Позиционирующее устройство, управляющее устройство и способ управления - RU2633302C2
Код документа: RU2633302C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к позиционирующему устройству, управляющему устройству и способу управления.
Уровень техники
Позиционирующие устройства, в целом, известны, например, из EP 0421527 A1, WO 2004/055607 A2 и WO 2007/057842 A1.
Известная конфигурация высокоточного позиционирующего устройства содержит две или более платформ, установленных поверх друг друга, где, по меньшей мере, верхняя платформа является полностью плавающей в 6 степенях свободы. Верхняя платформа в этой конфигурации типично имеет ограниченные (до 1 мм) ходы в вертикальных направлениях и, по меньшей мере, один ограниченный ход в горизонтальном направлении. Платформы ниже этой верхней платформы будут обеспечивать длинный ход в этом направлении.
Верхняя платформа типично удерживает объект, который должен быть позиционирован, и зачастую имеет требование поддерживать очень стабильную температуру и равномерное распределение температуры с тем, чтобы не деформировать этот объект. Следовательно, важно ограничивать проводимость тепла от актуатора к остальной части структуры верхней платформы. Обычно водяное охлаждение используется для переноса тепла от актуатора. Это водяное охлаждение, однако, формирует механическое соединение с верхней платформой и ухудшает динамическую характеристику платформы.
Раскрытие изобретения
Целью настоящего изобретения является предоставление позиционирующего устройства, имеющего очень стабильную температуру, очень низкое потребление энергии и равномерное распределение температуры.
Другой целью настоящего изобретения является предоставление управляющего устройства и способа управления для использования в позиционирующем устройстве для управления упомянутым позиционирующим устройством так, чтобы обеспечивать очень стабильную температуру, очень низкое потребление энергии и равномерное распределение температуры.
В первом аспекте настоящего изобретения представляется позиционирующее устройство, которое содержит:
- опорную структуру, содержащую один или более опорных элементов,
- платформу с длинным ходом, которая поддерживается и является подвижной в направлении перемещения относительно опорного элемента, платформа с длинным ходом содержит несущий элемент платформы с длинным ходом, который поддерживается посредством опорного элемента с длинным ходом,
- платформу с коротким ходом, которая является подвижной в направлении перемещения относительно платформы с длинным ходом, платформа с коротким ходом содержит несущий элемент платформы с коротким ходом, который поддерживается посредством опорного элемента с коротким ходом,
при этом платформа с длинным ходом или платформа с коротким ходом имеет два актуатора, размещенных напротив друг друга на фиксированном расстоянии с зазором между ними, каждый актуатор содержит ферромагнитное ярмо и магнит, размещенный на пути магнитного потока ярма, и при этом другая из платформы с длинным ходом или платформы с коротким ходом содержит ферромагнитный центральный элемент, который размещается между актуаторами,
- блок управления для инициирования перемещения платформы с длинным ходом и платформы с коротким ходом в желательном направлении перемещения посредством сначала перемещения платформы с длинным ходом в противоположном направлении, которое является противоположным требуемому направлению перемещения, и/или перемещения платформы с коротким ходом в требуемом направлении перемещения в течение предварительно определенного интервала времени и на расстояние, меньшее, чем расстояние между ферромагнитным центральным элементом и ближайшим актуатором в неподвижном состоянии платформы с длинным ходом, и затем перемещения платформы с длинным ходом в требуемом направлении перемещения.
В дополнительном аспекте настоящего изобретения представляется управляющее устройство для использования в таком позиционирующем устройстве, в котором упомянутое управляющее устройство конфигурируется, чтобы инициировать перемещение платформы с длинным ходом и платформы с коротким ходом в требуемом направлении перемещения посредством сначала перемещения платформы с длинным ходом в противоположном направлении, которое является противоположным требуемому направлению перемещения, и/или перемещения платформы с коротким ходом в требуемом направлении перемещения в течение предварительно определенного интервала времени и на расстояние, меньшее, чем расстояние между ферромагнитным центральным элементом и ближайшим актуатором в неподвижном состоянии платформы с длинным ходом, и затем перемещения платформы с длинным ходом в требуемом направлении перемещения.
В еще одном дополнительном аспекте настоящего изобретения представляется соответствующий способ управления для использования в таком позиционирующем устройстве.
В еще одном аспекте настоящего изобретения предоставляется компьютерная программа, которая содержит средство программного кода, чтобы побуждать компьютер выполнять этапы способа управления, когда упомянутая компьютерная программа выполняется на компьютере.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения. Следует понимать, что заявленные управляющее устройство, способ управления и компьютерная программа имеют аналогичные и/или идентичные предпочтительные варианты осуществления, что и заявленное позиционирующее устройство, и как определено в зависимой формуле изобретения.
Настоящее изобретение основывается на идее предоставления конфигурации уложенных друг на друга платформ из платформы с длинным ходом и платформы с коротким ходом. Предпочтительно, платформа с коротким ходом является верхней 6 DOF (степеней свободы) плавающей платформой, а нижняя платформа является платформой с длинным ходом, которая выполняет усилие, чтобы ускорять полную массу обеих платформ в некотором направлении перемещения. Хотя платформа наверху не перемещается относительно нижней платформы и, таким образом, не выполняет физическую работу, она должна формировать усилие, чтобы ускорять верхнюю платформу в том же направлении. Типично, усилие создается посредством формирования тока через катушку индуктивности электромагнитного актуатора и, таким образом, формирования тепла. Настоящее изобретение преодолевает эту проблему, используя зависимость от зазора результирующей силы нулевого тока двух противоположных актуаторов, установленных на платформе с коротким ходом или платформе с длинным ходом.
В частности, зависимость от зазора результирующего усилия двух противоположных актуаторов, которые предпочтительно являются гибридными реактивными актуаторами, используется, чтобы ограничивать потребление энергии этих актуаторов во время ускорения в направлении актуаторов. Чтобы использовать эту зависимость от зазора актуаторов, зазор между, по меньшей мере, частью платформы с коротким ходом и платформой с длинным ходом в направлении перемещения ускорения активно изменяется посредством одной из платформ, предпочтительно посредством платформы с длинным ходом, так что результирующее усилие двух противоположных актуаторов ускоряет другую платформу, в предпочтительном варианте осуществления платформу с коротким ходом, в требуемом направлении перемещения. Не нужен совсем, или нужен только небольшой ток, чтобы создавать это усилие, следовательно, тепло не формируется, чтобы создавать это усилие.
В целом, часть платформы с длинным ходом позиционирующего устройства и платформы с коротким ходом могут быть поменяны местами, также как и последовательность движения, т.е., несколько вариантов осуществления размещения платформ и хронологического порядка перемещения платформ возможны согласно настоящему изобретению. В частности, любая последовательность перемещения, которая обеспечивает, то, что во время первоначального ускорения в противоположном направлении от требуемого направления перемещения ускоряемая платформа (в частности, ее ферромагнитный центральный элемент) находится в ассиметричном, со смещенным центром (несбалансированном) состоянии относительно актуаторов, может быть использована согласно настоящему изобретению для управления ходами. Дополнительно, та же идея может быть использована для замедления.
Предложенное позиционирующее устройство предпочтительно использует гибридные актуаторы магнитного сопротивления в качестве актуаторов в платформе длинного хода или короткого хода, при этом актуаторы являются гибридными вследствие использования постоянного магнита. В другом варианте осуществления используются актуаторы без постоянного магнита, т.е., реактивные актуаторы. Такие гибридные реактивные актуаторы и их использование в активации короткого хода и активации длинного хода, в целом, известны, например, из вышеупомянутых WO 2007/057842 A1 и Vrijsen N. H., "Comparison of linear voice coil and reluctance actuators for high-precision applications", Power Electronics and Motion Control Conference (EPE/PEMC), 2010 год, 14-я международная конференция, 6-8 сентября 2010 года, причем эти документы объединены в данный документ по ссылке.
Настоящее изобретение имеет преимущество параметра увеличенного срока службы, поскольку вследствие сниженных требований к охлаждению задаются сниженные требования к шлангам системы охлаждения, которые обычно имеют ограниченный срок службы. Дополнительно, динамическая характеристика увеличивается, поскольку вследствие отсутствия необходимости в шлангах системы охлаждения, которые формируют непредсказуемую механическую связь с платформой ниже, характеристика верхней платформы улучшается. Кроме того, сложность системы и стоимость уменьшаются вследствие уменьшенного числа шлангов к платформе. Наконец, позиционирующее устройство является стерильным, поскольку водяные рукава потребляют большую часть баланса по выбросу газов в вакуумной системе.
Как правило, ярмо может иметь любую форму. В варианте осуществления каждое из ярем имеет E-образную форму, U-образную форму или C-образную форму, которые хорошо направляют магнитный поток в требуемом направлении.
Предпочтительно, каждое из ярем имеет E-образную форму, а магнит является постоянным магнитом, размещенным сверху центральной части соответствующего ярма, которая представляет совершенно пассивный вариант осуществления. Этот вариант осуществления предусматривает, что ток не требуется.
В другом варианте осуществления каждое из ярем имеет E-образную форму, и магнит является электромагнитом, сформированным посредством катушки индуктивности, намотанной вокруг центральной части соответствующего ярма. Этот вариант осуществления предусматривает, что актуатор является более эффективным, поскольку может быть получен очень маленьким, и чем меньше зазор, тем более эффективен актуатор.
В еще одном варианте осуществления каждое из ярем имеет E-образную форму, а магнит содержит постоянный магнит, размещенный сверху центральной части соответствующего ярма, и электромагнит, сформированный посредством катушки индуктивности, намотанной вокруг центральной части соответствующего ярма, т.е., используются гибридные реактивные актуаторы. В этой практической конфигурации короткие ходы платформы с коротким ходом инициируются с помощью гибридных реактивных актуаторов, состоящих из ярма в E-образной форме с катушкой индуктивности, намотанной вокруг средней части E-образного ярма, и с постоянным магнитом, размещенным сверху средней части E-образной формы. Тяговое усилие нулевого тока такого гибридного актуатора, вызываемое постоянным магнитом, компенсируется силой тяжести в вертикальных направлениях и вторым гибридным актуатором, тянущим в противоположном направлении для горизонтальных направлений. Два противоположных усилия являются равными только при одном конкретном размере зазора. При всех других размерах зазора результирующее усилие остается на платформе с коротким ходом. Это также имеет место, если только постоянный магнит используется в качестве магнита в актуаторах.
Дополнительно, в варианте осуществления позиционирующее устройство, имеющее катушки индуктивности, намотанные вокруг центральной части ярма, дополнительно содержит источник тока для предоставления тока катушкам индуктивности для стабилизации и/или управления позицией ферромагнитного центрального элемента.
В случае U-образных или C-образных ярем магнит может быть предусмотрен везде в ярме, пока направление полюсов "север-юг" магнита совпадает с путем магнитного потока через ярмо.
В предпочтительном варианте осуществления блок управления конфигурируется, чтобы инициировать перемещение платформы с длинным ходом в требуемом направлении движения посредством первого перемещения платформы с длинным ходом в противоположном направлении и/или посредством перемещения платформы с коротким ходом в требуемом направлении движения в течение такого предварительно определенного времени и на такое расстояние, что ферромагнитный центральный элемент не приводится в соприкосновение с актуатором. С этой целью блок управления может быть предварительно запрограммирован, или может быть обеспечено адаптивное управление (на лету). В еще одном варианте осуществления дополнительная система с обратной связью (контур управления) предоставляется для того, чтобы управлять или стабилизировать зазоры мотора. Например, система с обратной связью имеет сумму двух токов актуатора короткого хода в качестве входных данных, а ее выходные данные прибавляются к заданной координате длинного хода.
Преимущественно, блок управления содержит актуатор движения для выполнения движения платформы с длинным ходом и/или платформы с коротким ходом и контроллер для управления актуатором движения. Любой вид актуатора может быть предусмотрен для этой цели.
Предпочтительно, два актуатора устанавливаются на несущий элемент платформы с длинным ходом, а ферромагнитный центральный элемент устанавливается на несущий элемент платформы с коротким ходом. Альтернативно, два актуатора устанавливаются на несущий элемент платформы с коротким ходом, а ферромагнитный центральный элемент устанавливается на несущий элемент платформы с длинным ходом.
Краткое описание чертежей
Эти и другие аспекты изобретения будут поняты и разъяснены со ссылкой на вариант(ы) осуществления, описанные далее в данном документе. На следующих чертежах:
Фиг. 1 показывает схематичный чертеж варианта осуществления установки электронно-лучевой литографии для формирования интегральных схем, включающей в себя позиционирующее устройство согласно настоящему изобретению.
Фиг. 2A показывает схематичный чертеж варианта осуществления позиционирующего устройства согласно настоящему изобретению на первоначальной стадии,
Фиг. 2B показывает график кривых движения платформы с коротким ходом и платформы с длинным ходом в динамике по времени, указывающий первоначальную стадию во время фазы ускорения движения,
Фиг. 3A-C показывают графики заданных координат платформы с длинным ходом и платформы с коротким ходом, зазор между платформами и результирующее усилие нулевого тока,
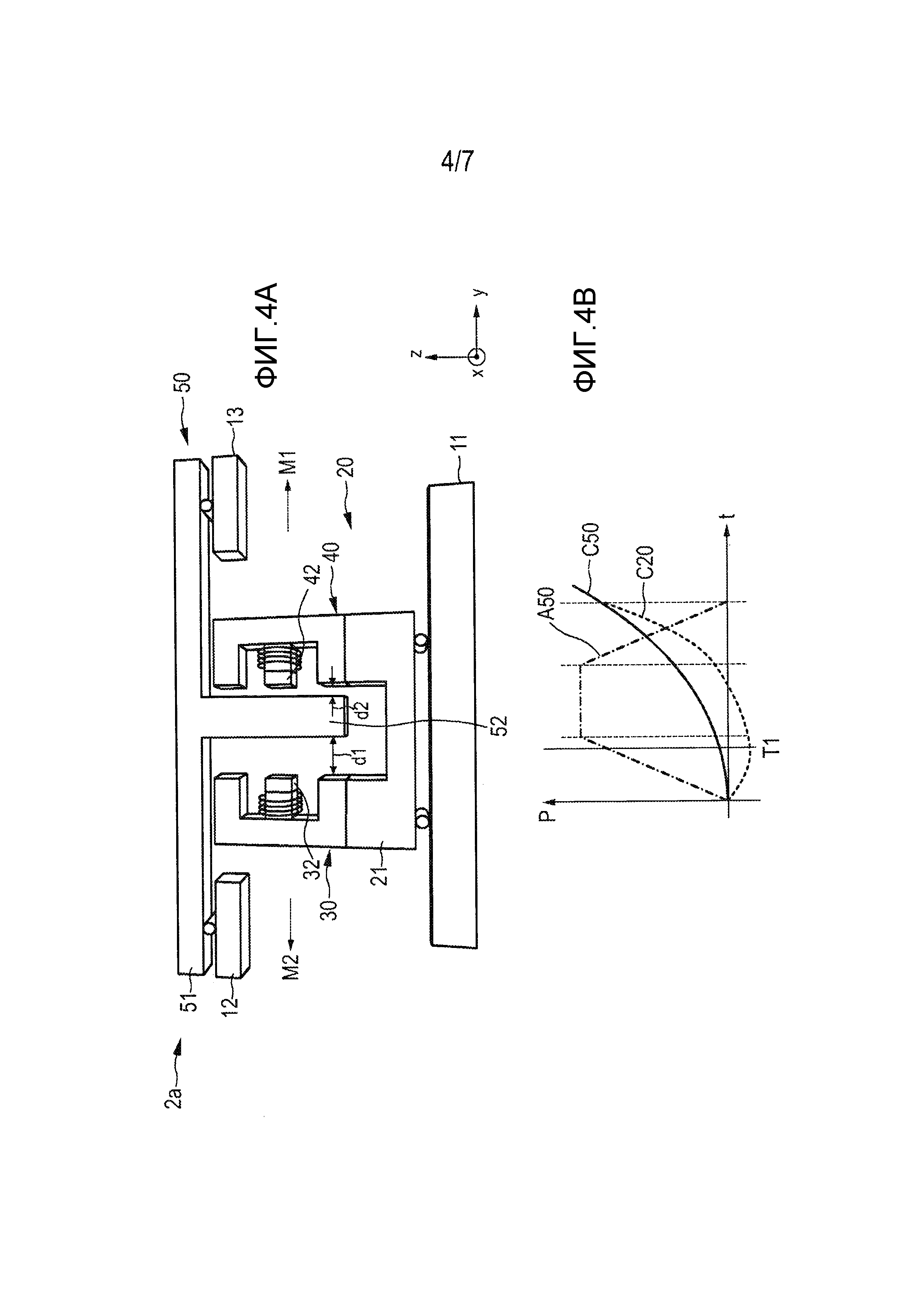
Фиг. 4A показывает схематичный чертеж позиционирующего устройства, показанного на фиг. 2, на первой стадии перемещения,
Фиг. 4B показывает график кривых перемещения платформы с коротким ходом и платформы с длинным ходом в динамике по времени, указывающий первую стадию перемещения,
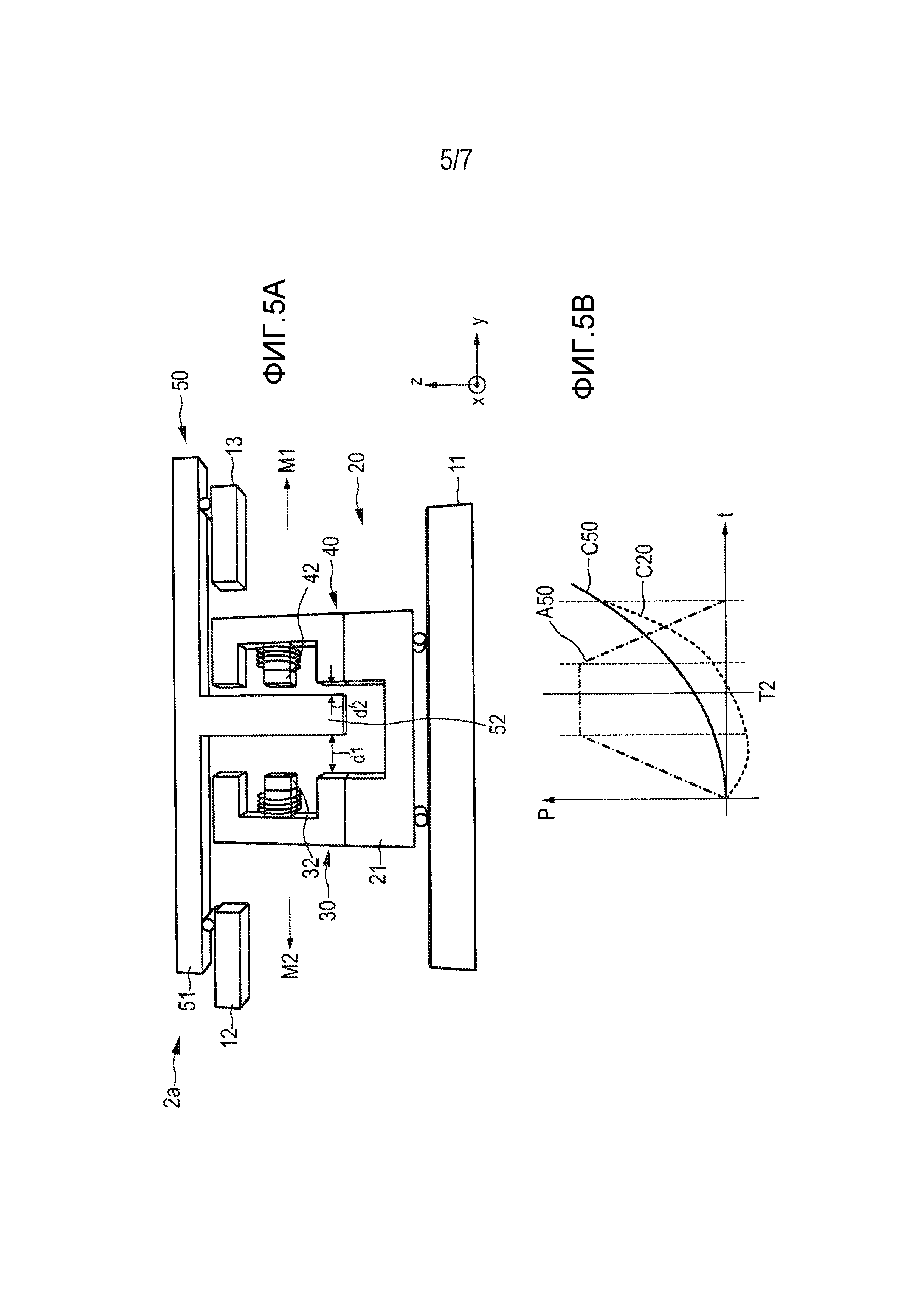
Фиг. 5A показывает схематичный чертеж позиционирующего устройства, показанного на фиг. 2, на второй стадии перемещения,
Фиг. 5B показывает график кривых перемещения платформы с коротким ходом и платформы с длинным ходом по времени, указывающий вторую стадию перемещения,
Фиг. 6A показывает схематичный чертеж позиционирующего устройства, показанного на фиг. 2, на третьей стадии перемещения,
Фиг. 6B показывает график кривых перемещения платформы с коротким ходом и платформы с длинным ходом в динамике по времени, указывающий третью стадию перемещения, и
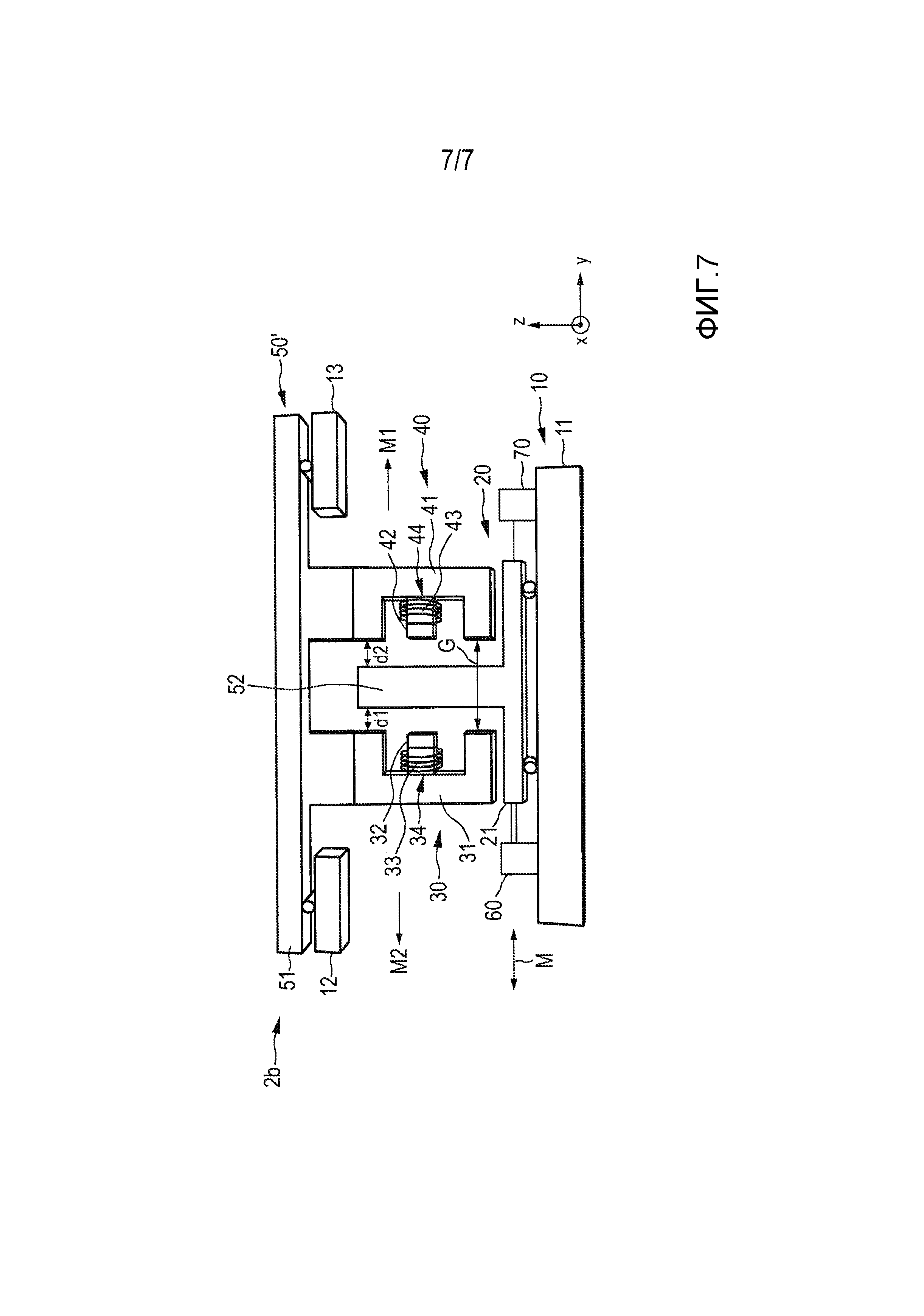
Фиг. 7 показывает схематичный чертеж другого варианта осуществления позиционирующего устройства согласно настоящему изобретению на первоначальной стадии.
Осуществление изобретения
Фиг. 1 показывает схематичный чертеж установки 1 электронно-лучевой литографии для формирования интегральных схем, включающей в себя позиционирующее устройство 2 (также называемое платформой для заготовки для интегральных схем) согласно настоящему изобретению. Установка 1 электронно-лучевой литографии для формирования интегральных схем дополнительно содержит источник 3 света (в частности, лазер), который испускает световой луч 4 в направлении промежуточного фотошаблона (маски), удерживаемого посредством платформы 6 промежуточного фотошаблона. Луч света затем преобразуется посредством проекционной линзы 7 в сфокусированный луч 8, который фокусируется на заготовку 9 для интегральных схем, расположенную сверху позиционирующего устройства 2. Чтобы обеспечивать высокую точность в позиционировании заготовки 9 для интегральных схем, позиционирующее устройство 2 содержит две платформы, уложенные друг на друга, в частности платформу 10 с коротким ходом, уложенную на платформу 20 с длинным ходом. В примерном варианте осуществления платформа 10 с коротким ходом имеет миллиметровый диапазон с нанометровой точностью, в то время как платформа 20 с длинным ходом имеет сантиметровый или метровый диапазон с субмикрометрической точностью. Между двумя платформами предусмотрены z-актуаторы 80 в этом примерном варианте осуществления для обеспечения перемещений платформы 50 с коротким ходом в z-направлении, а между платформой 20 с длинным ходом и несущим элементом 11 платформы с длинным ходом предусмотрены один или более магнитных подшипников 90.
Обычно актуаторы с катушкой индуктивности линейного электропривода (Лоренца) применяются для высокоточных прикладных задач вследствие низкой вариации усилия с движением. В настоящее время производительность и точность являются основными проблемами в развитии новых установок электронно-лучевой литографии для формирования интегральных схем. Чтобы увеличивать производительность, вес платформы с коротким ходом будет уменьшен, и, следовательно, платформа для заготовки для интегральных схем не может рассматриваться как жесткое твердое тело. Чтобы управлять динамикой в z-направлении, рассматриваются реактивные актуаторы, и было обнаружено, что рассеивание мощности реактивного актуатора с C-образным сердечником может быть гораздо ниже по сравнению с актуаторами с катушками индуктивности линейного электропривода.
Более того, другие топологии реактивного актуатора исследуются, например, актуаторы, которые могут прикладывать усилие в двух направлениях, или актуаторы, которые являются предварительно отклоняющими с помощью постоянных магнитов. Двустороннее усилие необходимо для этой прикладной задачи, и посредством предварительного отклонения рассеяние статической энергии может быть уменьшено.
Платформа с коротким ходом, которая удерживает объект, который должен быть позиционирован, часто реализуется посредством 6 DOF (степеней свободы) плавающей платформы. В некоторых вариантах осуществления платформа с коротким ходом может двигаться посредством короткого хода в x- и/или y-направлении. Однако, в другом варианте осуществления платформа с коротким ходом (т.е., верхняя платформа) может, например, иметь длинный ход в x-направлении (например, на +/- 360 мм) и короткие ходы (например, на +/- 0,3 мм) во всех других направлениях. Следовательно, эта платформа будет называться платформой с коротким Y-ходом.
Платформа с длинным ходом ниже также часто реализуется посредством 6 DOF плавающей платформы. В некоторых вариантах осуществления платформа с длинным ходом может двигаться посредством длинного хода в x- и/или y-направлении. Однако, в другом варианте осуществления платформа с длинным ходом имеет длинный ход в y-направлении (например, на +/- 150 мм) и короткий ход (например, на +/- 0,5 мм) во всех других направлениях. Следовательно, эта платформа будет называться платформой с длинным Y-ходом.
В последующем такой вариант осуществления (имеющий платформу с длинным ходом в y-направлении и платформу с коротким ходом в y-направлении) будет использован, чтобы иллюстрировать подробности настоящего изобретения. Однако, изобретение может также быть использовано в других вариантах осуществления, где короткий ход и длинный ход обеспечиваются в других направлениях.
Фиг. 2A показывает вид сбоку такого варианта осуществления позиционирующего устройства 2a согласно настоящему изобретению в первоначальном состоянии. Фиг. 2B показывает график кривых движения (т.е., позиция P перемещения по времени t) платформы 20 с коротким ходом (кривая C20 движения) и платформы 50 с длинным ходом (кривая S50 движения). Дополнительно, ускорение A50 платформы 50 с коротким ходом указывается на фиг. 2B. Первоначальное состояние указывается как T0 на фиг. 2B.
Позиционирующее устройство 2a содержит опорную структуру 10, содержащую один или более опорных элементов 11, 12, 13. Опорный элемент 11 с длинным ходом поддерживает платформу 20 с длинным ходом, а опорные элементы 12, 13 с коротким ходом поддерживают платформу 20 с коротким ходом.
Платформа 20 с длинным ходом является подвижной в направлении M перемещения (которое соответствует y-направлению в этом варианте осуществления) относительно опорного элемента 11 с длинным ходом. Она содержит несущий элемент 21 платформы с длинным ходом, который поддерживается посредством опорного элемента 11 с длинным ходом, и два актуатора 30, 40, которые имеет несущий элемент 21 платформы с длинным ходом. Актуаторы 30, 40 размещаются напротив друг друга на фиксированном расстоянии с зазором G между ними. Каждый актуатор 30, 40 содержит ферромагнитную E-образное ярмо 31, 41 и постоянный магнит 32, 33, который размещается на пути соответствующего магнитного потока соответствующего ярма 31, 41. Ось "север-юг", в частности, размещается вдоль центральной части 34, 44 соответствующего E-образного ярма 31, 41, т.е., либо северный полюс размещается на конце магнита, обращенном к ферромагнитному центральному элементу 52, а южный полюс находится на стороне, обращенной к основному стержню соответствующего ярма, либо наоборот. Дополнительно, в этом варианте осуществления предусмотрен электромагнит 33, 43, сформированный посредством катушки индуктивности, намотанной вокруг центральной части 34, 44 соответствующего ярма 31, 41.
Платформа 50 с коротким ходом также является подвижной в направлении M перемещения относительно платформы 20 с длинным ходом. Она содержит несущий элемент 51 для платформы с коротким ходом, который поддерживается посредством опорных элементов 12, 13 с коротким ходом, и ферромагнитный центральный элемент 52, который размещается между актуаторами 30, 40, т.е., в зазоре G.
В показанном первоначальном состоянии ферромагнитный центральный элемент 52 размещается по центру в зазоре G, т.е., расстояние d1 между левосторонним актуатором 30 и ферромагнитным центральным элементом 52 и расстояние d2 между правосторонним актуатором 40 и ферромагнитным центральным элементом 52 равны.
Дополнительно, блок 60 управления предусмотрен для инициирования перемещения платформы 20 с длинным ходом и платформы 50 с коротким ходом в требуемом направлении M1 перемещения. С этой целью, перемещение управляется посредством сначала перемещения платформы 20 с длинным ходом в противоположном направлении M2, которое является противоположным требуемому направлению M1 перемещения, и/или перемещения платформы 50 с коротким ходом в требуемом направлении M1 перемещения в течение предварительно определенного интервала времени и на расстояние, меньшее, чем расстояние d между ферромагнитным центральным элементом 52 и ближайшим актуатором 30, 40 в неподвижном состоянии (как показано на фиг. 2A) платформы 20 с длинным ходом, и затем перемещения платформы 20 с длинным ходом в требуемом направлении M1 перемещения. Это будет иллюстрировано более подробно ниже посредством ссылки на фиг. 3-5, показывающие различные состояния движения в хронологическом порядке.
Предложенное управление, в частности, используется, когда вся сборка платформ (содержащая обе платформы 20, 50) ускоряется в требуемом направлении перемещения (здесь в этом примере в y-направлении). В целом, платформа 20 с длинным ходом формирует усилие, достаточно большое, чтобы ускорять и платформу 20 с длинным ходом, и платформу 50 с коротким ходом. Однако, платформа 50 с коротким ходом должна формировать усилие в y-направлении, чтобы ускорять себя так быстро, как платформа 20 с длинным ходом ускоряется в y-направлении.
Чтобы создавать это усилие, зазор (указанный как d на фиг. 2A) между платформой 20 с длинным ходом и платформой 50 с коротким ходом изменяется согласно настоящему изобретению. Чтобы реализовать это, заданная координата для платформы 20 с длинным ходом в y-направлении отличается от заданной координаты для платформы 50 с коротким ходом в y-направлении. Заданная координата платформы 20 с длинным ходом вычисляется посредством получения позиции заданной координаты платформы 50 с коротким ходом и добавления необходимого зазора для формирования требуемого усилия для ускорения платформы с коротким ходом, т.е., Plong_stroke=Pshort_stroke+Pgap_offset, где Pgap_offset является ненулевым во время ускорения и является функцией, которая предпочтительно использует модель актуатора, чтобы вычислять требуемое смещение зазора.
Предпочтительно, как показано на фиг. 2A, блок 60 управления содержит актуатор 61 перемещения для выполнения перемещения платформы 20 с длинным ходом и контроллер 62 для управления актуатором 61 перемещения. Дополнительно, источник 70 тока предпочтительно предусмотрен для предоставления тока катушкам 33, 43 индуктивности для стабилизации и/или управления позицией ферромагнитного центрального элемента 52. Предпочтительно, с этой целью предусмотрено обнаруживающее позицию устройство относительно неподвижного окружения, например, интерферометрическое устройство.
Фиг. 3A показывает примерный график заданных координат платформы с длинным ходом (кривая P2) и платформы с коротким ходом (кривая P50) во время ускорения в y-направлении. Этот чертеж показывает заданную координату третьего порядка для короткого хода. Для платформы 20 с длинным ходом это приводит к перерывам в ускорении длинного хода. Если заданная координата четвертого порядка используется для короткого хода, эта проблема решается. Фиг. 3B показывает график размера зазора по времени между платформами, т.е., между ферромагнитным центральным элементом 52 и ближайшим актуатором 30 или 40 (в зависимости от направления движения). Фиг. 3C показывает график результирующего усилия нулевого тока между двумя актуаторами в динамике по времени.
Различные фазы движения иллюстрируются со ссылкой на фиг. 4-6, показывающие вариант осуществления позиционирующего устройства 2a, показанного на фиг. 2A в трех последовательных фазах движения, и график кривых движения, указывающих соответствующую позицию движения.
Фиг. 4A показывает позиционирующее устройство 2a в первой позиции движения, указанной на фиг. 4B в момент времени T1. В этой фазе движения платформа 20 с длинным ходом преднамеренно создает отклоняющее усилие, перемещаясь в противоположном направлении M2, т.е., направлении, противоположном требуемому направлению M1 движения. Это может быть видно на фиг. 4B из кривой C20 (показывающей позицию платформы с длинным ходом), находящейся ниже нулевой линии в момент времени T1. Ферромагнитный центральный элемент 52 теперь больше не размещается по центру в зазоре G, а расстояние d1 увеличилось, в то время как расстояние d2 уменьшилось. Это имеет эффект в том, что платформа 50 с коротким ходом начинает двигаться в направлении M1 движения, как указано соответствующей кривой C50 (показывающей позицию платформы с коротким ходом), находящейся выше нулевой линии в момент времени T1, как показано на фиг. 4B. Это ускоряющееся движение достигается исключительно (в оптимальном случае) посредством магнитной силы, оказываемой магнитом 42. В варианте осуществления только катушки индуктивности в качестве его магнитов, главным образом, помогают сделать реактивный актуатор более эффективным.
Платформа 20 с длинным ходом движется, например, посредством актуатора (не показан), только в течение такой продолжительности времени и/или только на такое расстояние, что платформа 50 с коротким ходом не приходит в соприкосновение с ближайшим актуатором, здесь, актуатором 40. Таким образом, после первого первоначального перемещения платформы 50 с длинным ходом в противоположном направлении M2 она впоследствии перемещается, например, посредством (непоказанного) актуатора, в требуемом направлении M1 перемещения, как указано на фиг. 5A и 5B, показывающих вторую позицию движения, указанную в момент времени T2 на фиг. 5B. В этом состоянии ускорение платформы 50 с коротким ходом является постоянным, так что она продолжает двигаться в направлении перемещения с увеличивающейся скоростью с помощью магнитного отклоняющего усилия, оказываемого магнитом 42.
Фиг. 6A показывает позиционирующее устройство 2a в третьей позиции движения, указанной на фиг. 6B в момент времени T3. В этой фазе движения ускорение платформы 50 с коротким ходом и платформы 20 с длинным ходом уменьшается до нуля (фаза толчка). После этой фазы движения скорости платформы 50 с коротким ходом и платформы 20 с длинным ходом являются постоянными, и поскольку первоначальном состоянии, показанном на фиг. 2A, ферромагнитный центральный элемент 52 размещается по центру в зазоре G, т.е., расстояния d1 и d2 равны. Следовательно, дополнительное магнитное отклоняющее усилие не оказывается магнитом 42 (или магнитом 32) на ферромагнитный центральный элемент 52.
Таким образом, позиционирующее устройство 2a, имеющее конфигурацию с актуатором длинного хода и короткого хода, используется, чтобы добиваться высокой (например, в нанометрическом диапазоне) точности позиционирования. В этом варианте осуществления актуаторы гибридного реактивного типа используются с отклоняющим потоком от постоянных магнитов. При планировании пути зазоры реактивного электромотора управляются, чтобы намеренно индуцировать отклоняющее усилие и использовать это отклоняющее усилие для инициирования движения платформы с коротким ходом. Это предоставляет преимущество в том, что электрический привод структуры платформ (может также называться мотором) требуется только для стабилизации (моторы по природе действуют в неустойчивом состоянии равновесия), приводящей в результате к практически нулевому потреблению энергии. Поскольку какая-либо другая энергия не используется, могут быть применены альтернативные способы управления актуаторами, например, манипулирование магнитным сопротивлением актуатора с E-образным сердечником.
В разновидности варианта осуществления позиционирующего устройства 2a, показанного на фиг. 2, 4-6, вместо первоначального перемещения платформы 20 с длинным ходом в противоположном направлении, чтобы добиваться формирования отклоняющего усилия с помощью магнита 42 на ферромагнитном центральном элементе, платформа 50 с коротким ходом может быть первоначально перемещена в требуемом направлении M1 перемещения, чтобы уменьшать расстояние d2. Во время этой фазы платформа 20 с длинным ходом активно не движется. Это приводит в результате, по существу, к такой же ситуации, которая показана на фиг. 4A. Таким образом, в варианте осуществления предусмотрен актуатор для выполнения этого первоначального перемещения платформы 50 с коротким ходом. Альтернативно, если предоставлены, могут быть использованы катушки 33, 43 индуктивности с этой целью. После этого, платформа 20 с длинным ходом (и потенциально также платформа 50 с коротким ходом) перемещается в требуемом направлении M1 перемещения до тех пор, пока обе платформы 20, 50 не ускорятся и не будут двигаться с постоянной скоростью.
Таким образом, для траектории постоянной скорости платформа 50 с коротким ходом движется обратно к центру относительно платформы 20 с длинным ходом. Во время замедления она движется в направлении M2 относительно платформы 20 с длинным ходом.
Замедление, в целом, работает так же, как и ускорение, но относительные перемещения происходят в противоположном направлении, чтобы создавать отклоняющее усилие в противоположном направлении.
Фиг. 7 показывает схематичный чертеж другого варианта осуществления позиционирующего устройства 2b согласно настоящему изобретению на первоначальной стадии. Это позиционирующее устройство 2b, в основном, содержит те же элементы, что и позиционирующее устройство 2a, но некоторые элементы являются взаимозаменяемыми между платформами 20, 50. В частности, два актуатора 30, 40 являются частью платформы 50 с коротким ходом и устанавливаются на несущий элемент 51 платформы с коротким ходом. Ферромагнитный центральный элемент 52 является частью платформы 20 с длинным ходом и устанавливается на несущий элемент 21 платформы с длинным ходом. Помимо этого, управление и функция позиционирующего устройства 2b практически являются такими же, что и объясненные выше для позиционирующего устройства 2a, т.е., существует также две разновидности управления, которое объяснено выше.
В конкретном варианте осуществления управление и пути заданных координат дают в результате усилия ускорения, действующие на платформу 50 с коротким ходом, обеспечиваемые обоими постоянными магнитами в дополнение к реактивным силам катушек мотора.
В альтернативном варианте осуществления пути управления и заданных координат дают в результате усилия ускорения, действующие на платформу 50 с коротким ходом, обеспечиваемые постоянными магнитами, и они являются большей частью усилий ускорения, действующих на платформу с коротким ходом.
В вариантах осуществления, изображенных на чертежах, предусмотрены как постоянные магниты 32, 42, так и электромагниты (предоставленные, в основном, катушками 33, 43 индуктивности). Для выполнения вышеописанного управления и перемещения платформ, как правило, возможно, что только постоянные магниты 32, 42 или электромагниты (предоставленные, в основном, катушками 33, 43 индуктивности) предусмотрены и используются для формирования отклоняющего усилия на некоторых стадиях перемещения.
Потенциальными областями применения настоящего изобретения являются оборудование для производства полупроводников, электронные блоки, механизация, столики для позиционирования общего пользования для позиционирования образцов и/или подложек в реакционно-способных или агрессивных средах (таким образом, в частности, требующих меньше или не требующих прокладки кабелей, искрения, смазок), позиционирующие устройства для применения в вакуумных средах и производственное оборудование.
Хотя изобретение подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такое иллюстрирование и описание должны считаться иллюстративными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации в раскрытых вариантах осуществления могут быть поняты и выполнены специалистами в данной области техники, применяющими на практике заявленное изобретение, из изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово "содержит" не исключает других элементов или этапов, и употребление элементов или этапов в единственном числе не исключает их множества. Один элемент или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, чтобы комбинация этих мер не может быть использована с выгодой.
Любые ссылочные символы в формуле изобретения не должны истолковываться как ограничивающие рамки.
Реферат
Группа изобретений относится к позиционирующему устройству, например, для использования в качестве платформы для заготовки для интегральных схем. Платформа с длинным ходом и платформа с коротким ходом укладываются друг на друга. Чтобы инициировать перемещение платформы с длинным ходом и платформы с коротким ходом в требуемом направлении перемещения платформа с длинным ходом сначала перемещается в противоположном направлении, которое является противоположным требуемому направлению движения, и/или платформа с коротким ходом сначала перемещается в требуемом направлении перемещения в течение предварительно определенного интервала времени и на расстояние, меньшее, чем расстояние между ферромагнитным центральным ходовым элементом и ближайшим одним из двух актуаторов в неподвижном состоянии платформы с длинным ходом. Затем платформа с длинным ходом перемещается в требуемом направлении перемещения. Технический результат – стабильность температуры, уменьшение потребления энергии и равномерное распределение температуры. 3 н. и 9 з.п. ф-лы, 13 ил.
Комментарии