Цифровой компаратор - RU2172011C2
Код документа: RU2172011C2
Чертежи











Описание
Настоящее изобретение относится к цифровому компаратору для сравнения двух комплексных векторных величин в реальном времени и, в частности, к цифровому компаратору, используемому в релейной защите.
Релейная защита обычно подразумевает выполнение одной или нескольких из следующих функций по отношению к защищенным системам питания или подачи энергии: (a) мониторинг системы для установления того - находится ли система в нормальном состоянии или нет; (b) измерения, которые включают измерение некоторых электрических величин; (c) защита, которая обычно включает размыкание выключателя схемы при обнаружении короткого замыкания; и (d) сигнализация, которая обеспечивает предупреждение о некоторых затруднительных обстоятельствах. При выполнении этих и других дополнительных функций, таких как обнаружение сбоев, определение направления потока мощности, обнаружение максимального тока и других, системы релейной защиты должны сравнивать две комплексные векторные величины (напряжения и токи). Обычно, чем быстрее такое сравнение может быть выполнено, тем лучше.
До настоящего изобретения защитные реле сравнивали комплексные векторные величины с использованием методов частотной области, например такого, как метод Фурье-преобразования. Известен способ анализа векторных величин по европейскому патенту N 447575, опубл. 25.09.91, кл. G 06 F 15/347, согласно которому получают отсчеты, представляющие значения первой и второй векторных величин в первый и второй моменты времени, перемножают их и производят суммирование произведений.
Известен также цифровой компаратор по патенту США N 3500322, опубл. 15.05.67, кл. G 06 F 7/02, содержащий средства дискретизации для получения отсчетов в первый и второй моменты времени, средства для перемножения и суммирующее средство для сложения произведений с соответствующими связями между ними.
Известен и способ определения разности фаз, описанный в анализаторе электрических параметров в системе питания по патенту США N 5151866, опубл. 29.09.92, кл. G 06 F 15/20, основанный на получении множества отсчетов двух сигналов и вычислении разности фаз.
Главной целью настоящего изобретения является разработка способов и устройства для сравнения комплексных векторных величин в реальном времени.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение использует цифровые методы, основанные на
свойствах цилиндрического устройства
(рассмотренного ниже), для сравнения комплексных векторных величин в реальном времени. Нестационарные процедуры, приведенные в этом описании, сравнивают
комплексные векторные величины быстрее, чем
любой ранее известный способ.
В соответствии с данным изобретением способ реального времени и устройство для сравнения двух комплексных векторных величин, представленных сигналами, обозначаемыми в дальнейшем как "S1", "S2", включают следующие операции и средства для получения отсчета (S1k) мгновенного значения первой комплексной векторной величины в первый момент времени и получения отсчета (S2k) мгновенного значения второй комплексной векторной величины в первый момент времени; а после этого получения отсчета (S1k+1) мгновенного значения первой комплексной векторной величины во второй момент времени и получения отсчета (S2k+1) мгновенного значения второй комплексной векторной величины во второй момент времени; и затем получения производных величин B1k, B2k, B1k+1 и B2k+1 из S1k, S1k+1, S2k+1; и далее умножения B1k на B2k+1 и умножения B2k на B1k+1 для получения первого произведения B1kB2k+1 и второго произведения B2kB1k+1; и затем суммирования первого и второго произведений для получения суммы; и наконец, масштабирования суммы для получения результата вычислений (Mk+1), соответствующего разности фаз, при наличии таковой, между первой и второй комплексными векторными величинами. Операция масштабирования предпочтительно включает умножение суммы на заданный множитель, пропорциональный периоду дискретизации.
Сигналы B1 и B2 получаются от входов цифрового компаратора, приведенного ниже. Эти входные сигналы обозначаются как "S1" и "S2". Соотношение
между S1 и B1 включает значения отсчетов S1k и
S1k-1. Соотношение между S2 и B2 включает значения отсчетов S2k и S2k-1. В варианте выполнения данного
изобретения, приведенном ниже, эти соотношения имеют вид:


B1k = FK2[S1k + S1k-1 - FK1 B1k-1],
B2k = FK2[S2k + S2k-1 - FK1 B2k-1],
где "RB" и "LB" представляют собой набор констант, обеспечивающих повышение эффективности устройства. То же самое относится и к S2 и B2, т.е. FK1 и FK2 находятся по тем же соотношениям с S2k и S2k-1, как и для S1.
В предпочтительных вариантах выполнения данного изобретения S1k, и S2k получают дискретизацией сигналов передающей линии, a S1(t) и S2(t) представляют собой напряжения, токи или комбинации токов и напряжений, которые изменяются по синусоидальному закону.
В одном предпочтительном применении данного изобретения результат вычислений Mk+1 используется для обнаружения наличия сбоя в передающей линии. Например, результат вычислений может быть использован для обнаружения межфазного сбоя в трехфазной линии передач. В этом случае S1(t) и S2(t) предпочтительно получаются из межфазных напряжений и комплексных токов.
В другом предпочтительном применении результат вычислений используется для определения сбоя фаза-земля в системе трехфазной линии передач. В этом варианте выполнения данного изобретения S1(t) и S2(t) предпочтительно получаются из напряжений фаза-земля и комплексных токов.
Другое предпочтительное применение данного изобретения включает использование результата вычислений Мk+1 для определения направления потока мощности в передающей линии. Передающая линия может представлять собой набор трех проводников, идущих от точки "A" к точке "B". Если устройство для определения направления располагается у точки A, то направление потока мощности (от A к B или от B к A) должно определяться направленным устройством. Обычно используются два типа направленных устройств - фазовые и заземленные. Несколько типов направленных устройств приведены ниже. В фазовом направленном устройстве используются межфазные напряжения и комплексные токи. Заземленными направленными устройствами являются заземленное направленное устройство со смещением нулевой последовательностью, заземленное направленное устройство со смещением отрицательной последовательностью и заземленное направленное устройство с токовым смещением. Во всех этих устройствах положение входных комплексных векторных величин S1 и S2 является фазоподобным по отношению друг к другу и определяет "прямое" или "обратное" направление потока мощности.
В другом применении данного изобретения сигналы напряжения и/или тока дискретизируются, и результат вычислений Mk+1 используется для того, чтобы определить превосходят или нет напряжение или ток в передающей линии заданный пороговый уровень.
В дополнение, заданная константа (МС) может быть вычтена из результата вычислений Мk+1, и разность Мk+1, - МС может быть использована для получения сигнала (θk+1), соответствующего энергии, содержащейся в сигналах S1(t) и S2(t). Необходимо отметить, что данное изобретение обеспечивает релейной защите средство сравнения фазового соотношения S1 и S2, а также энергетического содержания двух суммарных сигналов. Ни один другой известный цифровой метод, используемый в промышленных исследованиях, не обладает способностью изменять свою работу в зависимости от энергетического содержания входных сигналов S1 и S2. Эта характеристика необходима в применениях релейной защиты, в которых рабочий интервал обратно пропорционален энергетическому содержанию. Другие методы, как например метод фурье-фильтрации, широко используемый в промышленных исследованиях, не обеспечивают такую обратную зависимость. Скорость обработки совершенно не зависит от энергетического содержания входных сигналов.
Таким образом, входные сигналы S1 и S2 цифрового компаратора определяют характеристики создаваемого устройства. Многочисленные применения цифрового компаратора, приведенные ниже, включают релейную защиту, обсуждавшуюся выше, и другие.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематически показывает входы системы электропитания для применения релейной защиты и/или применения цифрового
компаратора.
Фиг. 2A схематически показывает цилиндрическое устройство с входными сигналами S1 и S2.
Фиг. 2B показывает ожидаемые зависимости вращательного момента от угла между фазами (между S1 и S2) цилиндрического устройства.
Фиг. 3A представляет собой блок-диаграмму цифрового компаратора в соответствии с данным изобретением. В этом варианте данного изобретения вычисляется Mk+1 в реальном времени, причем Mk+1 соответствует вращательному моменту цилиндрического устройства.
Фиг. 3B показывает комплексные векторные характеристики цифрового компаратора, приведенного на фиг. 3A. Фиг. 3B показывает комплексные векторные характеристики цилиндрического устройства, приведенного на фиг. 2A, которые аналогичны комплексным векторным характеристикам цифрового компаратора и его выходному сигналу М.
Фиг. 4A показывает схему, которая моделирует уравнения, определяющие входные сигналы межфазного устройства определения дальности на базе цифрового компаратора в соответствии с данным изобретением.
Фиг. 4B представляет собой блок-диаграмму одного из вариантов межфазного устройства определения дальности с оператором задержки "d".
Фиг. 4C показывает схему, которая моделирует уравнения, определяющие входные сигналы устройства определения дальности по величинам фаза-земля на базе цифрового компаратора в соответствии с данным изобретением.
Фиг. 4D представляет собой блок-диаграмму одного из вариантов устройства определения дальности по величинам фаза-земля в соответствии с данным изобретением.
Фиг. 5A показывает требуемую характеристику направленного устройства в R-X плоскости. Направленные устройства, приведенные в этом описании, обладают этой характеристикой.
Фиг. 5B иллюстрирует идеализированное цилиндрическое устройство и соотношение между М (вращательным моментом) и θ (углом).
Фиг. 5C - 5F показывают обработку, выполняемую направленными устройствами с цифровым компаратором в соответствии с данным изобретением.
Фиг. 6A показывает компоненты аналогового симметричного фильтра.
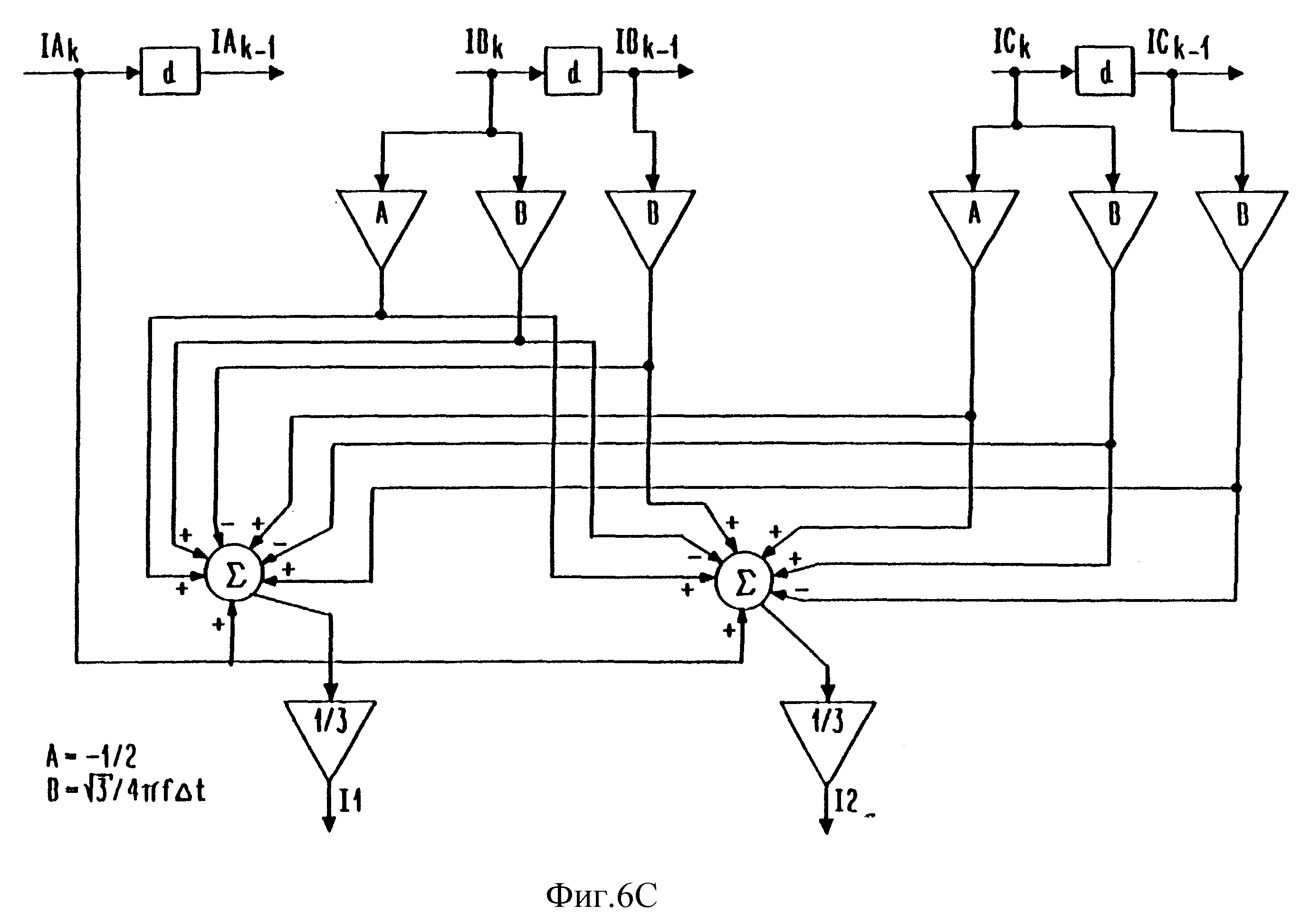
Фиг. 6B и 6C схематически показывают варианты фильтров с симметричными компонентами в соответствии с данным изобретением. Фиг. 6B показывает фильтр с симметричными компонентами Кларка. Фиг. 6C показывает фильтр с симметричными компонентами и прямым фазовым сдвигом.
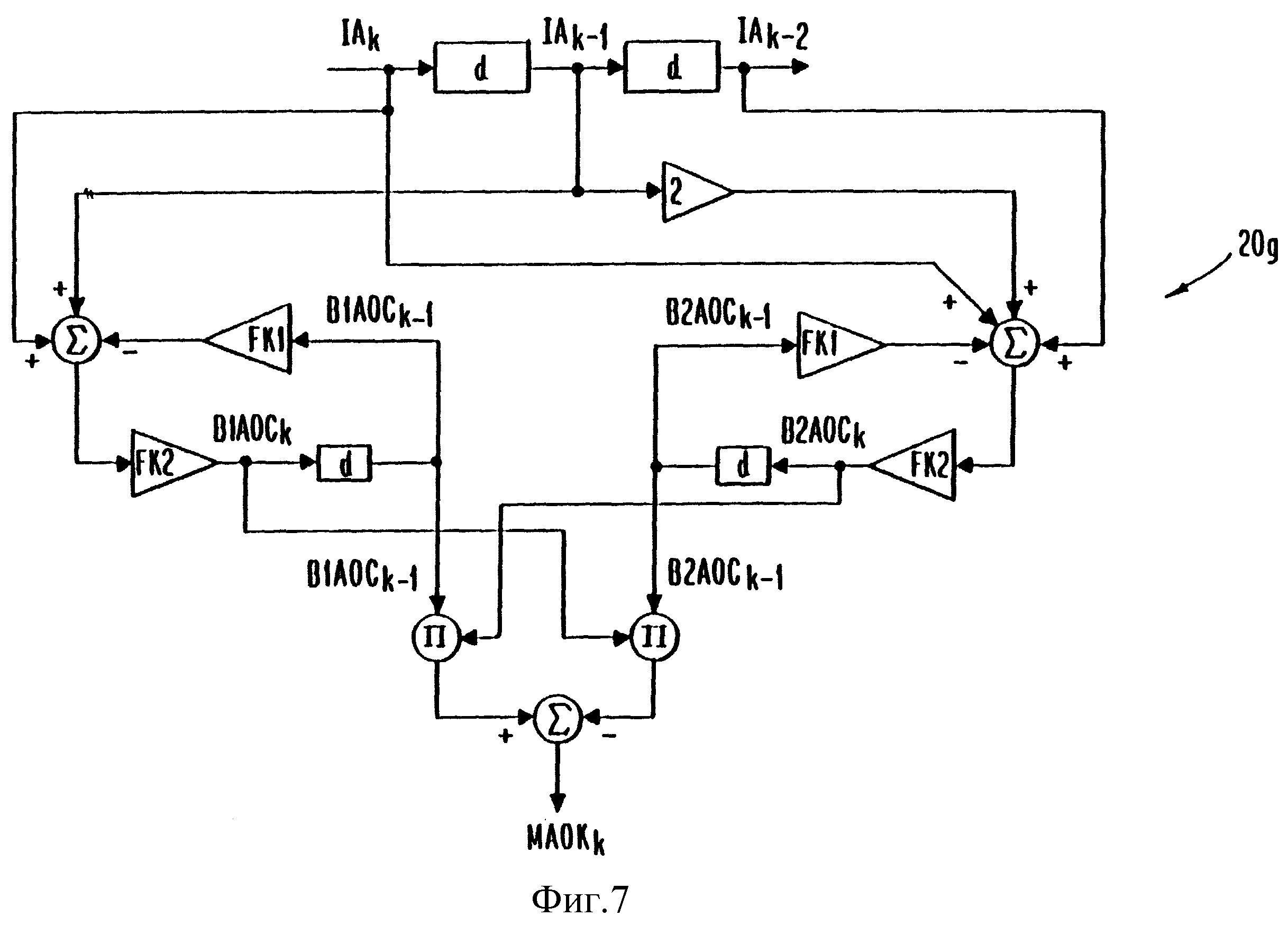
Фиг. 7 схематически показывает один вариант устройства максимального тока (на вход которого можно подавать как сигналы напряжения, так и сигналы тока) и его реализацию с помощью разделительного компаратора в соответствии с данным изобретением. (Отметим, что многие устройства на базе цифрового компаратора используют разделительный компаратор, который является принимающим решение процессором).
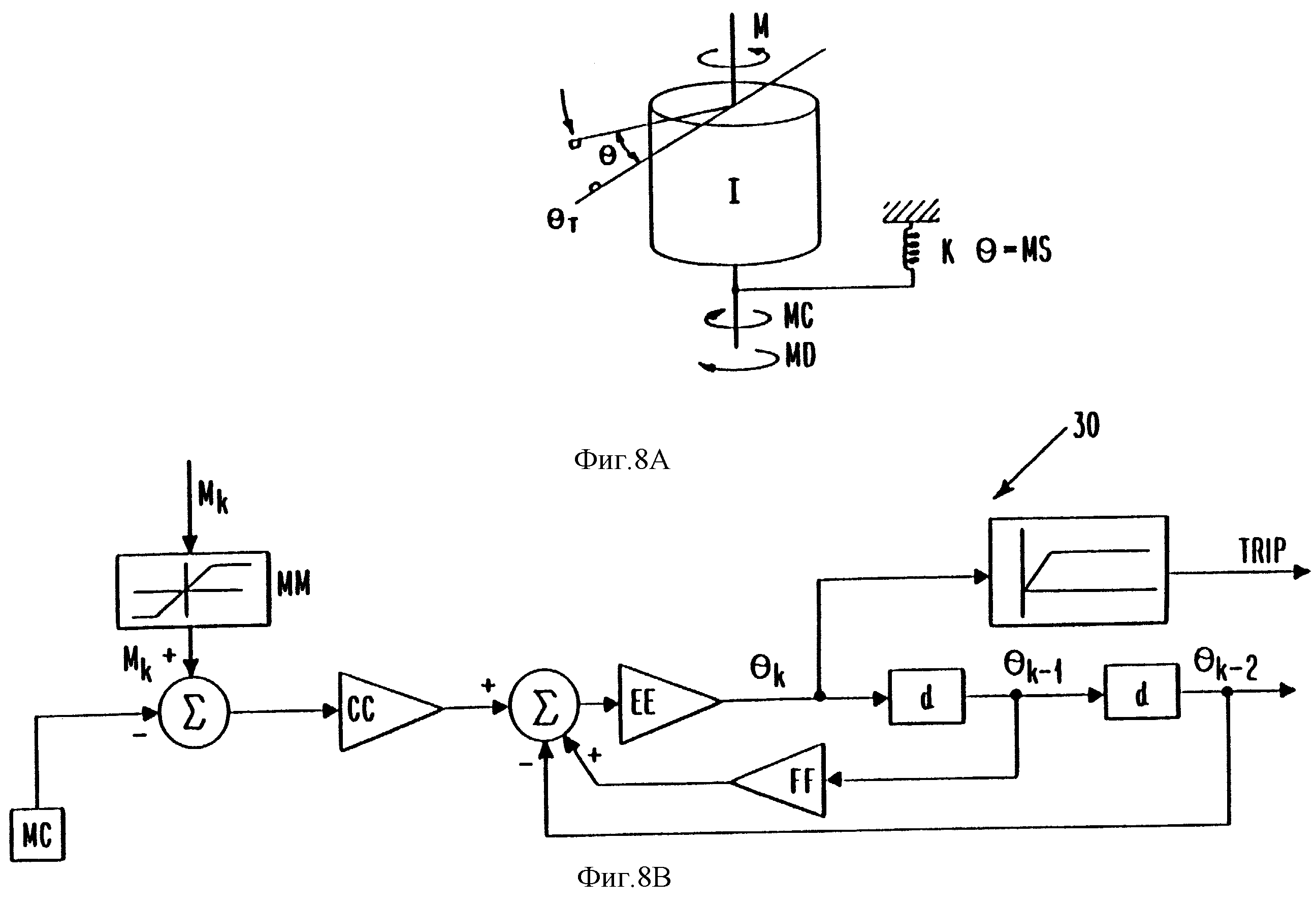
Фиг. 8A показывает механическую систему, аналогичную разделительному компаратору.
Фиг. 8B схематически показывает один вариант цифрового разделительного компаратора в соответствии с данным изобретением.
Фиг. 9 схематически показывает функциональную характеристику разделительного компаратора.
Фиг. 10 представляет собой иллюстративный график выходного сигнала разделительного компаратора.
ДЕТАЛЬНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
ДАННОГО ИЗОБРЕТЕНИЯ
А. КРАТКИЙ ОБЗОР
Релейная защита представляет собой способ защиты
электрического оборудования, получающего напряжение или ток от системы электропитания. Система
релейной защиты требует определенных входных сигналов от передающей линии 10, которая состоит из трех
фазовых проводов A, B, C. Фиг. 1 показывает стандартный способ получения требуемых входных
сигналов. Видно, что входные сигналы напряжения VA, VB, VC получаются с помощью трансформатора напряжений 12,
а входные сигналы тока IA, IB, IC получаются с помощью трансформатора тока 14. Величины
для устройства релейной защиты 16 представляют собой комплексные напряжения VA, VB, VC; напряжение нулевой
последовательности - 3V0 = VA+VB+VC; комплексные токи IA, IB, IC; и ток нулевой
последовательности - 3I0 = IA+IB+IC.
В. ФАЗОВЫЙ КОМПАРАТОР РЕАЛЬНОГО ВРЕМЕНИ, МОДЕЛИРУЕМЫЙ
ЦИЛИНДРИЧЕСКИМ УСТРОЙСТВОМ
Компаратор представляет собой устройство, используемое в
защитных реле, для сравнения двух комплексных векторных величин по фазе и/или по величине. Цилиндрическое
устройство 18, схематически представленное на фиг. 2A, представляет собой хорошо известный тип
компаратора, применяемый в электромеханических реле. Двумя отличительными характеристиками этого
цилиндрического устройства являются его нечувствительность к смещению по постоянному току и высокое
быстродействие.
Когда два сигнала напряжения S1 и S2 подаются на цилиндрическое
устройство 18, то возникают плотности потоков B1 и B2. Эти плотности потоков характеризуются векторным
распределением по поверхности вращающегося цилиндра. Если B1 и B2 не стационарны, то в цилиндре
возбуждаются токи, и эти токи пропорциональны скорости изменения B1 и B2, представленных величинами
dB1/dt и (dB2/dt, и углу тета (θ), который представляет собой разность фаз между сигналами
S1 и S2. Эти токи цилиндра направлены вдоль положительного направления оси Z (т.е. перпендикулярно
плоскости фиг. 1). Используя уравнение векторных сил (см. ниже), может быть найдено поле векторных
сил на поверхности цилиндра:

Интересующей величиной является момент вращения относительно оси Z. Этот момент вращения может быть вычислен суммированием компонент момента вращения.

Момент вращения следующим образом выражается через плотности потоков B1 и B2:

где σ - удельная электрическая проводимость (См/м),
π = 3,1415,
r - радиус цилиндра,
l - длина цилиндра,
Т - толщина цилиндра.
Если два зависящих от времени сигнала напряжения S1(t) и S2(t) подаются на цилиндрическое устройство 18,
то возбуждается изменяющаяся во времени плотность потока B(t). Эта плотность потока
B(t) имеет компоненты B1(t) и B2(t), связанные с S1(t) и S2(t) следующими соотношениями:




где N1 и N2 число витков входных обмоток подачи сигналов S1 и S2.
Необходимо отметить, что эти уравнения не содержат никакого механизма потерь. Следующие соотношения включают потери и могут быть использованы для определения S (входных сигналов) через величины В.

где LB и RB константы, определяемые так, чтобы сделать модель более эффективной.
Если
сигналы S1(t) и S2(t) представляют собой синусоидальные волны так, что:
S1(t) = Sin(ωt),
S2(t) = Sin(ωt),
то, вращающий момент (выраженный в долях единицы)
будет равен:
M = 0, когда δ = 0o,
M = -1, когда δ = 90o,
M = 0, когда δ = 180o,
M = 1, когда δ =
270o,
как показано на фиг. 2B.
При применении вышеприведенных уравнений
к защитным реле на базе микропроцессоров и/или микроконтроллеров они могут быть
преобразованы в дискретную форму с использованием трапецеидального правила:


B1k = FK2[S1k + S1k-1 - FK1 B1k-1],
B2k = FK2[S2k + S2k-1 - FK1 B2k-1],
в которых:

и вращающий момент может быть выражен в следующем виде:
Мk = B2k, B1k-1 - B1k, B2k-1,
где k+1 - текущий отсчет,
k - предыдущий отсчет,
Δ t - период дискретизации.
Фиг. 3A представляет собой блок-диаграмму схемы цифрового компаратора или системы 20 для вычисления Мk. В этой системе на фиг. 3A "d" обозначает устройство задержки; "Σ" означает суммирующее устройство; "П" обозначает умножитель, и "FK1" и "FK2" обозначают усилители. Выходной сигнал Mk системы 20 представляет собой вращающий момент Mk в реальном времени компаратора, имеющего комплексные векторные характеристики, приведенные на фиг. 3B и иллюстрирующие рабочие характеристики цифрового компаратора 20. Принимая сигнал S1 за опорный уровень, разность фаз от 0 до -180o соответствует рабочему диапазону устройства. Разность фаз от 0o до +180o соответствует нерабочему или ограничительному диапазону устройства.
Эта процедура может быть использована в реле дальности, контрольных реле, направленных реле, реле максимального тока, реле максимального или минимального напряжения и т. д. , в которых желательно сравнение в реальном времени двух комплексных векторных величин. В специальных применениях данного изобретения механические влияния, такие как сила ограничивающей пружины, сила трения и/или сила смещения могут быть при необходимости учтены в модели.
С. УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДЛЯ ОБНАРУЖЕНИЯ СБОЕВ
Процедура
реализации устройства определения дальности с
использованием цифрового компаратора приведена ниже.
Релейная защита связана с обнаружением сбоев в устройствах электропитания. В релейной защите передающей линии используется реле дальности для обнаружения нескольких типов сбоев линии передачи. Эти устройства обнаруживают сбои в передающих линиях до определенной протяженности или дальности. В общем случае эти приборы измеряют импеданс, который пропорционален расстоянию от местоположения реле до места сбоя (отсюда название "устройство определения дальности"). Цифровые устройства определения дальности в соответствии с этой процедурой обнаруживают сбои быстрее известных детекторов сбоев, а во всех других отношениях имеют характеристики, аналогичные электромеханическим устройствам определения дальности. Цифровые способы, изложенные ниже, менее подвержены переходным процессам и шумам, чем другие способы временной области. Это объясняется сходством с цилиндрическим устройством, которое имеет хорошие рабочие характеристики при наличии переходных процессов.
1. МЕЖФАЗНОЕ УСТРОЙСТВО
При обнаружении межфазных сбоев входные
сигналы цифрового компаратора имеют вид:
S1 = VA
- VB - (IA - IB),
S2 = VC - VB - (IC - IB).
Схема, приведенная на фиг. 4A, моделирует эти уравнения. Поэтому S1(t) и
S2(t) могут быть получены из межфазных напряжений и токов
следующим образом:


Если преобразовать эти уравнения в дискретную форму и применить их к модели цилиндрического
устройства, обсуждавшейся выше, то получим:


которые являются входными сигналами цифрового компаратора (называемого также "генератором вращательного момента"), выведенными ранее. S1k и S2k используются затем для получения B1k и B2k, как указано выше.
Вышеприведенные уравнения представляют собой дискретные реализации межфазового устройства определения дальности, которое обнаруживает все типы сбоев по двум фазам, а также некоторые сбои фаза-фаза-земля.
Фиг. 4B представляет блок-схему одной из
реализаций вышеприведенных уравнений в случае межфазового устройства
определения дальности. Отметим, что дельта- токи Iab и Icb дискретизируются, задерживаются и комбинируются с задержанными отсчетами
дельта-напряжений Vab и Vcb. Каждая комбинация является входным
сигналом цифрового компаратора 20a, который подобен цифровому компаратору 20, приведенному выше. Выходной сигнал цифрового компаратора
подается на ограничительное устройство, обозначенное через "ММ"
и входящее в состав разделительного компаратора 30 (см. описание ниже). Уравнения для B1 и B2 решаются и перекрестные произведения
B1k на B2k+1 и B1k+1 на B2k используются для получения члена Mk. Усилители обозначены через "AOO", "BOO", "CC", "EE", "FF", "FK1", "FK2" в
соответствии с их коэффициентами усиления, приведенными в следующем
списке:
A00 = Rc+Lc/Δt,
B00 = Lc/Δt,
CC = Δt2/I,
EE =
I/(I+Δt2KC/I+ΔtKD/I),
FF = 2+ΔtKD/I,
FK1 = (2LB-ΔtRB)/Δt,
FK2 = Δt/(ΔRB+2LB).
(Отметим, что CC, EE и FF
относятся к разделительному компаратору).
2. УСТРОЙСТВО,
ИСПОЛЬЗУЮЩЕЕ ВЕЛИЧИНЫ ФАЗА-ЗЕМЛЯ
Входные сигналы хорошо известного устройства для обнаружения сбоев фаза-земля имеют
вид:
S1 = VA-(IA- K0I0)Zc,
S2 = VC-VB,
где

Zc = Rc+jXc = Rc+j2πfLc,

На фиг. 4C представлена упрощенная схема, моделирующая вышеприведенные уравнения.
Если эти уравнения преобразовать в дискретную форму и применить к
уравнениям цифрового компаратора, то получим:

S2k = Vck - Vbk ,
которые являются входными сигналами цифрового компаратора, выведенными выше.
Фиг. 4D
представляет собой блок-диаграмму одного варианта устройства, использующего величины
фаза-земля, в соответствии с данным изобретением. Показанные токи и напряжения дискретизируются и комбинируются в
сумматорах, как показано, и затем подаются на входы цифрового компаратора 20b. Члены
B1 и B2 затем перекрестно перемножаются, получается величина Мk, и она подается на разделительный
компаратор 30 (см. описание ниже). Усилители обозначены через "A01", " B01", "C01", "E01",
"СС", "ЕЕ", "FF" в соответствии с их коэффициентами усиления, приведенными в следующем списке:
A01 =
Rc+Lc/Δt,
B01 = Lc/Δt,
C01 =
(KrRc-KlXc)/3+(KrXc+KlRC)/3ωΔt,
E01 = (KrXc+KlRC)/3ωΔt,
CC = l/(l+Δt2
KC/l+ΔtKD/l),
EE = Δt2/l,
FF = 2+ΔtKD/l.
Таким образом, приведена общая процедура реализации устройства измерения импеданса (устройства
определения дальности). Данные устройства обладают высоким
быстродействием, т. к. требуются только три периода дискретизации (k-1, k, k+1) для получения критерия разделения независимо от частоты
дискретизации. Более того, другие устройства определения
дальности могут быть реализованы в соответствии с изложенной здесь процедурой. Рассмотренные выше устройства определения дальности - межфазовое
устройство определения дальности и заземленное
устройство определения дальности (называемое также заземленным устройством определения дальности с квадратурным смещением), являются всего лишь двумя
примерами различных принципов, используемых в
релейной защите для создания устройства определения дальности. Вышеописанная процедура позволяет получить любой тип устройства определения дальности,
используемый в настоящее время в промышленных
исследованиях, для сравнения двух комплексных векторных величин.
D. НАПРАВЛЕННОЕ УСТРОЙСТВО
Направленные устройства являются
приборами, используемыми в релейной защите для
определения направления потока мощности. Заземленные направленные устройства на базе цифрового компаратора, приведенного выше, являются
быстродействующими, что делает их идеальными устройствами для
применения в релейной защите и для совместной работы с устройствами определения дальности на базе цифрового компаратора.
Фиг. 5A иллюстрирует характеристики таких направленных устройств в R-X плоскости. В данном примере прямое направление соответствует потоку мощности в передающую линию. Обратное направление соответствует потоку мощности из передающей линии.
Направленные устройства разделяются на две категории: фазовые направленные устройства и заземленные направленные устройства. Фазовые
направленные устройства работают в любых условиях. Заземленные
направленные устройства работают только тогда, когда система электропитания не уравновешена. Разработаны следующие направленные
устройства:
1. НАПРАВЛЕННОЕ УСТРОЙСТВО СО СМЕЩЕНИЕМ
ОТРИЦАТЕЛЬНОЙ ПОСЛЕДОВАТЕЛЬНОСТЬЮ
Используя выходные сигналы цифрового фильтра с симметричными компонентами, следующие уравнения
могут быть использованы для реализации направленного
устройства со смещением отрицательной последовательностью:
B1k = FK2(V2k + 2V2k-1 + V2k-2
- FKl B1k-1),
B2k =
FK2(I2k + 2I2k-1 + I2k-2 - FK1 B2k-1),
Мk = B2k B1k-1 - B1k B2k-1.
В приведенных уравнениях V2 и I2 являются выходными сигналами цифрового фильтра с симметричными компонентами. Этот пример рассмотрен ниже.
2.
НАПРАВЛЕННОЕ УСТРОЙСТВО СО СМЕЩЕНИЕМ
НУЛЕВОЙ ПОСЛЕДОВАТЕЛЬНОСТЬЮ
Следующие уравнения могут быть использованы для реализации направленного устройства со смещением нулевой
последовательностью:
B1k = FK2
(3V0k + 2•3V0k-1 + 3V0k-2 - FK1 B1k-1),
B2k = FK2 (AA 3I0k + AB
3I0k-1 + BB 3I0k-2 - FK1 B2k-1),
Mk = B2kB1k-1 - B1kB2k-1,
где


AB = AA + BB.
В приведенных уравнениях 3V0 = VA+VB+VC и 3I0 = IA+IB+IC.
3. ЗАЗЕМЛЕННОЕ НАПРАВЛЕННОЕ УСТРОЙСТВО С ТОКОВЫМ СМЕЩЕНИЕМ
Если Ipol(t) является входным
сигналом от точки заземления системы электропитания, то
заземленное направленное устройство может быть создано для реализации следующих уравнений:

B2k = FK2 (Ipolk + 2Ipolk-1 + Ipolk-2 - FK1B2k-1),
Mk = B1k-1B2k - B2k-1B1k.
4. ФАЗОВОЕ НАПРАВЛЕННОЕ УСТРОЙСТВО
Фазовое направленное устройство может быть создано для реализации следующих
уравнений:
B1k = FK2 (-VCBk - 2
VCBk-1 - VCBk-2 - FK1B1k-1),
B2k = FK2 (AA IAk + AB IAk-1 + BB
IAk-2 - FK1 B2k-1),
Mk = B1k-1 B2k - B2k-1 B1k,
где

AB=AA+BB,
VCB - дельта-напряжение (VC - VB).
Другие направленные устройства могут быть реализованы на базе цифрового компаратора, приведенного выше. Ранее приведенные уравнения определяют "вращательный момент" данного устройства, которое может быть объединено с цифровым разделительным компаратором.
Фиг. 5C - 5F показывают обработку, выполняемую в направленных устройствах.
Фиг. 5C
иллюстрирует поток данных в заземленном направленном
устройстве со смещением отрицательной последовательностью, которое включает цифровой компаратор 20c и разделительный компаратор 30. Входные сигналы
V2 и I2 цифрового компаратора 20c снимаются с
фильтра с симметричными компонентами. Решение уравнений заземленного направленного устройства со смещением отрицательной последовательностью включает
объединение отсчетов V2 и I2 для образования
членов B1 и B2 и затем перекрестного перемножения для получения члена Мk, который подается на разделительный компаратор 30. Усилители,
обозначенные через "CC", "EE", "FF", "FK1" и "FK2",
имеют следующие коэффициенты усиления:
CC = l/(l+Δt2KC/l+ΔtKD/l),
EE = Δt2/l,
FF = 2+ΔtKD/l,
FK1 = (2LB-Δ
tRB)/Δt,
FK2 = Δt/(ΔtRB+2LB).
Фиг. 5D иллюстрирует поток данных в заземленном направленном устройстве со
смещением нулевой последовательностью. Члены 3V0 и 3I0
получаются из реальных отсчетов величин системы электропитания (3V0 = VA+VB+VC и 3I0= IA+IB+IC). Решение уравнений заземленного направленного
устройства со смещением нулевой последовательностью
включает объединение отсчетов 3V0 и 3I0 для образования членов B1 и B2, которые являются входными сигналами цифрового компаратора 20d, и
перекрестного перемножения для получения члена Мk,
который подается на разделительный компаратор 30. Усилители, обозначенные через "AA55", "BB55" и "AB55", имеют следующие коэффициенты
усиления:
AA55 = √3/4-1/(4πfΔt),
BB55 = √3/4-1/(4πfΔt),
AB55 = AA55 + BB55.
Фиг. 5E иллюстрирует поток данных в заземленном направленном устройстве с токовым смещением, которое включает цифровой компаратор 20e и разделительный компаратор 30. Входной сигнал 3I0 цифрового компаратора получается из реальных отсчетов величин системы электропитания (3I0 = IA+IB+IC) и отсчетов Ipol, являющихся реальными отсчетами тока, полученными от соответствующей точки заземления системы электропитания. Решение уравнений заземленного направленного устройства с токовым смещением включает объединение отсчетов 3I0 и Ipol для образования членов B1 и B2 и перекрестного перемножения для получения члена Мk, который подается на разделительный компаратор.
Фиг. 5F иллюстрирует поток данных в фазовом направленном устройстве (фаза А), которое включает цифровой
компаратор 20f и разделительный компаратор 30. Входной сигнал VCB
цифрового компаратора равен VC - VB, где VC и VB представляют собой реальные отсчеты напряжения фаз С и В. IA является комплексным
током фазы А. Решение уравнений фазового направленного устройства
включает объединение отсчетов VCB и IA для образования членов B1 и B2 и перекрестного перемножения для получения члена Мk,
который подается на разделительный компаратор. Усилители,
обозначенные через "AA52", "BB52" и "AB52", имеют следующие коэффициенты усиления:
AA52 = 1/4+√3/(4πfΔt),
BB52 = 1/4+√3/(4πfΔt),
AB52 = AA52 + BB52.
Вышеописанные процедуры представляют собой типичные процедуры для направленных устройств. Специалисты в данной области понимают, что и другие направленные устройства могут быть реализованы на базе предложенного изобретения.
Е. ФИЛЬТР СИММЕТРИЧНЫХ КОМПОНЕНТ
Величины симметричных
компонент требуются для быстрой и надежной
релейной защиты различных частей системы электропитания. Процедуры, приводимые ниже, обеспечивают симметричные компоненты в нестационарной форме. Эти
процедуры используются в быстродействующих
направленных устройствах и/или устройствах определения дальности. Три такие процедуры приведены ниже.
1. МОДЕЛИРОВАНИЕ СУЩЕСТВУЮЩЕГО
АНАЛОГОВОГО ФИЛЬТРА
Фиг. 6A показывает
аналоговый фильтр. Компоненты положительной и отрицательной последовательностей в дискретной форме задаются следующими уравнениями:
где

где

Константы C1, R1, C2 и R2 могут быть тщательно подобраны для получения следующих оптимизированных уравнений. Существует набор констант R1, C1, R2, и C2, обеспечивающих минимальную ошибку и правильный фазовый сдвиг.
2. ПРЯМОЙ ФАЗОВЫЙ СДВИГ
Уравнения симметричных компонент имеют вид:


Эти уравнения могут быть реализованы с помощью
фазосдвигающих тождеств:


Поэтому в дискретной форме получаем:


3. ВЫВОД КОМПОНЕНТ КЛАРКА
По определению компоненты Кларка равны:
Iα = 3I1+3I2 = 2Ia-Ib-Ic,

Отсюда следует, что:
Используя оператор

получаем:
Преобразуя уравнения в дискретную форму, имеем:

B = √3/(4π fΔt).
F. УСТРОЙСТВО МАКСИМАЛЬНОГО ТОКА
Устройство максимального тока, приведенное ниже, использует цифровой алгоритм, который является быстродействующим и не ухудшается
при смещениях
постоянным током. Оно может быть использовано в качестве детектора уровня для напряжения или тока.
Для реализации одновходного устройства максимального тока один из входных сигналов цифрового компаратора должен быть смещенным по фазе. Используя этот критерий, следующие уравнения могут быть применены для реализации устройства максимального тока, не подверженного эффектам смещения постоянным током. Это устройство является сверхбыстродействующим.
B1K = FK2 (IAk + IAk-1 - FK1 B1k-1),
B2k = FK2
(IAk + 2IAk-1 + IAk-2 - FK1B2k-1),
Mk = B1k-1 B2k - B2k-1 B1k.
Этот выходной сигнал "вращательного момента" (Мk) может быть подан на цифровой разделительный компаратор, и противоположная константа вращательного момента может быть использована для регулировки уровня разделения. В приведенных выше уравнениях IA может быть током, напряжением или любой другой величиной системы электропитания (такой, как например, симметричная компонента).
Фиг. 7 схематически показывает вариант устройства максимального тока 20g и его реализацию в соответствии с данным изобретением. Входные сигналы цифрового компаратора в этом варианте
получаются, как показано, из единственной величины IA. Отсчеты комбинируются для получения величин B1 и B2 в соответствии с вышеприведенными уравнениями. Выходной сигнал Mk может
подаваться
на цифровой разделительный компаратор 30, описанный ниже. Усилители "FK1" и "FK2" имеют следующие коэффициенты усиления:
FK1 = (2LB-ΔtRB)/Δt,
FK2 = Δ
t/(Δ
tRB+2LB),
RB = 1,0,
LB = 0,001.
G. РАЗДЕЛИТЕЛЬНЫЙ КОМПАРАТОР
Процедура, приводимая ниже, может быть использована для реализации цифрового
устройства
разделительного компаратора с задержкой. Цифровой разделительный компаратор входит в состав всех вариантов выполнения изобретения, приведенных выше. Разделительный компаратор ответственен
за принятие
решений о разделении. Другими словами, он решает, когда осуществлять индикацию работы устройства, к которому он подсоединен.
Цифровая модель перемещения контакта электромеханического цилиндрического устройства должна имитировать электромеханические характеристики цилиндрического устройства. Цифровой компаратор, приведенный на фиг. 3A, был использован для разработки цифрового разделительного компаратора (см. описание ниже).
На фиг. 8A:
θ - угол вращения,
θт - угол разделения,
М
- электромеханический
вращательный момент,
MS - противоположный пружинный (силовой) вращательный момент,
МС - постоянный противоположный вращательный момент,
l - момент
инерции цилиндра.
Электромеханическое уравнение для этой модели имеет вид:
Преобразуя
уравнение в дискретную форму для θk получаем:

где



В случае цифрового разделительного компаратора накладываются следующие условия:
Если
(Mk - МС)
< 0, то следующее θk/ равно нулю.
Если θk>θт, то следующее θk приравнивается к θт и используется разделение.
Фиг. 8B схематически показывает один вариант цифрового разделительного компаратора 30 в соответствии с данным изобретением. Входным сигналом разделительного компаратора служит вращательный момент Mk (генерируемый любым из вышеописанных устройств) и, как показано на фиг. 8B, ограниченный двойным неравенством - ММ < Мk < + MM, а затем противоположный вращательный момент смещения МС вычитается из Mk. Остальные схемы реализуют вышеприведенные уравнения. Выходной сигнал θk затем сравнивается с θт для разделения, как отмечено в условии 2. Коэффициенты усиления усилителей "CC", "EE" и "FF" определены выше.
Фиг. 9 и 10 иллюстрируют работу разделительного компаратора. Это устройство формирует сигнал логического "0" (ложно), если устройство в нерабочем состоянии, и формирует сигнал логической "1" (истинно), если устройство в рабочем состоянии. Переменная "0" представляет собой входной сигнал для блока и сравнивается с верхним и нижним пределами. Необходимо отметить, что фиг. 10, показывает типичные пределы, однако могут быть выбраны другие предельные значения.
Если мгновенное значение переменной "0" больше чем 0,6, то в этом случае формируется сигнал логической "1" (истинно) для логических схем релейной защиты в устройстве с микропроцессорным управлением. Если это значение меньше чем 0,6, то логический "0" (ложно) формируется для логических схем релейной защиты в устройстве с микропроцессорным управлением. В данном примере пределы изменения переменной составляют от 0 до 1.
Специалисты в данной области понимают, что настоящее изобретение может быть реализовано в устройствах и способах, не точно совпадающими с описанными выше. Цифровой разделительный компаратор используется в релейной защите для выполнения в цифровом коде функции(й) фазового компаратора. Цилиндрическое устройство в электромеханических реле является основным элементом в различных устройствах, используемых в релейной защите, включая устройства определения дальности, направленные устройства, устройства максимального или минимального тока, устройства максимального или минимального напряжения, контрольные устройства, и в других специальных применениях. Цифровой компаратор представляет собой фазовый компаратор, который может быть использован для разработки релейных устройств наподобие тех, которые обсуждались выше.
Разработка приведенных выше алгоритмов цифрового компаратора основана на анализе работы цилиндрического устройства, но уравнения были изменены. Они не являются точной моделью цилиндрического устройства. В самом деле, многообразие уравнений, констант, множителей, дальностей и др., которые входят в уравнения, реализуемые в устройстве с микропроцессорным управлением, позволяет конструктору более гибко приспособить работу этого устройства, чем реального цилиндрического устройства.
Реферат
Изобретения относятся к вычислительной технике и могут быть использованы для сравнения комплексных векторных величин. Техническим результатом является выполнение сравнения в реальном времени. Способ и устройство основаны на получении производных от исходных величин, перемножении их, суммировании произведений и масштабировании полученной суммы для получения разности фаз между исходными комплексными векторными величинами. 2 с. и 23 з.п.ф-лы, 10 ил.

Формула
B1k = FK2 [S1k + S1k-1 - FK1 B1k-1 ]
B2k = FK2 [S2k + S2k-1 - FK1 B2k-1]
уравнениям.


где RB и LB являются константами.
B1k = FK2 [S1k + S1k-1 - FK1 B1k-1]
B2k = FK2 [S2k + S2k-1 - FK1 B2k-1]
где FK1 и FK2 являются константами, соответствующими заданным уравнениям.


где RB и LB являются константами.
Комментарии