Система и способ автоматического документирования ситуаций при полевых работах - RU2605775C2
Код документа: RU2605775C2
Чертежи
Описание
Изобретение относится к системе автоматического документирования ситуаций во время полевых работ, включающей в себя:
по меньшей мере один датчик рабочих параметров для регистрации одного рабочего параметра сельскохозяйственной машины во время полевых работах и/или по меньшей мере один датчик урожайности для регистрации свойства урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной во время полевых работ, и
вычислительное устройство, снабженное датчиком рабочих параметров и/или датчиком урожайности, которое запрограммировано для того, чтобы при наступлении заданного условия принимаемых сигналов датчика рабочих параметров и/или датчика урожайности генерировать сигнал срабатывания, изобретение также относится к соответствующему способу.
Предшествующий уровень техники
В настоящее время машины, применяемые для сельскохозяйственных полевых работ, обслуживаются зачастую, и в частности, из-за требования по сокращению расходов, не очень хорошо обученным и проинструктированным вспомогательным персоналом. Специалист (например, агроном или руководитель производства) лишь редко находится на поле, чтобы контролировать или проверять окружающие условия и выполнение полевых работ. В этих обстоятельствах специалисту впоследствии во многих случаях невозможно выяснить, почему наступили нежелательные или непредусмотренные события, такие как, например, сбор с поля урожая с очень низкой урожайностью. Такого рода события могут иметь различные причины, такие как отсутствие или недостаток высеянных количеств семенного материала, недостаточное или чрезмерное снабжение водой, потрава дичью, неправильное применение агрохимикатов или плохая почва.
В уровне техники известны системы, которые позволяют оператору уборочной машины ставить так называемые отметки. Нажатием кнопки на карте сохраняется отметка с географической привязкой, которая дополнительно может снабжаться речевыми комментариями, чтобы иметь возможность документировать и позднее целенаправленно вести борьбу, например, с местами скученного произрастания сорняков, поражением насекомыми, недостаточным стоком воды и прочим (EP 1659366 A2). Эти системы требуют от оператора достаточных специальных знаний, чтобы сначала вообще суметь распознать ситуацию, а затем еще и суметь правильно ее оценить, и поэтому не подходят для применения не очень хорошо обученным вспомогательным персоналом.
Кроме того, предлагалось записывать видеоданные камеры с соответствующими данными положения для всего поля, чтобы на основании изображений позднее иметь возможность идентифицировать и, при необходимости, устранять сорняки (DE 4329343 A1). При этом создается огромное количество информации, аналитическая оценка которых, с одной стороны, возможна только машинным способом и из которых, с другой стороны, действительно необходимым является, как правило, минимальное количество данных.
Заявка DE 1020406 A1, являющаяся ближайшим аналогом изобретения, описывает самоходную уборочную машину, снабженную средствами для контроля переработки урожая и линией передачи, по которой ошибки переработки собранного урожая передаются на удаленную станцию, которая, в свою очередь, информирует компьютер собственника уборочной машины об этих ошибках и позволяет последнему изменять регулировки уборочной машины. Хотя таким образом и возможно улучшить неоптимальные настройки уборочной машины, однако собственнику уборочной машины невозможно получить подробные данные о поле и имеющемся в данном случае урожае.
Задача
Было бы желательно эффективным образом предоставлять специалисту (агроному или руководителю производства и так далее) данные, с помощью которых он сможет анализировать и при необходимости устранять причины ситуаций во время полевых работ.
Положенная в основу изобретения задача состоит, таким образом, в том, чтобы предоставить усовершенствованную систему и способ автоматического документирования ситуаций во время полевых работ, которая или, соответственно, который не обладает изложенными недостатками уровня техники или обладает ими лишь в незначительной степени.
Решение
Эта задача в соответствии с изобретением решается с помощью признаков пп. 1, 14 и 15 формулы изобретения, причем в других пунктах формулы изобретения приведены признаки, характеризующие предпочтительные усовершенствованные варианты выполнения изобретения.
Система автоматического документирования ситуаций во время полевых работ включает в себя по меньшей мере один датчик рабочих параметров для регистрации одного рабочего параметра сельскохозяйственной машины во время полевых работ и/или по меньшей мере один датчик урожайности для регистрации свойства урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной во время полевых работ. Кроме того, с датчиком рабочих параметров и/или датчиком урожайности соединено вычислительное устройство и запрограммировано для того, чтобы при наступлении заданного условия принимаемых сигналов датчика рабочих параметров и/или датчика урожайности генерировать сигнал срабатывания. Вычислительное устройство соединено, кроме того, с устройством записи изображений для генерирования сигнала изображения сельскохозяйственной машины и/или ее окружения и сохраняет в памяти упомянутые сигналы изображения, в качестве отклика на сигнал срабатывания, с географической привязкой, и/или передает их по линии передачи в удаленное место.
Таким образом, во время полевых работ с помощью вычислительного устройства автоматически распознается ситуация, представляющая интерес для позднейшей аналитической оценки, при этом сигналы датчика рабочих параметров и/или датчика урожайности сравниваются с заданным условием. Именно тогда, когда создается такого рода сигнал срабатывания, сохраняется сигнал изображения устройства записи изображений, которое осуществляет оптический контроль за сельскохозяйственной машиной и/или ее окружением с целью дальнейшей аналитической оценки ситуации и ее причины, а также, при необходимости, тех мер, которые должны быть приняты. Альтернативно или дополнительно сигнал изображения по линии передачи передается в удаленное место, которое, в частности, может находиться во дворе сельскохозяйственной машины или владельца поля, так что агроном, руководитель производства или подрядчик может своевременно анализировать ситуацию и, при необходимости, принимать решения о дальнейших действиях. Соответственно благодаря настоящему изобретению упрощается отслеживание ситуаций во время полевых работ без сбора ненужного огромного количества информации.
Это заданное условие может, например, наступить, когда сигналы датчика рабочих параметров и/или датчика урожайности отклоняются более чем на некоторую пороговую величину от номинального значения, которое, в частности, может быть статическим и жестко заданным или браться из карты, на которой сохранены сравнимые данные предшествующих рабочих процессов. Другим возможным условием может быть отклонение принимаемых сигналов датчика рабочих параметров и/или датчика урожайности более чем на некоторую пороговую величину от максимального или минимального значения, зарегистрированного ранее во время работы на соответствующем поле. Благодаря этому возможна регистрация экстремумов поля, при этом сохраненные ранее сигналы изображения ранее задокументированной ситуации, более уже не рассматриваемой в качестве экстремальной, удаляются или остаются сохраненными в памяти. Возможно также подавать сигнал срабатывания, когда принимаемые сигналы датчика рабочих параметров и/или датчика урожайности попадают под некоторый заданный класс. Благодаря этому для отдельных классов, которые, например, могут соответствовать низкой, средней или высокой урожайности или различным классам почвы или различным топографическим условиям поля, могут сохраняться репрезентативные сигналы изображения.
Устройство записи изображений может, в частности, включать в себя камеру для записи неподвижных и/или подвижных изображений, чувствительную к видимому, и/или инфракрасному, и/или ультрафиолетовому диапазону длин волн, и/или сканирующий лазерный дальномер, и/или сканирующий радарный датчик. Таким образом, могут получаться неподвижные или подвижные изображения области перед и/или позади машины и/или потока собранного урожая в машине. Устройство записи изображений целесообразным образом направляется на ту область машины, которая в каждом случае может дать наиболее ценную информацию для анализа ситуации. При обработке почвы она соответственно направляется на почвообрабатывающие инструменты сельскохозяйственной машины, в то время как в случае уборочной машины она направлена на насаждения, находящиеся перед уборочной машиной, или на поток продукции внутри уборочной машины.
Вычислительное устройство может, в качестве отклика на сигнал срабатывания, сохранять в памяти и/или передавать в удаленное место дополнительные сигналы, которые, например, содержат принимаемые сигналы датчика рабочих параметров и/или датчика урожайности, и/или погодные условия, и/или информацию о соответствующем операторе машины, и/или момент времени сигнала срабатывания. Эти дополнительные сигналы могут облегчать анализ ситуации.
Датчик урожайности регистрирует, например, производительность, и/или содержание компонентов, и/или цвет собранного урожая. Датчик рабочих параметров регистрирует, например, приводную мощность и/или приводное усилие приводного или перемещаемого по полю элемента (например, почвообрабатывающего инструмента) машины.
Предпочтительно вычислительное устройство генерирует различные сигналы срабатывания для различных условий принимаемых сигналов датчика рабочих параметров и/или датчика урожайности и, в зависимости от соответствующего сигнала срабатывания, сохраняет в памяти различные сигналы изображения и при необходимости дополнительные сигналы или, соответственно, передает их в удаленное место. Соответственно, могут регистрироваться и классифицироваться различные виды ситуаций и, в зависимости от вида ситуации, могут предоставляться различные данные для дальнейшей обработки. Так, например, при низкой производительности сбора урожая изображение поля перед уборочной машиной может сохраняться в памяти или передаваться при необходимости вместе с сигналами измерительного устройства, предназначенного для регистрации компонентов собранного урожая, для того чтобы возможно было проанализировать агрономическое условия соответствующего места на поле; в то время как при высоких потерях во время обмолота и очистки в зерноуборочном комбайне в памяти сохраняются или передаются другие данные относительно производительности и настроек молотильного барабана и очистки, для того чтобы возможно было проанализировать настройку зерноуборочного комбайна.
Вычислительное устройство предпочтительно соединено с устройством ввода, с помощью которого могут вводиться и/или изменяться условия сигналов датчика рабочих параметров и/или датчика урожайности, приводящие к генерированию сигнала срабатывания, и/или могут вводиться и/или изменяться сигналы изображения и при необходимости дополнительные сигналы, сохраненные и/или переданные при генерировании сигнала срабатывания. Оператор или другое уполномоченное лицо может, таким образом, предпочтительно после ввода пароля или другого опознавательного признака (например, отпечатка пальца, сканирования лица или глаз, идентификационного чипа) определить, при каких условиях подается сигнал срабатывания. Кроме того, может определяться, какие сигналы изображения и при необходимости дополнительные сигналы при сигнале срабатывания сохраняются в памяти или, соответственно, передаются. В данном случае, как упомянуто в предыдущем абзаце, различные сигналы срабатывания могут отличаться для различных ситуаций. Но в другом варианте осуществления условия и сигналы, сохраненные в памяти или, соответственно, переданные, могут быть также статичными и жестко заданными.
Вычислительное устройство может отмечать сигналы изображения на карте урожайности. При аналитической оценке уборочного процесса соответственно в тех местах карты урожайности, в которых обнаруживаются ситуации, задокументированные в виде изображений, содержатся соответствующие отметки. При активизации нажатием на отметки специалист, выполняющий аналитическую оценку, может отображать сохраненные в памяти сигналы изображения и, при необходимости, другие данные. Анализ отображенных сигналов изображения и данных может осуществляться специалистом в одиночку или с помощью программного обеспечения, которое в усовершенствованной версии автоматически на основании сигналов изображения и данных предлагает действия по разрешению ситуации.
Также предоставляется возможность непрерывно помещать сигналы изображения во временную память, и только при генерировании сигнала срабатывания переносить сигналы изображения, поступающие в течение предварительно заданного промежутка времени до и после пускового сигнала, в постоянную память. Благодаря этому обеспечивается также возможность аналитической оценки сигналов изображения, которые были получены незадолго до подачи сигнала срабатывания, потому что они во многих случаях дают возможность сделать заключение о причине возникновения ситуации.
Система согласно изобретению может, в частности, применяться на уборочных машинах, например, зерноуборочных комбайнах, тюковых прессах или полевых измельчителях, которые являются самодвижущимися или буксируемыми транспортным средством или монтированными к транспортному средству, а также на любых других сельскохозяйственных машинах, предназначенных, в частности, для обработки почвы или для удобрения, сеяния и для разбрасывания химикатов, которые являются самодвижущимися или буксируемыми транспортным средством или монтированными к транспортному средству.
Пример осуществления
На чертежах изображен описанный ниже более подробно пример осуществления изобретения. Показано:
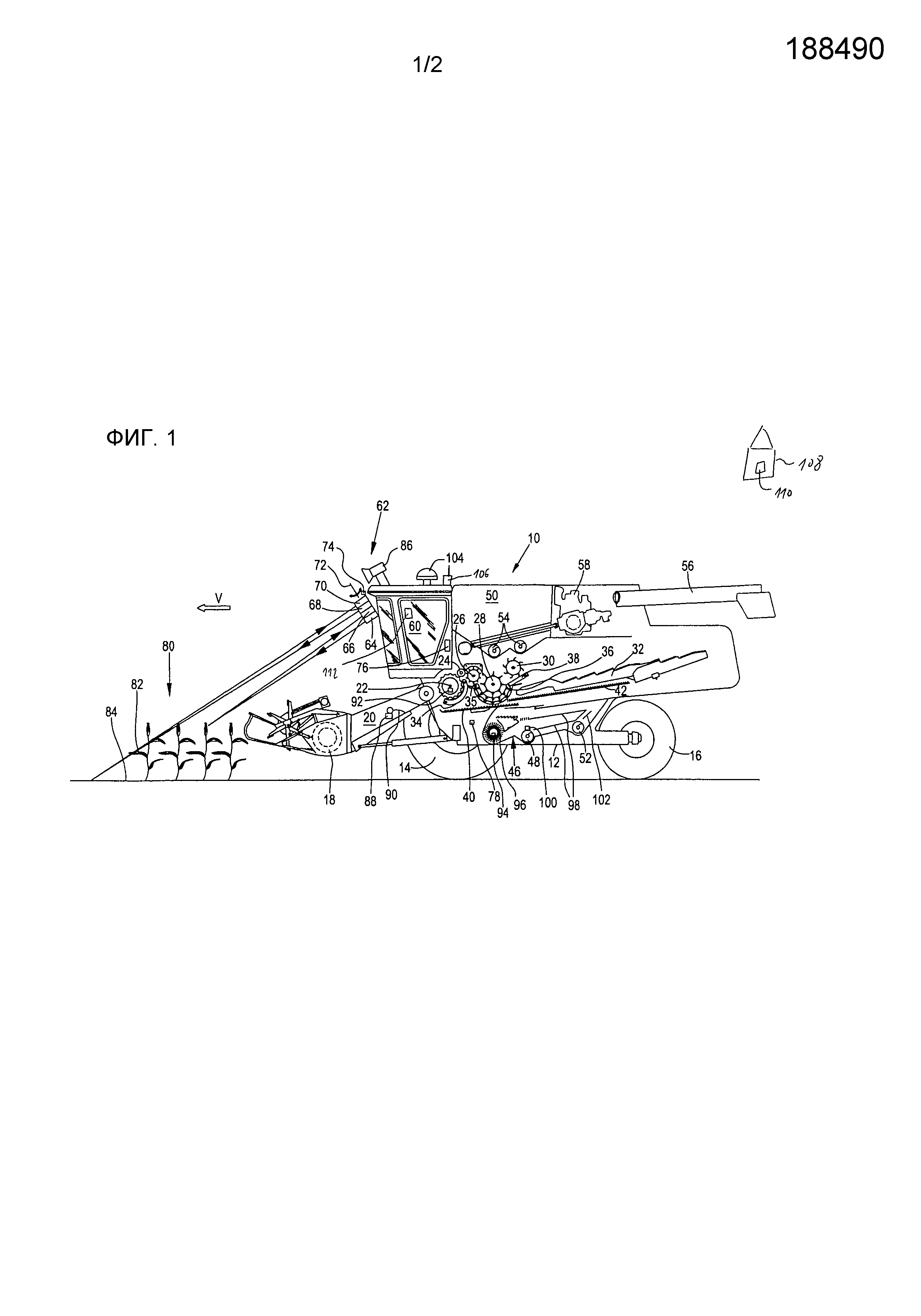
фиг.1 - вид сбоку уборочной машины, снабженной системой автоматического документирования ситуаций во время полевых работ согласно изобретению, и
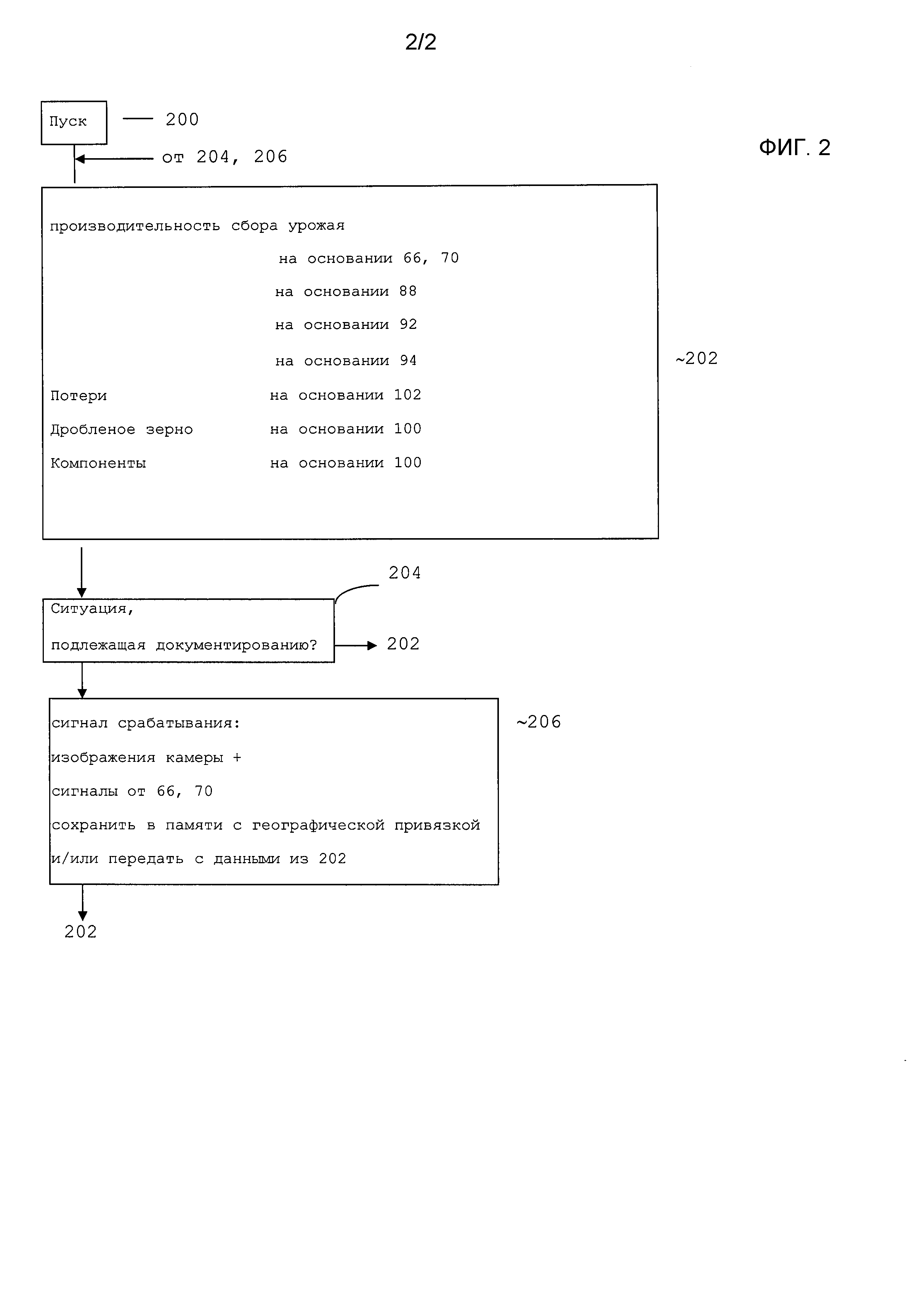
фиг.2 - блок-схема последовательности действий, по которой работает система.
На фиг.1 показана сельскохозяйственная машина 10 в виде самодвижущегося зерноуборочного комбайна, снабженного рамой 12, которая при помощи приводных передних колес 14 и управляемых задних колес 16 опирается на землю и передвигается с их помощью. Колеса 14 приводятся во вращение посредством непоказанных приводных средств, чтобы перемещать сельскохозяйственную машину 10, например, по полю, с которого должен сниматься урожай. Ниже данные направлений, такие как переднее и заднее, указаны относительно направления V движения сельскохозяйственной машины 10 при уборке урожая.
К передней концевой области сельскохозяйственной машины 10 присоединено с возможностью съема устройство 18 уборки урожая в виде жатвенного механизма, чтобы во время уборки урожая убирать с поля урожай, представляющий собой пшеницу или другой вымолачиваемый стебельчатый материал, и подавать его вверх и назад по наклонному транспортеру 20 в снабженный несколькими барабанами молотильный агрегат, который включает в себя последовательно расположенные в направлении V движения молотильный барабан 22, счищающий барабан 24, работающий с верхним ходом подающий барабан 26, тангенциальный сепаратор 28, а также реверсивный барабан 30. Ниже по потоку от реверсивного барабана 30 находится соломотряс 32. Молотильный барабан 22 в своей нижней и задней области окружен декой 34 молотильного барабана. Под подающим барабаном 26 расположен снабженный отверстиями или закрытый кожух 35, в то время как над подающим барабаном 26 расположен неподвижно установленный кожух, а под тангенциальным сепаратором 28 находится короб 36 сепаратора, снабженный переставными пальцевыми элементами. Под реверсивным барабаном 30 расположена пальцевая решетка 38.
Содержащая зерна и примеси смесь, проходящая сквозь деку 34 молотильного барабана, короб 36 сепаратора и соломотряс 32, попадает посредством опорных поверхностей транспортеров 40, 42 в очистительное устройство 46, снабженное воздуходувкой 96 и решетами 98. Пшеница, очищенная с помощью очистительного устройства 46, посредством зернового шнека 48 подается в непоказанный элеватор, который транспортирует ее в зерновой бункер 50. Шнек 52 для отвода схода возвращает невымолоченные части колосьев через другой непоказанный элеватор обратно в молотильный процесс. Полова может с задней стороны верхнего решета 98 выбрасываться через вращающийся распределитель половы, или она выгружается посредством соломорезки (на чертеже не изображена), расположенной ниже по потоку от соломотряса 32. Очищенная пшеница из зернового бункера 50 может выгружаться посредством выгрузной системы, снабженной поперечными шнеками 54 и выгрузным транспортером 56.
Привод указанных систем осуществляется посредством двигателя 58 внутреннего сгорания, а контроль и управление осуществляются оператором из кабины 60 водителя. Разные устройства для молотьбы, транспортировки, очистки и сепарации находятся внутри рамы 12. Вне рамы 12 находится наружный корпус, наибольшая часть которого может откидываться. Остается заметить, что изображенный в данном случае молотильный агрегат, снабженный несколькими барабанами, является только одним из примеров осуществления. Его можно также заменить одним единственным молотильным барабаном, расположенным поперек, и сепарирующим устройством, снабженным соломотрясом или одним или несколькими сепарирующими роторами, или его можно заменить молотильно-сепарирующим устройством, работающим в осевом потоке.
С передней стороны кабины 60 водителя вблизи крыши расположена система 62 датчиков, которая соединена с вычислительным устройством 76. Измерительное устройство 62 могло бы также располагаться на устройстве 18 для уборки урожая. Вычислительное устройство 76 соединено с устройством 78 для задания скорости (например, регулирующее устройство для наклонного диска гидравлического насоса, которое выполнено с проводящим гидравлическую жидкость соединением с гидромотором, осуществляющим привод колес 14), которое предназначено для регулирования скорости продвижения сельскохозяйственной машины 10.
Измерительное устройство 62 включает в себя первый передатчик 64, первый приемник 66, второй передатчик 68 и второй приемник 70, которые вместе выполнены с возможностью вращения посредством поворотного привода 74 вокруг примерно вертикальной, слегка наклоненной вперед оси 72. Во время работы электромагнитные волны, посылаемые передатчиками 64, 68, перекрывают область измерения перед зерноуборочным комбайном 10, при этом передатчики 64, 68 и приемники 66, 70 (или только их элементы, излучающие и/или принимающие волны) поворачиваются вокруг оси 72. Благодаря этому поле 80 с находящимися на нем растениями 82 постепенно перекрывается вдоль направления измерения, которое проходит в виде дуг в форме сегмента круга перед комбайном 10.
Первый передатчик 64 излучает электромагнитные первые волны в виде света в (близком) инфракрасном или видимом диапазоне волн, в то время как первый приемник 66 чувствителен только к этому свету. Вследствие выбранной длины волны свет отражается от растений 82, когда он попадает на них. Когда свет, напротив, попадает в промежуток между растениями (например, в местах редких или отсутствующих насаждений) на поверхность 84 земли, он также отражается от поверхности земли. Первый передатчик 64 включает в себя предпочтительно лазер для создания света.
Второй передатчик 68 излучает электромагнитные вторые волны в микродиапазоне волн или радарном диапазоне волн, в то время как второй приемник 70 чувствителен только к этим волнам. Длина волны выбрана таким образом, что наибольшая часть вторых волн проникает сквозь растения и отражается только от поверхности 84 земли. Определенная, хотя и меньшая доля вторых волн отражается также от растений 82.
Электромагнитные волны, излучаемые передатчиками 64, 68, достигают поверхности 84 земли на расстоянии нескольких метров (например, 10 м) в направлении движения зерноуборочного комбайна 10 перед устройством 18 для уборки урожая. Волны, излучаемые передатчиками 64, 68, могут быть модулированы по амплитуде или иным образом для улучшения отношения сигнал/шум. Посредством измерения времени пробега вычислительное устройство 76 совершает регистрацию расстояния и/или другого параметра измерения между измерительным устройством 62 и точкой, в которой уже были отражены волны. Поворотный привод 74 может быть выполнен в виде серводвигателя или шагового двигателя и непрерывно или пошагово поворачивает измерительное устройство 62 (или только его элементы, излучающие и/или принимающие волны) в угловом диапазоне, равном, например, 30°, вокруг оси 72 туда и обратно. Вычислительное устройство 76 предназначено для того, чтобы для каждого угла поворота измерительного устройства 62 регистрировать соответствующий угол вокруг оси 72 и время пробега волны или, соответственно, расстояние от приемника 66, 70 и передатчика 64, 68 до точки отражения. Затем активируется поворотный привод 74, и измерительное устройство 62 переводится в другое положение. В устройстве 74 аналитической оценки имеется информация о текущем угле измерительного устройства 62, так как оно управляет поворотным приводом 74. Возможно применение отдельного датчика для регистрации угла поворота, при этом серводвигатель или шаговый двигатель может быть заменен любым двигателем. Угол измерительного устройства 62 вокруг оси 72 определяет направление измерения, вдоль которого определяются значения времени пробега волн передатчиков 64, 68 к соответствующему приемнику 66, 70. Оно распространяется горизонтально и в виде дуги окружности поперек прямого направления сельскохозяйственной машины 10.
Сигналы первого приемника 66 содержат информацию о высоте верхних концов растений 82, потому что там они отражаются в первую очередь. Некоторые первые волны проникают, однако, в случае более редких насаждений дальше вниз, частично вплоть до поверхности 84 земли, и только там отражаются и принимаются первым приемником 66. В случае более редких насаждений расстояния, зарегистрированные первым приемником 66, соответственно варьируются сильнее, чем в случае более плотных насаждений. Эти различные вариации расстояний, зависящие от плотности насаждений, оцениваются устройством 74 аналитической оценки и используются для определения плотности насаждения растений. Кроме того, значения измерений второго приемника 70 служат для определения профиля почвы, который в сочетании со значениями высоты верхних сторон растений 82, зарегистрированными первым приемником 66, применяется для более точного определения значений высоты растений, которые используются также для определения количества растений.
Камера 86 направлена с крыши кабины 60 наискосок вниз и вперед на поле 80 с растениями 82, находящимися на поле перед устройством 18 для уборки урожайности. Сигналы камеры 86 также подаются в вычислительное устройство 76.
Кроме того, сельскохозяйственная машина 10 оснащена несколькими датчиками рабочих параметров и датчиками урожайности, каждый из которых непосредственно или опосредствованно регистрирует данные для эксплуатации сельскохозяйственной машины 10 или, соответственно, свойств убираемых растений 82 и передает их сигналы вычислительному устройству 76. Датчик 88 урожайности регистрирует угловое положение установленного с возможностью вращения щупа 90, который взаимодействует с пластом собранного урожая на наклонном транспортере 20. Датчик 88 урожайности регистрирует соответственно толщину слоя растений 82 на наклонном транспортере 20. Датчик 92 рабочих параметров регистрирует приводной момент или, соответственно, приводную мощность молотильного барабана 22, который или которая, в свою очередь, зависит от количества (объема и массы) собранных растений 82. Датчик 94 рабочих параметров регистрирует приводной момент или, соответственно, приводную мощность воздуходувки 96, который или которая зависит от загрузки решет 98. Датчик 100 урожайности включает в себя камеру и спектрометр близкого инфракрасного излучения, которые взаимодействуют с очищенным зерном, транспортируемым зерновым шнеком 48, и, с одной стороны, посредством камеры и обработки изображений определяют чистоту зерна и долю дробленого зерна в очищенном зерне, а с другой стороны, посредством спектрометра близкого инфракрасного излучения определяют влажность зерна и другие компоненты, такие как содержание протеина. В этой связи ссылаемся на описание DE 10 2007 007 040 A1. Наконец, датчик 102 урожайности регистрирует потерянные зерна на выходе верхнего решета 98.
На фиг.2 поясняется принцип действия системы автоматического документирования ситуаций во время полевых работ согласно изобретению. После запуска, осуществляемого на этапе 200, на этапе 202 с помощью вычислительного устройства 76 на основании сигналов приемников 66, 70 оценивается производительность сбора урожая. Более подробно это описывается в DE 10 2008 043 716 A1 и DE 10 2011 085 380 A1 и цитируемых в них ссылках, описания которых путем ссылки включаются в настоящие документы заявки. Кроме того, производительность сбора урожая определяется на основании сигналов датчика 88 урожайности и датчиков 92 и 94 рабочих параметров. Кроме того, с помощью датчика 102 урожайности определяются потери, а с помощью датчика 100 урожайности определяется доля дробленого зерна, а также компоненты (влажность, содержание протеина) зерна. Эти данные вместе с данными положений системы 104 определения положения, опирающейся на спутниковые сигналы, сохраняются в памяти с географической привязкой с целью документирования полевых работ.
На следующем этапе 204 оценивается наличие ситуации, подлежащей фотографическому документированию. Для этого значения производительности, определенные на этапе 202, могут сравниваться с картой урожайности прошлого года. Если отклонение между текущими значениями производительности урожая, измеренными с помощью датчиков 66, 70, 88 урожайности и датчиков 92 и 94 рабочих параметров, и ожидаемыми значениями производительности больше, чем некоторая пороговая величина, то имеет место первая ситуация, подлежащая фотографическому документированию. Аналогично вторая, подлежащая фотографическому документированию ситуация имеет место, когда потери, зарегистрированные с помощью датчика 102 урожайности, больше, чем некоторая заданная пороговая величина, которая, например, может составлять 2% или берется из карты урожайности. Третья ситуация, подлежащая фотографическому документированию, имеет место также, когда доля дробленого зерна больше, чем некоторая заданная пороговая величина, или сигнал влажности зерна больше, чем некоторая заданная пороговая величина, или содержание протеина в зерне меньше, чем некоторая заданная пороговая величина. Кроме того, ситуация, подлежащая фотографическому документированию, также имеет место, когда производительность собранного урожая попадает в заданный класс (малая, средняя, высокая) или превышает прежнее минимальное или максимальное значение на некоторую определенную пороговую величину, равную, например, 10%. В случае если нет ни одной из названных ситуаций, снова осуществляют этап 202.
В противном случае осуществляют этап 206, в котором подается сигнал срабатывания и сигналы изображения (записываемые во временном интервале, начинающемся до сигнала срабатывания и заканчивающемся после сигнала срабатывания) камеры 86 берутся из временной памяти, непрерывно заполняемой и снова очищаемой и сохранятся вместе с сигналами приемников 66, 70, поступающих в указанном временном интервале, и данными согласно этапу 202. Эти данные, включая сигналы изображения камеры 86 и сигналы приемников 66, 70, могут, таким образом, браться из созданной на этапе 202 карты урожайности, чтобы позднее можно было аналитически оценивать их. Альтернативно или дополнительно на этапе 206 упомянутые данные и сигналы посредством передающего устройства 106 передаются в компьютер 100 для аналитической оценки, расположенный в удаленном месте 108.
Сигнал срабатывания может использоваться внутри в вычислительном устройстве 76, или оператору в кабине 60 может передаваться отображение или акустическое указание, чтобы он и сам в рамках своих способностей мог реагировать на ситуацию. Специалист (руководитель производства, агроном, подрядчик и тому подобное) в удаленном месте посредством компьютера 110 для аналитической оценки может анализировать фотографически задокументированные ситуации, возможно требующие реагирования, после поступления с помощью передающего устройства 106 сигнала срабатывания или упомянутых данных и сигналов или же по окончании работ на поле и передачи данных, указанных на фиг.2, беспроводным путем или посредством переносного носителя данных в компьютер 110 для аналитической оценки. Для этого может быть достаточно, чтобы он рассматривал изображения камеры 86 на дисплее компьютера 110 для аналитической оценки, или согласно одному из усовершенствованных вариантов осуществления компьютер 110 для аналитической оценки может выдавать ему рекомендации о последовательности совершений действий. Эти рекомендации могут передаваться оператору машины 10 посредством передающего устройства 106, выполненного также в виде приемника (или посредством любой другой связи, например, мобильной телефонной связи). Устройство 112 ввода позволяет оператору или другому уполномоченному лицу, в частности, после ввода пароля, задавать или изменять критерии подачи сигнала срабатывания. Кроме того, он может посредством устройства 112 ввода задавать или изменять сохраненные в памяти или, соответственно, переданные на этапах 202 и 206 данные или сигналы (например, продолжительность сохраненных в памяти и/или переданных сигналов камеры 86).
Также следует заметить, что и сигналы камеры 86 можно непрерывно контролировать с помощью вычислительного устройства 76. Благодаря этому можно, например, распознавать препятствия перед машиной 10 и использовать для формирования сигнала срабатывания (и для формирования сигнала останова для оператора или устройства 78 для задания скорости). Также из сигналов камеры 86 можно выделять данные о цвете собранного урожая и обрабатывать в качестве параметра собранного урожая на этапах 202, 204 и 206 фиг.2, так чтобы, например, в случае слишком зеленого или лежащего урожая можно было формировать сигнал срабатывания.
Реферат
Группа изобретений относится к сельскому хозяйству и может быть использована при проведении полевых работ. Система автоматического документирования ситуаций во время проведения полевых работ включает по меньшей мере один датчик рабочих параметров сельскохозяйственной машины и/или по меньшей мере один датчик урожайности для регистрации собираемого урожая. С датчиком рабочих параметров и/или с датчиком урожайности соединено вычислительное устройство, которое запрограммировано для генерирования сигнала срабатывания при наступлении заданного условия. Вычислительное устройство соединено с устройством записи изображений для генерирования сигнала изображения сельскохозяйственной машины и/или ее окружения и сохраняет в памяти сигналы изображений в качестве отклика на сигнал срабатывания и/или передает их по линии передачи в удаленное место. Использование группы изобретений позволяет анализировать и при необходимости устранять неблагоприятную ситуацию. 3 н. и 12 з.п. ф-лы, 2 ил.
Формула
по меньшей мере один датчик (92, 94) рабочих параметров для регистрации рабочих параметров сельскохозяйственной машины (10) во время полевых работ и/или по меньшей мере один датчик (66, 70, 88, 100, 102) урожайности для регистрации свойства урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной (10) во время полевых работ, и
вычислительное устройство (76), соединенное с датчиком (92, 94) рабочих параметров и/или датчиком (66, 70, 88, 100, 102) урожайности, которое запрограммировано для того, чтобы при наступлении заданного условия принимаемых сигналов датчика (92, 94) рабочих параметров и/или датчика (66, 70, 88, 100, 102) урожайности генерировать сигнал срабатывания,
отличающаяся тем, что вычислительное устройство (76) соединено с устройством (66, 70, 86) записи изображений для генерирования сигнала изображения сельскохозяйственной машины (10) и/или ее окружения и запрограммировано для того, чтобы сохранять в памяти сигналы изображения в качестве отклика на сигнал срабатывания, с географической привязкой, и/или пересылать их по линии передачи в удаленное место (108).
возникает отклонение принимаемых сигналов датчика (92, 94) рабочих параметров и/или датчика урожайности (66, 70, 88, 100, 102) от ожидаемого номинального значения более чем на некоторую пороговую величину, и/или
возникает отклонение принимаемых сигналов датчика (92, 94) рабочих параметров и/или датчика урожайности (66, 70, 88, 100, 102) от возникавшего прежде максимального или минимального значения более чем на некоторую пороговую величину, и/или
принимаемые сигналы датчика (92, 94) рабочих параметров и/или датчика урожайности (66, 70, 88, 100, 102) попадают в заданный класс.
регистрацию рабочего параметра сельскохозяйственной машины (10) во время полевых работ и/или свойства урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной (10) во время полевых работ, и
генерирование сигнала срабатывания при наступлении заданного условия рабочего параметра и/или свойства собранного урожая,
отличающийся тем, что в качестве отклика на сигнал срабатывания сигналы изображения сельскохозяйственной машины (10) и/или ее окружения сохраняются в памяти и/или передаются по линии передачи в удаленное место (108).
Документы, цитированные в отчёте о поиске
Способ управления системой сельхозмашин и автоматическая система управления
Комментарии