Устройство управления крутящим моментом и бесконтактная система зарядки - RU2561887C2
Код документа: RU2561887C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству управления крутящим моментом и бесконтактной системе зарядки.
УРОВЕНЬ ТЕХНИКИ
[0002] В бесконтактном устройстве источника подачи электрической мощности, имеющем катушку передачи электрической мощности и катушку приема электрической мощности, причем эти катушки располагаются напротив друг друга через зазор, сформированный с предварительно определенным расстоянием, имеют предварительно определенные диаметры и формы и образуют идентичные конструкции симметрично относительно направлений вверх и вниз во время подачи электрической мощности, электрическое автомобильное транспортное средство, которое является стороной приема электрической мощности, включает в себя контроллер зарядки и батарею, причем батарея заряжается согласно подаче электрической мощности из катушки передачи электрической мощности в катушку приема электрической мощности, как раскрыто в патентном документе 1.
[0003] Тем не менее, существует такая проблема, что когда транспортное средство паркуется в месте парковки в целях зарядки, трудно выполнять позиционирование между катушкой приема электрической мощности на стороне транспортного средства и катушкой передачи электрической мощности на стороне земли.
[0004] Задача, которая должна разрешаться посредством настоящего изобретения, состоит в том, чтобы предоставлять устройство управления крутящим моментом, которое упрощает позиционирование между позицией транспортного средства и предварительно определенной позицией парковки, когда транспортное средство паркуется.
ПРЕДВАРИТЕЛЬНО ОПУБЛИКОВАННЫЕ ДОКУМЕНТЫ
[0005] Патентный документ 1. Первая публикация заявки на патент (Япония) № 2008-288889.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
[0006] Вышеописанная задача может разрешаться посредством коррекции крутящего момента в соответствии с относительной позицией между предварительно определенной позицией парковки и позицией транспортного средства, и транспортное средство приводится в движение согласно скорректированному крутящему моменту.
[0007] Согласно настоящему изобретению, когда транспортное средство приближается к предварительно определенной позиции парковки, корректируется крутящий момент. Таким образом, может упрощаться точное перемещение транспортного средства согласно операции приведения в движение, так что в результате этого может упрощаться позиционирование между предварительно определенной позицией парковки и позицией транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 является блок-схемой бесконтактной системы зарядки, связанной с предпочтительным вариантом осуществления согласно настоящему изобретению.
Фиг. 2A является видом сверху и видом в перспективе, причем каждый вид представляет то, что первичная и вторичная обмотки, показанные на фиг. 1, располагаются напротив друг друга.
Фиг. 2B является видом сверху и видом в перспективе, причем каждый вид представляет то, что первичная и вторичная обмотки, показанные на фиг. 1, располагаются напротив друг друга и отклоняются к направлению по оси X.
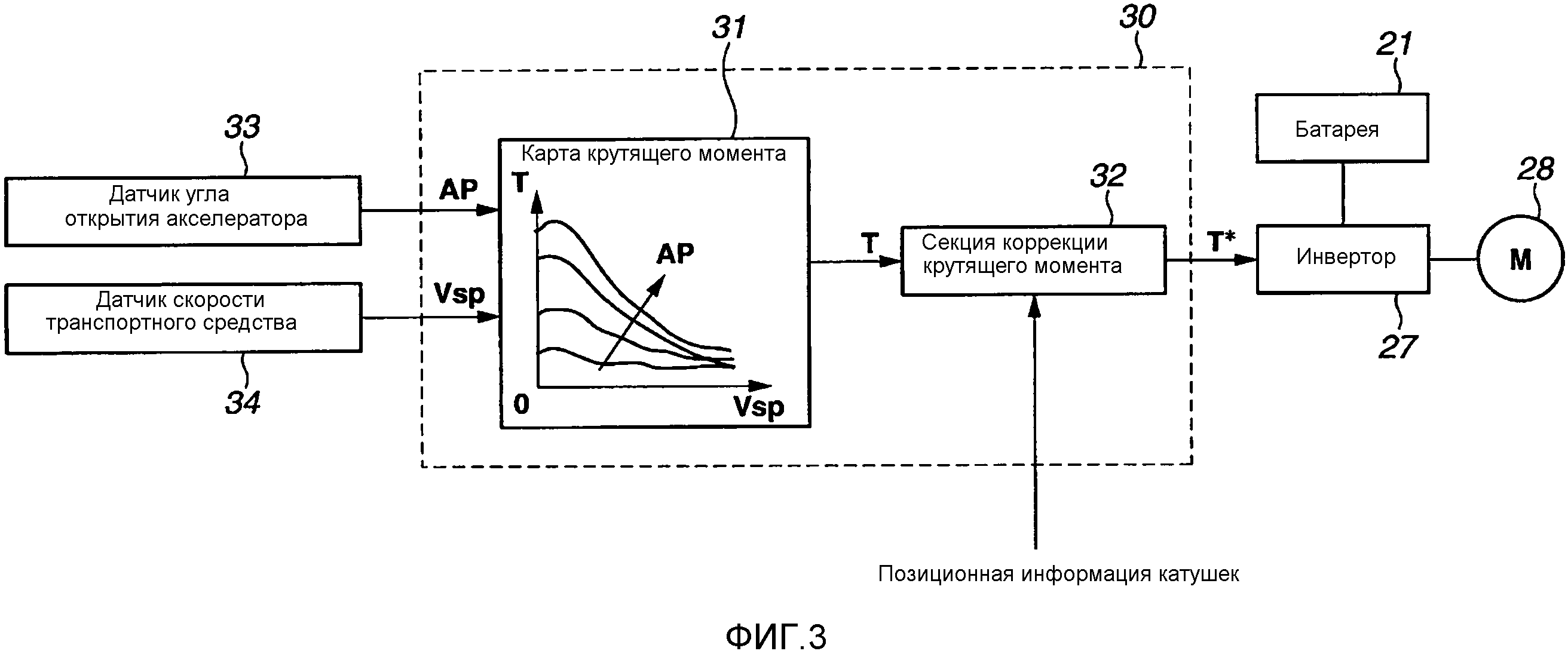
Фиг. 3 является блок-схемой устройства управления крутящим моментом, включенного в транспортное средство, в котором монтируется бесконтактная система зарядки, показанная на фиг. 1.
Фиг. 4 является картой крутящего момента устройства управления крутящим моментом, показанного на фиг. 3, и является графиком, представляющим характеристику крутящего момента (T) относительно скорости (VSP) транспортного средства.
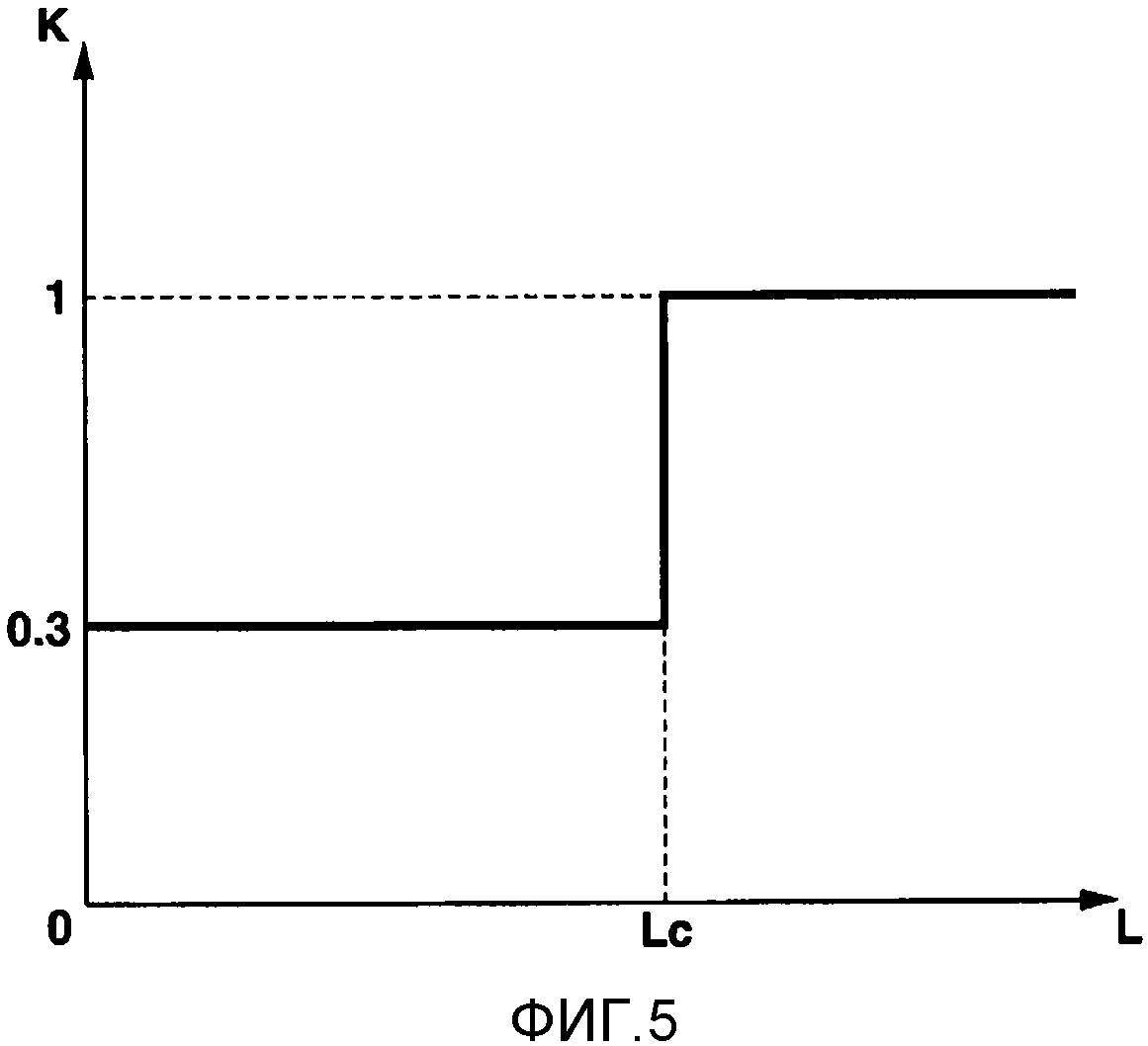
Фиг. 5 является графиком, представляющим характеристику (поправочного) коэффициента (K) коррекции относительно расстояния (L) между катушкой приема электрической мощности и катушкой передачи электрической мощности в секции коррекции крутящего момента устройства управления крутящим моментом, показанного на фиг. 3.
Фиг. 6 является блок-схемой последовательности операций способа, представляющей управляющую процедуру устройства управления крутящим моментом, показанного на фиг. 3.
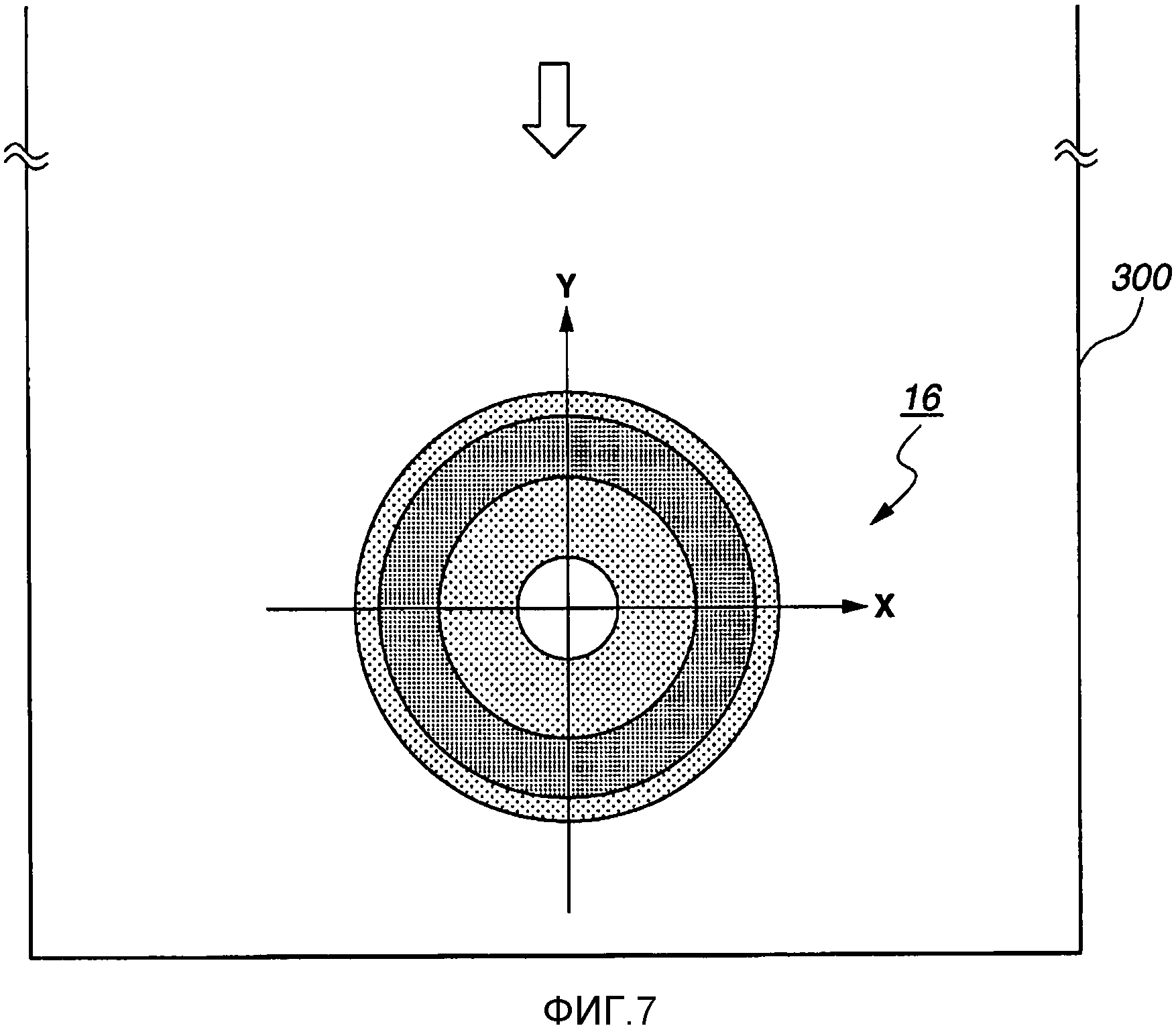
Фиг. 7 является пояснительным видом места парковки транспортного средства в бесконтактной системе зарядки в другом предпочтительном варианте осуществления согласно настоящему изобретению.
Фиг. 8 является графиком, представляющим характеристику коэффициента (K) коррекции относительно расстояния (L) между катушкой приема электрической мощности и катушкой передачи электрической мощности в секции коррекции крутящего момента устройства управления крутящим моментом в другом предпочтительном варианте осуществления согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] В дальнейшем в этом документе поясняются предпочтительные варианты осуществления согласно настоящему изобретению на основе чертежей.
[0010] Фиг. 1 является блок-схемой транспортного средства, включающего в себя устройство управления крутящим моментом в предпочтительном варианте осуществления согласно настоящему изобретению, и бесконтактной системы зарядки, имеющей устройство 100 зарядки.
Следует отметить, что устройство управления крутящим моментом в этом варианте осуществления монтируется в электрическом автомобильном транспортном средстве, но может монтироваться в таком транспортном средстве, как гибридное транспортное средство и т.п.
[0011] Как показано на фиг. 1, бесконтактная система зарядки в этом варианте осуществления включает в себя: транспортное средство 200 в качестве модуля на стороне транспортного средства; и устройство 100 зарядки, которое служит в качестве модуля на стороне земли. Бесконтактная система зарядки является системой, в которой электрическая мощность подается бесконтактно из устройства 100 зарядки, установленного в станции подачи электрической мощности и т.п., чтобы заряжать батарею 21, которая устанавливается в транспортном средстве 200.
[0012] Устройство 100 зарядки включает в себя: источник 11 подачи электрической мощности переменного тока; преобразователь 12; секцию 13 управления зарядкой; секцию 14 обнаружения позиции; секцию 15 связи; и катушку 16 передачи электрической мощности. Устройство 100 зарядки устанавливается в месте парковки для парковки транспортного средства 200, и является модулем на стороне земли, чтобы подавать электрическую мощность между катушками бесконтактно, когда транспортное средство 200 паркуется в предварительно определенной позиции парковки.
[0013] Преобразователь 12 является устройством преобразования электрической мощности, чтобы преобразовывать электрическую мощность переменного тока, поданную из источника 11 подачи электрической мощности переменного тока, в переменный ток высокой частоты, чтобы подавать электрическую мощность в катушку 16 передачи электрической мощности. Секция 15 связи осуществляет беспроводную связь с секцией 25 связи на стороне 200 транспортного средства для того, чтобы выполнять передачу или прием информации. Секция 15 связи передает сигнал, например, с целью начала подачи электрической мощности из устройства 100 зарядки, в секцию 25 связи либо принимает сигнал из секции 25 связи с целью, со стороны транспортного средства 200, приема электрической мощности из устройства 100 зарядки. Секция 14 обнаружения позиции периодически обнаруживает позицию катушки 26 приема электрической мощности транспортного средства 200, которое должно быть припарковано в предварительно определенной позиции парковки. Секция 14 обнаружения позиции, например, передает сигнал в форме инфракрасного сигнала или ультразвукового волнового сигнала и обнаруживает позицию согласно варьированию сигнала.
[0014] Секция 13 управления зарядкой управляет устройством 100 зарядки посредством управления преобразователем 12, секцией 14 обнаружения позиции и секции 15 связи таким образом, чтобы управлять устройством 100 зарядки. Секция 13 управления зарядкой управляет преобразователем 12 таким образом, чтобы управлять электрической мощностью, выведенной из катушки 16 передачи электрической мощности в катушку 26 приема электрической мощности. Секция 13 управления зарядкой передает управляющий сигнал, связанный с зарядкой, из секции 15 связи в секцию 25 связи, и управляет секцией 14 обнаружения позиции таким образом, чтобы обнаруживать относительную позицию катушки 26 приема электрической мощности по отношению к катушке 16 передачи электрической мощности.
[0015] Катушка 16 передачи электрической мощности устанавливается в месте парковки, имеющем бесконтактную систему зарядки в этом варианте осуществления. Когда транспортное средство 200, имеющее модуль на стороне транспортного средства 200 в бесконтактной системе зарядки, паркуется в предварительно определенной позиции парковки, катушка 16 передачи электрической мощности находится с нижней части катушки 26 приема электрической мощности и размещается с поддержанием расстояния до катушки 26 приема электрической мощности. Катушка 16 передачи электрической мощности является круглой катушкой, параллельной поверхности места парковки.
[0016] Транспортное средство 200 включает в себя: батарею 21; преобразователь 22; секцию 23 управления зарядкой; выпрямительную схему 24; секцию 25 связи; катушку 26 приема электрической мощности; инвертор 27; электромотор 28; и EV-контроллер 30. Катушка 26 приема электрической мощности располагается между задними ходовыми колесами с нижней поверхностью (ходовой частью) транспортного средства 200. Затем, когда транспортное средство 200 паркуется в предварительно определенной позиции парковки, катушка 26 приема электрической мощности размещается в верхней части катушки 16 передачи электрической мощности и размещается с поддержанием расстояния до катушки 16 передачи электрической мощности.
Катушка 26 приема электрической мощности является катушкой, имеющей круглую форму, параллельной поверхности места парковки. Выпрямительная схема 24 выпрямляет электрическую мощность переменного тока, принимаемую посредством катушки 26 приема электрической мощности, в электрическую мощность постоянного тока. Преобразователь 22 является преобразователем постоянного тока, чтобы преобразовывать электрическую мощность постоянного тока, выпрямленную посредством выпрямительной схемы 26, в постоянный ток, подходящий для зарядки батареи 21. Помимо этого, преобразователь 22 включает в себя: батарею 21; преобразователь 22, который предоставляет схему зарядки; распределительную коробку (не показана), имеющую переключатель для того, чтобы электрически отсоединять выпрямительную схему 24 и катушку 26 приема электрической мощности. Распределительная коробка управляется посредством секции 23 управления зарядкой.
[0017] Батарея 21 сконструирована посредством соединения множества вторичных элементов (батареи) и предоставляет источник подачи электрической мощности для транспортного средства 200. Инвертор 27 является схемой управления для того, чтобы преобразовывать электрическую мощность постоянного тока, выведенную из батареи 21, в электрическую мощность переменного тока и подавать электрическую мощность в электромотор 28. Электромотор 28 сконструирован, например, посредством электромотора трехфазного переменного тока и предоставляет источник приведения в движение, чтобы приводить в движение транспортное средство 200.
[0018] Секция 25 связи осуществляет беспроводную связь с секцией 15 связи на стороне земли для того, чтобы выполнять передачу или прием информации. Секция 23 управления зарядкой управляет батареей 21, преобразователем 22, выпрямительной схемой 24 и секцией 25 связи в ходе зарядки. Помимо этого, секция 23 управления зарядкой подключается к EV-контроллеру 30 через сеть CAN-связи и выполняет передачу или прием информационных сигналов. Секция 23 управления зарядкой выполняет передачу или прием управляющих сигналов, связанных с зарядкой, в секцию 13 управления зарядкой через секцию 15 связи и секцию 25 связи, с тем чтобы управлять бесконтактной системой зарядки в этом варианте осуществления. Секция 23 управления зарядкой управляет, в то время когда выполняется процесс зарядки, распределительной коробкой, включенной в преобразователь 22, таким образом, что образуется электропроводность из катушки 26 приема электрической мощности в батарею 21 через выпрямительную схему 24 и преобразователь 22. Таким образом, электрическая мощность, передаваемая из катушки 16 передачи электрической мощности, подается в батарею 21, чтобы заряжать батарею 21. EV-контроллер 30 является секцией управления для того, чтобы управлять всем транспортным средством 200, задает крутящий момент для того, чтобы приводить в движение транспортное средство 200, и передает сигнал начала процесса зарядки в секцию 23 управления зарядкой.
[0019] Ниже, с использованием фиг. 2A и 2B, описывается взаимосвязь между позиционным отклонением между позицией катушки 16 передачи электрической мощности и позицией катушки 26 приема электрической мощности и эффективностью подачи электрической мощности в бесконтактной системе зарядки в этом варианте осуществления. Виды сверху a) согласно фиг. 2A и 2B и виды в перспективе b) и c) согласно фиг. 2A и 2B представляют состояние, в котором катушки 16 передачи электрической мощности и катушки 26 приема электрической мощности располагаются напротив друг друга. На фиг. 2A и 2B ось X и ось Y обозначают направление плоскости каждой из катушки 16 передачи электрической мощности и катушки 26 приема электрической мощности, а ось Z обозначает направление высоты.
[0020] В бесконтактной системе зарядки в этом варианте осуществления передача мощности и прием мощности в форме высокочастотной электрической мощности выполняются бесконтактно согласно действию электромагнитной индукции между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности. Другими словами, когда напряжение прикладывается к катушке 16 передачи электрической мощности, образуется магнитная связь между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности, и электрическая мощность подается из катушки 16 передачи электрической мощности в катушку 26 приема электрической мощности. При такой бесконтактной зарядке, как описано выше, эффективность (эффективность подачи электрической мощности) подачи электрической мощности из катушки 16 передачи электрической мощности в катушку 26 приема электрической мощности зависит от коэффициента связи между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности.
[0021] Предположим теперь, что, как показано на фиг. 2A, транспортное средство 200 паркуется в месте парковки таким образом, что катушка 26 приема электрической мощности становится совпадающей с катушкой 16 передачи электрической мощности в направлении по оси X и направлении по оси Y, которые представляют собой направление плоскости. В этом случае относительная позиция между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности является идентичной позицией в направлении плоскости, и расстояние между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности является наименьшим. В этом случае, поскольку расстояние между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности становится небольшим, и коэффициент связи становится наибольшим, эффективность подачи электрической мощности становится высокой.
[0022] С другой стороны, как показано на фиг. 2B, в случае, если относительная позиция между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности отклоняется в направлении плоскости, как показано на фиг. 2b, вследствие навыков водителя транспортного средства, транспортное средство 200 иногда паркуется в отклоненном состоянии в направлении плоскости.
В примере, показанном на фиг. 2B, позиция катушки 26 приема электрической мощности по отношению к позиции катушки 16 передачи электрической мощности сдвигается на XL в направлении по оси X и сдвигается на YL в направлении по оси Y, и расстояние между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности является таким, что расстояние между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности в направлении плоскости указывает L. В этом случае, позиция катушки 26 приема электрической мощности отклоняется от позиции катушки 16 передачи электрической мощности на расстояние L, так что коэффициент связи в этом случае становится меньше коэффициента связи в случае фиг. 2A. Следовательно, эффективность подачи электрической мощности становится меньше.
[0023] Другими словами, в бесконтактной системе зарядки в этом предпочтительном варианте осуществления, с точки зрения эффективности подачи электрической мощности важно то, что когда транспортное средство 200 паркуется, позиционное отклонение между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности задается небольшим. Следовательно, как подробно описано ниже, когда транспортное средство 200 паркуется, устройство управления крутящим моментом, которое упрощает позиционирование между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности, монтируется в транспортном средстве 200.
[0024] Далее поясняется устройство управления крутящим моментом в этом варианте осуществления со ссылкой на фиг. 3-5.
Фиг. 3 показывает блок-схему устройства управления крутящим моментом в этом варианте осуществления. Фиг. 4 показывает карту 31 крутящего момента, представляющую характеристику крутящего момента (T) относительно скорости (VSP) транспортного средства. Фиг. 5 показывает характеристику коэффициента (K) коррекции относительно расстояния (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности.
[0025] Как показано на фиг. 3, устройство управления крутящим моментом включает в себя: карту 31 крутящего момента; секцию 32 коррекции крутящего момента; датчик 33 угла открытия акселератора; датчик 34 скорости транспортного средства; батарею 21; инвертор 27 и электромотор 28.
Датчик 33 угла открытия акселератора является датчиком для того, чтобы обнаруживать угол (AP) открытия акселератора, задаваемый водителем транспортного средства. Датчик 34 скорости транспортного средства является датчиком для того, чтобы обнаруживать скорость (VSP) движения транспортного средства 200.
[0026] Карта 31 крутящего момента и секция 32 коррекции крутящего момента являются частями EV-контроллера 30 и задают значение (T*) команды управления крутящим моментом для инвертора 27 на основе угла (AP) открытия акселератора и скорости (VSP) транспортного средства. Карта 31 крутящего момента является картой, заранее сохраненной в качестве карты, представляющей взаимосвязь между углом (AP) открытия акселератора, скоростью (VSP) транспортного средства и крутящим моментом (T), как показано на фиг. 4. EV-контроллер 30 обращается к углу (AP) открытия акселератора, обнаруженному посредством датчика 33 угла открытия акселератора, скорости (VSP) транспортного средства, обнаруженной посредством датчика 34 скорости транспортного средства, и карте, описанной выше, для того, чтобы задавать крутящий момент (T).
Следует отметить, что на фиг. 4, характеристика крутящего момента, когда угол (AP) открытия акселератора является наименьшим, указывает характеристику крутящего момента при медленном продвижении.
[0027] Секция 32 коррекции крутящего момента корректирует крутящий момент (T) в соответствии с относительной позицией между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности. Относительная позиция между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности обнаруживается на стороне 200 транспортного средства посредством передачи информации позиции катушки 26 приема электрической мощности, обнаруженной посредством секции 14 обнаружения позиции, в EV-контроллер 30 через секцию 15 связи и секцию 25 связи. Коэффициент (К) коррекции крутящего момента является предварительно заданным коэффициентом. Как показано на фиг. 5, коэффициент (К) коррекции определяется в соответствии с расстоянием (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности в направлении плоскости. В случае, если расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности превышает предварительно установленное расстояние (Lc), коэффициент (K) коррекции задается равным 1,0. В случае, если расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности равно или меньше предварительно установленного расстояния (Lc), коэффициент (K) коррекции задается равным 0,3.
Затем, секция 32 коррекции крутящего момента корректирует крутящий момент посредством умножения крутящего момента (T) на коэффициент (K) коррекции.
Другими словами, секция 32 коррекции крутящего момента не корректирует крутящий момент (T) в случае, если расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности превышает расстояние (Lc), но корректирует крутящий момент (T) в случае, если расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности равно или меньше предварительно установленного расстояния (Lc).
Далее, EV-контроллер 30 вводит выходной крутящий момент из секции 32 коррекции крутящего момента в инвертор 27 в качестве значения (T*) команды управления крутящим моментом. Инвертор 27 управляет электромотором 28 таким образом, что крутящий момент электромотора 28 задается совпадающим со значением команды управления крутящим моментом, введенным из EV-контроллера 30.
[0028] Ниже, с использованием фиг. 1 и фиг. 3-5, описывается содержимое управления устройством управления крутящим моментом в этом варианте осуществления.
Во-первых, когда транспортное средство 200 приближается к предварительно определенной позиции парковки, EV-контроллер 30 управляет секцией 25 связи таким образом, чтобы передавать сигнал в отношении того, что транспортное средство паркуется для того, чтобы выполнять зарядку устройства 100 зарядки. Когда вышеописанный сигнал принимается через секцию 15 связи, секция 13 управления зарядкой распознает, что транспортное средство 200 приближается к предварительно определенной позиции парковки для того, чтобы выполнять зарядку, и активирует секцию 14 обнаружения позиции, так что она периодически обнаруживает позицию катушки 26 приема электрической мощности. Секция 23 управления зарядкой передает позиционную информацию катушки 26 приема электрической мощности, определенную посредством секции 14 обнаружения позиции, на сторону 200 транспортного средства через секцию 15 связи.
[0029] EV-контроллер 30 определяет относительную позицию катушки 26 приема электрической мощности относительно позиции установки катушки 16 передачи электрической мощности из позиционной информации катушки 26 приема электрической мощности, передаваемой через секцию 15 связи. Позиционная информация передается периодическим образом. Таким образом, EV-контроллер 30 может распознавать, до какой степени катушка 26 приема электрической мощности и катушка 16 передачи электрической мощности приближаются друг к другу. После этого EV-контроллер 30 вычисляет расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности в направлении плоскости из позиционной информации по катушке 26 приема электрической мощности.
[0030] Во время приведения в движение транспортного средства 200 EV-контроллер 30 обращается к карте (соответствия) относительно зависимости (карты) 31 крутящего момента от скорости транспортного средства и угла открытия акселератора для того, чтобы задавать крутящий момент (T).
В случае, если расстояние (L) превышает расстояние (Lc), это означает то, что позиция катушки 26 приема электрической мощности размещается в позиции, отдельной от позиции катушки 16 передачи электрической мощности. Следовательно, секция 32 коррекции крутящего момента не корректирует крутящий момент (T), но этот нескорректированный крутящий момент (T) задается равным значению (T*) команды управления крутящим моментом. В случае, если транспортное средство 200 дополнительно приближается к предварительно определенной позиции парковки, и расстояние (L) становится равным или меньше предварительно установленного расстояния (Ls), EV-контроллер 30 определяет то, что позиция катушки 26 приема электрической мощности приближается к позиции катушки 16 передачи электрической мощности, и командует секции 32 коррекции крутящего момента корректировать крутящий момент (T), к примеру, чтобы предоставлять значение (T*) команды управления крутящим моментом, которое меньше крутящего момента перед коррекцией.
[0031] Другими словами, если угол (AP) открытия акселератора является идентичным случаю, в котором расстояние (L) превышает расстояние (Ls), и случаю, в котором расстояние (L) равно или меньше расстояния (Ls), крутящий момент приведения в действие электромотора 28 становится меньшим в случае, если расстояние (L) равно или меньше расстояния (Ls). Крутящий момент приведения в движение транспортного средства 200 относительно величины нажатия педали акселератора становится небольшим. Следовательно, может повышаться удобство использования транспортного средства 200, и может упрощаться позиционирование катушки 16 передачи электрической мощности относительно катушки 26 приема электрической мощности.
Другими словами, в этом варианте осуществления, если катушка 16 передачи электрической мощности приближается к катушке 26 приема электрической мощности, и расстояние (L) становится равным или меньше предварительно установленного расстояния (Ls), усиление акселератора относительно величины нажатия педали акселератора становится небольшим, и характеристика реакции акселератора становится слабой. Следовательно, может повышаться удобство использования транспортного средства 200, и может упрощаться позиционирование катушки 16 передачи электрической мощности по отношению к катушке 26 приема электрической мощности.
[0032] Помимо этого, в случае, если транспортное средство 200 паркуется в предварительно определенной позиции парковки с использованием медленного продвижения, крутящий момент приведения в действие электромотора 28 является крутящим моментом, который меньше крутящего момента медленного продвижения в случае, если расстояние (L) превышает расстояние (Ls), и который задается равным значению (T*) команды управления крутящим моментом, когда расстояние (L) становится равным или меньше расстояния (Ls).
Как описано выше, когда катушка 16 передачи электрической мощности приближается к катушке 26 приема электрической мощности, и расстояние (L) становится равным или меньше расстояния (Ls), крутящий момент приведения в движение транспортного средства 200 относительно крутящего момента при медленном продвижении становится небольшим. Следовательно, может повышаться удобство использования транспортного средства 200, так что может упрощаться позиционирование катушки 16 передачи электрической мощности по отношению к катушке 26 приема электрической мощности.
[0033] Далее, с использованием фиг. 6, поясняется управляющая процедура устройства управления крутящим моментом в этом варианте осуществления. Фиг. 6 показывает блок-схему последовательности операций способа, представляющую управляющую процедуру устройства управления крутящим моментом в этом варианте осуществления. Этапы, показанные на фиг. 6, многократно обрабатываются с предварительно определенным периодом.
[0034] На этапе S1, EV-контроллер 30 определяет угол (AP) открытия акселератора посредством датчика 33 угла открытия акселератора и определяет скорость (VSP) транспортного средства через датчик 34 скорости транспортного средства.
На этапе S2, EV-контроллер 30 обращается к карте, сохраненной в карте 31 крутящего момента, и задает крутящий момент (T) исходя из определенного угла (AP) открытия акселератора и скорости (VSP) транспортного средства.
[0035] На этапе S3, EV-контроллер 30 определяет то, приближается или нет транспортное средство 200 к месту парковки, в котором в этом варианте осуществления монтируется бесконтактная система зарядки. Это определение может быть основано на позиционной информации транспортного средства 200 из GPS-функции, смонтированной в транспортном средстве 200, и позиционной информации места парковки. Альтернативно, это определение может быть основано на такой операции, что транспортное средство 200 приближается к месту парковки с целью выполнять парковку.
Затем, в случае, если EV-контроллер 30 определяет то, что транспортное средство 200 приближается к месту парковки, EV-контроллер 30 передает сигнал, указывающий то, что транспортное средство 200 приближается к месту парковки, в устройство 100 зарядки. Секция 13 управления зарядкой принимает сигнал из секции 15 связи и обнаруживает позицию катушки 26 приема электрической мощности через секцию 15 связи и передает позиционную информацию катушки 26 приема электрической мощности в транспортное средство 200 через секцию 15 связи. Затем, EV-контроллер 30 принимает сигнал, включающий в себя позиционную информацию, через секцию 25 связи и определяет относительную позицию между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности (этап S4).
[0036] На этапе S5, EV-контроллер 30 вычисляет расстояние (L) между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности из относительной позиции между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности и сравнивает расстояние (L) с предварительно установленным расстоянием (Lc). В случае, если расстояние (L) равно или меньше расстояния (Lc), EV-контроллер 30 корректирует крутящий момент (T), заданный на этапе S2. В частности, EV-контроллер 30 корректирует крутящий момент (T) посредством умножения коэффициента (K=0,3) коррекции, заданного в соответствии с расстоянием (L), на крутящий момент (T), как показано на фиг. 5. Затем, EV-контроллер 30 вводит крутящий момент, скорректированный на этапе S6, в инвертор 27 в качестве значения (T*) команды управления крутящим моментом, управляет электромотором 28 и приводит в движение транспортное средство 200.
[0037] Возвращаясь к этапу S3, если EV-контроллер 30 определяет то, что транспортное средство 200 не приближается к месту парковки, процедура переходит к этапу S7 без определения позиции катушек и коррекции крутящего момента, как описано на этапах S4-S6.
Затем, на этапе S7, EV-контроллер 30 вводит крутящий момент, заданный на этапе S2, в качестве значения (T*) команды управления крутящим моментом, в инвертор 27, чтобы управлять электромотором 28 таким образом, что он приводит в движение транспортное средство 200.
[0038] Возвращаясь к этапу S5, в случае, если расстояние (L) превышает расстояние (Lc), процедура переходит к этапу S7 без коррекции крутящего момента на этапе S6. Затем, на этапе S7, EV-контроллер 30 вводит крутящий момент, заданный на этапе S2 в качестве значения (T*) команды управления крутящим моментом, в инвертор 27, чтобы управлять электромотором 28 таким образом, что он приводит в движение транспортное средство 200.
[0039] Как описано выше, в этом варианте осуществления, в соответствии с относительной позицией между позицией катушки 16 передачи электрической мощности и позицией катушки 26 приема электрической мощности, крутящий момент (T), заданный в соответствии с углом открытия акселератора, корректируется, и транспортное средство 200 приводится в движение согласно скорректированному крутящему моменту. Таким образом, по мере того, как приближаются позиция катушки 26 приема электрической мощности и позиция катушки 16 передачи электрической мощности, крутящий момент относительно угла открытия акселератора корректируется таким образом, что водителю становится просто выполнять парковку. Таким образом, может упрощаться позиционирование между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности.
[0040] Помимо этого, в этом варианте осуществления в случае, если расстояние (L) между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности становится меньше предварительно определенного расстояния (Ls), крутящий момент (T), заданный в соответствии с углом открытия акселератора, корректируется, и транспортное средство 200 приводится в движение с помощью скорректированного крутящего момента.
Таким образом, когда позиция катушки 26 приема электрической мощности и позиция катушки 16 передачи электрической мощности приближаются друг к другу, крутящий момент корректируется таким образом, что характеристика реакции акселератора становится слабой. Следовательно, точность позиции парковки становится высокой, так что позиционное отклонение между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности становится небольшим, и может упрощаться позиционирование между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности.
[0041] Помимо этого, в бесконтактной системе зарядки в этом варианте осуществления, в ходе приведения в движение транспортного средства, относительная позиция между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности определяется на стороне земли, сигнал, включающий в себя информацию определенной позиции, передается на сторону 200 транспортного средства. На стороне 200 транспортного средства крутящий момент корректируется в соответствии с относительной позицией, включенной в сигнал. После остановки транспортного средства 200 электрическая мощность подается бесконтактно из катушки 16 передачи электрической мощности на стороне земли, электрическая мощность принимается посредством катушки 26 приема электрической мощности на стороне 200 транспортного средства, и выполняется зарядка батареи 21, смонтированного в транспортном средстве 200. Таким образом, когда позиция катушки 26 приема электрической мощности и позиция катушки 16 передачи электрической мощности сближаются, крутящий момент относительно угла открытия акселератора корректируется таким образом, чтобы облегчать парковку для водителя. Следовательно, может упрощаться позиционирование между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности. В ходе зарядки после парковки, позиционное отклонение между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности является небольшим, так что может повышаться эффективность подачи электрической мощности, и может достигаться сокращение времени зарядка.
[0042] Следует отметить, что секция 14 обнаружения позиции может фотографировать катушку 26 приема электрической мощности транспортного средства 200 для того, чтобы анализировать сфотографированное изображение таким образом, что определяется относительная позиция катушки 26 приема электрической мощности по отношению к катушке 16 передачи электрической мощности. Помимо этого, секция 14 обнаружения позиции может обнаруживать относительную позицию между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности из сигналов передачи и приема электрических волн между антеннами, причем одна из антенн представляет собой передающую антенну, установленную на одной из стороны земли или стороны 200 транспортного средства с возможностью передавать электрические волны, а другая из антенн представляет собой приемную антенну, установленную на другой из стороны Земли или стороны 200 транспортного средства с возможностью принимать электрические волны. Помимо этого, секция 14 обнаружения позиции может обнаруживать относительную позицию между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности посредством получения позиционной информации по транспортному средству 200 из GPS-системы. Кроме того, секция 14 обнаружения позиции может быть установлена на стороне транспортного средства 200.
[0043] Помимо этого, коррекция крутящего момента посредством устройства управления крутящим моментом в этом варианте осуществления включает в себя коррекцию крутящего момента, когда транспортное средство 200 движется задним ходом (в обратном направлении), а не только коррекцию крутящего момента во время движения вперед транспортного средства 200.
[0044] В этом варианте осуществления, относительная позиция катушки 16 передачи электрической мощности по отношению к катушке 26 приема электрической мощности определяется посредством секции 14 обнаружения позиции с тем, чтобы уменьшать позиционное отклонение между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности. Тем не менее, может быть определена относительная позиция для позиции транспортного средства 200 по отношению к предварительно определенной позиции парковки. Другими словами, позиция вышеописанной катушки 16 передачи электрической мощности соответствует предварительно определенной позиции парковки, и позиция вышеописанной катушки 26 приема электрической мощности соответствует позиции транспортного средства 200.
[0045] Устройство управления крутящим моментом в этом варианте осуществления может монтироваться не только в транспортном средстве 200, которое оснащается бесконтактной системой зарядки, но также может монтироваться и в транспортном средстве 200, которое оснащается системой поддержки при парковке для транспортного средства 200. В этом случае, секция 14 обнаружения позиции может обнаруживать относительную позицию между предварительно определенной позицией парковки и позицией транспортного средства 200, и EV-контроллер 30 может корректировать крутящий момент в соответствии с обнаруженной относительной позицией.
[0046] Помимо этого, секция 14 обнаружения позиции может быть установлена на стороне транспортного средства для того, чтобы определять позицию катушки 16 передачи электрической мощности, так что может быть определена относительная позиция между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности.
[0047] Устройство управления крутящим моментом в этом варианте осуществления корректирует крутящий момент приведения в действие электромотора 28, когда транспортное средство паркуется. Тем не менее, в случае, если двигатель приводится в действие, чтобы парковать транспортное средство, крутящий момент двигателя может быть скорректирован аналогично тому, как описано выше.
[0048] Секция управления, включающая в себя карту 31 крутящего момента в EV-контроллере 30, соответствует "средству задания крутящего момента" согласно настоящему изобретению. Секция управления, включающая в себя карту 31 крутящего момента в EV-контроллере 30 и инверторе 27, соответствует "средству управления крутящим моментом" согласно настоящему изобретению. Источник 11 подачи электрической мощности переменного тока, преобразователь 12 и секция 13 управления зарядкой соответствуют "блоку зарядки", а секция 14 обнаружения позиции соответствует "средству определения позиции".
[0049] Фиг. 7 показывает пояснительный вид места парковки для транспортного средства 200, включающего в себя устройство управления крутящим моментом, в другом предпочтительном варианте осуществления согласно настоящему изобретению.
В этом варианте осуществления, характеристика коэффициента (K) коррекции относительно расстояния (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности отличается от вышеописанного первого варианта осуществления. Другие конструкции являются идентичными первому варианту осуществления, описанному выше. Следовательно, описание других конструкций в первом варианте осуществления применяется к этому варианту осуществления.
[0050] В дальнейшем в этом документе поясняется устройство управления крутящим моментом в другом предпочтительном варианте осуществления согласно настоящему изобретению с использованием фиг. 7 и фиг. 8. Фиг. 8 показывает характеристику коэффициента (K) коррекции относительно расстояния (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности. Как показано на фиг. 7, катушка 16 передачи электрической мощности устанавливается в участке места 300 парковки, в котором устанавливается устройство 100 зарядки на стороне земли. Транспортное средство 200 в этом варианте осуществления движется вперед в указанном стрелкой направлении, показанном на фиг. 7, и паркуется в предварительно определенной позиции парковки. Здесь следует отметить, что ось X задается в направлении ширины транспортного средства, ось Y задается в направлении вперед транспортного средства во время парковки транспортного средства 200, и точка пересечения между осью X и осью Y предполагается в качестве центральной точки катушки 16 передачи электрической мощности. Помимо этого, в случае знака "плюс" или "минус" оси Y, расстояние в направлении въезда или выезда места 300 парковки (в направлении вверх согласно фиг. 7) относительно центра катушки 16 передачи электрической мощности предполагается в качестве положительного направления, а расстояние в противоположном направлении касательно въезда или выезда места 300 парковки (в направлении вниз согласно фиг. 7) относительно центральной точки катушки 16 передачи электрической мощности предполагается в качестве отрицательного направления.
[0051] EV-контроллер 30 вычисляет расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности в направлении вперед транспортного средства 200 относительно направления плоскости места 300 парковки из позиционной информации, передаваемой из секции 14 обнаружения позиции. Затем, EV-контроллер 30 обращается к карте относительно карты (зависимости) 31 крутящего момента от скорости транспортного средства и угла открытия акселератора, задает крутящий момент (T) и корректирует заданный крутящий момент (T) в соответствии с расстоянием (L) с использованием коэффициента (K) коррекции через секцию 32 коррекции крутящего момента.
[0052] Как показано на фиг. 8, в случае, если расстояние между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности превышает предварительно установленное расстояние (Y2), или в случае, если расстояние (L) превышает предварительно установленное расстояние (-Y2), коэффициент (K) коррекции задается равным 1,0. Помимо этого, в случае, если расстояние (L) меньше предварительно установленного расстояния (Y1), или в случае, если расстояние (L) меньше предварительно установленного расстояния (-Y1), коэффициент (K) коррекции задается равным 0,3. Помимо этого, в случае, если расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности равно или превышает расстояние (Y1), но равно или меньше расстояния (Y2), коэффициент (K) коррекции увеличивается пропорционально увеличению расстояния в диапазоне от 0,3 до 1,0. В случае, если расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности равно или превышает расстояние (-Y1), но равно или меньше расстояния (-Y2), коэффициент (K) коррекции снижается пропорционально уменьшению расстояния в диапазоне от 0,3 до 1,0.
[0053] Таким образом, в случае, если расстояние (L) превышает расстояние (Y2), EV-контроллер 30 не корректирует крутящий момент (T) через секцию 32 коррекции крутящего момента, а задает крутящий момент (T) в качестве значения (T*) команды управления крутящим моментом, поскольку позиция катушки 26 приема электрической мощности находится на большом расстоянии от позиции катушки 16 передачи электрической мощности. Когда транспортное средство 200 дополнительно приближается к позиции катушки 16 передачи электрической мощности, и расстояние (L) равно или меньше расстояния (Y2), EV-контроллер 30 корректирует крутящий момент (T) таким образом, что по мере того, как расстояние (L) становится меньше, коэффициент (K) коррекции становится меньшим, чтобы постепенно уменьшать значение (T*) команды управления крутящим моментом. Кроме того, в случае, если позиция катушки 26 приема электрической мощности приближается к позиции катушки 16 передачи электрической мощности, и расстояние (L) становится равным или меньше расстояния (Y1), EV-контроллер 30 задает коэффициент коррекции равным постоянному значению (K=0,3), чтобы корректировать крутящий момент (T).
[0054] Помимо этого, вышеописанное управление крутящим моментом выполняется, когда транспортное средство 200 паркуется, так что катушка 26 приема электрической мощности находится в позиции выше катушки 16 передачи электрической мощности, и транспортное средство 200 приводится в движение с тем, чтобы возвращать позицию катушки 26 приема электрической мощности в позицию катушки 16 передачи электрической мощности. Другими словами, EV-контроллер 30 не корректирует крутящий момент (T) посредством секции 32 коррекции крутящего момента, а предполагает крутящий момент (T) в качестве значения (T*) команды управления крутящим моментом, поскольку позиция катушки 26 приема электрической мощности находится на значительном расстоянии от позиции катушки 16 передачи электрической мощности в случае, если расстояние (L) превышает расстояние (-Y2). Затем, в случае, если катушка 26 приема электрической мощности постепенно приближается к катушке 16 передачи электрической мощности, и расстояние (L) равно или меньше расстояния (-Y2), EV-контроллер 30 корректирует крутящий момент (T) таким образом, что, по мере того, как расстояние (L) становится меньше, коэффициент (K) коррекции становится меньшим, и значение (T*) команды управления крутящим моментом постепенно становится небольшим. Кроме того, позиция катушки 26 приема электрической мощности приближается к позиции катушки 16 передачи электрической мощности, и расстояние (L) равно или меньше расстояния (-Y1), EV-контроллер 30 задает коэффициент (K) коррекции равным постоянному значению (K=0,3), чтобы корректировать крутящий момент (T).
[0055] Как описано выше, в этом варианте осуществления, по мере того, как расстояние от позиции катушки 16 передачи электрической мощности и катушки 26 приема электрической мощности становится меньше предварительно определенного расстояния (Y2 или -Y2) в направлении вперед транспортного средства 200 во время парковки, крутящий момент корректируется таким образом, что он становится меньше. Следовательно, по мере того, как позиция катушки 26 приема электрической мощности и позиция катушки 16 передачи электрической мощности приближаются друг к другу, крутящий момент постепенно корректируется таким образом, что характеристика реакции акселератора становится слабой. Таким образом, позиционное отклонение между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности становится небольшим, может повышаться точность позиции парковки, и может упрощаться позиционирование между катушкой 26 для передачи электрической мощности и катушкой 16 для приема электрической мощности.
[0056] Следует отметить, что устройство управления крутящим моментом в этом варианте осуществления вычисляет компонент направления продвижения транспортного средства (направления по оси Y на фиг. 7) во время парковки транспортного средства 200 в качестве расстояния (L) между позицией катушки 26 приема электрической мощности и катушки 16 передачи электрической мощности, и выполняется вышеописанное управление крутящим моментом. Тем не менее, компонент в направлении ширины транспортного средства транспортного средства 200 (в направлении по оси X на фиг. 7) может вычисляться как расстояние (L), и может выполняться вышеописанное управление крутящим моментом. Помимо этого, EV-контроллер 30 может вычислять расстояние в направлении плоскости места парковки в качестве расстояния (L) между позицией катушки 26 приема электрической мощности и позицией катушки 16 передачи электрической мощности, и может выполняться вышеописанное управление крутящим моментом.
Кроме того, EV-контроллер 30 может вычислять расстояние (L) между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности, не только включающее в себя компонент в направлении плоскости места парковки, но также и включающее в себя компонент в вертикальном направлении относительно направления плоскости места парковки (направления по оси Z на фиг. 2a и 2b), и может выполнять вышеописанное управление крутящим моментом.
[0057] Помимо этого, устройство управления крутящим моментом, в этом варианте осуществления, наряду с временем прохождения от момента времени, в который расстояние (L) между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности становится меньше предварительно определенного расстояния, постепенно может увеличивать коэффициент коррекции (K) и может корректировать крутящий момент (T) таким образом, что он становится небольшим. В этом варианте осуществления, в случае, если транспортное средство 200 приводится в движение к предварительно определенной позиции парковки, расстояние между катушкой 26 приема электрической мощности и катушкой 16 передачи электрической мощности становится небольшим с прохождением времени. Следовательно, в этом варианте осуществления, когда предварительно определенное расстояние предварительно установлено в качестве порогового значения, крутящий момент (T) корректируется в соответствии с временем прохождения от момента времени, в который расстояние (L) становится меньше предварительно определенного расстояния. Таким образом, когда позиция катушки 26 приема электрической мощности и позиция катушки 16 передачи электрической мощности приближаются друг к другу, крутящий момент корректируется таким образом, что характеристика реакции акселератора становится слабой. Следовательно, может повышаться точность позиции парковки, так что позиционное отклонение между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности становится небольшим, и может упрощаться позиционирование между катушкой 16 передачи электрической мощности и катушкой 26 приема электрической мощности.
Реферат
Изобретение относится к управлению крутящим моментом и системе бесконтактной зарядки. Устройство управления крутящим моментом содержит средство обнаружения угла открытия акселератора; средство задания крутящего момента, приводящего в движение транспортное средство; и средство управления крутящим моментом для коррекции крутящего момента. Крутящий момент приведения в движение транспортного средства становится относительно небольшим, когда позиция транспортного средства приближается к позиции парковки. Система бесконтактной зарядки, осуществляющая энергоснабжение бесконтактно посредством магнитного взаимодействия между катушкой приема энергии в транспортном средстве и катушкой передачи энергии в устройстве зарядки на стороне земли, причем устройство зарядки содержит: блок зарядки; средство обнаружения позиции между катушкой передачи энергии и катушкой приема энергии и средство передачи сигнала позиции. Транспортное средство содержит батарею, заряжаемую электроэнергией, принимаемой посредством приемной катушки. Упрощается позиционирование ТС к позиции парковки. 2 н. и 6 з.п. ф-лы, 8 ил.
Формула
средство обнаружения угла открытия акселератора для обнаружения угла открытия акселератора;
средство задания крутящего момента для задания крутящего момента, приводящего в движение транспортное средство, на основе угла открытия акселератора, обнаруженного средством обнаружения угла открытия акселератора; и
средство управления крутящим моментом для коррекции крутящего момента, заданного средством задания крутящего момента, так что крутящий момент приведения в движение транспортного средства относительно величины нажатия педали акселератора становится относительно небольшим, когда позиция транспортного средства приближается к предварительно определенной позиции парковки, и для приведения в движение транспортного средства согласно скорректированному крутящему моменту.
причем устройство зарядки содержит: блок зарядки, выполненный с возможностью подачи электроэнергии в катушку передачи энергии; средство обнаружения позиции для обнаружения относительной позиции между катушкой передачи энергии и катушкой приема энергии и средство передачи для передачи сигнала, включающего в себя позицию, обнаруженную средством обнаружения позиции, и
причем транспортное средство содержит: батарею, заряжаемую посредством электроэнергии, принимаемой посредством катушки приема энергии; средство обнаружения угла открытия акселератора для обнаружения угла открытия акселератора, обнаруживаемого средством обнаружения угла открытия акселератора; средство задания крутящего момента для задания крутящего момента, приводящего в движение транспортное средство; средство приема для приема сигнала, передаваемого из средства передачи; и средство управления крутящим моментом для обнаружения относительной позиции между позицией катушки передачи энергии и позицией катушки приема энергии из сигнала, принимаемого средством приема, для коррекции крутящего момента, заданного средством задания крутящего момента, так что крутящий момент приведения в движение транспортного средства относительно величины нажатия педали акселератора становится относительно небольшим, когда позиция транспортного средства приближается к предварительно определенной позиции парковки, и для приведения в движение транспортного средства согласно скорректированному крутящему моменту.
Комментарии