Регулятор мощности и транспортное средство, оснащенное регулятором мощности - RU2381610C1
Код документа: RU2381610C1
Чертежи























Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к регулятору мощности и транспортному средству, оснащенному регулятором, в частности оно относится к регулятору мощности, осуществляющему обмен электрической энергией между промышленным источником питания и устройством накопления энергии, установленным на транспортном средстве, а также к транспортному средству, оснащенному регулятором мощности.
Уровень техники
В выложенной заявке №4-295202 на патент Японии раскрыт электропривод, выполненный с возможностью обмена электрической энергией между источником питания переменного тока вне транспортного средства и источником питания постоянного тока, предусмотренным на транспортном средстве. Электропривод включает в себя батарею, инверторы IA и IB, асинхронные двигатели МА и МВ и блок управления. Асинхронные двигатели МА и МВ включают в себя соединенные звездой обмотки СА и СВ, соответственно. К нейтральным точкам NA и NB обмоток СА и СВ подключен входной/выходной порт через фильтр подавления электромагнитных помех. Инверторы IA и IB предусмотрены соответственно асинхронным двигателям МА и МВ и подключены к обмоткам СА и СВ, соответственно. Инверторы IA и IB подключены параллельно к батарее.
В режиме подзарядки в электроприводе электрическая энергия переменного тока, подаваемая от однофазного источника питания, подключенного к входному/выходному порту между нейтральными точками NA и NB обмоток СА и СВ, может быть преобразована в электрическую энергию постоянного тока для зарядки батареи. Кроме того, может вырабатываться электрическая энергия переменного тока, имеющая подстраиваемую синусоидальную форму на нейтральных точках NA и NB, и вырабатываемая электрическая энергия переменного тока выводится на внешнее устройство, подключенное к входному/выходному порту.
Однако в электроприводе, раскрытом в выложенной заявке №4-295202 на патент Японии, описанной выше, приведение в действие асинхронных двигателей МА и МВ должно прекращаться в режиме подзарядки. Кроме того, хотя асинхронные двигатели МА и МВ управляются при приведении в действие (в режиме приведения в действие), управление режима подзарядки невозможно.
Кроме того, хотя в этом применении раскрыта зарядка батареи с коэффициентом мощности 1 от однофазного источника питания, реализующая более эффективную зарядку батареи или подачу энергии на внешнее устройство, необходимо регулирование с более высокой точностью.
Раскрытие изобретения
Настоящее изобретение было сделано для разрешения такой проблемы, и его задачей является обеспечение регулятором мощности для обмена электрической энергией с источником питания переменного тока через нейтральные точки двух электродвигателей переменного тока, выполненным с возможностью осуществления обмена электрической энергией без влияния на управление приведением в действие электродвигателей, а также в обеспечении транспортным средством, обеспеченным таким регулятором мощности.
Другой задачей настоящего изобретения является обеспечение регулятором мощности для обмена электрической энергией с источником питания переменного тока через нейтральные точки двух электродвигателей переменного тока, выполненным с возможностью осуществления обмена электрической энергией с более высокой эффективностью, а также в обеспечении транспортным средством, обеспеченным таким регулятором мощности.
Настоящее изобретение обеспечивает регулятором мощности, выполненным с возможностью выполнения одной из зарядки устройства накопления энергии, установленного на транспортном средстве, от источника питания переменного тока вне транспортного средства и подачи энергии от устройства накопления энергии к источнику питания переменного тока, включающим в себя первую и вторую вращающиеся электрические машины переменного тока, первый и второй инверторы, пару питающих линий, первое устройство обнаружения напряжения, блок формирования командного тока и блок управления инвертором. Первая вращающаяся электрическая машина переменного тока включает в себя соединенную звездой первую многофазную обмотку в качестве статорной обмотки. Вторая вращающаяся электрическая машина переменного тока включает в себя соединенную звездой вторую многофазную обмотку в качестве статорной обмотки. Первый инвертор подключен к первой многофазной обмотке и выполняет преобразование энергии между первой вращающейся электрической машиной переменного тока и устройством накопления энергии. Второй инвертор подключен ко второй многофазной обмотке и выполняет преобразование энергии между второй вращающейся электрической машиной переменного тока и устройством накопления энергии. Пара питающих линий подключена к первой нейтральной точке первой многофазной обмотки и ко второй нейтральной точке второй многофазной обмотки и выполнена с возможностью обеспечения обмена электрической энергией между источником питания переменного тока и первой и второй нейтральными точками. Первое устройство обнаружения напряжения обнаруживает напряжение источника питания переменного тока. Блок формирования командного тока обнаруживает действующее значение и фазу источника питания переменного тока на основании обнаруженного значения напряжения с первого устройства обнаружения напряжения и на основании обнаруженных действующего значения и фазы, и на основании значения команды зарядки/разрядки энергии для устройства накопления энергии формирует командное значение тока, протекаемого в паре питающих линий, имеющего фазу, подстраиваемую относительно напряжения источника питания переменного тока. Блок управления инвертором управляет нуль-фазовым напряжением, по меньшей мере, одного первого или второго инверторов на основании значения командного тока, формируемого блоком формирования командного тока.
Предпочтительно блок формирования командного тока формирует значение командного тока такой же фазы, как и напряжения источника питания переменного тока.
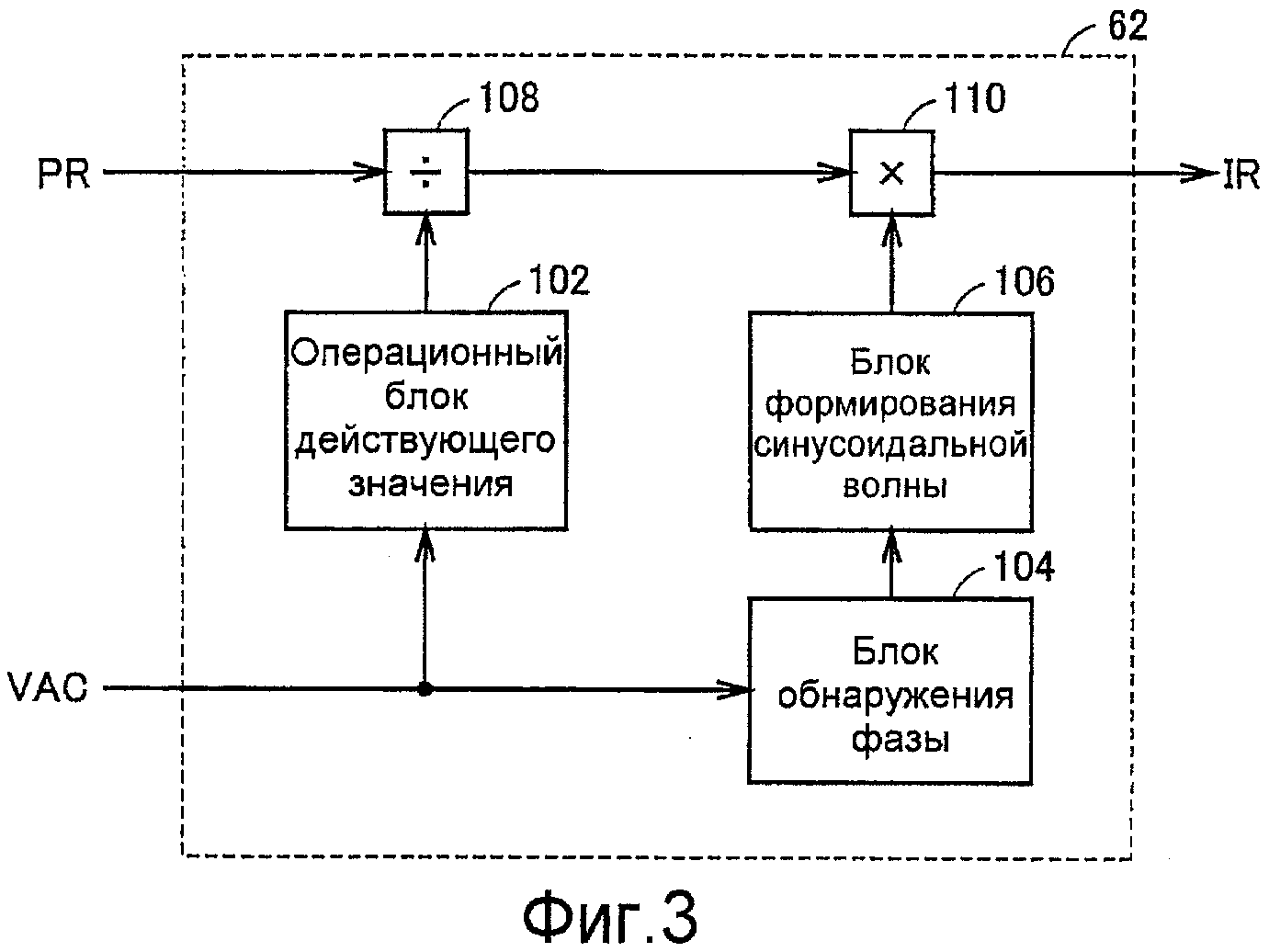
Предпочтительно блок формирования командного тока включает в себя операционный блок определения действующего значения, блок обнаружения фазы, блок формирования синусоидальной волны и операционный блок. Операционный блок действующего значения оперерирует действующим значением напряжения источника питания переменного тока на основании значения обнаруженного напряжения. Блок обнаружения фазы обнаруживает фазу напряжения источника питания переменного тока на основании значения обнаруженного напряжения. Блок формирования синусоидальной волны формирует синусоидальную волну, подстраиваемую по фазе относительно фазы, обнаруженной блоком обнаружения фазы. Операционный блок делит значения команды зарядки/разрядки энергии на действующее значение и умножает результат операции на синусоидальную волну с блока формирования синусоидальной волны для сформирования значения командного тока.
Более предпочтительно блок формирования синусоидальной волны формирует синусоидальную волну с такой же фазой, как и фаза, обнаруживаемая блоком обнаружения фазы.
Предпочтительно блок управления инвертором управляет нуль-фазовым напряжением одного из первого и второго инверторов на основании значения командного тока и поддерживает нуль-фазовое напряжение другого одного из инверторов в фиксированном значении.
Более предпочтительно блок управления инвертором выключает верхнее плечо и включает нижнее плечо из плеч соответствующих фаз другого инвертора, когда потенциал нейтральной точки, соответствующей одному инвертору, выше, чем потенциал нейтральной точки, соответствующей другому инвертору, и включает верхнее плечо и выключает нижнее плечо, когда потенциал нейтральной точки, соответствующей одному инвертору, ниже, чем потенциал нейтральной точки, соответствующей другому инвертору.
Кроме того, более предпочтительно блок управления инвертором выключает верхнее и нижнее плечи из плеч соответствующих фаз другого инвертора, когда устройство накопления энергии заряжается от источника питания переменного тока.
Более предпочтительно блок управления инвертором периодически переключает первый и второй инверторы в качестве инвертора, управляющего нуль-фазовым напряжением на основании значения командного тока.
Кроме того, более предпочтительно блок управления инвертором управляет нуль-фазовым напряжением первого и второго инверторов на основании значения командного тока так, чтобы нуль-фазовое напряжение второго инвертора достигало нуль-фазового напряжения первого инвертора с его обратным знаком.
Более предпочтительно блок управления инвертором формирует первый сигнал приведения в действие для управления переключением первого инвертора в зависимости от соотношения величины между заданной несущей волны и первой сигнальной волны, формируемой на основании значения командного тока, и формирует второй сигнал приведения в действие для управления переключением второго инвертора в зависимости от соотношения величины между несущей волны и второй сигнальной волны, получаемой инвертированием знака первой сигнальной волны.
Кроме того, более предпочтительно блок управления инвертором формирует первый сигнал приведения в действие для управления переключением первого инвертора в зависимости от соотношения величины между заданной первой несущей волны и сигнальной волны, формируемой на основании значения командного тока, и формирует второй сигнал приведения в действие для управления переключением второго инвертора в зависимости от соотношения величины между второй несущей волны, получаемой инвертированием знака первой несущей волны, и сигнальной волны.
Кроме того, более предпочтительно блок управления инвертором формирует первый сигнал приведения в действие для управления переключением первого инвертора в зависимости от соотношения величины между заданной несущей волны и сигнальной волны, формируемой на основании значения командного тока, и формирует второй сигнал приведения в действие, который изменяется дополнительно к первому сигналу приведения в действие для управления переключением второго инвертора.
Предпочтительно регулятор мощности дополнительно включает в себя первое устройство обнаружения тока. Первое устройство обнаружения тока обнаруживает ток, протекающий по паре питающих линий. Блок управления инвертором включает в себя блок регулирования тока и блок формирования сигнала приведения в действие. Блок регулирования тока формирует нуль-фазовое командное напряжение первого и второго инверторов на основании отклонения между значением обнаруженного тока с первого устройства обнаружения тока и значением командного тока. Блок формирования сигнала приведения в действие формирует сигнал приведения в действие для приведения в действие первого и второго инверторов на основании формируемого нуль-фазового командного напряжения.
Предпочтительно регулятор мощности дополнительно включает в себя множество вторых устройств обнаружения тока. Множеством устройств обнаружения тока обнаруживается ток, протекающий через соответствующие фазы каждой из первой и второй вращающихся электрических машин переменного тока. Блок управления инвертором включает в себя множество блоков регулирования тока и блок формирования сигнала приведения в действие. Множество блоков регулирования тока предусмотрено в согласовании с соответствующими фазами каждой из первой и второй вращающихся электрических машин переменного тока, и оно формирует командное напряжение соответствующей фазы соответствующего инвертора на основании отклонения между значением обнаруженного тока соответствующего второго устройства обнаружения тока и значением командного тока каждой фазы, получаемым путем равномерного распределения значения командного тока по соответствующим фазам. Блок формирования сигнала приведения в действие формирует сигнал приведения в действие для приведения в действие первого и второго инверторов на основании формируемого командного напряжения каждой фазы.
Предпочтительно блок регулирования тока или каждый из множества блоков регулирования тока включает в себя компенсирующий блок внутренней модели. Компенсирующий блок внутренней модели вычисляет размер компенсации управления с использованием синусоидальной функции волны, соответствующей значению командного тока.
Более предпочтительно компенсирующий блок внутренней модели включает в себя первый и второй операционные блоки среднего значения и операционный блок. Первый операционный блок среднего значения вычисляет среднее значение величины значения командного тока или значения командного тока каждой фазы. Второй операционный блок среднего значения вычисляет среднее значение величины значения обнаруженного тока. Операционный блок умножает отклонение между выходным сигналом с первого операционного блока среднего значения и выходным сигналом со второго операционного блока среднего значения на коэффициент усиления и дополнительно умножает результат операции на синусоидальную функцию такой же фазы, как и источника питания переменного тока, для обеспечения размера компенсации управления.
Кроме того, предпочтительно блок регулирования тока или каждый из множества блоков регулирования тока включает в себя блок повторного управления. Блок повторного управления последовательно вычисляет, для каждой фазы источника питания переменного тока, нуль-фазовое командное напряжение или командное напряжение для каждой фазы на основании отклонения последнего периода источника питания переменного тока.
Предпочтительно регулятор мощности дополнительно включает в себя второе устройство обнаружения напряжения. Второе устройство обнаружения напряжения обнаруживает напряжение постоянного тока, прикладываемое к первому и второму инверторам. Блок формирования командного тока включает в себя блок регулирования напряжения. Блок регулирования напряжения на основании отклонения между значением обнаруженного напряжения со второго устройства обнаружения напряжения и заданным напряжением напряжения постоянного тока корректирует значение команды зарядки/разрядки энергии так, что напряжение постоянного тока подстраивается к заданному значению.
Кроме того, предпочтительно регулятор мощности дополнительно включает в себя повышающий преобразователь, второе устройство обнаружения напряжения и блок управления преобразователем. Повышающий преобразователь предусмотрен между устройством накопления энергии и первым и вторым инверторами. Второе устройство обнаружения напряжения обнаруживает напряжение постоянного тока, прикладываемое к первому и второму инверторам. Блок управления преобразователем управляет повышающим преобразователем так, что напряжение постоянного тока подстраивается к заданному напряжению на основании значения обнаруженного напряжения со второго устройства обнаружения напряжения.
Более предпочтительно регулятор мощности дополнительно включает в себя третье устройство обнаружения тока. Третье устройство обнаружения тока обнаруживает входной/выходной ток устройства накопления энергии. Блок управления преобразователем включает в себя блок регулирования напряжения и блок регулирования тока. Блок регулирования напряжения выполнен с возможностью подстройки напряжения постоянного тока к заданному напряжению на основании значения обнаруженного напряжения со второго устройства обнаружения напряжения. Блок регулирования тока выполнен с возможностью подстройки входного/выходного тока устройства накопления энергии к заданному току на основании значения обнаруженного тока с третьего устройства обнаружения тока.
Более предпочтительно блок управления преобразователем останавливает повышающий преобразователь, когда отклонение между значением обнаруженного тока и заданным током превышает пороговое значение.
Кроме того, в соответствии с настоящим изобретением транспортное средство включает в себя колесо, принимающее момент приведения в действие, по меньшей мере, от одной из первой и второй вращающихся электрических машин переменного тока и любого из описанных выше регуляторов мощности.
В настоящем изобретении обмен электрической энергией между источником питания переменного тока и устройством накопления энергии осуществляется через пару питающих линий, подключенных к первой и второй нейтральным точкам. Блок формирования командного тока формирует командное значение тока, протекаемого в паре питающих линий, имеющего фазу, подстраиваемую относительно напряжения источника питания переменного тока на основании действующего значения и фазы напряжения источника питания переменного тока, определяемых на основании значения обнаруженного напряжения с первого устройства обнаружения напряжения и на основании значения команды зарядки/разрядки энергии для устройства накопления энергии. В частности, блок формирования командного тока формирует значение командного тока не на основании обнаруживаемой формы напряжения источника питания переменного тока, которое может включать в себя гармоники или колебательную составляющую, а путем обнаружения фазы и действующего значения напряжения источника питания переменного тока и использования синусоидальной формы только основной волны. Поэтому может быть сформировано значение командного тока, свободного от любой гармонической составляющей или колебательной составляющей источника питания переменного тока и позволяющего осуществлять зарядку или подачу энергии с коэффициентом мощности 1 относительно источника питания переменного тока. Блок управления инвертором управляет первым и вторым инверторами на основании таким образом сформированного значения командного тока, и поэтому генерация недействующей электрической мощности или гармонического тока, обусловленного гармонической составляющей или колебательной составляющей, может быть предотвращена.
Таким образом, в настоящем изобретении реализуются эффективная зарядка устройства накопления энергии от источника питания переменного тока и подача энергии от устройства накопления энергии к источнику питания переменного тока. Кроме того, даже в случае, когда уровень напряжения источника питания переменного тока переключают, можно гарантировать электрическую мощность, которая соответствует установленному командному значению зарядки/разрядки электрической энергии. В частности, постоянная мощность зарядки и постоянная мощность подачи могут быть получены без необходимости изменения в системе или настройки в различных странах с различными уровнями напряжения промышленного источника питания. Кроме того, могут быть предотвращены потери и генерация недействующей электрической мощности, обусловленные гармониками и колебательной составляющей, и поэтому можно реализовать высокодействующее и малогабаритное устройство.
Кроме того, блок управления инвертором управляет нуль-фазовым напряжением, по меньшей мере, одного из первого и второго инверторов на основании значения командного тока, и поэтому управление не влияет на вращающий момент первой и второй вращающихся электрических машин переменного тока. Таким образом, в соответствии с настоящим изобретением управление мощностью источника питания переменного тока возможно без влияния на управление вращающим моментом первой и второй вращающихся электрических машин переменного тока. В частности, можно заряжать устройство накопления энергии от источника питания переменного тока и подавать энергию от устройства накопления энергии к источнику питания переменного тока в то время, когда первая и вторая вращающиеся электрические машины переменного тока приведены в действие.
Кроме того, в соответствии с настоящим изобретением для зарядки устройства накопления энергии от источника питания переменного тока и для подачи энергии от устройства накопления энергии к источнику питания переменного тока используются многофазные обмотки первой и второй вращающихся электрических машин переменного тока и первый и второй инверторы. Поэтому нет необходимости предусматривать специальный преобразователь энергии для преобразования энергии между источником питания переменного тока и устройством накопления энергии. В соответствии с этим, в настоящем изобретении уменьшено число дополнительных компонентов.
Краткое описание чертежей
На чертежах:
фиг.1 - общая структурная схема гибридного транспортного средства, иллюстрирующая пример транспортного средства согласно первому варианту осуществления настоящего изобретения;
фиг.2 - функциональная схема электронного блока управления, показанного на фиг.1;
фиг.3 - подробная функциональная схема блока формирования командного тока, показанного на фиг.2;
фиг.4 - подробная функциональная схема блока управления инверторами, показанного на фиг.2;
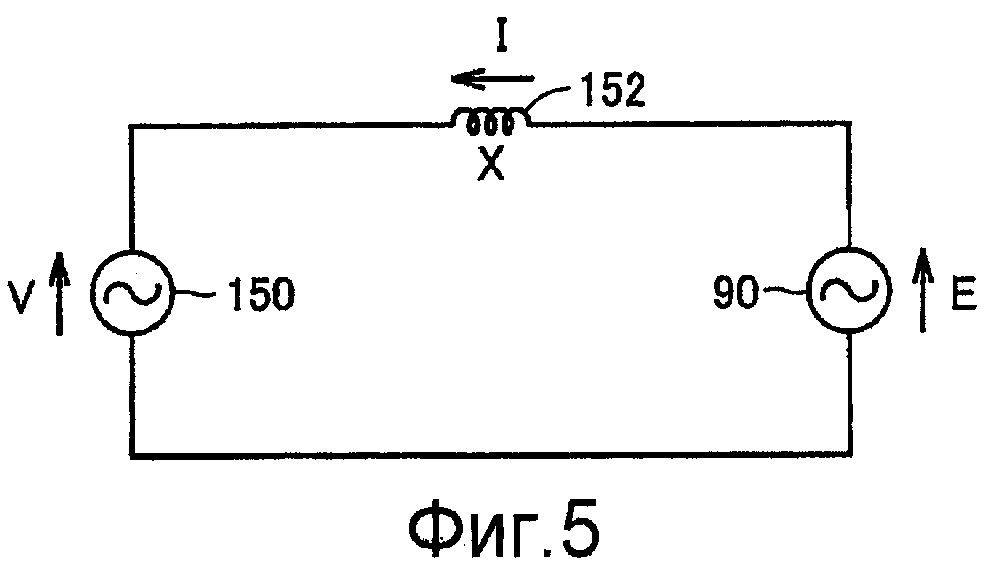
фиг.5 - нуль-фазовая эквивалентная схема инвертора и двигатель-генератора, показанных на фиг.1;
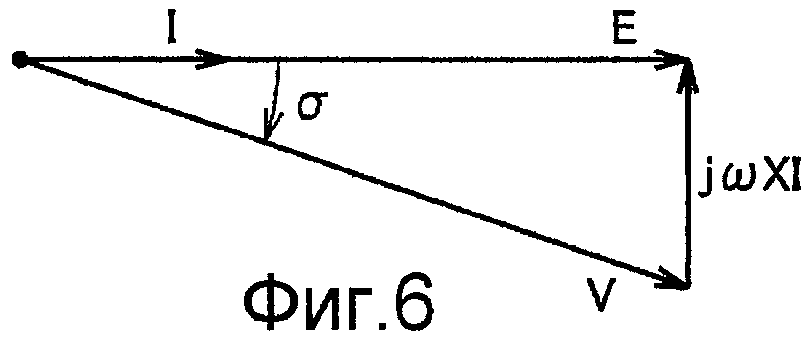
фиг.6 - векторная диаграмма, создающая коэффициент мощности 1, когда устройство накопления энергии заряжается от промышленного источника питания, в соответствии с нуль-фазовой эквивалентной схемой из фиг.5;
фиг.7 - векторная диаграмма, создающая коэффициент мощности 1, когда энергия подается от устройства накопления энергии к промышленному источнику питания, в соответствии с нуль-фазовой эквивалентной схемой из фиг.5;
фиг.8 - иллюстрация направлений напряжения промышленного источника питания и тока, протекающего по питающим линиям, а также зависимости между зарядкой устройства накопления энергии от промышленного источника питания и подачей энергии к промышленному источнику питания от устройства накопления энергии;
фиг.9 - первая схема, отображающая протекание тока, когда устройство накопления энергии заряжается от промышленного источника питания;
фиг.10 - вторая схема, отображающая протекание тока, когда устройство накопления энергии заряжается от промышленного источника питания;
фиг.11 - третья схема, отображающая протекание тока, когда устройство накопления энергии заряжается от промышленного источника питания;
фиг.12 - четвертая схема, отображающая протекание тока, когда устройство накопления энергии заряжается от промышленного источника питания;
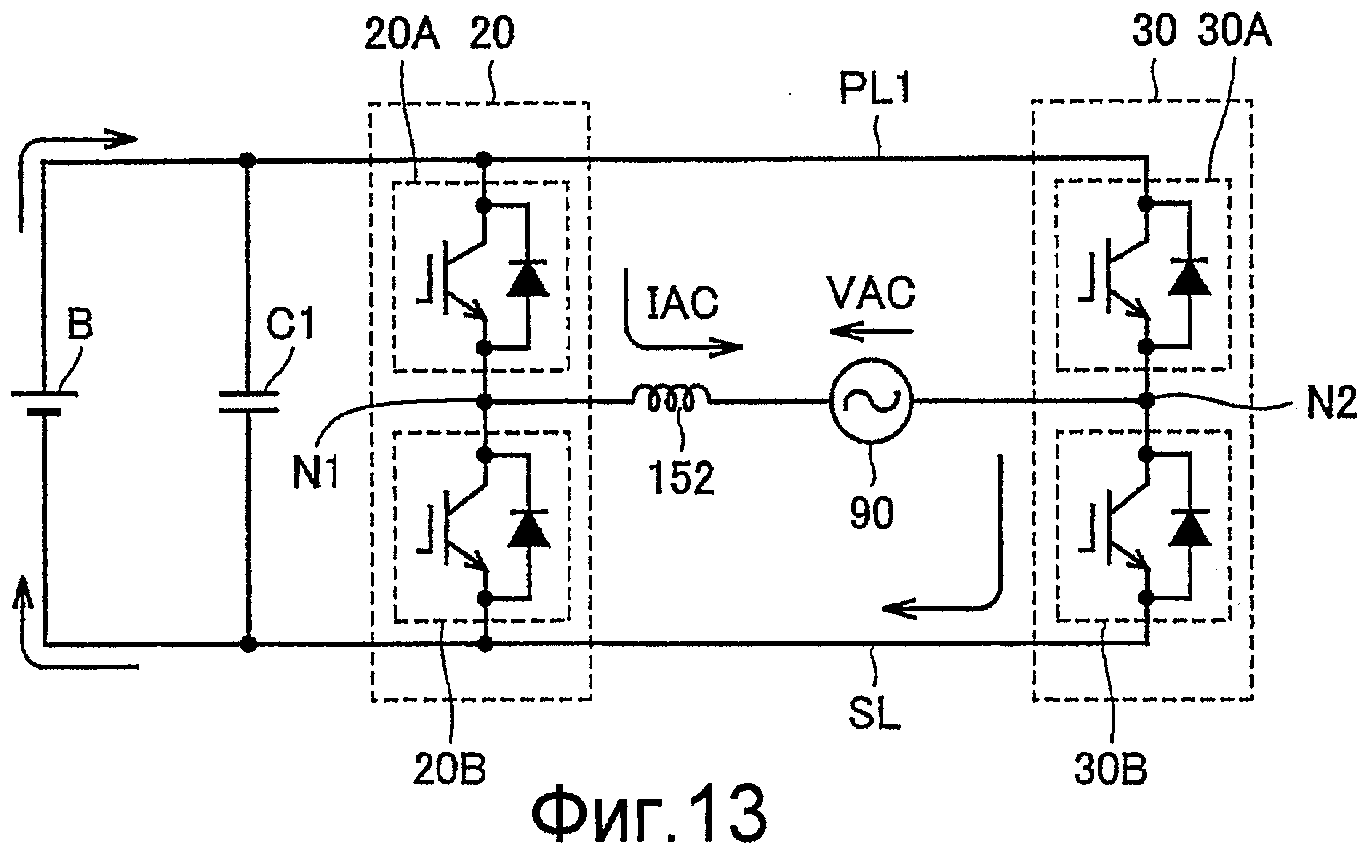
фиг.13 - первая схема, отображающая протекание тока, когда энергия подается к промышленному источнику питания от устройства накопления энергии;
фиг.14 - вторая схема, отображающая протекание тока, когда энергия подается к промышленному источнику питания от устройства накопления энергии;
фиг.15 - подробная структурная схема блока управления инвертором согласно второму варианту осуществления;
фиг.16 - временная диаграмма форм сигналов, формируемых блоком управления инвертором, показанным на фиг.15, и разности напряжений на нейтральных точках, образующейся в ответ на сигналы;
фиг.17 - временная диаграмма форм сигналов с широтно-импульсной модуляцией сигналов, формируемых согласно первой модификации второго варианта осуществления, и разности напряжений на нейтральных точках, образующейся в ответ на сигналы с широтно-импульсной модуляцией сигналов;
фиг.18 - временная диаграмма форм сигналов с широтно-импульсной модуляцией сигналов, формируемых согласно второй модификации второго варианта осуществления, и разности напряжений на нейтральных точках, образующейся в ответ на сигналы с широтно-импульсной модуляцией сигналов;
фиг.19 - структурная алгоритмическая схема, отображающая конфигурацию блока регулирования тока согласно третьему варианту осуществления;
фиг.20 - структурная алгоритмическая схема, отображающая пример конфигурации компенсирующего блока внутренней модели из фиг.19;
фиг.21 - структурная алгоритмическая схема, отображающая другой пример конфигурации компенсирующего блока внутренней модели из фиг.19;
фиг.22 - иллюстрация искажения формы сигнала, периодически возникающего вследствие влияния "мертвого" времени инвертора;
фиг.23 - структурная алгоритмическая схема, отображающая конфигурацию блока регулирования тока согласно четвертому варианту осуществления;
фиг.24 - подробная функциональная схема блока управления инвертором согласно пятому варианту осуществления;
фиг.25 - подробная функциональная схема блока формирования командного тока согласно шестому варианту осуществления;
фиг.26 - общая структурная схема гибридного транспортного средства, показанного в качестве примера транспортного средства согласно седьмому варианту осуществления настоящего изобретения;
фиг.27 - функциональная схема электронного блока управления, показанного на фиг.26;
фиг.28 - подробная функциональная схема блока управления преобразователем, показанного на фиг.27;
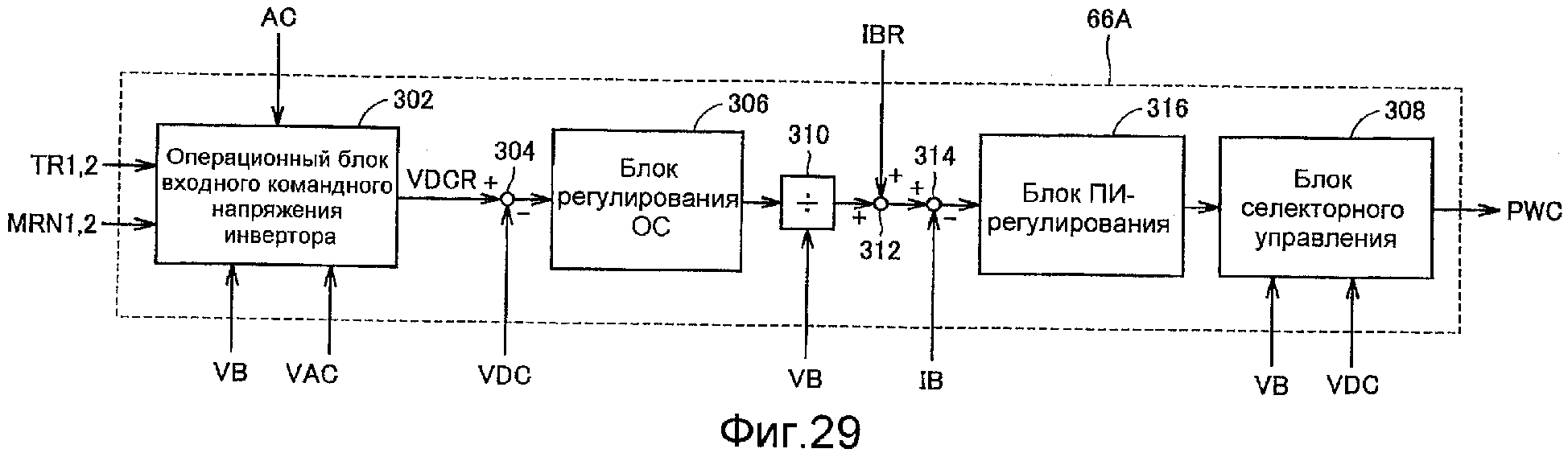
фиг.29 - подробная функциональная схема блока управления преобразователем согласно восьмому варианту осуществлению; и
фиг.30 - подробная функциональная схема блока управления преобразователем согласно девятому варианту осуществлению.
Лучшие варианты осуществления изобретения
В последующем, варианты осуществления настоящего изобретения будут описаны подробно со ссылками на фигуры. На всех фигурах одинаковые или аналогичные участки обозначаются одними и теми позициями, а описание их не повторяется.
Первый вариант осуществления
На фиг.1 представлена общая структурная схема гибридного транспортного средства, показанного в качестве примера транспортного средства согласно первому варианту осуществления настоящего изобретения. Что касается фиг.1, то гибридное транспортное средство 100 включает в себя двигатель 4, двигатель-генераторы MG1 и MG2, устройство 3 разделения мощности и колеса 2. Гибридное транспортное средство 100 также включает в себя устройство В накопления энергии, инверторы 20 и 30 и электронный блок 60 управления.
Кроме того, гибридное транспортное средство 100 включает в себя конденсатор С1, питающую линию PL1, земляную линию SL, линии UL1 и UL2 фазы U, линии VL1 и VL2 фазы V, линии WL1 и WL2 фазы W, датчик 72 напряжения и датчики 82 и 84 тока. Гибридное транспортное средство 100 дополнительно включает в себя питающие линии NL1 и NL2, соединитель 50, конденсатор С2, датчик 74 напряжения и датчик 86 тока.
Движение гибридного транспортного средства 100 осуществляется при использовании двигателя 4 и двигатель-генератора MG2 в качестве источников энергии. Устройство 3 разделения мощности соединено с двигателем 4 и двигатель-генераторами MG1 и MG2 и распределяет мощность среди них. Например, планетарный зубчатый механизм, имеющий три вращающихся вала солнечной шестерни, водило планетарной передачи и кольцевое зубчатое колесо, может быть использован в качестве устройства 3 разделения мощности. Эти три вращающихся вала соответственно соединены с соответствующими вращающимися валами двигателя 4 и двигатель-генераторов MG1 и MG2. Например, можно механически соединить двигатель 4 и двигатель-генераторы MG1 и MG2 с устройством 3 разделения мощности путем выполнения ротора двигатель-генератора MG1 полым и пропускания коленчатого вала двигателя 4 через его центровое отверстие.
Вращающийся вал двигатель-генератора MG2 соединен с колесом 2 посредством непоказанных редуктора или дифференциала. Кроме того, редукторный механизм для вращающегося вала двигатель-генератора MG2 также может быть встроен внутрь устройства 3 разделения мощности.
Двигатель-генератор MG1 включен в состав гибридного транспортного средства 100 в качестве генератора, приводимого в действие двигателем 4, и в качестве электродвигателя, который может запускать в ход двигатель 4. Двигатель-генератор MG2 включен в состав гибридного транспортного средства 100 в качестве электродвигателя, приводящего в действие колесо 2.
Положительный электрод и отрицательный электрод устройства В накопления энергии подключены соответственно к питающей линии PL1 и земляной линии SL. Конденсатор С1 подключен между питающей линией PL1 и земляной линией SL. Инвертор 20 включает в себя плечо 22 фазы U, плечо 24 фазы V и плечо 26 фазы W. Плечо 22 фазы U, плечо 24 фазы V и плечо 26 фазы W включены параллельно между питающей линией PL и земляной линией SL. Плечо 22 фазы U включает в себя последовательно соединенные n-p-n транзисторы Q11 и Q12, плечо 24 фазы V включает в себя последовательно соединенные n-p-n транзисторы Q13 и Q14 и плечо 26 фазы W включает в себя последовательно соединенные n-p-n транзисторы Q15 и Q16. Между коллектором и эмиттером n-p-n транзисторов с Q11 по Q16 включены диоды с D11 по D16, соответственно, для осуществления протекания тока со стороны эмиттера к стороне коллектора.
В качестве рассмотренных выше n-p-n транзисторов и других n-p-n транзисторов, которые будут рассмотрены в описании впоследствии, могут быть использованы биполярные транзисторы с изолированным затвором (IGBT). Кроме того, вместо n-p-n транзистора может быть использован силовой переключающий элемент, такой как силовой полевой транзистор со структурой металл-оксид-полупроводник (MOSFET).
Двигатель-генератор MG1 включает в себя трехфазную обмотку 12 в качестве статорной обмотки. Обмотка U1 фазы U, обмотка V1 фазы V и обмотка W1 фазы W, образующие трехфазную обмотку, имеют один конец, соединенный друг с другом для образования нейтральной точки N1, и обмотка U1 фазы U, обмотка V1 фазы V и обмотка W1 фазы W имеют другой конец, подключенный к узлам между верхними и нижними плечами n-p-n транзисторов плеча 22 фазы U, плеча 24 фазы V и плеча 26 фазы W инвертора 20, соответственно.
Инвертор 30 включает в себя плечо 32 фазы U, плечо 34 фазы V и плечо 36 фазы W. Двигатель-генератор MG2 включает в себя трехфазную обмотку 14 в качестве статорной обмотки. Инвертор 30 и двигатель-генератор MG2 имеют такую же структуру, как инвертор 20 и двигатель-генератор MG1, соответственно.
Питающая линия NL1 имеет один конец, подключенный к нейтральной точке N1 трехфазной обмотки 12, и другой конец, подключенный к соединителю 50. Питающая линия NL2 имеет один конец, подключенный к нейтральной точке N2 трехфазной обмотки 14, и другой конец, подключенный к соединителю 50. Конденсатор С2 включен между питающими линиями NL1 и NL2.
Устройство В накопления энергии представляет собой перезаряжаемый источник питания постоянного тока, такой как никель-металлогидридная или литий-ионная вторичная батарея. Устройство В накопления энергии отдает энергию постоянного тока конденсатору С1, а заряжается с помощью инвертора 20 и/или 30. Заявитель отмечает, что в качестве устройства В накопления энергии может быть использован конденсатор большой емкости.
Конденсатор С1 сглаживает колебание напряжения между питающей линией PL1 и земляной линией SL. Датчик 72 напряжения обнаруживает напряжение между выводами конденсатора С1, то есть напряжение VDC питающей линии PL1 относительно земляной линии SL, и выводит обнаруженное напряжение VDC на электронный блок управления 60.
В соответствии с сигналом PWM1 (с широтно-импульсной модуляцией) с электронного блока 60 управления инвертор 20 преобразует напряжение постоянного тока, принимаемое с конденсатора С1, в трехфазное напряжение переменного тока и выводит преобразованное трехфазное напряжение переменного тока на двигатель-генератор MG1. Кроме того, инвертор 20 преобразует трехфазное напряжение переменного тока, генерируемое двигатель-генератором MG1, принимающим энергию с двигателя 4, в напряжение постоянного тока в соответствии с сигналом PWM1 с электронного блока 60 управления и выводит преобразованное напряжение постоянного тока на питающую линию PL1.
В соответствии с сигналом PWM2 с электронного блока 60 управления инвертор 30 преобразует напряжение постоянного тока, принимаемое с конденсатора С1, в трехфазное напряжение переменного тока и выводит преобразованное трехфазное напряжение переменного тока на двигатель-генератор MG2. Кроме того, инвертор 30 преобразует трехфазное напряжение переменного тока, генерируемое двигатель-генератором MG2, принимающим вращающее усилие от колеса 2 во время рекуперативного торможения транспортного средства, в напряжение постоянного тока в соответствии с сигналом PWM2 с электронного блока 60 управления и выводит преобразованное напряжение постоянного тока на питающую линию PL1.
В данном случае, когда энергия переменного тока подводится от промышленного источника 90 питания, подключенного к соединителю 50 посредством соединителя 92, инверторы 20 и 30 преобразуют способом, который будет описан впоследствии, энергию переменного тока, подводимую от промышленного источника 90 питания по питающим линиям NL1 и NL2 к нейтральным точкам N1 и N2, в энергию постоянного тока, и энергия выводится на питающую линию PL1 для зарядки устройства В накопления энергии. Когда требуется подавать энергию с устройства В накопления энергии на промышленный источник 90 питания, инверторы 20 и 30 преобразуют энергию постоянного тока с устройства В накопления энергии в энергию переменного тока и выводят ее с нейтральных точек N1 и N2 по питающим линиям NL1 и NL2 к промышленному источнику 90 питания.
Конденсатор С2 исключает влияние пульсации на промышленный источник 90 питания, подключенный к соединителю 50. Датчик 74 напряжения обнаруживает напряжение VAC на питающих линиях NL1 и NL2 и выводит значение обнаруженного напряжения VAC на электронный блок 60 управления. Датчик 86 тока обнаруживает ток IAC, протекающий по питающей линии NL2, и выводит значение обнаруженного тока IAC на электронный блок 60 управления. Отмечено, что ток, протекающий по питающей линии NL1, может быть обнаружен датчиком 86 тока.
Каждый из двигатель-генераторов MG1 и MG2 представляет собой вращающуюся электрическую машину трехфазного переменного тока, реализованную, например, посредством синхронного двигатель-генератора трехфазного переменного тока. Двигатель-генератор MG1 приводится в действие для рекуперации с помощью инвертора 20 и выводит трехфазное напряжение переменного тока, генерируемое с использованием энергии двигателя 4 на инвертор 20. Кроме того, двигатель-генератор MG1 приводится в действие для выработки энергии инвертором 20 при пуске двигателя 4, достигаемое проворачиванием коленчатого вала двигателя 4. Двигатель-генератор MG2 приводится в действие для выработки энергии инвертором 30 и генерирует энергию для приведения в действие колеса 2. Кроме того, во время рекуперативного торможения транспортного средства двигатель-генератор MG2 приводится в действие для рекуперации инвертором 30 и выводит трехфазное напряжение переменного тока, генерируемое с использованием вращающего момента, принимаемого от колеса 2 на инвертор 30.
Датчик 82 тока обнаруживает ток I1 электродвигателя, протекающий через обмотки соответствующих фаз двигатель-генератора MG1, и выводит значение обнаруженного тока I1 электродвигателя на электронный блок 60 управления. Датчик 84 тока обнаруживает ток I2 электродвигателя, протекающий через обмотки соответствующих фаз двигатель-генератора MG2, и выводит значение обнаруженного тока I2 электродвигателя на электронный блок 60 управления.
Электронный блок 60 управления формирует сигналы PWM1 и PWM2 для приведения в действие инверторов 20 и 30, соответственно, и выводит сформированные сигналы PWM1 и PWM2 на инверторы 20 и 30, соответственно.
Когда соединитель 92 промышленного источника 90 питания подключен к соединителю 50 и на основании сигнала АС требуется зарядка устройства В накопления энергии от промышленного источника 90 питания, электронный блок 60 управления осуществляет управление инверторами 20 и 30 так, что энергия переменного тока, подводимая от промышленного источника 90 питания к нейтральным точкам N1 и N2, преобразуется в энергию постоянного тока для зарядки устройства В накопления энергии способом, который будет описан впоследствии.
Когда соединитель 92 промышленного источника 90 питания подключен к соединителю 50 и на основании сигнала АС требуется подача энергии от устройства В накопления энергии к промышленному источнику 90 питания, электронный блок 60 управления осуществляет управление инверторами 20 и 30 так, что энергия постоянного тока с устройства В накопления энергии преобразуется в энергию переменного тока и выводится с нейтральных точек N1 и N2 к промышленному источнику 90 питания способом, который будет описан впоследствии.
Сигнал АС представляет собой сигнал, требующий зарядки устройства В накопления энергии от промышленного источника 90 питания или подачи энергии от устройства В накопления энергии к промышленному источнику 90 питания, и при операциях пользователя, например с устройством ввода (непоказанного, как и в дальнейшем), для выдачи команд на зарядку устройства В накопления энергии или подачу энергии к промышленному источнику 90 питания, сигнал изменяется в соответствии с требованием.
На фиг.2 представлена функциональная схема электронного блока 60 управления, показанного на фиг.1. Что касается фиг.2, то электронный блок 60 управления включает в себя блок 62 формирования командного тока и блок 64 управления инверторами. На основании значения PR команды зарядки/разрядки энергии, принимаемой с электронного блока управления транспортного средства (непоказанного, как и в дальнейшем), и на основании напряжения VAC с датчика 74 напряжения блок 62 формирования командного тока формирует командный ток IR для подачи энергии к промышленному источнику 90 питания или зарядки устройства В накопления энергии с коэффициентом мощности 1 относительно промышленного источника 90 питания. В данном случае значение PR команды зарядки/разрядки энергии может отражать значение команды энергии для зарядки устройства В накопления энергии, когда устройство В накопления энергии заряжается от промышленного источника 90 питания, и значение команды энергии для разрядки устройства В накопления энергии, когда энергия подается с устройства В накопления энергии к промышленному источнику 90 питания.
На основании значений TR1 и TR2 управления вращающим моментом двигатель-генераторов MG1 и MG2, принимаемых с электронного блока управления транспортного средства, токов I1 и I2 электродвигателей с датчиков 82 и 84 тока, напряжения VDC с датчика 72 напряжения, тока IA с датчика тока, сигнала АС и командного тока IR с блока 62 формирования командного тока блок 64 управления инверторами формирует сигнал PWM1 для включения/выключения n-p-n транзисторов с Q11 по Q16 инвертора 20 и сигнал PWM2 для включения/выключения n-p-n транзисторов с Q21 по Q26 инвертора 30 и выводит сформированные сигналы PWM1 и PWM2 на инверторы 20 и 30, соответственно.
На фиг.3 представлена подробная функциональная схема блока 62 формирования командного тока, показанного на фиг.2. Что касается фиг.3, то блок 62 формирования командного тока включает в себя операционный блок 102 действующего значения, блок 104 обнаружения фазы, блок 106 формирования синусоидальной волны, блок 108 деления и блок 110 умножения. Операционный блок 102 действующего значения обнаруживает пиковое напряжение напряжения VAC и на основании обнаруженного пикового напряжения вычисляет действующее значение напряжения VAC. Блок 104 обнаружения фазы обнаруживает точку перехода через нуль напряжения VAC и на основании обнаруженной точки перехода через нуль определяет фазу напряжения VAC.
Блок 106 формирования синусоидальной волны на основании фазы напряжения VAC, обнаруженной блоком 104 обнаружения фазы, генерирует синусоидальную волну такой же фазы, как и напряжение VAC. Например, блок 106 формирования синусоидальной волны может формировать синусоидальную волну такой же фазы, как и напряжение VAC, на основании фазы с блока 104 обнаружения фазы с использованием таблицы синусоидальной функции.
Блок 108 деления осуществляет деление значения PR команды зарядки/разрядки энергии на действующее значение напряжения VAC с операционного блока 102 действующего значения и выводит результат деления на блок 110 умножения. Блок 110 умножает результат операции блока 108 деления на синусоидальную волну с блока 106 формирования синусоидальной волны и выводит результат операции в качестве командного тока IR.
Командный ток IR, генерируемый таким образом, не включает в себя никакой гармонической составляющей или колебательной составляющей промышленного источника 90 питания. Поэтому, когда инверторы 20 и 30 управляются на основании командного тока IR, неэффективная электрическая мощность или гармонический ток, соответствующий гармонической составляющей или колебательной составляющей промышленного источника 90 питания, не генерируются. Кроме того, командный ток IR находится в фазе с промышленным источником 90 питания при коэффициенте мощности 1 относительно напряжения промышленного источника 90 питания. Это обеспечивает эффективную зарядку устройства В накопления энергии от промышленного источника 90 питания или эффективную подачу мощности с устройства В накопления энергии к промышленному источнику 90 питания.
Кроме того, можно добавить функцию компенсации недействующей мощности для управления недействующей мощностью путем подстройки фазы синусоидальной волны, формируемой на основании фазы напряжения VAC, относительно напряжения VAC.
На фиг.4 представлена подробная функциональная схема блока 64 управления инвертором, показанного на фиг.2. Что касается фиг.4, то блок 64 управления инвертором включает в себя операционные блоки 112 и 114 фазовых напряжений для управления электродвигателем, блок 116 вычитания, блок 118 регулирования тока, блок 120 суммирования и блоки 122 и 124 широтно-импульсного управления PWM. Операционный блок 112 фазового напряжения для управления электродвигателем вычисляет командное напряжение, подводимое к обмотке каждой фазы двигатель-генератора MG1, на основании значения TR1 управления вращающим моментом и тока I1 электродвигателя двигатель-генератора MG1 и на основании напряжения VDC, и выводит вычисленное командное напряжение для каждой фазы на блок 120 суммирования.
Блок 116 вычитания осуществляет вычитание тока IAC из командного тока IR, принимаемого с блока 62 формирования командного тока, и выводит результат операции на блок 118 регулирования тока. Когда сигнал АС является активным, блок 118 регулирования тока формирует нуль-фазовое командное напряжение Е0 в продолжение отслеживания током IAC командного тока IR на основании отклонения между командным током IR и током IAC и выводит образованное нуль-фазовое командное напряжение Е0 на блок 120 суммирования. В блоке 118 регулирования тока используется, например, пропорционально-интегральное регулирование (ПИ-регулирование). Когда сигнал АС является неактивным, блок 118 регулирования тока не активизирован и выводится нуль-фазовое командное напряжение, равное 0.
Блок 120 суммирования командного напряжения для каждой фазы с операционного блока 112 фазового тока для управления электродвигателем суммирует с нуль-фазовым командным напряжением Е0 с блока 118 регулирования тока и выводит результат операции на блок 122 широтно-импульсного управления PWM. Блок 122 широтно-импульсного управления PWM формирует сигнал PWM1 для фактического включения/выключения каждого из n-p-n транзисторов с Q11 по Q16 инвертора 20 и выводит сформированный сигнал PWM1 на каждый из n-p-n транзисторов с Q11 по Q16 инвертора 20.
Нуль-фазовое командное напряжение Е0 с блока 118 регулирования тока суммируется с командным напряжением каждой фазы, и, следовательно, само нуль-фазовое командное напряжение Е0 не содействует вращающему моменту двигатель-генератора MG1. Поэтому зарядка устройства В накопления энергии от промышленного источника 90 питания или подача энергии с устройства В накопления энергии к промышленному источнику 90 питания может регулироваться без влияния регулирования вращающего момента двигатель-генератора MG1 на основании командного напряжения каждой фазы с операционного блока 112 фазового напряжения для управления электродвигателем.
Операционный блок 114 фазового напряжения для управления электродвигателем осуществляет вычисление командного напряжения, прикладываемого к обмотке каждой фазы двигатель-генератора MG2, на основании значения TR2 управления вращающего момента и тока I2 двигатель-генератора MG2 и на основании напряжения VDC, и выводит вычисленное командное напряжение для каждой фазы на блок 124 широтно-импульсного управления PWM.
На основании командного напряжения для каждой фазы с операционного блока 114 фазового напряжения для управления электродвигателем блок 124 широтно-импульсного управления PWM формирует сигнал PWM2 для фактического включения/выключения каждого из n-p-n транзисторов с Q21 по Q26 инвертора 30 и выводит сформированный сигнал PWM2 на каждый из n-p-n транзисторов с Q21 по Q26 инвертора 30.
В изложенном выше нуль-фазовое командное напряжение Е0 суммируется с командным напряжением каждой фазы с операционного блока 112 фазового напряжения для управления электродвигателем, и поэтому потенциал нейтральной точки N1 трехфазной обмотки 12, соответствующей инвертору 20, колеблется в соответствии с нуль-фазовым командным напряжением Е0.
В изложенном выше нуль-фазовое командное напряжение Е0 может быть суммировано с командным напряжением каждой фазы с операционного блока 114 фазового напряжения для управления электродвигателем. В этом случае потенциал нейтральной точки N2 трехфазной обмотки 14, соответствующий инвертору 30, колеблется в соответствии с нуль-фазовым командным напряжением Е0. В этом случае нуль-фазовое командное напряжение Е0 не содействует вращающему моменту двигатель-генератора MG2. Поэтому зарядка устройства В накопления энергии от промышленного источника 90 питания или подача энергии с устройства В накопления энергии к промышленному источнику 90 питания могут регулироваться без влияния регулирования вращающего момента двигатель-генератора MG2 на основании командного напряжения каждой фазы с операционного блока 114 фазового напряжения для управления электродвигателем.
На фиг.5 представлена нуль-фазовая эквивалентная схема инверторов 20 и 30 и двигатель-генераторов MG1 и MG2, показанных на фиг.1. Источник 150 питания образован инверторами 20 и 30, а напряжение V представляет собой напряжение на нейтральных точках N1 и N2. Напряжение Е представляет собой напряжение промышленного источника 90 питания. Кроме того, импеданс 152 представляет собой сумму импеданса утечки двигатель-генераторов MG1 и MG2 и импеданса на стороне промышленного источника 90 питания, величина которого равна X. Ток I представляет собой ток, протекающий между инверторами 20 или 30 и промышленным источником 90 питания, и он соответствует току IAC, рассмотренному выше.
На фиг.6 представлена векторная диаграмма, в соответствии с которой реализуется коэффициент мощности 1 в нуль-фазовой эквивалентной схеме, показанной на фиг.5 во время зарядки устройства В накопления энергии от промышленного источника 90 питания. Что касается фиг.6, то вектор Е представляет собой вектор напряжения промышленного источника 90 питания. Вектор I представляет собой вектор тока, протекающего между инвертором 20 или 30 и промышленным источником 90 питания. Вектор jωXI представляет собой вектор напряжения, полученный из импеданса 152. Вектор V представляет собой вектор напряжения на нейтральных точках N1 и N2.
При регулировании напряжения V на нейтральных точках N1 и N2 для получения задержанной фазы относительно напряжения Е промышленного источника 90 питания реализуется операция зарядки с получением энергии от промышленного источника 90 питания. На основании показанного соотношения векторов видно, что при регулировании напряжения V на нейтральных точках N1 и N2 для получения фазы, задержанной на значение σ от фазы напряжения Е промышленного источника 90 питания, становится возможной зарядка с коэффициентом мощности 1 от промышленного источника 90 питания.
На фиг.7 представлена векторная диаграмма, в соответствии с которой реализуется коэффициент мощности 1 во время подачи энергии с устройства В накопления энергии к промышленному источнику 90 питания в нуль-фазовой эквивалентной схеме, показанной на фиг.5. Что касается фиг.7, то при регулировании напряжения V на нейтральных точках N1 и N2 для получения опережающей фазы от напряжения Е промышленного источника 90 питания реализуется операция подачи энергии для вывода электрической энергии к промышленному источнику 90 питания. Как видно по соотношению векторов, при регулировании напряжения V на нейтральных точках N1 и N2 для получения фазы, опережающей на значение σ фазу напряжения Е промышленного источника питания, становится возможной подача энергии с коэффициентом мощности 1 к промышленному источнику 90 питания.
Далее будет описано протекание тока по время зарядки от промышленного источника 90 питания к устройству В накопления энергии и во время подачи энергии от устройства В накопления энергии к промышленному источнику 90 питания.
На фиг.8 показаны направления напряжения VAC промышленного источника 90 питания и тока IAC, протекающего по питающим линиям NL1 и NL2, а также соответствие между зарядкой устройства В накопления энергии от промышленного источника 90 питания и передачей энергии от устройства В накопления энергии к промышленному источнику 90 питания. Что касается фиг.8, то, когда потенциал питающей линии NL1 выше, чем потенциал питающей линии NL2, напряжение VAC полагается положительным. Кроме того, когда ток протекает от нейтральной точки N1 к питающей линии NL1 (когда ток протекает от питающей линии NL2 к нейтральной точке N2), ток IAC полагается положительным.
Когда напряжение VAC и ток IAC являются положительными, энергия питает промышленный источник 90 питания (подача энергии), и это состояние в дальнейшем будет относиться к «первому квадранту». Когда напряжение VAC является отрицательным, а ток IAC является положительным, энергия отбирается от промышленного источника 90 питания (зарядка), и это состояние в дальнейшем будет относиться ко «второму квадранту».
Кроме того, когда напряжение VAC и ток IAC являются отрицательными, энергия питает промышленный источник 90 питания (подача энергии), и это состояние в дальнейшем будет относиться к «третьему квадранту». Когда напряжение VAC является положительным, а ток IAC является отрицательным, энергия отбирается от промышленного источника 90 питания (зарядка), и это состояние в дальнейшем будет относиться к «четвертому квадранту».
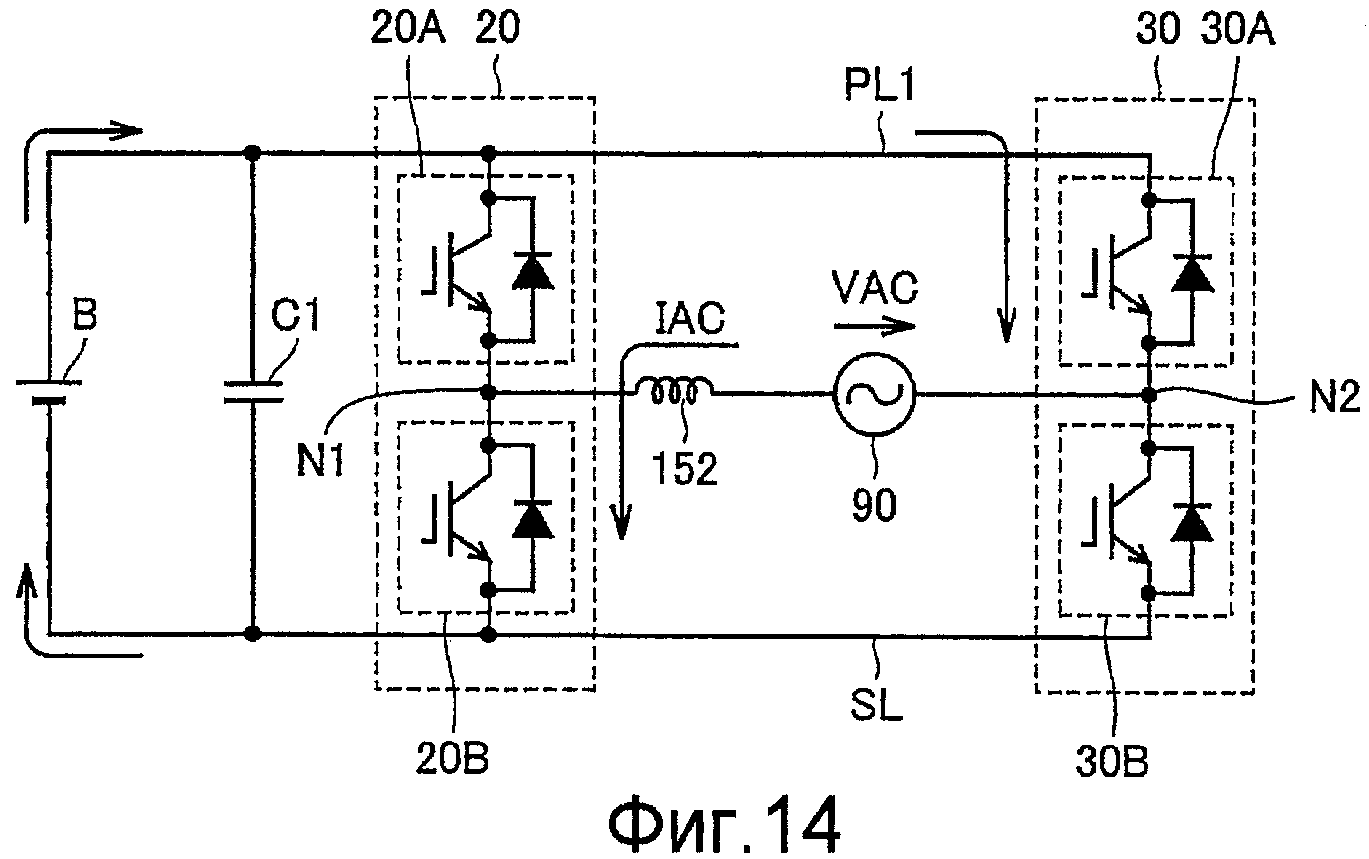
На фигурах с 9 по 12 показано протекание тока, когда устройство В накопления энергии заряжается от промышленного источника 90 питания. На фигурах с 9 по 12 и на фигурах 13 и 14, иллюстрирующих протекание тока, когда энергия подается от устройства В накопления энергии к промышленному источнику 90 питания, что будет описано впоследствии, показаны нуль-фазовые эквивалентные схемы инверторов 20 и 30 и двигатель-генераторов MG1 и MG2 из фиг.1. В случае нуль-фазовой эквивалентной схемы в каждом из инверторов 20 и 30 три транзистора верхнего плеча могут рассматриваться как находящиеся в одном и том же переключающем состоянии (все включены или все выключены) и три транзистора нижнего плеча также могут рассматриваться как находящиеся в одном и том же переключающем состоянии. Поэтому на фигурах с 9 по 14 n-p-n транзисторы Q11, Q13 и Q15 инвертора 20 совместно представлены верхним плечом 20А и n-p-n транзисторы Q12, Q14 и Q16 инвертора 20 совместно представлены нижним плечом 20В. Кроме того, n-p-n транзисторы Q21, Q23 и Q25 совместно представлены верхним плечом 30А и n-p-n транзисторы Q22, Q24 и Q26 совместно представлены нижним плечом 30В.
На фигурах 9 и 10 показано протекание тока в четвертом квадранте из фиг.8. Что касается фиг.9, то согласно варианту осуществления 1 работа инвертора 20 в режиме широтно-импульсной модуляции PWM выполняется на основе нуль-фазового командного напряжения Е0, показанного на фиг.4, а инвертор 30 не принимает нуль-фазовое командное напряжение Е0. Поэтому в нуль-фазовой эквивалентной схеме инвертор 30 обычно находится в выключенном состоянии.
Когда верхнее плечо 20А инвертора 20 выключено, а нижнее плечо 20В включено, ток протекает от промышленного источника 90 питания через нейтральную точку N1, нижнее плечо 20В, земляную линию SL, нижнее плечо 30В инвертора 30 и нейтральную точку N2.
Что касается фиг.10, то, когда нижнее плечо 20В инвертора 20 выключается, а верхнее плечо 20А включается, энергия, накопленная в импедансе 152 (в индуктивности рассеяния двигатель-генераторов MG1 и MG2), разряжается, и ток протекает через верхнее плечо 20А к устройству В накопления энергии.
На фигурах 11 и 12 показано протекание тока во втором квадранте из фиг.8. Что касается фиг.11, то, когда верхнее плечо 20А инвертора 20 включено, а нижнее плечо 20В выключено, ток протекает от промышленного источника 90 питания через нейтральную точку N2, верхнее плечо 30А инвертора 30, питающую линию PL1, верхнее плечо 20А и нейтральную точку N1.
Что касается фиг.12, то, когда верхнее плечо 20А инвертора 20 выключается, а нижнее плечо 20В включается, энергия, накопленная в импедансе 152, разряжается, и ток протекает через верхнее плечо 30А инвертора 30 к устройству В накопления энергии.
В изложенном выше инвертор 30, не принимающий нуль-фазового командного напряжения Е0, обычно находится в выключенном состоянии. Однако в четвертом квадранте нижнее плечо 30В может быть включено (верхнее плечо 30А выключено), а во втором квадранте верхнее плечо 30А может быть включено (нижнее плечо 30А выключено).
На фигурах 13 и 14 показано протекание тока во время подачи энергии от устройства В накопления энергии к промышленному источнику 90 питания. На фиг.13 показано протекание тока в первом квадранте, показанном на фиг.8. Что касается фиг.13, то в первом квадранте верхнее плечо 30А инвертора 30 выключено, а нижнее плечо 30В включено. Работа инвертора 20 в режиме широтно-импульсной модуляции PWM выполняется на основании нуль-фазового командного напряжения Е0, и ток протекает от устройства В накопления энергии через верхнее плечо 20А инвертора 20 к промышленному источнику 90 питания.
На фиг.14 показано протекание тока в третьем квадранте из фиг.8. Что касается фиг.14, то в третьем квадранте верхнее плечо 30А инвертора 30 включено, а нижнее плечо 30В выключено. Работа инвертора 20 в режиме широтно-импульсной модуляции PWM выполняется на основании нуль-фазового командного напряжения Е0, и ток протекает от устройства В накопления энергии через верхнее плечо 30А инвертора 30 к промышленному источнику 90 питания.
Хотя это особо не показано, работа инвертора 30 в режиме широтно-импульсной модуляции PWM на основании нуль-фазового командного напряжения Е0 также может быть описана аналогичным образом.
Между инверторами 20 и 30 может периодически осуществляться переключение для работы инвертора в режиме широтно-импульсной модуляции PWM на основании нуль-фазового командного напряжения Е0. Например, их переключение может осуществляться на основании периода напряжения VAC (например, через каждые несколько периодов). Поэтому сосредоточение нагрузки на одном из инверторов может быть исключено.
Как описывалось выше, согласно варианту 1 осуществления блок 62 формирования командного тока формирует командный ток IR, который свободен от гармонической составляющей или колебательной составляющей промышленного источника 90 питания, и благодаря этому можно осуществлять зарядку или передачу энергии с коэффициентом мощности 1 относительно промышленного источника 90 питания. Блок 64 управления инвертором управляет током на основании командного тока IR, и, следовательно, генерирование недействующей мощности или гармонического тока, полученного из гармонической составляющей или колебательной составляющей, можно ограничить.
Таким образом, согласно варианту 1 осуществления обеспечивается эффективная зарядка устройства В накопления энергии от промышленного источника 90 питания и эффективная подача энергии от устройства В накопления энергии к промышленному источнику 90 питания. Кроме того, даже когда уровень напряжения промышленного источника 90 питания переключают, постоянная электрическая энергия, соответствующая значению PR команды зарядки/разрядки энергии, может гарантироваться. В частности, хотя уровень напряжения промышленного источника 90 питания различается от страны к стране, в соответствии с вариантом 1 осуществления постоянная энергия зарядки и постоянная энергия подачи могут быть получены без необходимости изменения в системе или настройке. Кроме того, могут быть предотвращены потери и генерация недействующей электрической мощности, обусловленные гармониками и колебательной составляющей, и поэтому могут быть реализованы высокая эффективность и малые габариты.
Кроме того, блок 64 управления инвертором управляет нуль-фазовым напряжением инвертора 20 на основании командного тока IR, и поэтому управление не оказывает никакого влияния на вращающий момент двигатель-генераторов MG1 и MG2. Таким образом, в соответствии с вариантом 1 осуществления регулирование мощности от промышленного источника 90 питания возможно без влияния на регулирование крутящего момента двигатель-генераторов MG1 и MG2. В частности, зарядка устройства В накопления энергии от промышленного источника 90 питания и подача энергии с устройства В накопления энергии к промышленному источнику 90 питания возможны при приведении в действие двигатель-генераторов MG1 и MG2.
Кроме того, блок 64 управления инвертором управляет нуль-фазовым напряжением только инвертора 20 на основании командного тока IR, и поэтому коммутационные потери могут быть меньше, чем, когда управляются нуль-фазовые напряжения обоих инверторов 20 и 30. Кроме того, может быть упрощена управляющая логика.
Согласно варианту 1 осуществления обмен энергией с промышленным источником 90 питания происходит с использованием трехфазных обмоток 12 и 14 двигатель-генераторов MG1 и MG2, а также инверторов 20 и 30, и поэтому нет необходимости отдельно предусматривать специальное устройство преобразования энергии. Таким образом, в соответствии с вариантом 1 осуществления число дополнительных компонентов может быть уменьшено. В результате изобретение способствует уменьшению стоимости, снижению массы и увеличению пробега гибридного транспортного средства 100.
Второе осуществление
В варианте 1 осуществления только инвертор 20 (или 30) работает с широтно-импульсной модуляцией PWM на основании нуль-фазового командного напряжения Е0, тогда как в варианте 2 осуществления оба инвертора 20 и 30 работают с широтно-импульсной модуляцией PWM.
Вариант 2 осуществления отличается от варианта 1 осуществления конфигурацией блока управления инвертором, и за исключением этого момента, он является таким же, как вариант 1 осуществления.
На фиг.15 представлена подробная функциональная схема блока управления инвертором согласно варианту 2 осуществления. Что касается фиг.15, то блок 64А управления инвертором соответствует блоку 64 управления инвертором из варианта 1 осуществления, показанному на фиг.4, и он дополнительно включает в себя блоки 126 и 128 умножения и блок 130 вычитания.
Блок 126 умножения нуль-фазовое командное напряжение Е0 с блока 118 регулирования тока умножает на 1/2 и выводит результат операции на блок 120 суммирования. Блок 120 суммирования выходной сигнал с блока 126 умножения суммирует с командным напряжением каждой фазы с операционного блока 112 фазового напряжения для управления электродвигателем и выводит результат операции на блок 122 широтно-импульсного управления PWM.
Блок 128 умножения нуль-фазовое командное напряжение Е0 с блока 118 регулирования тока умножает на 1/2 и выводит результат операции на блок 130 вычитания. Блок 130 вычитания выходной сигнал с блока 128 умножения вычитает из командного напряжения каждой фазы с операционного блока 114 фазового напряжения для управления электродвигателем и выводит результат операции на блок 124 широтно-импульсного управления PWM. Затем на основании командного напряжения с блока 130 вычитания блок 124 широтно-импульсного управления PWM формирует сигнал PWM2 для фактического включения/выключения каждого из n-p-n транзисторов с Q21 по Q26 инвертора 30 и выводит сформированный сигнал PWM2 на каждый из n-p-n транзисторов с Q21 по Q26 инвертора 30.
В частности, в блоке 64А управления инвертором команда, полученная путем умножения нуль-фазового командного напряжения Е0 с блока 118 регулирования тока на 1/2, подается на блок 122 широтно-импульсного управления PWM инвертора 20, и команда, соответствующая команде, подаваемой на блок 122 широтно-импульсного управления PWM инвертора 120, с обратным знаком подается на блок 124 широтно-импульсного управления PWM инвертора 30. В частности, когда на основании нуль-фазового командного напряжения Е0 с блока 118 регулирования тока на нейтральных точках N1 и N2 формируется разность напряжений, нагрузка по напряжению распределяется инверторами 20 и 30.
На фиг.16 представлена временная диаграмма форм сигналов, иллюстрирующая сигналы PWM1 и PWM2, формируемые блоком 64А управления инвертором, показанным на фиг.15, и разность напряжений, формируемая на нейтральных точках N1 и N2 в ответ на сигналы PWM1 и PWM2. На фиг.16 показан пример, в котором регулирование вращающего момента двигатель-генераторов MG1 и MG2 не выполняется.
Что касается фиг.16, то сигнал k1 треугольной формы волны представляет собой несущий сигнал, имеющий заданную несущую частоту. Амплитуда сигнала k1 треугольной формы устанавливается в соответствии с напряжением VDC с датчика 72 напряжения. Кривая k2 представляет собой нуль-фазовое командное напряжение, подаваемое на блок 122 широтно-импульсного управления PWM, соответствующий инвертору 20. Кривая k3 в виде пунктирной кривой представляет собой нуль-фазовое командное напряжение, подаваемое на блок 124 широтно-импульсного управления PWM, соответствующий инвертору 30. Кривая k3 является версией кривой k2, описанной выше, имеющей обратный знак.
В блоке 122 широтно-импульсного управления PWM кривая k2 сравнивается с сигналом k1 треугольной формы волны и формируется импульсный сигнал, значение напряжения которого изменяется в зависимости от соотношения величины между кривой k2 и сигналом k1 треугольной формы волны. С блока 122 широтно-импульсного управления PWM сформированный сигнал в качестве сигнала PWM1 выводится на инвертор 20, и плечи соответствующих фаз инвертора 20 переключаются синхронно друг с другом в ответ на сигнал PWM1.
В блоке 124 широтно-импульсного управления кривая k3 сравнивается с сигналом k1 треугольной формы волны и формируется импульсный сигнал, значение напряжения которого изменяется в зависимости от соотношения величины между кривой k3 и сигналом k1 треугольной формы волны. С блока 124 широтно-импульсного управления сформированный сигнал PWM в качестве сигнала PWM2 выводится на инвертор 30, и плечи соответствующих фаз инвертора 30 переключаются синхронно друг с другом в ответ на сигнал PWM2.
В таком случае разность напряжений между напряжением VN1 в нейтральной точке N1 и напряжением VN2 в нейтральной точке N2 изменяется так, как показано на фигуре. Форма разности напряжений между нейтральными точками N1 и N2 имеет удвоенную частоту, в отличие от варианта 1 осуществления, в соответствии с которым только один из инверторов 20 и 30 работает в режиме широтно-импульсной модуляции PWM (в случае, когда только один из инверторов 20 и 30 работает в режиме широтно-импульсной модуляции PWM, форма напряжения нейтральной точки N1, N2 будет такой же, как сигнал PWM1 или PWM2).
В изложенном выше нуль-фазовое командное напряжение Е0 с блока 118 регулирования тока умножается на 1/2 в каждом блоке 126 и 128 умножения, так что нагрузка по напряжению для формирования разности напряжений между нейтральными точками N1 и N2 распределяется равномерно инверторами 20 и 30. Инверторы 20 и 30 могут выдерживать различные нагрузки по напряжению. Например, нуль-фазовое командное напряжение Е0 с блока 118 регулирования тока может быть умножено на k (0≤k≤1) в блоке 126 умножения, и оно может быть умножено на (1-k) в блоке 128 умножения, при этом значение k задают так, чтобы уменьшить долю того инвертора, который соответствует двигатель-генератору, формирующему напряжение противо-ЭДС.
В соответствии с вариантом 2 осуществления форма напряжения на нейтральных точках N1 и N2 становится сглаженной, и поэтому составляющая гармонического тока в токе IAC может быть снижена. Кроме того, неэффективная мощность и шум также могут быть снижены, а входной/выходной токовый сигнал устройства В накопления энергии также сглаживается.
Модификация 1 варианта 2 осуществления
В изложенном выше нуль-фазовые командные напряжения, имеющие противоположные знаки, подаются на блок 122 широтно-импульсного управления PWM, соответствующий инвертору 20, и блок 124 широтно-импульсного управления PWM, соответствующий инвертору 30, соответственно. Однако также можно подавать нуль-фазовые командные напряжения одинакового знака на блоки 122 и 124 широтно-импульсного управления PWM и использовать сигнал, полученный инвертированием знака несущего сигнала, используемого для блока 122 широтно-импульсного управления PWM, в качестве несущего сигнала для блока 124 широтно-импульсного управления PWM.
На фиг.17 для модификации 1 варианта 2 осуществления представлена диаграмма форм сигналов PWM1 и PWM2 и разности напряжений, формирующейся на нейтральных точках N1 и N2 в ответ на сигналы PWM1 и PWM2. Что касается фиг.17, то формирование сигнала PWM1 является таким же, как формирование во 2 варианте осуществления, показанном на фиг.16.
Сигнал k4 треугольной формы волны представляет собой несущий сигнал, используемый в блоке 124 широтно-импульсного управления PWM, соответствующем инвертору 30, и он является версией сигнала k2 треугольной формы волны, имеющего обратный знак, используемого в блоке 122 широтно-импульсного управления PWM, соответствующем инвертору 20.
В блоке 124 широтно-импульсного управления PWM кривая k2 сравнивается с сигналом k4 треугольной формы волны и формируется импульсный сигнал PWM, значение напряжения которого изменяется в зависимости от соотношения величины между кривой k2 и сигналом k4 треугольной формы волны. С блока 124 широтно-импульсного управления PWM сформированный сигнал PWM выводится в качестве сигнала PWM2 на инвертор 30.
В модификации 1 варианта 2 осуществления форма волны сигнала PWM2 является такой же, как и сигнала PWM2 согласно варианту 2 осуществления, показанному на фиг.16, и поэтому форма разности напряжений между напряжением VN1 в нейтральной точке N1 и напряжением VN2 в нейтральной точке N2 является такой же, как форма в варианте 2 осуществления.
Модификация 2 варианта 2 осуществления
В модификации 2 варианта 2 осуществления один из инверторов 20 и 30 работает дополнительно к другому. В частности, в модификации 2 знак сигнала PWM1, формируемого с использованием нуль-фазового командного напряжения и несущего сигнала, является обратным знаку сигнала PWM2.
На фиг.18 в соответствии с модификацией 2 варианта 2 осуществления представлена диаграмма форм сигналов, представляющих сигналы PWM1 и PWM2 и разность напряжений, образующуюся между нейтральными точками N1 и N2 в ответ на сигналы PWM1 и PWM2. Что касается фиг.18, то формирование сигнала PWM1, соответствующего инвертору 20, является таким же, как формирование в варианте 2 осуществления, показанном на фиг.16. Сигнал PWM2, соответствующий инвертору 30, является версией сигнала PWM1, имеющего обратный знак, соответствующего инвертору 20.
Сигнал PWM2 может быть сформирован с использованием нуль-фазового командного напряжения и несущего сигнала, а сигнал PWM1 может быть сформирован инвертированием знака сформированного сигнала PWM2.
В модификации 2 варианта 2 осуществления сигнал PWM2 формируется на основании сигнала PWM1. Поэтому рабочая нагрузка может быть снижена. Таким образом, в соответствии с модификацией 2 варианта 2 осуществления нагрузка по напряжению в том случае, когда между нейтральными точками N1 и N2 образуется разность напряжений, может быть распределена инверторами 20 и 30, и в то же время реализуется более простое управление.
Вариант 3 осуществления
Чтобы степень регулирования следовала за заданным входным сигналом без установившегося отклонения, необходимо, чтобы замкнутый контур системы регулирования содержал модель формирования заданного входного сигнала (принцип внутренней модели). Поэтому в варианте 3 осуществления раскрыта конфигурация, в которой с использованием того факта, что командный ток IR является синусоидальной функцией, модель командного тока IR (внутренняя модель) включена в замкнутый контур системы регулирования тока.
Вариант 3 осуществления отличается от вариантов 1 или 2 осуществления конфигурацией блока регулирования тока в блоке управления инвертором, и за исключением этого момента, конфигурация является такой же, как конфигурация из вариантов 1 или 2 осуществления.
На фиг.19 представлена структурная алгоритмическая схема, отражающая конфигурацию блока регулирования тока в соответствии с вариантом 3 осуществления. Что касается фиг.19, то блок 118А регулирования тока включает в себя блок 202 пропорционально-интегрального регулирования (ПИ-регулирования), компенсирующий блок 204 внутренней модели и блок 206 суммирования.
Блок 202 пропорционально-интегрального регулирования выполняет пропорционально-интегральную операцию с использованием в качестве входного сигнала отклонения между командным током IR с блока 62 формирования командного тока и током IAC с датчика 86 тока и выводит результат операции на блок 206 суммирования.
Компенсирующий блок 204 внутренней модели включает в себя модель синусоидальной волны, поскольку командный ток IR является синусоидальной функцией. Компенсирующий блок 204 внутренней модели вырабатывает сигнал компенсации с использованием синусоидальной модели и выводит вычисленный сигнал компенсации на блок 206 суммирования.
В блоке 206 суммирования сигнал компенсации с компенсирующего блока 204 внутренней модели суммируется с выходным сигналом с блока 202 пропорционально-интегрального регулирования, и результат операции выводится в качестве нуль-фазового командного напряжения Е0.
В блоке 118 регулирования тока модель синусоидальной волны включена в замкнутый контур системы регулирования тока, поскольку командный ток IR является синусоидальной функцией, и поэтому отклонение между командным током IR и током IAC может быть устранено без повышения до некоторой степени коэффициента усиления блока 202 пропорционально-интегрального регулирования.
На фиг.20 представлена структурная алгоритмическая схема, иллюстрирующая пример конфигурации компенсирующего блока 204 внутренней модели, показанного на фиг.19. Что касается фиг.20, то компенсирующий блок 204 внутренней модели включает в себя синусоидальную функцию передачи. В данном случае ω представляет частоту командного тока IR, в частности она является такой же, как частота синусоидальной волны, формируемой блоком 106 формирования синусоидальной волны из блока 62 формирования командного тока, показанного на фиг.3, а k является коэффициентом пропорциональности.
На фиг.21 представлена структурная схема управления, отражающая другой пример конфигурации компенсирующего блока 204 внутренней модели, показанного на фиг.19. Что касается фиг.21, то компенсирующий блок 204 внутренней модели включает в себя операционные блоки 402 и 404 среднего значения, блок 406 вычитания, блок 408 пропорционально-интегрального регулирования и блоки 410 и 412 умножения.
В операционном блоке 402 среднего значения вычисляется среднее значение величины командного тока IR. Например, операционный блок 402 среднего значения оперирует средним значением за полупериод (фаза 0~π или π~2π) командного тока IR. В качестве варианта для нахождения среднего значения величины командного тока IR операционный блок 402 среднего значения может осуществлять интегрирование абсолютного значения командного тока IR в течение одного периода или нескольких периодов, деление проинтегрированного значения на число выборок и умножение результата на переводной коэффициент.
Аналогичным образом, как и в операционном блоке 402 среднего значения, в операционном блоке 404 среднего значения вычисляется среднее значение величины тока IAC с датчика 86 тока. Блок 406 вычитания вычитает выходной сигнал операционного блока 404 среднего значения из выходного сигнала операционного блока 402 среднего значения и выводит результат операции на блок 408 пропорционально-интегрального. Блок 408 пропорционально-интегрального регулирования выполняет пропорционально-интегральную операцию с использованием отклонения между выходным сигналом с операционного блока 402 среднего значения и выходным сигналом с операционного блока 404 среднего значения в качестве входного сигнала и выводит результат операции на блок 412 умножения.
Блок 410 умножения осуществляет умножение синусоидальной функции волны с такой же фазой, как и фаза напряжения промышленного источника 90 питания, на

Таким образом, согласно варианту 3 осуществления компенсирующий блок 204 внутренней модели включает в себя модель синусоидальной волны, в соответствии с командным током IR, являющимся синусоидальной функцией, и поэтому становится возможным регулирование тока без установившегося отклонения относительно командного тока IR. В соответствии с этим значение командного тока может быть лучше отслежено, при этом повышаются устойчивость, устойчивость и улучшается чувствительность регулирования. В результате при реализации высокоэффективного и малогабаритного устройства могут быть снижены неэффективная мощность и гармонический ток.
Кроме того, когда предусмотрен компенсирующий блок 204 внутренней модели, коэффициент усиления блока 202 пропорционально-интегрального регулирования может быть снижен и на основании этого аспекта также может быть повышена устойчивость регулирования тока.
Вариант 4 осуществления
При управлении переключением инверторов обычно предусматривается бестоковая пауза для предотвращения одновременного включения верхних и нижних плеч. Вследствие влияния бестоковой паузы возникает периодическое искажение формы волны вблизи точки перехода через нуль тока IAC. В частности, в инверторах большой мощности, используемых в транспортных средствах с использованием электрической энергии, таких как гибридное транспортное средство, бестоковая пауза часто задается большей, и в таком случае имеются значительные искажения. Вариант 4 осуществления способствует снижению искажений формы волны, периодически образующихся в результате влияния бестоковой паузы инверторов.
На фиг.22 показано искажение формы волны, периодически образующееся в результате влияния бестоковой паузы инверторов 20 и 30. Что касается фиг.22, то по ординате и абсциссе представлены ток и время, соответственно, а на графике нанесены изменения во времени командного тока IR и фактического значения тока IAC.
В результате влияния бестоковой паузы инверторов 20 и 30 форма волны тока IAC является периодически искаженной вблизи точек перехода через нуль в моменты t0, t3 и t4 времени, и искажение становится меньше на расстоянии от точек перехода через нуль. Например, при обычном пропорционально-интегральном регулировании, когда коэффициент усиления повышают для ограничения искажения вблизи точки перехода через нуль, возникает перерегулирование или автоколебание, что может сделать регулирование неустойчивым. С другой стороны, когда коэффициент усиления снижают, искажение вблизи точки перехода через нуль не может быть предотвращено в достаточной степени.
Поэтому на основании отклонения ΔI(θac1) между командным током IR и током IAC в момент t1 времени, соответствующий определенной фазе θac1, вычисляется степень компенсации и вычисленная степень компенсации выводится в момент t5 времени, соответствующий фазе θac1 спустя 1 период. Затем на основании отклонения ΔI(θac2), непоказанного, между командным током IR и током IAC в момент t2 времени, соответствующий определенной фазе θac2, вычисляется степень компенсации и вычисленная степень компенсации выводится в момент t6 времени, соответствующий фазе θac2 спустя 1 период. Такое регулирование выполняется многократно от фазы к фазе.
Другими словами, степень компенсации вычисляется на основании отклонения между командным током IR и током IAC строго одной предшествующей фазы. Эта операция выполняется многократно в соответствии с фазой θac командного тока IR. В частности, при повторяющемся регулировании определяется степень компенсации при такой же фазе следующего периода на основании отклонения предшествующего периода, и, следовательно, это является эффективным для предотвращения периодического возмущения, создающегося вблизи каждой точки перехода через нуль вследствие влияния бестоковой паузы инверторов.
Вариант 4 осуществления отличается от вариантов 1 или 2 осуществления конфигурацией блока регулирования тока в блоке управления инвертором, и за исключением этого момента, является таким же, как варианты 1 или 2 осуществления.
На фиг.23 представлена структурная схема управления, иллюстрирующая конфигурацию блока регулирования тока согласно варианту 4 осуществления. Что касается фиг.23, то блок 118В регулирования тока включает в себя таблицу 212 хранения отклонений токов и таблицу 214 коэффициентов усиления. Таблица 212 хранения отклонений токов принимает с блока 116 вычитания отклонение между командным током IR и током IAC с датчика 86 тока и принимает фазу θac командного тока IR. В качестве фазы θac может быть использована фаза, обнаруженная в блоке 104 обнаружения фазы блока 62 формирования командного тока.
Таблица 212 хранения отклонений токов хранит значения ΔI(0)~ΔI(359) каждой фазы (например, каждого градуса) отклонения ΔI между командным током IR и током IAC. После сохранения каждого из отклонений ΔI(0)~ΔI(359) одного периода из таблицы 212 хранения отклонений токов считывается сохраненное значение в соответствии с фазой θac и выводится в таблицу 214 коэффициентов усиления.
Таблица 214 коэффициентов усиления хранит коэффициент усиления пропорционально-интегрального регулирования для каждой фазы (например, каждого градуса). В соответствии с фазой θac в таблице 214 коэффициентов усиления осуществляется умножение выходного сигнала таблицы 212 хранения отклонений токов на соответствующий коэффициент усиления пропорционально-интегрального регулирования для вычисления степени компенсации, и результат операции выводится в качестве нуль-фазового командного напряжения Е0.
В изложенном выше отклонение ΔI между командным током IR и током IAC сохраняется от фазы к фазе. Также можно сохранять командный ток IR от фазы к фазе, и ток IAC можно вычитать из командного тока, считанного спустя один период, и результат можно выводить в таблицу 214 коэффициентов усиления.
Как описывалось выше, согласно варианту 4 осуществления искажение формы волны тока, обусловленное периодически создаваемым возмущением, включающим влияние бестоковой паузы инверторов 20 и 30, может быть ограничено. В результате повышается регулируемость тока, а генерация неэффективной мощности или гармонического тока может быть предотвращена. Поэтому можно реализовать эффективную зарядку устройства В накопления энергии и эффективную передачу энергии к промышленному источнику 90 питания.
Вариант 5 осуществления
В вариантах с 1 по 4 осуществления, описанных выше, нуль-фазовое командное напряжение Е0, формируемое блоком регулирования тока, подается на каждую фазу инвертора 20 или/и 30. В частности, в инверторе 20 или/и 30 трехфазное совместное (синхронное) регулирование тока IAC выполняется блоком управления инвертором. Однако, когда импедансы соответствующих фаз инвертора являются плохо сбалансированными, токи, протекающие по обмоткам соответствующих фаз, будут плохо сбалансированными и могут создавать вращающий момент. Поэтому в варианте 5 осуществления блок регулирования тока предусмотрен для каждой фазы инверторов 20 и 30, и регулирование тока выполняется независимо для каждой фазы, так что одинаковые токи протекают по обмоткам соответствующих фаз.
Вариант 5 осуществления отличается от вариантов с 1 по 4 осуществления конфигурацией блока управления инвертором, и за исключением этого момента, оно является таким же, как и варианты с 1 по 4 осуществления.
На фиг.24 представлена подробная функциональная схема блока управления инвертором в соответствии с вариантом 5 осуществления. Что касается фиг.24, то блок 64В управления инвертором соответствует конфигурации блока 64 управления инвертором из варианта 1 осуществления, показанного на фиг.4, и он включает в себя блок 222 умножения, блоки 224, 228 и 232 вычитания и блоки 226, 230 и 234 регулирования тока вместо блока 116 вычитания и блока 118 регулирования тока.
Блок 222 умножения осуществляет умножение на 1/3 командного тока IR и вывод результата. Блок 224 вычитания осуществляет вычитание тока Iu1 фазы U с датчика 82 тока из выходного сигнала блока 222 умножения и выводит результат операции на блок 226 регулирования тока. На основании выходного сигнала с блока 224 блок 226 регулирования тока формирует нуль-фазовое командное напряжение E0u для фазы U, чтобы имелся ток Iu1 фазы U, отслеживающий команду, равную 1/3 командного тока IR, и выводит сформированное нуль-фазовое командное напряжение E0u для фазы U на блок 120 суммирования.
Блок 228 вычитания осуществляет вычитание тока Iv1 фазы V с датчика 82 тока из выходного сигнала блока 222 умножения и выводит результат операции на блок 230 регулирования тока. На основании выходного сигнала с блока 228 вычитания блок 230 регулирования тока формирует нуль-фазовое командное напряжение E0v для фазы V, чтобы имелся ток Iv1 фазы V, отслеживающий команду, равную 1/3 командного тока, и выводит сформированное нуль-фазовое командное напряжение E0v для фазы V на блок 120 суммирования.
Блок 232 вычитания осуществляет вычитание тока Iw1 фазы W с датчика 82 тока из выходного сигнала блока 222 умножения и выводит результат операции на блок 234 регулирования тока. На основании выходного сигнала с блока 232 вычитания блок 234 регулирования тока формирует нуль-фазовое командное напряжение E0w для фазы W, чтобы имелся ток Iw1 фазы W, отслеживающий команду, равную 1/3 командного тока IR, и сформированное нуль-фазовое командное напряжение E0w выводится на блок 120 суммирования.
Блоки 226, 230 и 234 регулирования тока активизируются, когда сигнал АС является активным, а когда сигнал Ас является неактивным, блоки выводят нуль-фазовые командные напряжения соответственно E0u, E0v и E0w, равные 0.
Блок 120 суммирования осуществляет суммирование командных напряжений фаз U, V и W с операционного блока 112 фазовых напряжений для управления электродвигателем по нуль-фазовым командным напряжениям E0u, E0v и E0w, соответственно, и выводит результат операции на блок 122 широтно-импульсного управления PWM.
Для регулирования тока IAC в блоке 64В управления инвертором предусмотрены блоки 226, 230 и 234 регулирования тока для фаз U, V и W, соответственно, и ток регулируется так, что каждый из токов фаз U, V и W отслеживает команду, равную 1/3 командного тока IR. Поэтому при формировании тока IAC осуществляется протекание тока одинаковой фазы и одинаковой величины по обмотке каждой фазы, и, следовательно, в двигатель-генераторе MG1 не создается вращающий момент.
В изложенном выше блоки 226, 230 и 234 регулирования тока соответствующих фаз могут быть выполнены с помощью пропорционально-интегрального регулирования, или они могут быть образованы аналогично блокам 118А и 118В регулирования тока по вариантам 3 и 4 осуществления. Кроме того, нуль-фазовые командные напряжения E0u, E0v и E0w могут быть суммированы с командными напряжениями соответствующих фаз с операционного блока 114 фазовых напряжений для управления электродвигателем.
Как описывалось выше, согласно варианту 5 осуществления при формировании тока IAC регулирование тока выполняется независимо для каждой фазы. Поэтому даже когда импедансы соответствующих фаз двигатель-генератора MG1 являются плохо сбалансированными, осуществляется протекание тока одинаковой фазы и одинаковой величины по обмотке каждой фазы. Таким образом, согласно варианту 5 осуществления формирование вращающего момента в двигатель-генераторе MG1 можно в значительной степени предотвратить при формировании тока IAC.
Вариант 6 осуществления
В вариантах с 1 по 5 осуществления, описанных выше, напряжение VDC не регулировалось. Когда напряжение VDC поддерживается постоянным, становится возможной зарядка устройства В накопления энергии постоянным напряжением и, следовательно, становится возможной быстрая зарядка или задание образца тока в соответствии с состоянием устройства В накопления энергии. В варианте 6 осуществления добавлена система регулирования напряжения, предназначенная для подстройки напряжения VDC до заданного значения.
Вариант 6 осуществления отличается от вариантов с 1 по 5 осуществления конфигурацией блока формирования командного тока, и за исключением этого момента, она является такой же, как варианты с 1 по 5 осуществления.
На фиг.25 представлена подробная функциональная схема блока формирования командного тока в соответствии с вариантом 6 осуществления. Что касается фиг.25, то блок 62А формирования командного тока соответствует блоку 62 формирования командного тока из варианта 1 осуществления, показанному на фиг.3, и он дополнительно включает в себя блок 252 задания входного командного напряжения инвертора, блок 254 вычитания, блок 256 пропорционально-интегрального регулирования и блок 258 суммирования.
На основании напряжения VB устройства В накопления энергии и на основании напряжения VAC промышленного источника 90 питания блок 252 задания входного командного напряжения инвертора устанавливает заданное значение VDCR напряжения VDC. Например, блок 252 задания входного командного напряжения инвертора устанавливает заданное напряжение VDCR на значении более высоком, чем пиковое напряжение напряжения VAC, и более высоком, чем напряжение VB. Если заданное напряжение VDCR слишком высокое, потери в инверторах 20 и 30 возрастают, и поэтому заданное напряжение VDCR устанавливается на соответствующем значении с учетом потерь в инверторах 20 и 30. Напряжение VB устройства В накопления энергии обнаруживается непоказанным датчиком напряжения.
Блок 254 вычитания осуществляет вычитание напряжения VDC из заданного напряжения VDCR, установленного блоком 252 задания входного командного напряжения инвертора, и выводит результат операции на блок 256 пропорционально-интегрального регулирования. Блок 256 пропорционально-интегрального регулирования выполняет пропорционально-интегральную операцию с использованием выходного сигнала с блока 254 вычитания в качестве входного сигнала и выводит результат операции на блок 258 суммирования. Блок 258 суммирования суммирует результат операции с блока 256 пропорционально-интегрального регулирования с значением PR команды зарядки/разрядки энергии и выводит результат операции на блок 108 деления.
В блоке 62А формирования командного тока команда зарядки/разрядки энергии корректируется так, что напряжение VDC отслеживает заданное напряжение VDCR, и на основании скорректированной команды зарядки/разрядки энергии вычисляется командный ток IR. Отклик системы регулирования напряжения усиливается при повышении коэффициента усиления блока 256 пропорционально-интегрального регулирования. Когда отклик системы регулирования напряжения делается слишком сильным, команда зарядки/разрядки энергии значительно колеблется, и в результате это может вызывать генерацию гармонической волны. Такая возможность также должна учитываться.
Как описывалось выше, в варианте 6 осуществления добавлена система регулирования напряжения для регулирования напряжения VDC, и поэтому устройство В накопления энергии может заряжаться при постоянном напряжении. Таким образом, в соответствии с вариантом 6 осуществления для быстрой зарядки может быть реализовано регулирование. Кроме того, можно задавать образец тока IAC в соответствии с состоянием устройства В накопления энергии или уровнем напряжения промышленного источника 90 питания. Таким образом, эффективность зарядки устройства В накопления энергии может быть повышена. Кроме того, поскольку напряжение VDC является регулируемым, управляемость инверторов 20 и 30 повышается, и в результате могут быть снижены потери, гармоники волны и неэффективный ток. Также может быть ограничено ухудшение характеристик устройства В накопления энергии.
Вариант 7 осуществления
В варианте 7 осуществления между устройством В накопления энергии и инверторами 20 и 30 предусмотрен повышающий преобразователь. Напряжение VDC подстраивается повышающим преобразователем до соответствующего уровня с учетом характеристик управления и эффективности преобразования инверторов 20 и 30.
На фиг.26 представлена общая структурная схема гибридного транспортного средства, показанного в качестве примера транспортного средства согласно варианту 7 осуществления. Что касается фиг.26, то гибридное транспортное средство 100А имеет конфигурацию гибридного транспортного средства 100 согласно варианту 1 осуществления, показанному на фиг.1, и оно дополнительно включает в себя повышающий преобразователь 10, питающую линию PL2, конденсатор С3, датчик 76 напряжения и датчик 88 тока, а вместо электронного блока управления 60 оно включает в себя электронный блок 60А управления.
Устройство В накопления энергии имеет положительный электрод и отрицательный электрод, подключенные к питающей линии PL2 и земляной линии SL, соответственно. Конденсатор С3 включен между питающей линией PL2 и земляной линией SL. Повышающий преобразователь 10 включает в себя реактор L, n-p-n транзисторы Q1 и Q2 и диоды D1 и D2. N-p-n транзисторы Q1 и Q2 включены последовательно между питающей линией PL1 и земляной линией SL. Между коллектором и эмиттером n-p-n транзисторов Q1 и Q2 включены диоды D1 и D2, соответственно, для осуществления протекания тока со стороны эмиттера к стороне коллектора. Реактор L имеет один конец, подключенный к узлу между n-p-n транзисторами Q1 и Q2, и другой конец, подключенный к питающей линии PL2.
На основании сигнала PWC с электронного блока 60А управления повышающий преобразователь 10 путем использования реактора L повышает напряжение постоянного тока, принимаемое с устройства В накопления энергии, и выводит повышенное напряжение на конденсатор С1. В частности, на основании сигнала PWC с электронного блока 60А управления повышающий преобразователь 10 повышает напряжение постоянного тока с устройства В накопления энергии путем запасания тока, который протекает в ответ на операцию переключения n-p-n транзистора Q2, в виде энергии магнитного поля в реакторе L. Кроме того, синхронно с моментом выключения n-p-n транзистора Q2 повышенное напряжение с повышающего преобразователя 10 выводится на питающую линию PL1 через диод D1. Кроме того, на основании сигнала PWC с электронного блока 60А управления повышающий преобразователь 10 понижает напряжение постоянного тока, подаваемое с питающей линии PL1, и выводит его на питающую линию Pl2 для зарядки В устройства накопления энергии.
Конденсатор С3 сглаживает колебание напряжения между питающей линией PL2 и земляной линией SL. Датчик 76 напряжения обнаруживает напряжение VB устройства В накопления энергии и выводит значение обнаруженного напряжения VB на электронный блок 60А управления. Датчик 88 тока обнаруживает входной/выходной ток IB устройства В накопления энергии и выводит значение обнаруженного тока IB на электронный блок 60А управления.
На фиг.27 представлена функциональная схема электронного блока 60А управления, показанного на фиг.26. Что касается фиг.27, то электронный блок 60А управления имеет конфигурацию электронного блока 60 управления, показанного на фиг.2, и он дополнительно включает в себя блок 66 управления преобразователем. На основании значений TR1 и TR2 управления вращающего момента и чисел MRN1 и MRN2 оборотов электродвигателя двигатель-генераторов MG1 и MG2, принимаемых с электронного блока управления транспортного средства, на основании напряжения VB с датчика 76 напряжения, напряжения VDC с датчика 72 напряжения, напряжения VAC с датчика 74 напряжения и на основании сигнала АС блок 66 управления преобразователем формирует сигнал PWC, предназначенный для включения/выключения n-p-n транзисторов Q1 и Q2 повышающего преобразователя 10, и выводит сформированный сигнал PWC на повышающий преобразователь 10.
На фиг.28 представлена подробная функциональная схема блока 66 управления преобразователем, показанного на фиг.27. Что касается фиг.28, то блок 66 управления преобразователем включает в себя операционный блок 302 входного командного напряжения инвертора, блок 304 вычитания, блок 306 регулирования обратной связи (ОС) и блок 308 селекторного управления.
Когда сигнал АС является неактивным, операционный блок 302 входного командного напряжения инвертора оперирует оптимальным (заданным) значением VDCR входного напряжения инверторов на основании значений TR1 и TR2 управления вращающего момента и чисел MRN1 и MRN2 оборотов электродвигателей и выводит выработанное командное напряжение VDCR на блок 304 вычитания.
Кроме того, когда сигнал АС является активным, операционный блок 302 входного командного напряжения инвертора устанавливает командное напряжение VDCR на основании напряжения VB устройства В накопления энергии и напряжения VAC промышленного источника 90 питания. Например, по сравнению с блоком 252 задания входного командного напряжения инвертора согласно варианту 6 осуществления операционный блок 302 входного командного напряжения инвертора устанавливает заданному напряжению VDCR более высокое значение, чем пиковое напряжения VAC, и более высокое, чем напряжение VB.
Блок 304 вычитания осуществляет вычитание напряжения VDC из командного напряжения VDRC, выведенного из операционного блока 302 входного командного напряжения инвертора, и выводит результат операции на блок 306 регулирования обратной связи. Блок 306 регулирования обратной связи выполняет операцию обратной связи (такую как пропорционально-интегральная операция) для подстройки напряжения VDC к командному напряжению VDCR и выводит результат операции на блок 308 селекторного управления.
Блок 308 селекторного управления оперирует продолжительностью включения для подстройки напряжения VDC к командному напряжению VDRC на основании напряжений VB и VDC. Кроме того, на основании выработанной продолжительности включения блок 308 селекторного управления формирует сигнал PWM для включения/выключения n-p-n транзисторов Q1 и Q2 повышающего преобразователя 10 и выводит сформированный сигнал PWM в виде сигнала PWC на n-p-n транзисторы Q1 и Q2 повышающего преобразователя 10.
При увеличении времени включенного состояния n-p-n транзистора Q2 нижнего плеча повышающего преобразователя 10 запасание энергии в реакторе L возрастает, и, следовательно, напряжение VDC может быть более высоким. При увеличении времени включенного состояния n-p-n транзистора Q1 верхнего плеча напряжение VDC уменьшается. Таким образом, путем регулирования продолжительности включения n-p-n транзисторов Q1 и Q2 напряжение VDC может быть подстроено к произвольному значению, но не ниже напряжения VB.
Как описывалось выше, в соответствии с вариантом 7 осуществления предусмотрен повышающий преобразователь 10, и напряжение VDC подстраивается к заданному напряжению VDRC. Поэтому управляемость и эффективность преобразования инверторов 20 и 30 могут быть оптимизированы. В результате становятся возможными более эффективная зарядка устройства В накопления энергии от промышленного источника 90 питания и более эффективная подача энергии от устройства В накопления энергии к промышленному источнику 90 питания.
В варианте 7 осуществления достигаются эффекты, аналогичные эффектам варианта 6 осуществления, и в дополнение к этому может быть достигнута более высокая степень свободы, чем в варианте 6 осуществления, поскольку система регулирования тока для регулирования тока IAC и система регулирования напряжения для регулирования напряжения VDC предусмотрены раздельными.
Восьмое осуществление
Когда входной/выходной ток IB устройства В накопления энергии колеблется, потери в резистивной составляющей устройства В накопления энергии и резистивной составляющей реактора L повышающего преобразователя 10 возрастают, и эффективность зарядки/разрядки устройства В накопления энергии снижается. Поэтому в варианте 8 осуществления система регулирования тока, способная снижать колебание (пульсирующее движение) тока IB, добавлена к конфигурации из варианта 7 осуществления.
Вариант 8 осуществления отличается от варианта 7 осуществления конфигурацией блока управления преобразователем, и за исключением этого момента, она является такой же, как вариант 7 осуществления.
На фиг.29 представлена подробная функциональная схема блока управления преобразователем в соответствии с вариантом 8 осуществления. Что касается фиг.29, то блок 66А управления преобразователем имеет конфигурацию блока 66 управления преобразователем в соответствии с вариантом 7 осуществления, показанного на фиг.28, и он дополнительно включает в себя блок 310 деления, блок 312 суммирования, блок 314 вычитания и блок 316 пропорционально-интегрального регулирования.
Блок 310 деления осуществляет деление выходного сигнала с блока 306 регулирования обратной связи (ОС) на напряжение VB с датчика 76 напряжения. Блок 312 суммирования суммирует командный входной/выходной ток IBR для устройства В накопления энергии с выходным сигналом блока 310 деления. Командный ток IBR может быть получен, например, путем деления значения PR команды зарядки/разрядки энергии на напряжение VB.
Блок 314 вычитания осуществляет вычитание тока IB с датчика 88 тока из выходного сигнала блока 312 суммирования и выводит результат операции на блок 316 пропорционально-интегрального регулирования. Блок 316 пропорционально-интегрального регулирования выполняет пропорционально-интегральную операцию с использованием выходного сигнала с блока 314 вычитания в качестве входного сигнала и выводит результат операции на блок 308 селекторного управления.
В блоке 66А управления преобразователем блок 316 пропорционально-интегрального регулирования осуществляет регулирование тока IB так, что он становится ближе к командному току IBR. Когда управляемость тока IB делается слишком высокой (когда коэффициент усиления блока 316 пропорционально-интегрального регулирования задан слишком высоким), управляемость напряжения VDC снижается. Если конденсатор С1 имеет достаточную емкость, колебание напряжения VDC может быть предотвращено до некоторой степени конденсатором С1, причем более высокая управляемость тока IB способствует повышению эффективности зарядки/разрядки устройства В накопления энергии.
Как описывалось выше, в соответствии с вариантом 8 осуществления система регулирования тока для регулирования тока IB до заданного тока добавлена к блоку управления преобразователем, и, следовательно, путем соответствующего задания управляемости напряжения VDC и управляемости тока IB можно дополнительно повысить эффективность зарядки/разрядки устройства В накопления энергии. Кроме того, сниженное пульсирующее движение тока IB способствует меньшему ухудшению характеристик устройства В накопления энергии. В дополнение к этому, потери и ухудшение характеристик конденсатора С1 также можно уменьшить.
Вариант 9 осуществления
Если основное системное реле (непоказанное) предусмотрено между устройством В накопления энергии и повышающим преобразователем 10, должны размыкаться при некотором нарушении режима во время работы повышающего преобразователя 10, то энергия, запасенная в реакторе L повышающего преобразователя 10, будет разряжаться, и это вызовет протекание избыточного тока через основное системное реле, и основное системное реле может привариться. Кроме того, к повышающему преобразователю 10 может быть приложено избыточное напряжение, которое приводит к вызываемому перенапряжением пробою n-p-n транзисторов Q1 и Q2. Поэтому согласно варианту 9 осуществления нарушение режима обнаруживается на основании отклонения между током IB и командным током IBR, и, если обнаруживается любое нарушение режима, повышающий преобразователь 10 прекращает работу до того, как разомкнется основное системное реле.
Вариант 9 осуществления отличается от варианта 8 осуществления конфигурацией блока управления преобразователем, и за исключением этого момента, она является такой же, как и вариант 8 осуществления.
На фиг.30 представлена подробная функциональная схема блока управления преобразователем в соответствии с вариантом 9 осуществления. Что касается фиг.30, то блок 66В управления преобразователем имеет конфигурацию блока 66А управления преобразователем из варианта 8 осуществления, показанного на фиг.29, и он дополнительно включает в себя блок 318 обнаружения нарушения.
Блок 318 обнаружения нарушения определяет, превышает или нет выходной сигнал блока 314 вычитания, то есть отклонение между командным током и током IB с датчика 88 тока, заданное определенное значение. Если определяется, что отклонение превышает определенное значение, блок 318 обнаружения нарушения активирует сигнал SDOWN выключения и выводит его на блок 308 селекорного управления.
Когда сигнал SDOWN выключения с блока 308 обнаружения нарушения активируется, блок 308 селекторного управления формирует сигнал PWC для выключения обоих n-p-n транзисторов Q1 и Q2 и выводит сигнал на повышающий преобразователь 10.
Таким образом, в соответствии с вариантом 9 осуществления, когда отклонение между командным током и фактическим током превышает определенное значение, повышающий преобразователь 10 определяется как неисправный, и повышающий преобразователь 10 немедленно прекращает работу. Поэтому сварка основного системного реле или вызываемый перенапряжением пробой повышающего преобразователя 10 могут быть предотвращены. Кроме того, поскольку обнаружение неисправности повышающего преобразователя 10 осуществляется путем обнаружения фактического тока, становится возможной защита ненагруженного устройства.
Кроме того, в каждом из вариантов осуществления, описанных выше, двигатель-генераторы MG1 и MG2 представляют собой трехфазные вращающиеся электрические машины переменного тока. Однако настоящее изобретение также можно распространить и применить для многофазных вращающихся электрических машин переменного тока, а не только в случае трехфазных машин.
В каждом из вариантов осуществления, описанных выше, гибридное транспортное средство предполагается последовательного/параллельного типа, в котором мощность двигателя 4 может быть разделена и передана на мост и двигатель-генератор MG1 устройством 3 разделения мощности. Однако настоящее изобретение также применимо к гибридному транспортному средству последовательного типа, в котором двигатель 4 используется только для приведения в действие двигатель-генератора MG1, а движущая сила транспортного средства создается только двигатель-генератором MG2, который использует электрическую энергию, генерируемую двигатель-генератором MG1.
Кроме того, в каждом из вариантов осуществления гибридное транспортное средство описано как пример транспортного средства в соответствии с настоящим изобретением. Настоящее изобретение также применимо к электрическому транспортному средству или транспортному средству с топливным элементом, в которых двигатель 4 не установлен.
В изложенном выше двигатель-генераторы MG1 и MG2 соответствуют «первой вращающейся электрической машине переменного тока» и «второй вращающейся электрической машине переменного тока», и трехфазные обмотки 12 и 14 соответствуют «первой многофазной обмотке» и «второй многофазной обмотке» настоящего изобретения. Кроме того, инверторы 20 и 30 соответствуют «первому инвертору» и «второму инвертору настоящего изобретения, и нейтральные точки N1 и N2 соответствуют «первой нейтральной точке» и «второй нейтральной точке» настоящего изобретения. Кроме того, питающие линии NL1 и NL2 соответствуют «паре питающих линий» настоящего изобретения, и датчик 74 напряжения соответствует «первому устройству обнаружения напряжения» настоящего изобретения.
Датчик 86 тока соответствует «первому устройству обнаружения тока» настоящего изобретения и датчики 82 и 84 тока соответствуют «множеству вторых устройств обнаружения тока» настоящего изобретения. Кроме того, каждый из блоков 118, 118А, 118В регулирования тока соответствует «блоку регулирования тока» настоящего изобретения, и блоки 226, 230, 234 регулирования тока соответствуют «множеству блоков регулирования тока» настоящего изобретения. Кроме того, блоки 122 и 124 широтно-импульсного управления PWM соответствуют «блоку формирования сигнала приведения в действие», и блок 118В регулирования тока соответствует «блоку повторного регулирования» настоящего изобретения.
Кроме того, датчик 72 напряжения соответствует «второму устройству обнаружения напряжения» настоящего изобретения, а блок 252 задания входного командного напряжения инвертора, блок 254 вычитания и блок 256 пропорционально-интегрального регулирования образуют «блок регулирования напряжения из блока формирования командного тока» настоящего изобретения. Кроме того, датчик 88 тока соответствует «третьему устройству обнаружения тока» настоящего изобретения, и операционный блок 302 входного командного напряжения инвертора, блок 304 вычитания и блок 306 регулирования обратной связи образуют «блок регулирования напряжения из блока управления преобразователем» настоящего изобретения. Кроме того, блок 312 суммирования, блок 314 вычитания и блок 316 пропорционально-интегрального регулирования образуют «блок регулирования тока из блока управления преобразователем».
Варианты осуществления, описанные в настоящей заявке, являются только примерами и не должны интерпретироваться как ограничивающие. Объем настоящего изобретения определяется каждым из пунктов формулы изобретения при соответствующем учете изложенного письменно описания осуществлений и охватывает модификации в рамках значения или эквивалента формулировок в формуле изобретения.
Реферат
Изобретение относится к регулятору мощности и транспортному средству. Технический результат - обеспечение обмена электрической энергии между электрическими двигателями и источником питания с высокой эффективностью. В регуляторе мощности электронный блок (60) управления на основании напряжения (VAC) с датчика (74) напряжения обнаруживает действующее значение и фазу напряжения промышленного источника (90) питания. В дополнение к этому, электронный блок (60) управления формирует командный ток (IR), который является командным значением тока (IAC), протекающего по питающим линиям (NL1, NL2), и находится в фазе с напряжением промышленного источника (90) питания, на основании обнаруженных действующего значения и фазы и значения (PR) команды зарядки/разрядки энергии для устройства (В) накопления энергии. Затем электронный блок (60) управления управляет нуль-фазовым напряжением инверторов (20, 30) на основании формируемого командного тока (IR). 2 н. и 20 з.п. ф-лы, 30 ил.
Формула
первое устройство обнаружения тока, обнаруживающее ток, протекающий по упомянутой паре питающих линий; в котором упомянутый блок управления инвертором включает в себя блок регулирования тока, формирующий нуль-фазовое командное напряжение упомянутых первого и второго инверторов на основании отклонения между значением обнаруженного тока с упомянутого первого устройства обнаружения тока и упомянутым значением командного тока, и блок формирования сигнала приведения в действие, формирующий сигнал приведения в действие для приведения в действие упомянутого первого и второго инверторов на основании формируемого нуль-фазового командного напряжения.
упомянутый блок регулирования тока или каждый из упомянутого множества блоков регулирования тока включает в себя компенсирующий блок внутренней модели, вычисляющий размер компенсации управления, использующей синусоидальную функцию волны, соответствующую упомянутому значению командного тока.
второе устройство обнаружения напряжения, обнаруживающее напряжение постоянного тока, прикладываемое к упомянутым первому и второму инверторам; в котором упомянутый блок формирования командного тока включает в себя блок регулирования напряжения на основании отклонения между значением обнаруженного напряжения с упомянутого второго устройства обнаружения напряжения и заданным напряжением упомянутого напряжения постоянного тока, корректирующий упомянутое значение команды зарядки/разрядки энергии так, что упомянутое напряжение постоянного тока подстраивается к упомянутому заданному значению.
Комментарии