Устройство для выращивания, система для выращивания и способ выращивания - RU2719172C1
Код документа: RU2719172C1
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Данное изобретение относится к устройству для выращивания, системе для выращивания и способу выращивания, предназначенным для выращивания рыбы.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве садка, используемого для выращивания рыбы, известны сетные садки. Сетные садки – это садки, в каждом из которых контейнер для содержания в нем рыбы состоит из сети, а устанавливают сетные садки, например в пруду, озере, реке или береговой зоне моря. Сеть не дает рыбе, содержащейся в контейнере, выйти из контейнера, но позволяет беспрепятственно плавать в нем. Вместе с тем, в обычном садке существуют проблемы с первой по третью, описываемые ниже.
[0003] Первой проблемой является проблема пространства для содержания рыбы. Содержание крупной рыбы требует контейнера, достаточно большого, чтобы содержать крупную рыбу. Вместе с тем, береговые зоны моря используются для различных целей помимо выращивания, и в этих зонах уже разведено много рыбы, а также моллюсков и ракообразных. При таких обстоятельствах, существует предел увеличения размеров контейнера.
[0004] Второй проблемой является проблема, связанная с ущербом окружающей среде, причиняемым садками. Например, в сетном садке рыбу содержат в контейнере, разделенном на отсеки сетью, поэтому плотность органических веществ, таких, как корм или продукты жизнедеятельности рыбы, внутри контейнера значительно выше, чем снаружи. Есть опасение, что такой прирост органических веществ может негативно влиять на окружающую среду снаружи контейнера, например – может вызывать эвтрофикацию.
В дополнение к этому, органические вещества, осевшие на донной подушке такого садка и около нее, подвергаются окислительному разложению микроорганизмами, потребляя большое количество кислорода. Это может вызывать неудовлетворительное насыщение кислородом в донной подушке и около нее.
[0005] Третьей проблемой является проблема, касающаяся корма. В общем случае, когда выращивают крупную рыбу, необходимо подготовить мелкую рыбу, моллюсков и ракообразных на корм. Вместе с тем, поскольку вылов мелкой рыбы, а также моллюсков и ракообразных, ограничен, необходимо выращивать в качестве корма большое количество рыбы, а также моллюсков и ракообразных, в результате чего происходит увеличение затрат, которое создает проблемы.
[0006] При решении этих проблем, например, в патентном первоисточнике 1 описан подводный робот, оснащенный навигационным комплексом и выращивающий косяк рыбы, направляя ее при этом. Ввиду сдвига участка выращивания, нет необходимости учитывать пространство для содержания выращиваемой рыбы, и не происходит осаждение органического вещества, такого, как продукты жизнедеятельности выращиваемой рыбы.
В дополнение к этому, рыба, направляемая подводным роботом, оснащенным навигационным комплексом, может – помимо потребления корма – ловить мелкую встречающуюся в природе рыбу, так что выращивание большого количества рыбы, а также моллюсков и ракообразных, на корм оказывается ненужным.
ПЕРЕЧЕНЬ ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
Патентные первоисточники
[0007] Патентный первоисточник 1: выложенная заявка № 63–273427 на патент Японии
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0008] Вместе с тем, при выращивании с помощью подводного робота, оснащенного навигационным комплексом, описанного в патентном первоисточнике 1, когда прекращают направлять рыбу, она уходит с участка выращивания. По этой причине, необходимо подготавливать большой контейнер и направлять рыбу в контейнер или постоянно продолжать направление рыбы.
Подготовка такого большого контейнера труднодостижима, как описано выше в качестве первой проблемы. В дополнение к этому, с точки зрения подвода мощности к роботу, для подводного робота, оснащенного навигационным комплексом, постоянно направлять рыбу непрактично.
[0009] Данное изобретение решает вышеупомянутые проблемы, а задача данного изобретения состоит в том, чтобы получить устройство для выращивания, систему для выращивания и способ выращивания, дающие возможность корректировать вместимость контейнера для содержания рыбы, которую надлежит вырастить, и сдвигать участок выращивания.
Решение задачи
[0010] Устройство для выращивания в соответствии с данным изобретением включает в себя контейнер для содержания рыбы под водой, устройство для коррекции вместимости, предназначенное для коррекции вместимости контейнера, подводное движущее устройство для движения контейнера под водой, устройство оперативного контроля, предназначенное для получения информации оперативного контроля, указывающей состояния внутри и снаружи контейнера, и устройство управления, предназначенное для управления устройством для коррекции вместимости и подводным движущим устройством. В этой конфигурации, устройство управления определяет вместимость и положение контейнера на основе информации оперативного контроля, получаемой устройством оперативного контроля, устройство для коррекции вместимости корректирует вместимость контейнера до вместимости, определенной устройством управления, а подводное движущее устройство движет контейнер в положение, определенное устройством управления.
Полезные эффекты изобретения
[0011] В соответствии с данным изобретением, коррекция вместимости контейнера и сдвиг участка выращивания возможны на основе состояний внутри и снаружи контейнера, содержащего рыбу, которую надлежит вырастить.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] На фиг.1 представлен вид, иллюстрирующий конфигурацию основной части устройства для выращивания в соответствии с первым вариантом осуществления данного изобретения.
На фиг.2 представлена блок–схема, иллюстрирующая функциональную конфигурацию устройства для выращивания в соответствии с первым вариантом осуществления.
На фиг.3 представлен вид, иллюстрирующий возможную конфигурацию контейнера в первом варианте осуществления.
На фиг.4A представлена блок–схема, иллюстрирующая конфигурацию аппаратных средств для выполнения функций устройства для выращивания в соответствии с первым вариантом осуществления. На фиг.4B представлена блок–схема, иллюстрирующая конфигурацию аппаратных средств для исполнения программного обеспечения, которое выполняет функции устройства для выращивания в соответствии с первым вариантом осуществления.
На фиг.5 представлена блок–схема последовательности операций, иллюстрирующая способ выращивания в соответствии с первым вариантом осуществления.
На фиг.6 представлен вид, иллюстрирующий еще одну конфигурацию контейнера в первом варианте осуществления.
На фиг.7 представлен вид, иллюстрирующий конфигурацию основной части системы для выращивания в соответствии со вторым вариантом осуществления данного изобретения.
На фиг.8 представлена блок–схема, иллюстрирующая функциональную конфигурацию системы для выращивания в соответствии со вторым вариантом осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0013] Чтобы описать данное изобретение подробнее, в дальнейшем будет приведено описание вариантов осуществления данного изобретения со ссылками на прилагаемые чертежи.
Первый вариант осуществления
На фиг.1 представлен вид, иллюстрирующий конфигурацию основной части устройства 1 для выращивания в соответствии с первым вариантом осуществления данного изобретения. На фиг.2 представлена блок–схема, иллюстрирующая функциональную конфигурацию устройства 1 для выращивания. На фиг.3 представлен вид, иллюстрирующий возможную конфигурацию контейнера в первом варианте осуществления, и иллюстрируется сетной контейнер.
Как иллюстрируется на фиг.1, устройство 1 для выращивания представляет собой устройство, которое выращивает рыбу, и включает в себя намоточное устройство 2, контейнер 3, устройство 4 оперативного контроля, подводное движущее устройство 5 и устройство 6 управления. В нижеследующем тексте рыба, которую надлежит вырастить, описана как выращиваемая рыба 100a–100c.
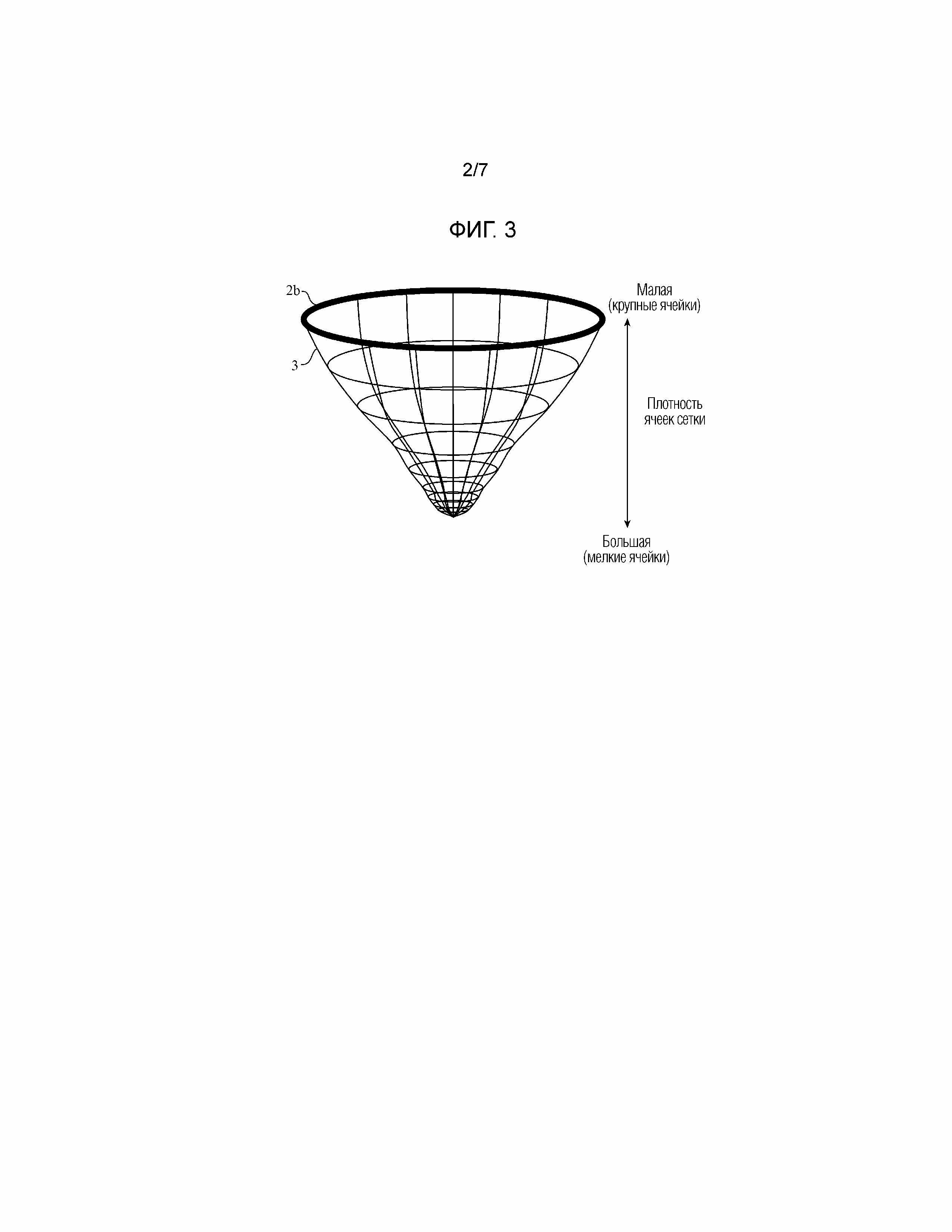
[0014] Намоточное устройство 2 представляет собой устройство для коррекции вместимости, которое корректирует вместимость контейнера 3, наматывая контейнер 3. Намоточное устройство 2 включает в себя, например, блок 2b намотки, иллюстрируемый на фиг.3.
Блок 2b намотки соединен с концом на верхней стороне контейнера 3 и постепенно наматывает контейнер 3 с верхней стороны. Контейнер 3 представляет собой сеть в форме, сводимой на конус от верхней стороны к нижней стороне сети, а его конфигурация такова, что вместимость сети, остающейся под водой, постепенно уменьшается по мере намотки сети с верхней стороны намоточным узлом 2b.
[0015] В дополнение к этому, контейнер 3 представляет собой сеть для содержания выращиваемой рыбы 100a–100c и, как иллюстрируется на фиг.3, имеет такую конфигурацию, что густота ячеек расчетной сети постепенно увеличивается от верхней стороны к нижней стороне сети.
То есть, по мере уменьшения вместимости контейнера 3, ячейка контейнера 3 постепенно становится мельче.
Размер наименьшей ячейки контейнера 3 таков, что мальки выращиваемой рыбы не могут пройти сквозь ячейки.
[0016] Вместимость контейнера 3 можно увеличивать в зависимости от роста выращиваемой рыбы – посредством размотки контейнера 3, намотанного намоточным устройством 2. При этом, вместимость контейнера 3 изменяют до вместимости, соответствующей размеру ячеек, сквозь которые не сможет пройти выросшая выращиваемая рыба. Это ограничивает потребность в формировании всей сети с мелкими ячейками, и можно получать сеть, используя малое количество материала.
[0017] Устройство 4 оперативного контроля представляет собой устройство, которое получает информацию оперативного контроля, указывающую состояния внутри и снаружи контейнера 3, и включает в себя группу датчиков для получения информации оперативного контроля. Информация оперативного контроля включает в себя такую информацию, как температуры воды внутри и снаружи контейнера 3, количества диоксида углерода внутри и снаружи контейнера 3, глубина контейнера 3 от поверхности воды, текущее положение контейнера 3, условия роста выращиваемой рыбы и присутствие или отсутствие живого организма, действующего как внешний враг выращиваемой рыбы. Группа датчиков включает в себя, например, различные датчики, устройство системы глобального позиционирования (GPS) и съемочную камеру. Различные датчики определяют температуры воды, количества диоксида углерода, глубины воды, и т.п. Устройство GPS обнаруживает положение контейнера 3. Съемочная камера снимает выращиваемую рыбу и живой организм, действующий как ее внешний враг.
[0018] Подводное движущее устройство 5 представляет собой устройство, которое движет контейнер 3 под водой и включает в себя, например, электродвигатель и винт, как иллюстрируется на фиг.1. Этого достаточно, лишь бы подводное движущее устройство 5 включало в себя механизм–движитель, который может двигать контейнер под водой, а помимо винта можно позаимствовать водометный движитель. В дополнение к этому, подводное движущее устройство 5 может не только перемещать контейнер 3 горизонтально, но и перемещать контейнер 3 в направлении глубины.
[0019] Устройство 6 управления представляет собой устройство, которое управляет намоточным устройством 2 и подводным движущим устройством 5 на основе информации оперативного контроля, получаемой устройством 4 оперативного контроля. Как иллюстрируется на фиг.2, устройство 6 управления включает в себя блок 2а коррекции, блок 4а оперативного контроля, блок 5а движения и блок 6а управления.
[0020] Блок 2а коррекции управляет работой намоточного устройства 2 таким образом, что получается вместимость, определяемая блоком 6а управления. Например, в запоминающем устройстве (не проиллюстрировано) хранится табличная информация, в которой зарегистрированы вместимости контейнера 3 и соответственные числа витков намотки, соответствующие им. Блок 2а коррекции выбирает число кручений, соответствующее вместимости, определяемой блоком 6а управления из табличной информации, и заставляет намоточное устройство 2 наматывать контейнера 3 с выбранным числом витков намотки.
[0021] Блок 4а оперативного контроля передает запрос информации в устройство 4 оперативного контроля, принимает информацию оперативного контроля, получаемую устройством 4 оперативного контроля в соответствии с запросом информации, и выдает информацию оперативного контроля, принимаемую из устройства 4 оперативного контроля, в блок 6а управления. Запрос информации периодически передается из блока 4а оперативного контроля в устройство 4 оперативного контроля. При этом, интервал передачи запроса информации можно изменять в зависимости от содержания информации оперативного контроля.
Например, когда присутствует живой организм, действующий как внешний враг выращиваемой рыбы, срочно необходимо переместить контейнер 3, чтобы защитить выращиваемую рыбу от живого организма, действующего как внешний враг. Поэтому блок 4а оперативного контроля передает в устройство 4 оперативного контроля через короткие интервалы запрос информации, касающийся информации оперативного контроля о живых организмах в непосредственной близости к контейнеру 3.
В дополнение к этому, блок 4а оперативного контроля передает в устройство 4 оперативного контроля через относительно длинные интервалы запрос информации, касающийся такой информации оперативного контроля, как температуры воды, количества диоксида углерода и условия роста выращиваемой рыбы, при этом считается, что информации оперативного контроля не показывает внезапных изменений.
[0022] Блок 5а движения управляет подводным движущим устройством 5 в соответствии с информацией о движении, получаемой из блока 6а управления. Информация о движении – это информация, указывающая положение при движении контейнера 3, определенное блоком 6а управления, и включающая в себя относительное расстояние и направление от текущего положения контейнера 3 к целевому положению. Блок 5а движения генерирует команду движения для осуществления движения, соответствующего расстоянию и направлению, включенным в информацию о движении, и выдает генерированную команду движения в подводное движущее устройство 5. Подводное движущее устройство 5 движет контейнер 3 в целевое положение в соответствии с командой движения.
[0023] Блок 6а управления определяет величину коррекции вместимости контейнера 3 на основе информации оперативного контроля, вводимой из блока 4а оперативного контроля, и определяет по контейнеру 3 информацию о движении. Например, когда текущая вместимость контейнера 3 оказывается слишком малой по сравнению с вместимостью контейнера 3, подходящей для размера и поведенческого диапазона выращиваемой рыбы, блок 6а управления предписывает блоку 2а коррекции увеличить вместимость контейнера 3. С другой стороны, когда текущая вместимость контейнера 3 оказывается слишком большой, блок 6а управления предписывает блоку 2а коррекции уменьшить вместимость контейнера 3.
В дополнение к этому, блок 6а управления генерирует информацию о движении, включающую в себя относительное расстояние и направление от текущего положения контейнера 3 к целевому положению, и выдает генерированную информацию о движении в блок 5а движения. Положение контейнера 3 задается, например, координатами положения (широтой и долготой) контейнера 3 и его глубиной от поверхности воды.
[0024] На фиг.4A представлена блок–схема, иллюстрирующая конфигурацию аппаратных средств для выполнения функций устройства 1 для выращивания. На фиг.4A показано, что схема 200 обработки соединена с намоточным устройством 2, устройством 4 оперативного контроля и подводным движущим устройством 5. На фиг.4B представлена блок–схема, иллюстрирующая конфигурацию аппаратных средств для исполнения программного обеспечения, которое выполняет функции устройства 1 для выращивания. На фиг.4B показано, что процессор 201 и запоминающее устройство 202 соединены с намоточным устройством 2, устройством 4 оперативного контроля и подводным движущим устройством 5.
[0025] Функции блока 2а коррекции, блока 4а оперативного контроля, блока 5а движения и блока 6а управления в устройстве 1 для выращивания воплощаются схемой обработки. То есть, устройство 1 для выращивания включает в себя схему обработки для выполнения последовательности процессов от этапа ST1 до этапа ST8, иллюстрируемых на фиг.5. Схема обработки может быть специализированным аппаратным средством или центральным процессором (ЦП), которое или который исполняет программу, хранимую в запоминающем устройстве.
[0026] Когда схема обработки представляет собой специализированное аппаратное средство, проиллюстрированное на фиг.4A, схема 200 обработки соответствует, например, одиночной схеме, составной схеме, программируемому процессору, параллельно программируемому процессору, интегральной схеме прикладной ориентации (ИСПО (ASIC)), программируемой пользователем логической матрице ППЛМ (FPGA)), или их комбинации.
Функции блока 2а коррекции, блока 4а оперативного контроля, блока 5а движения и блока 6а управления могут быть воплощены отдельными схемами обработки, или эти функции могут быть вместе воплощены одной схемой обработки.
[0027] Когда схема обработки представляет собой процессор 201, проиллюстрированный на фиг.4B, функции блока 2а коррекции, блока 4а оперативного контроля, блока 5а движения и блока 6а управления могут быть воплощены программными средствами, программно–аппаратными средствами или комбинацией программных средств и программно–аппаратных средств.
Процессор 201 воплощает функции соответственных блоков путем считывания и исполнения программ, хранимых в запоминающем устройстве 202. То есть, устройство 1 для выращивания включает в себя запоминающее устройство 202 для хранения программ, которые, когда их исполняет процессор 201, приводят к исполнению последовательности процессов от этапа ST1 до этапа ST8, проиллюстрированных на фиг.5.
Эти программы заставляют компьютер исполнять процедуры или способы блока 2а коррекции, блока 4а оперативного контроля, блока 5а движения и блока 6а управления.
[0028] Запоминающее устройство 202 соответствует, например, энергонезависимому или энергозависимому полупроводниковому запоминающему устройству, такому, как оперативное запоминающее устройство (ОЗУ (RAM)), постоянное запоминающее устройство (ПЗУ (ROM)), флэш–памяти, стираемое программируемое постоянное запоминающее устройство (СППЗУ (EPROM)) или электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ (EEPROM)), магнитный диск, гибкий диск, оптический диск, компакт–диск, мини–диск или цифровой видеодиск (ЦВД (DVD)).
[0029] Некоторые из функций блока 2а коррекции, блока 4а оперативного контроля, блока 5а движения и блока 6а управления можно воплотить специализированными аппаратными средствами, а некоторые из этих функций можно воплотить программными средствами или программно–аппаратными средствами.
Например функции блока 2а коррекции, блока 4а оперативного контроля и блока 5a движения может воплотить схема 200 обработки как специализированное аппаратное средство, а функцию блока 6а управления может воплотить процессор 201, считывающий и исполняющий программу, хранимую в запоминающем устройстве 202.
Таким образом, схема обработки может воплотить вышеупомянутые функции аппаратными средствами, программными средствами, программно–аппаратными средствами или их комбинацией.
[0030] Далее будет описана работа.
На фиг.5 представлена блок–схема последовательности операций, иллюстрирующая способ выращивания в соответствии с первым вариантом осуществления.
Блок 4а оперативного контроля получает (этап ST1) информацию оперативного контроля, указывающую состояния внутри и снаружи контейнера 3, из устройства 4 оперативного контроля. Информация оперативного контроля, получаемая блоком 4а оперативного контроля, выдается в блок 6а управления.
Блок 6а управления определяет (этап ST2), удовлетворяет ли состояние снаружи контейнера 3 условию движения, на основе информации оперативного контроля, вводимой из блока 4а оперативного контроля. Условие движения указывает состояние или объект, которого контейнер 3 должен срочно избежать, а примеры этого могут включать в себя ухудшение погоды, приближение другого судна и живой организм, действующий как внешний враг выращиваемой рыбы.
[0031] Когда блок 6а управления определяет, что состояние снаружи контейнера 3 удовлетворяет (этап ST2; ДА) условию движения, блок 6а управления уведомляет блок 5а движения о направлении, в котором присутствует состояние или объект, которого следует избегать.
Например, блок 6а управления уведомляет блок 5а движения о направлении, в котором присутствует живой организм, действующий как внешний враг, направлении, в котором приближается другое судно, направлении, в котором ухудшается погода, и т.п.
Блок 5а движения выдает (этап ST3) в подводное движущее устройство 5 команду движения для осуществления движения в направлении, позволяющем избежать состояния или объекта, о котором поступило уведомление из блока 6а управления. Подводное движущее устройство 5 движет контейнер 3 в соответствии с командой движения, вводимой из блока 5а движения. После этого обработка возвращается к процессу этапа ST1.
[0032] С другой стороны, когда блок 6а управления определяет (этап ST2; НЕТ), что состояние снаружи контейнера 3 не удовлетворяет условию движения, блок 6а управления сличает (этап ST4) информацию об оптимальном разведении с информацией оперативного контроля, чтобы вычислить значение сличения. Информация об оптимальном разведении – это информация, указывающая температуру воды, глубину и нерестилище, подходящие для каждой из многочисленных стадий роста выращиваемой рыбы от мальков до половозрелых особей. Значение сличения – это значение, указывающее разницу между информацией об оптимальном разведении и информацией оперативного контроля. Как значение сличения заимствуют, например, ошибку, вычисленную методом наименьших квадратов, между истинным значением, полученным путем «взвешивания» каждого из таких параметров, как температура воды, глубина и положение нерестилища, в зависимости от их соответственных степеней важности, и значением, полученным путем «взвешивания» каждого из таких параметров, как текущая температура воды, текущая глубина и текущее положение, включенные в информацию оперативного контроля, в зависимости от их соответственных степеней важности.
[0033] Затем блок 6а управления определяет (этап ST5), больше ли значение сличения, вычисленное на этапе ST4, чем порог. Порог – это допуск значения сличения, по которому текущая среда выращивания считается аналогичной среде оптимального разведения. Когда значение сличения равно упомянутому порогу или меньше него, текущую среду выращивания определяют как аналогичную среде оптимального разведения, а когда значение сличения больше упомянутого порога, текущую среду выращивания определяют как не аналогичную среде оптимального разведения.
[0034] Когда блок 6а управления определяет (этап ST5; НЕТ), что значение сличения равно упомянутому порогу или меньше него, обработка возвращается к этапу ST1, а вышеописанная последовательность процессов повторяется.
Когда блок 6а управления определяет (этап ST5; ДА), что значение сличения больше упомянутого порога, блок 6а управления задает некоторый участок (целевое положение), пригодный для разведения выращиваемой рыбы, включая этот участок в информацию об оптимальном разведении, и вычисляет относительное расстояние и направление от текущего положения контейнера 3 к целевому положению. Информация о движении, включающая в себя вычисленные расстояние и направление, выдается из блока 6а управления в блок 5а движения.
Блок 5а движения генерирует команду движения для осуществления движения, соответствующего расстоянию и направлению, включенным в информацию о движении, и выдает (этап ST6) генерированную команду движения в подводное движущее устройство 5. Подводное движущее устройство 5 движет контейнер 3 к участку, пригодному для разведения выращиваемой рыбы, в соответствии с командой движения.
[0035] После движения контейнера 3 к участку, пригодному для разведения выращиваемой рыбы, блок 6а управления задает размер и поведенческий диапазон выращиваемой рыбы на основе информации оперативного контроля, вводимой из блока 4а оперативного контроля, и определяет вместимость контейнера 3, подходящую для заданного размера и поведенческого диапазона выращиваемой рыбы.
Затем, когда разность между определяемой вместимостью контейнера 3 и текущей вместимостью контейнера 3 превышает порог, блок 6а управления определяет вместимость контейнера 3 так, чтобы разность между ними оказалась равной порогу или меньшей, чем он, и выдает информацию о вместимости, указывающую определяемую вместимость, в блок 2а коррекции. Блок 2а коррекции генерирует команду коррекции вместимости для осуществления коррекции вместимости контейнера 3 в соответствии с вместимостью, включенной в информацию о вместимости, и выдает (этап ST7) генерированную команду коррекции вместимости в намоточное устройство 2. Намоточное устройство 2 корректирует вместимость контейнера 3 до достижения вместимости, соответствующей состоянию разведения выращиваемой рыбы, в соответствии с командой коррекции вместимости.
[0036] Блок 6а управления определяет (этап ST8), является ли участок, на котором движение закончилось на этапе ST6, положением лова. Когда блок 6а управления определяет (этап ST8; НЕТ), что текущее положение контейнера 3 не является положением лова, обработка возвращается к этапу ST1 и последовательность вышеописанных процессов повторяется. Когда блок 6а управления определяет (этап ST8; ДА), что текущее положение контейнера 3 является положением лова, считают, что выращиваемая рыба уже выросла до размера достаточно крупной для лова. Поэтому обработка, показанная на фиг.5, заканчивается.
[0037] Устройство 1 для выращивания в соответствии с первым вариантом осуществления устанавливают, например, в озере, реке или береговой зоне моря.
Затем мальков выращиваемой рыбы выпускают вовнутрь контейнера 3. При этом, ячейки контейнера 3 являются настолько мелкими, что мальки не могут пройти сквозь ячейки, а вместимость контейнера 3 корректируют до вместимости, позволяющей гарантировать поведенческий диапазон, в котором мальки размножатся надлежащим образом. После этого, устройство 6 управления управляет намоточным устройством 2 и подводным движущим устройством 5 в зависимости от роста выращиваемой рыбы, и поэтому вместимость контейнера 3 корректируется в зависимости от размера и поведенческого диапазона выращиваемой рыбы, а контейнер 3 движется к участку, пригодному для разведения выращиваемой рыбы.
[0038] Хотя описан случай, где контейнер для содержания выращиваемой рыбы представляет собой сеть, это не является накладываемым на такой контейнер ограничением. В первом варианте осуществления можно воспользоваться любым контейнером постольку, поскольку в нем можно будет содержать выращиваемую рыбу и можно будет корректировать его вместимость, а также можно будет позаимствовать, например, контейнер с конфигурацией, указываемой ниже.
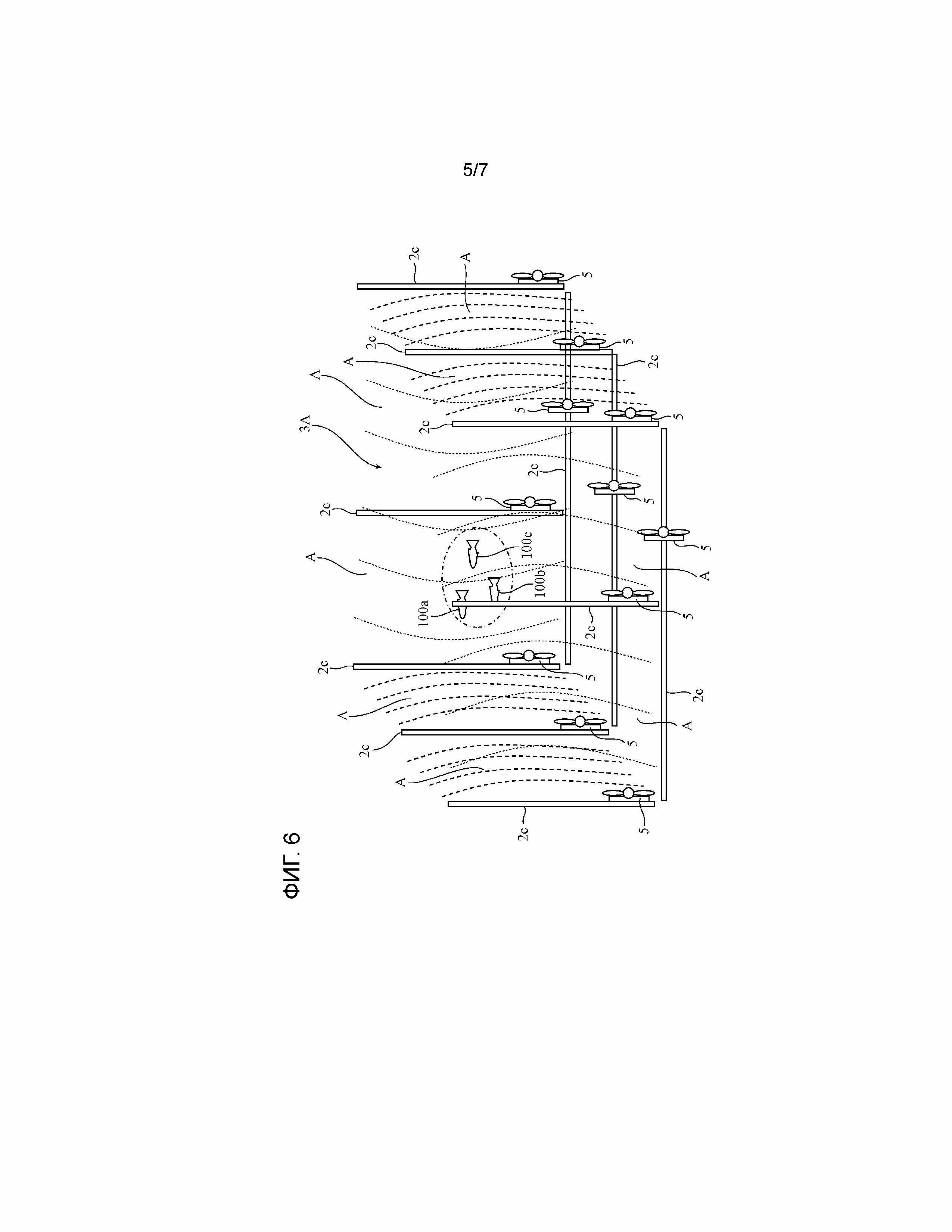
На фиг.6 представлен вид, иллюстрирующий конфигурацию контейнера 3A в первом варианте осуществления. Как иллюстрируется на фиг.6, контейнер 3A включает в себя поверхности А виртуальных стенок, которые ограничивают прохождение выращиваемой рыбы 100a–100c посредством колебательных волн, распространяемых под водой. Колебательные волны генерируются стержнеобразными генераторами 2c.
Соседние генераторы 2c генерируют колебательными волны друг к другу, и поэтому поверхности А стенок образуются между соседними генераторами 2c.
Хотя на фиг.6 поверхности А стенок на верхней и нижней поверхностях контейнера 3A не показаны, поверхности A стенок предусмотрены на каждой из верхней и нижней поверхностей в дополнение к четырем боковым поверхностям контейнера 3A.
[0039] Подводные движущие устройства 5, проиллюстрированные на фиг.1, крепятся к соответственным генераторам 2c.
Блок 5а движения генерирует команду движения в соответствии с информацией о движении, получаемой из блока 6а управления, и выдает генерированную команду движения в подводные движущие устройства 5. Подводные движущие устройства 5 движут контейнер 3A в целевое положение, поддерживая при этом образованные поверхности А стенок в соответствии с командой движения.
Блок 2а коррекции генерирует команду коррекции вместимости в соответствии с информацией о вместимости, получаемой из блока 6а управления, и выдает генерированную команду коррекции вместимости в подводные движущие устройства 5. Подводные движущие устройства 5 изменяют расстояние между соседними генераторами 2c таким образом, что получается целевая вместимость в соответствии с командой коррекции вместимости.
Когда расстояние между соседними генераторами 2c уменьшается, поверхности А стенок соответственно сокращаются, а когда расстояние между соседними генераторами 2c увеличивается, поверхности А стенок соответственно укрупняются. То есть, подводные движущие устройства 5 функционируют как устройство для коррекции вместимости, корректируя вместимость контейнера 3A.
Расстояние между соседними генераторами 2c можно изменять посредством механизма–движителя, предусматриваемого отдельно от подводных движущих устройств 5.
[0040] Как описано выше, устройство 1 для выращивания в соответствии с первым вариантом осуществления включает в себя намоточное устройство 2, контейнер 3 или контейнер 3A, устройство 4 оперативного контроля, по меньшей мере, одно из подводных движущих устройств 5 и устройство 6 управления. В этой конфигурации, устройство 6 управления определяет вместимость и положение контейнера 3 или контейнера 3А на основе информации оперативного контроля, получаемой устройством 4 оперативного контроля. Намоточное устройство 2 корректирует вместимость контейнера 3 или контейнера 3A до вместимости, определяемой устройством 6 управления, а подводное движущее устройство 5 движет контейнер 3 или контейнер 3A в положение, определенное устройством 6 управления.
Поскольку контейнер 3 или контейнер 3A движется так, как описано выше, контейнер 3 или контейнер 3A не установлен неподвижно в береговой зоне моря или подобном ей месте. По этой причине, первая проблема, описанная ранее, решается, и оказывается возможным увеличение вместимости контейнера 3 или контейнера 3А большее, чем когда–либо раньше.
В дополнение к этому, за счет движения контейнера 3 или контейнера 3A, можно подавить увеличение плотности органических веществ, так что решается и вторая проблема, описанная ране.
Кроме того, ячейки в контейнере 3 препятствуют выпуску выращиваемой рыбы 100a–100c наружу, а рыба, размер которой меньше чем размер ячеек, может попадать внутрь контейнера 3 снаружи.
То есть, выращиваемая рыба 100a–100c может захватывать – отдельно от корма – маленькую рыбу, естественным образом попадающую внутрь контейнера 3. В результате, не нужно выращивать большое количество рыбы, а также моллюсков и ракообразных, на корм и можно подавить увеличение затрат, тем самым решая третью вышеописанную проблему.
[0041] В устройстве 1 для выращивания в соответствии с первым вариантом осуществления контейнер 3 состоит из сети, ячейки которой становятся мельче по мере ее намотки. Намоточное устройство 2 корректирует вместимость контейнера 3, наматывая сеть контейнера 3. При наличии вышеописанной конфигурации, вместимость контейнера 3 можно корректировать в зависимости от состояния разведения выращиваемой рыбы 100a–100c.
[0042] В устройстве 1 для выращивания в соответствии с первым вариантом осуществления контейнер 3A образован поверхностями А виртуальных стенок, которые препятствуют прохождению рыбы посредством колебательных волн, распространяемых под водой. Подводные движущие устройства 5 корректируют вместимость контейнера 3A за счет укрупнения и сокращения размера поверхностей А стенок. С этой конфигурацией, также можно корректировать вместимость контейнера 3A в зависимости от состояния разведения выращиваемой рыбы 100a–100c.
[0043] Второй вариант осуществления
На фиг.7 представлен вид, иллюстрирующий конфигурацию основной части системы 7 для выращивания в соответствии со вторым вариантом осуществления данного изобретения. Что касается тех же компонентов, что и на фиг.1, то на фиг.7 для них приводятся те же позиции, а их описания будут опущены. На фиг.8 представлена блок–схема, иллюстрирующая функциональную конфигурацию системы 7 для выращивания. Что касается тех же компонентов, что и на фиг.2, то на фиг.8 для них приводятся те же позиции, а их описания будут опущены.
[0044] как иллюстрируется на фиг.7, система 7 для выращивания включает в себя устройство 1A для выращивания и аппаратуру 9 базовой станции.
Устройство 1A для выращивания включает в себя намоточное устройство 2, контейнер 3, устройство 4 оперативного контроля, подводное движущее устройство 5, устройство 6A управления и антенну 8. Аппаратура 9 базовой станции установлена на судне 300 и с помощью антенны 10 осуществляет беспроводную связь с устройством 1A для выращивания. Аппаратура 9 базовой станции может быть установлена и на суше.
[0045] Как иллюстрируется на фиг.8, устройство 6A управления включает в себя блок 2а коррекции, блок 4а оперативного контроля, блок 5а движения и блок 8а связи. Посредством беспроводной связи с помощью антенны 8, блок 8а связи передает информацию оперативного контроля, получаемую блоком 4а оперативного контроля, в аппаратуру 9 базовой станции и принимает из аппаратуры 9 базовой станции информацию о движении и информацию о вместимости, которые являются управляющей информацией. Первое устройство связи, которое осуществляет связь с аппаратурой 9 базовой станции, включает в себя антенну 8 и блок 8а связи.
[0046] Блок 2а коррекции генерирует команду коррекции вместимости для изменения вместимости контейнера 3 до вместимости, включенной в информацию о вместимости, принимаемой блоком 8а связи, и выдает генерированную команду коррекции вместимости в намоточное устройство 2. Намоточное устройство 2 корректирует вместимость контейнера 3 до вместимости, соответствующей состоянию разведения выращиваемой рыбы, в соответствии с командой коррекции вместимости.
Блок 5а движения генерирует команду движения для осуществления движения, соответствующего расстоянию и направлению, включенным в информацию о движении, принимаемую блоком 8а связи, и выдает генерированную команду движения в подводное движущее устройство 5. Подводное движущее устройство 5 движет контейнер 3 в целевое положение в соответствии с командой движения.
[0047] Аппаратура 9 базовой станции включает в себя блок 10а связи и устройство 11 управления как иллюстрируется на фиг.8.
Посредством беспроводной связи с помощью антенны 10, блок 10а связи передает информацию о движении и информацию о вместимости в устройство 1A для выращивания и принимает информацию оперативного контроля из устройства 1A для выращивания. Второе устройство связи, которое осуществляет связь с устройством 1A для выращивания, включает в себя антенну 10 и блок 10а связи.
[0048] На основе информации оперативного контроля, принимаемой блоком 10а связи, устройство 11 управления вычисляет информацию о вместимости, исходя из контейнера 3, и вычисляет информацию о движении, исходя из контейнера 3. Например, аналогично первому варианту осуществления, устройство 11 управления сличает информацию об оптимальном разведении с информацией оперативного контроля, чтобы вычислить значение сличения, и определяет, больше ли значение сличения, чем порог. Когда значение сличения больше упомянутого порога, устройство 11 управления вычисляет информацию о движении и информацию о вместимости, пользуясь информацией об оптимальном разведении. Информацию о движении и информацию о вместимости, вычисленные устройством 11 управления, передают – посредством блока 10а связи – в устройство 1A для выращивания.
[0049] Хотя описан случай, где блок 8а связи осуществляет беспроводную связь с аппаратурой 9 базовой станции, а блок 10а связи осуществляет беспроводную связь с устройством 1A для выращивания, беспроводную связь можно заменить проводной связью.
В дополнение к этому, поскольку под водой есть помехи распространению радиоволн, радиоприемник, такой, как антенна, делают открытым над поверхностью воды, когда осуществляют беспроводную связь.
[0050] Аппаратура 9 базовой станции может включать в себя устройство предоставления информации и устройство ввода (не проиллюстрированы).
Устройство предоставления информации – это устройство, которое предоставляет оператору информацию оперативного контроля, принимаемую блоком 10а связи. Например, устройство предоставления информации включает в себя монитор, который отображает информацию оперативного контроля.
Устройство ввода представляет собой устройство, которое принимает осуществляемый оператором ввод управляющей информации (информации о вместимости и информации о движении). Например, с помощью устройства ввода оператор, может вводить управляющую информацию, соответствующую информации оперативного контроля, в аппаратуру 9 базовой станции.
Управляющую информацию, принимаемую устройством ввода, передают – посредством блока 10а связи – в устройство 1A для выращивания. Устройство 1A для выращивания движет контейнер 3 и корректирует вместимость контейнера 3 на основе управляющей информации, принимаемой блоком 8а связи из аппаратуры 9 базовой станции.
[0051] Как описано выше, система 7 для выращивания в соответствии со вторым вариантом осуществления включает в себя устройство 1A для выращивания и аппаратуру 9 базовой станции. Устройство 11 управления аппаратуры 9 базовой станции определяет вместимость и положение контейнера 3 на основе информации оперативного контроля, принимаемой блоком 10а связи из устройства 1A для выращивания, и заставляет блок 10а связи передавать информацию о вместимости и информацию о движении в устройство 1A для выращивания. Намоточное устройство 2 корректирует вместимость контейнера 3 до вместимости, определяемой устройством 11 управления, на основе информации о вместимости, принимаемой блоком 8а связи из аппаратуры 9 базовой станции. Подводное движущее устройство 5 движет контейнер 3 в положение, определенное аппаратурой 9 базовой станции, на основе информации о движении, принимаемой блоком 8а связи из аппаратуры 9 базовой станции.
При наличии вышеописанной конфигурации, вместимость контейнера 3 можно корректировать, а участок выращивания можно сдвигать на основе состояний внутри и снаружи контейнера 3.
[0052] Следует отметить, что – в рамках объема притязаний изобретения – в данном изобретении каждый из вариантов осуществления можно беспрепятственно объединять с другим вариантом осуществления, любой составляющий элемент каждого варианта осуществления можно модифицировать, или любой составляющий элемент можно исключать в каждом варианте осуществления.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0053] Устройство для выращивания, соответствующее данному изобретению, способно корректировать вместимость контейнера для содержания выращиваемой рыбы и сдвигать участок выращивания, вследствие чего предлагаемое устройство пригодно для выращивания крупной рыбы, такой, как тунец.
ПЕРЕЧЕНЬ ПОЗИЦИЙ ЧЕРТЕЖЕЙ
[0054] 1, 1A: устройство для выращивания
2: намоточное устройство
2a: блок коррекции
2b: блок намотки
2c: генератор
3, 3A: контейнер
4: устройство оперативного контроля
4a: блок оперативного контроля
5: подводное движущее устройство
5a: блок движения
6, 6A, 11: устройство управления
6a: блок управления
7: система для выращивания
8, 10: антенна
8a, 10a: блок связи
9: аппаратура базовой станции
100a–100c: выращиваемая рыба
200: схема обработки
201: процессор
202: запоминающее устройство
300: судно
Реферат
Устройство включает контейнер для содержания рыбы под водой, устройство для коррекции вместимости контейнера, движущее устройство для движения контейнера под водой, устройство оперативного контроля состояния внутри и снаружи контейнера и устройство управления устройством для коррекции вместимости и подводным движущим устройством. Устройство управления определяет вместимость и положение контейнера на основе информации оперативного контроля, получаемой устройством оперативного контроля. Устройство для коррекции вместимости корректирует вместимость контейнера до вместимости, определенной устройством управления. Подводное движущее устройство движет контейнер в положение, определенное устройством управления. Изобретение обеспечивает возможность корректировать вместимость контейнера для содержания рыбы, которую надлежит вырастить, и сдвигать участок выращивания. 3 н. и 2 з.п. ф-лы, 9 ил.
Комментарии