контроля, содержащая два датчика 53 и 54, позволяет определять направление потока масла в контуре. Датчики измеряют давление и/или расход масла на выходе из гидравлического источника. Для вышеописанной сеноворошилки электронный блок 10 содержит программу, с по меньшей мере двумя последовательностями действий, в частности с одной последовательностью действий, связанной с движениями складывания, и с другой последовательностью действий, связанной с движениями раскладывания.
Когда один из датчиков 53 или 54 обнаруживает давление в одном из трубопроводов контура, соответствующая информация поступает в электронный блок 10, который подает команду на соответствующую последовательность действий. На схеме, показанной на фиг.3, пользователь действует на рычаг 13 для подачи команды на раскладывание сеноворошилки. Датчик 53 обнаруживает высокое давление в первом трубопроводе питания. Это запускает серию действий по перемещению элементов сеноворошилки с целью перехода в рабочее положение. Сначала подается питание на вторые силовые цилиндры 47, чтобы они переместили боковые конструкции 43 назад вокруг по существу вертикальных шарнирных осей 44. Затем за подачей питания на первые силовые цилиндры 46 следует подача питания на четвертые силовые цилиндры 52 для поднятия колес 50, так чтобы они опустили боковые конструкции 43 вокруг шарнирных осей 45 до положения, в котором колеса роторов 41 входят в контакт с землей, и для завершения подачи питания на третьи силовые цилиндры 49 с целью раскладывания двух наружных боковых участков. Различные силовые цилиндры оборудованы датчиками конца хода, что позволяет вместе с электронным блоком 10 обеспечивать полное выполнение каждого действия. На уровне шарнирной оси 44 предусмотрен также датчик положения.
Когда пользователь решает перейти в положение транспортировки, он действует на рычаг 13 в другом направлении, и в этот момент другой датчик 54 обнаруживает изменение давления масла, которое остается высоким, и этот датчик 54 выдает данные в электронный блок 10. Это обнаружение приводит под контролем электронного блока 10 к подаче команды на последовательность действий для складывания. В этом случае описанные выше действия происходят в обратном порядке. Электронный блок 10 управляет складыванием двух наружных боковых участков через третьи силовые цилиндры 49, затем подъемом боковых конструкций 43 вокруг по существу горизонтальных шарнирных осей 45 до положения, в котором колеса роторов 41 больше не касаются земли, через первые силовые цилиндры 46. После этого увеличивают клиренс, колеса 50 центральной конструкции 42 опускаются при помощи четвертого гидравлического силового цилиндра 52 и, в конечном счете, перемещают боковые конструкции 43 вперед вокруг по существу вертикальных шарнирных осей 44 при помощи вторых силовых цилиндров 47. В этом положении обе боковые конструкции 43 являются по существу параллельными, при этом общая ширина машины меньше общей ширины в рабочем положении двух роторов 4), находящихся в середине машины. После этого указанные боковые конструкции 43 могут опираться на опоры, выполненные на центральной конструкции 42, и стопориться на этих опорах.
Благодаря системе 11 контроля и управлению электронным блоком 10, различные движения боковых конструкций 43 координируются и происходят одно за другим, независимо от опыта пользователя. Исчезает опасность столкновения между различными роторами 41, боковыми конструкциями 43 и центральной конструкцией 41. Для обеспечения оптимальной безопасности способа управления различные положения наружных боковых участков и боковых конструкций 43 контролируются датчиками положения.
Изобретение можно применять для любой машины, использующей описанный выше способ управления.
Разумеется, изобретение не ограничивается описанными выше и представленными на прилагаемых чертежах вариантами выполнения. В него можно вносить изменения, в частности, изменять состав или число различных элементов или заменять их на технические эквиваленты, не выходя при этом за объем формулы изобретения.
Машина может быть навесной, буксируемой или полунавесной.
Реферат
Способ включает осуществляемое действие или последовательность действий указанной машины, которую запускают автоматически через контроль электронного блока путем обнаружения изменения состояния одного из средств управления трактором посредством системы контроля. Система контроля направляет информацию в указанный электронный блок. Сельскохозяйственная машина содержит электронный блок и соединена с трактором. Трактор содержит по меньшей мере одно средство управления. Действие или последовательность действий машины осуществляют вышеприведенным способом. Группа изобретений позволит обеспечить возможность управления машиной, соединенной с трактором любого типа, а также обеспечить обнаружение изменений состояния средств управления машиной. 2 н. и 8 з.п. ф-лы, 4 ил.
Комментарии