Захватывающий инструмент и способ применения захватывающего инструмента - RU2777075C1
Код документа: RU2777075C1
Чертежи







Описание
Область техники
Изобретение относится к захватывающему инструменту и способу применения этого захватывающего инструмента.
Предшествующий уровень техники
Захватывающие инструменты, которые захватывают захватываемый объект являются известными.
В качестве предшествующего уровня техники патентный документ JP2015165739 (далее – Патентный документ 1) раскрывает инструмент для непрямого активного захвата провода. Инструмент для непрямого активного захвата провода, раскрытый в Патентном документе 1, имеет захватывающий механизм, изолирующий рабочий стержень, ответный элемент и блокирующий механизм. Захватывающий механизм имеет фиксированную захватывающую часть и подвижную захватывающую часть. Изолирующий рабочий стержень имеет корпус рабочего стержня и элемент стороны сердечника вала, расположенный внутри корпуса рабочего стержня. Корпус рабочего штока выполнен с возможностью осевого скольжения относительно элемента стороны сердечника вала.
В инструменте для непрямого активного захвата провода, описанном в Патентном документе 1, в ответ на то, что корпус рабочего стержня скользит к стороне захватывающего механизма, приводится в действие блокирующий механизм. Состояние приведения в действие блокирующего механизма предотвращает вращение изолирующего рабочего стержня, в результате чего подвижная захватывающая часть перемещается в направлении от фиксированной захватывающей части. В ответ на скольжение корпуса рабочего стержня в направлении от захватывающего механизма блокирующий механизм разблокируется. В результате возможно поворачивать изолирующий рабочий стержень так, чтобы подвижная захватывающая часть перемещалась в направлении от фиксированной захватывающей части.
Раскрытие изобретения
Техническая проблема
Задачей изобретения является создание захватывающего инструмента, который можно переключать между заблокированным состоянием и разблокированным состоянием с помощью простой операции, и создание способа применения захватывающего инструмента.
Решение проблемы
Изобретение относится к захватывающему инструменту и способу применения захватывающего инструмента, описанным далее.
(1) Захватывающий инструмент, содержащий:
первый элемент, включающий в себя первую захватывающую часть;
второй элемент, включающий в себя вторую захватывающую часть;
рабочий элемент, способный вызывать перемещение второй захватывающей части относительно первой захватывающей части в направлении, параллельном первому направлению, когда направление от второй захватывающей части к первой захватывающей части определено как первое направление, а направление, противоположное первому направлению, определено как второе направление;
третий элемент, ввинченный в рабочий элемент и навинченный на второй элемент; и
блокирующий механизм, приспособленный для выполнения переключения между заблокированным состоянием для предотвращения перемещения второй захватывающей части относительно первой захватывающей части во втором направлении и разблокированным состоянием для обеспечения перемещения второй захватывающей части относительно первой захватывающей части во втором направлении,
при этом блокирующий механизм включает в себя участок зацепления, выполненный в третьем элементе.
(2) Захватывающий инструмент по п. (1) выше, выполненный так, что вращение рабочего элемента в первом направлении вращения вызывает как перемещение второй захватывающей части в первом направлении, так и переключение из разблокированного состояния в заблокированное состояние.
(3) Захватывающий инструмент по п. (1) или (2) выше, выполненный так, что заблокированное состояние сохраняется до тех пор, пока рабочий элемент не повернется на предварительно заданный угол во втором направлении вращения, и переключение из заблокированного состояния в разблокированное состояние выполняется, когда рабочий элемент вращается на предварительно заданный угол или больше во втором направлении вращения.
(4) Захватывающий инструмент по любому из пп. (1) – (3) выше, в котором третий элемент содержит:
первую поверхность, определяющую верхнее предельное положение рабочего элемента относительно третьего элемента; и
вторую поверхность, определяющую нижнее предельное положение рабочего элемента относительно третьего элемента.
(5) Захватывающий инструмент по любому из пп. (1) – (4) выше, в котором блокирующий механизм включает в себя второй участок зацепления, выполненный в первом элементе.
(6) Захватывающий инструмент по любому из пп. (1) – (5) выше, в котором рабочий элемент содержит прижимающую часть, которая переключает состояние блокирующего механизма из заблокированного состояния в разблокированное состояние.
(7) Захватывающий инструмент по любому из пп. (1) – (6) выше, в котором рабочий элемент содержит крепежную часть, к которой с возможностью отсоединения прикреплен стержень дистанционного управления.
(8) Способ применения захватывающего инструмента, содержащего:
первый элемент, включающий в себя первую захватывающую часть;
второй элемент, включающий в себя вторую захватывающую часть;
рабочий элемент, способный вызывать перемещение второй захватывающей части относительно первой захватывающей части в направлении, параллельном первому направлению, когда направление от второй захватывающей части к первой захватывающей части определено как первое направление, а направление, противоположное первому направлению, определено как второе направление;
третий элемент, ввинченный в рабочий элемент и навинченный на второй элемент; и
блокирующий механизм, приспособленный для выполнения переключения между заблокированным состоянием для предотвращения перемещения второй захватывающей части относительно первой захватывающей части во втором направлении и разблокированным состоянием для обеспечения перемещения второй захватывающей части относительно первой захватывающей части во втором направлении,
причем способ включает в себя:
этап, на котором размещают захватываемый объект между первой захватывающей частью и второй захватывающей частью; и
этап захвата, на котором захватываемый объект захватывают первой захватывающей частью и второй захватывающей частью посредством вращения рабочего элемента в первом направлении вращения,
при этом этап захвата включает в себя:
этап уменьшения расстояния, на котором уменьшают расстояние между первой захватывающей частью и второй захватывающей частью посредством относительного вращения между третьим элементом и вторым элементом, и
первый этап переключения, на котором переключают состояние блокирующего механизма из разблокированного состояния в заблокированное состояние посредством относительного вращения между третьим элементом и рабочим элементом.
(9) Способ применения захватывающего инструмента по п. (8) выше, дополнительно включающий в себя:
этап освобождения захвата, на котором освобождают захват объекта, захваченного первой захватывающей частью и второй захватывающей частью,
при этом этап освобождения захвата включает в себя:
второй этап переключения, на котором переключают состояние блокирующего механизма из заблокированного состояния в разблокированное состояние посредством относительного вращения между третьим элементом и рабочим элементом, и
этап увеличения расстояния, на котором увеличивают расстояние между первой захватывающей частью и второй захватывающей частью посредством относительного вращения между третьим элементом и вторым элементом.
Преимущественный эффект изобретения
Согласно изобретению можно создать захватывающий инструмент, который может переключаться между заблокированным состоянием и разблокированным состоянием с помощью простой операции, и создать способ применения захватывающего инструмента.
Краткое описание чертежей
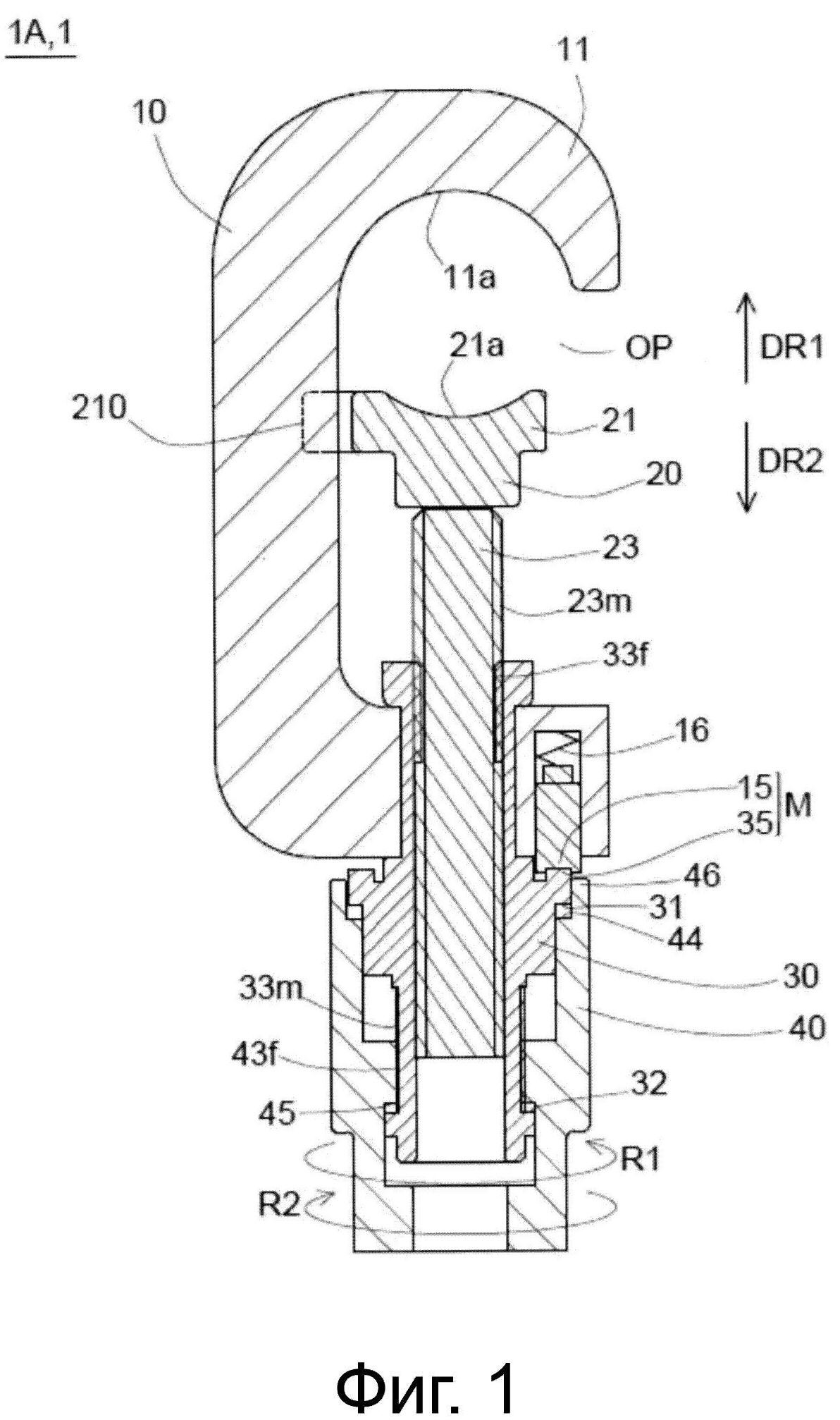
На фиг. 1 схематично показан захватывающий инструмент в первом варианте осуществления изобретения, общий вид в вертикальном разрезе;
на фиг. 2 – захватывающий инструмент в первом варианте осуществления изобретения, общий вид сбоку;
на фиг. 3 – захватывающий инструмент в первом варианте осуществления изобретения, общий вид в вертикальном разрезе;
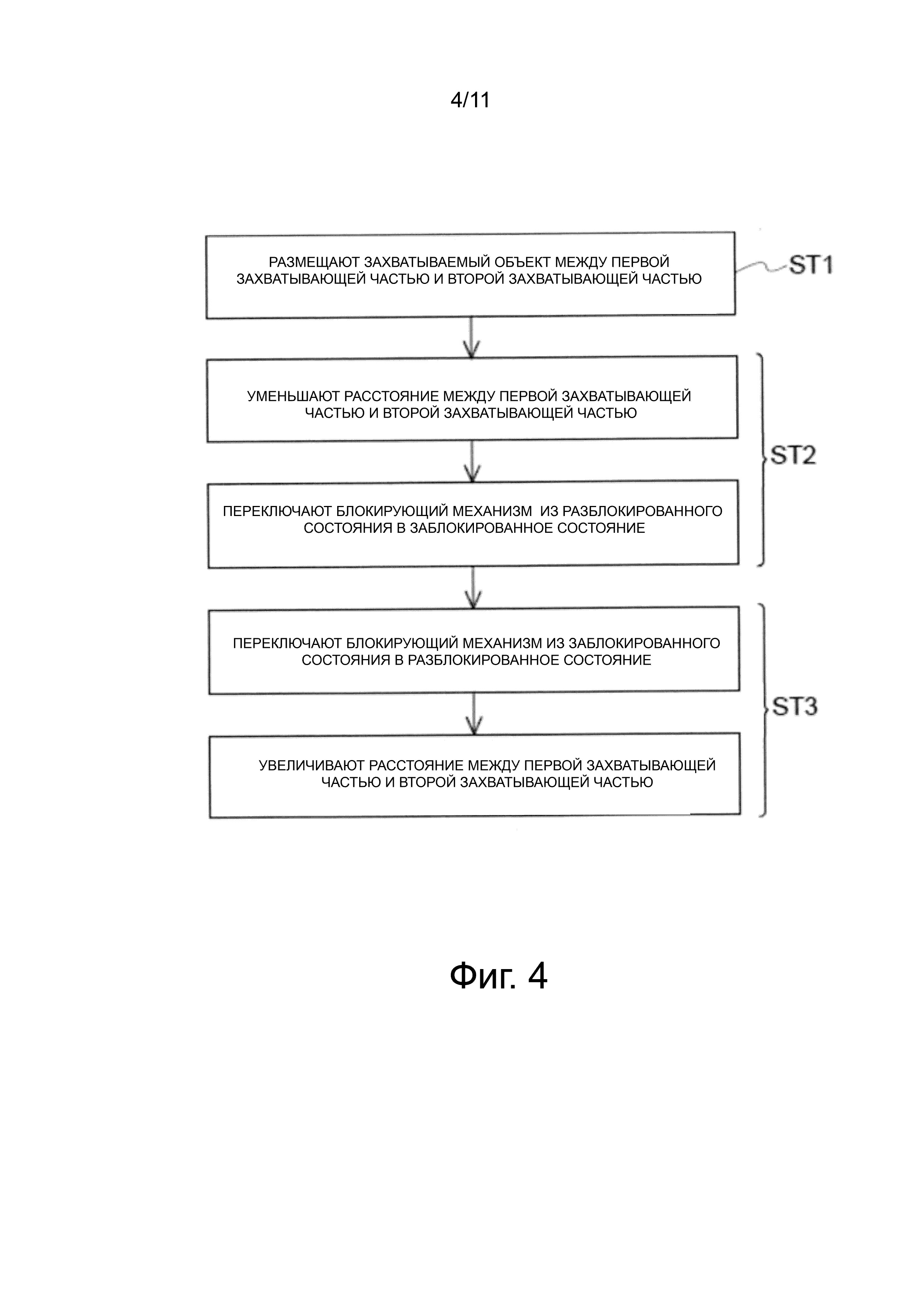
на фиг. 4 показана блок-схема, поясняющая пример способа применения захватывающего инструмента в первом варианте осуществления изобретения;
на фиг. 5 схематично показано состояние, в котором выполняется один этап способа применения захватывающего инструмента, общий вид в вертикальном разрезе;
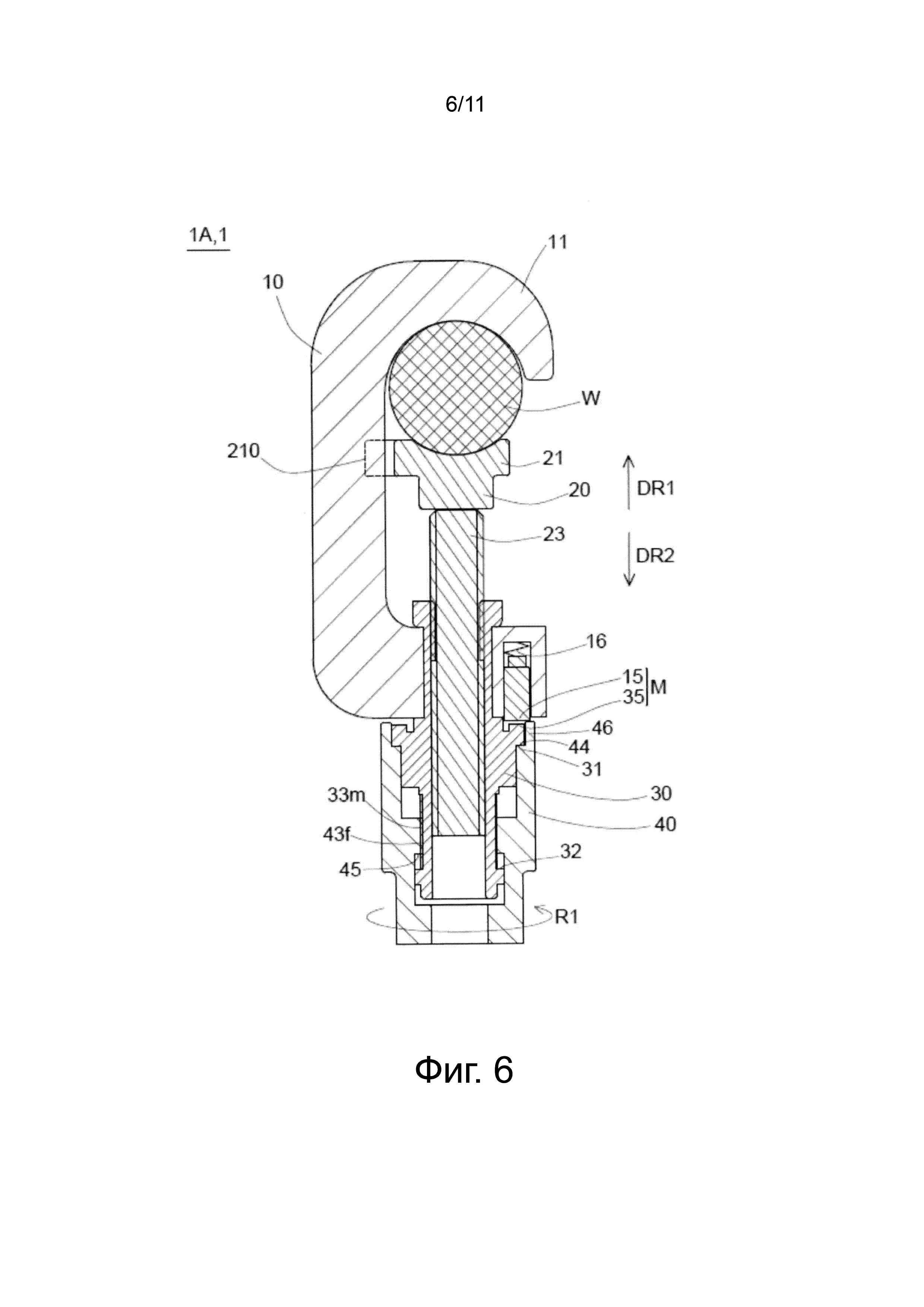
на фиг. 6 – состояние, в котором выполняется один этап способа применения захватывающего инструмента, общий вид в вертикальном разрезе;
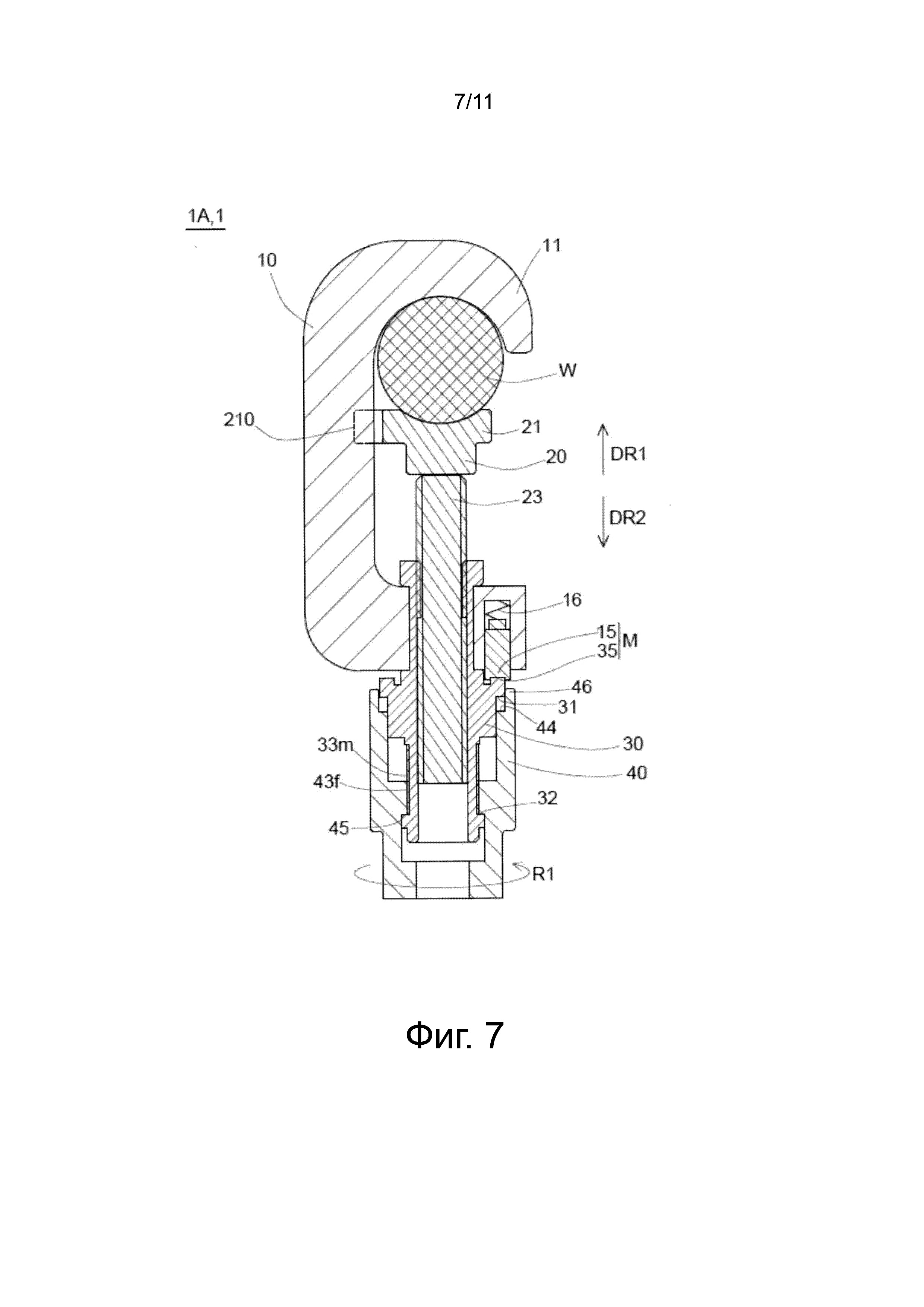
на фиг. 7 – состояние, в котором выполняется один этап способа применения захватывающего инструмента, общий вид в вертикальном разрезе;
на фиг. 8 – состояние, в котором выполняется один этап способа применения захватывающего инструмента, общий вид в вертикальном разрезе;
на фиг. 9 – состояние, в котором выполняется один этап способа применения захватывающего инструмента, общий вид в вертикальном разрезе;
на фиг. 10 – захватывающий инструмент во втором варианте осуществления изобретения, общий вид сзади.
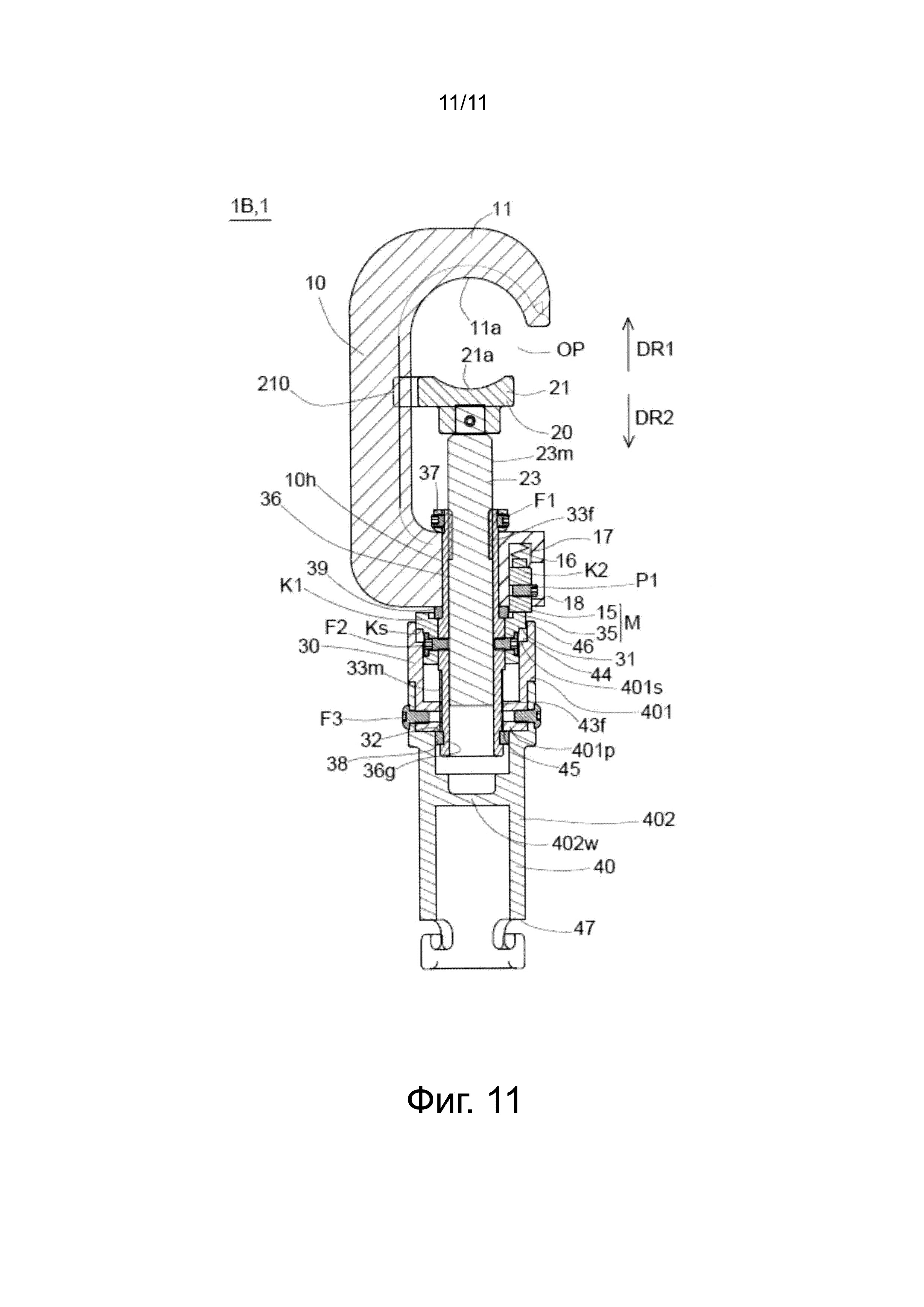
на фиг. 11 – вид в разрезе по плоскости A-A на фиг. 10.
Варианты осуществления изобретения
Инструмент 1 для захвата и способ применения захватывающего инструмента в вариантах осуществления будут подробно описаны далее со ссылками на чертежи. Следует обратить внимание, что в этом описании элементы, имеющие один и тот же тип функций, помечены одинаковыми или подобными ссылочными позициями. Кроме того, для элементов, помеченных одинаковыми или подобными ссылочными позициями, их дублированное описание может быть опущено.
Определение направлений
В этом описании направление от второй захватывающей части 21 (более конкретно, второй захватывающей поверхности 21a) к первой захватывающей части 11 (более конкретно, первой захватывающей поверхности 11a) определяется как первое направление DR1, а направление, противоположное первому направлению DR1 определяется как второе направление DR2.
Первый вариант осуществления изобретения
Захватывающий инструмент 1A в первом варианте осуществления изобретения будет описан со ссылкой на фиг. 1 – фиг. 3. Фиг. 1 и фиг. 3 представляют собой общие виды в вертикальном разрезе, схематично поясняющие захватывающий инструмент 1А в первом варианте осуществления. Фиг. 2 представляет собой общий вид сбоку, схематично поясняющий захватывающий инструмент 1А в первом варианте осуществления.
Захватывающий инструмент 1A имеет первый элемент 10, второй элемент 20, третий элемент 30, рабочий элемент 40 и блокирующий механизм M.
В примере, представленном на фиг. 1, первый элемент 10 включает в себя первую захватывающую часть 11. Кроме того, в примере, представленном на фиг. 1, первый элемент 10 является конструктивным элементом, имеющим проём OP, который принимает захватываемый объект. Хотя первый элемент 10 является элементом, имеющим, по существу, С-образную форму на виде сбоку в примере, представленном на фиг. 1 и фиг. 2, форма первого элемента 10 не ограничивается примером, представленным на фиг. 1 и фиг. 2. Следует обратить внимание, что первый элемент 10 может быть сформирован из одного компонента или может быть сформирован из узла из множества компонентов.
В примере, представленном на фиг. 1, первая захватывающая часть 11 имеет первую захватывающую поверхность 11a, которая входит в контакт с захватываемым объектом. Первая захватывающая поверхность 11а представляет собой, например, изогнутую поверхность.
В примере, представленном на фиг. 1, второй элемент 20 включает в себя вторую захватывающую часть 21. Второй элемент 20 является элементом, который может перемещаться относительно первого элемента 10. В примере, представленном на фиг. 1, второй элемент 20 имеет резьбовой стержень 23 в дополнение ко второй захватывающей части 21. В примере, представленном на фиг. 1, резьбовой стержень 23 имеет часть 23m с внешней резьбой на своей внешней окружной поверхности. В примере, представленном на фиг. 1, второй элемент 20 сформирован из узла, состоящего из компонента, образующего вторую захватывающую часть 21, и компонента, образующего резьбовой стержень 23. В качестве альтернативы, второй элемент 20 может быть сформирован из одного компонента или может быть сформирован из узла из трех или более компонентов.
В примере, представленном на фиг. 1, вторая захватывающая часть 21 имеет вторую захватывающую поверхность 21а, которая входит в контакт с захватываемым объектом. Вторая захватывающая поверхность 21а представляет собой, например, изогнутую поверхность.
Рабочий элемент 40 является элементом, который вызывает перемещение второй захватывающей части 21 относительно первой захватывающей части 11 в направлении, параллельном первому направлению DR1.
Когда рабочий элемент 40 приводится в действие, расстояние между первой захватывающей частью 11 (более конкретно, первой захватывающей поверхностью 11a) и второй захватывающей частью 21 (более конкретно, второй захватывающей поверхностью 21a) изменяется. В примере, представленном на фиг. 1, когда рабочий элемент 40 вращается в первом направлении R1 вращения, вторая захватывающая часть 21 перемещается в направлении к первой захватывающей части 11. С другой стороны, когда рабочий элемент 40 вращается во втором направлении R2 вращения, то есть противоположно первому направлению R1 вращения, вторая захватывающая часть 21 перемещается в направлении от первой захватывающей части 11.
В примере, представленном на фиг. 1, третий элемент 30 ввинчивается в рабочий элемент 40 и навинчивается на второй элемент 20. Более конкретно, третий элемент 30 имеет часть 33m с внешней резьбой, ввинченную в часть 43f с внутренней резьбой рабочего элемента 40. Кроме того, третий элемент 30 имеет часть 33f с внутренней резьбой, навинченную на часть 23m с внешней резьбой второго элемента 20.
В примере, представленном на фиг. 1, третий элемент 30 ввинчивается в рабочий элемент 40 и навинчивается на второй элемент 20. Таким образом, когда рабочий элемент 40 вращается относительно третьего элемента 30, рабочий элемент 40 перемещается относительно третьего элемента 30 в направлении продольной оси третьего элемента 30. С другой стороны, когда рабочий элемент 40 вместе с третьим элементом 30 вращается относительно второго элемента 20, второй элемент 20 перемещается относительно третьего элемента 30 в направлении продольной оси третьего элемента 30.
В примере, представленном на фиг. 1, третий элемент 30 не может перемещаться относительно первого элемента 10 в направлении, параллельном первому направлению DR1. Таким образом, если смотреть со стороны третьего элемента 30 в качестве точки отсчета, когда рабочий элемент 40 вращается относительно третьего элемента 30, это означает, что рабочий элемент 40 перемещается в направлении, параллельном первому направлению DR1. Кроме того, если смотреть со стороны третьего элемента 30 в качестве точки отсчета, когда рабочий элемент 40 вместе с третьим элементом 30 вращается относительно второго элемента 20, это означает, что второй элемент 20 перемещается в направлении, параллельном первому направлению DR1.
Блокирующий механизм M представляет собой механизм, который выполняет переключение между заблокированным состоянием, чтобы предотвратить перемещение второй захватывающей части 21 относительно первой захватывающей части 11 во втором направлении DR2, и разблокированным состоянием, чтобы позволить второй захватывающей части 21 перемещаться относительно первой захватывающей части 11 во втором направлении DR2. Следует обратить внимание, что заблокированное состояние, по существу, означает состояние, в котором невозможно увеличить расстояние между первой захватывающей частью 11 и второй захватывающей частью 21. Таким образом, когда блокирующий механизм M находится в заблокированном состоянии, захваченный объект не выпадает из захватывающего инструмента 1А. С другой стороны, разблокированное состояние означает состояние, в котором возможно увеличить расстояние между первой захватывающей частью 11 и второй захватывающей частью 21.
Блокирующий механизм M включает в себя участок 35 зацепления, выполненный в третьем элементе 30, описанном выше. Когда участок 35 зацепления входит в зацепление с элементом, отличным от третьего элемента 30 (например, вторым участком 15 зацепления), блокирующий механизм M переходит в заблокированное состояние. Следует обратить внимание, что в заблокированном состоянии, хотя перемещение второй захватывающей части 21 относительно первой захватывающей части 11 во втором направлении DR2 предотвращается, второй части 21 для захвата может быть разрешено перемещение относительно первой захватывающей части 11 в первом направлении DR1. В качестве альтернативы, в заблокированном состоянии, в дополнение к тому, что перемещение второй захватывающей части 21 относительно первой захватывающей части 11 во втором направлении DR2 предотвращается, также может предотвращаться перемещение второй захватывающей части 21 относительно первой захватывающей части 11 в первом направлении DR1.
В примере, представленном на фиг. 1, рабочий элемент 40 перемещается относительно третьего элемента 30 в направлении продольной оси третьего элемента 30 (другими словами, в направлении, параллельном первому направлению DR1), и, таким образом, выполняется переключение между заблокированным состоянием и разблокированным состоянием. Подробности этого будут описаны позже. Кроме того, в примере, представленном на фиг. 1, второй элемент 20 перемещается относительно третьего элемента 30 в направлении продольной оси третьего элемента 30 (другими словами, в направлении, параллельном первому направлению DR1), и, таким образом, расстояние между первой захватывающей частью 11 и второй захватывающей частью 21 изменяется.
В захватывающем инструменте 1A первого варианта осуществления изобретения третий элемент 30 ввинчивается в рабочий элемент 40 и навинчивается на второй элемент 20. Таким образом, только с помощью вращения рабочего элемента 40, можно выполнять переключение между заблокированным состоянием и разблокированным состоянием, описанным выше, и также возможно изменять расстояние между первой захватывающей частью 11 и второй захватывающей частью 21. Таким образом, в захватывающем инструменте 1A первого варианта осуществления заблокированное состояние и разблокированное состояние могут быть переключены с помощью простой операции.
Предполагается, что после размещения захватываемого объекта между первой захватывающей частью 11 и второй захватывающей частью 21 рабочий элемент 40 вращается в первом направлении R1 вращения. Когда рабочий элемент 40 вращается в первом направлении R1 вращения, рабочий элемент 40 вращается вместе с третьим элементом 30 в первом направлении R1 вращения. В результате второй элемент 20, ввинченный в третий элемент 30, перемещается в первом направлении DR1. Таким образом, захватываемый объект захватывается первой захватывающей частью 11 и второй захватывающей частью 21.
Предполагается, что после того, как захватываемый объект захватывается первой захватывающей частью 11 и второй захватывающей частью 21, рабочий элемент 40 дополнительно вращается в первом направлении R1 вращения. В таком случае, поскольку перемещение второго элемента 20 ограничено, рабочий элемент 40 вращается относительно третьего элемента 30 вместо того, чтобы второй элемент 20 вращался относительно третьего элемента 30. Другими словами, после того, как захватываемый объект захватывается первой захватывающей частью 11 и второй захватывающей частью 21, когда рабочий элемент 40 дополнительно вращается в первом направлении R1 вращения, рабочий элемент 40 вращается относительно третьего элемента 30 и перемещается во втором направлении DR2 . В результате, как представлено на фиг. 1 в качестве примера, прижимающая часть 46, выполненная в рабочем элементе 40, перемещается в обратное положение, и блокирующий механизм M переходит в заблокированное состояние (состояние, в котором участок 35 зацепления вводится в зацепление с другим элементом, таким как второй участок 15 зацепления), из разблокированного состояния.
Как описано выше, пример, представленный на фиг. 1 приспособлен так, что рабочий элемент 40 вращается в первом направлении R1 вращения, и, таким образом, выполняется как перемещение второй захватывающей части 21 в первом направлении DR1, так и переключение из разблокированного состояния в заблокированное состояние. Таким образом, только вращая рабочий элемент 40 в первом направлении R1 вращения, можно выполнить захват захватываемого объекта и переключение в заблокированное состояние.
Далее предполагается, что после того, как захватываемый объект захватывается первой захватывающей частью 11 и второй захватывающей частью 21, рабочий элемент 40 вращается во втором направлении R2 вращения. Следует обратить внимание, что второе направление R2 вращения является направлением, противоположным первому направлению R1 вращения.
Когда рабочий элемент 40 вращается во втором направлении R2 вращения, рабочий элемент 40 вращается относительно третьего элемента 30 и перемещается в первом направлении DR1. В результате, как представлено на фиг. 3 в качестве примера, прижимающая часть 46, имеющаяся в рабочем элементе 40, перемещается в переднее положение, и блокирующий механизм M переходит в разблокированное состояние (состояние, в котором зацепление между участком 35 зацепления и другим элементом, таким как второй участок 15 зацепления, освобождается) из заблокированного состояния.
Следует обратить внимание на то, что в примере, представленном на фиг. 3, заблокированное состояние сохраняется до тех пор, пока рабочий элемент 40 не повернется во втором направлении R2 вращения на предварительно заданный угол (например, заданный угол представляет собой любой угол от 360 градусов до 1080 градусов). Затем, когда рабочий элемент 40 вращается во втором направлении R2 вращения на заданный угол или больше, выполняется переключение из заблокированного состояния в разблокированное состояние. В таком случае, даже когда оператор неправильно поворачивает рабочий элемент 40 во втором направлении R2 вращения, это не вызывает немедленной разблокировки. Таким образом обеспечивается безопасность оператора и/или человека, находящегося в окружении оператора.
Предполагается, что после того, как блокирующий механизм M переходит в разблокированное состояние из заблокированного состояния, рабочий элемент 40 дополнительно вращается во втором направлении R2 вращения. Когда рабочий элемент 40 вращается во втором направлении R2 вращения, рабочий элемент 40 вращается вместе с третьим элементом 30 во втором направлении R2 вращения. В результате второй элемент 20, ввинченный в третий элемент 30, перемещается во втором направлении DR2. Таким образом, освобождается захват объекта, захваченного первой захватывающей частью 11 и второй захватывающей частью 21.
Как описано выше, в примере, представленном на фиг. 3, рабочий элемент 40 повернут на заданный угол или больше во втором направлении R2 вращения, как для переключения из заблокированного состояния в разблокированное состояние, так и для освобождения захвата объекта, захваченного первой захватывающей частью 11 и второй захватывающей частью 21. Следовательно, только вращая рабочий элемент 40 во втором направлении R2 вращения, можно выполнять переключение в разблокированное состояние и освобождение от захвата захваченного объекта.
Пример второго элемента 20, третьего элемента 30 и рабочего элемента 40
Пример второго элемента 20, третьего элемента 30 и рабочего элемента 40 будет описан более подробно со ссылкой на фиг. 1.
Второй элемент 20 имеет резьбовой стержень 23. Следует обратить внимание, что в описании «резьбовой стержень» означает элемент, имеющий стержнеобразный участок, имеющий резьбовую часть, сформированную на внутренней окружной поверхности или внешней окружной поверхности. Другими словами, стержневой стержень может представлять собой стержень с внешней резьбой, имеющий участок с внешней резьбой, сформированный на внешней окружной поверхности, или стержень с внутренней резьбой, имеющий часть с внутренней резьбой, сформированную на внутренней окружной поверхности.
В примере, представленном на фиг. 1, второй элемент 20 имеет стопор 210 вращения, который предотвращает вращение второго элемента 20 относительно первого элемента 10. Таким образом, когда третий элемент 30 вращается относительно первого элемента 10, предотвращается вращение второго элемента 20 относительно первого элемента 10.
Третий элемент 30 имеет первую резьбовую часть (33f), навинченную на второй элемент 20 (более конкретно, резьбовой стержень 23). Таким образом, когда третий элемент 30 вращается относительно второго элемента 20 в первом направлении R1 вращения, вторая захватывающая часть 21 второго элемента 20 перемещается в направлении к первой захватывающей части 11 (другими словами, в первом направлении DR1). Кроме того, когда третий элемент 30 вращается относительно второго элемента 20 во втором направлении R2 вращения, вторая захватывающая часть 21 второго элемента 20 перемещается в направлении от первой захватывающей части 11 (другими словами, во втором направлении DR2). Следует обратить внимание, что в примере, представленном на фиг. 1, первая резьбовая часть (33f) представляет собой часть с внутренней резьбой. В качестве альтернативы, первая резьбовая часть может быть частью с внешней резьбой.
Третий элемент 30 имеет вторую резьбовую часть (33m), ввинченную в рабочий элемент 40. Таким образом, когда рабочий элемент 40 вращается относительно третьего элемента 30 в первом направлении R1 вращения, рабочий элемент 40 перемещается в направлении от первой захватывающей части 11 (другими словами, во втором направлении DR2). Кроме того, когда рабочий элемент 40 вращается относительно третьего элемента 30 во втором направлении R2 вращения, рабочий элемент 40 перемещается в направлении к первой захватывающей части 11 (другими словами, в первом направлении DR1). Следует обратить внимание, что в примере, представленном на фиг. 1, вторая резьбовая часть (33m) представляет собой часть с внешней резьбой. В качестве альтернативы, вторая резьбовая часть может быть частью с внутренней резьбой. Следует обратить внимание на то, что предпочтительно, чтобы вторая резьбовая часть (33m) третьего элемента 30 имела резьбу в том же направлении, что и первая резьбовая часть (33f) третьего элемента 30. Другими словами, когда первая резьбовая часть (33f) третьего элемента 30 имеет левую резьбу, предпочтительно, чтобы вторая резьбовая часть (33m) третьего элемента 30 также была левой резьбой, а когда первая резьбовая часть (33f) третьего элемента 30 имеет правую резьбу, предпочтительно, чтобы вторая резьбовая часть (33m) третьего элемента 30 также имела правую резьбу. Когда первая резьбовая часть (33f) третьего элемента 30 и вторая резьбовая часть (33m) третьего элемента 30 имеют левую резьбу, вращение рабочего элемента 40 в первом направлении R1 вращения вызывает перемещение второго элемента 20 в первом направлении DR1. Напротив, когда первая резьбовая часть (33f) третьего элемента 30 и вторая резьбовая часть (33m) третьего элемента 30 имеют правую резьбу, вращение рабочего элемента 40 в первом направлении R1 вращения вызывает перемещение второго элемента 20 во втором направлении DR2.
Следует обратить внимание на то, что, хотя сила трения между резьбовой частью (43f) рабочего элемента 40 и второй резьбовой частью (33m) третьего элемента 30 больше, чем сила трения между первой резьбовой частью (33f) третьего элемента 30, и резьбовой частью (23m) второго элемента 20, когда рабочий элемент 40 приводится в действие в примере, показанном на фиг. 1, альтернативно, сила трения в первом случае может быть меньше, чем сила трения во втором случае. Хотя подробности будут описаны позже, в примере, представленном на фиг. 1, когда рабочий элемент 40 приводится в действие в первом направлении R1 вращения, резьбовой стержень 23 перемещается вперед в направлении к захватываемому объекту W вследствие относительного перемещения между первой резьбовой частью (33f) третьего элемента 30 и резьбовой частью (23m) второго элемента 20 (который имеет меньшую силу трения) до тех пор, пока вторая захватывающая часть 21 не войдет в контакт с захватываемым объектом W. После того, как вторая захватывающая часть 21 войдет в контакт с захватываемым объектом W, когда рабочий элемент 40 дополнительно приводится в действие в первом направлении R1 вращения, рабочий элемент 40 перемещается в направлении от захватываемого объекта W вследствие относительного перемещения между резьбовой частью (43f) рабочего элемента 40 и второй резьбовой частью (33m) третьего элемента 30 (который имеет большую силу трения). После того, как рабочий элемент 40 входит в контакт со второй поверхностью 32 третьего элемента 30, когда рабочий элемент 40 далее приводится в действие в первом направлении R1 вращения, резьбовой стержень 23 снова перемещается вперед в направлении к захватываемому объекту W. В результате захватываемый объект W прочно захватывается второй захватывающей частью 21 и первой захватывающей частью 11 вследствие прижимающей силы, в соответствии с силой, с помощью которой рабочий элемент 40 закручивается.
В примере, представленном на фиг. 1, третий элемент 30 прикреплен к первому элементу 10 с возможностью вращения относительно первого элемента 10 вокруг центральной оси третьего элемента 30. Кроме того, третий элемент 30 прикреплен к первому элементу 10 так, чтобы он был неподвижным относительно первого элемента 10 в направлении, параллельном первому направлению DR1.
В примере, представленном на фиг. 1, третий элемент 30 имеет участок 35 зацепления, описанный выше. В примере, представленном на фиг. 2, участок 35 зацепления включает в себя множество расположенных по кольцу зубьев 35a (более конкретно, храповых зубьев).
В примере, представленном на фиг. 1, третий элемент 30 имеет первую поверхность 31, которая определяет верхнее предельное положение рабочего элемента 40 относительно третьего элемента 30, и вторую поверхность 32, которая определяет нижнее предельное положение рабочего элемента 40 относительно третьего элемента 30. В таком случае рабочий элемент 40 может перемещаться по вертикали относительно третьего элемента 30 в пределах диапазона между верхним предельным положением, определяемым первой поверхностью 31, и нижним предельным положением, определяемым второй поверхностью 32. Следует обратить внимание на то, что в примере, представленном на фиг. 1, направление от второй захватывающей части 21 (более конкретно, второй захватывающей поверхности 21a) к первой захватывающей части 11 (более конкретно, первой захватывающей поверхности 11a) рассматривается как направление вверх. В качестве альтернативы, направление от первой захватывающей части 11 (более конкретно, первой захватывающей поверхности 11a) ко второй захватывающей части 21 (более конкретно, второй захватывающей поверхности 21a) может рассматриваться как направление вверх.
В примере, представленном на фиг. 1, третий элемент 30 представляет собой цилиндрический элемент, расположенный снаружи второго элемента 20. Хотя третий элемент 30 является цилиндрическим элементом, оба конца которого открыты в примере, представленном на фиг. 1, третий элемент 30 может быть цилиндрическим элементом с дном, один конец которого закрыт. Следует обратить внимание на то, что форма третьего элемента 30 не ограничивается цилиндрической формой. Кроме того, третий элемент 30 может быть сформирован из одного компонента или может быть сформирован из узла, состоящего из множества компонентов.
Рабочий элемент 40 имеет резьбовую часть (43f), навинченную на третий элемент 30. Хотя резьбовая часть (43f) является частью с внутренней резьбой в примере, показанном на фиг. 1, резьбовая часть (43f) может быть частью с внешней резьбой.
В примере, представленном на фиг. 1, рабочий элемент 40 имеет третью поверхность 44, которая может контактировать с первой поверхностью 31, описанной выше. Положение, в котором третья поверхность 44 входит в контакт с первой поверхностью 31, является верхним предельным положением рабочего элемента 40. Кроме того, рабочий элемент 40 имеет четвертую поверхность 45, которая может контактировать со второй поверхностью 32, описанной выше. Положение, в котором четвертая поверхность 45 входит в контакт со второй поверхностью 32, является нижним предельным положением рабочего элемента 40.
В примере, представленном на фиг. 1, рабочий элемент 40 имеет прижимающую часть 46, которая переключает состояние блокирующего механизма M из заблокированного состояния в разблокированное состояние. В примере, представленном на фиг. 1, прижимающая часть 46 выполнена до конца на стороне первого направления DR1 рабочего элемента 40. Прижимающая часть 46 представляет собой, например, кольцевой выступ.
В примере, представленном на фиг. 1, рабочий элемент 40 представляет собой цилиндрический элемент, расположенный снаружи третьего элемента 30. В примере, представленном на фиг. 1, рабочий элемент 40 представляет собой цилиндрический элемент, оба конца которого открыты. Следует обратить внимание на то, что форма рабочего элемента 40 не ограничивается цилиндрической формой. Кроме того, рабочий элемент 40 может быть сформирован из одного компонента или может быть сформирован из узла из множества компонентов.
В примере, представленном на фиг. 1, когда рабочий элемент 40 вращается в первом направлении R1 вращения, рабочий элемент 40 вращается относительно третьего элемента 30 в первом направлении R1 вращения, или в противном случае рабочий элемент 40 вместе с третьим элементом 30 вращается относительно второго элемент 20 в первом направлении R1 вращения. Когда рабочий элемент 40 вращается относительно третьего элемента 30 в первом направлении R1 вращения, рабочий элемент 40 перемещается во втором направлении DR2 относительно третьего элемента 30 в качестве точки отсчета. С другой стороны, когда рабочий элемент 40 вместе с третьим элементом 30 вращается относительно второго элемента 20 в первом направлении R1 вращения, второй элемент 20 перемещается в первом направлении DR1 в качестве точки отсчета для третьего элемента 30 как точки отсчета.
Кроме того, в примере, представленном на фиг. 1, когда рабочий элемент 40 вращается во втором направлении R2 вращения, рабочий элемент 40 вращается относительно третьего элемента 30 во втором направлении R2 вращения, или в противном случае рабочий элемент 40 вместе с третьим элементом 30 вращается относительно второго элемента 20 во втором направлении R2 вращения. Когда рабочий элемент 40 вращается относительно третьего элемента 30 во втором направлении R2 вращения, рабочий элемент 40 перемещается в первом направлении DR1 относительно третьего элемента 30 в качестве точки отсчета. С другой стороны, когда рабочий элемент 40 вместе с третьим элементом 30 вращается относительно второго элемента 20 во втором направлении R2 вращения, второй элемент 20 перемещается во втором направлении DR2 относительно третьего элемента 30 в качестве точки отсчета.
Как представлено на фиг. 3, предполагается, что, когда рабочий элемент 40 находится в относительном верхнем предельном положении по отношению к третьему элементу 30, рабочий элемент 40 вращается в первом направлении R1 вращения. В таком случае крутящий момент, который вращает рабочий элемент 40, передается на третий элемент 30, и третий элемент 30 вращается вместе с рабочим элементом 40 в первом направлении R1 вращения. Кроме того, когда третий элемент 30 вращается в первом направлении R1 вращения, второй элемент 20, имеющий вторую захватывающую часть 21, перемещается в первом направлении DR1. Следовательно, в примере, показанном на фиг. 3, с помощью вращения рабочего элемента 40 в первом направлении R1 вращения, можно перемещать вторую захватывающую часть 21 в первом направлении DR1.
Следует обратить внимание на то, что передача крутящего момента, который вращает рабочий элемент 40, на третий элемент 30 может выполняться с использованием трения между рабочим элементом 40 и третьим элементом 30, или может выполняться с использованием зацепления между рабочим элементом 40 и третьим элементом 30. В примере, представленном на фиг. 3, передача крутящего момента, который вращает рабочий элемент 40, на третий элемент 30 выполняется с использованием трения между третьей поверхностью 44 рабочего элемента 40 и первой поверхностью 31 третьего элемента 30.
Как представлено на фиг. 1, предполагается, что, когда рабочий элемент 40 находится в положении между относительным верхним предельным положением по отношению к третьему элементу 30 и относительным нижним предельным положением по отношению к третьему элементу 30, рабочий элемент 40 вращается в первом направлении R1 вращения. В таком случае рабочий элемент 40 вращается относительно третьего элемента 30 в первом направлении R1 вращения. При вращении относительно третьего элемента 30 в первом направлении R1 вращения рабочий элемент 40 перемещается относительно третьего элемента 30 во втором направлении DR2. Это перемещение вызывает переключение блокирующего механизма M из разблокированного состояния в заблокированное состояние.
Пример блокирующего механизма M
Пример блокирующего механизма M будет описан со ссылкой на фиг. 2.
В примере, представленном на фиг. 2, блокирующий механизм M включает в себя участок 35 зацепления, имеющийся в третьем элементе 30, и второй участок 15 зацепления, имеющийся в первом элементе 10. В примере, представленном на фиг. 2, участок 35 зацепления включает в себя множество кольцевых зубьев 35а, а второй участок 15 зацепления включает в себя выступ 15а (более конкретно, участок в виде крючка), который может входить в зацепление с любым из множества зубьев 35а. В примере, представленном на фиг. 2, участок 35 зацепления имеет множество зубьев 35a, а второй участок 15 зацепления имеет по меньшей мере один выступ 15a. В качестве альтернативы, участок 35 зацепления может иметь по меньшей мере один выступ, а второй участок 15 зацепления может иметь множество зубьев. Еще в качестве альтернативы, каждый участок из числа участка 35 зацепления и второго участка 15 зацепления может иметь множество зубьев.
В примере, представленном на фиг. 2, в состоянии, когда участок 35 зацепления и второй участок 15 зацепления находятся в зацеплении, третий элемент 30 не может вращаться относительно первого элемента 10 во втором направлении R2 вращения. Кроме того, поскольку третий элемент 30 не может вращаться во втором направлении R2 вращения, второй элемент 20, имеющий вторую захватывающую часть 21, также не может перемещаться во втором направлении DR2. Как изложено в данном описании, когда участок 35 зацепления и второй участок 15 зацепления находятся в зацеплении (другими словами, когда блокирующий механизм M находится в заблокированном состоянии), третий элемент 30 не может ни вращаться во втором направлении R2 вращения, ни вызывать перемещение второй захватывающей части 21 в направлении освобождения захвата захваченного объекта (другими словами, во втором направлении DR2).
С другой стороны, в примере, представленном на фиг. 2, в состоянии, когда участок 35 зацепления и второй участок 15 зацепления находятся в зацеплении, третий элемент 30 может вращаться относительно первого элемента 10 в первом направлении R1 вращения. Когда третий элемент 30 вращается относительно первого элемента 10 в первом направлении R1 вращения, второй участок 15 зацепления выходит за пределы по меньшей мере одного зуба 35a участка 35 зацепления. После перемещения за пределы по меньшей мере одного зуба 35a участка 35 зацепления, второй участок 15 зацепления будет зацепляться с другим зубом участка 35 зацепления. В качестве альтернативы, конструкция формы участка 35 зацепления и/или второго участка 15 зацепления может быть изменена так, что третий элемент 30 не сможет вращаться относительно первого элемента 10 в обоих направлениях из числа первого направления R1 вращения и второго направления R2 вращения в состоянии, в котором участок 35 зацепления и второй участок 15 зацепления находятся в зацеплении.
В примере, представленном на фиг. 3, блокирующий механизм M имеет толкающий элемент 16, который толкает второй участок 15 зацепления (более конкретно, элемент K2 зацепления, имеющий второй участок 15 зацепления) в направлении участка 35 зацепления. Таким образом, в состоянии, в котором прижимающая часть 46 рабочего элемента 40 не нажимает на второй участок 15 зацепления (более конкретно, на элемент K2 зацепления, имеющий второй участок 15 зацепления), блокирующий механизм M автоматически находится в заблокированном состоянии (другими словами, в состоянии, в котором участок 35 зацепления и второй участок 15 зацепления находятся в зацеплении). С другой стороны, в ответ на то, что прижимающая часть 46 прижимает второй участок 15 зацепления против толкающей силы толкающего элемента 16, состояние блокирующего механизма M переключается из заблокированного состояния в разблокированное состояние.
Способ применения захватывающего инструмента
Пример способа применения захватывающего инструмента в первом варианте осуществления изобретения будет описан со ссылкой на фиг. 4 – 9. На фиг. 4 показана блок-схема, поясняющая пример способа применения захватывающего инструмента в первом варианте осуществления. На фиг. 5 – 9 – общие виды в вертикальном разрезе, каждый из которых схематично поясняет состояние, в котором выполняется один этап способа применения захватывающего инструмента.
Как представлено на фиг. 5, на первом этапе ST1 захватываемый объект W размещают между первой захватывающей частью 11 и второй захватывающей частью 21. Первый этап ST1 осуществляют путем перемещения захватываемого объекта W в пространство между первой захватывающей частью 11 и второй захватывающей частью 21, например, через проём OP. Захватываемый объект W представляет собой проводной материал, такой как электрический провод, или инструмент, такой как, например, зажим для провода. Следует обратить внимание на то, что захватываемый объект не ограничивается проводными материалами или инструментами.
На втором этапе ST2 захватываемый объект W захватывают первой захватывающей частью 11 и второй захватывающей частью 21. Второй этап ST2 представляет собой этап захвата, на котором осуществляют захват захватываемого объекта. Второй этап ST2 (этап захвата) осуществляют путем вращения рабочего элемента 40 в первом направлении R1 вращения.
Второй этап ST2 (этап захвата) включает в себя этап уменьшения расстояния для уменьшения расстояния между первой захватывающей частью 11 и второй захватывающей частью 21 посредством относительного вращения между третьим элементом 30 и вторым элементом 20 и первый этап переключения блокирующего механизма M из разблокированного состояния в заблокированное состояние посредством относительного вращения между третьим элементом 30 и рабочим элементом 40.
На этапе уменьшения расстояния второй элемент 20, ввинченный в третий элемент 30, перемещается в первом направлении DR1 с помощью относительного вращения между третьим элементом 30 и вторым элементом 20. Таким образом, обеспечивается уменьшение расстояния между второй захватывающей частью 21 в направлении ко второму элементу 20 и первой захватывающей частью 11. Следует отметить, что на этапе уменьшения расстояния крутящий момент, который вращает рабочий элемент 40, передается на третий элемент 30, и третий элемент 30 вращается вместе с рабочим элементом 40 в первом направлении R1 вращения. Крутящий момент передается в состоянии, когда положение рабочего элемента 40 находится в относительном верхнем предельном положении по отношению к третьему элементу 30. Более конкретно, крутящий момент, описанный выше, передается от рабочего элемента 40 к третьему элементу 30 посредством контакта между первой поверхностью 31 третьего элемента 30 и третьей поверхностью 44 рабочего элемента 40.
Вследствие того, что осуществляют этап уменьшения расстояния, захватываемый объект W захватывается первой захватывающей частью 11 и второй захватывающей частью 21 (см. фиг. 6). Как только захватываемый объект W захватывается первой захватывающей частью 11 и второй захватывающей частью 21, второй элемент 20, включая вторую захватывающую часть 21, по существу, не может перемещаться относительно первой захватывающей части 11. В результате третий элемент 30 больше не может вращаться в первом направлении R1 вращения. Поскольку третий элемент 30 больше не может вращаться, крутящий момент, который вращает рабочий элемент 40, не передается на третий элемент 30, и рабочий элемент 40 вращается относительно третьего элемента 30.
После выполнения этапа уменьшения расстояния, рабочий элемент 40 дополнительно вращают в первом направлении R1 вращения, и, таким образом, выполняют первый этап переключения. На первом этапе переключения относительное вращение между третьим элементом 30 и рабочим элементом 40 вызывает перемещение рабочего элемента 40 во втором направлении DR2 (более конкретно, направлении из переднего положения (см. фиг. 6) в заднее положение (см. фиг. 7)). Перемещение рабочего элемента 40 во втором направлении DR2 заставляет прижимающую часть 46 рабочего элемента 40 располагаться с разнесением от второго участка 15 зацепления, расположенного в первом элементе 10. В ответ на разнесение прижимающей части 46 со вторым участком 15 зацепления, второй участок 15 зацепления, толкаемый посредством толкающего элемента 16 в направлении к участку 35 зацепления, входит в зацепление с участком 35 зацепления. Таким образом, блокирующий механизм M переключается из разблокированного состояния в заблокированное состояние.
Следует отметить, что на первом этапе переключения предпочтительно, чтобы относительное положение рабочего элемента 40 по отношению к третьему элементу 30 перемещалось из относительного верхнего предельного положения в относительное нижнее предельное положение. При перемещении положения рабочего элемента 40 из относительного верхнего предельного положения в относительное нижнее предельное положение блокирующий механизм M надежно переключается из разблокированного состояния в заблокированное состояние.
В способе применения захватывающего инструмента в первом варианте осуществления изобретения, с вращением только рабочего элемента 40 в первом направлении R1 вращения, этап уменьшения расстояния, заключающийся в уменьшении расстояния между первой захватывающей частью 11 и второй захватывающей частью 21, и первый этап переключения, заключающийся в переключении блокирующего механизма M из разблокированного состояния в заблокированное состояние, выполняют непрерывно. Следовательно, в первом варианте осуществления создается способ применения захватывающего инструмента, который можно переключать между заблокированным состоянием и разблокированным состоянием с помощью простой операции.
Следует отметить, что этап захвата (второй этап ST2) может включать в себя второй этап уменьшения расстояния в дополнение к этапу уменьшения расстояния, описанному выше, и первому этапу переключения, описанному выше. Второй этап уменьшения расстояния является этапом дальнейшего уменьшения расстояния между первой захватывающей частью 11 и второй захватывающей частью 21. Второй этап уменьшения расстояния можно назвать этапом повторного затягивания. Второй этап уменьшения расстояния осуществляют путем дальнейшего вращения рабочего элемента 40 в первом направлении R1 вращения после осуществления первого этапа переключения, другими словами, после того, как относительное положение рабочего элемента 40 по отношению к третьему элементу 30 переместится в относительное нижнее предельное положение.
Во время выполнения второго этапа уменьшения расстояния рабочий элемент 40 находится в относительном нижнем предельном положении. Таким образом, рабочий элемент 40 не может вращаться относительно третьего элемента 30 в первом направлении R1 вращения. В таком случае, когда рабочий элемент 40 вращается в первом направлении R1 вращения, рабочий элемент 40 и третий элемент 30 вращаются относительно второго элемента 20 в первом направлении R1 вращения таким же образом, как и на этапе уменьшения расстояния, описанном выше.
Когда третий элемент 30 вращается относительно второго элемента 20 в первом направлении R1 вращения, участок 35 зацепления третьего элемента 30 перемещается за пределы второго участка 15 зацепления. В результате, второй элемент 20 перемещается в первом направлении DR1, в направлении продольной оси третьего элемента 30. Таким образом, расстояние между первой захватывающей частью 11 и второй захватывающей частью 21, имеющимися для второго элемента 20, дополнительно уменьшается.
Следует отметить, что на втором этапе уменьшения расстояния крутящий момент, который вращает рабочий элемент 40, передается на третий элемент 30, и третий элемент 30 вращается вместе с рабочим элементом 40 в первом направлении R1 вращения. Крутящий момент передается в состоянии, когда положение рабочего элемента 40 находится в относительном нижнем предельном положении по отношению к третьему элементу 30. Более конкретно, крутящий момент, описанный выше, передается от рабочего элемента 40 к третьему элементу 30 посредством контакта между второй поверхностью 32 третьего элемента 30 и четвертой поверхностью 45 рабочего элемента 40.
Этап освобождения захвата
Далее будет описан этап освобождения захвата (другими словами, третий этап ST3) объекта W, захваченного первой захватывающей частью 11 и второй захватывающей частью 21.
На третьем этапе ST3 (этап освобождения захвата) рабочий элемент 40 вращают во втором направлении R2 вращения, и, таким образом, захват объекта W, захваченного первой захватывающей частью 11 и второй захватывающей частью 21, освобождается.
Третий этап ST3 (этап освобождения захвата) включает в себя второй этап переключения, на котором блокирующий механизм M переводят из заблокированного состояния в разблокированное состояние посредством относительного вращения между третьим элементом 30 и рабочим элементом 40, и этап увеличения расстояния для увеличения расстояния между первой захватывающей частью 11 и второй захватывающей частью 21 посредством относительного вращения между третьим элементом 30 и вторым элементом 20.
На втором этапе переключения относительное вращение между третьим элементом 30 и рабочим элементом 40 вызывает перемещение рабочего элемента 40 в первом направлении DR1 (более конкретно, в направлении из заднего положения (см. фиг. 7) в переднее положение (см. фиг. 8)). Перемещение рабочего элемента 40 в первом направлении DR1 вызывает обеспечение прижимания с помощью прижимающей части 46 рабочего элемента 40 второго участка 15 зацепления к первому элементу 10. В ответ на то, что прижимающая часть 46 прижимает второй участок 15 зацепления, зацепление между участком 35 зацепления и вторым участком 15 зацепления освобождается. Таким образом, блокирующий механизм M переключается из заблокированного состояния в разблокированное состояние.
Следует отметить, что на втором этапе переключения предпочтительно, чтобы относительное положение рабочего элемента 40 по отношению к третьему элементу 30 перемещалось из относительного нижнего предельного положения в относительное верхнее предельное положение. При перемещении положения рабочего элемента 40 из относительного нижнего предельного положения в относительное верхнее предельное положение блокирующий механизм M надежно переключается из заблокированного состояния в разблокированное состояние.
После выполнения второго этапа переключения осуществляют этап увеличения расстояния путем дальнейшего вращения рабочего элемента 40 во втором направлении R2 вращения. На этапе увеличения расстояния относительное вращение между третьим элементом 30 и вторым элементом 20 заставляет второй элемент 20, ввинченный в третий элемент 30, перемещаться во втором направлении DR2. Таким образом, расстояние между второй захватывающей частью 21, обеспечиваемое для второго элемента 20, и первой захватывающей частью 11 увеличивается. Следует отметить, что на этапе увеличения расстояния крутящий момент, который вращает рабочий элемент 40, передается на третий элемент 30, и третий элемент 30 вращается вместе с рабочим элементом 40 во втором направлении R2 вращения. Крутящий момент передается в состоянии, когда положение рабочего элемента 40 находится в относительном верхнем предельном положении по отношению к третьему элементу 30. Более конкретно, крутящий момент, описанный выше, передается от рабочего элемента 40 к третьему элементу 30 посредством контакта между первой поверхностью 31 третьего элемента 30 и третьей поверхностью 44 рабочего элемента 40.
Вследствие того, что осуществляют этап увеличения расстояния, захват объекта W, захваченного первой захватывающей частью 11 и второй захватывающей частью 21, освобождается (см. фиг. 9).
В способе применения захватывающего инструмента в первом варианте осуществления изобретения, только с вращением рабочего элемента 40 во втором направлении R2 вращения, этап увеличения расстояния заключается в увеличении расстояния между первой захватывающей частью 11 и второй захватывающей частью 21, а второй этап переключения, заключающийся в переключении состояния блокирующего механизма M из заблокированного состояния в разблокированное состояние, осуществляют непрерывно. Следовательно, в первом варианте осуществления обеспечивается способ применения захватывающего инструмента, который можно переключать между заблокированным состоянием и разблокированным состоянием с помощью простой операции.
Второй вариант осуществления изобретения
Захватывающий инструмент 1B во втором варианте осуществления изобретения будет описан со ссылкой на фиг. 10 и фиг. 11. Фиг. 10 представляет собой общий вид сзади, схематично поясняющий захватывающий инструмент 1B во втором варианте осуществления. Фиг. 11 представляет вид в разрезе, если смотреть по стрелке A-A на фиг. 10.
Во втором варианте осуществления изобретения будут в основном описаны особенности, отличные от особенностей первого варианта осуществления, и повторное описание особенностей, уже описанных в первом варианте осуществления, будет опущено. Таким образом, нет необходимости говорить, что особенность, уже описанная в первом варианте осуществления, может использоваться во втором варианте осуществления, даже если она явно не описана во втором варианте осуществления.
Захватывающий инструмент 1B во втором варианте осуществления изобретения включает в себя первый элемент 10, второй элемент 20, третий элемент 30, рабочий элемент 40 и блокирующий механизм M. Первый элемент 10, второй элемент 20, третий элемент 30, рабочий элемент 40 и блокирующий механизм M уже были описаны в первом варианте осуществления. Таким образом, дублированное описание первого элемента 10, второго элемента 20, третьего элемента 30, рабочего элемента 40 и блокирующего механизма M будет опущено.
Первый элемент 10
В примере, представленном на фиг. 11, первый элемент 10 имеет углубление 17, в которое входит элемент K2 зацепления. Кроме того, первый элемент 10 имеет продолговатое отверстие 18, сообщающееся с углублением 17. Элемент K2 зацепления, который может входить в зацепление с участком 35 зацепления третьего элемента 30, вставляется в углубление 17, описанное выше. Кроме того, первый штифтовый элемент P1, прикрепленный к элементу K2 зацепления, вставляется в продолговатое отверстие 18. Первый штифтовый элемент P1 функционирует как удерживающий элемент, который предотвращает выпадение элемента K2 зацепления из углубления 17.
В примере, представленном на фиг. 11, после того, как толкающий элемент 16 и элемент K2 зацепления вставлены в углубление 17, первый штифтовый элемент P1 прикрепляют к элементу K2 зацепления. Часть элемента K2 зацепления, расположенная в углублении 17, выступает из углубления 17 вследствие воздействия толкающей силы от толкающего элемента 16. Кроме того, выступающая часть функционирует как второй участок 15 зацепления, который может взаимодействовать с участком 35 зацепления третьего элемента 30.
Второй элемент 20
В примере, представленном на фиг. 11, второй элемент 20 сформирован из узла компонентов, включая вторую захватывающую часть 21 (и стопор 210 вращения) и компоненты, включающие в себя резьбовой стержень 23. Следует отметить, что при зацеплении с первым элементом 10 стопор 210 вращения предотвращает вращение второго элемента 20 относительно первого элемента 10.
Третий элемент 30
Третий элемент 30 включает в себя первый цилиндрический элемент 36 и элемент K1 зацепления, имеющий участок 35 зацепления. Третий элемент 30 может включать в себя по меньшей мере один элемент из удерживающего элемента 37, первого фиксирующего элемента F1 и стопорного элемента 38.
В примере, представленном на фиг. 11, первый цилиндрический элемент 36 включает в себя первую резьбовую часть (33f), навинченную на резьбовой стержень 23 второго элемента 20, и вторую резьбовую часть (33m), ввинченную в рабочий элемент 40. Следует отметить, что первый цилиндрический элемент 36 может быть сформирован с помощью объединения компонента, сформированного с первой резьбовой частью, и компонента, сформированного со второй резьбовой частью. В примере, представленном на фиг. 11, первая резьбовая часть (33f) представляет собой часть с внутренней резьбой, сформированную на внутренней окружной поверхности первого цилиндрического элемента 36, а вторая резьбовая часть (33m) представляет собой часть с внешней резьбой, сформированную на внешней окружной поверхности первого цилиндрического элемента 36.
В примере, представленном на фиг. 11, первый цилиндрический элемент 36 прикреплен к первому элементу 10. Более конкретно, первый цилиндрический элемент 36 вставляют в сквозное отверстие 10h, сформированное в первом элементе 10, затем удерживающий элемент 37 устанавливают в первый цилиндрический элемент 36, и, таким образом, первый цилиндрический элемент 36 прикрепляют к первому элементу 10. Следует отметить, что удерживающий элемент 37 прикрепляют к первому цилиндрическому элементу 36 с использованием первого фиксирующего элемента F1. Удерживающий элемент 37 может быть сформирован с помощью гайки, навинченной на резьбовую часть, сформированную на внешней окружной поверхности первого цилиндрического элемента 36. В таком случае, после регулировки относительного положения удерживающего элемента 37 относительно резьбового стержня 23, удерживающий элемент 37 прикрепляют к первому цилиндрическому элементу 36 через первый фиксирующий элемент F1.
В примере, представленном на фиг. 11, элемент K1 зацепления представляет собой кольцевой элемент, имеющий участок 35 зацепления. Участок 35 зацепления формируется на конце на стороне первого направления DR1 элемента K1 зацепления. Элемент K1 зацепления прикреплен к первому цилиндрическому элементу 36 через фиксирующий элемент (более конкретно, второй фиксирующий элемент F2). В примере, представленном на фиг. 11, относительное вращение первого цилиндрического элемента 36 и элемента K1 зацепления невозможно. В качестве альтернативы, элемент K1 зацепления может быть прикреплен к первому цилиндрическому элементу 36 с возможностью поворота относительно первого цилиндрического элемента 36 на предварительно заданный угол.
Элемент K1 зацепления может включать в себя первую поверхность 31, определяющую положение верхнего предела рабочего элемента 40. В примере, представленном на фиг. 11, элемент K1 зацепления имеет заплечик Ks, а нижняя поверхность заплечика Ks функционирует как первая поверхность 31, определяющая верхнее предельное положение рабочего элемента 40.
В примере, представленном на фиг. 11, третий элемент 30 имеет стопорный элемент 38. Стопорный элемент 38 включает в себя вторую поверхность 32, определяющую нижнее предельное положение рабочего элемента 40. В примере, представленном на фиг. 11, углубление 36g (например, кольцевое углубление), которое принимает часть стопорного элемента 38, сформировано на внешней окружной поверхности первого цилиндрического элемента 36. Стопорный элемент 38 вставлен в углубление 36g и, таким образом, первый цилиндрический элемент 36 и стопорный элемент 38 объединены друг с другом. Следует отметить, что стопорный элемент 38 представляет собой элемент, имеющий, например, С-образную форму на виде сверху.
В примере, представленном на фиг. 11, диапазон перемещения рабочего элемента 40 определяется первой поверхностью 31 элемента K1 зацепления и второй поверхностью 32 стопорного элемента 38.
В примере, представленном на фиг. 11, кольцевой воротниковый элемент 39 расположен между первым элементом 10 и третьим элементом 30.
Рабочий элемент 40
В примере, представленном на фиг. 10 и фиг. 11, рабочий элемент 40 включает в себя крепежную часть 47 (более конкретно, канавку), используемую для прикрепления стержня дистанционного управления с возможностью отсоединения. Поскольку рабочий элемент 40 имеет крепежную часть 47, можно использовать стержень дистанционного управления для приведения в действие рабочего элемента 40 (более конкретно, для вращения рабочего элемента 40 в первом направлении R1 вращения и/или втором направлении R2 вращения). В качестве альтернативы, рабочий элемент 40 и стержень дистанционного управления могут быть выполнены как единое целое.
В примере, представленном на фиг. 11, рабочий элемент 40 включает в себя элемент 401 дальней концевой стороны, элемент 402 нижней концевой стороны и третий фиксирующий элемент F3, который фиксирует элемент 402 нижней концевой стороны к элементу 401 дальней концевой стороны.
В примере, представленном на фиг. 11, элемент 401 дальней концевой стороны является цилиндрическим элементом. Прижимающая часть 46 сформирована на конце (на конце на стороне первого направления DR1) элемента 401 дальней концевой стороны.
Элемент 401 дальней концевой стороны может иметь третью поверхность 44, которая может контактировать с первой поверхностью 31, описанной выше, и/или четвертой поверхностью 45, которая может контактировать со второй поверхностью 32, описанной выше. В примере, представленном на фиг. 11, элемент 401 дальней концевой стороны имеет заплечик 401s, а верхняя поверхность заплечика 401s функционирует как третья поверхность 44. Кроме того, элемент 401 дальней концевой стороны имеет выступ 401p, выступающий внутрь, при этом выступ 401p включает в себя четвертую поверхность 45, описанную выше.
В примере, представленном на фиг. 11, элемент 401 дальней концевой стороны имеет резьбовую часть (43f), навинченную на вторую резьбовую часть (33m), описанную выше. В примере, представленном на фиг. 11, резьбовая часть (43f) сформирована на внутренней окружной поверхности выступа 401p.
В примере, представленном на фиг. 11, описанная выше крепежная часть 47 сформирована в элементе 402 нижней концевой стороны. В примере, представленном на фиг. 11, элемент 402 нижней концевой стороны является цилиндрическим элементом. Хотя элемент 402 нижней концевой стороны имеет перегородку 402w в примере, представленном на фиг. 11, перегородка 402w может отсутствовать.
Способ применения захватывающего инструмента
Способ применения захватывающего инструмента во втором варианте осуществления изобретения является таким же, как и способ применения захватывающего инструмента в первом варианте осуществления, за исключением того, что этап прикрепления, заключающийся в прикреплении стержня дистанционного управления к крепежной части 47 рабочего элемента 40, осуществляют перед первым этапом ST1 (другими словами, перед этапом размещения захватываемого объекта W между первой захватывающей частью 11 и второй захватывающей частью 21). Следует отметить, что во втором варианте осуществления, если стержень дистанционного управления и рабочий элемент сформированы как единое целое, этап прикрепления, описанный выше, опускается.
Второй вариант осуществления изобретения обеспечивает те же создающие преимущества эффекты, что и первый вариант. Кроме того, во втором варианте осуществления каждый элемент сформирован с помощью сборки из множества компонентов, и, таким образом, захватывающий инструмент 1B второго варианта осуществления легко собирается.
Изобретение не ограничивается вариантами осуществления, описанными выше, и ясно, что каждый вариант осуществления может быть модифицирован или изменен соответствующим образом в пределах объема технической концепции изобретения. Кроме того, любой компонент, используемый в каждом варианте осуществления изобретения, может быть объединен с другим вариантом осуществления, и любой компонент может быть исключен в каждом варианте осуществления.
Промышленная применимость
Применение захватывающего инструмента и способа применения захватывающего инструмента согласно изобретению позволяет переключаться между заблокированным состоянием и разблокированным состоянием с помощью простой операции. В результате это снижает нагрузку на оператора, который использует захватывающий инструмент для выполнения операций. Следовательно, изобретение полезно для хозяйствующих субъектов, которые выполняют операции с применением захватывающего инструмента, и производителей, которые производят захватывающие инструменты.
Список ссылочных позиций
1, 1A, 1B захватывающий инструмент
10 первый элемент
10h сквозное отверстие
11 первая захватывающая часть
11а первая захватывающая поверхность
15 второй участок зацепления
15а выступ
16 толкающий элемент
17 углубление
18 продолговатое отверстие
20 второй элемент
21 вторая захватывающая часть
21а вторая захватывающая поверхность
23 резьбовой стержень
23m часть с внешней резьбой
30 третий элемент
31 первая поверхность
32 вторая поверхность
33f часть с внутренней резьбой
33m часть с внешней резьбой
35 участок зацепления
35а зубья
36 первый цилиндрический элемент
36g углубление
37 удерживающий элемент
38 стопорный элемент
39 воротниковый элемент
40 рабочий элемент
43f часть с внутренней резьбой
44 третья поверхность
45 четвертая поверхность
46 прижимающая часть
47 крепежная часть
210 стопор вращения
401 элемент дальней концевой стороны
401p выступ
401s заплечик
402 элемент нижней концевой стороны
402w перегородка
F1 первый фиксирующий элемент
F2 второй фиксирующий элемент
F3 третий фиксирующий элемент
K1 элемент зацепления
K2 элемент зацепления
Ks заплечик
M блокирующий механизм
OP проём
P1 первый штифтовый элемент
W захватываемый/захваченный объект
Реферат
Группа изобретений относится к захватывающему инструменту и способу захвата и освобождения объекта захвата захватывающим инструментом. Захватывающий инструмент содержит первый элемент, содержащий первую захватывающую часть, второй элемент, содержащий вторую захватывающую часть, рабочий элемент, способный вызывать перемещение второй захватывающей части относительно первой захватывающей части в направлении, параллельном первому направлению, когда направление от второй захватывающей части к первой захватывающей части определено как первое направление, а направление, противоположное первому направлению, определено как второе направление, третий элемент, ввинченный в рабочий элемент и навинченный на второй элемент, и блокирующий механизм, приспособленный для выполнения переключения между заблокированным состоянием для предотвращения перемещения второй захватывающей части относительно первой захватывающей части во втором направлении и разблокированным состоянием для обеспечения перемещения второй захватывающей части относительно первой захватывающей части во втором направлении, при этом блокирующий механизм включает в себя участок зацепления, выполненный в третьем элементе. Технический результат заключается в создании захватывающего инструмента, который можно переключать между заблокированным состоянием и разблокированным состоянием с помощью простой операции, и в создании способа применения захватывающего инструмента. 2 н. и 6 з.п. ф-лы, 11 ил.
Комментарии