Сенсор spr (радар подповерхностного зондирования) для помощи в осуществлении навигации технического устройства - RU2727087C1
Код документа: RU2727087C1
Чертежи



Описание
Область техники
Настоящее изобретение относится к использованию SPR (радара подповерхностного зондирования) для навигации технических устройств, например, роботов.
Описание предшествующего уровня техники
В настоящее время наблюдается большой интерес к различным сенсорам, которые могут быть использованы для навигации технических устройств, например, роботов, таких, например, как роботы-уборщики и т.п. Такие сенсоры могут помочь в планировании пути робота и в построении карт для движения в неизвестном пространстве, или для обновления карт для движения в известном пространстве с контролем текущего местоположения и пройденного пути робота. Разные сенсоры имеют разные ограничения, которые увеличивают вероятность потери местоположения.
В уровне техники в качестве сенсоров для перемещающихся роботов используются лидары (LIDAR), основными недостатками которых являются ошибки в определении местоположения из-за наличия зон, которые лидар не воспринимает, или зон, которые лидар воспринимает как реальные из-за переотражения. Кроме того, лидары не воспринимают стеклянные поверхности, черные поверхности, низкопрофильные объекты.
Из уровня техники (документ US 8949024 B2, опубликованный 03.02.2015) известно использование радара подповерхностного зондирования для определения того, находится ли транспортное средство на требуемой траектории движения. Полученные SPR-изображения сравниваются с SPR-изображениями, полученными ранее для области, которая, по меньшей мере, частично перекрывает область вдоль траектории движения транспортного средства. В некоторых вариантах осуществления сравнение включает в себя процедуру корреляции изображения. Однако, для успешного определения находится ли транспортное средство на требуемой траектории движения необходимо, чтобы транспортное средство хотя бы частично двигалось по той же траектории, по которой оно двигалось ранее для обучения радара. Кроме того, с помощью известного решения невозможно обнаружить низкопрофильные объекты или жидкости, разлитые на поверхности, а также невозможно определить тип поверхности.
Из уровня техники известна антенна подповерхностного зондирования, документ RU 2622488 C1, дата публикации 15.06.2017. Известное решение относится к сверхширокополосным сверхвысокочастотным антеннам, в частности для применения в бесконтактных сверхширокополосных радарах, для 3D или 2D визуализации подповерхностных структур. Недостатком известного решения является невысокая эффективность традиционного радара, использующего антенну.
На данном этапе развития рассматриваемой области техники требуется дешевое, компактное и быстрое решение, позволяющее повысить стабильность и эффективность навигации робота в пространстве, и имеющее возможность работы при отсутствии камер, имеющее способность определять повторяющееся месторасположение, и имеющее возможность работы как в малых, так и в больших пространствах.
Сущность изобретения
Предлагается устройство SPR-сенсора, содержащее: по меньшей мере одну антенну; по меньшей мере один передатчик; по меньшей мере один приемник; микроконтроллер; причем каждая антенна имеет слой перераспределения токов и излучающий/принимающий слой, состоящий из двух симметричных элементов, причем каждый из элементов выполнен с возможностью переключения между излучающим и принимающим состоянием; причем каждый передатчик и каждый приемник расположены непосредственно на элементах. Причем каждая из по меньшей мере одной антенны является сверхширокополосной СВЧ-антенной. Причем излучающий/принимающий слой каждой из антенн представляет собой слой типа «бабочка». Причем по меньшей мере один приемник и по меньшей мере один передатчик располагаются на разных элементах по меньшей мере одной антенны. Причем по меньшей мере один приемник и по меньшей мере один передатчик располагаются на одном из элементов по меньшей мере одной антенны. Причем по меньшей мере одна пара приемник и передатчик располагается на одном из элементов по меньшей мере одной антенны, а еще по меньшей мере одна пара приемник и передатчик располагается на другом из элементов по меньшей мере одной антенны. Причем на одном элементе антенны располагается пара приемник и передатчик, а на другом элементе антенны только передатчик. Причем на одном элементе антенны располагается пара приемник и передатчик, а на другом элементе антенны только приемник.
Также предлагается техническое устройство, способное перемещаться, содержащее предлагаемый SPR-сенсор.
Предлагается способ определения местоположения технического устройства, содержащий этапы, на которых: излучают посредством элемента антенны SPR-сенсора в направлении поверхности, по которой движется техническое устройство, электромагнитное излучение в виде радиочастотного сигнала посредством передатчика SPR-сенсора; принимают посредством элемента антенны излучение, отраженное от структуры поверхности и/или ее подповерхностных структур, причем принятое излучение попадает на приемник SPR-сенсора, затем подают выходной сигнал приемника SPR-сенсора на микроконтроллер; формируют текущее изображение структуры поверхности и/или подповерхностных структур на основе выходного сигнала приемника SPR-сенсора посредством микроконтроллера; сравнивают полученное текущее изображение с сохраненным изображением из базы данных технического устройства, посредством микроконтроллера; если в ходе сравнения обнаружено, что имеется корреляция между текущим изображением, полученным SPR-сенсором, и сохраненным изображением из базы данных технического устройства, то местоположение технического устройства определяется на основе координат изображения из базы данных технического устройства; если в ходе сравнения обнаружено, что не имеется корреляции между текущим изображением, полученным SPR-сенсором, и сохраненным изображением из базы данных технического устройства, то микроконтроллер запрашивает предоставление соответствующих координат от других активных датчиков технического устройства; если другие активные датчики технического устройства не предоставляют соответствующие координаты, то техническое устройство информирует пользователя о потере ориентации; если другие активные датчики технического устройства предоставляют данные о соответствующих координатах, то добавляют полученное SPR-сенсором текущее изображение и текущие соответствующие координаты в базу данных технического устройства для использования при дальнейшей работе. Причем SPR-сенсор расположен на нижней поверхности технического устройства. Причем SPR-сенсор расположен на техническом устройстве под некоторым углом к поверхности. Причем SPR-сенсор расположен на передней поверхности технического устройства. Причем SPR-сенсор расположен на задней поверхности технического устройства. Причем способ дополнительно содержит этапы, на которых: в случае, если в ходе сравнения обнаружено, что не имеется корреляция и если другие активные датчики предоставляют текущие соответствующие координаты, то если изначально в базе данных технического устройства было изображение данного участка пути, а теперь изображение, полученное при прохождении того же участка, изменилось и не коррелирует с данными из базы данных, то микроконтроллер SPR-сенсора принимает решение, что структура поверхности на данном участке пути изменилась. Причем техническое устройство является роботом-уборщиком. Причем в случае, когда принято решение, что структура поверхности в данном участке пути изменилась, выдают команду роботу-уборщику «убрать загрязнение», причем робот-уборщик закончит исполнять команду «убрать загрязнение» в случае, если изображение данного участка пути опять станет коррелировать с изображением из базы данных.
Краткое описание чертежей
Вышеописанные и другие признаки и преимущества настоящего изобретения поясняются в последующем описании, иллюстрируемом чертежами, на которых представлено следующее:
Фиг. 1а, 1b иллюстрирует конструкцию предлагаемого SPR-сенсора.
Фиг. 2a, 2b показывает размещение предлагаемого SPR-сенсора на техническом устройстве.
Фиг. 3 иллюстрирует вариант алгоритма работы SPR-сенсора.
Фиг. 4 иллюстрирует различные формы излучающих/принимающих слоев антенны.
Фиг. 5 иллюстрирует «шахматное» расположение излучающего/принимающего слоев антенны.
Фиг. 6a, 6b, 6c, 6d иллюстрирует варианты расположения приемника и передатчика.
Фиг. 7a, 7b, 7c, 7d иллюстрирует расположение SPR-сенсоров на техническом устройстве.
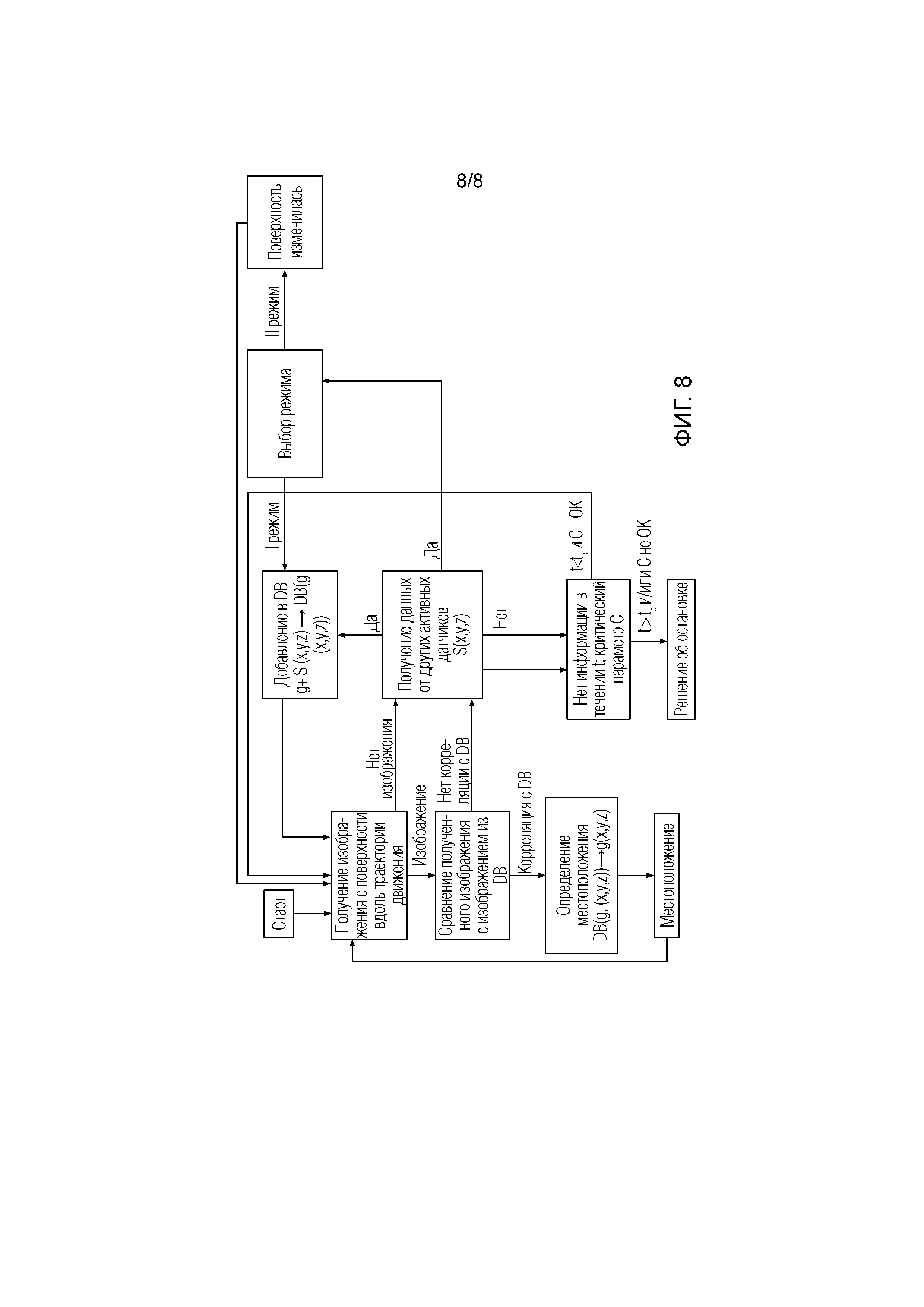
Фиг. 8 иллюстрирует вариант алгоритма использования SPR-сенсора.
Подробное описание изобретения
В настоящем изобретении предлагается использовать SPR (радар подповерхностного зондирования) для помощи в осуществлении навигации способных двигаться технических устройств, в частности, роботов.
Предлагаемое изобретение можно использовать для любых объектов, движущихся по поверхности, при этом расстояние от нижней части (или от антенны радара) объекта до поверхности, по которой движется объект, составляет не более нескольких сантиметров, поэтому объектом может быть, в том числе, и машина, движущаяся по дороге, но качество навигации будет тем лучше, чем меньше расстояние между антеннами радара и поверхностью, и чем стабильнее это расстояние, то есть не меняется в течение движения. Поэтому лучше всего изобретение работает для движущихся внутри помещения объектов, например, таких как, роботы-пылесосы, любые другие передвигающиеся роботы.
Если способное двигаться техническое устройство работает при плохих условиях окружающей среды (например, отключение света, большая площадь поверхности и т. д.), добавление предлагаемого SPR-сенсора к этому техническому устройству, например, такому как робот-пылесос, в качестве дополнительного датчика, позволяет устранить недостатки или сбои датчиков, уже имеющихся в устройстве, например, таких датчиков, как лидары и камеры. С помощью предлагаемого SPR-сенсора получают, в том числе, радиоизображение подповерхностной структуры поверхности, по которой движется техническое устройство. Электромагнитные волны проникают сквозь поверхность, по которой движется техническое устройство, и отражаются от различных структур поверхности или структур, расположенных под этой поверхностью. Для этого используется импульсный SPR-сенсор с частотой излучения до 10 ГГц. Чем выше частота, на которой работает SPR-сенсор, тем меньше проникновение излучения под поверхность, то есть, электромагнитные волны, проникая сквозь поверхность, по которой движется техническое устройство, отражаются либо от элементов структуры упомянутой поверхности, либо от различных неоднородностей, расположенных под упомянутой поверхностью, в том числе коммуникаций, таких как, например, проводка, трубы и т.п. Таким образом, с помощью предлагаемого SPR-сенсора, техническое устройство может ориентироваться в пространстве (например, обнаруживать свое месторасположение) за счет наличия карты коммуникаций, расположенных под поверхностью, по которой движется техническое устройство, или за счет наличия карты структурных особенностей поверхности, по которой движется техническое устройство. То есть, предлагаемый SPR-сенсор предоставляет данные, которые эффективно дополняют, а иногда и заменяют, данные других активных датчиков технического устройства, что является эффективной помощью при осуществлении навигации технического устройства в режиме реального времени.
Необходимо заметить, что при движении техническое устройство избегает столкновения со стенами, стульями и другими объектами на поверхности, благодаря работе других активных датчиков технического устройства, таких как, например, лидар и/или камера.
Использование предлагаемого SPR-сенсора позволяет обнаруживать низкопрофильные объекты (объекты, имеющие малую высоту), в том числе разлитые жидкости, распознавать конфигурацию структуры поверхности, по которой движется устройство, а также распознавать подповерхностные структуры. То есть, по сравнению с известным уровнем техники значительно повышается эффективность работы технического устройства. Предлагаемое изобретение позволяет повысить эффективность и чувствительность SPR-сенсора и уменьшить габаритные размеры SPR-сенсора, а также повышается эффективность навигации технического устройства, содержащего предлагаемый SPR-сенсор.
Необходимо заметить, что к известным в уровне техники SPR радарам относятся и радары GPR (георадиолокатор), основная особенность которых в том, что GPR-радары согласованы для работы с поверхностями с высокой диэлектрической проницаемостью (например, грунт с высоким содержанием воды). Предлагаемое изобретение применимо ко всем видам SPR радаров, включая GPR-радары.
Особенность предлагаемого SPR-сенсора состоит в том, что SPR-сенсор содержит компоненты SPR-радара, антенну и микроконтроллер. Причем компоненты SPR-радара располагаются непосредственно на антенне. Такое расположение компонентов SPR-сенсора позволяет избежать паразитных наводок, поскольку расстояние между компонентами SPR-радара и антенной является минимальным.
Антенна, используемая для создания предлагаемого SPR-сенсора, представляет собой сверхширокополосную микроволновую антенну, раскрытую в документе RU 2622488 C1, дата публикации 15.06.2017, содержащую по меньшей мере два проводящих слоя: излучающий/принимающий слой типа «бабочка», содержащий по меньшей мере два симметричных излучающих/принимающих элемента, и слой перераспределения токов. Как показано на фигуре 1b антенна выполнена по печатной технологии, излучающий/принимающий слой 1 имеет форму «бабочки», слой 2 перераспределения токов показан в виде прямоугольника, причем приемный тракт антенны расположен между излучающими/принимающими элементами антенны, причем приемный тракт представляет собой две точки, по одной на каждом из излучающих/принимающих элементов, расположенные как можно ближе к центру антенны, через ключ эти точки подключены к приемнику Rx и передатчику Tx, чтобы осуществлять попеременно прием и передачу сигнала, что минимизирует габариты SPR-сенсора и позволяет избежать паразитные наводки.
На фигуре 1а видно, что приемник Rx и передатчик Tx SPR-сенсора располагаются непосредственно на антенне, а именно, под двумя симметричными излучающими/принимающими элементами антенны, причем каждый из упомянутых элементов антенны выполнен с возможностью переключения между излучающим состоянием и принимающим состоянием. На фигуре 1 показан вариант, когда упомянутые элементы антенны выполнены в форме двух симметричных треугольников с приемным трактом в центре, причем в одном из вариантов, показанном на фигуре 1, приемник Rx и передатчик Tx SPR-сенсора крепятся на диэлектрический слой 2 перераспределения токов антенны (фигура 1b), причем приемник Rx (фигура 1a) крепится на диэлектрический слой 2 платы антенны под приемной стороной «бабочки» (под элементом антенны, переключенным для работы «на прием»), что в комплексе образует приемник SPR-сенсора; а передатчик Tx крепится на диэлектрический слой платы антенны (под элементом антенны, переключенным для работы «на излучение»), что в комплексе образует передатчик SPR-сенсора. Как показано на фигуре 6(a, b, c, d) комбинация и расположение передатчика и приемника могут быть любые, поскольку симметричные элементы антенны могут переключаться между состоянием излучения и состоянием приема.
Как показано на фигуре 2 a, b, конструкцию SPR-сенсора можно прикреплять к нижней поверхности способного двигаться технического устройства (далее - робота), таким образом, что излучающий/принимающий слой антенны, под которым расположены приемник Rx и передатчик Tx SPR-сенсора, оказывается ориентированным к поверхности (фигура 2a), по которой движется робот.
Благодаря такому расположению приемника Rx и передатчика Tx предлагаемый SPR-сенсор имеет компактные габаритные размеры, что является большим преимуществом при использовании SPR-сенсора, например, в роботах-пылесосах. Кроме того, так как приемник находится в области приемного элемента антенны, а передатчик находится в области передающего элемента антенны, поскольку излучающий/принимающий слой антенны может переключаться между состоянием приема и излучения, то характеристики согласования сигналов и соотношения сигнал-шум улучшаются по сравнению с обычными SPR-радарами, известными из уровня техники.
На фигуре 2 показан вид (a) робота сбоку и вид (b) робота снизу. SPR-сенсор прикреплен к нижней части робота, направленной к поверхности, по которой движется робот.
Антенна может быть приемно/передающей или иметь раздельные приемный и передающий элементы, антенна также может иметь один или более излучающих/принимающих элементов, например, в качестве сверхширокополосной антенны в настоящем изобретении можно использовать антенную решетку c несколькими излучающими и принимающими элементами. Описанная конфигурация является минимальной. Благодаря предлагаемому расположению элементов формируется более высокоэффективный и высокочувствительный SPR-сенсор, поскольку расположение передатчика и приемника SPR-сенсора на антенне исключает необходимость переходов, линий питания и согласующих схем в устройстве SPR-сенсора. Кроме того, расположение излучающих/принимающих элементов антенны, приемника и передатчика в одной зоне значительно уменьшает размер SPR-сенсора, что удобно для встраивания такого компактного SPR-сенсора в компактное техническое устройство, например, в небольшого домашнего робота.
Еще одна особенность предлагаемого SPR-сенсора состоит в том, что SPR-сенсор детектирует структуру поверхности и/или подповерхностную структуру, расположенную под поверхностью, по которой движется робот. Под структурой поверхности понимается структура объема подстилающей поверхности, по которой движется робот, содержащий SPR-сенсор. Например, SPR-сенсор может детектировать неоднородности поверхности, состоящей из, например, плитки, линолеума, паркета, ламината и т.п., за счет получаемых данных диэлектрической проницаемости пола в объеме на некоторой глубине, и путем сравнения этих данных с данными из базы данных, SPR-сенсор может определять местоположение робота, что упрощает навигацию робота в пространстве.
Принцип работы SPR-сенсора состоит в следующем. Когда робот, на нижней части которого расположен SPR-сенсор, движется по поверхности в режиме ознакомления для составления карты структуры поверхности или карты подповерхностной структуры, электромагнитный сигнал, излучаемый антенной, отражается от структур поверхности или подповерхностных структур, по которой передвигается робот, принимается антенной, далее попадает в приемник, далее выходной сигнал приемника попадает в микроконтроллер, который формирует радиограмму (или радиоизображение) из полученных данных. При накоплении некоторого количества сигналов (при этом большее количество сигналов дает большую точность, но работать можно и с одним) полностью формируется радиоизображение поверхности, то есть, например, навигационная карта, которая может быть записана в память (базу данных) робота. Из карты получают информацию на какой глубине и в каких участках под поверхностью или на поверхности есть особенности, то есть неоднородности или объекты (например, проводка, проложенный трубопровод), причем координаты таких особенностей определяют с помощью датчиков, одометра, камеры или других активных датчиков робота. Необходимо отметить, что составленная навигационная карта может быть использована только для поверхности, на которой она снималась, то есть очевидно, что для каждой новой поверхности должна быть своя навигационная карта.
При движении робота в рабочем режимеSPR-сканер снимает текущее радиоизображение структуры поверхности или подповерхностной структуры поверхности и сравнивает его с сохраненным радиоизображением, координаты которого известны из базы данных, определяя, в режиме реального времени, положение робота в системе координат, связанной с поверхностью, по которой движется робот. Другие активные датчики робота получают информацию о местоположении различными способами, причем SPR-сенсор может использовать для своей работы координаты от этих других активных датчиков робота и сохраненные в базе данных робота.
Причем если SPR-сенсор получает в данный момент времени в данном месте радиоизображение, то в базу данных робота могут поступать данные, касающиеся того, что полученное радиоизображение соответствует известным координатам. Если SPR-сенсору не удалось получить радиоизображение, то в базу данных поступают данные, касающиеся того, что для этого места с известными координатами радиоизображение не получено.
Алгоритм использования SPR-сенсора для помощи в осуществлении навигации робота показан на фигуре 3. На фигуре 3 применяются следующие обозначения:
x, y, z - координаты местоположения робота;
g - изображение от SPR-сенсора;
tc - максимальное время ожидания для получения изображения и/или координат;
C - критический параметр системы, под которым понимается какой-либо качественный показатель работоспособности системы, например, заряд батареи робота;
t - время ожидания;
S(x,y,z) - координаты от других сенсоров, отличных от SPR-сенсора;
DB (g, (x,y,z)) - динамически формируемая база данных, формируется с течением времени;
g (x,y,z) - координаты текущего местоположения робота;
Нет изображения - означает, что SPR не получает изображение или имеется изображение с шумом (ниже порога);
Активный датчик - это любой тип бортовых активных датчиков робота, например, LiDAR, ультразвуковой, оптический, камера, UMI, датчик одометра и т. д.
После старта робота SPR-сенсор начинает снимать текущие радиоизображения (далее изображения) структуры поверхности или подповерхностной структуры, по которой движется робот.
Как видно из фигуры 3, если SPR-сенсор имеет возможность получить изображение, то микроконтроллер SPR-сенсора сравнивает полученное изображение с изображением g из базы данных (DB) робота. Если в ходе сравнения обнаруживается, что произошла корреляция между изображением, полученным SPR-сенсором, и изображением g из базы данных робота, то местоположение робота g (x,y,z) определяется на основе координат изображения из базы данных робота DB (g, (x,y,z)), то есть робот принял решение о местоположении. Так как робот продолжает движение, то цикл начинается заново, чтобы опять определить местоположение.Если изображение не получено SPR-сенсором, например, структура поверхности(металлический пол или совершенно однородный) не позволяют сформировать изображение, так как сигнал выглядит в этом случае как шум (поскольку радиограмма состоит из максимумов и минимумов сигнала, если уровень сигнала низкий, то эти максимумы и минимумы не будут различимы по сравнению с собственным шумом устройства), или корреляции между изображением, полученным SPR-сенсором, и изображением с координатами из базы данных робота нет, то SPR-сенсор обращается к другим активным на текущий момент датчикам робота, при этом сигнал для обращения посылает микроконтроллер после принятия решения о том, что изображение не получено или нет корреляции,и запрашивает необходимые данные, то есть соответствующие координаты, от других активных датчиков робота S (x,y,z). Если другие активные датчики робота могут в данный момент предоставить свои данные о текущих координатах робота, то SPR-сенсор (его микроконтроллер) добавляет свое полученное текущее изображение и соответствующие ему координаты, которые получены от других датчиков робота, в базу данных: g+S(x,y,z) → DB(g, (x,y,z)). Необходимо заметить, что база данных формируется из данных как SPR-сенсора, так и данных (в том числе координат от) остальных активных датчиков робота, причем база данных может быть заложена в программном обеспечении робота, либо «в облаке» данных, с которым робот связывается по Wi-Fi.Полученные данные будут использоваться при дальнейшей работе SPR-сенсора и других датчиков робота, то есть база данных может пополняться. Таким образом, с помощью данных SPR-сенсора дополнительно пополняется база данных робота, что делает навигацию робота в реальном режиме времени более эффективной и точной. Если другие активные датчики робота не могут в данный момент предоставить свои данные о соответствующих координатах, то SPR-сенсор не может получить требуемую информацию. Если время ожидания информации от других активных датчиков робота превышает максимальное время ожидания (t > tc), и/или если какой-либо качественный показатель C работоспособности системы (например, заряд батареи) становится критическим (C не OK), то робот останавливается и ожидает внешних воздействий от пользователя, либо робот информирует пользователя какими-либо световыми или звуковыми сигналами о потере ориентации. Если время ожидания информации от других активных датчиков робота не превышает максимальное время ожидания (t < tc), и если все качественные показатели C работоспособности системы не являются критичными (C - OK), то робот продолжает движение и SPR-сенсор продолжает сканировать структуру поверхности или подповерхностную структуру.
Если SPR-сенсор не может получить изображение структуры поверхности или подповерхностной структуры, по которой движется робот, или получает изображение с отношением сигнал-шум ниже порогового, причем пороговое значение является динамическим и определяется средним значением шума сигнала и корректируется в процессе работы робота, то SPR-сенсор обращается к другим активным датчикам робота и требует необходимые данные об координатах, которые воспринимают другие активные датчики в данный момент времени. При получении от других активных датчиков робота данных о координатах, микроконтроллер SPR-сенсора сохраняет их в базе данных. При дальнейшей работе робот продолжает движение и SPR-сенсор использует обновленную базу данных.
Необходимо заметить, что SPR-сенсор исследует структуру поверхности или подповерхностную структуру под собой, поэтому расстояние от сенсора до исследуемой поверхности определяется высотой клиренса движущегося механизма (робота), в то время как лидар и камера, встроенные в робот, анализируют пространство вокруг робота, при это лидар имеет ограниченную дальность действия, а камера плохо работает в условиях низкой освещенности. Предлагаемый SPR-сенсор, прикрепленный к роботу, может использоваться, например, в помещении, в котором отсутствует освещение (то есть, когда не может быть использована камера), или в помещении, где имеются зеркальные поверхности (которые вводят в заблуждение лидары), или в случае, когда площадь помещения является слишком большой, то есть, когда не могут работать другие активные датчики робота, поскольку SPR-сенсор анализирует только структуру поверхности или подповерхностную структуру с помощью радиосигнала.
Как показано на фигуре 4, излучающие/принимающие элементы антенны типа «бабочка», которые составляют топологию антенны, могут иметь различные формы. SPR-сенсор может быть установлен непосредственно в печатную плату устройства, при этом печатная плата устройства может налагать ограничения на габариты и форму антенны типа «бабочка». На фигуре 4 представлены: ромбический тип антенны, полиэдрический тип антенны, округлый тип антенны, произвольный тип антенны. На фигуре 4 показаны примеры антенны с горизонтальной поляризацией, то есть антенна излучает электромагнитное поле, в котором вектор электрического поля горизонтален плоскости движения робота.
На фигуре 5 проиллюстрировано «шахматное» расположение нижнего излучающего слоя СВЧ-антенны. При таком расположении нижнего слоя СВЧ-антенны возникает перпендикулярная поляризация излученного сигнала, то есть антенна излучает электромагнитное поле, в котором вектор электрического поля перпендикулярен плоскости движения робота.
Необходимо отметить, что приемник Rx и передатчик Tx могут располагаться как в области разных излучающих элементов антенны, так и в области одного из элементов антенны. Кроме того, одна пара приемник Rx и передатчик Tx может располагаться в области одного излучающего элемента антенны, а еще одна пара приемник Rx и передатчик Txможет располагаться в области другого излучающего элемента антенны. В другом варианте осуществления в области излучающего/принимающего элемента СВЧ-антенны может располагаться пара приемник Rx и передатчик Tx,а в области другого излучающего/принимающего элемента антенны только передатчик Tx. Еще в одном варианте осуществления в области одного излучающего элемента антенны может располагаться пара приемник Rx и передатчик Tx,а в области другого излучающего элемента антенны - только приемник. Приемлема любая конфигурация.
На фигуре 6 (a, b, c, d) показано, что SPR-сенсор может содержать несколько антенн, в области излучающих/принимающих элементов которых могут располагаться приемники и передатчики в любой последовательности и в любом количестве.
На фигуре 7 (a, b, c, d) показано, что SPR-сенсоры (позиция 3) могут быть расположены под некоторым углом к поверхности, по которой движется робот, например, спереди или сзади робота (фигура 7 a и b). На фигуре 7c показано расположение SPR-сенсора на нижней части робота, при этом антенна может ориентироваться перпендикулярно перемещению робота. На фигуре 7d показан вариант, когда несколько SPR-сенсоров прикреплены к роботу, здесь необходимо заметить, что к роботу можно прикреплять любое необходимое количество SPR-сенсоров.
Альтернативный вариант алгоритма использования SPR-сенсора проиллюстрирован на фигуре 8. Такой алгоритм направлен на детектирование низкопрофильных объектов, например, таких как жидкости, которые разлиты на поверхности.
Основное отличие от алгоритма, изображенного на фигуре 3, состоит в том, что если изображение не получено SPR-сенсором, например, структура пола (металлический пол или совершенно однородный) не позволяют сформировать изображение, так как сигнал выглядит в этом случае как шум, или корреляции между изображением, полученным SPR-сенсором, и координатами из базы данных нет (то есть на месте с известными координатами, имеющем изображение структуры поверхности, вдруг появилась разлитая жидкость, то есть корреляция между координатами и изображением нарушена), то SPR-сенсор обращается к другим активным датчикам робота и запрашивает необходимые данные, которые активные датчики робота предоставляют в данный момент (соответствующие координаты). В этом случае включается выбор одного из режимов:
I РЕЖИМ - если другие активные датчики робота могут предоставить данные о текущих координатах робота в данный момент времени, то, в случае, если изначально в базе данных не было изображения данного участка пути и/или его координат, то, получив данные (координаты) от других активных датчиков, робот сохраняет их базе данных;
II РЕЖИМ - если другие активные датчики робота могут предоставить данные о текущих координатах робота данного участка пути, то, в случае, если изначально в базе данных робота было изображение данного участка пути и его координаты, а теперь изображение, полученное при прохождении того же участка, изменилось и не коррелирует с данными из базы данных (то есть с сохраненным изображением и соответствующими этому сохраненному изображению координатами), то SPR-сенсор принимает решение, что поверхность в данном месте изменилась, далее поступает команда роботу - убрать загрязнение. После того, как загрязнение убрано, робот продолжает работу.
При использовании SPR-сенсора повышается эффективность навигации робота, благодаря дополнительным навигационным данным, получаемым при использовании предлагаемого варианта алгоритма работы SPR-сенсора.
Структура поверхности, обнаруженная посредством предлагаемого SPR-сенсора, может использоваться в качестве как дополнительной, так и основной навигационной информации в случае отказа других датчиков робота. Предлагаемый SPR-сенсор не чувствителен к свету, присутствию людей и домашних животных, изменению положения мебели и т. д., поэтому в случае необходимости предлагаемый SPR-сенсор может заменить датчики робота, такие как лидар и/или камера.
Благодаря предлагаемому SPR-сенсору роботом-пылесосом может определяться состояние поверхности, например, наличие на поверхности грязи, разлитых жидкостей и т.п., в этом случае робот может начать уборку и отмывание и будет производить эти манипуляции до тех пор, пока SPR-сенсор не обнаружит, что загрязнение исчезло. SPR-сенсор будет детектировать загрязнение до тех пор, пока радиоизображение от конкретного места не будет максимально совпадать с исходным радиоизображением от этого места.
Хотя изобретение описано в связи с некоторыми иллюстративными вариантами осуществления, следует понимать, что сущность изобретения не ограничивается этими конкретными вариантами осуществления. Напротив, предполагается, что сущность изобретения включает в себя все альтернативы, коррекции и эквиваленты, которые могут быть включены в сущность и объем формулы изобретения.
Кроме того, изобретение сохраняет все эквиваленты заявляемого изобретения, даже если пункты формулы изобретения изменяются в процессе рассмотрения.
Реферат
Настоящая группа изобретений относится к использованию SPR-сенсора для навигации технических устройств, способных перемещаться. Техническим результатом является повышение эффективности работы технического устройства, эффективности и чувствительности SPR-сенсора, уменьшение габаритных размеров SPR-сенсора, повышение эффективности навигации технического устройства, содержащего предлагаемый SPR-сенсор. Раскрыто устройство SPR-сенсора, который содержит антенну, передатчик, приемник. Передатчик и приемник расположены непосредственно на элементах. Предлагается техническое устройство, содержащее предлагаемый SPR-сенсор. Раскрыт способ определения местоположения технического устройства, содержащего SPR-сенсор. 3 н. и 14 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Антенна подповерхностного зондирования
Комментарии