Воздушное судно, а также способ и устройство защиты от перенапряжений для электронного регулятора на воздушном судне - RU2717541C1
Код документа: RU2717541C1
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Данная заявка представляет собой переведенную на национальную фазу в России международную заявку PCT/CN2017/113395, которая основана на заявке на патент Китая №201611093576.2, поданной 1 декабря 2016 года, по которой испрашивается приоритет и содержание которой целиком включено в состав настоящей заявки посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Раскрытие настоящего изобретения относится к области технологии воздушных судов, а более конкретно к способу защиты от перенапряжений электронного регулятора на воздушном судне, устройству защиты от перенапряжений электронного регулятора на воздушном судне и к воздушному судну, оснащенному этим устройством.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] В воздушном судне, таком как беспилотный летательный аппарат, стабильность электронного регулятора и мотора, служащих в качестве энергосистемы воздушного судна, может гарантировать нормальный полет воздушного судна. На соответствующем уровне техники выход большинства электронных регуляторов на воздушном судне может отключаться только в том случае, если напряжение на шине постоянного тока (DC, Direct Current) этих регуляторов превышает заранее заданное значение. Таким образом, выход электронного регулятора может отключаться, если воздушное судно совершает активное маневрирование, что может привести к повреждению воздушного судна.
[0004] Следовательно, возникает необходимость внесения усовершенствований в соответствующей области техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Согласно варианту осуществления аспекта раскрытия настоящего изобретения предлагается способ защиты от перенапряжений электронного регулятора на воздушном судне. Электронный регулятор сконфигурирован для управления мотором. Способ включает: определение напряжения на шине напряжения постоянного тока (DC) электронного регулятора; если напряжение на шине DC больше первого порогового значения напряжения и меньше или равно второму пороговому значению напряжения, настройку параметра управления электронного регулятора на основе разности между напряжением на шине DC и первым пороговым значением напряжения таким образом, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC, при этом второе пороговое значение напряжения больше первого порогового значения напряжения.
[0006] Согласно одному или более вариантам раскрытия настоящего изобретения параметр управления включает в себя заданную скорость, заданную составляющую тока по поперечной оси или заданную составляющую напряжения по поперечной оси.
[0007] Согласно одному или более вариантам раскрытия настоящего изобретения настройка параметра управления электронного регулятора на основе разности между напряжением на шине DC и первым пороговым значением напряжения включает: генерацию параметра суперпозиции на основе разности между напряжением на шине DC и первым пороговым значением напряжения и заранее заданного алгоритма пропорционально-интегрального (PI) управления; выполнение наложения параметра суперпозиции и параметра управления на основе направления текущей скорости мотора таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе наложенного параметра управления.
[0008] Согласно одному или более вариантам раскрытия настоящего изобретения выполнение наложения параметра суперпозиции и параметра управления на основе направления текущей скорости мотора включает: при прямом направлении текущей скорости мотора наложение параметра суперпозиции на параметр управления; при обратном направлении текущей скорости мотора наложение отрицательного значения параметра суперпозиции на параметр управления.
[0009] В соответствии с одним или более вариантами раскрытия настоящего изобретения способ также включает: если напряжение на шине DC больше второго порогового значения напряжения, управление электронным регулятором для прекращения вывода сигнала с целью остановки работы мотора.
[0010] Согласно другому аспекту раскрытия настоящего изобретения предлагается устройство защиты от перенапряжений электронного регулятора на воздушном судне. Электронный регулятор сконфигурирован для управления мотором. Устройство содержит: модуль определения напряжения, сконфигурированный для определения напряжения на шине напряжения постоянного тока (DC) электронного регулятора; модуль управления, сконфигурированный таким образом, чтобы если напряжение на шине DC больше первого порогового значения напряжения и меньше или равно второму пороговому значению напряжения, выполнялась настройка параметра управления электронного регулятора на основе разности между напряжением на шине DC и первым пороговым значением напряжения так, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC. Второе пороговое значение напряжения больше первого порогового значения напряжения.
[0011] Согласно одному или более вариантам раскрытия настоящего изобретения, параметр управления включает в себя заданную скорость, заданную составляющую тока по поперечной оси или заданную составляющую напряжения по поперечной оси.
[0012] В соответствии с одним или более вариантами раскрытия настоящего изобретения, модуль управления также сконфигурирован для генерации параметра суперпозиции на основе разности между напряжением на шине DC и первым пороговым значением напряжения и заранее заданного алгоритма управления PI; и выполнения наложения параметра суперпозиции и параметра управления на основе направления текущей скорости мотора таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе наложенного параметра управления.
[0013] В соответствии с одним или более вариантами раскрытия настоящего изобретения модуль управления также сконфигурирован для: наложения параметра суперпозиции на параметр управления при прямом направлении текущей скорости мотора; и наложения отрицательного значения параметра суперпозиции на параметр управления при обратном направлении текущей скорости мотора.
[0014] В соответствии с одним или более вариантами раскрытия настоящего изобретения модуль управления также сконфигурирован для управления электронным регулятором для прекращения вывода сигнала с целью остановки работы мотора, если напряжение на шине DC больше второго порогового значения напряжения.
[0015] Согласно еще одному аспекту раскрытия настоящего изобретения предлагается воздушное судно. Воздушное судно содержит устройство защиты от перенапряжений электронного регулятора на воздушном судне.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0016] На фиг. 1 показан алгоритм выполнения способа защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с вариантом раскрытия настоящего изобретения;
[0017] на фиг. 2 показана блок-схема управления, иллюстрирующая способ защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с конкретным вариантом раскрытия настоящего изобретения;
[0018] на фиг. 3 показана блок-схема управления, иллюстрирующая способ защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с другим конкретным вариантом раскрытия настоящего изобретения;
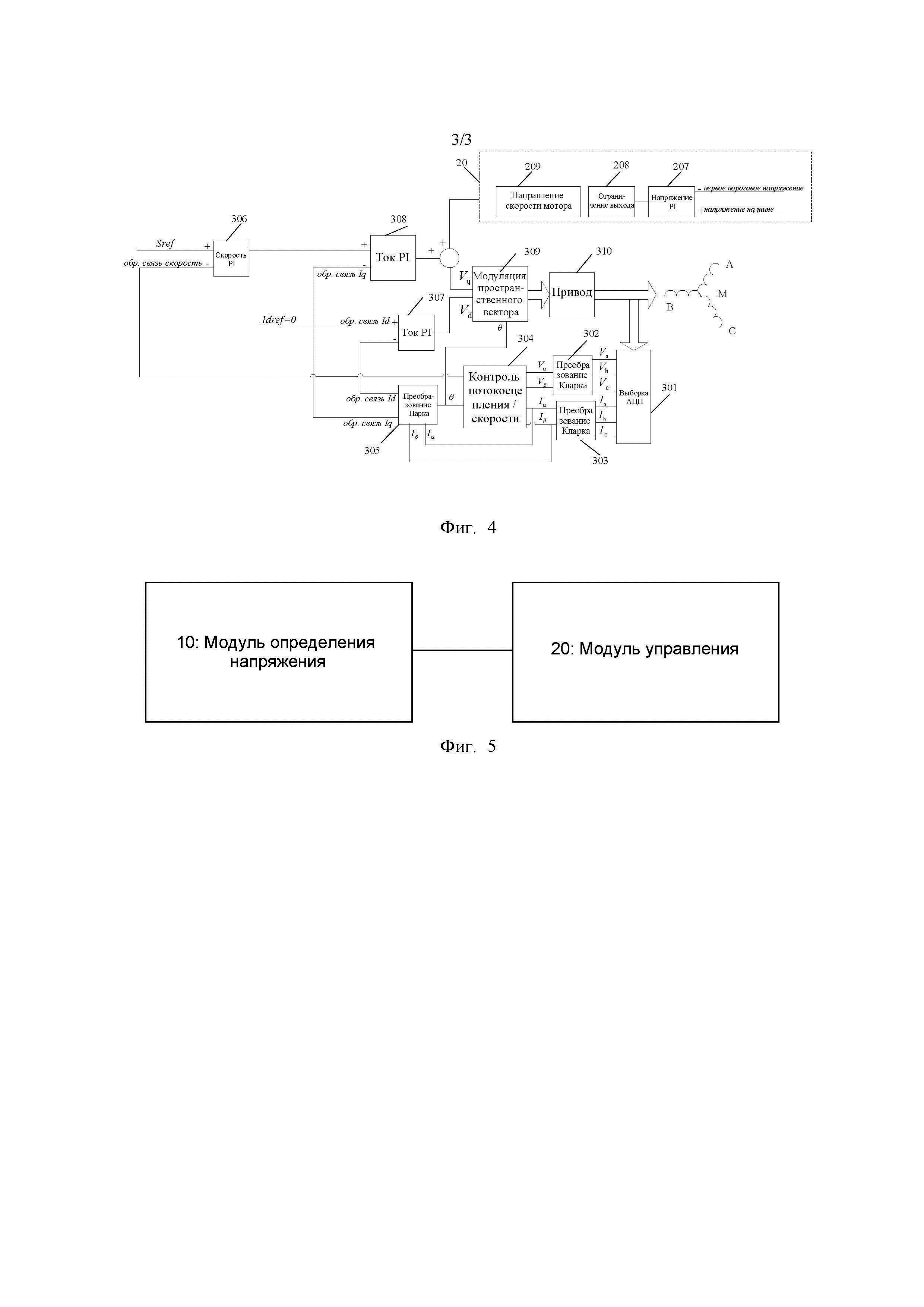
[0019] на фиг. 4 показана блок-схема управления, иллюстрирующая способ защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с еще одним конкретным вариантом раскрытия настоящего изобретения;
[0020] на фиг. 5 показана блок схема устройства защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с вариантом раскрытия настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Далее более подробно описываются варианты раскрытия настоящего изобретения, примеры которых иллюстрируются посредством прилагаемых чертежей. В настоящем описании одинаковые или схожие элементы, или элементы, выполняющие одинаковые или схожие функции, обозначаются одинаковыми ссылочными номерами. Варианты осуществления, описываемые со ссылкой на прилагаемые чертежи, являются пояснительными и используются для разъяснения в целом настоящего изобретения и не направлены на ограничение вариантов раскрытия настоящего изобретения.
[0022] Прежде всего, заявитель обнаружил и осознал тот факт, что в процессе активного маневрирования воздушного судна число оборотов двигателя может резко снижаться. Поскольку мотор с лопастями обладает определенной степенью инерции, при уменьшении скорости он возвращает энергию в электронный регулятор, вследствие чего напряжение на шине электронного регулятора возрастает. В особенности, если батарея полностью заряжена, это может привести к перенапряжению электронного регулятора. Если выход электронного регулятора отключается из-за перенапряжения при выполнении воздушным судном активного маневрирования, воздушное судно может быть повреждено или даже разрушено.
[0023] Далее, в соответствии с вариантами раскрытия настоящего изобретения и со ссылкой на прилагаемые чертежи, описывается способ защиты от перенапряжений для электронного регулятора на воздушном судне, устройство защиты от перенапряжений для электронного регулятора на воздушном судне и воздушное судно, оснащенное таким устройством.
[0024] На фиг. 1 показан алгоритм выполнения способа защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с вариантом раскрытия настоящего изобретения. Электронный регулятор сконфигурирован для управления мотором. Электронный регулятор может содержать конденсаторы, транзисторы MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor, полевой транзистор со структурой металл-оксид-полупроводник) и другие компоненты.
[0025] Как показано на фиг. 1, в соответствии с вариантом раскрытия настоящего изобретения способ защиты от перенапряжений включает следующие шаги.
[0026] На шаге S1 осуществляется определение напряжения на шине напряжения постоянного тока (DC) электронного регулятора.
[0027] Электронный регулятор может содержать полномостовую схему преобразователя, состоящую из шести MOSFET. Полномостовая схема преобразователя может содержать трехфазные мостовые плечи. Мостовое плечо каждой фазы может содержать два транзистора MOSFET. Напряжение на шине DC представляет собой напряжение, прикладываемое к двум MOSFET мостового плеча каждой фазы.
[0028] На шаге S2, если напряжение на шине DC больше первого порогового значения напряжения и меньше или равно второму пороговому значению напряжения, параметр управления электронного регулятора настраивается на основе разницы между напряжением на шине DC и первым пороговым значением напряжения таким образом, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC. Второе пороговое значение напряжения больше первого порогового значения напряжения.
[0029] На шаге S3, если напряжение на шине DC больше второго порогового значения напряжения, электронный регулятор управляется для прекращения вывода сигнала с целью остановки работы мотора.
[0030] Следует принимать во внимание, что допустимое напряжение, подаваемое на конденсаторы, транзисторы MOSFET и другие компоненты электронного регулятора, ограничено по величине. Если напряжение на шине DC превышает второе пороговое значение напряжения, то напряжение, прикладываемое к конденсаторам, транзисторам MOSFET и т.д., может превысить непосредственно предельное значение напряжения, вследствие чего компоненты могут повреждаться или даже выгорать.
[0031] Согласно одному или более вариантам раскрытия настоящего изобретения функция защиты от перенапряжений электронного регулятора может активизироваться программным обеспечением, и после активизации функции защиты от перенапряжений может выполняться определение напряжения на шине DC электронного регулятора в режиме реального времени.
[0032] Если напряжение на шине DC меньше первого порогового значения напряжения, то определяется, что в этот момент времени перенапряжение на электронном регуляторе отсутствует. Защита от перенапряжений не выполняется, и электронный регулятор может управлять мотором на основе заранее заданного параметра управления. Таким образом, воздействия на обычный полет не осуществляется.
[0033] Если напряжение на шине DC превышает первое пороговое значение напряжения и не превосходит второго порогового значения напряжения, то определяется, что в этот момент времени нарастание напряжения на шине DC вызвано выполнением активного маневрирования воздушного судна, то есть при выполнении воздушным судном большого количества активных действий мотор во время полета быстро ускоряется или замедляется, и в случае замедления инерция мотора с лопастями приводит к возврату энергии в электронный регулятор, что приводит к возрастанию напряжения на шине DC. Чем быстрее происходит замедление, тем быстрее осуществляется возврат энергии, вследствие чего напряжение на шине DC может превысить первое пороговое значение напряжения. В этот момент времени, путем настройки параметра управления с целью уменьшения скорости изменения частоты вращения мотора для уменьшения возврата энергии мотором и сдерживания дальнейшего роста напряжения на шине DC, можно обеспечить быстрое ускорение и замедление электронного регулятора в безопасном диапазоне напряжений, чтобы предотвратить отказ электронных компонентов вследствие возникновения перенапряжения на шине DC.
[0034] Если напряжение на шине DC больше второго порогового значения напряжения, то в этот момент времени определяется, что перенапряжение электронного регулятора вызвано аварийным состоянием, например перенапряжением на входе, и в данном состоянии напряжение на шине DC электронного регулятора может превышать второе пороговое значение напряжения. В этот момент времени электронный регулятор перестает выводить сигнал для управления мотором с целью прекращения работы мотора, и при этом также может генерироваться соответствующий аварийный сигнал.
[0035] Таким образом, посредством двухэтапного процесса защиты от перенапряжения, применяемого в вариантах раскрытия настоящего изобретения, с помощью эффективного контроля за состоянием перенапряжения, которое может возникнуть в ходе выполнения полета, электронный регулятор может функционировать в пределах безопасного диапазона напряжений, благодаря чему можно снизить вероятность повреждения электронных компонентов из-за перенапряжения на электронном регуляторе и, таким образом, повысить безопасность полета.
[0036] Согласно некоторым вариантам раскрытия настоящего изобретения параметр управления включает в себя заданную скорость, заданную составляющую тока по поперечной оси или заданную составляющую напряжения по поперечной оси. Другими словами, защита от перенапряжений на шине DC может выполняться различными способами, например, путем ограничения заданной скорости, заданной составляющей тока по поперечной оси или заданной составляющей напряжения по поперечной оси.
[0037] Более конкретно, в некоторых вариантах раскрытия настоящего изобретения настройка параметра управления электронного регулятора на основе разности между напряжением на шине DC и первым пороговым значением напряжения выполняется следующим образом. Параметр суперпозиции генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии с заранее заданным алгоритмом управления PI. Обработка путем наложения параметра суперпозиции и параметра управления выполняется на основе направления текущей скорости мотора таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе наложенного параметра управления.
[0038] Кроме того, в некоторых вариантах раскрытия настоящего изобретения наложение параметра суперпозиции и параметра управления на основе направления текущей скорости мотора выполняется следующим образом. При прямом направлении текущей скорости мотора параметр суперпозиции накладывается на параметр управления. При обратном направлении текущей скорости мотора отрицательное значение параметра суперпозиции накладывается на параметр управления.
[0039] Далее со ссылкой на фиг. 2-4 в соответствии с вариантами раскрытия настоящего изобретения описывается способ защиты от перенапряжений путем ограничения заданной скорости, заданной составляющей тока по поперечной оси или заданной составляющей напряжения по поперечной оси.
[0040] Согласно конкретному варианту раскрытия настоящего изобретения, как показано на фиг. 2, если параметром управления является заданная скорость, то параметр суперпозиции представляет собой суперпозиционную скорость. Параметр управления электронного регулятора настраивается на основе разности между напряжением на шине DC и первым пороговым значением напряжения следующим образом. Суперпозиционная скорость генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии с первым заранее заданным алгоритмом управления PI. Наложение суперпозиционной скорости и заданной скорости Sref выполняется на основе направления текущей скорости мотора таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе заданной суперпозиционной скорости.
[0041] Согласно одному или более вариантам раскрытия настоящего изобретения первый заранее заданный алгоритм управления PI может быть представлен следующей формулой:

где VBUS представляет напряжение на шине DC, VSET1 представляет первое пороговое значение напряжения, Ksp представляет соответствующий пропорциональный параметр управления, и KsI представляет соответствующий интегральный параметр управления.
[0042] Кроме того, перед наложением может выполняться ограничение параметра суперпозиции, такого как суперпозиционная скорость, то есть: Out∈[0,SpdMax]. Если суперпозиционная скорость больше верхнего предельного значения SpdMax первого диапазона ограничения, то суперпозиционная скорость ограничивается до величины SpdMax, а если суперпозиционная скорость меньше нижнего предельного значения 0 первого диапазона ограничения, суперпозиционная скорость ограничивается до 0.
[0043] Кроме того, наложение суперпозиционной скорости и заданной скорости Sref выполняется на основе направления текущей скорости мотора следующим образом. При прямом направлении текущей скорости мотора, то есть при Sref>0, суперпозиционная скорость накладывается на заданную скорость Sref. При обратном направлении текущей скорости мотора, то есть при Sref<0, отрицательная величина суперпозиционной скорости накладывается на заданную скорость Sref.
[0044] Более конкретно, как показано на фиг. 2, после активизации программным обеспечением функции защиты от перенапряжений, если напряжение на шине DC меньше первого порогового значения напряжения, то суперпозиционная скорость может ограничиваться значением 0 путем ограничения выходного значения ограничивающего алгоритма Out∈[0,SpdMax] таким образом, чтобы не оказывать влияние на обычный режим полета.
[0045] Если воздушное судно выполняет активное маневрирование, мотор быстро ускоряется или замедляется, и если мотор замедляется, инерция мотора с лопастями возвращает энергию в электронный регулятор, вследствие чего повышается напряжение на шине DC электронного регулятора. Чем быстрее происходит замедление, тем быстрее осуществляется возврат энергии, вследствие чего напряжение на шине DC может превысить первое пороговое значение напряжения. В этот момент времени разность между напряжением на шине DC и первым пороговым значением напряжения принимается в качестве входа первого модуля управления PI. Разность обрабатывается первым заранее заданным алгоритмом

[0046] Таким образом, заданная скорость Sref настраивается на заданное значение после наложения суперпозиционной скорости, и электронный регулятор также может управлять мотором в соответствии с заданной суперпозиционной скоростью следующим образом.
[0047] Модуль определения собирает значения Ia, Ib и Ic тока по трем фазам и значения Va, Vb и Vc напряжения на трех фазах мотора; первый блок координатного преобразования Кларка преобразует напряжения Va, Vb и Vc для получения напряжений Vα и Vβ двух фаз на основе координатного преобразования Кларка; второй блок координатного преобразования Кларка преобразует токи Ia, Ib и Ic для получения токов Iα и Iβ двух фаз на основе координатного преобразования Кларка; блок оценки позиции, такой как устройство контроля потокосцепления / скорости, на основе напряжений Vα и Vβ и тока Iα и Iβ оценивает позицию и скорость ротора мотора для получения предполагаемого угла θ ротора и предполагаемой скорости S ротора; блок координатного преобразования Парка выполняет координатное преобразование Парка значений Iα и Iβ тока на основе предполагаемого угла θ ротора для получения тока Id по продольной оси и тока Iq по поперечной оси.
[0048] Заданная скорость Sref накладывается на суперпозиционную скорость; модуль коррекции скорости выполняет коррекцию предполагаемой скорости S ротора на основе заданной суперпозиционной скорости для получения заданного тока Iqref по поперечной оси; первый блок коррекции тока на основе заданного тока Idref по продольной оси выполняет коррекцию тока Id по продольной оси для получения напряжения Vd по продольной оси; второй блок коррекции тока на основе заданного тока Iqref по поперечной оси выполняет коррекцию тока Iq по поперечной оси для получения заданного напряжения Vq по поперечной оси; блок модуляции пространственного вектора на основе предполагаемого угла в выполняет модуляцию пространственного вектора для напряжения Vd по продольной оси и напряжения Vq по поперечной оси для генерации сигнала возбуждения; приводной блок управляет мотором на основе сигнала возбуждения.
[0049] Таким образом, в процессе замедления путем наложения положительной или отрицательной суперпозиционной скорости на заданную скорость Sref может подавляться быстрое снижение заданной скорости Sref в результате чего уменьшается регенеративная энергия, возникающая вследствие быстрого замедления мотора с лопастями, сдерживается рост напряжения на шине DC и ограничивается напряжение на шине DC до величины, меньшей первого заранее заданного значения напряжения, с целью обеспечения быстрого ускорения и замедления электронного регулятора в безопасном диапазоне напряжения, чтобы предотвратить отказ электронных компонентов из-за возникновения перенапряжения на шине DC.
[0050] Кроме того, если электронный регулятор находится в аварийном состоянии, например в случае перенапряжения на входе, напряжение на шине DC может превышать второе пороговое значение напряжения. В этот момент времени электронный регулятор перестает выводить сигнал для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[0051] Согласно другому конкретному варианту раскрытия настоящего изобретения, как показано на фиг. 3, если параметром управления является заданный ток по поперечной оси, то параметр суперпозиции представляет собой суперпозиционный ток. Параметр управления электронного регулятора настраивается на основе разности между напряжением на шине DC и первым пороговым значением напряжения следующим образом. Суперпозиционный ток генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии со вторым заранее заданным алгоритмом управления PL Наложение суперпозиционного тока и заданного тока Iqref по поперечной оси выполняется на основе направления заданного тока по поперечной оси таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе заданного суперпозиционного тока по поперечной оси.
[0052] Согласно одному или более вариантам раскрытия настоящего изобретения второй заранее заданный алгоритм управления PI может задаваться следующей формулой:

где VBUS представляет напряжение на шине DC, VSET1 представляет первое пороговое значение напряжения, KIp представляет соответствующий пропорциональный параметр управления, и KII представляет соответствующий интегральный параметр управления.
[0053] Кроме того, перед обработкой путем суперпозиции может выполняться ограничение параметра суперпозиции, такого как суперпозиционный ток, то есть Out∈[0,IqMax]. Если суперпозиционный ток больше верхнего предельного значения IqMax второго диапазона ограничения, то суперпозиционный ток ограничивается до величины IqMax, а если суперпозиционный ток меньше нижнего предельного значения 0 второго диапазона ограничения, суперпозиционный ток ограничивается до 0.
[0054] Кроме того, наложение суперпозиционного тока и заданного тока по поперечной оси выполняется на основе направления заданного тока по поперечной оси следующим образом. При прямом направлении текущей скорости мотора суперпозиционный ток накладывается на заданный ток Iqref по поперечной оси. При обратном направлении текущей скорости мотора отрицательное значение суперпозиционного тока накладывается на заданный ток Iqref по поперечной оси.
[0055] Более конкретно, как показано на фиг.3, после активизации программным обеспечением функции защиты от перенапряжений, если напряжение на шине DC меньше первого порогового значения напряжения, то суперпозиционный ток может ограничиваться значением 0 путем ограничения выходного значения ограничивающего алгоритма Out∈[0,IqMax] таким образом, чтобы не оказывать влияние на обычный режим полета.
[0056] Если воздушное судно выполняет активное маневрирование, приводящее к тому, что напряжение на шине DC превышает первое пороговое значение напряжения, разность между напряжением на шине DC и первым пороговым значением напряжения принимается в качестве входа второго модуля управления PI. Разность обрабатывается вторым заранее заданным алгоритмом управления PI вида

[0057] Таким образом, заданный ток Iqref по поперечной оси настраивается на заданное значение тока по поперечной оси после наложения суперпозиционного тока, и электронный регулятор также управляет мотором в соответствии с заданным суперпозиционным током по поперечной оси. Конкретный алгоритм по существу совместим с алгоритмом управления в соответствии с заданной скоростью после наложения суперпозиционной скорости. Различие может состоять в следующем. Модуль коррекции скорости выполняет коррекцию предполагаемой скорости S ротора на основе заданной скорости для получения заданного тока Iqref по поперечной оси; заданный ток Iqref по поперечной оси накладывается на суперпозиционный ток; второй блок коррекции тока на основе заданного тока Iqref по поперечной оси после наложения выполняет коррекцию тока Iq по поперечной оси для получения заданного напряжения Vq по поперечной оси.
[0058] Кроме того, если электронный регулятор находится в аварийном состоянии, например в случае перенапряжения на входе, напряжение на шине DC может превышать второе пороговое значение напряжения. В этот момент времени электронный регулятор перестает выводить сигнал для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[0059] Если напряжение на шине DC больше второго порогового значения напряжения, выполняется управление электронным регулятором для прекращения вывода сигнала с целью остановки работы мотора.
[0060] Согласно другому конкретному варианту раскрытия настоящего изобретения, как показано на фиг. 4, если параметром управления является заданное напряжение по поперечной оси, то параметр суперпозиции представляет собой суперпозиционное напряжение. Параметр управления электронного регулятора настраивается на основе разности между напряжением на шине DC и первым пороговым значением напряжения следующим образом. Суперпозиционное напряжение генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии с третьим заранее заданным алгоритмом управления PI. Наложение суперпозиционного напряжения и заданного напряжения по поперечной оси выполняется на основе направления заданного напряжения по поперечной оси таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе заданного суперпозиционного напряжения по поперечной оси.
[0061] Согласно одному или более вариантам раскрытия настоящего изобретения, третий заранее заданный алгоритм управления PI может определяться следующей формулой:

где VBUS представляет напряжение на шине DC, VSET1 представляет первое пороговое значение напряжения, KVp представляет соответствующий пропорциональный параметр управления, и KVI представляет соответствующий интегральный параметр управления.
[0062] Кроме того, перед обработкой путем суперпозиции может выполняться ограничение параметра суперпозиции, такого как суперпозиционное напряжение, то есть Out∈[0,VqMax]. Если суперпозиционное напряжение больше верхнего предельного значения VqMax третьего диапазона ограничения, то суперпозиционное напряжение ограничивается до величины VqMax, а если суперпозиционное напряжение меньше нижнего предельного значения 0 третьего диапазона ограничения, суперпозиционное напряжение ограничивается до 0.
[0063] Кроме того, наложение суперпозиционного напряжения и заданного напряжения по поперечной оси выполняется на основе направления заданного напряжения по поперечной оси следующим образом. При прямом направлении текущей скорости мотора суперпозиционное напряжение накладывается на заданное напряжение по поперечной оси. При обратном направлении текущей скорости мотора отрицательное значение суперпозиционного напряжения накладывается на заданное напряжение по поперечной оси.
[0064] Более конкретно, как показано на фиг. 4, после активизации программным обеспечением функции защиты от перенапряжений, если напряжение на шине DC меньше первого порогового значения напряжения, то суперпозиционное напряжение может ограничиваться значением 0 путем ограничения выходного значения ограничивающего алгоритма Out∈[0,VqMax] таким образом, чтобы не оказывать влияние на обычный режим полета.
[0065] Если воздушное судно выполняет активное маневрирование, приводящее к тому, что напряжение на шине DC превышает первое пороговое значение напряжения, разность между напряжением на шине DC и первым пороговым значением напряжения принимается в качестве входного сигнала третьего модуля управления PI. Разность обрабатывается вторым заранее заданным алгоритмом управления PI вида

[0066] Таким образом, заданное напряжение Vqref по поперечной оси настраивается на заданное значение напряжения по поперечной оси после наложения суперпозиционного напряжения, и электронный регулятор также управляет мотором в соответствии с заданным суперпозиционным напряжением по поперечной оси. Конкретный алгоритм по существу совместим с алгоритмом управления в соответствии с заданной скоростью после наложения суперпозиционной скорости. Различие может состоять в следующем. Заданное напряжение Vqref по поперечной оси накладывается на суперпозиционное напряжение; блок модуляции пространственного вектора на основе предполагаемого угла θ выполняет модуляцию пространственного вектора для напряжения Vd по продольной оси и напряжения по поперечной оси после наложения для генерации сигнала возбуждения.
[0067] Кроме того, если электронный регулятор находится в аварийном состоянии, например в случае перенапряжения на входе, напряжение на шине DC может превышать второе пороговое значение напряжения. В этот момент времени электронный регулятор перестает выводить сигнал для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[0068] В целом, посредством способа защиты от перенапряжений для электронного регулятора на воздушном судне, реализованного согласно вариантам раскрытия настоящего изобретения, осуществляется сбор и оценка значений напряжения на шине DC электронного регулятора. Если напряжение на шине DC больше первого порогового значения напряжения и меньше второго порогового значения напряжения, параметр управления электронного регулятора настраивается на основе разности между напряжением на шине DC и первым пороговым значением напряжения таким образом, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC. Если напряжение на шине DC больше второго порогового значения напряжения, электронный регулятор управляется для прекращения вывода сигнала с целью остановки работы мотора. Таким образом, посредством двухэтапной защиты от перенапряжений, применяемой в соответствии с вариантами раскрытия настоящего изобретения, если напряжение на шине DC превышает первое пороговое значение напряжения, энергия, возвращаемая из мотора, уменьшается путем настройки параметра управления, в результате чего сдерживается дальнейший рост напряжения на шине DC и предотвращается повреждение или выход из строя воздушного судна из-за возможного отключения выхода электронного регулятора вследствие перенапряжения в ходе выполнения активного маневрирования.
[0069] На фиг. 5 показана блок схема устройства защиты от перенапряжений для электронного регулятора на воздушном судне в соответствии с вариантом раскрытия настоящего изобретения. Электронный регулятор сконфигурирован для управления мотором. Электронный регулятор может содержать конденсаторы, транзисторы MOSFET и другие компоненты.
[0070] Как показано на фиг. 5, в соответствии с вариантом раскрытия настоящего изобретения устройство защиты от перенапряжений содержит модуль 10 определения напряжения и модуль управления.
[0071] Модуль 10 определения напряжения сконфигурирован для определения напряжения на шине DC электронного регулятора. Следует отметить, что электронный регулятор может содержать полномостовую схему преобразователя, состоящую из шести MOSFET. Полномостовая схема преобразователя может содержать трехфазные мостовые плечи. Мостовое плечо каждой фазы может содержать два транзистора MOSFET. Напряжение на шине DC представляет собой напряжение, прикладываемое к двум MOSFET мостового плеча каждой фазы.
[0072] Модуль 20 управления сконфигурирован таким образом, что если напряжение на шине DC больше первого порогового значения напряжения и меньше или равно второму пороговому значению напряжения, параметр управления электронного регулятора настраивается на основе разницы между напряжением на шине DC и первым пороговым значением напряжения, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC.
[0073] Модуль 20 управления также сконфигурирован таким образом, чтобы если напряжение на шине DC больше второго порогового значения напряжения, электронный регулятор управлялся для прекращения вывода сигнала с целью остановки работы мотора.
[0074] Следует принимать во внимание, что конденсаторы, транзисторы MOSFET и другие компоненты электронного регулятора имеют ограничения по допустимому напряжению. Если напряжение на шине DC превышает второе пороговое значение напряжения, то напряжение, прикладываемое к конденсаторам, транзисторам MOSFET и т.д., может превысить непосредственно предельное значение напряжения, вследствие чего компоненты могут повреждаться или даже выгорать.
[0075] Согласно одному или более вариантам раскрытия настоящего изобретения функция защиты от перенапряжений электронного регулятора может активизироваться программным обеспечением модуля 20 управления, и после активизации функции защиты от перенапряжений может выполняться определение напряжения на шине DC электронного регулятора в режиме реального времени модулем 10 определения напряжения.
[0076] Если напряжение на шине DC меньше первого порогового значения напряжения, то определяется, что в этот момент времени перенапряжение на электронном регуляторе отсутствует. Защита от перенапряжений не выполняется модулем 20 управления, и электронный регулятор может управлять мотором на основе заранее заданного параметра управления. Таким образом, воздействия на обычный полет не осуществляется.
[0077] Если напряжение на шине DC превышает первое пороговое значение напряжения и не превосходит второго порогового значения напряжения, то определяется, что в этот момент времени нарастание напряжения на шине DC вызвано выполнением активного маневрирования воздушного судна, то есть при выполнении воздушным судном активных действий мотор во время полета быстро ускоряется или замедляется, и в случае замедления инерция мотора с лопастями приводит к возврату энергии в электронный регулятор, что приводит к возрастанию напряжения на шине DC. Чем быстрее происходит замедление, тем быстрее осуществляется возврат энергии, вследствие чего напряжение на шине DC может превысить первое пороговое значение напряжения. В этот момент времени модуль 20 управления может настроить параметр управления с целью уменьшения скорости изменения частоты вращения мотора для уменьшения возврата энергии мотором и сдерживания дальнейшего роста напряжения на шине DC, что может обеспечить быстрое ускорение и замедление электронного регулятора в безопасном диапазоне напряжений, чтобы предотвратить отказ электронных компонентов вследствие возникновения перенапряжения на шине DC.
[0078] Если напряжение на шине DC больше второго порогового значения напряжения, то в этот момент времени определяется, что перенапряжение электронного регулятора вызвано аварийным состоянием, например перенапряжением на входе, и в данном состоянии напряжение на шине DC электронного регулятора может превышать второе пороговое значение напряжения. В этот момент времени модуль 20 управления останавливает вывод сигнала электронного регулятора для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[0079] Таким образом, посредством двухэтапного процесса защиты от перенапряжения, применяемого в вариантах раскрытия настоящего изобретения, с помощью эффективного контроля за состоянием перенапряжения, которое может возникнуть в ходе выполнения полета, электронный регулятор может функционировать в пределах безопасного диапазона напряжений, благодаря чему можно снизить вероятность повреждения электронных компонентов из-за перенапряжения на электронном регуляторе и, таким образом, повысить безопасность полета.
[0080] Согласно некоторым вариантам раскрытия настоящего изобретения параметр управления включает в себя заданную скорость, заданную составляющую тока по поперечной оси или заданную составляющую напряжения по поперечной оси. Другими словами, защита от перенапряжений на шине DC может выполняться модулем 20 управления различными способами, например, путем ограничения заданной скорости, заданной составляющей тока по поперечной оси или заданной составляющей напряжения по поперечной оси.
[0081] В соответствии с некоторыми вариантами раскрытия настоящего изобретения модуль 20 управления также сконфигурирован для генерации параметра суперпозиции на основе разности между напряжением на шине DC и первым пороговым значением напряжения и заранее заданного алгоритма управления PI; выполнения наложения параметра суперпозиции и параметра управления на основе направления текущей скорости мотора таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе наложенного параметра управления.
[0082] Кроме того, в некоторых вариантах раскрытия настоящего изобретения модуль 20 управления также сконфигурирован для наложения параметра суперпозиции на параметр управления при прямом направлении текущей скорости мотора; и наложения отрицательного значения параметра суперпозиции на параметр управления при обратном направлении текущей скорости мотора.
[0083] Далее со ссылкой на фиг. 2-4 в соответствии с вариантами раскрытия настоящего изобретения описывается устройство защиты от перенапряжений путем ограничения заданной скорости, заданной составляющей тока по поперечной оси или заданной составляющей напряжения по поперечной оси.
[0084] Согласно конкретному варианту раскрытия настоящего изобретения, как показано на фиг. 2, если параметром управления является заданная скорость, то параметр суперпозиции представляет собой суперпозиционную скорость. Модуль 20 управления также сконфигурирован для выполнения следующих операций. Суперпозиционная скорость генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии с первым заранее заданным алгоритмом управления PI. Наложение суперпозиционной скорости и заданной скорости выполняется на основе направления текущей скорости мотора таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе заданной суперпозиционной скорости.
[0085] Согласно одному или более вариантам раскрытия настоящего изобретения первый заранее заданный алгоритм управления PI может определяться следующей формулой:

где VBUS представляет напряжение на шине DC, VSET1 представляет первое пороговое значение напряжения, Ksp представляет соответствующий пропорциональный параметр управления, и KsI представляет соответствующий интегральный параметр управления.
[0086] Кроме того, перед обработкой путем наложения модулем 20 управления может выполняться ограничение параметра суперпозиции, такого как суперпозиционная скорость, то есть:. Out∈[0,SpdMax]. Если суперпозиционная скорость больше верхнего предельного значения SpdMax первого диапазона ограничения, то суперпозиционная скорость ограничивается до величины SpdMax, а если суперпозиционная скорость меньше нижнего предельного значения 0 первого диапазона ограничения, суперпозиционная скорость ограничивается до 0.
[0087] Кроме того, при прямом направлении текущей скорости мотора, то есть если Sref>0, модуль 20 управления накладывает суперпозиционную скорость на заданную скорость Sref. При обратном направлении текущей скорости мотора то есть если Sref<0, модуль 20 управления накладывает отрицательное значение суперпозиционной скорости на заданную скорость Sref.
[0088] Более конкретно, как показано на фиг. 2, после активизации программным обеспечением функции защиты от перенапряжений, если напряжение на шине DC меньше первого порогового значения напряжения, то модуль 20 управления может ограничивать суперпозиционную скорость значением 0 путем ограничения выходного значения ограничивающего алгоритма Out∈[0,SpdMax] модуля 202 ограничения, чтобы не оказывать влияние на обычный режим полета.
[0089] Если воздушное судно выполняет активное маневрирование, мотор быстро ускоряется или замедляется, и если мотор замедляется, инерция мотора с лопастями возвращает энергию в электронный регулятор, вследствие чего повышается напряжение на шине DC электронного регулятора. Чем быстрее происходит замедление, тем быстрее осуществляется возврат энергии, вследствие чего напряжение на шине DC может превысить первое пороговое значение напряжения. В этот момент времени разность между напряжением на шине DC и первым пороговым значением напряжения принимается в качестве входного сигнала первого модуля 201 управления PI. Разность обрабатывается первым заранее заданным алгоритмом

[0090] Таким образом, заданная скорость Sref настраивается на заданное значение после наложения суперпозиционной скорости, и электронный регулятор также может управлять мотором в соответствии с заданной суперпозиционной скоростью следующим образом.
[0091] Модуль 301 определения определяет значения тока Ia, Ib и Ic по трем фазам и значения напряжения Va, Vb и Vc на трех фазах мотора; первый блок 302 координатного преобразования Кларка преобразует напряжения Va, Vb и Vc для получения напряжений Vα и Vβ двух фаз на основе координатного преобразования Кларка; второй блок 303 координатного преобразования Кларка преобразует токи Ia, Ib и Ic для получения токов Iα и Iβ двух фаз на основе координатного преобразования Кларка; блок 304 оценки позиции, такой как устройство контроля потокосцепления / скорости, на основе напряжений Vα и Vβ и тока Iα и Iβ оценивает позицию и скорость ротора мотора для получения предполагаемого угла θ ротора и предполагаемой скорости S ротора; блок 305 координатного преобразования Парка выполняет координатное преобразование Парка значений тока Iα и Iβ на основе предполагаемого угла θ ротора для получения тока Id по продольной оси и тока Iq по поперечной оси.
[0092] Заданная скорость Sref накладывается на суперпозиционную скорость; модуль 306 коррекции скорости выполняет коррекцию предполагаемой скорости S ротора на основе заданной суперпозиционной скорости для получения заданного тока Iqref по поперечной оси; первый блок 307 коррекции тока на основе заданного тока Idref по продольной оси выполняет коррекцию тока Id по продольной оси для получения напряжения Vd по продольной оси; второй блок 308 коррекции тока на основе заданного тока Iqref по поперечной оси выполняет коррекцию тока Iq по поперечной оси для получения заданного напряжения Vq по поперечной оси; блок 309 модуляции пространственного вектора на основе предполагаемого угла в выполняет модуляцию пространственного вектора напряжения Vd по продольной оси и напряжения Vq по поперечной оси для генерации сигнала возбуждения; приводной блок 310 управляет мотором на основе сигнала возбуждения.
[0093] Таким образом, в процессе замедления путем наложения положительной или отрицательной суперпозиционной скорости на заданную скорость Sref может подавляться быстрое снижение заданной скорости Sref в результате чего уменьшается регенеративная энергия, возникающая вследствие быстрого замедления мотора с лопастями, сдерживается рост напряжения на шине DC и ограничивается напряжение на шине DC до величины, меньшей первого заранее заданного значения напряжения, с целью обеспечения быстрого ускорения и замедления электронного регулятора в безопасном диапазоне напряжения, чтобы предотвратить отказ электронных компонентов из-за возникновения перенапряжения на шине DC.
[0094] Кроме того, если электронный регулятор находится в аварийном состоянии, например в случае перенапряжения на входе, напряжение на шине DC может превышать второе пороговое значение напряжения. В этот момент времени модуль 20 управления останавливает вывод сигнала электронного регулятора для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[0095] Согласно другому конкретному варианту раскрытия настоящего изобретения, как показано на фиг. 3, если параметром управления является заданный ток по поперечной оси, то параметр суперпозиции совмещения представляет собой суперпозиционный ток. Модуль 20 управления сконфигурирован для выполнения следующих операций. Суперпозиционный ток генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии со вторым заранее заданным алгоритмом управления PL Наложение суперпозиционного тока и заданного тока по поперечной оси выполняется на основе направления заданного тока по поперечной оси таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе заданного суперпозиционного тока по поперечной оси.
[0096] Согласно одному или более вариантам раскрытия настоящего изобретения второй заранее заданный алгоритм управления PI может определяться следующей формулой:

где VBUS представляет напряжение на шине DC, VSET1 представляет первое пороговое значение напряжения, KIp представляет соответствующий пропорциональный параметр управления, и KII представляет соответствующий интегральный параметр управления.
[0097] Кроме того, перед обработкой путем наложения модулем 20 управления может выполняться ограничение параметра суперпозиции, такого как суперпозиционный ток, то есть Out∈[0,IqMax]. Если суперпозиционный ток больше верхнего предельного значения IqMax второго диапазона ограничения, то суперпозиционный ток ограничивается до величины IqMax, а если суперпозиционный ток меньше нижнего предельного значения 0 второго диапазона ограничения, суперпозиционный ток ограничивается до 0.
[0098] Кроме того, при прямом направлении текущей скорости мотора модуль 20 управления накладывает суперпозиционный ток на заданный ток по поперечной оси. При обратном направлении текущей скорости мотора модуль 20 управления накладывает отрицательное значение суперпозиционного тока на заданный ток по поперечной оси.
[0099] Более конкретно, как показано на фиг.3, после активизации программным обеспечением функции защиты от перенапряжений, если напряжение на шине DC меньше первого порогового значения напряжения, то модуль 20 управления может ограничивать суперпозиционный ток до 0 путем ограничения выходного значения ограничивающего алгоритма Out∈[0,IqMax] второго модуля 205 ограничения таким образом, чтобы не оказывать влияние на обычный режим полета.
[00100] Если воздушное судно выполняет активное маневрирование, в результате которого напряжение на шине DC превышает первое пороговое значение напряжения, то разность между напряжением на шине DC и первым пороговым значением напряжения принимается в качестве входного сигнала второго модуля 205 управления PI. Разность обрабатывается вторым заранее заданным алгоритмом

[00101] Таким образом, заданный ток Iqref по поперечной оси настраивается на заданное значение тока по поперечной оси после наложения суперпозиционного тока, и электронный регулятор также управляет мотором в соответствии с заданным суперпозиционным током по поперечной оси. Конкретный алгоритм работы модуля 20 управления по существу совместим с алгоритмом управления в соответствии с заданной скоростью после наложения суперпозиционной скорости. Различие может состоять в следующем. Модуль 306 коррекции скорости выполняет коррекцию предполагаемой скорости S ротора на основе заданной скорости для получения заданного тока Iqref по поперечной оси; заданный ток Iqref по поперечной оси накладывается на суперпозиционный ток; второй блок 305 коррекции тока на основе заданного тока Iqref по поперечной оси после наложения выполняет коррекцию тока Iq по поперечной оси для получения заданного напряжения Vq по поперечной оси.
[00102] Кроме того, если электронный регулятор находится в аварийном состоянии, например в случае перенапряжения на входе, напряжение на шине DC может превышать второе пороговое значение напряжения. В этот момент времени модуль 20 управления останавливает вывод сигнала электронного регулятора для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[00103] Если напряжение на шине DC больше второго порогового значения напряжения, выполняется управление электронным регулятором для прекращения вывода сигнала с целью остановки работы мотора.
[00104] Согласно другому конкретному варианту раскрытия настоящего изобретения, как показано на фиг. 4, если параметром управления является заданное напряжение по поперечной оси, то параметр суперпозиции представляет собой суперпозиционное напряжение. Модуль 20 управления сконфигурирован для выполнения следующих операций. Суперпозиционное напряжение генерируется на основе разности между напряжением на шине DC и первым пороговым значением напряжения в соответствии с третьим заранее заданным алгоритмом управления PI. Наложение суперпозиционного напряжения и заданного напряжения по поперечной оси выполняется на основе направления заданного напряжения по поперечной оси таким образом, чтобы электронный регулятор управлял скоростью вращения мотора на основе заданного суперпозиционного напряжения по поперечной оси.
[00105] Согласно одному или более вариантам раскрытия настоящего изобретения третий заранее заданный алгоритм управления PI может обозначаться следующей формулой:

где VBUS представляет напряжение на шине DC, VSET1 представляет первое пороговое значение напряжения, KVp представляет соответствующий пропорциональный параметр управления, и KVI представляет соответствующий интегральный параметр управления.
[00106] Кроме того, перед обработкой путем наложения модулем 20 управления может выполняться ограничение параметра суперпозиции, такого как суперпозиционное напряжение, то есть Out∈[0,VqMax]. Если суперпозиционное напряжение больше верхнего предельного значения VqMax третьего диапазона ограничения, то суперпозиционное напряжение ограничивается до величины VqMax, а если суперпозиционное напряжение меньше нижнего предельного значения 0 третьего диапазона ограничения, суперпозиционное напряжение ограничивается до 0.
[00107] Кроме того, при прямом направлении текущей скорости мотора модуль 20 управления накладывает суперпозиционное напряжение на заданное напряжение по поперечной оси. При обратном направлении текущей скорости мотора модуль 20 управления накладывает отрицательное значение суперпозиционного напряжения на заданное напряжение по поперечной оси.
[00108] Более конкретно, как показано на фиг. 4, после активизации программным обеспечением функции защиты от перенапряжений, если напряжение на шине DC меньше первого порогового значения напряжения, то модуль 20 управления может ограничивать суперпозиционное напряжение значением 0 путем ограничения выходного значения ограничивающего алгоритма Out∈[0,VqMax] третьего модуля 208 ограничения таким образом, чтобы не оказывать влияние на обычный режим полета.
[00109] Если воздушное судно выполняет активное маневрирование, в результате которого напряжение на шине DC превышает первое пороговое значение напряжения, то разность между напряжением на шине DC и первым пороговым значением напряжения принимается в качестве входа третьего модуля 207 управления PI. Разность обрабатывается вторым заранее заданным алгоритмом

[00110] Таким образом, заданное напряжение Vqref по поперечной оси настраивается на заданное значение напряжения по поперечной оси после наложения суперпозиционного напряжения, и электронный регулятор также управляет мотором в соответствии с заданным суперпозиционным напряжением по поперечной оси. Конкретный алгоритм работы модуля 20 управления по существу совместим с алгоритмом управления в соответствии с заданной скоростью после наложения суперпозиционной скорости. Различие может состоять в следующем. Заданное напряжение Vqref по поперечной оси накладывается на суперпозиционное напряжение; блок модуляции 309 модуляции пространственного вектора на основе предполагаемого угла в выполняет модуляцию пространственного вектора напряжения Vd по продольной оси и напряжения по поперечной оси после наложения для генерации сигнала возбуждения.
[00111] Кроме того, если электронный регулятор находится в аварийном состоянии, например в случае перенапряжения на входе, напряжение на шине DC может превышать второе пороговое значение напряжения. В этот момент времени модуль 20 управления останавливает вывод сигнала электронного регулятора для управления мотором с целью прекращения работы мотора, при этом также может генерироваться соответствующий аварийный сигнал.
[00112] В целом, посредством устройства защиты от перенапряжений для электронного регулятора на воздушном судне, реализованного согласно вариантам раскрытия настоящего изобретения, модулем определения напряжения выполняется определение напряжения на шине DC электронного регулятора, которые анализируются модулем управления. Если напряжение на шине DC больше первого порогового значения напряжения и меньше второго порогового значения напряжения, параметр управления электронного регулятора настраивается модулем управления на основе разности между напряжением на шине DC и первым пороговым значением напряжения таким образом, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC. Если напряжение на шине DC больше второго порогового значения напряжения, электронный регулятор управляется модулем управления для прекращения вывода сигнала с целью остановки работы мотора. Таким образом, посредством двухэтапной защиты от перенапряжений, применяемой в соответствии с вариантами раскрытия настоящего изобретения, если напряжение на шине DC превышает первое пороговое значение напряжения, энергия, возвращаемая из мотора, уменьшается путем настройки параметра управления, в результате чего сдерживается дальнейший рост напряжения на шине DC и предотвращается повреждение или выход из строя воздушного судна из-за возможного отключения выхода электронного регулятора вследствие перенапряжения в ходе выполнения воздушным судном активного маневрирования.
[00113] Кроме того, в рамках раскрытия настоящего изобретения предлагается воздушное судно. Воздушное судно содержит устройство защиты от перенапряжений электронного регулятора на воздушном судне.
[00114] На воздушном судне, реализованном согласно вариантам раскрытия настоящего изобретения, на основе устройства защиты от перенапряжений, соответствующего приведенным выше вариантам осуществления, возможно устранить повреждение и выход из строя воздушного судна вследствие отключения выхода электронного регулятора из-за перенапряжений, возникающих в ходе выполнения активного маневрирования.
[00115] Следует принимать во внимание, что в описании настоящего изобретения такие термины, как "центр", "продольное направление", "поперечное направление", "длина", "ширина", "толщина", "выше", "ниже", "спереди", "сзади", "слева", "справа", "вертикальное направление", "горизонтальное направление", "сверху", "снизу", "внутри", "снаружи", "по часовой стрелке", "против часовой стрелки", "по направлению оси", "в радиальном направлении" и "по окружности" обозначают относительные направления и местоположения, показанные на чертежах для упрощенного описания раскрытия настоящего изобретения, и эти термины не подразумевают указания на то, что устройство или элементы расположены в этих конкретных направлениях или структурированы и выполнены для функционирования в этих конкретных направлениях, вследствие чего такие термины не должны рассматриваться в качестве ограничения настоящего изобретения.
[00116] Кроме того, такие термины, как "первый" и "второй", используются с целью описания и не обозначают или не подразумевают относительную важность или значение объекта. Помимо этого, признак, описанный с использованием терминов "первый" и "второй", может явно или неявно включать в себя один или более таких признаков. В описании раскрытия настоящего изобретения термин "множество из" означает два или более, если не указано иное.
[00117] В раскрытии настоящего изобретения, если не указано иное или не введено ограничение, термины "установлен", "подключен", "соединен" и "зафиксирован" следует понимать в широком смысле значений, например, в отношении фиксированных, съемных или интегрированных крепежей, подключений и соединений, которые также могут представлять собой механические или электрические крепежи, подключения и соединения, реализованные непосредственно и с использованием среды передачи, и кроме того, могут представлять собой внутренние крепежи, подключения и соединения двух компонентов или отношения взаимодействия между двумя компонентами, которые могут быть понятны специалистам в этой области техники в соответствии с подробным описанием вариантов раскрытия настоящего изобретения.
[00118] В раскрытии настоящего изобретения, если не указано иное или не введено ограничение, обозначение первой характеристики "над" или "под" второй характеристикой указывает на то, что первая и вторая характеристики могут непосредственно или косвенно через среду передачи крепиться, подключаться или связываться. Кроме того, если первая характеристика находится "на", "над", "поверх" второй характеристики, то это может означать, что первая характеристика находится непосредственно над второй характеристикой или расположена по диагонали над второй характеристикой, или это просто может указывать на то, что высота по горизонтали первой характеристики больше высоты по горизонтали второй характеристики. Если в описании указано, что первая характеристика находится "ниже" или "под" второй характеристикой, то это может означать, что первая характеристика находится непосредственно под второй характеристикой или расположена по диагонали под второй характеристикой, или это просто может указывать на то, что высота по горизонтали первой характеристики меньше высоты по горизонтали второй характеристики.
[00119] В рамках описания настоящего изобретения такие термины, как "вариант осуществления", "некоторые варианты осуществления", "пример" или "некоторые примеры", означают, что определенный признак, структура, материал или характеристика, описанные в связи с вариантом или примером, включены по меньшей мере в один вариант или пример раскрытия настоящего изобретения. Таким образом, появление этих фраз в различных местах настоящего описания не обязательно указывают на одинаковые варианты осуществления или примеры раскрытия изобретения. Кроме того, описанные признаки, структуры, материалы или характеристики могут комбинироваться любым подходящим образом в одном или более вариантах или примерах осуществления настоящего изобретения. Специалисты в этой области техники способны непротиворечиво объединить различные варианты или примеры и признаки различных вариантов или примеров раскрытия настоящего изобретения.
[00120] Хотя выше проиллюстрированы и описаны примеры вариантов осуществления настоящего изобретения, специалистам в этой области техники будет понятно, что эти варианты не следует толковать как ограничивающие раскрытие настоящего изобретения, и в эти варианты могут вноситься изменения, альтернативные решения и модификации в рамках настоящего изобретения.
Реферат
Использование: в области электротехники. Технический результат - предотвращение повреждения или выхода из строя воздушного судна из-за возможного отключения выхода электронного регулятора вследствие перенапряжения в ходе выполнения воздушным судном активного маневрирования. Электронный регулятор сконфигурирован для управления мотором. Способ включает: определение напряжения на шине DC электронного регулятора; если напряжение на шине DC больше первого порогового значения напряжения и меньше или равно второму пороговому значению напряжения, осуществляют настройку параметра управления электронного регулятора на основе разности между напряжением на шине DC и первым пороговым значением напряжения таким образом, чтобы электронный регулятор управлял мотором на основе настроенного параметра управления для сдерживания дальнейшего роста напряжения на шине DC, при этом второе пороговое значение напряжения больше первого порогового значения напряжения. 3 н. и 8 з.п. ф-лы, 5 ил.
Комментарии