Устройство мониторинга напряжения аккумулятора - RU2484491C1
Код документа: RU2484491C1
Чертежи
Описание
Область техники
Данное изобретение относится к устройству мониторинга для множества аккумуляторных модулей, каждый из которых содержит множество единичных элементов.
Предшествующий уровень техники
В патентном документе JP2003-070179A, опубликованном патентным бюро Японии в 2003 году, предлагается устройство мониторинга, которое детектирует напряжение каждого единичного элемента во множестве аккумуляторных модулей, каждый из которых содержит множество единичных элементов.
Устройство мониторинга содержит интегральные схемы (IC), каждая из которых детектирует напряжения единичных элементов в каждом из аккумуляторных модулей. Эти интегральные схемы подключаются к контроллеру через так называемую схему каскадного соединения, и информация, выводимая из каждой интегральной схемы, обрабатывается в контроллере. Устройство мониторинга содержит схему детектирования полного выходного напряжения для детектирования полного выходного напряжения аккумуляторных модулей и сконфигурировано с возможностью определять состояние аккумуляторных модулей посредством процесса сравнения данных, полученных из интегральных схем, и данных, полученных из схемы детектирования полного выходного напряжения.
Поскольку устройство мониторинга согласно предшествующему уровню техники подключает интегральные схемы к контроллеру через схему каскадного соединения, сигнал команды управления детектирования напряжения, выводимый из контроллера, передается в первую интегральную схему, которая находится ближе всего к входному концу в схеме каскадного соединения.
Когда первая интегральная схема принимает сигнал команды управления детектирования напряжения, она сразу детектирует напряжения единичных элементов, подключенных к интегральной схеме, и выводит детектированные значения напряжения вместе с сигналом команды управления детектирования напряжения во вторую интегральную схему, расположенную рядом с первой интегральной схемой, через схему каскадного соединения. Вторая интегральная схема работает аналогично первой интегральной схеме и выводит детектированные значения напряжения вместе с сигналом команды управления детектирования напряжения в третью интегральную схему, расположенную рядом со второй интегральной схемой, через схему каскадного соединения.
Как результат этой системы связи, большая величина запаздывания во времени возникает в моменты времени детектирования напряжения единичных элементов посредством интегральных схем. Если детектированные напряжения обрабатываются как детектированные в идентичное время, то, следовательно, точность при детектировании напряжения единичных элементов снижается.
Краткое изложение существа изобретения
Задачей настоящего изобретения является снижение запаздывания во времени для моментов времени детектирования выходных напряжений единичных элементов аккумуляторных модулей, которые соединены через схему каскадного соединения.
Для решения вышеуказанной задачи изобретение предоставляет устройство мониторинга напряжения аккумулятора для мониторинга выходного напряжения единичного элемента или единичных элементов в каждом из аккумуляторных модулей, которые соединены последовательно, содержащее интегральные схемы, каждая из которых дискретизирует и запоминает выходное напряжение единичного элемента или единичных элементов в каждом из аккумуляторных модулей, схему каскадной связи, которая соединяет интегральные схемы последовательно, чтобы передавать сигналы в интегральные схемы согласно порядку соединения интегральных схем, и программируемый контроллер, подключенный к интегральной схеме, расположенной на входном конце схемы каскадной связи, и интегральной схеме, расположенной на выходном конце схемы каскадной связи относительно передачи сигналов.
Контроллер запрограммирован с возможностью выводить сигнал команды управления для дискретизации и запоминания напряжения в интегральную схему на входном конце так, что сигнал команды управления для дискретизации и запоминания напряжения передается в каждую из интегральных схем через схему каскадной связи, причем сигнал команды управления для дискретизации и запоминания напряжения управляет каждой из интегральных схем для дискретизирования и запоминания выходного напряжения единичного элемента или единичных элементов в каждом из аккумуляторных модулей и выводить сигнал команды управления передачей в интегральную схему на входном конце так, что сигнал команды управления передачей передается через схему каскадной связи в каждую из интегральных схем после передачи сигнала команды управления для дискретизации и запоминания напряжения, причем сигнал команды управления передачей управляет каждой из интегральных схем для передачи выходного напряжения, запомненного посредством каждой из интегральных схем, в контроллер через схему каскадной связи.
Подробности, а также другие признаки и преимущества этого изобретения изложены далее в подробном описании и показаны на прилагаемых чертежах.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает принципиальную электрическую схему устройства мониторинга напряжения аккумулятора согласно изобретению;
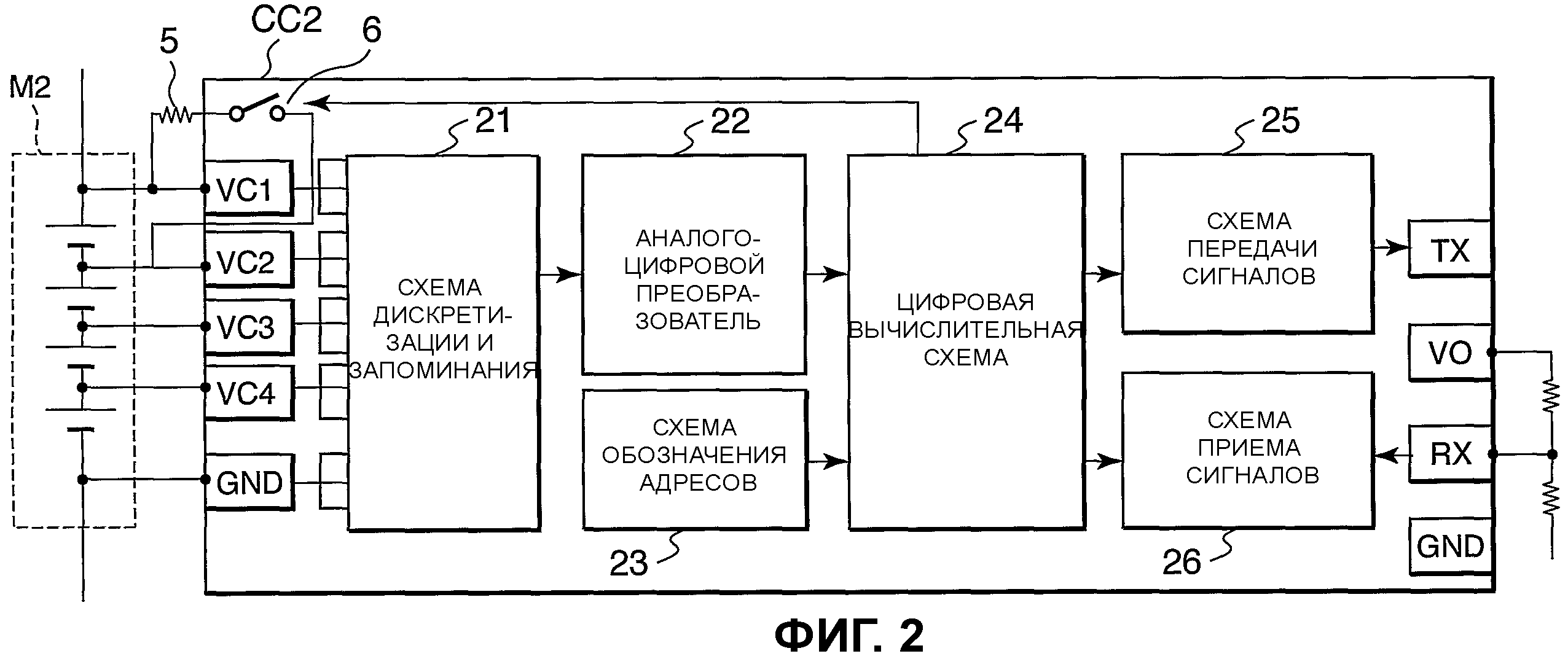
фиг.2 изображает блок-схему интегральной схемы CC2 согласно изобретению;
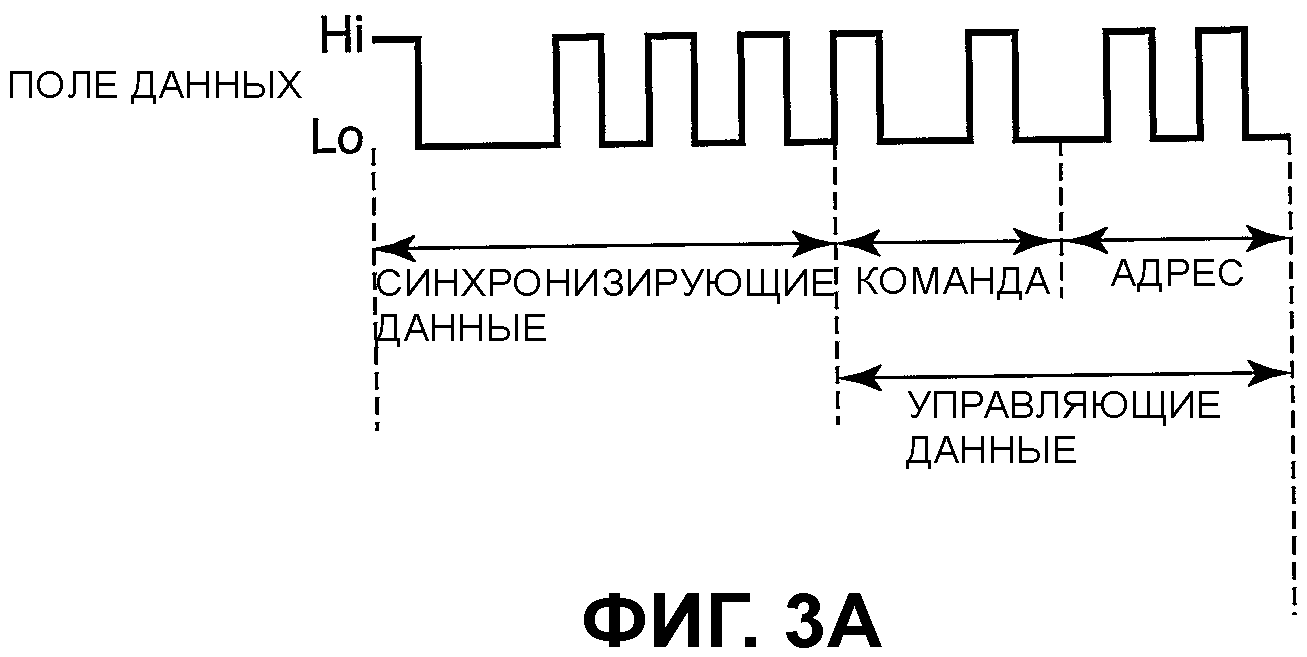
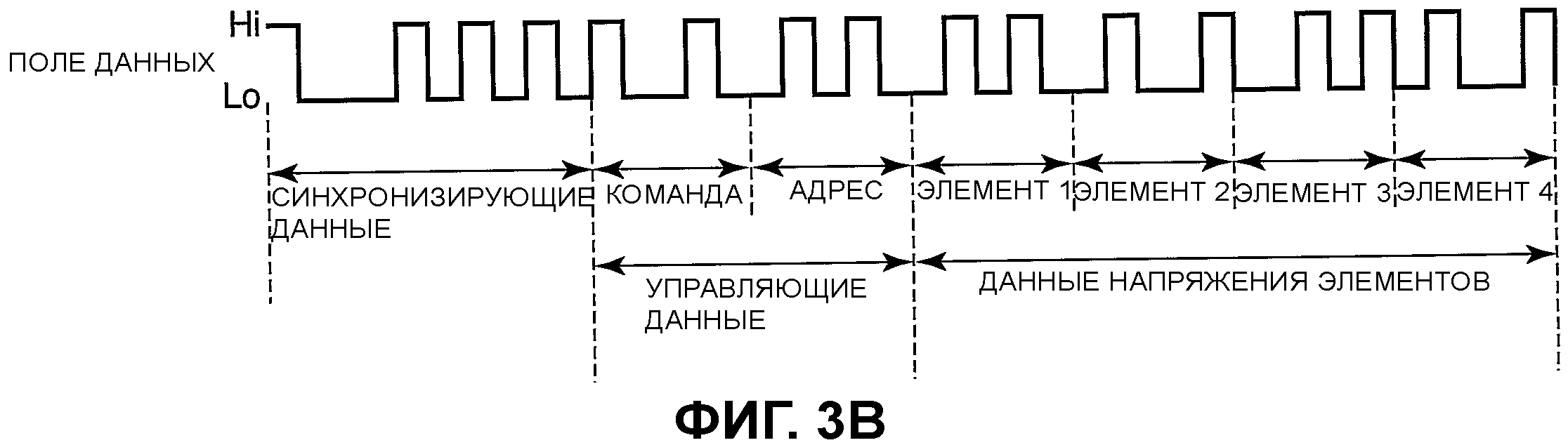
фиг.3A и 3B изображают временные диаграммы, показывающие структуру данных, передаваемых из аккумуляторного контроллера в интегральную схему CC3, и структуру данных, передаваемых из интегральной схемы CC3 в интегральную схему CC2, согласно изобретению;
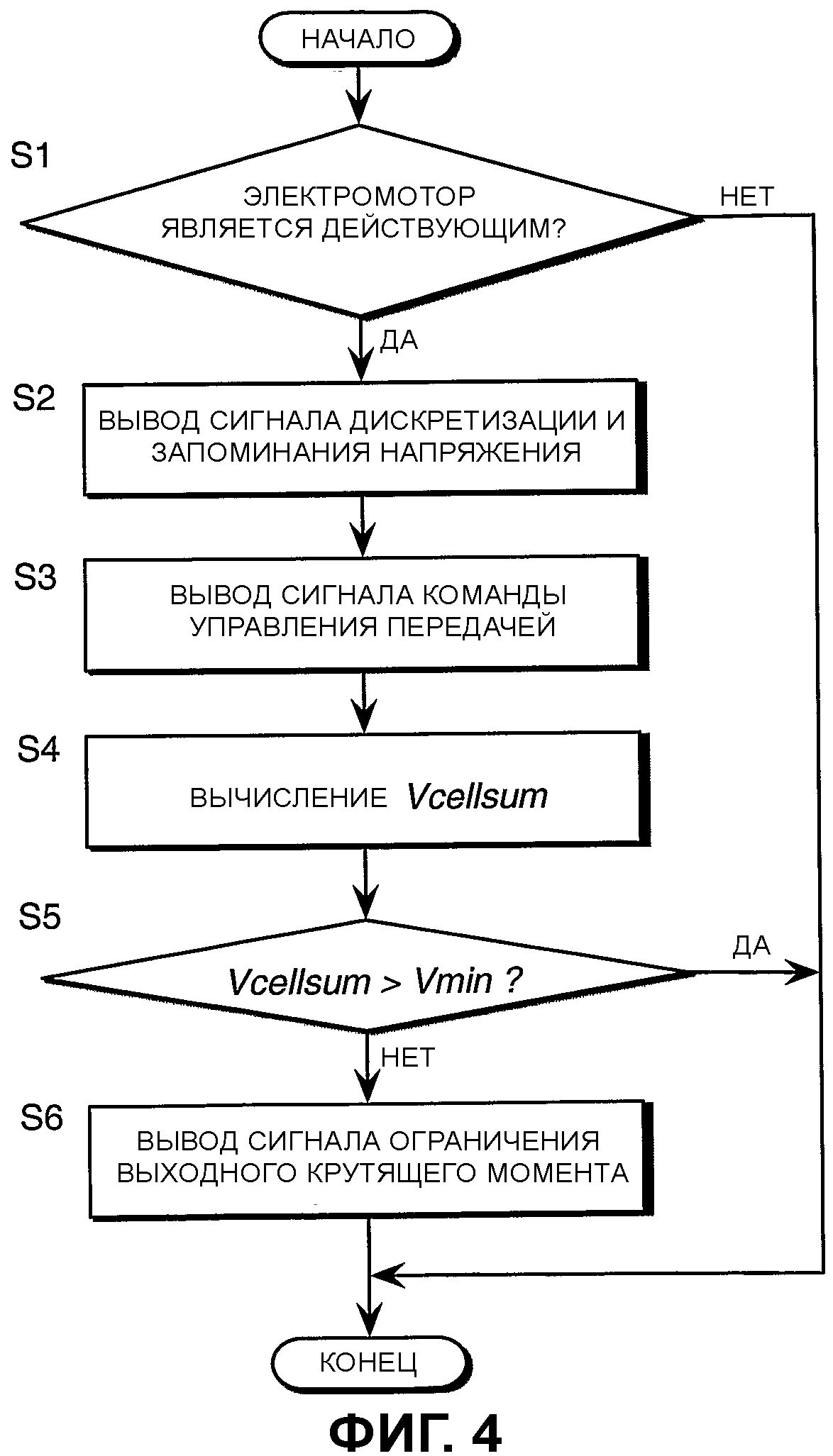
фиг.4 изображает блок-схему последовательности операций способа, описывающую процедуру для детектирования выходного напряжения группы аккумуляторов, выполняемой посредством аккумуляторного контроллера, согласно изобретению;
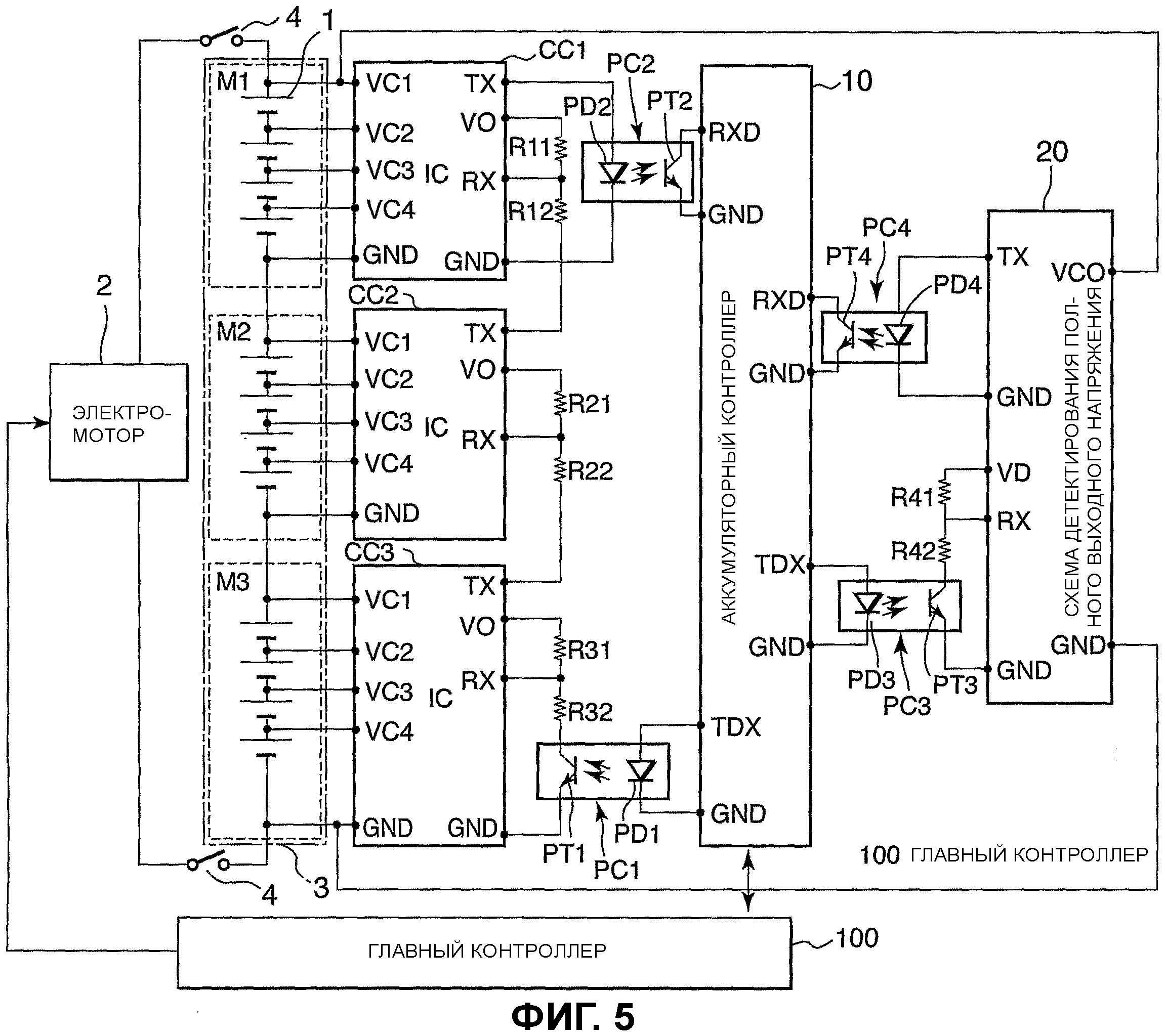
фиг.5 изображает принципиальную электрическую схему устройства мониторинга напряжения аккумулятора согласно второму варианту осуществления изобретения;
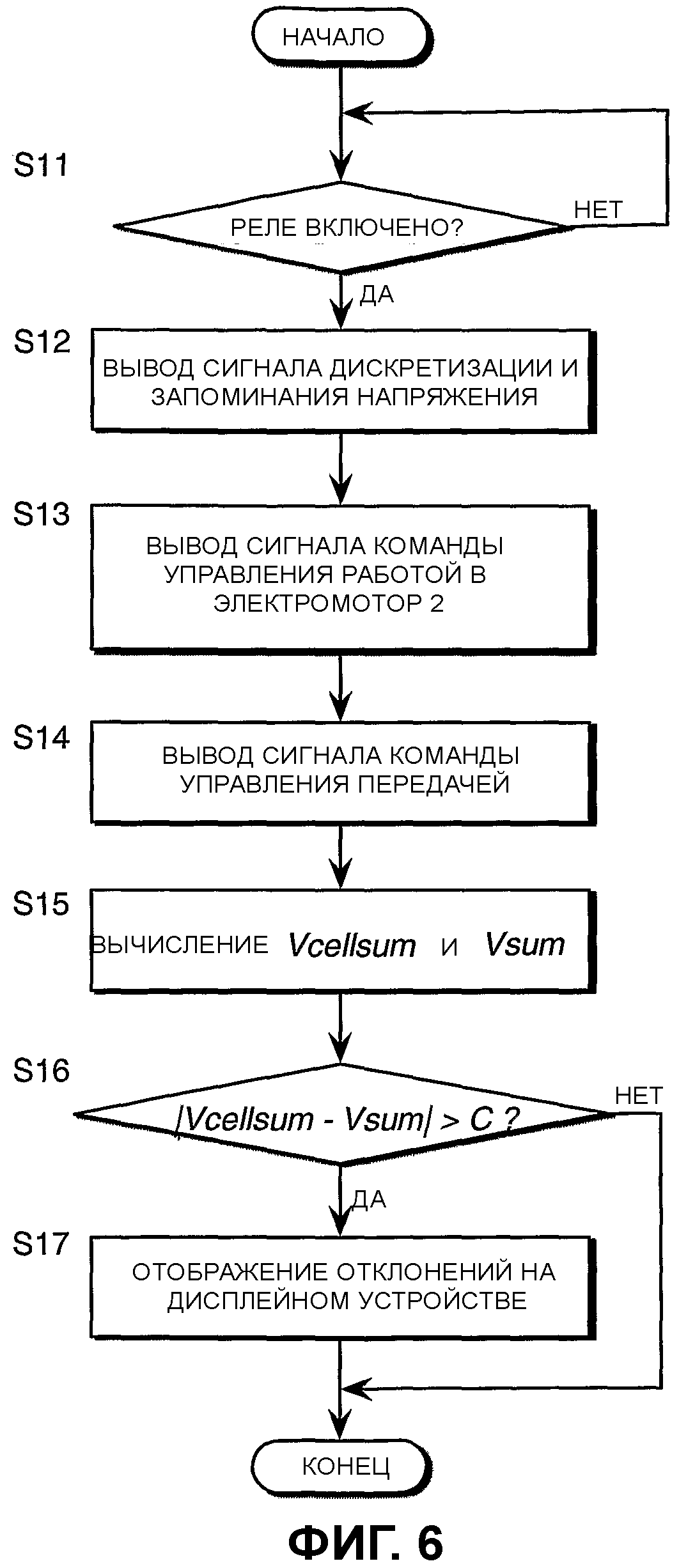
фиг.6 изображает блок-схему последовательности операций способа, описывающую процедуру детектирования отклонений относительно интегральных схем, выполняемую посредством аккумуляторного контроллера, согласно второму варианту осуществления изобретения;
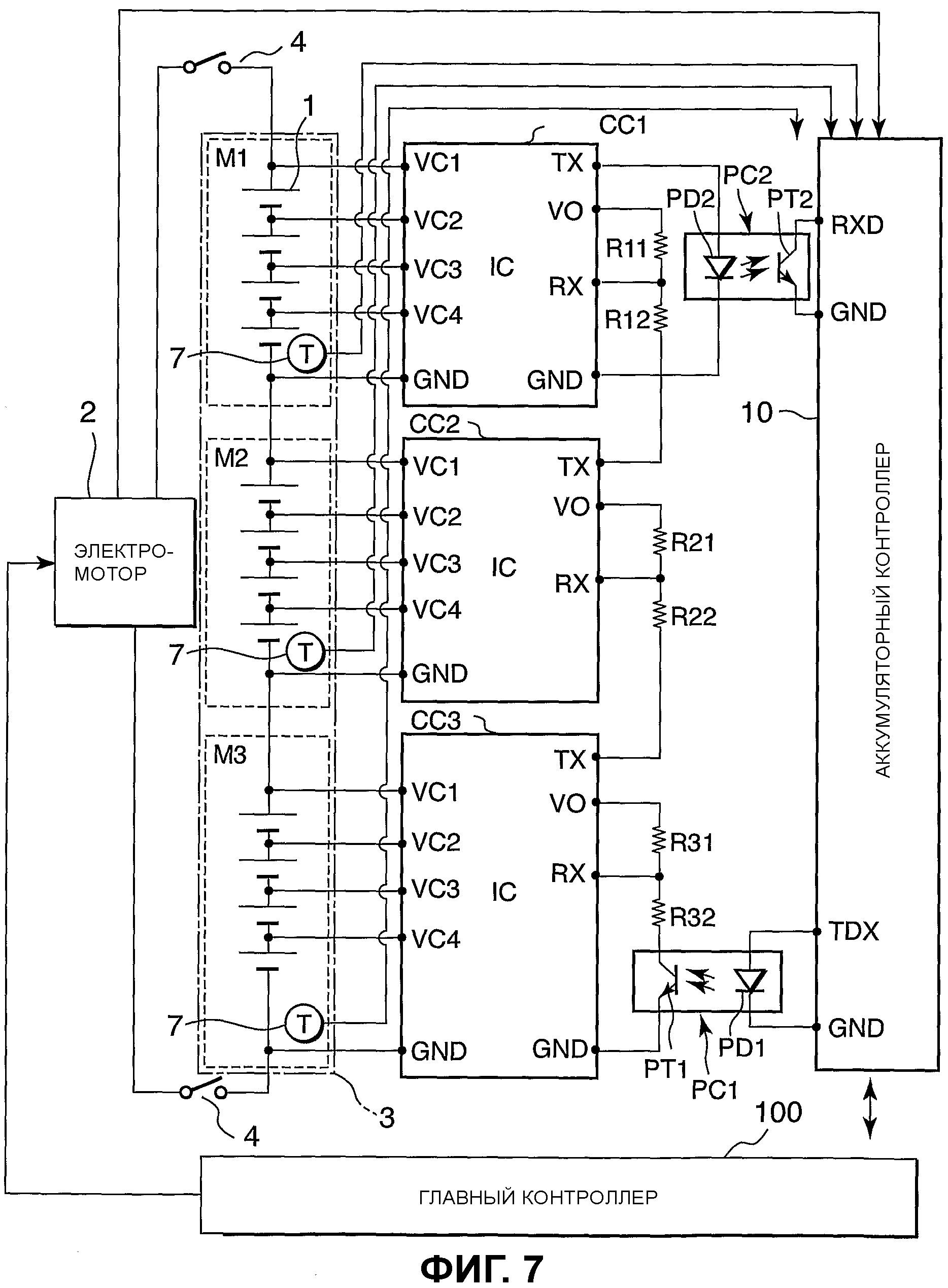
фиг.7 изображает принципиальную электрическую схему устройства мониторинга напряжения аккумулятора согласно третьему варианту осуществления изобретения;
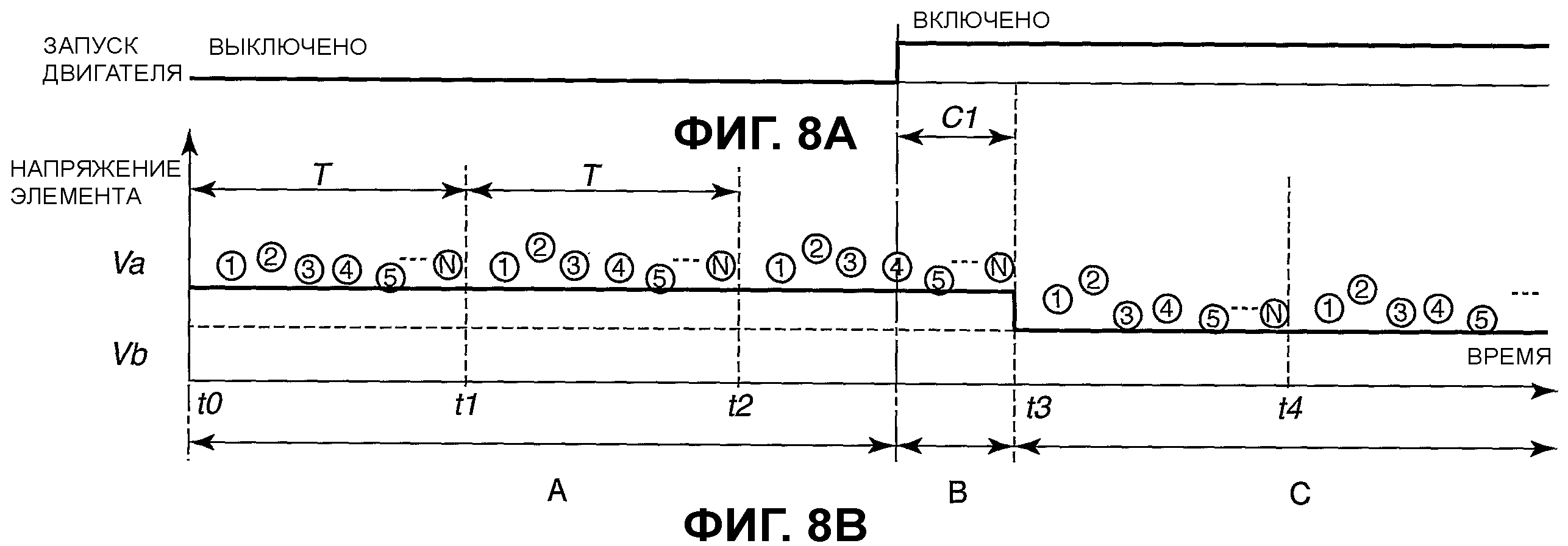
фиг.8A и 8B изображают временные диаграммы, показывающие входные моменты времени значений выходного напряжения единичных элементов в аккумуляторный контроллер, согласно третьему варианту осуществления изобретения в течение периода времени в пределах начала запуска двигателя внутреннего сгорания;
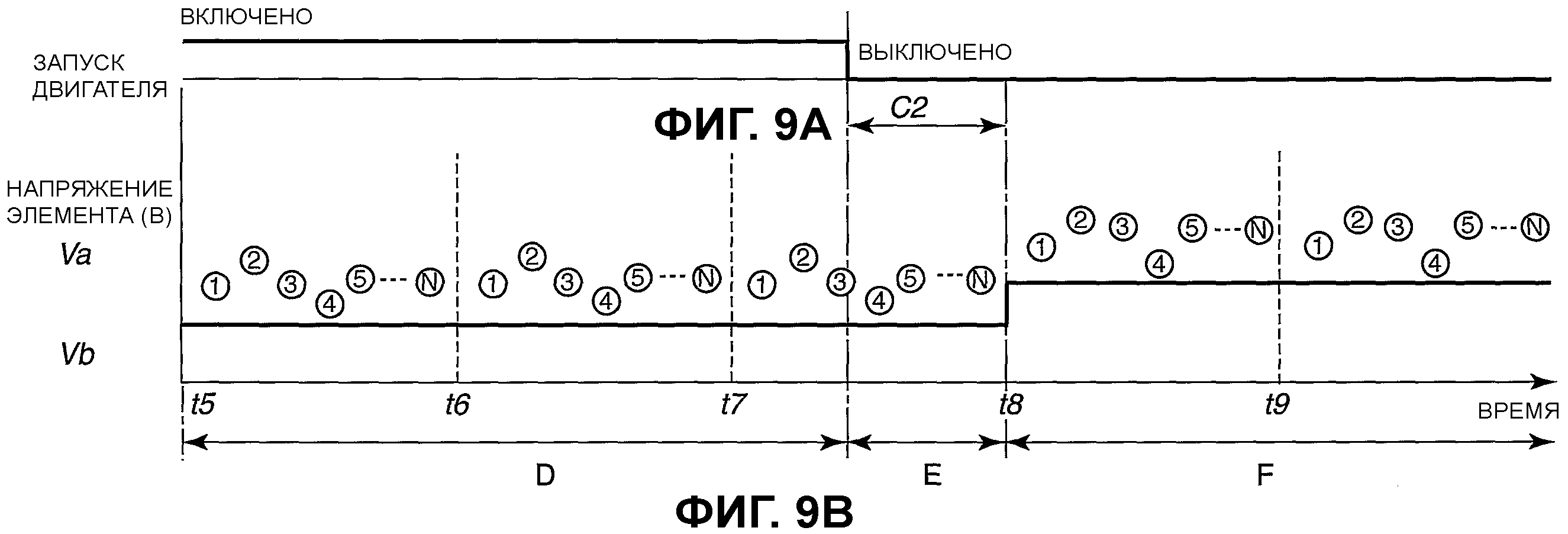
фиг.9A и 9B изображают временные диаграммы, показывающие входные моменты времени выходных напряжений единичных элементов в аккумуляторный контроллер, согласно третьему варианту осуществления изобретения, в течение периода времени в пределах завершения запуска двигателя внутреннего сгорания;
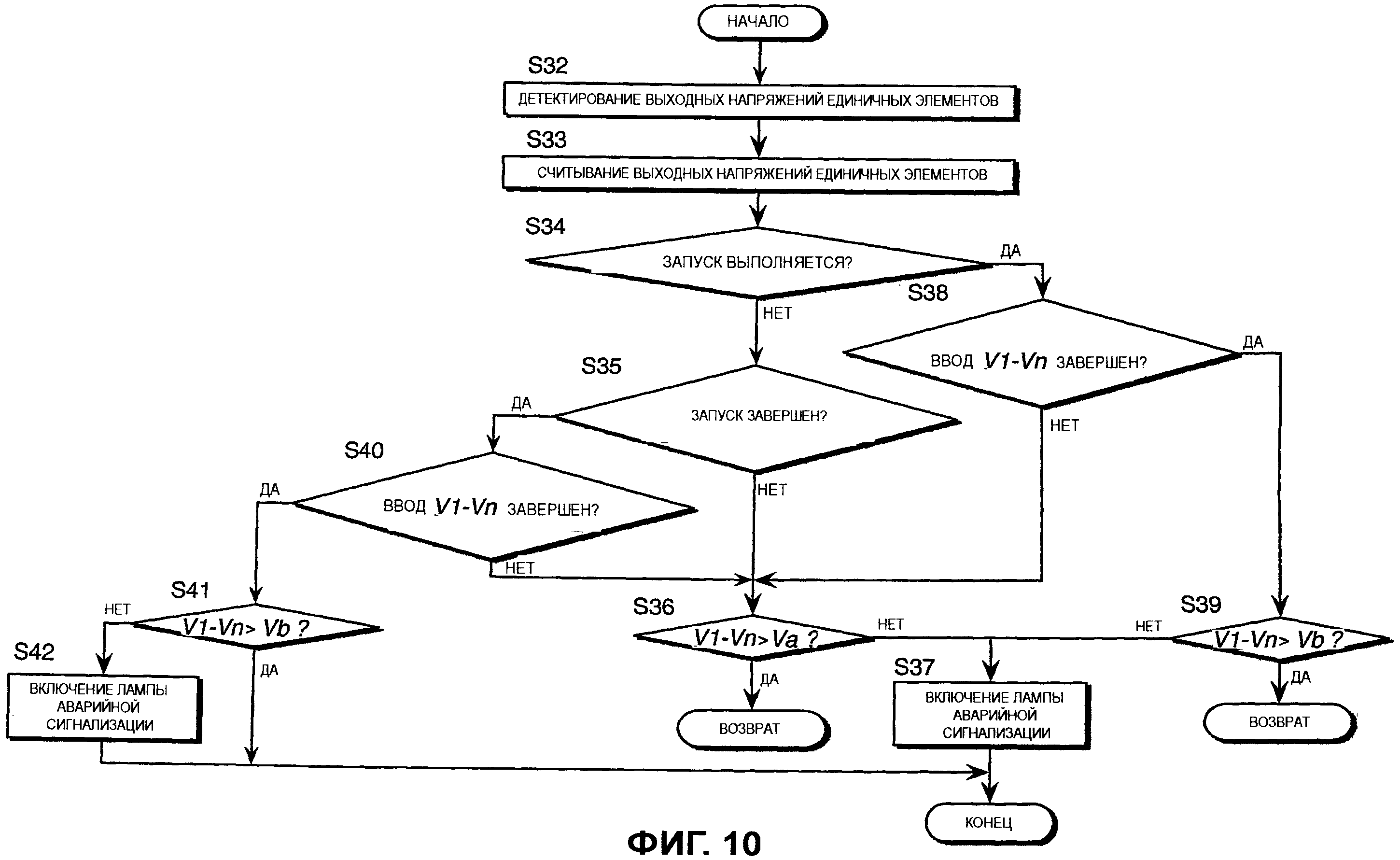
фиг.10 изображает блок-схему последовательности операций способа, описывающую процедуру детектирования отклонений единичных элементов, выполняемую посредством аккумуляторного контроллера, согласно третьему варианту осуществления изобретения;
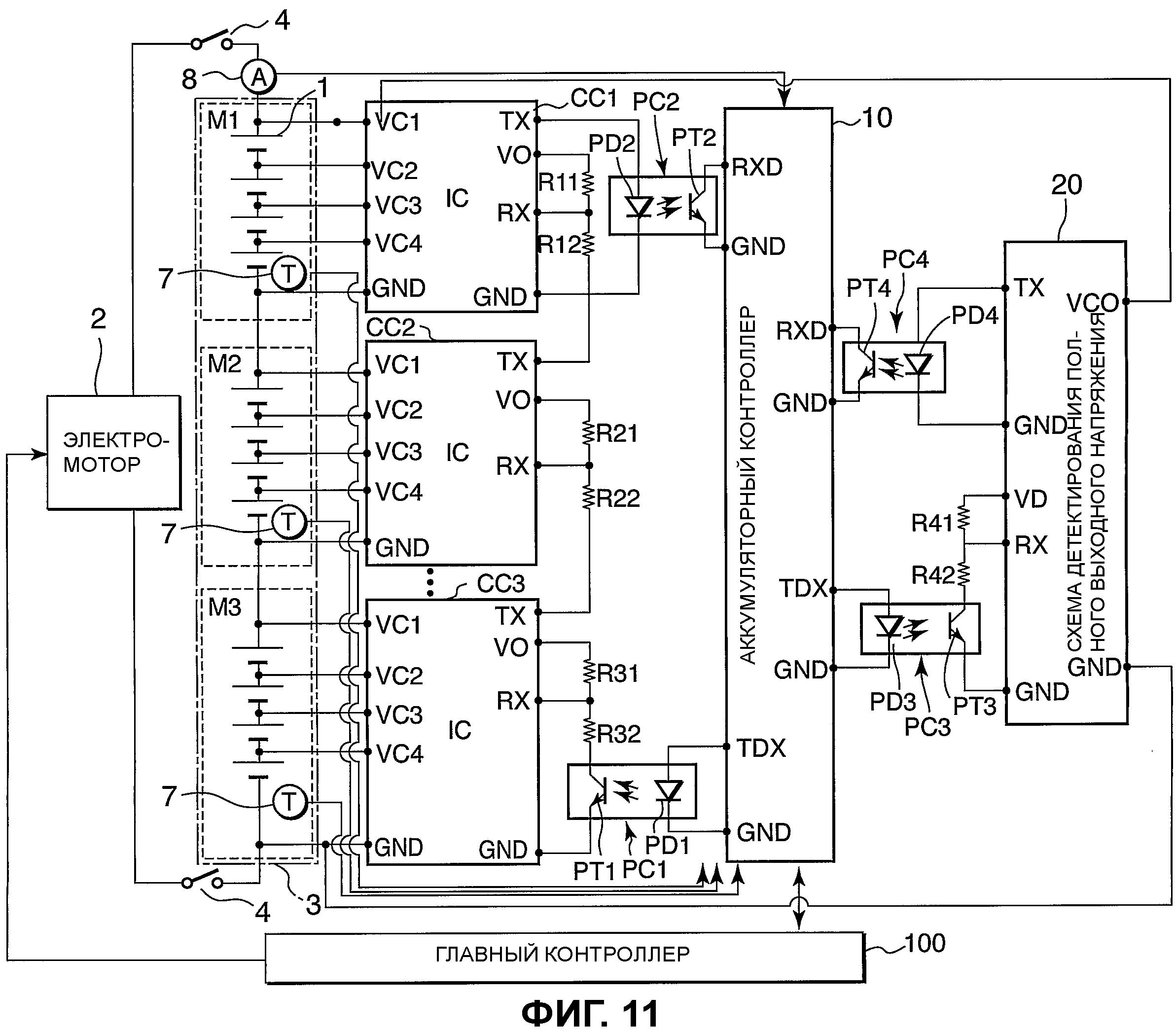
фиг.11 изображает принципиальную электрическую схему устройства мониторинга напряжения аккумулятора, согласно четвертому варианту осуществления изобретения;
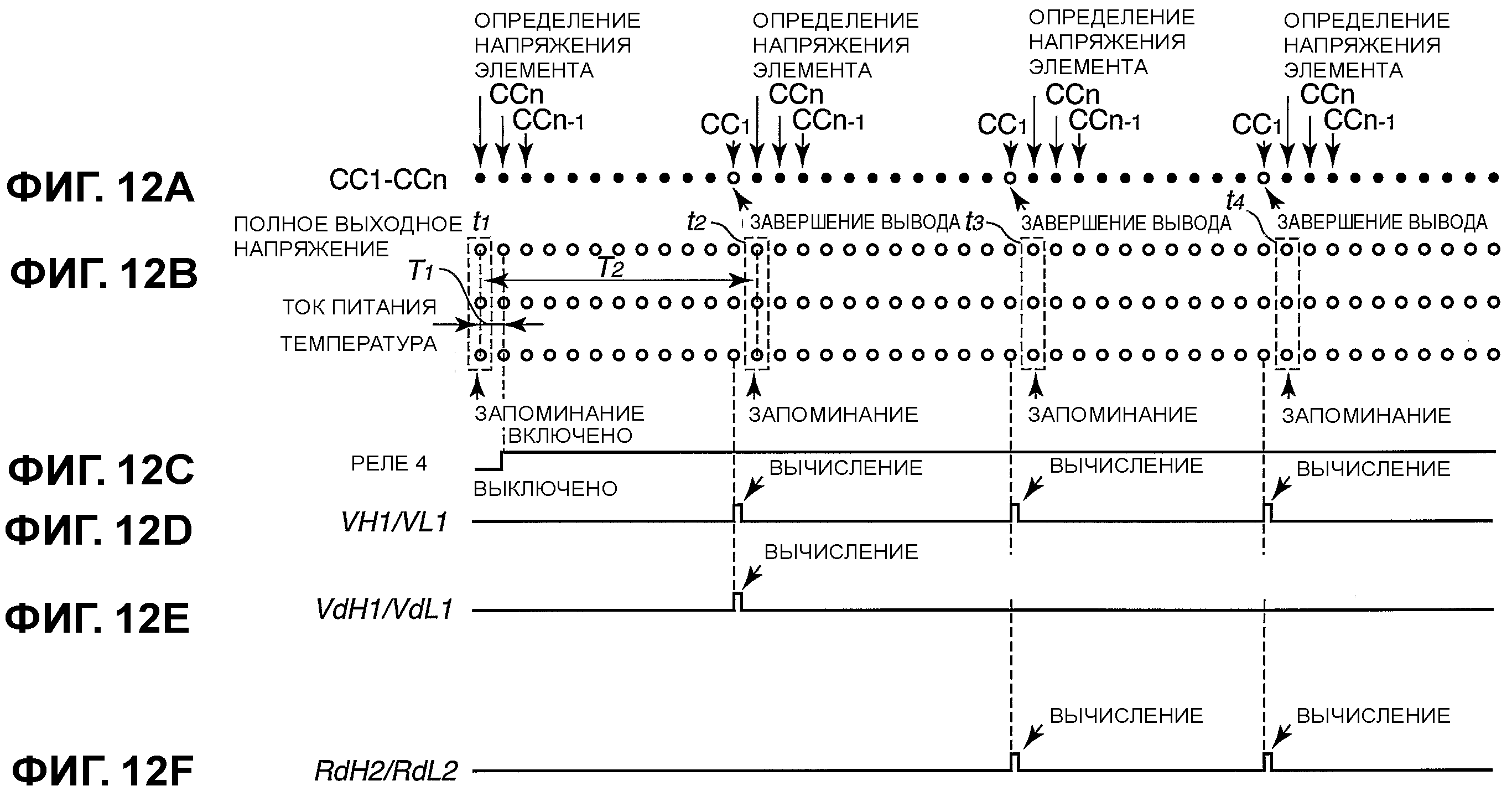
фиг.12A-12F изображают временные диаграммы, показывающие обработку данных, выполняемую посредством устройства мониторинга напряжения аккумулятора, согласно четвертому варианту осуществления изобретения.
Описание предпочтительных вариантов осуществления изобретения
Ссылаясь на фиг.1, группа 3 аккумуляторов, выступающая в качестве источника энергии, расходуемой на движение, для электромобиля с гибридным приводом или электромобиля содержат три аккумуляторных модуля M1, M2, M3, электрически подключенные последовательно. Каждый аккумуляторный модуль M1, M2, M3 содержит четыре единичных элемента 1.
Устройство мониторинга напряжения аккумулятора согласно этому изобретению детектирует выходные напряжения четырех единичных элементов 1 соответствующих аккумуляторных модулей M1, M2, M3. Устройство мониторинга содержит три интегральных схемы (IC) CC1, CC2, CC3 для этих целей.
Электромотор 2 для приведения в движение транспортного средства подключается в качестве электрической нагрузки к электрическим концам группы 3 аккумуляторов через устройство преобразования мощности, к примеру, инвертор. Реле 4 для включения и выключения основного источника питания электромотора 2 размещается между группой 3 аккумуляторов и электромотором 2.
Электрическая зарядка группы 3 аккумуляторов выполняется с использованием электромотора 2 в качестве генератора или с использованием независимого генератора (не показан). Когда группа 3 аккумуляторов заряжается, величины заряда единичных элементов 1 могут демонстрировать расхождение вследствие индивидуальных различий единичных элементов 1, сформированных в процессе изготовления.
Ссылаясь на фиг.2, аккумуляторный контроллер 10 выводит сигнал команды управления в интегральные схемы CC1-CC3 согласно детектированным напряжениям единичных элементов 1 и понижает выходное напряжение единичного элемента 1, демонстрирующего высокую величину заряда, посредством замыкания переключающего элемента 6 в интегральных схемах CC1-CC3, чтобы предоставлять питание из единичного элемента 1 в регулировочный резистор 5 величины заряда. Регулировочный резистор 5 величины заряда и переключающий элемент 6 формируют модуль снижения напряжения.
Фиг.2 показывает пару из регулировочного резистора 5 величины заряда и переключающего элемента 6 относительно только одного единичного элемента 1. На фиг.1 регулировочный резистор 5 величины заряда и переключающий элемент 6 не показаны. Следует отметить, тем не менее, то, что модуль снижения напряжения, содержащий регулировочный резистор 5 величины заряда и переключающий элемент 6, предоставляется для каждого единичного элемента 1 в аккумуляторных модулях M1, M2, M3.
Сигналы, связанные с выходным напряжением группы 3 аккумуляторов, вводятся в аккумуляторный контроллер 10. Транспортное средство содержит главный контроллер 100, который управляет выходным крутящим моментом электромотора 2 через инвертор на основе сигналов, вводимых в аккумуляторный контроллер 10 относительно выходного напряжения группы 3 аккумуляторов.
Когда выходное напряжение группы 3 аккумуляторов становится низким, главный контроллер 100 ограничивает выходной крутящий момент электромотора 2 через инвертор, тем самым не допуская чрезмерной разрядки группы 3 аккумуляторов. Когда группа 3 аккумуляторов предоставляет питание в другую электрическую нагрузку в дополнение к электромотору 2, главный контроллер 100 ограничивает потребляемую мощность всех электрических нагрузок.
Главный контроллер 100 и аккумуляторный контроллер 10 состоят, соответственно, из микрокомпьютера, содержащего центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс ввода-вывода. Главный контроллер 100 и аккумуляторный контроллер 10 могут состоять из одного микрокомпьютера либо один или оба из главного контроллера 100 и аккумуляторного контроллера 10 могут состоять из нескольких микрокомпьютеров.
Снова ссылаясь на фиг.2, описывается структура интегральной схемы CC2. Структура интегральных схем CC1 и CC3 является идентичной структуре интегральной схемы CC2.
Интегральная схема CC2 содержит входные контактные выводы VC1, VC2, VC3, VC4 для напряжения, в которые вводится выходное напряжение каждого из четырех единичных элементов 1, составляющих аккумуляторный модуль M2, и заземляющий хомут GRD. Интегральная схема CC2 дополнительно содержит выходной контактный вывод TX для связи, контактный вывод VO подачи питания для связи, входной контактный вывод RX для связи и заземляющий хомут GRD, спаренный с контактным выводом VO подачи питания для связи.
Входной контактный вывод RX для связи подключается к выходному контактному выводу TX для связи смежной интегральной схемы CC1. Выходной контактный вывод TX для связи подключается к входному контактному выводу RX для связи другой смежной интегральной схемы CC3. Контактный вывод VO подачи питания для связи и спаренный заземляющий хомут GRD являются контактными выводами для подачи электроэнергии, требуемой для входного контактного вывода RX для связи, чтобы принимать сигналы, выводимые из выходного контактного вывода TX для связи интегральной схемы CC1.
Интегральная схема CC2 дополнительно содержит схему 21 дискретизации и запоминания, аналого-цифровой преобразователь 22, схему 23 обозначения адресов, цифровую вычислительную схему 24, схему 25 передачи сигналов и схему 26 приема сигналов, чтобы обрабатывать сигналы, вводимые в контактные выводы RX, TX и VC1-VC4.
Снова ссылаясь на фиг.1, сигналы вводятся на входной контактный вывод RX для связи интегральной схемы CC3, расположенной на стороне отрицательного электрода группы 3 аккумуляторов, из выходного контактного вывода TDX, который содержит аккумуляторный контроллер 10, через оптрон PC1. Сигналы, выводимые из выходного контактного вывода TX для связи интегральной схемы CC1, расположенной на стороне положительного электрода группы 3 аккумуляторов, вводятся на входной контактный вывод RDX, который содержит группу 3 аккумуляторов, через оптрон PC2.
Причина, по которой интегральные схемы CC1, CC3 и аккумуляторный контроллер 10 соединяются не через обычный кабель связи, а через оптроны PC2, PC1, заключается в следующем. В частности, интегральные схемы CC1-CC3 подключаются к аккумуляторным модулям M1-M3 высокого напряжения, и, следовательно, аккумуляторный контроллер 10 и интегральные схемы CC1-CC3 должны быть электрически отделены друг от друга так, что они защищают аккумуляторный контроллер 10 от тока высокого напряжения.
Оптрон PC1 содержит фотодиод PD1, который состоит из светоизлучающего элемента и формирует оптический сигнал, соответствующий электрическому сигналу, вводимому в него, и фототранзистор, который состоит из светочувствительного элемента и формирует электрический сигнал, соответствующий оптическому сигналу, вводимому в него. Фотодиод PD1 подключается к выходному контактному выводу TDX аккумуляторного контроллера 10 и выводит оптический сигнал, соответствующий сигналу команды управления, выводимому из аккумуляторного контроллера 10. При приеме оптического сигнала фототранзистор PT1 преобразует оптический сигнал в электрический сигнал и вводит его на входной контактный вывод RX для связи интегральной схемы CC3. Электроэнергия, требуемая для работы фотодиода PD1, подается из аккумуляторного контроллера 10, и электроэнергия, требуемая для работы фототранзистора PT1, подается из интегральной схемы CC3.
Оптрон PC2 содержит фотодиод PD2 и фототранзистор PT2. Фотодиод PD2 подключается к выходному контактному выводу TX для связи интегральной схемы CC1. Фототранзистор PT2 подключается к входному контактному выводу RXD аккумуляторного контроллера 10. Электроэнергия, требуемая для работы фотодиода PD2, подается из аккумуляторного контроллера 10. Электроэнергия, требуемая для работы фототранзистора PT2, подается из интегральной схемы CC1.
Интегральные схемы CC1, CC2, CC3 тем самым подключаются к аккумуляторному контроллеру 10 через так называемую схему каскадного соединения. Посредством приспособления схемы каскадной связи число дорогих оптронов PC1 и PC2 может сокращаться по сравнению со случаем, в котором каждая из интегральных схем CC1, CC2, CC3 имеет независимое соединение с аккумуляторным контроллером 10.
Резисторы R11, R12, R21, R22, R31 и R32 требуются для интегральных схем CC1-CC3, чтобы обмениваться данными с аккумуляторным контроллером 10 или друг с другом через схему каскадной связи.
Снова ссылаясь на фиг.2, схема 21 дискретизации и запоминания сохраняет значения выходных напряжений, вводимые на входные контактные выводы VC1-VC4 для напряжения, в качестве аналоговых сигналов. Аналого-цифровой преобразователь 22 преобразует значения выходного напряжения единичных элементов 1, сохраненные в схеме 21 дискретизации и запоминания, в цифровые значения. Схема 23 обозначения адресов сохраняет внутренний адрес, назначаемый интегральной схеме CC2.
Схема 26 приема сигналов принимает сигналы, подаваемые на входной контактный вывод RX для связи.
Цифровая вычислительная схема 24 идентифицирует сигналы, принятые посредством схемы 26 приема сигналов, посредством обращения к внутреннему адресу, сохраненному в схеме 23 обозначения адресов, и выполняет различные виды обработки в соответствии с результатом идентификации.
В частности, цифровая вычислительная схема 24 идентифицирует сигнал команды управления для дискретизации и запоминания напряжения, направляемый в интегральную схему CC2, из числа сигналов, принятых посредством схемы 26 приема сигналов. Цифровая вычислительная схема 24 затем сохраняет выходные напряжения единичных элементов 1 аккумуляторного модуля M2, которые аналого-цифровой преобразователь 22 преобразует в цифровые значения, в своем внутреннем запоминающем устройстве в ответ на идентифицированный сигнал команды управления для дискретизации и запоминания напряжения.
Цифровая вычислительная схема 24 также идентифицирует сигнал команды управления передачей, направляемый в интегральную схему CC2, из числа сигналов, принятых посредством схемы 26 приема сигналов. Цифровая вычислительная схема 24 затем передает значения выходного напряжения единичных элементов 1, сохраненные в запоминающем устройстве, на выходной контактный вывод TX для связи через передающую схему 25.
Цифровая вычислительная схема 24 дополнительно идентифицирует сигнал размыкания/замыкания переключающего элемента 6 для конкретного единичного элемента 1 аккумуляторного модуля M2 и затем выводит соответствующий сигнал команды управления в переключающий элемент 6.
Цифровая вычислительная схема 24 передает сигналы, принятые посредством приемной схемы 26, на выходной контактный вывод TX для связи через передающую схему 25 независимо от вышеуказанных идентификаций.
Снова ссылаясь на фиг.1, устройство мониторинга напряжения аккумулятора содержит интегральные схемы CC1-CC3, состоящие из таких элементов и подключенные последовательно через схему каскадной связи к аккумуляторному контроллеру 10. Аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения единичных элементов 1 из выходного контактного вывода TDX в предварительно определенное время. Аккумуляторный контроллер 10 также обрабатывает сигналы, вводимые на входной контактный вывод RXD.
Далее описывается процесс предшествующего уровня техники для детектирования выходных напряжений единичных элементов 1 аккумуляторных модулей M1-M3.
Прежде всего, аккумуляторный контроллер 10 выводит сигнал дискретизации напряжения из выходного контактного вывода TDX через оптрон PC1 на входной контактный вывод RX для связи интегральной схемы CC3.
После приема сигнала дискретизации напряжения интегральная схема CC3 продолжает детектирование выходных напряжений единичных элементов 1 аккумуляторного модуля M3, подключенного к интегральной схеме CC3. Детектированные выходные напряжения выводятся в качестве сигналов значений напряжения из выходного контактного вывода TX для связи интегральной схемы CC3 вместе с сигналом дискретизации напряжения. Сигналы, выводимые из интегральной схемы CC3, вводятся на входной контактный вывод RXD аккумуляторного контроллера 10 через интегральную схему CC2, интегральную схему CC1 и оптрон PC2. Сигнал дискретизации напряжения передается в интегральную схему CC2 в это время.
После приема сигнала дискретизации напряжения интегральная схема CC2 продолжает детектирование выходных напряжений единичных элементов 1 аккумуляторного модуля M2, подключенного к интегральной схеме CC2. Детектированные выходные напряжения выводятся в качестве сигналов значений напряжения из выходного контактного вывода TX для связи интегральной схемы CC2 вместе с сигналом дискретизации напряжения. Сигналы, выводимые из интегральной схемы CC2, вводятся на входной контактный вывод RXD аккумуляторного контроллера 10 через интегральную схему CC1 и оптрон PC2. Сигнал дискретизации напряжения передается в интегральную схему CC1 в это время.
После приема сигнала дискретизации напряжения интегральная схема CC1 продолжает детектирование выходных напряжений единичных элементов 1 аккумуляторного модуля M1, подключенного к интегральной схеме CC1. Детектированные выходные напряжения выводятся в качестве сигналов значений напряжения из выходного контактного вывода TX для связи интегральной схемы CC1 вместе с сигналом дискретизации напряжения. Сигналы, выводимые из интегральной схемы CC1, вводятся на входной контактный вывод RXD аккумуляторного контроллера 10 через оптрон PC2.
Процесс детектирования для детектирования выходных напряжений единичных элементов 1 аккумуляторных модулей M1-M3, описанный выше, является типичным процессом предшествующего уровня техники, выполняемым посредством устройства мониторинга напряжения аккумулятора, содержащего интегральные схемы, соединенные посредством схемы каскадной связи.
В этом процессе запаздывание во времени возникает неизбежно во времена детектирования значений выходного напряжения единичных элементов 1 в зависимости от аккумуляторных модулей M1-M3. Если аккумуляторный контроллер 10 обрабатывает значения выходного напряжения единичных элементов 1 аккумуляторных модулей M1-M3, таким образом полученные, как практически одновременно детектированные значения выходного напряжения, то с большой вероятностью могут возникнуть ошибки между детектированными значениями и реальными значениями.
Запаздывание во времени относительно детектирования выходных напряжений единичных элементов 1, в частности, заметно в интегральной схеме CC1, которая находится на выходном конце схемы каскадной связи.
Когда аккумуляторный контроллер 10 управляет детектированием и передачей выходных напряжений аккумуляторных модулей M1-M3 в аккумуляторный контроллер 10 через схему каскадной связи, сигнал команды управления из аккумуляторного контроллера 10 сначала вводится в интегральную схему CC3 на входном конце через оптрон PC1.
После приема сигнала команды управления интегральная схема CC3 детектирует выходные напряжения единичных элементов 1 в соответствующем аккумуляторном модуле M3. Детектированные напряжения записываются в сигнал и выводятся из интегральной схемы CC3. Напряжения единичных элементов 1 в аккумуляторном модуле M3 тем самым детектируются и передаются из интегральной схемы CC3. Далее сигнал команды управления, передаваемый из интегральной схемы CC3, принимается посредством интегральной схемы CC2. Как в случае интегральной схемы CC3, интегральная схема CC2 детектирует выходные напряжения единичных элементов 1 в соответствующем аккумуляторном модуле M2. Детектированные напряжения записываются в сигнал, который принят посредством интегральной схемы CC2, и выводятся в интегральную схему CC1 на выходном конце.
Сигнал, таким образом передаваемый через схему каскадной связи, включает в себя данные выходного напряжения единичных элементов 1 в каждом аккумуляторном модуле M1-M3 и в завершение выводится в аккумуляторный контроллер 10 через оптрон PC2. Аккумуляторный контроллер 10 посредством приема этого сигнала завершает детектирование и считывание напряжений единичных элементов 1 в аккумуляторных модулях M1-M3.
Когда детектирование и передача выходных напряжений единичных элементов в аккумуляторных модулях M1-M3 выполняется через такую систему каскадной связи, неизбежно, что аккумуляторные модули M1-M3 выполняют детектирование выходных напряжений единичных элементов 1 в различные времена. Ошибки могут быть введены в данные выходного напряжения единичных элементов 1 вследствие запаздывания во времени для времен детектирования выходных напряжений единичных элементов 1 в аккумуляторных модулях M1-M3. Эти ошибки могут оказывать негативное влияние на точность детектированных выходных напряжений единичных элементов 1.
Запаздывание во времени становится больше по мере того, как число аккумуляторных модулей, соединенных последовательно, увеличивается, или другими словами, число ступеней каскадного соединения увеличивается.
Устройство мониторинга напряжения аккумулятора согласно этому изобретению предотвращает возникновение ошибок, вызываемых посредством запаздывания во времени для времен детектирования при детектировании выходных напряжений единичных элементов аккумуляторных модулей M1-M3, посредством инструктирования интегральным схемам CC1-CC3 дискретизировать и запоминать выходные напряжения единичных элементов 1 аккумуляторных модулей M1-M3 независимо и практически одновременно.
Чтобы реализовывать такую работу устройства мониторинга, аккумуляторный контроллер 10 сначала передает сигнал команды управления для дискретизации и запоминания напряжения в интегральную схему CC3 на входном конце так, что сигнал команды управления для дискретизации и запоминания напряжения передается в каждую из интегральных схем CC1-CC3 через схему каскадной связи. Сигнал команды управления для дискретизации и запоминания напряжения управляет дискретизацией и запоминанием выходных напряжений единичных элементов 1 в интегральных схемах CC1-CC3. Аккумуляторный контроллер 10 затем выводит сигнал команды управления передачей в интегральную схему CC3 на входном конце так, что сигнал команды управления передачей передается через схему каскадной связи в каждую из интегральных схем CC1-CC3 после передачи сигнала команды управления для дискретизации и запоминания напряжения. Сигнал команды управления передачей управляет передачей значений выходного напряжения, запомненных посредством интегральных схем CC1-CC3, в аккумуляторный контроллер 10.
Операция для того, чтобы передавать значения выходного напряжения единичных элементов 1 в аккумуляторный контроллер 10, требует времени. Устройство мониторинга, следовательно, отделяет процесс для дискретизации и запоминания выходных напряжений единичных элементов 1 от процесса для передачи значений выходного напряжения, запомненных посредством интегральных схем CC1-CC3, в аккумуляторный контроллер 10, так что первый процесс может выполняться практически одновременно посредством интегральных схем CC1-CC3.
Ссылаясь на фиг.3A, 3B и фиг.4, описывается детектирование выходного напряжения группы 3 аккумуляторов и управление выходным крутящим моментом электромотора 2 на основе результата детектирования.
Фиг.3A показывает структуру данных, передаваемых из аккумуляторного контроллера 10 в интегральную схему CC3. Фиг.3B показывает структуру данных, передаваемых из интегральной схемы CC3 в интегральную схему CC2.
Как показано на чертеже, сигнал команды управления для дискретизации и запоминания напряжения, который аккумуляторный контроллер 10 выводит в интегральную схему CC3, содержит синхронизирующие данные и управляющие данные. Управляющие данные включают в себя команду и информацию адреса, касающуюся единичных элементов 1, выходные напряжения которых должны детектироваться.
Интегральная схема CC3 передает сигнал команды управления для дискретизации и запоминания напряжения, вводимый на входной контактный вывод RX для связи интегральной схемы CC3 из аккумуляторного контроллера 10, на входной контактный вывод RX для связи интегральной схемы CC2 из выходного контактного вывода TX для связи без модификации. Интегральная схема CC3 идентифицирует сигнал команды управления для дискретизации и запоминания напряжения также в качестве сигнала, направляемого в интегральную схему CC3, и сохраняет значения выходного напряжения единичных элементов 1 аккумуляторного модуля M3, которые вводятся на входные контактные выводы VC1-VC4 для напряжения интегральной схемы CC3, в запоминающем устройстве цифровой вычислительной схемы 24.
Аналогично интегральная схема CC2 передает сигнал команды управления для дискретизации и запоминания напряжения, вводимый на входной контактный вывод RX для связи интегральной схемы CC2 из интегральной схемы CC3, на входной контактный вывод RX для связи интегральной схемы CC1 из выходного контактного вывода TX для связи без модификации. Интегральная схема CC2 идентифицирует сигнал команды управления для дискретизации и запоминания напряжения также в качестве сигнала, направляемого в интегральную схему CC2, и записывает выходные напряжения единичных элементов 1 аккумуляторного модуля M2, которые вводятся на входные контактные выводы VC1-VC4 для напряжения интегральной схемы CC2, в запоминающее устройство цифровой вычислительной схемы 24.
Также аналогично интегральная схема CC1 передает сигнал команды управления для дискретизации и запоминания напряжения, вводимый на входной контактный вывод RX для связи интегральной схемы CC1 из интегральной схемы CC2, на входной контактный вывод RXD аккумуляторного контроллера 10 из выходного контактного вывода TX для связи через оптрон PC2 без модификации. Интегральная схема CC1 идентифицирует сигнал команды управления для дискретизации и запоминания напряжения также в качестве сигнала, направляемого в интегральную схему CC1, и записывает выходные напряжения единичных элементов 1 аккумуляторного модуля M1, которые вводятся на входные контактные выводы VC1-VC4 для напряжения интегральной схемы CC1, в запоминающее устройство цифровой вычислительной схемы 24.
Аккумуляторный контроллер 10 определяет то, что сигнал команды управления для дискретизации и запоминания напряжения передан в интегральную схему CC1, которая находится на выходном конце схемы каскадной связи, посредством приема сигнала команды управления для дискретизации и запоминания напряжения, передаваемого из интегральной схемы CC1, через оптрон PC2.
После этого определения аккумуляторный контроллер 10 выводит сигнал команды управления передачей в интегральную схему CC3.
Интегральная схема CC3 в ответ на сигнал команды управления передачей, принятый на входном контактном выводе RX для связи, выводит сигналы CELL1-CELL4 ответа, содержащие значения выходного напряжения единичных элементов 1 аккумуляторного модуля M3, которые сохраняются в запоминающем устройстве цифровой вычислительной схемы 24, из выходного контактного вывода TX для связи.
Сигнал CELL1 ответа содержит значение выходного напряжения единичного элемента 1, подключенного к входному контактному выводу VC1 для напряжения интегральной схемы M3. Сигнал CELL2 ответа содержит значение выходного напряжения единичного элемента 1, подключенного к входному контактному выводу VC2 для напряжения интегральной схемы M3. Сигнал CELL3 ответа содержит значение выходного напряжения единичного элемента 1, подключенного к входному контактному выводу VC3 для напряжения интегральной схемы M3. Сигнал CELL4 ответа содержит значение выходного напряжения единичного элемента 1, подключенного к входному контактному выводу VC4 для напряжения интегральной схемы M3.
Ссылаясь на фиг.3B, сигнал команды управления передачей содержит синхронизирующие данные и управляющие данные, как в случае сигнала команды управления для дискретизации и запоминания напряжения, показанного на фиг.3A. Тем не менее, управляющие данные сигнала команды управления передачей отличаются от управляющих данных сигнала команды управления для дискретизации и запоминания напряжения.
Аналогично интегральная схема CC2 и интегральная схема CC1 соответственно выводят сигналы CELL1-CELL4 ответа из своего выходного контактного вывода TX для связи в ответ на сигнал команды управления передачей.
Как описано выше, в этом устройстве мониторинга сигнал команды управления для дискретизации и запоминания напряжения передается во все интегральные схемы CC1-CC3, и интегральные схемы CC1-CC3 определяют выходные напряжения единичных элементов 1 и сохраняют значения выходного напряжения в запоминающем устройстве цифровой вычислительной схемы 24. Эта операция выполняется посредством каждой из интегральных схем CC1-CC3 параллельно и практически синхронно.
Интегральные схемы CC1-CC3 затем выводят значения выходного напряжения, сохраненные в запоминающем устройстве соответствующих цифровых вычислительных схем 24, из выходного контактного вывода TX для связи в ответ на сигнал команды управления передачей.
Соответственно, детектирование значений выходного напряжения единичных элементов 1 выполняется до передачи детектированных значений выходного напряжения посредством интегральной схемы, расположенной на входной стороне схемы каскадного соединения. Передача детектированных значений выходного напряжения из интегральной схемы, расположенной на входной стороне схемы каскадного соединения, не приводит к задержке при детектировании выходных напряжений единичных элементов 1 посредством интегральной схемы, расположенной ближе к выходу. Как результат, детектирование выходных напряжений единичных элементов 1 выполняется практически одновременно во всех аккумуляторных модулях M1-M3.
Ссылаясь на фиг.4, описывается процедура, выполняемая посредством аккумуляторного контроллера 10 для определения выходного напряжения группы 3 аккумуляторов на основе выходных напряжений единичных элементов 1 аккумуляторных модулей M1-M3. Эта процедура выполняется многократно через равные интервалы времени в 40 мс, например, независимо от режима работы транспортного средства.
На этапе S1 аккумуляторный контроллер 10 определяет то, является или нет действующей электрическая нагрузка, включающая в себя электромотор 2. Когда определение является отрицательным, аккумуляторный контроллер 10 сразу завершает процедуру.
Когда, с другой стороны, определение является положительным, аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения в интегральную схему CC3 на этапе S2. Интегральные схемы CC1-CC3 при приеме сигнала команды управления для дискретизации и запоминания напряжения записывают значения выходных напряжений единичных элементов 1, вводимые на входные контактные выводы VC1-VC4 для напряжения, в запоминающее устройство цифровой вычислительной схемы 24, соответственно.
На этапе S3 аккумуляторный контроллер 10 выводит сигнал команды управления передачей в интегральную схему CC3. Интегральные схемы CC1-CC3 в ответ на сигнал команды управления передачей передают, соответственно, значения выходных напряжений единичных элементов 1, сохраненные в запоминающем устройстве, в аккумуляторный контроллер 10 в качестве сигналов CELL1-CELL4 ответа.
После приема сигналов CELL1-CELL4 ответа из интегральных схем CC1-CC3 аккумуляторный контроллер 10 вычисляет суммарное значение Vcellsum выходных напряжений единичных элементов 1 аккумуляторного модуля M1-M3.
На этапе S4 аккумуляторный контроллер 10 считывает суммарное значение Vcellsum выходных напряжений единичных элементов 1 аккумуляторного модуля M1-M3.
На следующем этапе S5 аккумуляторный контроллер 10 сравнивает суммарное значение Vcellsum с предварительно определенным пороговым значением Vmin. Пороговое значение Vmin является опорным значением для определения того, является или нет достаточной величина заряда группы 3 аккумуляторов. Когда суммарное значение Vcellsum превышает пороговое значение Vmin, аккумуляторный контроллер 10 сразу завершает процедуру. В этом случае величина заряда группы 3 аккумуляторов определяется как достаточная, и ограничение не применяется к выходному крутящему моменту электромотора 2.
Когда, с другой стороны, суммарное значение Vcellsum не превышает пороговое значение Vmin на этапе S5, аккумуляторный контроллер 10 выводит сигнал ограничения выходного крутящего момента в главный контроллер 100 на этапе S6.
После приема сигнала ограничения выходного крутящего момента главный контроллер 100 ограничивает выходной крутящий момент электромотора 2 так, что он не превышает заданное ограничение крутящего момента, посредством управления инвертором, который подключен к электромотору 2. Как результат, чрезмерная разрядка группы 3 аккумуляторов не возникает, даже когда водитель транспортного средства нажимает педаль акселератора.
Устройство мониторинга согласно этому изобретению отделяет сигнал команды управления для дискретизации и запоминания напряжения от сигнала команды управления передачей, как описано выше. Как результат, интегральные схемы CC1-CC3 дискретизируют и запоминают выходные напряжения единичных элементов 1 практически синхронно в ответ на сигнал команды управления для дискретизации и запоминания напряжения. Значения выходных напряжений единичных элементов 1, сохраненные в запоминающем устройстве, выводятся в аккумуляторный контроллер 10 только тогда, когда интегральные схемы CC1-CC3 принимают сигнал команды управления передачей. При выполнении детектирования выходных напряжений единичных элементов 1 и их передачи таким образом время запаздывания во времена детектирования выходных напряжений единичных элементов 1 аккумуляторных модулей M1-M3 уменьшается на большую величину. Посредством уменьшения времени запаздывания суммарное значение Vcellsum выходных напряжений единичных элементов 1 может точно вычисляться.
При условии, что число единичных элементов 1, составляющих аккумуляторные модули, равно N, а общее число единичных элементов 1 группы 3 аккумуляторов, состоящей из аккумуляторных модулей, равно M, число аккумуляторных модулей представляется посредством M/N. При условии, что интегральная схема передает сигнал дискретизации напряжения в смежную интегральную схему, соединенную через схему каскадной связи, после вывода детектированных значений напряжения единичных элементов 1, как в случае процесса предшествующего уровня техники, и что двадцать миллисекунд (20 мс) требуются для каждой интегральной схемы, чтобы детектировать выходное напряжение единичных элементов 1 релевантного аккумуляторного модуля, время, требуемое для обработки, соответствующей этапам S2 и S3 на фиг.4, равно 20×M/N (мс). В этом случае запаздывание во времени, почти равное 20×M/N (мс), возникает между интегральной схемой на входном конце схемы каскадной связи и интегральной схемой на ее выходном конце во время детектирования выходных напряжений единичных элементов 1.
В этом устройстве мониторинга, поскольку сигнал команды управления для дискретизации и запоминания напряжения и сигнал команды управления передачей формируются отдельно, моменты времени детектирования выходного напряжения единичных элементов 1 в аккумуляторных модулях M1-M3 являются почти идентичными. Согласно этому устройству мониторинга поэтому заметный эффект получается в подавлении запаздывания во времени. В переходном состоянии транспортного средства, к примеру, при пуске транспортного средства, электрическая нагрузка варьируется быстро. Подавление запаздывания во времени увеличивает точность, с которой детектируется величина заряда группы 3 аккумуляторов. Состояние нагрузки группы 3 аккумуляторов тем самым управляется точно в переходном состоянии транспортного средства.
Когда устройство мониторинга согласно этому изобретению применяется к электромобилю с гибридным приводом, устройство мониторинга также может использоваться для управления зарядкой от рекуперативной мощности.
В частности, главный контроллер 100 управляет операцией зарядки группы 3 аккумуляторов через инвертор так, что группа 3 аккумуляторов заряжается с использованием мощности, генерируемой посредством электромотора 2, когда выполняется рекуперативное торможение транспортного средства. С этой целью аккумуляторный контроллер 10 сравнивает суммарное значение Vcellsum выходных напряжений единичных элементов 1 с предварительно определенным пороговым значением Vmax. Если суммарное значение Vcellsum ниже порогового значения Vmax, аккумуляторный контроллер 10 определяет то, что группа 3 аккумуляторов может заряжаться дополнительно, и выводит сигнал в главный контроллер 100, чтобы продолжать зарядку группы аккумуляторов с использованием мощности, генерируемой посредством рекуперативного торможения. Если, с другой стороны, суммарное значение Vcellsum выходных напряжений единичных элементов 1 не ниже порогового значения Vmax, аккумуляторный контроллер 10 определяет то, что группа 3 аккумуляторов может подвергаться чрезмерной зарядке, и выводит сигнал прекращения зарядки в главный контроллер 100.
Как описано выше, это устройство мониторинга приводит к предпочтительному эффекту в предотвращении чрезмерной разрядки группы 3 аккумуляторов, а также в предотвращении чрезмерной зарядки группы 3 аккумуляторов.
На этапе S5 аккумуляторный контроллер 10 сравнивает суммарное значение Vcellsum выходных напряжений единичных элементов 1 с пороговым значением Vmin, чтобы определять величину заряда группы 3 аккумуляторов. Определение величины заряда группы 3 аккумуляторов может выполняться с использованием различных параметров, отличных от суммарного значения Vcellsum выходных напряжений единичных элементов 1. Например, величина заряда группы 3 аккумуляторов может быть определена на основе выходного напряжения конкретного единичного элемента 1 или может быть определена на основе максимального значения или минимального значения из значений выходного напряжения аккумуляторных модулей M1-M3.
Реле 4 выступает в качестве главного выключателя, инструктирующего всем электрическим нагрузкам, включающим в себя электромотор 2 и кондиционер, быть готовым к работе. Следует отметить, что электрические нагрузки не работают только при включении реле 4, а работают, когда они принимают сигнал команды управления работой от главного контроллера 100.
Когда реле 4 включено, но электрические нагрузки являются бездействующими, выходные напряжения единичных элементов 1 аккумуляторных модулей M1-M3 при отсутствии нагрузки детектируются посредством выполнения процедуры. Выходной крутящий момент электромотора 2 затем управляется на основе детектированных значений выходного напряжения на этапе S6. Следовательно, можно ограничивать выходной крутящий момент электромотора 2 до того, как он начинает работать. Это ограничение не допускает чрезмерную разрядку группы 3 аккумуляторов посредством инструктирования электромотору 2 начинать работу в то время, когда состояние зарядки группы 3 аккумуляторов является низким.
Дополнительно, если источник питания для управления аккумуляторным контроллером 10 и интегральными схемами CC1-CC3 предоставляется отдельно, можно детектировать выходные напряжения единичных элементов 1, даже когда реле 4 находится в отключенном состоянии. В этом случае величина заряда группы 3 аккумуляторов может детектироваться до переключения реле 4 на включенное состояние, тем самым заранее ограничивая выходной крутящий момент электромотора 2 перед началом работы.
При ссылке на фиг.5 и 6 описывается второй вариант осуществления этого изобретения.
Этот вариант осуществления отличается от первого варианта осуществления в том, что устройство мониторинга содержит схему 20 детектирования полного выходного напряжения, и аккумуляторный контроллер 10 выполняет процедуру определения отклонений в интегральных схемах CC1-CC3 вместо процедуры определения выходного напряжения, выполняемой для группы 3 аккумуляторов.
Ссылаясь на фиг.5, схема 20 детектирования полного выходного напряжения подключается к контактным выводам, предоставленным в обоих электрических концах группы 3 аккумуляторов так, что она детектирует выходное напряжение группы 3 аккумуляторов напрямую. Схема 20 детектирования полного выходного напряжения состоит из интегральной схемы аналогично интегральным схемам CC1-CC3 и содержит цифровую вычислительную схему, имеющую запоминающее устройство, чтобы сохранять значение полного выходного напряжения группы 3 аккумуляторов. Схема 20 детектирования полного выходного напряжения подключается к аккумуляторному контроллеру 10 через оптрон PC3 и оптрон PC4.
При ссылке на фиг.6, описывается процедура определения отклонений интегральных схем CC1-CC3. Эта процедура выполняется посредством аккумуляторного контроллера 10 на основе полного выходного напряжения группы 3 аккумуляторов и выходных напряжений единичных элементов 1 аккумуляторных модулей M1-M3. В отличие от процедуры по фиг.4 эта процедура выполняется только один раз, когда транспортное средство начинает работать.
В этом варианте осуществления мощность для управления аккумуляторным контроллером 10 подается постоянно без прохождения через реле 4.
На этапе S11 аккумуляторный контроллер 10 определяет то, находится или нет реле 4 во включенном состоянии.
Когда реле 4 не находится во включенном состоянии, аккумуляторный контроллер 10 ожидает до тех пор, пока реле 4 не переключается на включенное состояние.
Когда реле 4 находится во включенном состоянии, аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения в интегральные схемы на этапе S12. Он также выводит сигнал команды управления для дискретизации и запоминания напряжения в схему 20 детектирования полного выходного напряжения. Сигнал команды управления для дискретизации и запоминания напряжения, выводимый в схему 20 детектирования полного выходного напряжения, не обязательно содержит информацию адреса, поскольку схема 20 детектирования полного выходного напряжения подключается к аккумуляторному контроллеру 10 через независимую сигнальную схему. После приема сигнала команды управления для дискретизации и запоминания напряжения интегральные схемы CC1-CC3 детектируют выходные напряжения единичных элементов 1 аккумуляторных модулей M1-M3, подключенных к ним, и сохраняют детектированные значения выходного напряжения в запоминающем устройстве соответствующих цифровых вычислительных схем 24. После приема сигнала команды управления для дискретизации и запоминания напряжения схема 20 детектирования полного выходного напряжения детектирует полное выходное напряжение группы 3 аккумуляторов и сохраняет детектированное значение полного выходного напряжения в запоминающем устройстве цифровой вычислительной схемы.
Сигнал команды управления для дискретизации и запоминания напряжения, выводимый в интегральную схему CC1, в завершение вводится в аккумуляторный контроллер 10 из интегральной схемы CC3 через оптрон PC2. Посредством распознавания ввода сигнала команды управления для дискретизации и запоминания напряжения аккумуляторный контроллер 10 определяет то, что передача сигнала команды управления для дискретизации и запоминания напряжения в интегральные схемы CC1-CC3 завершена.
После определения того, что передача сигнала команды управления для дискретизации и запоминания напряжения в интегральные схемы CC1-CC3 завершена, аккумуляторный контроллер 10 выводит сигнал команды управления работой в электромотор 2 на этапе S13. Электромотор 2 тем самым начинает работу с использованием мощности, предоставленной из группы 3 аккумуляторов.
На следующем этапе S14 аккумуляторный контроллер 10 выводит сигнал команды управления передачей в интегральную схему CC3 и схему 20 детектирования полного выходного напряжения. Аккумуляторный контроллер 10 затем считывает значения выходного напряжения единичных элементов 1, которые передаются из интегральных схем CC1-CC3 в ответ на сигнал команды управления передачей, и значение полного выходного напряжения Vsum группы 3 аккумуляторов, которое передается из схемы 20 детектирования полного выходного напряжения в ответ на сигнал команды управления передачей. Аккумуляторный контроллер 10 вычисляет суммарное значение Vcellsum выходных напряжений единичных элементов 1, как в случае этапа S3 первого варианта осуществления. Результат этого вычисления сохраняется в запоминающем устройстве аккумуляторного контроллера 10.
На этапе S15 аккумуляторный контроллер 10 считывает суммарное значение Vcellsum выходных напряжений единичных элементов 1 и полное выходное напряжение Vsum группы 3 аккумуляторов.
На этапе S16 аккумуляторный контроллер 10 определяет то, превышает или нет абсолютное значение разности между суммарным значением Vcellsum выходных напряжений единичных элементов 1 и полным выходным напряжением Vsum группы 3 аккумуляторов постоянное значение C.
Если интегральные схемы CC1-CC3 и схема 20 детектирования полного выходного напряжения не демонстрируют отклонения, значение Vcellsum и значение Vsum должны быть практически равными. Постоянное значение C задается около предельной ошибки, которая может возникать во время детектирования напряжения. Когда определение на этапе S16 является отрицательным, определяется то, что интегральные схемы CC1-CC3 работают нормально.
Тем не менее, когда абсолютное значение разности между суммарным значением Vcellsum выходных напряжений единичных элементов 1 и полным выходным напряжением Vsum не превышает постоянное значение C, аккумуляторный контроллер 10 сразу завершает процедуру без перехода к другим этапам.
Когда, например, цифровая вычислительная схема 24 интегральной схемы CC2 является неисправной, интегральная схема CC2 не может запоминать выходные напряжения единичных элементов 1 аккумуляторного модуля M2 в цифровой вычислительной схеме 24. Как результат, нулевые значения передаются из интегральной схемы CC2 в аккумуляторный контроллер 10 в ответ на сигнал команды управления передачей.
В этом случае большая разница возникает между суммарным значением Vcellsum выходных напряжений единичных элементов 1 и полным выходным напряжением Vsum группы 3 аккумуляторов. Когда абсолютное значение разности превышает постоянное значение C, аккумуляторный контроллер 10 указывает на дисплейном устройстве, что ненормальность существует, по меньшей мере, в одной из интегральных схем CC1-CC3 или в схеме 20 детектирования полного выходного напряжения на этапе S17.
Поскольку аккумуляторный контроллер 10 может вычислять суммарное значение выходных напряжений единичных элементов 1 каждого из аккумуляторных модулей M1-M3 из входных сигналов, можно, чтобы аккумуляторный контроллер 10 указывал, какая интегральная схема является неисправной. Дополнительно, аккумуляторный контроллер 10 может принимать меры обеспечения безопасности через главный контроллер 100, к примеру, запрет работы электромотора 2, а также указание отклонения в интегральных схемах на этапе S17.
Согласно этому варианту осуществления, относительно детектирования выходных напряжений единичных элементов 1, вывод сигнала команды управления для дискретизации и запоминания напряжения и вывод сигнала команды управления передачей в интегральную схему CC3 выполняются в отдельных процессах, как в случае первого варианта осуществления. Также согласно этому варианту осуществления запаздывание во времени при детектировании выходных напряжений единичных элементов 1 исключается и достигается повышение точности, с которой детектируется суммарное значение Vcellsum выходных напряжений единичных элементов 1. Посредством простого применения схемы 20 детектирования полного выходного напряжения к устройству мониторинга первого варианта осуществления этот вариант осуществления может точно выполнять определение отклонений в интегральных схемах CC1-CC3, а также выполнять управление выходным крутящим моментом электромотора 2.
В этом варианте осуществления процедура определения отклонений относительно интегральных схем CC1-CC3 выполняется посредством аккумуляторного контроллера 10. Тем не менее, можно конфигурировать главный контроллер 100, чтобы выполнять процедуру определения отклонений вместо аккумуляторного контроллера 10.
При ссылке на фиг.7, фиг.8A, 8B, фиг.9A, 9B и фиг.10 описывается третий вариант осуществления этого изобретения.
Этот вариант осуществления применяется к электромобилю с гибридным приводом. Электромобиль с гибридным приводом содержит два источника мощности, расходуемой на движение, т.е. электромотор 2 и двигатель внутреннего сгорания. В данном документе электромотор 2 также выступает в качестве стартерного электромотора для двигателя внутреннего сгорания.
Ссылаясь на фиг.7, устройство мониторинга содержит температурные датчики 7, которые детектируют температуру воздуха аккумуляторных модулей M1-M3. Температуры, детектированные посредством температурных датчиков 7, вводятся в аккумуляторный контроллер 10 в качестве сигналов через независимую сигнальную схему.
Сигнал запуска, указывающий то, что электромотор 2 является действующим, или, другими словами, указывающий запуск двигателя внутреннего сгорания, вводится в аккумуляторный контроллер 10 из электромотора 2.
На основе этих сигналов аккумуляторный контроллер 10 выполняет процедуру определения отклонений аккумуляторного модуля, показанную на фиг.10.
Устройство мониторинга сохраняет выходные напряжения единичных элементов 1, вводимые на входные контактные выводы VC1-VC4 для напряжения интегральных схем CC1-CC3, в запоминающем устройстве цифровых вычислительных схем 24 соответствующих интегральных схем CC1-CC3 в ответ на сигнал команды управления для дискретизации и запоминания напряжения, выводимый из аккумуляторного контроллера 10, как в случае первого варианта осуществления. Устройство мониторинга передает сохраненные значения выходного напряжения единичных элементов 1 в аккумуляторный контроллер 10 в ответ на сигнал команды управления передачей, выводимый из аккумуляторного контроллера 10.
Аккумуляторный контроллер 10 включает лампу аварийной сигнализации, когда любое из выходных напряжений единичных элементов 1 ниже или равно предварительно определенному первому пороговому напряжению Va чрезмерной разрядки или второму пороговому напряжению Vb чрезмерной разрядки в зависимости от условия нагрузки группы 3 аккумуляторов.
Первое пороговое напряжение Va чрезмерной разрядки является пороговым значением для определения отклонений в выходных напряжениях единичных элементов 1 в состоянии отсутствия нагрузки. Второе пороговое напряжение Vb чрезмерной разрядки является пороговым значением для определения отклонений в выходных напряжениях единичных элементов 1 в нагруженном состоянии при низкой температуре. В данном документе состояние отсутствия нагрузки обозначает состояние, в котором запуск двигателя внутреннего сгорания не выполняется, в то время как нагруженное состояние обозначает состояние, в котором запуск двигателя внутреннего сгорания выполняется в состоянии низкой температуры.
Когда электрическая нагрузка прикладывается к единичным элементам 1 в состоянии низкой температуры, в котором внутреннее сопротивление единичных элементов 1 является большим, единичные элементы 1 разряжают большой ток питания. Как результат, единичные элементы 1 демонстрируют значительное падение напряжения. Рассматривая эту ситуацию, второе пороговое напряжение Vb чрезмерной разрядки задается равным меньшему значению, чем первое пороговое напряжение Va чрезмерной разрядки.
Аккумуляторный контроллер 10 определяет то, имеются или нет отклонения в выходном напряжении какого-либо из единичных элементов 1, посредством выборочного приложения первого порогового напряжения Va чрезмерной разрядки и второго порогового напряжения Vb чрезмерной разрядки согласно температуре и условиям нагрузки и включает лампу аварийной сигнализации согласно результату определения.
Поскольку это устройство мониторинга использует схему каскадной связи для связи между соответствующими интегральными схемами CC1-CC3 и аккумуляторным контроллером 10, общий период времени, требуемый для каждой из интегральных схем CC1-CC3, чтобы детектировать выходные напряжения единичных элементов 1 и сохранять детектированные значения выходного напряжения в запоминающем устройстве, меньше общего периода времени, требуемого для интегральных схем CC1-CC3, чтобы передавать сохраненные значения выходного напряжения в аккумуляторный контроллер 10. В электромобиле с гибридным приводом главный контроллер 100 выводит команду запуска относительно двигателя внутреннего сгорания в электромотор 2, и электромотор 2 начинает запуск двигателя внутреннего сгорания в ответ на команду запуска.
В течение периода времени от вывода команды запуска до тех пор, пока запуск двигателя внутреннего сгорания фактически не начинается, аккумуляторный контроллер 10 сравнивает выходные напряжения V1-Vn единичных элементов 1 с первым пороговым напряжением Va чрезмерной разрядки. Когда выходное напряжение любого из единичных элементов 1 ниже или равно первому пороговому напряжению Va чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что релевантный единичный элемент 1 имеет отклонения, и включает лампу аварийной сигнализации.
В течение периода времени, в котором выполняется запуск двигателя внутреннего сгорания, аккумуляторный контроллер 10 сравнивает выходные напряжения V1-Vn единичных элементов 1 со вторым пороговым напряжением Vb чрезмерной разрядки. Когда выходное напряжение любого из единичных элементов 1 ниже или равно второму пороговому напряжению Vb чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что релевантный единичный элемент 1 имеет отклонения, и включает лампу аварийной сигнализации.
Когда запуск двигателя внутреннего сгорания завершен, аккумуляторный контроллер 10 снова сравнивает выходное напряжение V1-Vn единичных элементов 1 с первым пороговым напряжением Va чрезмерной разрядки. Когда выходное напряжение любого из единичных элементов 1 ниже или равно первому пороговому напряжению Va чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что релевантный единичный элемент 1 имеет отклонения, и включает лампу аварийной сигнализации.
Номера в кружках от 1 до N на фиг.8A, 8B и фиг.9A, 9B обозначают порядок детектирования выходных напряжений единичных элементов 1. Число 1 в кружке обозначает выходное напряжение V1 единичного элемента 1, расположенного ближе всех к отрицательному электроду группы 3 аккумуляторов на фиг.7, в то время как число N в кружке обозначает выходное напряжение Vn единичного элемента 1, расположенного ближе всех к положительному электроду группы 3 аккумуляторов. На временных диаграммах фиг.8B и 9B ордината представляет напряжение, в то время как абсцисса представляет время. Интегральные схемы CC1-CC3 детектируют выходные напряжения единичных элементов 1 и сохраняют детектированные значения напряжения в запоминающем устройстве в цифровой вычислительной схеме 24 в ответ на сигнал команды управления для дискретизации и запоминания напряжения, который аккумуляторный контроллер 10 выводит в каждом периоде T цикла. Интегральные схемы CC1-CC3 передают сохраненные значения напряжения в аккумуляторный контроллер 10 в ответ на сигнал команды управления передачей, который аккумуляторный контроллер 10 выводит отдельно от сигнала команды управления для дискретизации и запоминания напряжения в каждом периоде T цикла.
При ссылке на фиг.10 описывается процедура определения отклонений относительно единичных элементов 1, которая выполняется посредством аккумуляторного контроллера 10. Аккумуляторный контроллер 10 многократно выполняет эту процедуру через регулярные интервалы, например, десять миллисекунд, когда включена подача питания в аккумуляторный контроллер 10.
Поскольку эта процедура предположительно выполняется при условии низкой температуры, конкретный этап детектирования температуры не предоставляется. Аккумуляторный контроллер 10 может определять то, соответствует или нет текущее состояние предварительно определенному условию низкой температуры, на основе температуры, детектированной посредством температурных датчиков 7, и выполнять процедуру только тогда, когда текущее состояние соответствует условию низкой температуры. Тем не менее, можно выполнять процедуру независимо от температурных условий.
На этапе S32 аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения в интегральную схему CC3. Интегральные схемы CC1-CC3 сохраняют выходные напряжения единичных элементов 1, вводимые на входные контактные выводы VC1-VC4 для напряжения, в запоминающем устройстве цифровой вычислительной схемы 24 в качестве цифровых значений в ответ на сигнал команды управления для дискретизации и запоминания напряжения, как описано выше.
На следующем этапе S33 аккумуляторный контроллер 10 выводит сигнал команды управления передачей в интегральную схему CC3. Интегральные схемы CC1-CC3 передают сохраненные значения напряжения в аккумуляторный контроллер 10 в форме сигналов CELL1-CELL4 в ответ на сигнал команды управления передачей. Аккумуляторный контроллер 10 считывает эти значения. В последующем описании значения выходного напряжения единичных элементов 1, передаваемые в аккумуляторный контроллер 10, называются V1, V2, V3, ..., Vn от стороны отрицательного электрода к стороне положительного электрода группы 3 аккумуляторов на фиг.7.
Когда ввод сигналов CELL1-CELL4 ответа из каждой из интегральных схем CC1-CC3 завершен, аккумуляторный контроллер 10 определяет то, выполняется или нет запуск двигателя внутреннего сгорания посредством электромотора 2, на этапе S34 на основе входных сигналов из электромотора 2.
Когда запуск двигателя внутреннего сгорания не выполняется, аккумуляторный контроллер 10 определяет то, завершен или нет запуск двигателя внутреннего сгорания, на этапе S35.
Когда запуск двигателя внутреннего сгорания не завершен, это означает, что запуск двигателя внутреннего сгорания еще не начат. В этом случае аккумуляторный контроллер 10 сравнивает значения V1-Vn выходного напряжения единичных элементов 1 с первым пороговым напряжением Va чрезмерной разрядки на этапе S36.
Когда в результате сравнения все значения V1-Vn выходного напряжения равны или превышают первое пороговое напряжение Va чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что группа 3 аккумуляторов работает нормально. В этом случае аккумуляторный контроллер 10 завершает процедуру.
Если в результате сравнения на этапе S36 какое-либо из значений V1-Vn выходного напряжения ниже или равно первому пороговому напряжению Va чрезмерной разрядки, аккумуляторный контроллер 10 включает лампу аварийной сигнализации на этапе S37 и завершает процедуру.
Когда запуск двигателя внутреннего сгорания выполняется на этапе S34, аккумуляторный контроллер 10 определяет на этапе S38, завершен или нет ввод значений V1-Vn выходного напряжения в течение текущего периода цикла.
Когда определение на этапе S38 является отрицательным, аккумуляторный контроллер 10 сравнивает значения V1-Vn выходного напряжения единичных элементов 1 с первым пороговым напряжением Va чрезмерной разрядки на этапе S36, как в случае перед началом запуска. Если определение на этапе S38 является отрицательным, значения V1-Vn выходного напряжения, детектированные в течение текущего периода T цикла, являются значениями, детектированными перед началом запуска. В этом случае первое пороговое напряжение Va чрезмерной разрядки для состояния отсутствия нагрузки прикладывается, чтобы оценивать значения V1-Vn выходного напряжения, на этапе S36.
Когда, с другой стороны, определение на этапе S38 является положительным, это означает, что значения V1-Vn выходного напряжения, считанные на этапе S33, являются значениями, детектированными в то время, когда выполняется запуск двигателя внутреннего сгорания посредством электромотора 2. Аккумуляторный контроллер 10 затем сравнивает значения V1-Vn выходного напряжения со вторым пороговым напряжением Vb чрезмерной разрядки на этапе S39.
Когда, в качестве результата сравнения на этапе S39, все значения V1-Vn выходного напряжения превышают второе пороговое напряжение Vb чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что группа 3 аккумуляторов работает нормально. В этом случае аккумуляторный контроллер 10 завершает процедуру.
Когда, с другой стороны, любое из значений V1-Vn выходного напряжения ниже или равно второму пороговому напряжению Vb чрезмерной разрядки на этапе S39, аккумуляторный контроллер 10 включает лампу аварийной сигнализации на этапе S37 и завершает процедуру.
Когда определяется то, что запуск двигателя внутреннего сгорания завершен, на этапе S35, аккумуляторный контроллер 10 определяет на этапе S40, завершен или нет ввод значений V1-Vn выходного напряжения в течение текущего периода цикла.
Когда определение на этапе S40 является отрицательным, аккумуляторный контроллер 10 сравнивает значения V1-Vn выходного напряжения со вторым пороговым напряжением Vb чрезмерной разрядки на этапе S41, как в случае, когда выполняется запуск. Если определение на этапе S40 является отрицательным, значения V1-Vn выходного напряжения, считанные на этапе S33, являются значениями, детектированными в то время, когда выполняется запуск. В этом случае второе пороговое напряжение Vb чрезмерной разрядки для нагруженного состояния прикладывается, чтобы оценивать значения V1-Vn выходного напряжения, на этапе S41.
Если, в качестве результата сравнения, выполняемого на этапе S41, все значения V1-Vn выходного напряжения превышают второе пороговое напряжение Vb чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что группа 3 аккумуляторов работает нормально. В этом случае аккумуляторный контроллер 10 завершает процедуру.
Когда, с другой стороны, любое из значений V1-Vn выходного напряжения ниже или равно второму пороговому напряжению Vb чрезмерной разрядки на этапе S41, аккумуляторный контроллер 10 включает лампу аварийной сигнализации на этапе S43 и завершает процедуру.
Когда определение на этапе S40 является положительным, это означает, что значения V1-Vn выходного напряжения, считанные на этапе S33, являются значениями, детектированными после того, как запуск двигателя внутреннего сгорания завершается. Аккумуляторный контроллер 10 затем сравнивает значения V1-Vn выходного напряжения с первым пороговым напряжением Va чрезмерной разрядки на этапе S42.
Если, в результате сравнения, выполняемого на этапе S42, все значения V1-Vn выходного напряжения превышают первое пороговое напряжение Va чрезмерной разрядки, аккумуляторный контроллер 10 определяет то, что группа 3 аккумуляторов работает нормально. В этом случае аккумуляторный контроллер 10 завершает процедуру.
Когда, с другой стороны, любое из значений V1-Vn выходного напряжения ниже или равно первому пороговому напряжению Va чрезмерной разрядки на этапе S42, аккумуляторный контроллер 10 включает лампу аварийной сигнализации на этапе S43, завершает процедуру и возобновляет процедуру во время начала, когда начинается следующий период T цикла.
Посредством выполнения процедуры, описанной выше, значения V1-Vn выходного напряжения единичных элементов 1, детектированные в состоянии, в котором запуск не выполняется, сравниваются с первым пороговым напряжением Va чрезмерной разрядки, как показано на фиг.8A, 8B и фиг.9A, 9B, отклонения в группе 3 аккумуляторов определяются, и лампа аварийной сигнализации включается, когда отклонения обнаружены. Значения V1-Vn выходного напряжения единичных элементов 1, детектированные в состоянии, в котором выполняется запуск, сравниваются со вторым пороговым напряжением Vb чрезмерной разрядки, которое ниже первого порогового напряжения Va чрезмерной разрядки, как показано на фиг.8A, 8B и фиг.9A, 9B, отклонения в группе 3 аккумуляторов определяются, и лампа аварийной сигнализации включается, когда отклонения обнаружены.
Ссылаясь на фиг.8A и 8B, время начала запуска двигателя внутреннего сгорания посредством электромотора 2 или, другими словами, время, когда запуск переключается из выключенного во включенное состояние на фиг.8A, не совпадает с границей периода T цикла, в котором аккумуляторный контроллер 10 определяет значения V1-Vn выходного напряжения и определяет отклонения группы 3 аккумуляторов. На фиг.8A и 8B ввод всех детектированных значений V1-Vn выходного напряжения в аккумуляторный контроллер 10 не завершается до тех пор, пока время C1 задержки не истекает после того, как запуск переключается из выключенного во включенное состояние.
Следовательно, аккумуляторный контроллер 10 сразу не переключает пороговое напряжение чрезмерной разрядки, даже когда детектируется начало запуска двигателя внутреннего сгорания. Аккумуляторный контроллер 10 переключает пороговое напряжение чрезмерной разрядки с первого порогового напряжения Va чрезмерной разрядки на второе пороговое напряжение Vb чрезмерной разрядки во время следующего периода T цикла, в котором выполняется сравнение, поскольку значения V1-Vn выходного напряжения, сохраненные в запоминающем устройстве цифровой вычислительной схемы 24, являются значениями, детектированными перед началом запуска.
Ссылаясь на фиг.9A и 9B, когда электромотор 2 прекращает запуск двигателя внутреннего сгорания и аккумуляторный контроллер 10 определяет завершение запуска, аккумуляторный контроллер 10 переключает пороговое напряжение чрезмерной разрядки со второго порогового напряжения Vb чрезмерной разрядки на первое пороговое напряжение Va чрезмерной разрядки во время следующего периода T цикла, в котором выполняется сравнение. Другими словами, переключение со второго порогового напряжения чрезмерной разрядки на первое пороговое напряжение чрезмерной разрядки задерживается до тех пор, пока время C2 задержки не истекает после того, как запуск переключается из выключенного во включенное состояние на фиг.9A.
Ссылаясь на фиг.8A и 8B, в течение периода времени до тех пор, пока запуск фактически не начинается, двигатель внутреннего сгорания не запускается. В этом состоянии, поскольку группа 3 аккумуляторов не имеет нагрузку, аккумуляторный контроллер 10 сравнивает во время t1 значения выходного напряжения единичных элементов 1, определенные во время t0, с первым пороговым напряжением чрезмерной разрядки. Аккумуляторный контроллер 10 сравнивает во время t2 значения выходного напряжения единичных элементов 1, определенные во время t1, с первым пороговым напряжением чрезмерной разрядки. Интервалы времени t0, t1, t2, t3, ..., соответствуют периоду T цикла.
Когда электромотор 2 начинает запуск двигателя внутреннего сгорания, электрическая нагрузка прикладывается к группе 3 аккумуляторов. Здесь, тем не менее, аккумуляторный контроллер 10 по-прежнему принимает значения выходного напряжения единичных элементов 1, детектированные во время t2. Аккумуляторный контроллер 10, следовательно, не переключает пороговое напряжение чрезмерной разрядки с первого порогового напряжения Va чрезмерной разрядки на второе пороговое напряжение Vb чрезмерной разрядки сразу. Вместо этого аккумуляторный контроллер 10 выполняет переключение в период T цикла с началом со времени t3 после того, как сравнение значений выходного напряжения с первым пороговым напряжением Va чрезмерной разрядки завершено. После этого аккумуляторный контроллер 10 периодически сравнивает значения выходного напряжения единичных элементов 1 со вторым пороговым напряжением Vb чрезмерной разрядки до тех пор, пока запуск двигателя внутреннего сгорания посредством электромотора 2 не завершается.
Ссылаясь на фиг.9A и 9B, когда запуск двигателя внутреннего сгорания завершен, аккумуляторный контроллер 10 прикладывает второе пороговое напряжение Vb чрезмерной разрядки первого сравнения после того, как запуск переключается из включенного в выключенное состояние. Пороговое напряжение чрезмерной разрядки переключается со второго порогового напряжения Vb чрезмерной разрядки на первое пороговое напряжение Va чрезмерной разрядки в следующем периоде T цикла с началом со времени t8. После этого аккумуляторный контроллер 10 периодически сравнивает значения выходного напряжения единичных элементов 1 с первым пороговым напряжением Va чрезмерной разрядки до тех пор, пока электромотор 2 не приводится в действие снова, например, для начала движения.
Также согласно этому варианту осуществления, относительно детектирования выходных напряжений единичных элементов 1, вывод сигнала команды управления для дискретизации и запоминания напряжения в интегральную схему CC3 на этапе 32 и вывод сигнала команды управления передачей в интегральную схему CC3 на этапе S33 выполняются отдельно, как в случае первого варианта осуществления. Как результат, требуемое время для детектирования выходных напряжений единичных элементов 1 сокращается, и времена C1 и C2 задержки относительно переключения между первым пороговым напряжением Va чрезмерной разрядки и вторым пороговым напряжением Vb чрезмерной разрядки могут сокращаться. Согласно этому варианту осуществления определение отклонений относительно группы 3 аккумуляторов может выполняться точно независимо от того, выполняется или нет запуск двигателя внутреннего сгорания посредством электромотора 2.
С первого по третий варианты осуществления, описанные выше, допускают, что три аккумуляторных модуля и три интегральных схемы предоставляются, но устройство мониторинга согласно этому изобретению может быть реализовано независимо от числа аккумуляторных модулей и интегральных схем.
При ссылке на фиг.11 и фиг.12A-12F описывается четвертый вариант осуществления этого изобретения.
Этот вариант осуществления отличается от второго варианта осуществления в том, что число аккумуляторных модулей и интегральных схем предположительно является неограниченным числом n, и в том, что устройство мониторинга дополнительно содержит температурные датчики 7 для детектирования температуры воздуха аккумуляторных модулей M1-Mn, датчик 8 тока для детектирования выходного тока питания всей группы 3 аккумуляторов и схему 20 детектирования полного выходного напряжения для детектирования полного выходного напряжения группы 3 аккумуляторов. Значения детектирования посредством датчиков/схемы вводятся в аккумуляторный контроллер 10 через независимые сигнальные схемы, соответственно. Другие компоненты устройства являются идентичными компонентам второго варианта осуществления.
Согласно этому варианту осуществления аккумуляторный контроллер 10 запрограммирован с возможностью вычислять наибольшее напряжение VHa (VHb) элемента или наименьшее напряжение VLa (VLb) элемента для единичных элементов 1 и регулировать выходную мощность группы 3 аккумуляторов на основе наибольшего напряжения VHa (VHb) элемента или наименьшего напряжения VLa (VLb) элемента.
Также согласно этому варианту осуществления, аналогично обработке этапов S32, S33 третьего варианта осуществления, аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения и сигнал команды управления передачей отдельно в интегральную схему CCn, подключенную к аккумуляторному модулю Mn, который находится ближе всех к отрицательному электроду аккумулятора 3, как показано на фиг.11.
Интегральные схемы CC1-CCn, при приеме сигнала команды управления для дискретизации и запоминания напряжения, детектируют выходные напряжения единичных элементов 1 аккумуляторных модулей M1-Mn и сохраняют детектированные значения напряжения в запоминающем устройстве, соответственно. Интегральные схемы CC1-CCn соединяются через схему каскадной связи с аккумуляторным контроллером 10 и выводят сохраненные значения выходного напряжения последовательно через регулярные интервалы в аккумуляторный контроллер 10, как показано на фиг.12A, в ответ на сигнал команды управления передачей. Период цикла, в котором интегральные схемы CC1-CCn выводят сохраненные значения выходного напряжения, в данном документе называется периодом T1 цикла дискретизации.
Период времени от того, когда аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения, до того, как значения выходного напряжения всех единичных элементов 1 вводятся в аккумуляторный контроллер 10 из интегральных схем CC1-CCn, называется периодом T2 цикла дискретизации, как показано на фиг.12B.
Также согласно этому устройству мониторинга, поскольку сигнал команды управления для дискретизации и запоминания напряжения передается между интегральными схемами CC1-CCn, которые соединяются посредством схемы каскадной связи, до вывода сохраненных значений напряжения, как в случае первого-третьего вариантов осуществления, период T2 дискретизации может сокращаться по сравнению с устройством мониторинга предшествующего уровня техники.
Когда период T2 цикла дискретизации является длительным, требуется длительное время до тех пор, пока варьирование в выходных напряжениях единичных элементов 1 не отражается в управлении выходной мощностью группы 3 аккумуляторов.
Чтобы сокращать это время, аккумуляторный контроллер 10 периодически вычисляет выходные напряжения единичных элементов в течение периода T2 цикла дискретизации и управляет выходной мощностью группы 3 аккумуляторов на основе результата вычисления, тем самым не допуская чрезмерную зарядку/чрезмерную разрядку группы 3 аккумуляторов.
Ссылаясь на фиг.12B, датчик 8 тока детектирует выходной ток питания группы 3 аккумуляторов в каждом периоде T1 цикла дискретизации и выводит детектированное значение тока питания в аккумуляторный контроллер 10, соответственно. Схема 20 детектирования полного выходного напряжения детектирует полное выходное напряжение группы 3 аккумуляторов в каждом периоде T1 цикла дискретизации и выводит детектированное текущее значение в аккумуляторный контроллер 10, соответственно. Температурные датчики 7 располагаются около аккумуляторных модулей M1-Mn. Температурные датчики 7 детектируют температуру воздуха аккумуляторных модулей M1-Mn в каждом периоде T1 цикла дискретизации и, соответственно, выводят детектированную температуру в аккумуляторный контроллер 10.
Далее описывается управление выходной мощностью группы 3 аккумуляторов посредством аккумуляторного контроллера 10.
В данном документе период T1 цикла дискретизации задается равным входному циклу значений выходного напряжения единичных элементов 1, вводимых в аккумуляторный контроллер 10 из интегральных схем CC1-CCn.
Во время t1 до того, как реле 4 включается, аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения, командующий интегральным схемам CC1-CCn дискретизировать и запоминать выходные напряжения единичных элементов 1. После подтверждения, что сигнал передан в интегральную схему CC1, расположенную на выходном конце схемы каскадной связи, аккумуляторный контроллер 10 выводит сигнал команды управления передачей, управляющий интегральными схемами CC1-CCn для передачи сохраненных значений выходного напряжения в аккумуляторный контроллер 10. Во время t1, поскольку реле 4 находится в отключенном состоянии, входные значения, вводимые в аккумуляторный контроллер 10 в течение периода T2 цикла дискретизации, являются значениями, детектированными, когда группа 3 аккумуляторов находится в состоянии отсутствия нагрузки. Во время t1+T1 реле 4 включается, и после этого электрическая нагрузка прикладывается к группе 3 аккумуляторов, как показано на фиг.12C.
Напротив, полное выходное напряжение Vs группы 3 аккумуляторов из схемы 20 детектирования полного выходного напряжения, выходной ток Ia питания группы 3 аккумуляторов из датчика 8 тока и температуры воздуха аккумуляторных модулей M1-Mn из температурных датчиков 7 вводятся в аккумуляторный контроллер 10 в каждом периоде T1 цикла дискретизации.
Как результат вывода сигнала команды управления передачей, значения выходного напряжения единичных элементов 1 вводятся в аккумуляторный контроллер 10 из интегральных схем CC1-CCn последовательно в каждом периоде T1 дискретизации по всему периоду T2 цикла дискретизации с началом со времени t1. Ввод значений выходного напряжения единичных элементов 1 завершается непосредственно перед временем t2, которое равно времени t1+T2.
Во время t1+T1, когда период T1 цикла дискретизации истек от времени t1, значения выходного напряжения единичных элементов 1, выводимые из интегральной схемы CCn, полное выходное напряжение Vs группы 3 аккумуляторов, выводимое из схемы 20 детектирования полного выходного напряжения, ток питания Ia, выводимый из группы 3 аккумуляторов из датчика 8 тока, и температуры воздуха интегральных схем CC1-CCn, выводимые из температурных датчиков 7, вводятся в аккумуляторный контроллер 10. Поскольку датчики 7, 8 и схема 20 детектирования полного выходного напряжения подключаются к аккумуляторному контроллеру 10 через независимые сигнальные схемы, потери времени не предполагаются из определения даты ввода детектированных данных в аккумуляторный контроллер 10. Другими словами, эти данные детектируются и вводятся в аккумуляторный контроллер 10 во время t1+T1. После времени t1+T1 полные выходные напряжения Vs группы 3 аккумуляторов, выходной ток Ia питания из группы 3 аккумуляторов и температуры воздуха аккумуляторных модулей M1-Mn вводятся в аккумуляторный контроллер 10 в каждом периоде T1 цикла дискретизации вместе со значениями выходного напряжения единичных элементов 1 конкретного аккумуляторного модуля Mx (x=1, 2, ..., n).
Когда ввод всех значений выходного напряжения единичных элементов 1 в аккумуляторный контроллер 10 завершен, аккумуляторный контроллер 10 сразу извлекает наибольшее напряжение VH1 элемента и наименьшее напряжение VL1 элемента из значений выходного напряжения всех единичных элементов 1.
Аккумуляторный контроллер 10 снова выводит сигнал команды управления для дискретизации и запоминания напряжения и дискретизацию напряжения в интегральную схему CCn во время t2 (=t1+T2), с которого начинается следующий период T2 цикла дискретизации.
От времени t2+T1 и далее полное выходное напряжение Va группы 3 аккумуляторов, выходной ток Ia питания группы 3 аккумуляторов и температуры воздуха аккумуляторных модулей M1-Mn вводятся в аккумуляторный контроллер 10 вместе со значениями выходного напряжения единичных элементов 1 конкретного аккумуляторного модуля Mx (x=1, 2... n).
Аккумуляторный контроллер 10, таким образом, считывает все значения выходного напряжения единичных элементов 1 в каждом периоде T2 цикла дискретизации. Аккумуляторный контроллер 10, с другой стороны, считывает полное выходное напряжение Va группы 3 аккумуляторов, выходной ток Ia питания группы 3 аккумуляторов и температуры воздуха аккумуляторных модулей M1-Mn в каждом периоде T1 цикла дискретизации.
Аккумуляторный контроллер 10 затем выполняет следующее вычисление с использованием данных, полученных таким образом.
В частности, как показано на фиг.12D, аккумуляторный контроллер 10 извлекает наибольшее напряжение VH1 элемента и наименьшее напряжение VL1 элемента из всех значений выходного напряжения единичных элементов 1 аккумуляторных модулей M1-Mn в конце периода T2 цикла дискретизации с началом во время t1.
В данном документе наибольшее напряжение VH1 элемента и наименьшее напряжение VL1 элемента являются напряжениями, детектированными сразу после времени t1, когда группа 3 аккумуляторов все еще находится в состоянии отсутствия нагрузки. Выходной ток Ia питания группы 3 аккумуляторов в это время составляет ноль ампер (0A). Значение, полученное посредством деления полного выходного напряжения Vs группы 3 аккумуляторов цикла на число n единичных элементов 1, формирующих группу 3 аккумуляторов, соответствует среднему выходному напряжению единичного элемента 1 в состоянии отсутствия нагрузки.
Аккумуляторный контроллер 10 вычисляет отклонение VdH1 напряжения наибольшего напряжения элемента с использованием следующего соотношения (1):
VdH1=VH1×n-Vs1 (1)
Аккумуляторный контроллер 10 вычисляет отклонение VdL1 напряжения наименьшего напряжения элемента с использованием следующего соотношения (2):
VdL1=Vs1-VL1×n (2)
Разности в характеристиках выходного напряжения единичных элементов 1 формируются посредством погрешности изготовления и т.д. Дополнительно на характеристики выходного напряжения может влиять многократная зарядка и разрядка единичных элементов 1.
Аккумуляторный контроллер 10 вычисляет отклонения напряжения, представляющие внутренне присущие характеристики выходного напряжения единичных элементов 1, посредством применения соотношений (1) и (2).
Аккумуляторный контроллер 10 выполняет следующее вычисление в каждом периоде T1 цикла дискретизации в течение текущего периода T2 цикла дискретизации с использованием отклонения VdH1 напряжения наибольшего напряжения элемента и отклонения VdL1 напряжения наименьшего напряжения элемента, которые получаются в первом периоде T2 цикла дискретизации.
В частности, аккумуляторный контроллер 10 вычисляет наибольшее напряжение VHa посредством применения нижеприведенного соотношения (3) с использованием отклонения VdH1 напряжения наибольшего напряжения элемента и полного выходного напряжения Vsa группы 3 аккумуляторов, детектированного в каждом периоде T1 цикла дискретизации после времени t2.
Это значение соответствует оцененному наибольшему напряжению, которое выходные напряжения единичных элементов 1 могут принимать в течение текущего периода T2 цикла дискретизации:
VHa=(Vsa+VdH1)/n (3)
Полное выходное напряжение Vsa группы 3 аккумуляторов является значением, детектированным в каждом периоде T1 дискретизации после времени t2. Поскольку период T1 дискретизации меньше периода T2 цикла дискретизации выходных напряжений единичных элементов 1, полное выходное напряжение Vs группы 3 аккумуляторов демонстрирует более непрерывное изменение, чем выходное напряжение каждого единичного элемента 1. Отклонение VdH1 напряжения наибольшего напряжения элемента является значением, полученным во время первого периода T2 цикла дискретизации, и соответствует отклонению между полным выходным напряжением Vs1 во время t2 и наибольшим напряжением VH1 элемента. В данном документе наибольшее напряжение VH1 элемента является значением, детектированным сразу после времени t1, в которое выходной ток Ia питания группы 3 аккумуляторов составляет ноль ампер, и представляет отклонение во внутренне присущих характеристиках выходного напряжения единичных элементов 1.
Выходные напряжения единичных элементов 1 варьируются на большую величину во время t1+T1, когда группа 3 аккумуляторов переходит из состояния отсутствия нагрузки в нагруженное состояние. Поскольку отклонение VdH1 напряжения наибольшего элемента является значением в зависимости от внутренне присущих характеристик выходного напряжения единичных элементов 1, амплитуда VdH1 меньше амплитуды варьирования в выходных напряжениях единичных элементов 1 между состоянием отсутствия нагрузки и нагруженным состоянием.
В соотношении (3) для вычисления оцененного наибольшего напряжения аккумуляторный контроллер 10 рассматривает полное выходное напряжение Vsa группы 3 аккумуляторов, которое варьируется непрерывным способом, в качестве базового и добавляет отклонение VdH1 напряжения наибольшего элемента, представляющее внутренне присущие характеристики выходного напряжения единичных элементов 1, к нему. Непрерывность тем самым допускается в варьировании выходного напряжения в течение периода T2 цикла дискретизации после времени t2, и резервирование обеспечивается при управлении выходным напряжением группы 3 аккумуляторов.
Аккумуляторный контроллер 10 также вычисляет наименьшее напряжение VLa в каждом периоде T1 цикла дискретизации посредством применения нижеприведенного соотношения (4) с использованием отклонения VdL1 напряжения наименьшего напряжения элемента и полных выходных напряжений Vsa, детектированных в каждом периоде T1 цикла дискретизации с началом со времени t2. Это значение соответствует оцененному наименьшему напряжению, которое выходные напряжения единичных элементов 1 могут принимать в течение текущего периода T2 цикла дискретизации:
VLa=(Vsa-VdL1)/n (4)
Во время t3-T1 аккумуляторный контроллер 10 завершает считывание значений выходного напряжения всех единичных элементов 1, которые детектируют интегральные схемы CC1-CCn. Эти значения детектируются непосредственно после времени t2 в нагруженном состоянии группы 3 аккумуляторов. Аккумуляторный контроллер 10 извлекает наибольшее напряжение VH2 элемента и наименьшее напряжение VL2 элемента из всех значений выходного напряжения единичных элементов 1 аккумуляторных модулей M1-Mn. Аккумуляторный контроллер 10 вычисляет отклонение RdH2 внутреннего сопротивления наибольшего напряжения элемента посредством применения нижеприведенного соотношения (5) с использованием отклонения VdH1 напряжения наибольшего элемента, полного выходного напряжения VS2 группы 3 аккумуляторов, которое детектировано во время t2, и выходного тока I2 питания группы 3 аккумуляторов, определенного во время t2:
RdH2=(VH2×n-VS2-VdH1)/I2 (5)
В данном документе VH2×n-VS2 соответствует отклонению напряжения наибольшего напряжения элемента во время t2. Соотношение (5) является соотношением, чтобы преобразовывать варьирование в отклонениях напряжения в течение периода времени от времени t1 до времени t2 в значение сопротивления.
Аналогичным образом аккумуляторный контроллер 10 вычисляет отклонение RdL2 внутреннего сопротивления наименьшего напряжения элемента посредством применения соотношения (6) с использованием отклонения VdL1 напряжения наименьшего напряжения элемента, полных выходных напряжений VS2 группы 3 аккумуляторов, детектированных во время t2, и выходного тока I2 питания группы 3 аккумуляторов, детектированного во время t2:
RdL2=(VS2-VL2×n-VdL1)/I2 (6)
Аккумуляторный контроллер 10 вычисляет наибольшее напряжение VHb элемента в каждом периоде T1 цикла дискретизации по всему периоду T2 цикла дискретизации с началом во время t3 посредством применения нижеприведенного соотношения (7) с использованием отклонения VdH1 напряжения наибольшего элемента, полного выходного напряжения Vsb группы 3 аккумуляторов, детектированного в каждом периоде T1 цикла дискретизации, отклонения RdH2 внутреннего сопротивления наибольшего напряжения и выходного тока I2 питания группы 3 аккумуляторов, детектированного в каждом периоде T1 цикла дискретизации. В данном документе VdH1 и RdH2 являются значениями, вычисляемыми непосредственно перед временем t3. Vsb и Ib являются значениями, вводимыми в аккумуляторный контроллер 10 в каждом периоде T1 цикла дискретизации. Наибольшее напряжение VHb элемента, таким образом вычисляемое, соответствует оцененному наибольшему значению, которое значения выходного напряжения единичных элементов 1 могут принимать в каждом периоде T1 цикла дискретизации в текущем периоде T2 цикла дискретизации:
VHb=(VS2+VdH1+RdH2×Ib)/n (7)
Полные выходные напряжения Vsb, детектированные в каждом периоде T1 цикла дискретизации, имеют непрерывность по всему периоду T2 цикла дискретизации. Отклонение VdH1 напряжения наибольшего элемента представляет внутренне присущие характеристики выходного напряжения единичных элементов 1. RdH2×Ib представляет флуктуацию в значениях выходного напряжения единичных элементов 1, сопровождающую изменение во времени между временем t2 и временем t3.
Поэтому, согласно соотношению (7), наибольшее напряжение VHb элемента в каждом периоде T1 цикла дискретизации в течение периода T2 цикла дискретизации с началом со времени t3 может точно вычисляться на основе полного выходного напряжения Vsb группы 3 аккумуляторов, которое варьируется непрерывным способом, с учетом внутренне присущих характеристик выходного напряжения единичных элементов 1 и флуктуации в значениях выходного напряжения единичных элементов 1, сопровождающих изменение во времени между временем t2 и временем t3.
Аккумуляторный контроллер 10 также вычисляет наименьшее напряжение VLb элемента в каждом периоде T1 цикла дискретизации в течение периода T2 цикла дискретизации с началом во время t3, детектированное в каждом периоде T1 цикла дискретизации, посредством применения нижеприведенного соотношения (8) с использованием отклонения VdL1 напряжения наименьшего напряжения элемента, полного выходного напряжения Vsb группы 3 аккумуляторов, отклонения RdL2 внутреннего сопротивления наименьшего напряжения и выходного тока I2 питания группы 3 аккумуляторов, детектированного в каждом периоде T1 цикла дискретизации в течение текущего периода T2 цикла дискретизации:
VLb=(Vsb-VdL1-RdL2×Ib)/n (8)
Аккумуляторный контроллер 10 продолжает вычислять наибольшее напряжение VHb элемента и наименьшее напряжение VLb элемента в каждом периоде T1 дискретизации в течение периода T2 цикла дискретизации с началом во время t4 и позднее.
Аккумуляторный контроллер 10 передает наибольшее напряжение VHa (VHb) элемента и наименьшее напряжение VHa (VLb) элемента, таким образом вычисляемое, в главный контроллер 100. Главный контроллер 100 управляет выходной мощностью группы 3 аккумуляторов, а также величиной зарядки и величиной разрядки из группы 3 аккумуляторов на основе наибольшего напряжения VHa (VHb) элемента и наименьшего напряжения VHa (VLb) элемента.
Также, согласно этому варианту осуществления, поскольку сигнал команды управления для дискретизации и запоминания напряжения передается между интегральными схемами CC1-CCn, которые соединяются посредством схемы каскадной связи, до вывода сохраненных значений напряжения, период T2 цикла дискретизации может задаваться короче. Короткий период T2 цикла дискретизации означает, что частота детектирования выходного напряжения всех единичных элементов 1 является высокой. Соответственно, задание коротким времени T2 цикла дискретизации приводит к повышению точности, с которой управляется выходная мощность группы 3 аккумуляторов.
Согласно этому варианту осуществления в конце первого начального цикла дискретизации T2 от времени t1 аккумуляторный контроллер 10 вычисляет отклонение напряжения наибольшего напряжения элемента с использованием наибольшего напряжения элемента, извлеченного из детектированных значений выходного напряжения единичных элементов, и полного выходного напряжения группы 3 аккумуляторов, детектированного в каждом периоде T1 цикла дискретизации. Аккумуляторный контроллер 10 оценивает наибольшее выходное напряжение единичных элементов 1 в следующем цикле дискретизации T2 на основе отклонения напряжения наибольшего напряжения элемента и полного выходного напряжения группы 3 аккумуляторов, детектированного в каждом периоде T1 цикла дискретизации. С использованием оцененного наибольшего выходного напряжения, таким образом оцененного, управление выходной мощностью группы 3 аккумуляторов может выполняться многократно с интервалами, соответствующими периоду T1 цикла дискретизации, который меньше периода T2 цикла дискретизации, требуемого для детектирования выходных напряжений единичных элементов 1. Как результат, точность управления выходной мощности группы 3 аккумуляторов может повышаться.
Дополнительно, согласно этому варианту осуществления, наибольшее напряжение элемента и наименьшее напряжение элемента оцениваются на основе полного выходного напряжения аккумулятора 3, которое детектируется в каждом коротком периоде T1 цикла дискретизации и в результате варьируется непрерывно, посредством приложения отклонения напряжения, которое демонстрирует небольшое зависимое от времени варьирование по своему характеру, и, следовательно, непрерывность в оцененных значениях гарантируется, что является предпочтительным в качестве параметра управления.
Когда электрическая нагрузка прикладывается к группе 3 аккумуляторов, выходные напряжения единичных элементов 1 варьируются на большую величину, чем тогда, когда группа 3 аккумуляторов находится в состоянии отсутствия нагрузки. Согласно этому варианту осуществления наибольшее напряжение элемента и наименьшее напряжение элемента в течение периода T2 цикла дискретизации с началом со времени t3 и далее оцениваются в каждом периоде T1 цикла на основе полного выходного напряжения аккумулятора 3, детектированного в каждом периоде T1 цикла, который меньше периода цикла T2, и отклонение напряжения и отклонение внутреннего сопротивления вычисляются в каждом периоде T2 дискретизации. Как результат, варьирование в выходных напряжениях единичных элементов 1, сопровождающее варьирование в полном выходном напряжении группы 3 аккумуляторов, может выясняться точно на ранней стадии.
Предпочтительно использовать значения детектирования температурных датчиков 7, чтобы вычислять наибольшее напряжение элемента или наименьшее напряжение элемента для единичного элемента 1. Отклонение RdH2 внутреннего сопротивления наибольшего напряжения элемента и отклонение RdL2 внутреннего сопротивления наименьшего напряжения элемента варьируются в соответствии с температурой единичных элементов 1. Следовательно, если температуры, детектированные посредством температурных датчиков 7, рассматриваются при вычислении отклонения внутреннего сопротивления, наибольшее напряжение элемента или наименьшее напряжение элемента для единичных элементов 1 может вычисляться более точно.
Содержание патентного документа Tokugan 2009-121636 с датой подачи 20 мая 2009 года в Японии и Tokugan 2010-093273 с датой подачи 14 апреля 2010 года тем самым содержится в данном документе по ссылке.
Хотя изобретение описано выше в отношении конкретных вариантов осуществления, изобретение не ограничено вариантами осуществления, описанными выше. Модификации и варьирования вариантов осуществления, описанных выше, должны быть очевидными для специалистов в данной области техники в пределах объема формулы изобретения.
Варианты осуществления данного изобретения, в которых заявляется исключительное право собственности или право использования пакета, задаются следующим образом.
Область промышленного применения
Как описано выше, устройство мониторинга напряжения согласно этому изобретению является подходящим для электромобиля с гибридным приводом и электромобиля, но не ограничено этим.
Варианты осуществления данного изобретения, на которые заявляется исключительное право собственности или право использования, определяются следующей формулой изобретения.
Реферат
Изобретение относится к мониторингу аккумуляторных модулей, каждый из которых содержит множество единичных элементов. Сущность: аккумуляторный контроллер 10 выводит сигнал команды управления для дискретизации и запоминания напряжения в интегральную схему CCn, расположенную на входном конце каскадного соединения интегральных схем CC1-CCn. Интегральные схемы CC1-CCn дискретизируют и запоминают выходные напряжения единичных элементов 1, сгруппированных в аккумуляторные модули М1-Mn. Аккумуляторный контроллер 10 после подтверждения того, что сигнал команды управления для дискретизации и запоминания напряжения передан в интегральную схему СС1, расположенную на выходном конце каскадного соединения, выводит сигнал команды управления передачей в интегральную схему CCn на входном конце каскадной схемы, чтобы передавать выходные напряжения единичных элементов 1, запомненные в интегральных схемах CC1-CCn, в аккумуляторный контроллер 10. Технический результат: запаздывание во времени для времен детектирования выходных напряжений единичных элементов 1 аккумуляторных модулей М1-Мn может быть снижен. 17 з.п. ф-лы, 12 ил.
Формула
интегральные схемы, каждая из которых дискретизирует и запоминает выходное напряжение единичного элемента или единичных элементов в каждом из аккумуляторных модулей;
схему каскадной связи, которая соединяет интегральные схемы последовательно, чтобы передавать сигналы в интегральные схемы согласно порядку соединения интегральных схем, и
программируемый контроллер, подключенный к интегральной схеме, расположенной на входном конце схемы каскадной связи, и интегральной схеме, расположенной на выходном конце схемы каскадной связи относительно передачи сигналов;
при этом контроллер запрограммирован с возможностью:
выводить сигнал команды управления для дискретизации и запоминания напряжения в интегральную схему на входном конце так, что сигнал команды управления для дискретизации и запоминания напряжения передается в каждую из интегральных схем через схему каскадной связи, причем сигнал команды управления для дискретизации и запоминания напряжения управляет каждой из интегральных схем для дискретизации и запоминания выходного напряжения единичного элемента или единичных элементов в каждом из аккумуляторных модулей; и
выводить сигнал команды управления передачей в интегральную схему на входном конце так, что сигнал команды управления передачей передается через схему каскадной связи в каждую из интегральных схем после передачи сигнала команды управления для дискретизации и запоминания напряжения, причем сигнал команды управления передачей управляет каждой из интегральных схем для передачи выходного напряжения, запомненного каждой из интегральных схем, в контроллер через схему каскадной связи.
где VHb - максимальное напряжение элемента, вычисляемое с интервалами, соответствующими первому периоду цикла;
VLb - минимальное напряжение элемента, вычисляемое с интервалами, соответствующими первому периоду цикла;
Vsb - полное выходное напряжение аккумуляторных модулей, определенное с интервалами, соответствующими первому времени цикла;
VdH1 - отклонение максимального напряжения аккумулятора;
RdH2 - отклонение внутреннего сопротивления, соответствующее максимальному напряжению аккумулятора;
Ib - полный выходной ток аккумуляторных модулей, детектированный с интервалами, соответствующими первому периоду цикла;
n - число единичных элементов аккумуляторных модулей; и
RdL2 - отклонение внутреннего сопротивления, соответствующее
минимальному напряжению аккумулятора.
Документы, цитированные в отчёте о поиске
Устройство для контроля и зарядки выбранной группы элементов батареи
Комментарии