Система и способ защиты электродвигателя компрессора - RU2586791C2
Код документа: RU2586791C2
Чертежи




Описание
Согласно настоящей заявке испрашивается приоритет в соответствии с заявкой на полезную модель США №13/737,566, поданной 9 января, 2013 года, и приоритет в соответствии с предварительной заявкой на выдачу патента США №61/585,382, поданной 11 января, 2012 года. Раскрытия упомянутых выше заявок ссылкой полностью включены в настоящий документ.
Область техники, к которой относится изобретение
Настоящая заявка относится к системам и способам управления электродвигателями и, более конкретно, к системам и способам ограничения максимального постоянного тока (МПТ).
Уровень техники
Представленное в настоящем документе описание предшествующего уровня техники предназначено для общего представления контекста настоящего раскрытия. Труд изобретателей, указанных на данный момент в качестве авторов настоящего изобретения, в описанной в этом разделе степени, а также аспекты описания, которые не могут квалифицироваться иначе как уровень техники на дату подачи, ни прямо, ни косвенно не признаются уровнем техники, противопоставляемым настоящему раскрытию.
Источник питания, такой как электрическая сеть, может подавать переменный ток к холодильному компрессору. Холодильный компрессор содержит электродвигатель, который приводит в действие холодильный компрессор. Система, содержащая холодильный компрессор, может также содержать одно или более устройств, которые предотвращают протекание к электродвигателю электрического тока, превышающего заданное значение.
Например, может быть установлено линейное устройство защиты таким образом, чтобы электрический ток протекал через линейное устройство защиты перед поступлением в электродвигатель. Линейное устройство защиты может содержать электронагревательное устройство, которое генерирует тепло при протекании электрического тока через линейное устройство защиты. Линейное устройство защиты разъединяет цепь и прекращает поступление электрического тока к электродвигателю, когда значение электрического тока, протекающего через линейное устройство защиты, превышает заданное значение.
Согласно другому примеру устройства с положительным температурным коэффициентом (ПТК) и/или отрицательным температурным коэффициентом (ОТК) могут быть установлены таким образом, чтобы находиться в тепловом контакте с обмоткой электродвигателя для получения температуры относительно температуры электродвигателя. Впоследствии значения сопротивления устройств ПТК и/или ОТК могут быть прямо или косвенно использованы для определения температуры двигателя. В случае если температура электродвигателя, измеренная или определенная при помощи устройств ПТК и/или ОТК, превышает заданную температуру, могут быть предприняты одно или несколько корректирующих воздействий, таких как отключение электродвигателя.
Раскрытие изобретения
Раскрыта система, содержащая холодильный компрессор, содержащий электродвигатель. Указанная система содержит датчик тока, который измеряет электрический ток, поступающий на электродвигатель, и переключающее устройство (например, контактор), сконфигурированное для замыкания и размыкания, чтобы допускать и прекращать поступление электрического тока к электродвигателю, соответственно. Система также содержит устройство ограничения максимального постоянного тока (МПТ), которое генерирует выходной сигнал (например, значение сопротивления устройства ограничения МПТ или сохраненное в цифровой форме значение), соответствующий максимальному постоянному току для электродвигателя. Система содержит модуль защиты электродвигателя, который связывается с устройством ограничения МПТ, датчиком тока и переключающим устройством, и который определяет первое значение МПТ для электродвигателя в зависимости от выходного сигнала устройства ограничения МПТ. Модуль защиты электродвигателя также выборочно устанавливает заданный МПТ равным первому МПТ и управляет переключающим устройством на основании сравнения электрического тока, поступающего к электродвигателю, и заданного МПТ.
Согласно другим вариантам осуществления модуль защиты электродвигателя размыкает переключающее устройство, когда электрический ток, поступающий на электродвигатель, превышает заданный МПТ.
Согласно еще одним вариантам осуществления система дополнительно содержит температурный датчик, который измеряет температуру электродвигателя. Модуль защиты электродвигателя при управлении переключающим устройством также учитывает второе сравнение температуры электродвигателя и заданной температуры.
Согласно дополнительным вариантам осуществления модуль защиты электродвигателя размыкает переключающее устройство, когда указанная температура превышает заданную температуру.
Согласно другим вариантам осуществления устройство ограничения МПТ содержит цифровой программируемый потенциометр, характеризующийся наличием сопротивления.
Согласно еще одним вариантам осуществления модуль защиты электродвигателя выборочно устанавливает сопротивление устройства ограничения МПТ.
Согласно дополнительным вариантам осуществления устройство ограничения МПТ встроено в модуль защиты электродвигателя.
Согласно другим вариантам осуществления модуль защиты электродвигателя при управлении переключающим устройством также учитывает второе сравнение сопротивления устройства ограничения МПТ с заданным диапазоном сопротивления.
Согласно еще одним вариантам осуществления модуль защиты электродвигателя размыкает переключающее устройство, когда сопротивление устройства ограничения МПТ либо меньше заданной нижней границы заданного диапазона сопротивления; либо выше заданной верхней границы заданного диапазона сопротивления.
Согласно дополнительным вариантам осуществления система дополнительно содержит второе устройство ограничения МПТ, которое характеризуется вторым сопротивлением, соответствующим второму МПТ для электродвигателя. Модуль защиты электродвигателя определяет второй МПТ для электродвигателя в зависимости от второго сопротивления; и выборочно устанавливает заданный МПТ равным второму МПТ.
Согласно другим вариантам осуществления модуль защиты электродвигателя устанавливает заданный МПТ равным меньшему из первого и второго МПТ.
Согласно еще одним вариантам осуществления второе устройство ограничения МПТ встроено в холодильный компрессор и выполнено удаленным от модуля защиты электродвигателя.
Согласно дополнительным вариантам осуществления второе устройство ограничения МПТ установлено в кожух холодильного компрессора и выполнено удаленным от модуля защиты электродвигателя.
Согласно другим вариантам осуществления переключающее устройство содержит контактор.
Способ предусматривает: измерение электрического тока, поступающего к электродвигателю холодильного компрессора, при помощи датчика тока; и выборочное размыкание и замыкание переключающего устройства, чтобы допускать и прекращать поступление электрического тока к электродвигателю, соответственно. Способ дополнительно предусматривает: осуществление связи с датчиком тока, переключающим устройством и устройством ограничения максимального постоянного тока (МПТ), при этом устройство ограничения МПТ характеризуется сопротивлением, соответствующим максимальному постоянному току электродвигателя; и определение первого значения МПТ для электродвигателя в зависимости от сопротивления устройства ограничения МПТ. Кроме того, способ предусматривает: выборочную установку заданного МПТ равным первому МПТ; и управление переключающим устройством на основании сравнения электрического тока, поступающего к электродвигателю, и заданного МПТ.
Согласно другим вариантам осуществления способ дополнительно предусматривает размыкание переключающего устройства, когда электрический ток, поступающий на электродвигатель, превышает заданный МПТ.
Согласно еще одним вариантам осуществления способ дополнительно предусматривает: измерение температуры электродвигателя при помощи температурного датчика; и управление переключающим устройством также на основании второго сравнения температуры электродвигателя и заданной температуры.
Согласно дополнительным вариантам осуществления способ дополнительно предусматривает размыкание переключающего устройства, когда указанная температура превышает заданную температуру.
Согласно другим вариантам осуществления определение первого значения МПТ для электродвигателя на основании сопротивления устройства ограничения МПТ предусматривает определение сопротивления цифрового программируемого потенциометра, входящего в состав устройства ограничения МПТ.
Согласно еще одним вариантам осуществления способ дополнительно предусматривает выборочную установку сопротивления устройства ограничения МПТ.
Согласно дополнительным вариантам осуществления способ дополнительно предусматривает определение сопротивления устройства ограничения МПТ, при этом устройство ограничения МПТ встроено в модуль защиты электродвигателя.
Согласно другим вариантам осуществления способ дополнительно предусматривает управление переключающим устройством также на основании второго сравнения сопротивления устройства ограничения МПТ с заданным диапазоном сопротивления.
Согласно еще одним вариантам осуществления способ дополнительно предусматривает размыкание переключающего устройства, когда сопротивление устройства ограничения МПТ либо меньше заданной нижней границы заданного диапазона сопротивления; либо выше заданной верхней границы заданного диапазона сопротивления.
Согласно дополнительным вариантам осуществления способ дополнительно предусматривает: определение второго МПТ для электродвигателя в зависимости от второго сопротивления второго устройства ограничения МПТ; и выборочную установку заданного МПТ для второго МПТ.
Согласно другим вариантам осуществления способ дополнительно предусматривает установку заданного МПТ равным меньшему из первого и второго МПТ.
Согласно еще одним вариантам осуществления способ дополнительно предусматривает определение второго сопротивления второго устройства ограничения МПТ, при этом второе устройство ограничения МПТ встроено в холодильный компрессор и выполнено удаленным от модуля защиты электродвигателя.
Согласно дополнительным вариантам осуществления способ дополнительно предусматривает определение второго сопротивления второго устройства ограничения МПТ, при этом второе устройство ограничения МПТ вмонтировано в кожух холодильного компрессора и выполнено удаленным от модуля защиты электродвигателя.
Дополнительные области применения настоящего раскрытия станут очевидными при прочтении подробного раскрытия, приведенного ниже. Следует понимать, что подробное раскрытие и конкретные примеры приведены лишь в иллюстративных целях, при этом они не предназначены для ограничения объема настоящего раскрытия.
Краткое описание чертежей
Далее, в целях более полного понимания, настоящее раскрытие будет более подробно описано со ссылками на прилагаемые фигуры, где:
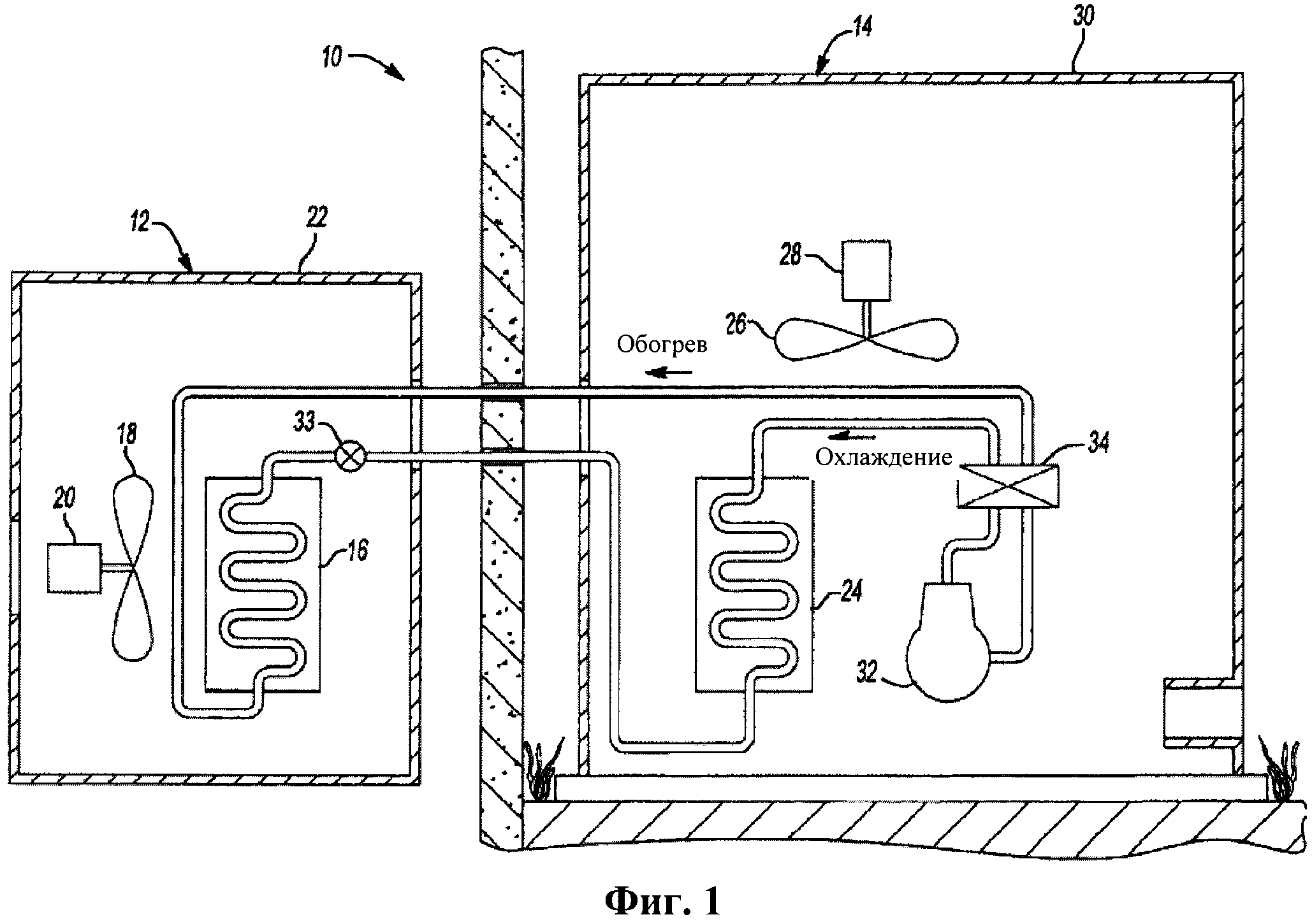
на Фиг. 1 представлена схематическая иллюстрация теплонасосной системы;
на Фиг. 2 представлена функциональная схема примерной системы управления электродвигателем;
на Фиг. 3A-3C представлены функциональные схемы примерных систем управления током; и
на Фиг. 4 представлена блок-схема, иллюстрирующая примерный способ управления протеканием электрического тока к электродвигателю.
Осуществление изобретения
Приведенное ниже описание является в сущности иллюстративным, и ни в коем случае не предназначено для ограничения настоящего раскрытия, его практического применения или вариантов использования. Для большей ясности, на фигурах для обозначения подобных элементов будут использованы одинаковые позиции. В контексте настоящего документа, фраза «по меньшей мере один из A, B и C» должна истолковываться как логическое (A или B или C), при этом используется неисключающее логическое ИЛИ. Следует понимать, что стадии, входящие в способ, могут быть выполнены в различном порядке без изменения принципов настоящего раскрытия.
В контексте настоящего документа, термин «модуль» может относиться к, быть частью или включать специализированную интегральную схему; электронную схему; комбинационную логическую схему; программируемую вентильную матрицу; процессор (общий, специализированный или групповой), который выполняет код; другие пригодные компоненты аппаратного обеспечения, которые обеспечивают описанные функциональные средства; или сочетание некоторых или всех описанных выше устройств, например, в системе на кристалле. Термин «модуль» может включать запоминающее устройство (общее, специализированное или групповое), которое хранит исполняемые процессором коды.
Упомянутый выше термин «код» может включать программное обеспечение, аппаратно реализованное программное обеспечение и/или микрокод, и может относиться к программам, рутинным операциям, функциям, классам и/или объектам. Упомянутый выше термин «общий» означает, что некоторые или все коды из множества модулей могут быть исполнены при помощи одного (общего) процессора. Кроме того, некоторые или все коды из множества модулей могут быть сохранены посредством одного (общего) запоминающего устройства. Упомянутый выше термин «групповой» означает, что некоторые или все коды из одного модуля могут быть исполнены при помощи группы процессоров или группы исполнительных механизмов. Например, несколько ядер и/или несколько потоков процессора могут рассматриваться в качестве исполнительных механизмов. Согласно различным реализациям исполнительные механизмы могут быть сгруппированы по процессору, по нескольким процессорам и по процессорам, расположенным в нескольких местах, например, нескольким серверам, сконфигурированным для параллельной обработки данных. Кроме того, некоторые или все коды из одного модуля могут быть сохранены при помощи группы запоминающих устройств.
Устройства и способы, описанные в настоящем документе, могут быть реализованы одной или несколькими компьютерными программами, исполняемыми одним или несколькими процессорами. Компьютерные программы содержат исполняемые процессором команды, которые хранятся в энергонезависимом материальном носителе, считываемом компьютером. Компьютерные программы могут также включать сохраненные данные. Неограничивающими примерами энергонезависимого материального носителя, считываемого компьютером, являются энергонезависимое запоминающее устройство, магнитное запоминающее устройство и оптическое запоминающее устройство.
Основной изготовитель оборудования (ОИО), такой как изготовитель компрессоров, определяет, исходя из множества различных факторов, максимальный постоянный ток (МПТ) для электродвигателя холодильного компрессора. Например, МПТ для электродвигателя может быть установлен исходя из выходной мощности электродвигателя (например, выраженной в лошадиных силах), одной или нескольких характеристик холодильного компрессора, типа холодильного агента и рабочего диапазона. Рабочий диапазон может включать в себя температурный диапазон испарителя и температурный диапазон конденсатора, в которых допускается функционирование холодильного компрессора.
ОИО может оснастить холодильный компрессор устройством ограничения МПТ. Например, устройство ограничения МПТ может быть встроено в модуль управления, который осуществляет управление электродвигателем и холодильным компрессором, встроено в электродвигатель или реализовано другим подходящим образом. Устройство ограничения МПТ генерирует выходной сигнал, такой как значение сопротивления или сохраненное цифровое значение. Выходной сигнал устройства ограничения МПТ соответствует значению МПТ, определенному ОИО.
Модуль управления может выборочно остановить поступление электрического тока к электродвигателю на основании выходного сигнала устройства ограничения МПТ. Например, модуль управления может остановить поступление электрического тока к электродвигателю, когда выходной сигнал устройства ограничения МПТ находится за пределами заданного диапазона значений. Заданный диапазон значений может быть установлен таким, что выходной сигнал устройства ограничения МПТ будет находиться выше или ниже указанного диапазона, когда устройство ограничения МПТ разомкнуто или закорочено.
Модуль управления может также определять заданный МПТ для электродвигателя на основании выходного сигнала устройства ограничения МПТ. Электродвигатель потребляет электрический ток для обеспечения работы холодильного компрессора. Один или несколько датчиков тока измеряют поступление электрического тока к электродвигателю. Модуль управления может выборочно останавливать поступление электрического тока к электродвигателю, когда электрический ток, поступающий на электродвигатель, превышает заданный МПТ.
Согласно различным реализациям могут быть выполнены одно или несколько дополнительных устройств ограничения МПТ. Например, системный разработчик может предусмотреть дополнительное устройство ограничения МПТ, которое задает величину заданного МПТ, которая не может быть превышена устройством ограничения МПТ, предусмотренным ОИО. Системный разработчик может предусмотреть дополнительное устройство ограничения МПТ, например, когда один или несколько параметров рабочего диапазона могут быть снижены по сравнению с рабочим диапазоном, используемым ОИО при установке значения МПТ для электродвигателя. Системный разработчик может предусмотреть дополнительное устройство (устройства) ограничения МПТ в структуре холодильной системы или системы переменного тока за пределам корпуса компрессора. Дополнительное устройство (устройства) ограничения МПТ может (могут) быть соединено (соединены) с модулем управления посредством физического соединения или беспроводного соединения (например, беспроводной связи ближнего радиуса действия).
Модуль управления определяет выходной сигнал (например, значение сопротивления) дополнительного устройства ограничения МПТ, а также определяет второй МПТ для электродвигателя на основании выходного сигнала дополнительного устройства ограничения МПТ. Модуль управления может выборочно устанавливать заданный МПТ равным МПТ, определенному на основании выходного сигнала устройства ограничения МПТ, или второму МПТ, определенному на основании значения сопротивления дополнительного устройства ограничения МПТ. Например, модуль управления может устанавливать заданный МПТ равным меньшему из указанных значений МПТ. Таким образом, если второй МПТ меньше МПТ, установленного ОИО, то модуль управления остановит поступление электрического тока к электродвигателю, когда электрический ток, поступающий к электродвигателю, превышает второй МПТ. Тем не менее, если второй МПТ превышает МПТ, указанный ОИО, то будет использован МПТ, указанный ОИО.
Рассмотрим теперь Фиг. 1, на которой представлена примерная схема теплонасосной системы 10. Теплонасосная система 10 может содержать внутренний блок 12 и наружный блок 14. Теплонасосная система используется лишь в качестве примера и следует понимать, что изобретение, раскрытое в настоящей заявке, может быть применено к другим системам, содержащим приводимый электродвигателем компрессор, например, системам кондиционирования воздуха и холодильным системам.
Внутренний блок 12 может содержать внутренний змеевик или теплообменник 16 и внутренний вентилятор 18 с переменной скоростью. Внутренний вентилятор 18 приводится в действие электродвигателем 20. Внутренний змеевик 16 и внутренний вентилятор 18 могут быть заключены в кожух 22, при этом внутренний вентилятор 18 выполнен с возможностью нагнетания воздуха через внутренний змеевик 16.
Наружный блок 14 может содержать наружный змеевик или теплообменник 24 и наружный вентилятор 26 с переменной скоростью. Наружный вентилятор 26 приводится в действие электродвигателем 28. Наружный змеевик 24 и наружный вентилятор 26 могут быть заключены в кожухе 30, при этом наружный вентилятор 26 может обеспечивать движение воздуха через наружный змеевик 24. Наружный блок 14 может дополнительно содержать компрессор 32, соединенный с внутренним змеевиком 16 и наружным змеевиком 24. Компрессор 32 может характеризоваться наличием электродвигателя, который запитывается инверторной схемой управления, обеспечивающей переменную скорость, как представлено на фигуре (см. также фиг. 2), или электродвигателя с постоянной скоростью.
Компрессор 32, внутренний змеевик 16 и наружный змеевик 24 могут быть соединены друг с другом для образования замкнутого контура, при этом компрессор 32, внутренний змеевик 16 и наружный змеевик 24 расположены последовательно друг за другом, а расширительное устройство 33 расположено между внутренним змеевиком 16 и наружным змеевиком 24. Теплонасосная система 10 может содержать реверсивный клапан 34, расположенный между компрессором 32 и внутренним и наружным змеевиками 16 и 24. Реверсивный клапан 34 выполнен с возможностью изменения (реверса) направления потока, протекающего между компрессором 32, внутренним змеевиком 16 и наружным змеевиком 24, при этом поток может характеризоваться первым и вторым направлениями.
Когда поток протекает в первом направлении, теплонасосная система 10 функционирует в режиме охлаждения, обеспечивая поток в направлении, отмеченном стрелкой, подписанной «охлаждение». В режиме охлаждения компрессор 32 обеспечивает подачу текучей среды (например, холодильного агента) к наружному змеевику 24. После этого текучая среда поступает во внутренний змеевик 16, а затем возвращается в компрессор 32. В режиме охлаждения внутренний змеевик 16 функционирует в качестве испарительного змеевика, а наружный змеевик 24 функционирует в качестве конденсационного змеевика.
Когда поток протекает во втором направлении, теплонасосная система 10 функционирует в режим обогрева, обеспечивая поток в направлении, отмеченном стрелкой, подписанной «обогрев». В режиме обогрева, направление потока реверсировано относительно первого направления. Компрессор 32 обеспечивает подачу текучей среды во внутренний змеевик 16. После этого текучая среда поступает к наружному змеевику 24, а затем возвращается в компрессор 32. В режиме обогрева внутренний змеевик 16 функционирует в качестве конденсационного змеевика, а наружный змеевик 24 функционирует в качестве испарительного змеевика.
Рассмотрим теперь Фиг. 2, на которой представлена функциональная схема примерной системы управления электродвигателем. Электрическая сеть 102 может обеспечивать подачу переменного тока для потребителя 114. Электропитание переменного тока может представлять собой трехфазное электропитание переменного тока, как представлено на фигуре, или однофазное электропитание переменного тока. Потребитель 114 может включать теплонасосную систему 10, компрессор 32, систему 104 коррекции коэффициента мощности (ККМ), модуль 106 управления, электродвигатель 108, выпрямительное устройство ПО, переключающее устройство 112, инверторную схему 116 управления и датчики 121, 122, 123 и 124.
Потребитель 114 может характеризоваться наличием нагрузки, которая содержит компрессор 32 и теплонасосную систему 10. Хотя один или несколько компонентов изображены на Фиг. 2 отдельно от теплонасосной системы 10, например, компрессор 32, один или несколько компонентов могут быть выполнены как одно целое с теплонасосной системой 10. Электродвигатель 108 теплонасосной системы 10 может быть выполнен как одно целое с компрессором 32 теплонасосной системы 10. Электродвигатель 108 может запитываться прямо от электрической сети 102 через переключающее устройство 112, но лишь в качестве примера указанный электродвигатель запитывается при помощи инверторной схемы 116 управления, обеспечивающей переменную скорость, которая входит в состав компрессора 32.
Датчик 121 может измерять поступление электрического тока через один из трех вводов электропитания переменного тока. Например, датчик 121 может содержать преобразователь тока (ПТ). Потребление электроэнергии может быть выражено в амперах. Датчик 121 может также измерять напряжение и мощность (например, в вольт-амперах), обеспечиваемые электрической сетью 102. Датчик 121 может также обеспечить показание в Ватт-часах электроэнергии, фактически потребленной потребителем 114. Датчик 121 может быть расположен в различных положениях относительно потребителя 114 или электрической сети 102. Датчик 121 может быть расположен, например, после переключающего устройства 112 и перед системой 104 ККМ и выпрямительным устройством 110.
Датчик 122 может измерять поступление электрического тока через другой из трех вводов электропитания переменного тока. Например, датчик 122 может содержать ПТ. Потребление электроэнергии может быть выражено в амперах. Датчик 122 может также измерять напряжение и мощность (например, в вольт-амперах), потребляемые инверторной схемой 116 управления. Датчик 122 может также обеспечить показание в Ватт-часах электроэнергии, фактически потребленной потребителем 114. Датчик 122 может быть расположен в различных положениях относительно потребителя 114 или электрической сети 102. Согласно различным реализациям датчик 121 и датчик 122 могут быть реализованы совместно внутри двойного сенсорного модуля 125.
Система 104 ККМ может быть присоединена для получения тока, поступающего от переключающего устройства 112. Система 104 ККМ может быть любым подходящим устройством, которое улучшает коэффициент мощности нагрузки.
Например, система 104 ККМ может включать пассивную ККМ, например, батарею конденсаторов, используемых для баланса индукционной нагрузки, или катушку индуктивности для баланса емкостной нагрузки. Например, система 104 ККМ может включать стандартную активную систему ККМ, которая активно обеспечивает высокий коэффициент мощности, например, коэффициент мощности, приближающийся к 1,0. Модуль 106 управления может управлять переключением системы 104 ККМ, если система 104 ККМ представляет собой активную систему ККМ. Выпрямительное устройство 110 также может быть присоединено для получения тока, поступающего от переключающего устройства 112.
Ток может поступать к инверторной схеме 116 управления от системы 104 ККМ и/или выпрямительного устройства 110. Инверторная схема 116 управления питает электродвигатель 108. Инверторная схема 116 управления может управлять скоростью вращения электродвигателя 108 для того, чтобы регулировать работу компрессора 32 теплонасосной системы 10. Модуль 106 управления может осуществлять переключение инверторной схемы 116 управления, чтобы изменять скорость вращения электродвигателя 108.
Датчик 123 может быть установлен в электродвигателе 108 и может измерять температуру электродвигателя 108. Например, датчик 123 может включать датчик с отрицательным температурным коэффициентом (ОТК), датчик с положительным температурным коэффициентом (ПТК), термистор или другой подходящий тип температурного датчика. Датчик 123 может измерять, например, температуру магнитного провода электродвигателя 108. Датчик 123 может также измерять один или несколько других параметров электродвигателя 108, таких как ток, напряжение, рабочую скорость компрессора и/или заданную рабочую скорость и т.п. Каждый из датчиков 121, 122 и 123 может представлять собой один датчик или несколько датчиков, которые предоставляют результаты измерения модулю 106 управления. Датчик 124 может представлять собой один датчик или несколько датчиков, которые измеряют параметры теплонасосной системы 10. Например, датчик 124 может измерять температуру и/или давление нагнетания, температуру и/или давление всасывания, температуру и/или давление в конденсаторе, температуру и/или давление в испарителе, скорость компрессора, температуру и/или давление холодильного агента и т.п.
Переключающее устройство 112 может представлять собой любое устройство или сочетание устройств, которое позволяет (допускает) и прекращает (предотвращает) поступление электрического тока к электродвигателю 108. Переключающее устройство 112 может представлять собой электрический переключатель, контактор, реле или другое подходящее переключающее устройство. Согласно различным реализациям переключающее устройство 112 может быть установлено, например, между датчиком 121 и электрической сетью 102. Тем не менее, переключающее устройство 112 может быть расположено в другом подходящем месте перед электродвигателем 108.
Модуль 106 управления может включать модуль 130 защиты электродвигателя. Модуль 130 защиты электродвигателя может управлять переключающим устройством 112, исходя из одного или нескольких параметров, например, для обеспечения защиты электродвигателя 108. Модуль 130 защиты электродвигателя может управлять переключающим устройством 112, исходя из температуры электродвигателя 108, измеренной датчиком 123. Например, модуль 130 защиты электродвигателя может управлять переключающим устройством 112 для того, чтобы допустить поступление электрического тока к электродвигателю 108, когда указанная температура меньше заданной температуры. И наоборот, модуль 130 защиты электродвигателя может управлять переключающим устройством 112 для того, чтобы прекратить поступление электрического тока к электродвигателю 108, когда указанная температура превышает заданную температуру.
Модуль 130 защиты электродвигателя может дополнительно или альтернативно управлять переключающим устройством 112 на основании измеренного потребления тока электродвигателем 108. Например, модуль 130 защиты электродвигателя посредством переключающего устройства 112 может допустить поступление электрического тока к электродвигателю 108, когда электрический ток меньше заданного максимального постоянного тока (МПТ). И наоборот, модуль 130 защиты электродвигателя посредством переключающего устройства 112 может запретить поступление электрического тока к электродвигателю 108, когда электрический ток превышает заданный максимальный постоянный ток (МПТ). Модуль 130 защиты электродвигателя может прекратить поступление электрического тока к электродвигателю 108 в течение заданного периода, когда электрический ток превышает заданный МПТ.
Первое устройство ограничения МПТ (например, см. фиг. 3A-B) может характеризоваться наличием сопротивления. Первое устройство ограничения МПТ может быть встроено в модуль 106 управления или встроено в компрессор 32. Модуль 130 защиты электродвигателя определяет первый МПТ на основании сопротивления первого устройства ограничения МПТ или цифрового значения, выдаваемого первым устройством ограничения МПТ. Сопротивление первого устройства ограничения МПТ или цифровое значение, выдаваемое первым устройством ограничения МПТ, может быть установлено, например, основным изготовителем оборудования (например, изготовителем компрессора), чтобы указать МПТ для рабочего диапазона и характеристик электродвигателя 108, компрессора 32 и типа используемой текучей среды. Рабочий диапазон может включать диапазон значений температуры испарителя и диапазон значений температуры конденсатора, в пределах которых модуль 130 защиты электродвигателя может управлять компрессором 32.
Модуль 130 защиты электродвигателя может также управлять работой переключающего устройства 112 для того, чтобы прекращать поступление электрического тока к электродвигателю 108, когда выходной сигнал первого устройства ограничения МПТ указывает на то, что первое устройство ограничения МПТ было закорочено или имеет место обрыв цепи. Например, модуль 130 защиты электродвигателя может прекратить поступление электрического тока к электродвигателю 108, когда сопротивление первого устройства ограничения МПТ приблизительно равно нулю (короткое замыкание) или стремится к бесконечности (обрыв цепи). Прекращение протекания электрического тока к электродвигателю 108, когда первое устройство ограничения МПТ закорочено или имеет место обрыв цепи, может защитить электродвигателя 108 в случае попытки обхода первого устройства ограничения МПТ.
Согласно различным реализациям также может быть предусмотрено второе устройство 132 ограничения МПТ. Второе устройство 132 ограничения МПТ удалено от модуля 106 управления. Второе устройство 132 ограничения МПТ может быть, например, встроено в компрессор 32 или вмонтировано в структуру системы, такую как кожух 30. Второе устройство 132 ограничения МПТ может также характеризоваться наличием сопротивления. Например, системный разработчик может установить второе устройство 132 ограничения МПТ и подобрать сопротивление второго устройства 132 ограничения МПТ, например, ниже цепи распределения, предусмотренной основным изготовителем оборудования.
Сопротивление второго устройства 132 ограничения МПТ может быть выбрано для обеспечения второго МПТ. Модуль 130 защиты электродвигателя определяет второй МПТ на основании сопротивления второго устройства 132 ограничения МПТ. Модуль 130 защиты электродвигателя выборочно устанавливает заданный МПТ, который используется для разрешения и прекращения протекания электрического тока к электродвигателю 108, равным первому МПТ или второму МПТ.
Например, когда первый МПТ превышает второй МПТ, модуль 130 защиты электродвигателя может установить заданный МПТ равным второму МПТ. Таким образом, электрический ток, потребляемый электродвигателем 108, может быть ограничен вторым МПТ, установленным с использованием второго устройства 132 ограничения МПТ. Системный разработчик может выбрать размер контактора, диаметр применяемых проводов, предохранители и один или несколько электрических компонентов на основании второго МПТ. При данных условиях, которые допускают использование второго МПТ в качестве заданного МПТ, себестоимость может быть снижена, так как могут быть использованы меньший диаметр применяемых проводов, меньшие контакторы и т.п.
Тем не менее, если второй МПТ превышает первый МПТ, модуль 130 защиты электродвигателя может установить заданный МПТ равным первому МПТ. Использование первого МПТ в качестве заданного МПТ, когда второй МПТ превышает первый МПТ, может предотвратить обход или отсоединение первого устройства ограничения МПТ.
В случае замены одного или более из модуля 106 управления, второго устройства 132 ограничения МПТ и компрессора 32 (например, по эксплуатационным причинам), модуль 130 защиты электродвигателя может назначить заданный МПТ. Например, при замене модуля 106 управления новый модуль управления может определить первый и второй МПТ, а также определить заданный МПТ на основании первого и второго МПТ. При замене второго устройства 132 ограничения МПТ модуль 106 управления может определить новое значение второго МПТ и определить заданный МПТ на основании первого МПТ и (нового) второго МПТ.
На Фиг. 3A-3C представлены функциональные схемы примерных систем управления током. Рассмотрим теперь Фиг. 3A, на которой представлена схема примерной системы управления током. Модуль 130 защиты электродвигателя может содержать первое устройство 202 ограничения МПТ. Первое устройство 202 ограничения МПТ может выдавать первое значение 206 напряжения, которое соответствует сопротивлению резистора 204 первого устройства 202 ограничения МПТ. Например, резистор 204 может представлять собой программируемый потенциометр, такой как цифровой программируемый потенциометр (ЦПП), или другой подходящий тип устройства с программируемым сопротивлением.
Микроконтроллер, микропроцессор или другое подходящее устройство 210 может выборочно устанавливать (программировать) сопротивление первого устройства 202 ограничения МПТ, например, на основании данных, поступающих от средства технического обслуживания (не показано), сетевого соединения и/или других подходящих данных, поступающих из одного или нескольких источников.
Микроконтроллер 210 выборочно определяет сопротивление первого устройства 202 ограничения МПТ на основании первого значения 206 напряжения. Например, микроконтроллер 210 может определить сопротивление первого устройства 202 ограничения МПТ с использованием либо функции, либо алгоритма преобразования (например, при помощи справочной таблицы), который связывает напряжение с сопротивлением, и первого значения 206 напряжения в качестве исходной величины. Указанная функция или алгоритм преобразования могут быть сохранены, например, в запоминающем устройстве 214. Например, запоминающее устройство 214 может включать электрически-стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) и/или один или несколько других подходящих физических носителей.
Микроконтроллер 210 определяет первый МПТ на основании сопротивления первого устройства 202 ограничения МПТ. Например, микроконтроллер 210 может определить первый МПТ с использованием либо функции, либо алгоритма преобразования (например, при помощи справочной таблицы), который связывает сопротивление с МПТ, и сопротивления первого устройства 202 ограничения МПТ в качестве исходной величины.
Микроконтроллер 210 выборочно допускает и прекращает поступление электрического тока к электродвигателю 108 через переключающее устройство 112 при помощи выходного сигнала 212, поступающего в модуль защиты 215. Например, микроконтроллер 210 может установить для выходного сигнала 212 либо первое состояние, либо второе состояние в определенное время, и модуль защиты может либо допустить, либо прекратить поступление электрического тока к электродвигателю 108 через переключающее устройство 112 на основании состояния выходного сигнала 212. Микроконтроллер 210 может допустить или прекратить поступление электрического тока к электродвигателю другим подходящим способом. Например, микроконтроллер 210 может запретить переключение инверторной схемы 116 управления с тем, чтобы предотвратить поступление электрического тока к электродвигателю 108.
Микроконтроллер 210 выборочно прекращает поступление электрического тока к электродвигателю 108 на основании сопротивления первого устройства 202 ограничения МПТ. Например, микроконтроллер 210 прекращает поступление электрического тока к электродвигателю 108, когда сопротивление первого устройства 202 ограничения МПТ выходит за пределы заданного диапазона сопротивления. Микроконтроллер 210 может допустить поступление электрического тока к электродвигателю 108, когда сопротивление первого устройства 202 ограничения МПТ находится в пределах заданного диапазона сопротивления.
Нижняя граница заданного диапазона сопротивления может быть установлена достаточно близко к нулю таким образом, чтобы сопротивление первого устройства 202 ограничения МПТ, находящее ниже нижней границы, указывало на то, что первое устройство 202 ограничения МПТ закорочено. Верхняя граница заданного диапазона сопротивления может быть установлена достаточно высоко по сравнению с максимальным сопротивлением таким образом, чтобы сопротивление первого устройства 202 ограничения МПТ, превышающее верхнюю границу, указывало на то, что первое устройство 202 ограничения МПТ разомкнуто или что микроконтроллер 210 и первое устройство 202 ограничения МПТ разъединены.
Микроконтроллер 210 может принять решение о необходимости определения второго МПТ на основании второго значения 218 напряжения. Первый вывод токоограничивающего резистора 222 может быть присоединен к потенциалу 226. Второй вывод токоограничивающего резистора 222 может быть соединен с микроконтроллером 210 и с первым выводом устройства 230, снабженного перемычкой. Второй вывод устройства 230, снабженного перемычкой, может быть соединен с массой 234.
Посредством установки или снятия перемычки 238 между первым и вторым выводами устройства 230, снабженного перемычкой, осуществляют управление вторым значением 218 напряжения. Например, когда перемычка 238 установлена, она создает соединение между первым выводом и вторым выводом устройства 230, снабженного перемычкой, в результате этого второе значение 218 напряжения становится приблизительно равным первому заданному значению напряжения. Когда перемычка 238 отсутствует, второе значение 218 напряжения становится приблизительно равным второму заданному значению напряжения.
ОИО может предоставить модуль 130 защиты электродвигателя, содержащий перемычку 238, соединяющую первый и второй выводы устройства 230, снабженного перемычкой. Микроконтроллер 210 может определить второй МПТ на основании сопротивления второго устройства 132 ограничения МПТ, когда второе значение 218 напряжения приблизительно равно первому заданному значению напряжения. Согласно различным реализациям противоположное может иметь место. Модуль 130 защиты электродвигателя может быть выполнен без перемычки 238, соединяющей первый и второй выводы устройства 230, снабженного перемычкой, и микроконтроллер 210 может определить второй МПТ на основании сопротивления второго устройства 132 ограничения МПТ, когда второе значение 218 напряжения приблизительно равно второму заданному значению напряжения.
Первый модуль 242 формирования сигнала может быть соединен со вторым устройством 132 ограничения МПТ. Первый модуль 242 формирования сигнала принимает сигнал (например, значение напряжения), поступающий от второго устройства 132 ограничения МПТ, который соответствует сопротивлению резистора 246, входящего в состав второго устройства 132 ограничения МПТ. Первый модуль 242 формирования сигнала может также выдавать эталонное напряжение (не показано) во второе устройство 132 ограничения МПТ. Первый модуль 242 формирования сигнала выдает третье значение 250 напряжения, которое соответствует сопротивлению резистора 246 второго устройства 132 ограничения МПТ. Первый модуль 242 формирования сигнала может формировать сигнал одним или несколькими способами для генерирования третьего значения 250 напряжения, например, при помощи фильтрации, буферизации, оцифровывания и/или осуществления одного или нескольких других подходящих действий для формирования сигнала.
Микроконтроллер 210 выборочно определяет сопротивление второго устройства 132 ограничения МПТ на основании третьего значения 250 напряжения. Например, микроконтроллер 210 может определить сопротивление второго устройства 132 ограничения МПТ с использованием либо функции, либо алгоритма преобразования (например, при помощи справочной таблицы), который связывает напряжение с сопротивлением, и третьего значения 250 напряжения в качестве исходной величины. Микроконтроллер 210 определяет второй МПТ на основании сопротивления второго устройства 132 ограничения МПТ. Например, микроконтроллер 210 может определять второй МПТ с использованием либо функции, либо алгоритма преобразования (например, при помощи справочной таблицы), который связывает сопротивление с МПТ, и сопротивления второго устройства ограничения МПТ 132 в качестве исходной величины.
Микроконтроллер 210 выборочно устанавливает заданный МПТ равным одному из первого МПТ и второго МПТ. Например, когда второй МПТ не определен (например, когда перемычка 238 установлена), микроконтроллер 210 может установить заданный МПТ равным первому МПТ. Когда второй МПТ определен, микроконтроллер 210 может установить заданный МПТ равным меньшему из первого и второго МПТ. Таким образом, когда сопротивление второго устройства 132 ограничения МПТ устанавливают так, что второй МПТ превышает первый МПТ, заданный МПТ будет установлен равным первому МПТ, чтобы предотвратить превышение первого МПТ. Дополнительно, когда сопротивление второго устройства 132 ограничения МПТ установлено так, что второй МПТ меньше первого МПТ, заданный МПТ будет установлен равным второму МПТ так, чтобы потребление электроэнергии электродвигателя 108 может быть ограничено значением, меньшим первого МПТ. Ограничение потребления электроэнергии электродвигателем 108 до значения, которое меньше первого МПТ, может позволить использовать меньший диаметр проводов и меньшие электрические контакторы. Применение меньшего диаметра проводов и меньших электрических контакторов может обеспечить снижение себестоимости.
Хотя настоящая заявка описана в отношении одного второго устройства ограничения МПТ, согласно различным реализациям могут быть использованы одно или несколько дополнительных вторых устройств ограничения МПТ. Микроконтроллер 210 может определить значение (значения) сопротивления одного или нескольких дополнительных вторых устройств ограничения МПТ, определить значение (значения) МПТ на основании указанного значения (значений) сопротивления, и установить заданный МПТ равным наименьшему из значений МПТ.
Согласно различным реализациям микроконтроллер 210 может установить заданный МПТ равным одному из первого и второго значения МПТ на основании выходного сигнала 254 из модуля 258 сравнения. Например, модуль 258 сравнения может представлять собой триггер Шмидта или другой подходящий тип сравнивающего устройства. В модуль 258 сравнения могут поступать первое значение 206 напряжения (соответствующее сопротивлению первого устройства 202 ограничения МПТ) и третье значение 250 напряжения (соответствующее сопротивлению второго устройства 132 ограничения МПТ). Модуль 258 сравнения сравнивает первое значение 206 напряжения с третьим значением 250 напряжения и генерирует выходной сигнал 254 на основании сравнения.
Например, модуль 258 сравнения может устанавливать для выходного сигнала 254 первое состояние, когда соотношение первого значения 206 и третьего значения 250 напряжения является таким, что первый МПТ меньше второго МПТ. После того, как модуль 258 сравнения установил для выходного сигнала 254 первое состояние, модуль 258 сравнения может перевести выходной сигнал 254 во второе состояние, когда соотношение первого значения 206 и третьего значения 250 напряжения является таким, что второй МПТ меньше первого МПТ, по меньшей мере, на заданное значение. Когда выходной сигнал 254 находится в первом состоянии, микроконтроллер 210 может установить заданный МПТ равным первому МПТ. Микроконтроллер 210 может устанавливать заданный МПТ равным второму МПТ, когда выходной сигнал 254 находится во втором состоянии.
Второй модуль 262 формирования сигнала может быть соединен с датчиком
121. Второй модуль 262 формирования сигнала получает сигнал (например, значение напряжения), поступающий от датчика 121, который соответствует электрическому току, протекающему через переключающее устройство 112. Второе модуль 262 формирования сигнала выдает четвертое значение 266 напряжения, которое соответствует электрическому току, протекающему через переключающее устройство 112. Второй модуль 262 формирования сигнала может формировать сигнал одним или несколькими способами для генерирования четвертого значения 266 напряжения, например, при помощи фильтрации, буферизации, оцифровывания и/или осуществления одного или нескольких других подходящих действий для формирования сигнала. Микроконтроллер 210 может определить первое значение тока при помощи либо функции, либо алгоритма преобразования, который связывает напряжение с током, используя четвертое значение 266 напряжения в качестве исходной величины.
Третий модуль 270 формирования сигнала может быть соединен с датчиком 122. Третий модуль 270 формирования сигнала получает сигнал (например, значение напряжения), поступающий от датчика 122, который соответствует электрическому току, протекающему к инверторной схеме 116 управления. Третий модуль 270 формирования сигнала выдает пятое значение 274 напряжения, которое соответствует электрическому току, протекающему к инверторной схеме 116 управления. Третий модуль 270 формирования сигнала может формировать сигнал одним или несколько способами для генерирования пятого значения 274 напряжения, например, при помощи фильтрации, буферизации, оцифровывания и/или осуществления одного или нескольких других подходящих действий для формирования сигнала. Микроконтроллер 210 может определить второе значение тока при помощи либо функции, либо алгоритма преобразования, который связывает напряжение с током, используя пятое значение 274 в качестве исходной величины.
Микроконтроллер 210 выборочно допускает и прекращает поступление электрического тока к электродвигателю 108 на основании электрического тока, поступающего к электродвигателю 108, и заданного МПТ. Первое значение тока, второе значение тока, значение тока, определенное на основании первого и второго значений тока, или другое надлежащим образом измеренное значение тока может быть использовано в качестве значения электрического тока, поступающего к электродвигателю 108. Микроконтроллер 210 прекращает поступление электрического тока к электродвигателю 108, когда электрический ток, поступающий на электродвигатель 108, превышает заданный МПТ. И наоборот, микроконтроллер 210 допускает поступление электрического тока к электродвигателю 108, когда электрический ток, протекающий электродвигателю 108, меньше заданного МПТ.
Когда электрический ток, поступающий на электродвигатель 108, превышает заданный МПТ, микроконтроллер 210 может подождать перед отключением электрического тока, поступающего на электродвигатель 108, в течение заданного периода после превышения электрическим током, поступающим на электродвигатель 108, заданного МПТ. Если поступление электрического тока к электродвигателю 108 становится меньшим заданного МПТ в течение заданного периода, микроконтроллер 210 может отменить решение отключить поступление электрического тока к электродвигателю 108 и сохранить поступление электрического тока к электродвигателю 108.
Тем не менее, при соблюдении одного или нескольких заданных условий микроконтроллер 210 может прекратить поступление электрического тока к электродвигателю 108 в течение заданного периода. Например, микроконтроллер 210 может отключить поступление электрического тока к электродвигателю 108 в течение заданного периода, когда скорость изменения (di/dt) поступления электрического тока к электродвигателю 108 превышает заданную скорость изменения. Дополнительно или альтернативно, микроконтроллер 210 может отключить поступление электрического тока к электродвигателю 108 в течение заданного периода, когда ускорение (d2i/dt2) поступления электрического тока к электродвигателю 108 превышает заданное ускорение. Дополнительно или альтернативно, микроконтроллер 210 может отключить поступление электрического тока к электродвигателю 108 в течение заданного периода, когда электрический ток, поступающий к электродвигателю 108, становится больше заданного электрического тока, то есть превышает заданный МПТ на заданный процент. Например, заданный процент может равняться 5 процентам, 10 процентам, 15 процентам или другому подходящему выраженному в процентах значению. Дополнительно или альтернативно, микроконтроллер 210 может отключать поступление электрического тока к электродвигателю 108 во время заданного периода, когда значение электрического заряда превышает заданное значение электрического заряда. Микроконтроллер 210 может определить значение электрического заряда, например, на основании (математического) интеграла электрического тока, поступающего к электродвигателю 108 за указанный период. Например, математический интеграл может быть выражен следующим образом:

где МПТзад - заданное значение МПТ, и I - измеренное значение электрического тока, чтобы сделать ссылку на заданное значение МПТ. Когда измеренное значение электрического тока превышает заданное значение МПТ, значение электрического заряда (например, выраженное в Кулонах) увеличивается из-за положительной разницы между измеренным значение электрического тока и заданным значением МПТ. Отрицательная разница между измеренным значением электрического тока и заданным значением МПТ вызовет снижение значения электрического заряда. Интеграл может продолжать суммирование до тех пор, пока не будет превышено заданное значение электрического заряда, при этом переключающее устройство 112 будет разомкнуто микроконтроллером 210. Дополнительно, интеграл будет продолжать суммирование до тех пор, пока значение электрического заряда не вернется к нулю вследствие того, что сила тока опускается ниже заданного значения МПТ на определенное значение и в течение определенного периода.
Четвертый модуль 278 формирования сигнала может быть соединен с датчиком 123. Четвертый модуль 278 формирования сигнала принимает сигнал (например, значение напряжения), поступающий от датчика 123, который соответствует температуре электродвигателя 108. Четвертый модуль 278 формирования сигнала выдает шестое значение 282 напряжения, которое соответствует температуре электродвигателя 108. Четвертый модуль 278 формирования сигнала может формировать сигнал одним или несколькими способами для генерирования шестого значения 282 напряжения, например, при помощи фильтрации, буферизации, оцифровывания и/или осуществления одного или нескольких других подходящих действий для формирования сигнала.
Микроконтроллер 210 может определять температуру электродвигателя 108 с использованием либо функции, либо алгоритма преобразования, который связывает напряжение с температурой, используя шестое значение 282 напряжения в качестве исходной величины. Микроконтроллер 210 прекращает поступление электрического тока к электродвигателю 108, когда температура электродвигателя 108 превышает заданную температуру. И наоборот, микроконтроллер 210 допускает поступление электрического тока к электродвигателю 108, когда температура электродвигателя 108 меньше заданной температуры.
Кроме того, микроконтроллер 210 может выборочно допускать и прекращать поступление электрического тока к электродвигателю 108 на основании одного или нескольких других параметров. Например, микроконтроллер 210 может отключить поступление электрического тока к электродвигателю 108, когда температура корпуса превышает заданную температуру; когда температура выходного патрубка компрессора превышает заданную температуру; и/или при возникновении одного или нескольких подходящих условий отключения. Микроконтроллер 210 может допускать поступление электрического тока к электродвигателю 108 при отсутствии условий отключения.
Хотя настоящая заявка рассматривается на примере устройств с сопротивлениями, которые передают информацию, касающуюся МПТ, сопротивления встроенных и удаленных устройств могут также быть использованы для установки заданных значений, используемых при разрешении и прекращении поступления электрического тока к электродвигателю 108. Например, сопротивления встроенных и удаленных устройств могут также быть использованы для установки заданной температуры.
Когда микроконтроллер 210 принимает решение о необходимости прекратить поступление электрического тока к электродвигателю 108 посредством размыкания переключающего устройства 112, микроконтроллер может определить время срабатывания. Время срабатывания может представлять собой или соответствовать периоду между временем, когда принято решение об отключении электрического тока, поступающего к электродвигателю 108, и временем, когда микроконтроллер 210 подает команду для размыкания переключающего устройства 112. Микроконтроллер 210 может определить время срабатывания, например, исходя из разницы между электрическим током на электродвигателе 108 и заданным МПТ, скорости изменения указанной разницы и/или одного или нескольких других подходящих параметров. Например, время срабатывания может снижаться при увеличении указанной разницы и/или скорости изменения указанной разницы и наоборот.
Рассмотрим теперь Фиг. 3В, на которой представлена другая функциональная схема другой примерной системы управления током. В микроконтроллер 210 может поступать эталонное напряжение 302 от источника 304 эталонного напряжения (Vэт). Резистор 306 установлен между источником 304 эталонного напряжения и точкой 308 разветвления. Резистор 246 второго устройства 132 ограничения МПТ установлен между точкой 308 разветвления и массой 310, такой как масса 234. Таким образом, значение напряжения в точке 308 разветвления соответствует сопротивлению резистора 236 второго устройства 132 ограничения МПТ.
В микроконтроллер 210 может поступать значение напряжения в точке 308 разветвления. Микроконтроллер определяет сопротивление резистора 246 второго устройства 132 ограничения МПТ на основании соотношения эталонного напряжения 302 и напряжения в точке 308 разветвления. Микроконтроллер 210 определяет второй МПТ на основании сопротивления резистора 246. Микроконтроллер 210 устанавливает заданный МПТ на основании первого и второго МПТ, а также выборочно прекращает поступление электрического тока к электродвигателю 108 на основании заданного МПТ, как рассмотрено выше.
Второе устройство 132 ограничения МПТ может посылать значение, соответствующее второму МПТ, в модуль 130 защиты электродвигателя по проводному соединению (например, как рассмотрено выше в связи с примерами, представленными на Фиг. 3A и 3B). Альтернативно, второе устройство 132 ограничения МПТ может передавать по беспроводному соединению второй МПТ или значение, соответствующее второму МПТ, в модуль 130 защиты электродвигателя.
Рассмотрим теперь Фиг. 3C, на которой представлена функциональная схема другой примерной системы управления током. Например, второе устройство 132 ограничения МПТ может передавать второй МПТ или значение, соответствующее второму МПТ, в модуль 130 защиты электродвигателя при помощи беспроводной связи ближнего радиуса действия, например, радиочастотной идентификации (РЧИД), протокола передачи данных по технологии Bluetooth или другого подходящего типа беспроводной связи.
Модуль 130 защиты электродвигателя может содержать коммуникационный модуль 320 и антенну 324. Антенна 324 принимает передаваемые по беспроводной связи данные от второго устройства 132 ограничения МПТ и передает указанные данные от второго устройства 132 ограничения МПТ в коммуникационный модуль 320. Коммуникационный модуль 320 может посылать один или несколько сигналов, при получении которых второе устройство 132 ограничения МПТ будет генерировать выходной сигнал, передаваемый по различным типам беспроводной связи. Коммуникационный модуль 320 посылает выходной сигнал, который соответствует второму МПТ, в микроконтроллер 210. Микроконтроллер 210 может определить второй МПТ на основании выходного сигнала. Микроконтроллер 210 устанавливает заданный МПТ на основании первого и второго МПТ и выборочно прекращает поступление электрического тока к электродвигателю 108 на основании заданного МПТ, как рассмотрено выше.
Рассмотрим теперь Фиг. 4, на которой представлена блок-схема примерного способа управления поступлением электрического тока к электродвигателю 108. В блоке 404 происходит определение сопротивления первого устройства 202 ограничения МПТ. В блоке 408 происходит определение того, находится ли сопротивление первого устройства 202 ограничения МПТ в пределах заданного диапазона сопротивления. Если нет, то в блоке 412 может быть прекращено поступление электрического тока в электродвигатель 108, после чего способ завершается. Если да, то способ может перейти к блоку 416. Когда сопротивление первого устройства 202 ограничения МПТ выходит за пределы заданного диапазона сопротивления, первое устройство 202 ограничения МПТ может быть закорочено или разомкнуто.
В блоке 416 происходит определение первого МПТ на основании сопротивления первого устройства 202 ограничения МПТ. Способ определяет первый МПТ в зависимости от сопротивления первого устройства 202 ограничения МПТ. Например, первый МПТ может быть определен с использованием либо функции, либо алгоритма преобразования, который связывает сопротивление с МПТ. В блоке 420 происходит определение того, следует ли определять второй МПТ. Если нет, то в блоке 424 может быть установлен заданный МПТ, равный первому МПТ, после чего способ переходит к блоку 440. Блок 440 более подробно рассмотрен ниже. Если да, то способ может перейти к блоку 432.
В блоке 432 происходит определение второго МПТ. Второй МПТ определяют на основании выходного сигнала второго устройства 132 ограничения МПТ. Второй МПТ определяют в зависимости от сопротивления второго устройства 132 ограничения МПТ. Например, второй МПТ может быть определен с использованием либо функции, либо алгоритма преобразования, который связывает сопротивление с МПТ. Определение первого и второго МПТ может быть осуществлено с использованием одинаковых или различных функций и/или алгоритмов преобразования. В блоке 436 заданный МПТ может быть установлен равным меньшему из первого и второго МПТ.
В блоке 440 осуществляют выборочное прекращение поступления электрического тока в электродвигатель 108 на основании заданного МПТ и электрического тока, поступающего в электродвигатель 108. Более конкретно, происходит прекращение поступления электрического тока в электродвигатель 108, когда электрический ток, поступающий в электродвигатель 108, превышает заданный МПТ. Если электрический ток, поступающий в электродвигатель 108, превышает заданный МПТ, то может быть осуществлено определение времени срабатывания. Время срабатывания может представлять собой или соответствовать периоду между временем, когда электрический ток, поступающий к электродвигателю 108, превышает заданный МПТ, и временем, когда поступает команда на размыкание переключающего устройства 112. Время срабатывания может быть определено, например, исходя из разницы между электрическим током, поступающим в электродвигатель 108, и заданным МПТ; скорости изменения указанной разницы; и/или одного или нескольких других подходящих параметров. Например, время срабатывания может снижаться при увеличении указанной разницы и/или скорости изменения указанной разницы и наоборот. Значение электрического тока, поступающего в электродвигатель 108, может быть определено при помощи одного или нескольких датчиков тока, например, датчика 121 и/или датчика 122. Поступление электрического тока в электродвигатель 108 может быть прекращено посредством размыкания переключающего устройства 112.
Идеи настоящего раскрытия могут быть реализованы в различных формах. Следовательно, несмотря на то, что настоящее раскрытие включает конкретные примеры, истинный объем настоящего раскрытия не должен быть ограничен указанными примерами, так как другие модификации будут очевидны для специалиста в данной области техники при изучении фигур, описания и прилагаемой формулы изобретения.
Реферат
Группа изобретений относится к системам и способам управления электродвигателями, а именно к системам и способам ограничения максимального постоянного тока (МПТ). Система содержит: холодильный компрессор, содержащий электродвигатель. Датчик тока, который измеряет электрический ток, поступающий на электродвигатель. Переключающее устройство, выполненное с возможностью замыкания и размыкания, чтобы допускать и прекращать поступление электрического тока к электродвигателю. Устройство ограничения (МПТ), которое характеризуется сопротивлением, соответствующим максимальному постоянному току для электродвигателя. Модуль защиты электродвигателя с возможностью установления соединения с устройством ограничения МПТ, датчиком тока и переключающим устройством. С возможностью определения первого значения МПТ для электродвигателя в зависимости от сопротивления устройства ограничения МПТ. С возможностью выборочного установления заданного МПТ равным первому МПТ и управления переключающим устройством на основании сравнения электрического тока, поступающего к электродвигателю, и заданного МПТ. Также представлен способ ограничения МПТ по данному устройству. Группа изобретений позволяет ограничивать максимальный постоянный ток. 2 н. и 21 з.п. ф-лы, 6 ил.
Формула
холодильный компрессор, содержащий электродвигатель;
датчик тока, который измеряет электрический ток, поступающий на электродвигатель;
переключающее устройство, выполненное с возможностью замыкания и размыкания, чтобы допускать и прекращать поступление электрического тока к электродвигателю соответственно;
устройство ограничения максимального постоянного тока (МПТ), которое характеризуется сопротивлением, соответствующим максимальному постоянному току для электродвигателя;
модуль защиты электродвигателя, выполненный с возможностью установления соединения с устройством ограничения МПТ, датчиком тока и переключающим устройством;
определения первого значения МПТ для электродвигателя в зависимости от сопротивления устройства ограничения МПТ;
выборочного установления заданного МПТ равным первому МПТ; и
управления переключающим устройством на основании сравнения электрического тока, поступающего к электродвигателю, и заданного МПТ.
при этом модуль защиты электродвигателя при управлении переключающим устройством также учитывает второе сравнение температуры электродвигателя и заданной температуры.
при этом модуль защиты электродвигателя выполнен с возможностью определения второго МПТ для электродвигателя в зависимости от второго сопротивления; и
выборочного установления заданного МПТ равным второму МПТ.
измерение электрического тока, поступающего к электродвигателю холодильного компрессора, при помощи датчика тока;
выборочное размыкание и замыкание переключающего устройства, чтобы допускать и прекращать поступление электрического тока к электродвигателю соответственно;
осуществление связи с датчиком тока, переключающим устройством и устройством ограничения максимального постоянного тока (МПТ), при этом устройство ограничения МПТ характеризуется сопротивлением, соответствующим максимальному постоянному току электродвигателя;
определение первого значения МПТ для электродвигателя в зависимости от сопротивления устройства ограничения МПТ;
выборочную установку заданного МПТ равным первому МПТ; и
управление переключающим устройством на основании сравнения электрического тока, поступающего к электродвигателю, и заданного МПТ.
измерение температуры электродвигателя при помощи температурного датчика; и
управление переключающим устройством также на основании второго сравнения температуры электродвигателя и заданной температуры.
определение второго МПТ для электродвигателя в зависимости от второго сопротивления второго устройства ограничения МПТ; и
выборочную установку заданного МПТ равным второму МПТ.
Комментарии