Машина для транспортировки для укладывания яиц на полу птичника, причем указанные яйца расположены в инкубационных лотках, в которые они были уложены - RU2757422C2
Код документа: RU2757422C2
Чертежи
Описание
Настоящее изобретение относится к машине для транспортировки для укладывания яиц на полу в птичнике, причем указанные яйца находятся в инкубационных лотках, в которые они были уложены. Яйца для закладки в инкубационных лотках сначала перемещают в птичник. Затем яйца для закладки перемещают из инкубационных лотков на пол птичника. Цыплята затем вылупляются в бройлерном птичнике, что способствует соблюдению условий содержания птиц. В итоге, цыплят больше не нужно перевозить, и они также сразу же получают корм и воду в месте своего расположения.
На практике возникает проблема, состоящая в том, что цыплята не вылупляются одновременно из яиц для закладки. Например, в случае кур существуют яйца, из которых цыплята вылупляются уже через 19 дней, в то время как из некоторых яиц цыплята вылупляются только через 21 день. Если дать возможность цыплятам вылупляться из яиц в инкубатории и перевозить суточных цыплят в бройлерный птичник, это будет означать, что некоторые цыплята останутся без пищи или питья в течение 2–3 дней. Во время транспортировки цыплят и ее подготовки цыплята также плотно размещают рядом друг с другом. Это не только оказывает неблагоприятное влияние на условия содержания птиц, но также на рост и развитие цыплят и на их восприимчивость к болезням.
Чтобы избежать этого, были разработаны новые системы, в которых яйца для закладки, которые, в частности, инкубировались в течение 18 дней, доставляли в бройлерный птичник, где из яиц затем могли вылупляться цыплята. В так называемой «системе X–Treck» яйца для закладки вместе с инкубационными лотками, в которых они размещены, помещают в систему транспортировки, подвешенную в птичнике. Затем температуру яиц в инкубационных лотках можно регулировать, поднимая систему транспортировки в птичнике до высоты, где она теплее, или опуская ее до высоты, где она холоднее. В частности, незадолго до вылупления цыплят из яиц, их температура повышается, потому что повышается активность цыпленка в яйце. Систему транспортировки затем располагают на ограниченной высоте над полом птичника так, чтобы цыплята могли выпрыгивать из системы транспортировки и оказываться на полу бройлерного птичника.
С помощью так называемой «системы Патио» несколько систем транспортировки для инкубационных лотков устанавливают друг над другом, причем каждая из них имеет под собой конвейерную ленту, покрытую подстилкой, на которой цыплята могут жить, пока они не будут готовы к убою. Аэрацию различных уровней осуществляют с помощью горизонтального воздушного потока, как описано в NL 1012453. Преимущество этой системы Патио состоит в том, что в птичнике требуется меньше места, но эта система, конечно, дороже, чем система X–Treck.
EP 2873319 относится к системе X–Treck, в которой инкубационные лотки, содержащие яйца для закладки, размещают в системе подъема в бройлерном птичнике. Согласно этой заявке на патент, система подъема необходима для того, чтобы обеспечить регулирование температуры яиц, так как яйца, размещенные на полу бройлерного птичника, имеют более низкий показатель вывода яиц.
Ввиду стоимости, сложности обслуживания и дополнительной работы, связанной с очисткой системы, эти известные системы применяют на практике только в ограниченных масштабах. Поскольку суточные цыплята выводятся в инкубационных лотках и продолжают ходить по ним в течение некоторого времени, инкубационные лотки загрязняются пометом недавно вылупившихся цыплят. В результате существует реальный риск инфицирования инкубационных лотков микробами, особенно вредными бактериями, такими как сальмонелла. Из–за риска загрязнения, а также стоимости обеих систем птицеводы не склонны размещать такую систему в своих птичниках. Из–за сложной конструкции инкубационных лотков с высокой степенью открытости, которая необходима для регулировки температуры яиц во время закладки, инкубационные лотки также трудно очищать. В частности, инкубационные лотки имеют много углов и краев, из которых нелегко удалить инфекцию или помет, который может быть инфицирован, например, сальмонеллой. Еще один недостаток того, что цыплята могут выводиться в самом инкубационном лотке, состоит в том, что из–за его большой степени открытости существует проблема с условиями содержания птиц. Фактически недавно вылупившиеся цыплята могут повреждаться из–за множества углов и краев, которые имеются в инкубационных лотках, чтобы удерживать яйца, сохраняя высокую степень открытости для требуемого воздушного потока. В результате цыплята могут даже застрять в инкубационных лотках.
В ЕР 1414291 описана другая система для обеспечения возможности вылупления цыплят из яиц в птичнике. Как схематично показано в этом патенте, цыплятам не дают вылупляться из яиц для закладки в инкубационных лотках, а укладывают на лист бумаги на слое подстилки. Корм и воду также предоставляют для недавно вылупившихся цыплят на этом листе бумаги. Чтобы держать температуру яиц под контролем, их помещают в закрытую тележку или накрывают крышкой, когда они размещены на самом полу бройлерного птичника.
Хотя в ЕР 1414291 указана возможность размещения яиц для закладки на листе бумаги поверх слоя подстилки, это никогда не практиковалось, в частности, ни в системе Патио, ни в системе X–Treck. В бройлерном птичнике несколько тысяч или даже десятки тысяч, например, 40000, яиц для закладки должны быть корректно разложены по местам, так что требуется немного времени для размещения яиц для закладки на месте. С учетом стоимости ручного труда, если яйца требовалось бы свободно уложить в бройлерном птичнике, это необходимо было бы сделать быстро, что не только очень затруднительно, помимо прочего из–за высокой температуры в бройлерном птичнике, но также могло бы привести к высокому риску повреждения яиц. К моменту вылупления яичная скорлупа становится гораздо более хрупкой, поэтому с яйцами следует обращаться аккуратно, в частности, чтобы предотвратить образование волосяных трещин в яичной скорлупе. В случае появления волосяных трещин цыплята в яйцах высыхают быстрее, что приводит к их ослаблению, и они становятся более восприимчивыми к инфекциям. В результате, если яйца имеют волосяные трещины, из яиц вылупится меньше цыплят, как правило, по существу на 15% меньше, и для борьбы с бактериальными инфекциями потребуется больше антибиотиков. Такое лечение антибиотиками в последние годы не одобрялось, и поэтому его следует избегать, насколько это возможно.
Чтобы предотвратить передачу заражения через инкубационные лотки, в документе WO 2016/053088 предлагается перемещать яйца для закладки из инкубационных лотков в картонный контейнер перед тем, как яйца перевезут в бройлерный птичник. Таким образом, яйца для закладки перевозят из инкубатора в бройлерный птичник в этих картонных контейнерах. Эту систему используют на практике под названием «One2Born». Картонные контейнеры состоят из картонных коробок для яиц с дополнительными отверстиями для аэрации яиц и регулирования их температуры. Контейнеры стоят на картонных ножках так, чтобы яйца не находились прямо на полу птичника.
Несмотря на то, что картонные контейнеры являются биоразлагаемыми, они создают дополнительные отходы в птичнике, которые необходимо убирать. Еще одним недостатком картонных контейнеров является то, что их поставляют в сложенном виде, и что для их сбора требуется значительное количество ручного труда. Таким образом, не только покупка картонных контейнеров, но и их сбор требует дополнительных затрат. В самом инкубатории яйца также необходимо переместить в картонные контейнеры. На практике было обнаружено, что такой этап перемещения каждый раз вызывает дополнительную среднюю потерю приблизительно в 0,5%, особенно если яйца должны быть расположены в предусмотренных для этой цели полостях в картонных коробках для яиц. Фактически, яйца не всегда будут расположены совершенно корректно относительно этих полостей, так что они будут соприкасаться со стенками полостей при их размещении в полостях. Из–за хрупкости яичной скорлупы, это вызовет значительное количество волосяных трещин в яичной скорлупе.
В BE 1023719 описана машина для транспортировки согласно преамбуле 1 пункта формулы изобретения, которая решает проблемы систем, описанных выше. В частности, машина для транспортировки содержит раму, которую можно катить по птичнику; несущий механизм, установленный на раме и выполненный с возможностью переноса по меньшей мере одного из указанных инкубационных лотков с яйцами для закладки; и механизм перемещения, прикрепленный к раме, который имеет ряд средств для захвата яиц, каждое из которых выполнено с возможностью захвата одного из яиц для закладки, причем механизм перемещения выполнен с возможностью подъема яиц для закладки из указанных инкубационных лотков и размещения яиц для закладки на указанном полу.
Использование такой машины для транспортировки позволяет укладывать большое количество яиц для закладки, например, от тысяч до десятков тысяч яиц в час, прямо из их инкубационных лотков в изолирующий слой подстилки в птичнике. Кроме того, инкубационные лотки не могут таким образом загрязняться пометом, производимым суточными цыплятами. Поскольку на практике птичник дезинфицируют перед каждой новой загрузкой цыплят и снабжают новым слоем подстилки, также нет риска инфицирования инкубационных лотков. Физического контакта между инкубационными лотками и материалами в птичнике также можно легко избежать. Кроме того, дезинфекция инкубационных лотков очень проста, поскольку сами инкубационные лотки не загрязняются.
Кроме того, в BE 1023719 описано, что, в отличие от того, что указано в ЕР 2873319, показатель вывода цыплят из яиц в птичнике не ниже, чем показатель вывода цыплят из тех же яиц в инкубатории, когда яйца для закладки укладывают на полу птичника.
Машина для транспортировки в BE 1023719 снабжена конвейерной лентой, на которой размещают инкубационные лотки, и поворотной роботизированной рукой с рядом средств для захвата яиц на ней, в частности, рядом присосок. Роботизированная рука выполнена с возможностью опускания средств для захвата яиц рядом с инкубационным лотком на конвейерной ленте, после чего средства для захвата яиц могут захватывать яйца. Роботизированная рука затем поднимает яйца и поворачивает их над слоем подстилки, после чего роботизированная рука опускает яйца рядом со слоем подстилки. Затем средства для захвата яиц отключают, и яйца попадают на слой подстилки в птичнике.
Недостаток известной машины состоит в том, что для того, чтобы иметь достаточную производительность, т.е. иметь возможность помещать достаточное количество яиц в час в птичнике, движение роботизированной руки, в частности поворотное движение роботизированной руки, должно иметь относительно высокую скорость. Однако такая относительно высокая скорость связана с высоким риском повреждения яиц. Кроме того, как описано выше, к моменту вылупления яичная скорлупа становится намного более хрупкой, поэтому с яйцами следует обращаться аккуратно, в частности, чтобы предотвратить образование волосяных трещин в яичной скорлупе. Кроме того, риск повреждения во время поворотного движения роботизированной руки еще выше, поскольку яйца в этот момент висят на присосках и, таким образом, могут столкнуться друг с другом. Вследствие всего этого, в известной машине для транспортировки максимальная производительность ограничена максимальной безопасной скоростью поворотного движения роботизированной руки.
Кроме того, из–за длины роботизированной руки во время поворота роботизированной руки может происходить качательное движение машины. Такое качательное движение машины вредно для яиц, поскольку в результате они могут повреждаться. Этот эффект еще сильнее, поскольку дистальная часть роботизированной руки имеет больший вес, и еще более усиливается, если машина оснащена колесами с пневматическими шинами.
Еще одним недостатком известной машины является то, что роботизированная рука должна справляться с относительно большой силой, в частности моментом силы, потому что инкубационные лотки расположены по меньшей мере временно, рядом с роботизированной рукой. Следовательно, роботизированная рука должна быть достаточно прочной, чтобы выдерживать вес наполненных инкубационных лотков с учетом эффекта рычага, обусловленного расстоянием между инкубационными лотками и точкой опоры роботизированной руки. В такой роботизированной руке увеличен как вес роботизированной руки, т.е., машины, так и цена на изготовление машины.
Поэтому цель изобретения состоит в том, чтобы предложить усовершенствованную машину для транспортировки для укладывания яиц в птичнике на его полу, которые уложены в инкубационных лотках, причем максимальная производительность увеличивается без увеличения риска дополнительной потери яиц.
С этой целью машина для транспортировки согласно изобретению отличается тем, что механизм перемещения установлен с возможностью перемещения на раме вверх и вниз по заранее заданному пути между верхним положением и нижним положением, и тем, что опорный механизм установлен с возможностью перемещения на раме между внешним положением, в котором несущий механизм находится вне пути механизма перемещения, и внутренним положением, в котором несущий механизм расположен на пути механизма перемещения, причем машина для транспортировки дополнительно содержит: первый исполнительный механизм, выполненный с возможностью перемещения механизма перемещения вверх и вниз; второй исполнительный механизм, выполненный с возможностью перемещения несущего механизма вперед и назад; третий исполнительный механизм, выполненный с возможностью приведения в действие средств для захвата яиц; и механизм управления, выполненный с возможностью осуществления следующих этапов: а) управления указанным вторым исполнительным механизмом для перемещения несущего механизма из его внешнего положения в его внутреннее положение; b) управления указанным первым исполнительным механизмом для перемещения механизма перемещения вниз к яйцам для закладки, расположенным в указанных инкубационных лотках на несущем механизме; c) управления указанным третьим исполнительным механизмом для захвата яиц для закладки с помощью средств для захвата яиц; d) управления указанным вторым исполнительным механизмом для перемещения несущего механизма из его внутреннего положения в его внешнее положение; е) управления указанным первым исполнительным механизмом для перемещения механизма перемещения вниз по направлению к полу вдоль пути; f) управления указанным третьим исполнительным механизмом для высвобождения яиц для закладки из средств для захвата яиц, чтобы поместить их на полу; и g) управления указанным первым исполнительным механизмом для перемещения механизма перемещения вверх в его верхнее положение.
Размещая несущий механизм на и вне пути механизма перемещения, можно обеспечить механизм перемещения, где яйца следует перемещать вверх и вниз только тогда, когда они были захвачены средствами для захвата яйца. Такие вертикальные перемещения приводят к меньшему риску повреждения яиц, потому что вертикальное перемещение менее опасно по сравнению с горизонтальным перемещением, и, в частности, еще и потому что нет риска того, что яйца могут соприкоснуться друг с другом в боковом направлении. Кроме того, яйца все еще находятся в инкубационном лотке во время перемещения вперед и назад несущего механизма. Благодаря дополнительной защите, обеспечиваемой инкубационным лотком, это перемещение вперед и назад, таким образом, можно выполнять быстрее, чем поворотное движение в уже известной машине для транспортировки. Следовательно, комбинированное движение при перемещении вперед и назад несущего механизма и перемещении вверх и вниз механизма перемещения происходит быстрее, чем движение известной роботизированной руки, что приводит к более высокой максимальной производительности без увеличения риска дополнительной потери яиц.
В варианте осуществления изобретения механизм перемещения содержит по меньшей мере два несущих элемента, которые могут перемещаться друг к другу и друг от друга, и четвертый исполнительный механизм, выполненный с возможностью перемещения указанных по меньшей мере двух несущих элементов друг к другу и друг от друга, где несколько из ряда средств для захвата яиц используют на каждом из несущих элементов, и механизм управления, дополнительно выполненный с возможностью: управления, после этапа d) и перед этапом f), указанным четвертым исполнительным механизмом для перемещения указанных несущих элементов друг от друга; и, после этапа f), управления указанным четвертым исполнительным механизмом для перемещения указанных несущих элементов друг к другу.
В этом варианте осуществления возможно изменять расстояние между яйцами. Это выгодно, поскольку было определено, что расстояние между яйцами оказывает существенное влияние на их температуру. Например, внешний ряд яиц из полосы яиц будет иметь более низкую температуру, чем яйца, расположенные в середине полосы. Поместив яйца на несколько большем расстоянии друг от друга, можно предотвратить слишком высокую температуру яиц к моменту вылупления.
Предпочтительно указанный четвертый исполнительный механизм содержит пневматический поршневой механизм, в котором между указанными несущими элементами предусмотрен по меньшей мере один регулируемый ограничитель для управления и ограничения максимального расстояния между указанными несущими элементами. Регулируемый ограничитель позволяет регулировать расстояние между яйцами, так что размер яиц также может быть учтен. Таким образом, например, для более крупных яиц между яйцами может быть обеспечено большее расстояние.
В варианте осуществления изобретения заранее заданный путь механизма перемещения определяет заранее заданный путь каждого из средств для захвата яиц из ряда средств для захвата яиц, причем несущий механизм содержит средства позиционирования, выполненные с возможностью расположения инкубационного лотка так, чтобы каждое из яиц для закладки находилось на заранее заданном пути одного из средств для захвата яиц, при этом несущий механизм содержит пятый исполнительный механизм, выполненный с возможностью приведения в действие средств позиционирования, и причем механизм управления дополнительно выполнен с возможностью управления перед этапом b) указанным пятым исполнительным механизмом для расположения инкубационного лотка на пути несущего механизма так, что каждое из яиц для закладки находится на заранее заданном пути одного из средств для захвата яиц.
В этом варианте осуществления инкубационные лотки автоматически располагают корректно с помощью средств позиционирования, так что каждый из путей средств для захвата яиц пересекается с местоположением яйца. Эта автоматизация дает дополнительный выигрыш во времени во время укладывания яиц.
Предпочтительно средства позиционирования содержат транспортировочный механизм, выполненный с возможностью перемещения инкубационного лотка по существу в горизонтальном направлении.
Предпочтительно несущий механизм установлен с возможностью перемещения вперед и назад на раме по существу в горизонтальном направлении.
Горизонтальные направления ограничивают расстояние перемещения и, следовательно, время перемещения как транспортировочного механизма, так и несущего механизма.
Кроме того, особенно выгодно, чтобы направление перемещения средств позиционирования было по существу перпендикулярно направлению перемещения несущего механизма вперед и назад. Это позволяет размещать несущий механизм перед или за механизмом перемещения, где несущий механизм может быть загружен в поперечном направлении.
В варианте осуществления изобретения указанные инкубационные лотки имеют по существу прямоугольную форму, причем несущий механизм предусмотрен для переноса по меньшей мере двух инкубационных лотков, которые расположены своими короткими сторонами почти друг напротив друга.
В известной машине для транспортировки, как описано в BE 1023719, инкубационные лотки размещают своими длинными сторонами друг напротив друга для того, чтобы избежать больших сил, в частности, моментов сил, связанных с размещением инкубационных лотков друг напротив друга вдоль своих коротких сторон. Однако предпочтительно размещать инкубационные лотки своими короткими сторонами друг напротив друга, поскольку это ограничивает общее расстояние перемещения машины для транспортировки.
В варианте осуществления изобретения каждое средство для захвата яиц содержит присоску, которая выполнена с возможностью того, чтобы во время этапа b) контактировать с одним из яиц для закладки, причем указанный третий исполнительный механизм, предпочтительно вакуумный насос, выполнен с возможностью всасывания воздуха из присосок для захвата яиц для закладки с помощью всасывания.
Присоски предпочтительнее механических захватов, потому что они несут наименьший риск повреждения яиц.
Предпочтительно указанные присоски являются упругими, предпочтительно сильфонного типа, так что на этапе f) под действием силы, создаваемой упругими присосками, каждое из яиц для закладки проникает на определенную глубину в слой материала покрытия, предпочтительно материала изоляционного покрытия, который, более предпочтительно, содержит подстилку, на полу птичника.
Предпочтительно, указанный третий исполнительный механизм дополнительно выполнен с возможностью накачивания во время этапа f) воздуха в каждую присоску так, чтобы каждое из яиц для закладки проникало на определенную глубину в слой материала покрытия, предпочтительно материала изоляционного покрытия, который, более предпочтительно, содержит подстилку, на полу птичника.
Благодаря упругому действию и/или накачиванию воздуха яйца проталкивают на определенную глубину в слой материала покрытия. Это позволяет регулировать изоляцию яиц. Чем глубже яйца находятся в материале покрытия, тем больше они будут изолированы от окружающего воздуха.
В варианте осуществления изобретения один или несколько, предпочтительно каждый из исполнительных механизмов, приводят в действие пневматически. Это позволяет избежать использования гидравлической текучей среды, которая в случае утечек могла бы загрязнить птичник.
В варианте осуществления изобретения количество средств для захвата яиц из указанного ряда соответствует количеству яиц в одном или нескольких инкубационных лотках, в частности, в одном или двух инкубационных лотках, причем механизм перемещения выполнен с возможностью одновременного подъема каждого из яиц для закладки из каждого из инкубационных лотков.
Одновременный подъем яиц приводит к дополнительному выигрышу во времени во время укладывания яиц.
В варианте осуществления изобретения указанный ряд средств для захвата яиц содержит по меньшей мере 30, предпочтительно по меньшей мере 50, более предпочтительно по меньшей мере 100 и, в частности, 300 средств для захвата яиц.
Обеспечивая большее количество средств для захвата яиц на машине для транспортировки, ее производительность может быть увеличена таким образом, что за короткое время в бройлерном птичнике можно разместить необходимое количество яиц.
В варианте осуществления изобретения машина для транспортировки снабжена двигателем, выполненным с возможностью перемещения рамы по птичнику. В результате, работа машины для транспортировки может быть дополнительно автоматизирована, например, при обеспечении возможности ее независимого перемещения, что дает дополнительную экономию времени во время укладывания яиц, а также лишает человека необходимости катить машину для транспортировки.
В варианте осуществления изобретения механизм управления дополнительно выполнен с возможностью управления, после этапа с) и перед этапом d), указанным первым исполнительным механизмом для перемещения механизма перемещения вверх для подъема яиц для закладки, захваченных из указанных инкубационных лотков средствами для захвата яиц.
В этом варианте осуществления яйца также поднимают после захвата. В результате отсутствует риск того, что пустые инкубационные лотки на несущем механизме могут коснуться захваченных яиц, в то время как несущий механизм отодвигается из–под механизма перемещения, что могло бы повредить яйца.
Дополнительные преимущества и особенности изобретения станут очевидными из последующего описания предпочтительного варианта осуществления машины для транспортировки согласно изобретению. Однако это описание приведено только в качестве примера и не предназначено для ограничения объема защиты, определенного формулой изобретения.
Приведенные в описании ссылочные позиции относятся к прилагаемым чертежам, на которых:
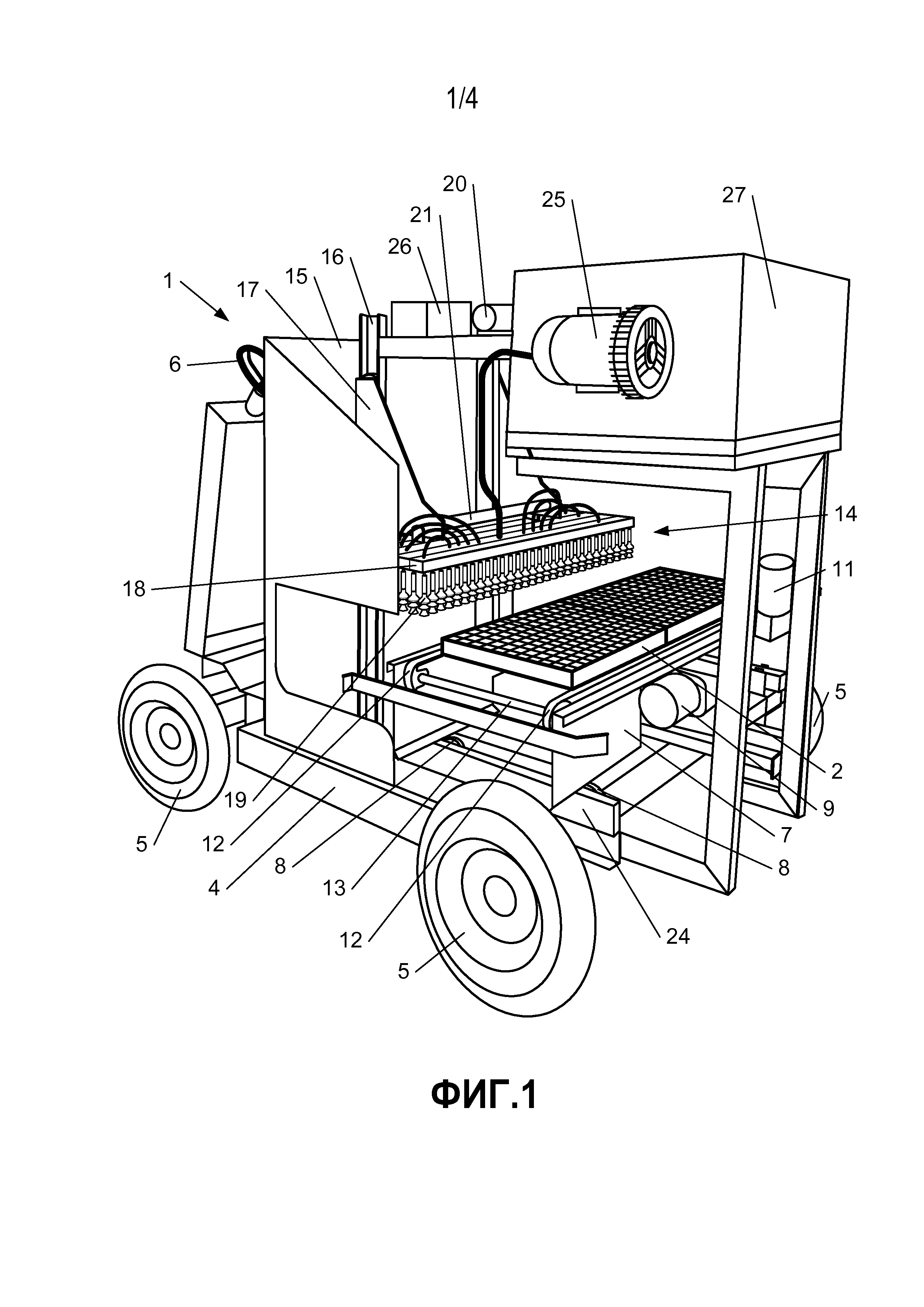
На Фиг.1 схематично представлен вид в перспективе машины для транспортировки согласно настоящему изобретению для перемещения яиц для закладки из инкубационных лотков на нанесенную полосу подстилки в птичнике;
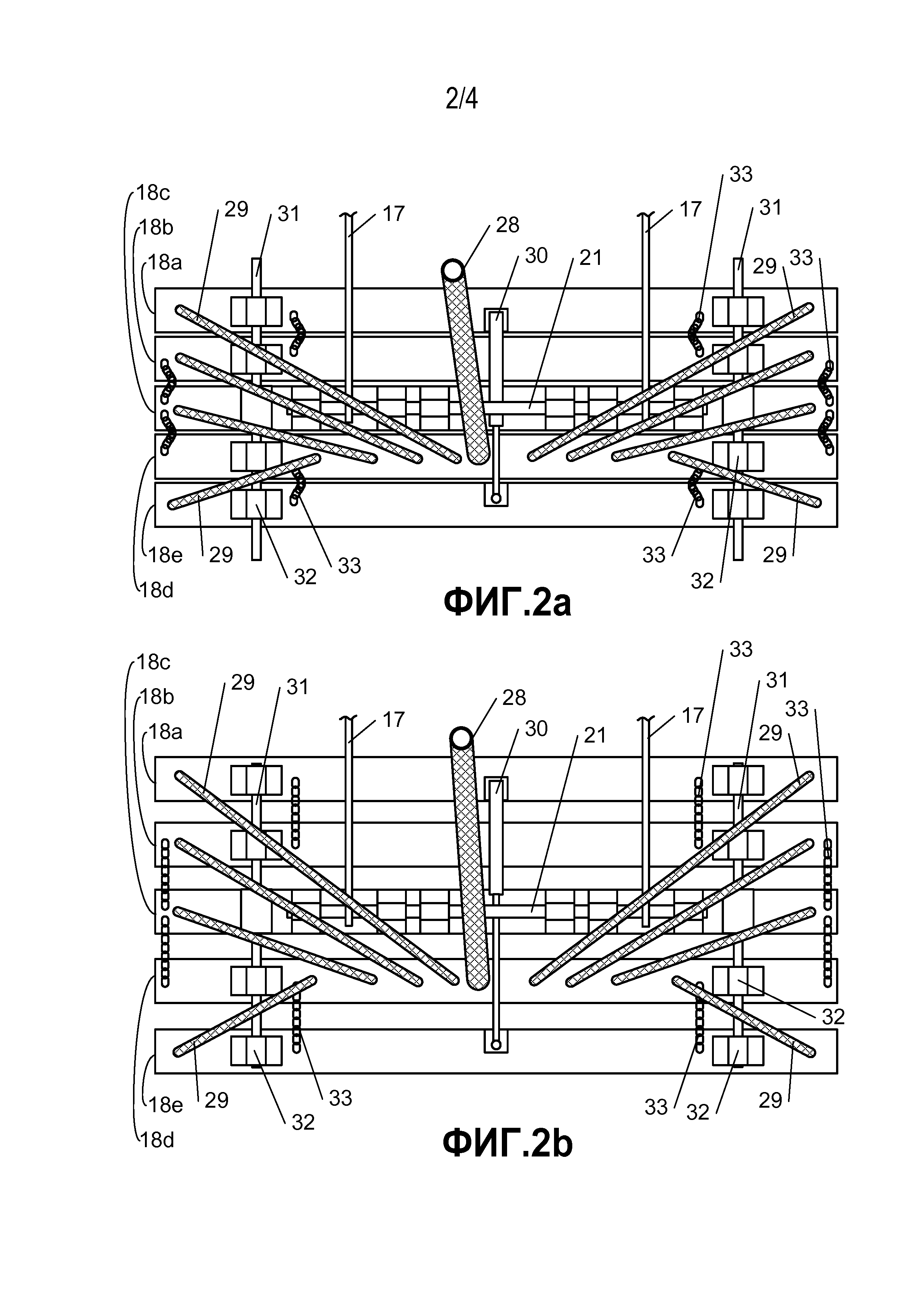
На Фиг.2а и 2b показан вид сверху корпуса механизма перемещения машины для транспортировки Фиг.1;
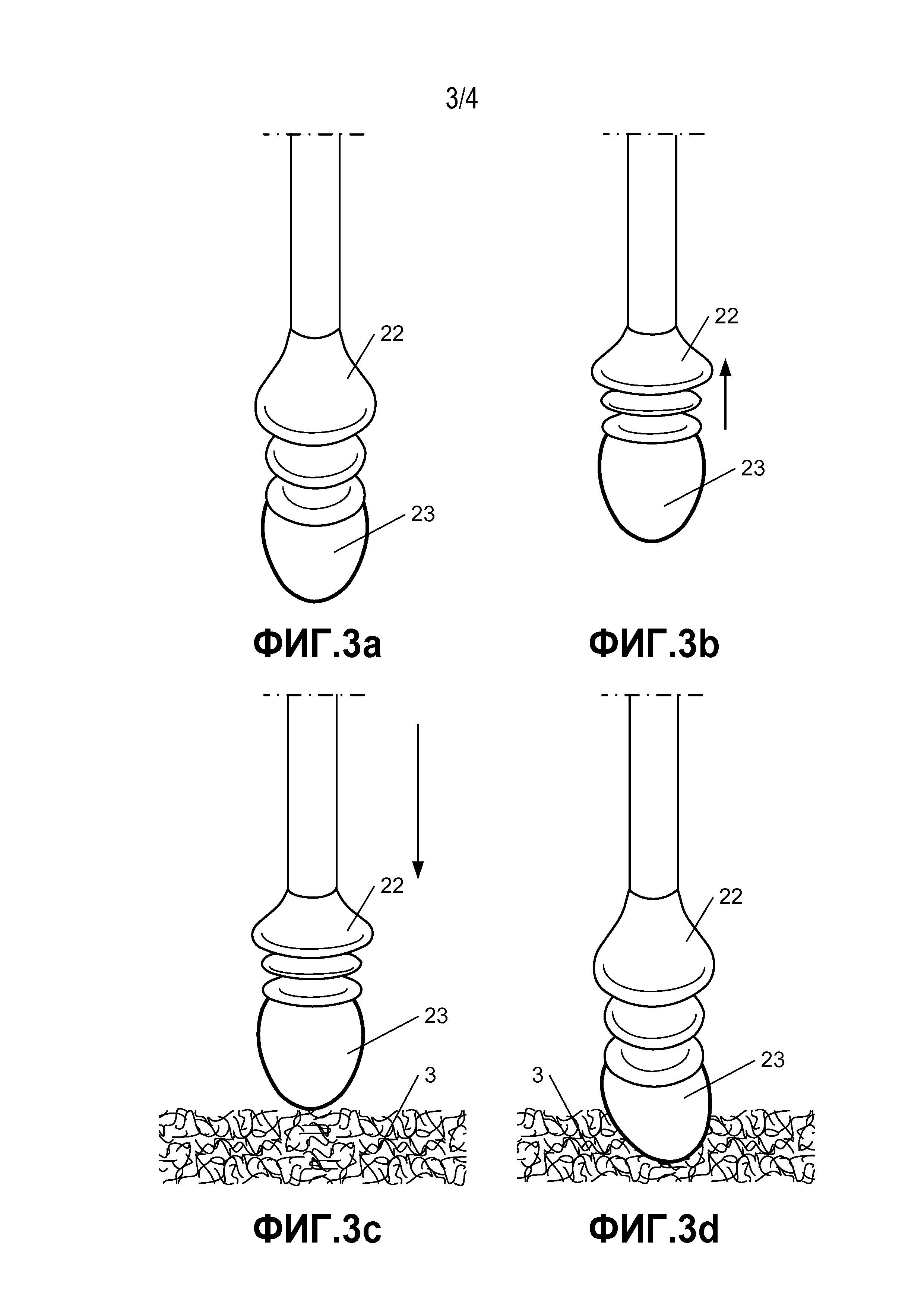
На Фиг.3а–3d показан вид в перспективе захвата одного яйца и расположения этого яйца на подстилке с помощью средства для захвата яиц механизма перемещения машины для транспортировки Фиг.1; а
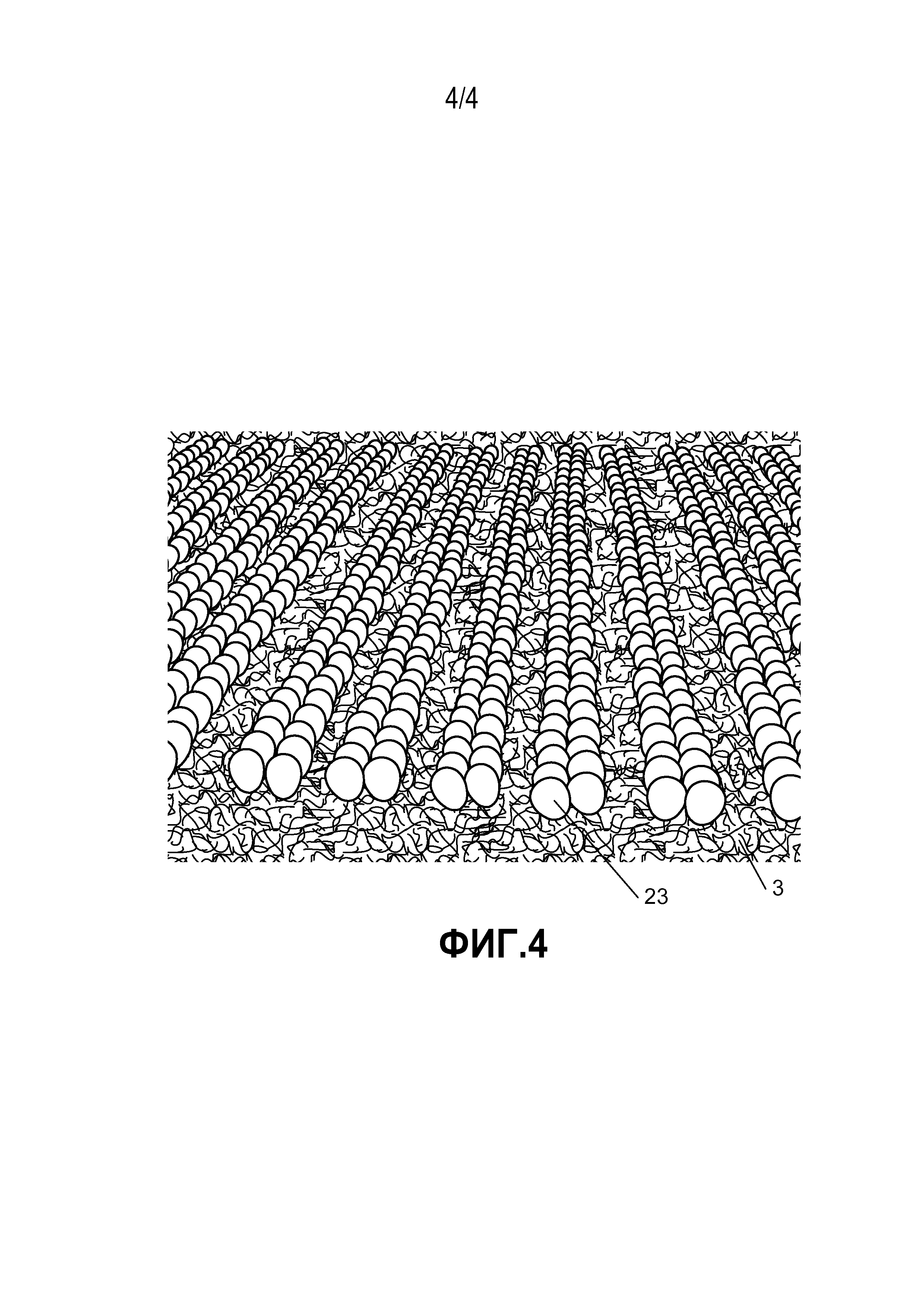
На Фиг.4 схематично представлен вид в перспективе части слоя подстилки с яйцами на нем, уложенными с помощью машины для транспортировки Фиг.1.
В общем, изобретение относится к машине 1 для транспортировки для перемещения на пол бройлерного птичника яиц, которые были уложены в инкубационных лотках 2. Для куриных яиц это происходит после того, как яйца были уложены, в течение примерно 18 дней. Поскольку первые цыплята будут вылупляться из яиц только через 19 дней, нет риска того, что цыплята вылупятся из яиц уже во время транспортировки или при перемещении в птичник. Машина 1 для транспортировки, согласно изобретению, может также быть использована для других яиц, например, яиц индеек, фазанов и тому подобных.
На практике существуют разные виды инкубационных лотков 2 для закладки куриных яиц. Примером этого является стандартный инкубационный лоток «Лоток B00568» от компании Petersime. Этот инкубационный лоток предназначен для 10 рядов по 15 яиц, то есть в общей сложности 150 яиц.
Для транспортировки яиц в бройлерный птичник инкубационные лотки 2 помещают в передвижные тележки, которые затем транспортируют с помощью грузовика. Преимущество транспортировки яиц с помощью инкубационных лотков 2 состоит в том, что не требуется никакого этапа перемещения, который всегда является причиной некоторого количества повреждений яиц.
В бройлерном птичнике предпочтительно предусмотрен слой материала 3 изоляционного покрытия (проиллюстрирован на Фиг. 3C, 3D и 4), на котором располагают яйца для закладки из инкубационных лотков 2 посредством машины 1 для транспортировки. Материал 3 изоляционного покрытия укладывают, в частности, в одну или несколько полос на полу бройлерного птичника. Материал 3 изоляционного покрытия может быть образован из мата, например, мата из пенопласта, но предпочтительно для этой цели используют подстилку, такую как, например, льняная солома, опилки, древесная стружка и тому подобное.
Если яйца расположены в одной или нескольких полосах на материале покрытия, предпочтительно снабдить яйца вдоль боковых сторон этих полос дополнительной изоляцией, путем предоставления большего количества материала покрытия вдоль этих боковых сторон. В случае подстилки она может быть досыпана вдоль боковых сторон, чтобы получить увеличение высоты. Это можно сделать после того, как яйца были перемещены, так что подстилка может быть сметена к внешнему ряду яиц.
Подстилка, которую помещают под яйца, не обязательно, но может быть такой же, как подстилка, которой покрыта оставшаяся часть пола птичника. Предпочтительно весь пол птичника сначала покрывают тонким слоем подстилки, после чего сверху наносят дополнительный слой подстилки (такой же или другой) или материал покрытия в местах, где будут расположены яйца.
Чтобы яйца оставались достаточно теплыми, слой материала 3 покрытия, нанесенный на пол птичника под яйцами, предпочтительно должен иметь среднюю толщину по меньшей мере 2 см, более предпочтительно по меньшей мере 3 см и наиболее предпочтительно по меньшей мере 4 см. После перемещения яиц на этот материал 3 покрытия может быть обеспечена дополнительная изоляция, например, путем покрытия яиц листом, таким как лист бумаги или пластиковая пленка. Также возможно, например, насыпать на яйца дополнительную подстилку. Однако использование листа имеет то преимущество, что его можно снова убрать, когда цыплята будут готовы вылупиться из яиц, так чтобы избежать слишком сильного повышения температуры яиц к моменту вылупления.
Чтобы регулировать температуру яиц, предпочтительно отслеживать количество яиц. Также температуру в птичнике можно отрегулировать до температуры яиц. Измерение температуры яичной скорлупы может быть выполнено вручную с помощью, например, инфракрасного термометра, но существуют также автоматические системы регулирования температуры яичной скорлупы, такие как система OvoScan™. В настоящее время ее используют для отслеживания и регулирования температуры в инкубаторах инкубаториев, и поэтому ее нужно только адаптирована к системе климат–контроля в бройлерном птичнике.
На Фиг.1 схематично показан вариант осуществления машины 1 для транспортировки, используемой для перемещения яиц. Эта машина 1 для транспортировки представляет собой машину с системой автоматического управления, снабженную рамой 4, на которой установлены колеса 5. Машина 1 для транспортировки предназначена для продвижения в бройлерном птичнике во время перемещения яиц. Для этого машина 1 для транспортировки снабжена двигателем (не показан), предпочтительно электрическим двигателем, для приведения в действие по меньшей мере одной из осей колес. Машина 1 для транспортировки также обеспечена рулевым устройством 6, которое позволяет регулировать направление перемещения.
В непоказанном варианте осуществления машину 1 для транспортировки также используют для размещения полосы или полос материала 3 покрытия, на котором будут укладывать яйца в птичнике. Благодаря этому птичник не нужно снабжать покрытием 3 заранее. С этой целью устройство (не показано) соединено с устройством 1 перемещения для нанесения материала 3 покрытия.
Если материал 3 покрытия представляет собой рулон пеноматериала, это может быть просто держатель, с помощью которого этот рулон раскатывают по полу птичника. Если материал 3 покрытия включает в себя подстилку, устройство представляет собой разбрасыватель, с помощью которого подстилку насыпают на пол птичника до требуемой толщины. Это делают, например, с помощью ротора, приводимого в действие колесами разбрасывателя. Предпочтительно, чтобы разбрасыватель имел устройство управления, с помощью которого можно регулировать количество насыпаемой подстилки на полу птичника. Например, это устройство управления может включать управляемое соединение между колесами разбрасывателя и ротором, с помощью которого можно регулировать соотношение между количеством оборотов колес и количеством оборотов ротора.
Сверху машины 1 для транспортировки предусмотрен несущий механизм 7, который установлен с возможностью скольжения на раме 4 с помощью ряда колес 8, которые едут по рельсовой направляющей 16. Таким образом, весь несущий механизм 7 может перемещаться на раме 4 вперед и назад. На машине 1 для транспортировки также предусмотрен исполнительный механизм 9 для несущего механизма 7, так что весь несущий механизм 7 можно перемещать. Предпочтительно, предусмотрен датчик (не показан) для определения края несущего механизма 7. Затем эту информацию от датчика используют для исполнительного механизма 9 до тех пор, пока край несущего механизма 7 не окажется в заранее заданном положении, причем указанное положение, как описано ниже, определяют на основе положения средств для захвата яиц.
Несущий механизм 7 снабжен транспортировочным механизмом, на котором оператор машины 1 должен разместить один или несколько инкубационных лотков 2. Транспортировочный механизм приводят в действие с помощью исполнительного механизма 11, предпочтительно электрического двигателя. С помощью этого транспортировочного механизма инкубационные лотки 2 располагают в корректном положении на машине 1. В частности, предусмотрен датчик (не показан), который определяет положение края инкубационного лотка 2. Затем эту информацию от датчика используют для приведения в действие исполнительного механизма 11 до тех пор, пока край инкубационного лотка 2 не окажется в заранее заданном положении, причем указанное положение, как описано ниже, определяют на основе положения средств для захвата яиц.
Как показано на Фиг.1, транспортировочный механизм образован двумя противоположно расположенными лентами 12, на которых поддерживают противоположные стороны инкубационных лотков 2. Ленты 12 вращаются вокруг оси 13 колеса, приводимой в действие исполнительным механизмом 11. Предпочтительно, исполнительный механизм 11 может работать в двух разных направлениях, тем самым подталкивая пустые инкубационные лотки 2 назад к оператору машины 1.
Очевидно, что две противоположно направленные ленты 12 также могут быть заменены другими транспортировочными механизмами, такими как конвейерная лента или роликовый конвейер.
На раме 4 также предусмотрен механизм 14 перемещения, который установлен с возможностью перемещения вверх и вниз на раме 4. В частности, как показано на Фиг.1, вертикальная стенка 15 снабжена двумя рельсовыми направляющими 16 на ней, на которых один опорный элемент 17 установлен с возможностью скольжения на каждой из них. Рядом с концами опорных элементов 17 прикреплен корпус 18, в частности, с помощью поперечной балки 21, на которой установлены средства 19 для захвата яиц. На стенке 15 также предусмотрен исполнительный механизм 20 для перемещения вверх и вниз корпуса 18, и, таким образом, также средств 19 для захвата яиц. С помощью этих средств 19 для захвата яиц яйца поднимают из инкубационных лотков 1 и затем помещают на материал 3 покрытия путем перемещения всего корпуса 18 вверх и вниз.
Для захвата яиц предусмотрен исполнительный механизм в форме вакуумного насоса 25 для отсасывания воздуха из средств 19 для захвата яиц, когда они расположены напротив яиц, как более подробно описано ниже со ссылкой на Фиг.3а–3d. Если предусмотрены средства 19 для захвата яиц с целью захвата яиц механическими средствами, вакуумный насос 25 может быть заменен исполнительным механизмом другого типа, например, электрическим двигателем, для приведения в действие механических средств.
В альтернативном варианте осуществления несущий механизм 7 может быть расположен сбоку рядом с механизмом 14 перемещения. Однако предпочтительно размещать несущий механизм 7 в направлении перемещения за механизмом 14 перемещения, как показано на Фиг.1. Это, в частности, является более надежным вариантом по сравнению с прикрепленным сбоку несущим механизмом 7. Также возможно разместить несущий механизм 7 в направлении перемещения перед механизмом 14 перемещения.
На Фиг.2а и 2b показаны детали корпуса 18, на котором предусмотрены средства 19 для захвата яиц. В частности, корпус 18 состоит из пяти отдельных ящиков 18a, 18b, 18c, 18d, 18e, которые соединены между собой двумя соединительными штоками 31 и одним соединительным элементом 32 на каждый соединительный шток 31 для ящиков 18a, 18b, 18c, 18d, 18e. На каждом из этих ящиков 18a, 18b, 18c, 18d, 18e предусмотрены два ряда со средствами 19 для захвата яиц, как показано на Фиг.1. Ящик 18c жестко прикреплен к опорным элементам 17 в рельсовых направляющих 16 на вертикальной стенке 15. Благодаря соединительным штокам 31 и соединительным элементам 32 ящики 18a, 18b, 18d, 18e подвергаются тому же вертикальному смещению, что и ящик 18c. Очевидно, что можно использовать различное количество соединительных штоков 31, например, только один, для соединения вместе ящиков 18a, 18b, 18c, 18d, 18e.
Вакуумный насос 25 соединен с ящиком 18d через основной шланг, и из ящика 18d в каждый ящик 18а, 18b, 18с, 18е проходят две распределительные трубки 29. Другими словами, каждый ящик 18a, 18b, 18c, 18d, 18e действует как вакуумный резервуар с вакуумным насосом, работающим непосредственно только на одном из ящиков 18a, 18b, 18c, 18d, 18e. При необходимости для каждого ящика 18a, 18b, 18c, 18e также возможно иметь только один распределительный шланг 29, но это снижает скорость, с которой яйца могут быть захвачены средствами 19 для захвата яиц. Аналогично, для каждого ящика 18a, 18b, 18c, 18e может быть предусмотрено более двух распределительных шлангов 29, так что необходимое отрицательное давление для захвата яиц достигают быстрее.
Как показано на Фиг.2а и 2b, ящики 18а, 18b, 18с, 18d, 18е имеют два разных положения между собой. На Фиг.2а ящики 18a, 18b, 18c, 18d, 18e находятся в своем закрытом положении, причем расстояние между ящиками 18a, 18b, 18c, 18d, 18e выбирают таким, чтобы расстояние между средствами 19 для захвата яиц соответствовало расстоянию между яйцами в инкубационных лотках 2; т.е. размер инкубационных лотков 2 определяет расположение средств 19 для захвата яиц и ящиков 18a, 18b, 18c, 18d, 18e.
На Фиг.2b ящики 18a, 18b, 18c, 18d, 18e отодвинуты, причем каждая пара рядов средств 19 для захвата яиц отделена на определенном расстоянии друг от друга. Другими словами, если яйца захватывают с помощью средств 19 захвата яиц, можно отодвинуть их попарно друг от друга. Таким образом, в частности, можно расположить яйца на большем расстоянии друг от друга на материале 3 покрытия, так чтобы повышение температуры яиц можно было лучше контролировать к моменту вылупления.
Чтобы отодвинуть ящики 18a, 18b, 18c, 18d, 18e друг от друга предусмотрен поршневой механизм 30, который приводят в действие исполнительным механизмом 26, установленным на вертикальной стенке 15, как показано на Фиг.1. Этот поршневой механизм 30 прикреплен и к ящику 18а, и к ящику 18е, и передвигает их друг от друга или навстречу друг другу. На конце соединительного штока 31 имеется упор, который определяет максимальное расстояние между ящиками 18а, 18е. Предпочтительно этот упор является регулируемым, чего можно легко достигнуть, сделав упор в виде штифта, который может быть размещен во множестве отверстий в соединительном штоке 31. Между каждыми двумя соседними ящиками 18а, 18b, 18с, 18d, 18e предусмотрена цепь 33. Эти цепи 33 гарантируют, что ящики 18b, 18c, 18d отодвинутся, когда ящики 18a, 18e будут смещены относительно друг друга. Кроме того, эти цепи 33 также определяют максимально выдвинутое положение корпуса 18. Другими словами, заменяя эти цепи 33 более длинными или более короткими цепями, также можно регулировать взаимное максимальное расстояние между ящиками 18a, 18b, 18c, 18d, 18e.
Следует понимать, что корпус 18 не должен состоять из разных частей, подвижных относительно друг друга, а что цельный корпус 18 также можно использовать для укладывания яиц в птичнике, причем цельный корпус 18 также образует отдельный вакуумный резервуар для средств 19 для захвата яиц.
Как показано на Фиг.1, машина 1 для транспортировки снабжена передвижным электрическим генератором 27, установленным на раме 4 и предназначенным для подачи питания на разные исполнительные механизмы 9, 11, 20, 25, 26. Такой электрический генератор 27 преодолевает недостатки, связанные с подачей питания от батареи, которое, конечно, ограниченно. Также нет необходимости обеспечивать подключение к внешней сети электропитания, в случае чего в птичнике нужно проложить кабели.
В предпочтительном варианте осуществления электрический генератор 27 можно отсоединить от рамы 4. Таким образом, электрический генератор 27 можно очищать отдельно, что облегчает техническое обслуживание и, таким образом, снижает риск загрязнения.
Кроме того, машина 1 для транспортировки также снабжена механизмом управления (не показан) для управления работой различных компонентов, таких как исполнительные механизмы 9, 11, 20, 25, 26. Очевидно, что один или несколько исполнительных механизмов 9, 11, 20, 25, 26 также могут быть объединены в одном или нескольких объединенных исполнительных механизмах.
В показанном варианте осуществления оператор машины 1 для транспортировки начинает с размещения одного инкубационного лотка 2, заполненного яйцами, на несущем механизме 7. Транспортировочный механизм, то есть ленты 12 с исполнительным механизмом 11, перемещают размещенный инкубационный лоток 2 таким образом, чтобы оператор мог разместить второй инкубационный лоток 2 рядом с уже размещенным инкубационным лотком 2 на несущем механизме 7. После того, как оба инкубационных лотка 2 размещены, транспортировочный механизм переместит инкубационные лотки 2 в заранее заданное боковое положение, причем яйца и средства 19 для захвата яиц находятся на одной боковой линии относительно друг друга. После этого весь несущий механизм 7 перемещается вперед под механизм 14 перемещения, в частности, в заранее заданное положение вперед, где яйца и средства 19 для захвата яиц находятся на одной и той же прямой линии относительно друг друга. Корпус 18 со средствами 19 для захвата яиц затем опускают до тех пор, пока средства 19 для захвата яиц не коснутся яиц в инкубационных лотках 2, после чего яйца захватывают, как более подробно описано ниже со ссылкой на Фиг.3а–3d. Корпус 18 со средствами 19 для захвата яиц затем перемещают вверх, так что яйца поднимают из инкубационных лотков 2, но предпочтительно этот подъем яиц происходит за счет их захвата, так что не нужно поднимать корпус 18 полностью. Теперь весь несущий механизм 7 может быть перемещен назад, так что путь будет свободен для перемещения корпуса 18 со средствами 19 для захвата яиц и яйцами до тех пор, пока яйца не будут расположены рядом с полом, в частности, рядом с покрытием 3 пола птичника. Затем яйца высвобождают, как более подробно описано ниже со ссылкой на Фиг.3а–3d. При размещении яиц на материале 3 покрытия машину 1 для транспортировки предпочтительно останавливают так, чтобы иметь возможность размещать яйца на материале 3 покрытия как можно осторожнее. После этого корпус 18 снова поднимают. Предпочтительно, пустые инкубационные лотки 2 также удаляют из несущего механизма 7, что может быть сделано вручную или с помощью транспортировочной системы. Таким образом, во время всего этого инкубационные лотки 2 не соприкасаются с птичником или с размещенной в нем подстилкой, так что нет риска загрязнения инкубационных лотков.
На Фиг.3а и 3 показаны подробности касаемо средств 19 для захвата яиц и их работы, т.е. захвата яиц из инкубационного лотка 2 и расположения яиц в покрытии 3. Конкретно, они выполнены в качестве присосок 22, в которые помещается верхняя часть одного яйца, как показано на Фиг.3а. На практике такие средства 19 для захвата яиц уже используют в стационарных машинах для транспортировки, используемых в инкубаториях, для перемещения яиц для закладки из инкубационных лотков 2 в выводковые лотки. Примером этого является «Машина для перемещения от Petersime», которая имеет 150 присосок, что позволяет ей перемещать 150 яиц из одного инкубационного лотка в выводковый лоток за один раз.
Когда присоски 22 входят в контакт с их соответствующим яйцом 23, активируют вакуумный насос 25, который отсасывает воздух из пространства внутри присосок 22. В результате яйца всасывают, как показано черной стрелкой на Фиг.3b. На этой фигуре также видно, что при всасывании яиц присоски 22 сжимаются, что обеспечивает частичный подъем яиц из инкубационных лотков 2. Для специалиста в данной области техники будет очевидно, что в непоказанном варианте осуществления яйца могут быть даже полностью подняты из их инкубационного лотка 2 посредством эффекта всасывания присосок, что приводит к экономии времени.
Опуская весь корпус 18, как описано выше, яйца перемещают чуть выше покрытия 3, как показано на Фиг.3с, причем опускание обозначено черной стрелкой. При выключении вакуумного насоса 25 воздух снова вводят в присоску 22, в результате чего присоска снова расширяется до своей первоначальной формы. В результате яйцо частично проталкивают в покрытие 3, как показано на Фиг.3d. Это выгодно для изоляции яиц. Это также достигают автоматически, без необходимости введения таких полостей заранее.
В предпочтительном варианте осуществления также возможно, что вакуумный насос 25 может нагнетать воздух в направлении корпуса 18 и, таким образом, в направлении присосок 22. Другими словами, вакуумный насос является реверсивным и может одновременно нагнетать воздух и откачивать воздух. Таким образом, во время размещения яиц в покрытии 3 возможно позволить вакуумному насосу нагнетать воздух. Прежде всего, это будет гарантировать, что присоски 22 высвободят яйца быстрее, так что вся работа машины 1 для транспортировки ускорится. Кроме того, этот воздушный поток также будет способствовать проталкиванию яиц в покрытие 3. При необходимости можно использовать только воздушный поток для проталкивания яиц в покрытие 3.
В качестве альтернативы, можно только размещать яйца на покрытии 3, не проталкивая их в него. Это может быть особенно выгодным, если материал 3 покрытия включает в себя рулон пеноматериала, который раскатывают по полу птичника, который уже может быть заранее снабжен полостями для яиц. Таким образом, яйца должным образом изолированы и не должны быть вдавлены в покрытие 3.
Следует понимать, что присоски 22 также могут быть заменены механическими захватами, как описано в EP 3 044 097. Здесь, при необходимости, механические захваты также могут размещать яйца в покрытии 3, проталкивая яйца в покрытие 3, в то время как они все еще захвачены, и только тогда высвобождают их. Тем не менее, присоски предпочтительнее механических захватов, потому что они несут наименьший риск повреждения яиц.
На Фиг.4 показан окончательный результат перемещения яиц 23 из инкубационных лотков 2 в покрытие 3 на полу птичника. Как можно видеть, яйца 23 расположены в рядах попарно с некоторым более открытым пространством между парами рядов, что является результатом перемещения различных частей корпуса 18 друг от друга, как описано выше. Таким образом, в частности, можно расположить яйца на большем расстоянии друг от друга на материале 3 покрытия, так что повышение температуры яиц можно будет лучше регулировать к моменту вылупления.
Вышеописанная машина 1 для транспортировки позволяет помещать яйца в любое место птичника. Для того, чтобы снизить затраты на отопление, предпочтительно заранее определить, где в птичнике жарче всего. Это может зависеть от системы отопления, а также от направления ветра. На основании измеренных температур можно определить, где будут укладывать яйца, а именно в том месте, где температура является максимально оптимальной для вылупления цыплят из яиц. Обычно это должно быть самое жаркое место в птичнике, если не требуется охлаждение в птичнике, что, однако, было бы скорее исключением.
Хотя аспекты настоящего изобретения были описаны в отношении конкретных вариантов осуществления, специалистам в данной области техники должно быть очевидно, что эти аспекты могут также применены на практике в других формах.
Реферат
Изобретение относится к машине для транспортировки для укладывания яиц на полу в птичнике, причем указанные яйца находятся в инкубационных лотках, в которые они были уложены. Машина (1) для транспортировки содержит раму, выполненную с возможностью катить ее по птичнику (4), и несущий механизм (7), установленный на раме (4) и выполненный с возможностью переноса по меньшей мере одного из инкубационных лотков (2) с яйцами (23) для закладки. Машина также содержит механизм (14) перемещения, прикрепленный к раме (4), имеющий ряд средств (19) для захвата яиц, каждое из которых выполнено с возможностью захвата одного из яиц (23) для закладки. Причем механизм (14) перемещения выполнен с возможностью подъема яиц (23) для закладки из инкубационных лотков (2) и размещения яиц (23) для закладки на полу. Механизм (14) перемещения установлен с возможностью перемещения на раме (4) вверх и вниз по заранее заданному пути между верхним положением и нижним положением. Несущий механизм (7) установлен с возможностью перемещения на раме (4) между внешним положением, в котором несущий механизм (7) находится вне пути механизма (14) перемещения, и внутренним положением, в котором несущий механизм (7) расположен на пути механизма (14) перемещения. При этом машина (1) для транспортировки дополнительно содержит первый исполнительный механизм (20), выполненный с возможностью перемещения механизма (14) перемещения вверх и вниз, второй исполнительный механизм (9), выполненный с возможностью перемещения несущего механизма (7) вперед и назад, и третий исполнительный механизм (25), выполненный с возможностью приведения в действие средств (19) для захвата яиц. Машина (1) также дополнительно содержит механизм управления, выполненный с возможностью: а) управления вторым исполнительным механизмом (9) для перемещения несущего механизма (7) из его внешнего положения в его внутреннее положение; b) управления первым исполнительным механизмом (20) для перемещения механизма (14) перемещения вниз к яйцам (23) для закладки, расположенным в инкубационных лотках (2) на несущем механизме (7); c) управления третьим исполнительным механизмом (25) для захвата яиц (23) для закладки с помощью средств (19) для захвата яиц; d) управления вторым исполнительным механизмом (9) для перемещения несущего механизма (7) из его внутреннего положения в его внешнее положение; е) управления первым исполнительным механизмом (20) для перемещения механизма (14) перемещения вниз по направлению к полу вдоль пути; f) управления третьим исполнительным механизмом (25) для высвобождения яиц (23) для закладки из средств (19) для захвата яиц, чтобы разместить их на полу; g) управления первым исполнительным механизмом (20) для перемещения механизма (14) перемещения вверх в его верхнее положение. Достигаемый при этом технический результат заключается в увеличении производительности без увеличения риска дополнительной потери яиц. 17 з.п. ф-лы, 8 ил.
Комментарии