Способ определения положения подложки в системе литографии, подложка для использования в таком способе и система литографии для выполнения такого способа - RU2659967C2
Код документа: RU2659967C2
Чертежи














Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу определения положения подложки в системе литографии, включающей в себя чувствительный элемент (датчик) оптического совмещения для испускания луча света к подложке и для измерения профиля интенсивности луча отраженного света нулевого порядка. Настоящее изобретение также относится к оптической отметке положения для использования в таком способе. Настоящее изобретение дополнительно относится к системе литографии для обработки подложки, выполненной с возможностью выполнения такого способа.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Определение положения в системах литографии является общеизвестным и обычно использует обнаружение света, отраженного в нескольких дифракционных порядках, как описывается, например, в патенте US 4967088. Недостатком определения положения с использованием света, отраженного в нескольких дифракционных порядках, является то, что светочувствительные элементы для различных дифракционных порядков должны быть точно позиционированы в системе, что увеличивает стоимость системы. Кроме того, такие системы являются чувствительными к малым погрешностям в фокусе луча света или к наклону подложки относительно луча света.
Патентный документ US 5827629 раскрывает подобную систему, в которой располагаются подложка с экспонируемой поверхностью и фотошаблон. Экспонируемая поверхность обращена к фотошаблону с некоторым зазором между ними. Подложка имеет отметку совмещения положения подложки, сформированную на экспонируемой поверхности. Отметка подложки имеет линейный или точечный источник рассеивания для рассеяния падающего света, и фотошаблон имеет отметку совмещения положения фотошаблона, имеющую линейный или точечный источник рассеивания для рассеяния падающего света. Относительное положение подложки и фотошаблона обнаруживается путем освещения отметки подложки и отметки фотошаблона и наблюдения рассеянного света от рассеянных источников отметки подложки и отметки фотошаблона. Для того, чтобы по меньшей мере частично преодолеть проблемы вышеупомянутого предшествующего уровня техники, изобретателями было предложено обеспечить подложку, включающую в себя шахматный рисунок отражающих квадратов, имеющих максимальный коэффициент отражения, и неотражающих квадратов, имеющих минимальный коэффициент отражения, в котором упомянутые квадраты имеют ширину, соответствующую диаметру поперечного сечения луча света, проецируемого на упомянутый рисунок. Путем измерения интенсивности отраженного луча нулевого порядка изменение в положении луча относительно подложки может быть определено без измерения множества дифракционных порядков. В идеале, когда пятно луча света перемещается по рисунку, интенсивность отраженного сигнала представляет собой синусоидальную функцию с высоким контрастом положения пятна луча на рисунке. Однако на практике распределение интенсивности пятна луча обычно не соответствует однородному и резко очерченному дискообразному профилю, а вместо этого следует гауссовскому профилю, и получающийся отраженный сигнал яркости не похож на синусоидальную функцию как функцию положения луча на подложке. В результате определение положения пятна луча на подложке на основе интенсивности отраженного луча становится менее точным.
Патентный документ US 7418125B2 раскрывает устройство для обнаружения положения области, соответствующей отметке, в данных изображения, в качестве отметки положения, включающей в себя периодически расположенные рисунки. Первый блок получает распределение энергии в реальном пространстве, которое соответствует распределению энергетического спектра каждой частичной области данных изображения. Блок получения распределения вероятностей получает распределение вероятностей на основе распределения энергии в реальном пространстве, указывающее периодически повторяющиеся положения периодически расположенных рисунков и интенсивность периодичности в этом положении. Второй блок получает степень корреляции между каждым распределением вероятности, полученным блоком получения распределения вероятностей и предварительно зарегистрированное распределение вероятностей отметки, а третий блок получает положение отметки на основе степеней корреляции, полученных вторым блоком.
Все вышеупомянутые способы определения положения подложки в системе литографии являются громоздкими, сложными, и страдают от недостатков, таких как неточность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение способа определения положения подложки в системе литографии, который был бы простым и обеспечивал бы очень высокую точность (включая высокую воспроизводимость и повторяемость).
Дополнительной задачей настоящего изобретения является предложить оптическую отметку положения для использования в таком способе, а также систему литографии, выполненную с возможностью выполнения такого способа.
Настоящее изобретение определяется независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения определяют выгодные варианты осуществления.
С этой целью, в соответствии с первым аспектом, настоящее изобретение предлагает подложку, включающую в себя оптическую отметку положения для считывания ее оптической записывающей головкой для излучения света, предпочтительно красного или инфракрасного света, причем оптическая отметка положения имеет высоту отметки, длину отметки и предопределенное известное положение на подложке, и оптическая отметка положения простирается вдоль продольного направления и располагается так, чтобы изменять коэффициент отражения отметки положения вдоль упомянутого продольного направления, причем оптическая отметка положения включает в себя:
- первую область, имеющую первый коэффициент отражения и первую ширину;
- вторую область, граничащую с первой областью и формирующую первую пару областей, вторая область имеет второй коэффициент отражения и вторую ширину, причем первая ширина равна второй ширине, измеренной в продольном направлении, а также второй коэффициент отражения, отличающийся от первого коэффициента отражения, причем первая область включает в себя субволновые структуры по сравнению с длиной волны света, такой как 635 нм.
Преимущество подложки по настоящему изобретению состоит в том, что обеспечение субволновых структур в первой области увеличивает допустимое отклонение качества отметки положения. Это может быть понято следующим образом. Субволновые структуры могут быть изготовлены с использованием обычной литографии или технологий обработки. Предполагая, что одна из упомянутых субволновых структур произведена неправильно или возможно даже вообще отсутствует, отметка все еще может использоваться без слишком большой потери точности. Второй эффект состоит в том, что субволновые особенности вызывают меньшую чувствительность к вариациям высоты в оптической отметке положения при использовании в настоящем изобретении. Кроме того, подложка в соответствии с настоящим изобретением имеет чрезвычайно регулярную структуру, то есть одну ширину и один интервал по всей отметке положения. Такая высокая регулярность дает отметку положения, которую намного легче проектировать, и риск погрешностей дизайна таким образом сильно уменьшается (иначе говоря, шанс того, что простая оптическая отметка положения будет разработана неправильно, гораздо ниже, чем для сложных оптических отметок положения). Кроме того, верифицируемость такого дизайна является намного более высокой. Следовательно, систематическая воспроизводимость становится намного лучше при использовании сегментированного дизайна отметки, как предписано в настоящем изобретении.
В одном варианте осуществления первая ширина равна второй ширине, измеренной в продольном направлении. Такая структура обеспечивает еще большую регулярность.
В одном варианте осуществления субволновые структуры включают в себя множество регулярных сегментов в виде полосок, проходящих в дополнительном направлении, перпендикулярном продольному направлению, причем каждый регулярный сегмент формируется первой подобластью и второй подобластью. Это является первым вариантом создания регулярных субволновых структур, и эксперименты показали, что результаты с этими отметками являются очень хорошими.
В одном варианте осуществления субволновые структуры включают в себя множество регулярных сегментов в виде полосок, проходящих в продольном направлении, причем каждый регулярный сегмент в виде полоски формируется первой подобластью и второй подобластью. Это является вторым вариантом создания регулярных субволновых структур, и эксперименты показали, что результаты с этими отметками являются очень хорошими, и даже немного лучше чем в первом варианте.
Один вариант осуществления дополнительно включает в себя множество дополнительных пар областей, причем каждая дополнительная пара областей по существу равна первой паре областей. Регулярность такой структуры является очень выгодной, как было обсуждено выше. Кроме того, чем больше пар областей, тем больше особенностей. Это выгодно в случае, если перекрестная корреляция используется для измерения смещения отметки положения относительно ожидаемого положения (то есть путем сравнения графика измеренной интенсивности с графиком ожидаемой интенсивности).
В одном варианте осуществления первая ширина и вторая ширина находятся в диапазоне от 1 мкм до 2 мкм. Преимущество этого диапазона состоит в том, что он больше, чем размер пятна обычной оптической считывающей головки, который как правило находится в диапазоне от 1 мкм до 2 мкм. Эффект состоит в том, что контраст в интенсивности отраженного луча между первой и второй областью является более высоким.
В одном варианте осуществления длина отметки составляет по меньшей мере 100 мкм. Чем больше длина отметки, тем более точно может быть определено положение отметки с использованием измерения перекрестной корреляции, то есть перекрестная корреляция более крупной области дает более высокий пик в кривой перекрестной корреляции.
В одном варианте осуществления субволновые структуры обеспечивают значение первого коэффициента отражения ниже, чем значение второго коэффициента отражения. Субволновые структуры в этом варианте осуществления эффективно поглощают луч света от оптической считывающей головки, что сильно уменьшает коэффициент отражения первой области.
В одном варианте осуществления первая пара областей и множество дополнительных пар областей образуют первую главную область. Подложка дополнительно включает в себя вторую главную область, граничащую с первой главной областью, причем вторая главная область по существу не содержит структур. Добавление второй области, которая по существу не содержит структур, увеличивает допустимое отклонение качества при изготовлении отметки оптического положения и улучшает измерение перекрестной корреляции, то есть функция перекрестной корреляции показывает более высокий и более острый пик.
В одном варианте осуществления используется третья главная область, граничащая со второй главной областью, причем вторая главная область находится между первой главной областью и третьей главной областью, если смотреть в продольном направлении. Преимущество этого варианта осуществления состоит в том, что отметка положения может быть очень легко обнаружена оптически благодаря двум разделенным областям. Это обеспечивает быструю оценку положения оптической отметки положения, например, с использованием микроскопа.
В одном варианте осуществления третья главная область формируется аналогично первой области, включающей в себя субволновые структуры. Этот вариант осуществления обеспечивает большую регулярность и таким образом меньшую зависимость от процесса, и обладает большей верифицируемостью.
В одном варианте осуществления первая главная область и третья главная область по существу идентичны. Этот вариант осуществления обеспечивает еще большую регулярность и таким образом меньшую зависимость от процесса, и обладает еще большей верифицируемостью.
В одном варианте осуществления первая область и третья область отличаются (длиной, шагом, количеством структур и т.д.). Отличие первой и второй области друг от друга обеспечивает дополнительную информацию, а именно ориентацию отметки по сравнению с направлением развертки оптической головки, то есть левая и правая сторона являются различимыми.
Один вариант осуществления дополнительно включает в себя область первого конца, расположенную на первом конце оптической отметки положения, граничащую с первой главной областью, причем область первого конца по существу не содержит структур. Добавление области конца, которая по существу не содержит структур, увеличивает допустимое отклонение качества при изготовлении отметки оптического положения и улучшает измерение перекрестной корреляции, то есть функция перекрестной корреляции показывает более высокий и более острый пик.
Один вариант осуществления дополнительно включает в себя область второго конца, расположенную на втором конце оптической отметки положения, граничащую с третьей главной областью, причем область второго конца по существу не содержит структур. Добавление области конца, которая по существу не содержит структур, увеличивает допустимое отклонение качества при изготовлении отметки оптического положения и улучшает измерение перекрестной корреляции, то есть функция перекрестной корреляции показывает более высокий и более острый пик.
В одном варианте осуществления высота отметки во много раз больше длины волны красного или инфракрасного света. В одном варианте осуществления высота отметки является максимально возможной для того, чтобы обеспечить наибольшее допустимое отклонение от заданного положения в этом направлении. Однако высота отметки предпочтительно составляет менее 40 мкм, так что она помещается в пределах разметочной линии, которая, как правило, имеет такую ширину.
С этой целью, в соответствии со вторым аспектом, настоящее изобретение предлагает систему литографии для обработки подложки в соответствии с настоящим изобретением, как определено в пунктах 1-14 формулы изобретения, включающую в себя:
- средство экспонирования подложки для того, чтобы экспонировать подложку;
- носитель подложки для приема упомянутой подложки, причем носитель подложки является подвижным относительно средства экспонирования подложки для того, чтобы обеспечить экспонирование различных частей упомянутой подложки, и
- чувствительный элемент оптического совмещения, установленный на системе таким образом, что он имеет по существу постоянное расстояние от средства экспонирования подложки, и выполненный с возможностью испускания луча света на подложку для измерения профиля интенсивности луча отраженного света нулевого порядка,
при этом система литографии выполнена с возможностью выполнения способа по настоящему изобретению.
Система литографии по настоящему изобретению использует измерение интенсивности луча отраженного света нулевого порядка, в отличие от измерений первого и высших порядков, известных в предшествующем уровне техники. Подложка по настоящему изобретению, определенная в пунктах 15-18 формулы изобретения, может удобно использоваться с подложкой по настоящему изобретению. В то время, как в решениях предшествующего уровня техники требуется некоторое линейное или синусоидальное изменение интенсивности луча отраженного света, в настоящем изобретении такие требования отсутствуют. Как будет объяснено в отношении способа по настоящему изобретению, настоящее изобретение требует только изменения коэффициента отражения, приводящего к изменению интенсивности отраженного луча. Если график интенсивности отметки положения известен, единственное, что требуется в настоящем изобретении, это сравнить график измеренной интенсивности с известным графиком интенсивности для того, чтобы определить фактическое положение оптической отметки положения.
Один вариант осуществления дополнительно включает в себя дополнительный чувствительный элемент оптического совмещения, установленный на системе таким образом, что он имеет дополнительное по существу постоянное расстояние от средства экспонирования подложки, выполненный с возможностью испускания дополнительного луча света на подложку для измерения профиля интенсивности луча отраженного света нулевого порядка, причем система литографии выполнена с возможностью сканирования упомянутым чувствительным элементом оптического совмещения в первом направлении, а также с возможностью сканирования упомянутым дополнительным чувствительным элементом оптического совмещения во втором направлении, перпендикулярном к упомянутому первому направлению. Этот вариант осуществления обеспечивает второй чувствительный элемент выравнивания в системе и использует каждый из упомянутых чувствительных элементов для сканирования только одного из упомянутых направлений. Преимущество заключается в том, что каждый из упомянутых чувствительных элементов определяет только одну координату и обеспечивает допуск для другой координаты (не измеряемой) в одно и то же время (вследствие того, что одномерная оптическая отметка положения простирается только в продольном направлении, то есть другая размерность обеспечивает допуск положения в то же самое время).
В одном варианте осуществления первое направление совпадает с направлением первого перемещения подложки в эксплуатационном использовании системы литографии, а второе направление совпадает с направлением второго перемещения подложки в эксплуатационном использовании системы литографии. Такое разделение измерений между обоими чувствительными элементами оптического совмещения является особенно выгодным в том случае, когда оба чувствительных элемента оптического совмещения помещаются на перпендикулярных осях, которые пересекаются в центре системы экспонирования подложки.
Один вариант осуществления включает в себя приводную платформу для перемещения и позиционирования упомянутого носителя подложки относительно средства экспонирования подложки. Приводная платформа эффективно дополняет систему литографии, которая может быть системой фотолитографии, системой электронно-лучевой литографии и системой ионно-лучевой литографии.
В одном варианте осуществления средство экспонирования подложки включает в себя оптическую колонну, выполненную с возможностью проецирования одного или более экспонирующих лучей на подложку, причем упомянутые чувствительные элементы совмещения крепятся к оптической колонне.
В одном варианте осуществления оптическая колонна выполнена с возможностью проецирования множества экспонирующих лучей заряженных частиц, таких как электронные лучи, на подложку.
С этой целью в соответствии с третьим аспектом настоящее изобретение предлагает способ определения положения подложки в системе литографии, включающей в себя чувствительный элемент оптического совмещения для испускания луча света к подложке и для измерения профиля интенсивности луча отраженного света нулевого порядка. Этот способ включает в себя:
- обеспечение подложки, включающей в себя оптическую отметку положения, имеющую ширину отметки, длину отметки и предопределенное известное положение на подложке, простирающуюся вдоль продольного направления и выполненную с возможностью изменения коэффициента отражения отметки положения вдоль упомянутого продольного направления;
- перемещение подложки таким образом, что оптическая отметка положения находится по существу около чувствительного элемента оптического совмещения в соответствии с предполагаемым положением оптической отметки положения относительно чувствительного элемента оптического совмещения;
- сканирование оптической отметки положения вдоль пути развертки в продольном направлении с помощью чувствительного элемента оптического совмещения для того, чтобы получить измеренный профиль интенсивности, имеющий длину развертки, причем длина развертки больше, чем длина отметки;
- сравнение измеренного профиля интенсивности с ожидаемым профилем интенсивности, связанным с оптической отметкой положения, для того, чтобы определить разность между фактическим положением оптической отметки положения и предполагаемым положением, и
- определение фактического положения отметки положения из пути развертки и упомянутой разности.
Этот способ обеспечивает быстрый и эффективный путь определения положения подложки (определяется одна координата, например x-координата или y-координата). В системах литографии интерферометры могут использоваться для определения положения держателя или подложки на держателе относительно проекционной оптики. Кроме того, система литографии снабжается по меньшей мере одним чувствительным элементом оптического совмещения, причем в текущем способе этот чувствительный элемент оптического совмещения предпочтительно имеет постоянное и известное расстояние относительно средства экспонирования подложки в системе литографии. Если оптический маркер положения известен, профиль интенсивности этого маркера может быть измерен или смоделирован, что обеспечивает ожидаемый профиль интенсивности. Интересный аспект этого способа заключается в том, что сначала необходимо лишь оценить положение подложки относительно чувствительного элемента оптического совмещения, то есть оно должно быть известно с ограниченной точностью, например ±20 мкм. Допустимая величина этой неточности определяется главным образом шириной отметки в поперечном направлении. Используя это предполагаемое положение, подложка перемещается таким образом, чтобы оптическая отметка положения оказалась по существу около чувствительного элемента оптического совмещения. Чувствительный элемент оптического совмещения затем сканирует оптическую отметку положения с длиной развертки большей, чем длина отметки, для того, чтобы получить измеренный профиль интенсивности. Этот измеренный профиль интенсивности создает допуск для неточности предполагаемого положения в продольном направлении. На следующей стадии измеренный профиль интенсивности сравнивается с ожидаемым профилем интенсивности. В большинстве случаев измеренный профиль интенсивности будет до некоторой степени сдвинутой (но возможно несколько искаженной) версией ожидаемого профиля интенсивности, причем сдвиг указывает на фактическое положение оптической отметки положения относительно чувствительного элемента оптического совмещения. Этот сдвиг, в совокупности с начальным положением развертки, обеспечивает фактическое положение одного конца отметки положения. В вариантах осуществления положение центра оптической отметки положения будет рассматриваться как положение оптической отметки положения.
Неопубликованная международная патентная заявка WO 2012/144904 описывает подложку для использования в системе литографии. Упомянутая подложка снабжена по меньшей мере частично отражающей отметкой положения, включающей в себя массив структур. Массив простирается вдоль продольного направления отметки. Упомянутые структуры организуются так, чтобы изменять коэффициент отражения отметки вдоль продольного направления, причем упомянутый коэффициент отражения определяется для предопределенной длины волны. Настоящая патентная заявка предлагает усовершенствование по сравнению с публикацией WO 2012/144904.
В одном варианте осуществления способа этап сравнения измеренного профиля интенсивности с ожидаемым профилем интенсивности включает в себя:
- вычисление функции перекрестной корреляции между упомянутыми профилями, и
- определение положения максимума в упомянутой функции перекрестной корреляции, в которой упомянутое положение указывает на упомянутую разность. Первое преимущество этого варианта осуществления состоит в том, что он намного менее чувствителен к маркеру, если известен маркер, а также ожидаемый профиль интенсивности, связанный с этим маркером. В соответствии с настоящим изобретением может использоваться даже простой маркер, тогда как в решении предшествующего уровня техники существует намного больше требований к маркеру. Кроме того, этот способ является менее чувствительным к точности ожидаемого профиля интенсивности. Перекрестная корреляция является очень выгодным способом определения сдвига между упомянутыми профилями интенсивности, в частности когда имеется большая «деформация» или рассогласование профиля интенсивности, при сравнении ожидаемого профиля интенсивности с измеренным профилем интенсивности.
В одном варианте осуществления этого способа на этапе обеспечения подложки подложка включает в себя дополнительную оптическую отметку положения, имеющую ширину дополнительной отметки, длину дополнительной отметки и предопределенное известное положение дополнительной отметки на подложке, причем дополнительная оптическая отметка положения простирается вдоль дополнительного продольного направления и выполнена с возможностью изменения дополнительного коэффициента отражения дополнительной отметки положения вдоль упомянутого дополнительного продольного направления, которое является ортогональным к упомянутому продольному направлению, причем оптическая отметка положения и дополнительная оптическая отметка положения образуют пару отметок положения, причем этот способ после этапа сканирования оптической отметки положения дополнительно включает в себя этапы:
- перемещения подложки таким образом, чтобы дополнительная оптическая отметка положения находилась по существу около чувствительного элемента оптического совмещения в соответствии с предполагаемым положением дополнительной оптической отметки положения относительно чувствительного элемента оптического совмещения;
- сканирования дополнительной оптической отметки положения вдоль дополнительного пути развертки в дополнительном продольном направлении с помощью чувствительного элемента оптического совмещения для того, чтобы получить дополнительный измеренный профиль интенсивности, имеющий дополнительную длину развертки, причем дополнительная длина развертки больше, чем длина отметки;
- сравнения дополнительного измеренного профиля интенсивности с дополнительным ожидаемым профилем интенсивности, связанным с дополнительной оптической отметкой положения, для того, чтобы определить дополнительную разность между дополнительным фактическим положением дополнительной оптической отметки положения и дополнительным предполагаемым положением, и
- определения дополнительного фактического положения дополнительной отметки положения из дополнительного пути развертки и упомянутой дополнительной разности. Оптическая отметка положения в соответствии с настоящим изобретением обеспечивает только одну координату оптической отметки положения (а именно на первой оси, проходящей в продольном направлении оптической отметки положения). Этот вариант осуществления обеспечивает вторую координату положения, соответствующую оси во втором направлении, перпендикулярном к первой оси первой координаты.
В одном варианте осуществления способа этап сравнения дополнительного измеренного профиля интенсивности с дополнительным ожидаемым профилем интенсивности включает в себя:
- вычисление дополнительной функции перекрестной корреляции между упомянутыми профилями, и
- определение дополнительного положения максимума в упомянутой дополнительной функции перекрестной корреляции, в которой упомянутое дополнительное положение указывает на упомянутую разность.
Первое преимущество этого варианта осуществления состоит в том, что он намного менее чувствителен к маркеру, если известен маркер, а также ожидаемый профиль интенсивности, связанный с этим маркером. В соответствии с настоящим изобретением может использоваться даже простой маркер, тогда как в решении предшествующего уровня техники существует намного больше требований к маркеру. Кроме того, этот способ является менее чувствительным к точности ожидаемого профиля интенсивности. Перекрестная корреляция является очень выгодным способом определения сдвига между упомянутыми профилями интенсивности, в частности когда имеется большая «деформация» или рассогласование профиля интенсивности, при сравнении ожидаемого профиля интенсивности с измеренным профилем интенсивности.
В одном варианте осуществления этого способа система литографии включает в себя дополнительный чувствительный элемент оптического совмещения для испускания дополнительного луча света на подложку и для измерения профиля интенсивности луча отраженного света нулевого порядка, и выполнена с возможностью сканирования упомянутым чувствительным элементом оптического совмещения только в первом направлении, а также с возможностью сканирования упомянутым дополнительным чувствительным элементом оптического совмещения только во втором направлении, перпендикулярном к упомянутому первому направлению,
причем на этапе обеспечения подложки продольное направление оптической отметки положения совпадает с первым направлением, а дополнительное продольное направление дополнительной оптической отметки положения совпадает со вторым направлением,
причем на соответствующих этапах сканирования чувствительный элемент оптического совмещения используется для сканирования оптической отметки положения, а дополнительный чувствительный элемент оптического совмещения используется для сканирования дополнительной оптической отметки положения. Преимущество заключается в том, что каждый из упомянутых чувствительных элементов определяет только одну координату и обеспечивает допуск для другой координаты (не измеряемой) в одно и то же время (вследствие того, что одномерная оптическая отметка положения простирается только в продольном направлении, то есть другая размерность обеспечивает допуск положения в то же самое время).
В одном варианте осуществления способа первое направление совпадает с направлением первого перемещения подложки в эксплуатационном использовании системы литографии, а второе направление совпадает с направлением второго перемещения подложки в эксплуатационном использовании системы литографии. Такое разделение измерений между обоими чувствительными элементами оптического совмещения является особенно выгодным в том случае, когда оба чувствительных элемента оптического совмещения помещаются на перпендикулярных осях, которые пересекаются в центре системы экспонирования подложки.
В одном варианте осуществления способа на этапе обеспечения подложки подложка включает в себя вторую пару оптических отметок положения, расположенную в различных местах на подложке, причем вторая пара оптических отметок положения подобна первой паре оптических отметок положения, и причем способ повторяется для упомянутой второй пары оптических отметок положения. Этот вариант осуществления позволяет измерять вращательную ориентацию подложки.
Различные аспекты и особенности, описанные и показанные в данном описании, могут быть применены индивидуально везде, где это возможно. Эти индивидуальные аспекты, в частности аспекты и особенности, описанные в зависимых пунктах прилагаемой формулы изобретения, могут быть сделаны предметом выделенных патентных заявок.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет объяснено на основе примерного варианта осуществления, показанного в прилагаемых чертежах, в которых:
Фиг. 1 показывает систему литографии предшествующего уровня техники, в которой может использоваться подложка в соответствии с настоящим изобретением,
Фиг. 2 показывает систему позиционирования предшествующего уровня техники для определения положения мишени относительно оптической колонны,
Фиг. 3 схематично показывает позиционирующее устройство, выполненное с возможностью обеспечения луча для взаимодействия с подложкой в соответствии с настоящим изобретением, а также для обнаружения интенсивности отражения упомянутого луча в упомянутой подложке, и
Фиг. 4 показывает схематические подробности позиционирующего устройства в соответствии с настоящим изобретением,
Фиг. 5 показывает часть системы литографии в соответствии с настоящим изобретением;
Фиг. 6 показывает смоделированный профиль интенсивности, принадлежащий подложке, включающей в себя оптическую отметку положения в соответствии с настоящим изобретением;
Фиг. 7 показывает измеренный профиль интенсивности, использующий систему литографии в соответствии с настоящим изобретением;
Фиг. 8 показывает расчетную функцию перекрестной корреляции между профилями, изображенными на Фиг. 6 и Фиг. 7;
Фиг. 9 схематично показывает подложку, включающую в себя оптическую отметку положения в соответствии с настоящим изобретением;
Фиг. 10 показывает другой вариант осуществления оптической отметки положения в соответствии с настоящим изобретением вместе с измеренными профилями интенсивности такой отметки для различных многослойных масок;
Фиг. 11 показывает увеличенный вид профилей, изображенных на Фиг. 10, причем увеличенный вид ограничен заштрихованным прямоугольником, изображенным на Фиг. 10;
Фиг. 12 показывает другой вариант осуществления оптической отметки положения в соответствии с настоящим изобретением вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок;
Фиг. 13 показывает другой вариант осуществления оптической отметки положения в соответствии с настоящим изобретением вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок;
Фиг. 14 показывает другой вариант осуществления оптической отметки положения в соответствии с настоящим изобретением вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок;
Фиг. 15 показывает другой вариант осуществления оптической отметки положения, включающей в себя субволновые особенности в соответствии с настоящим изобретением, вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок;
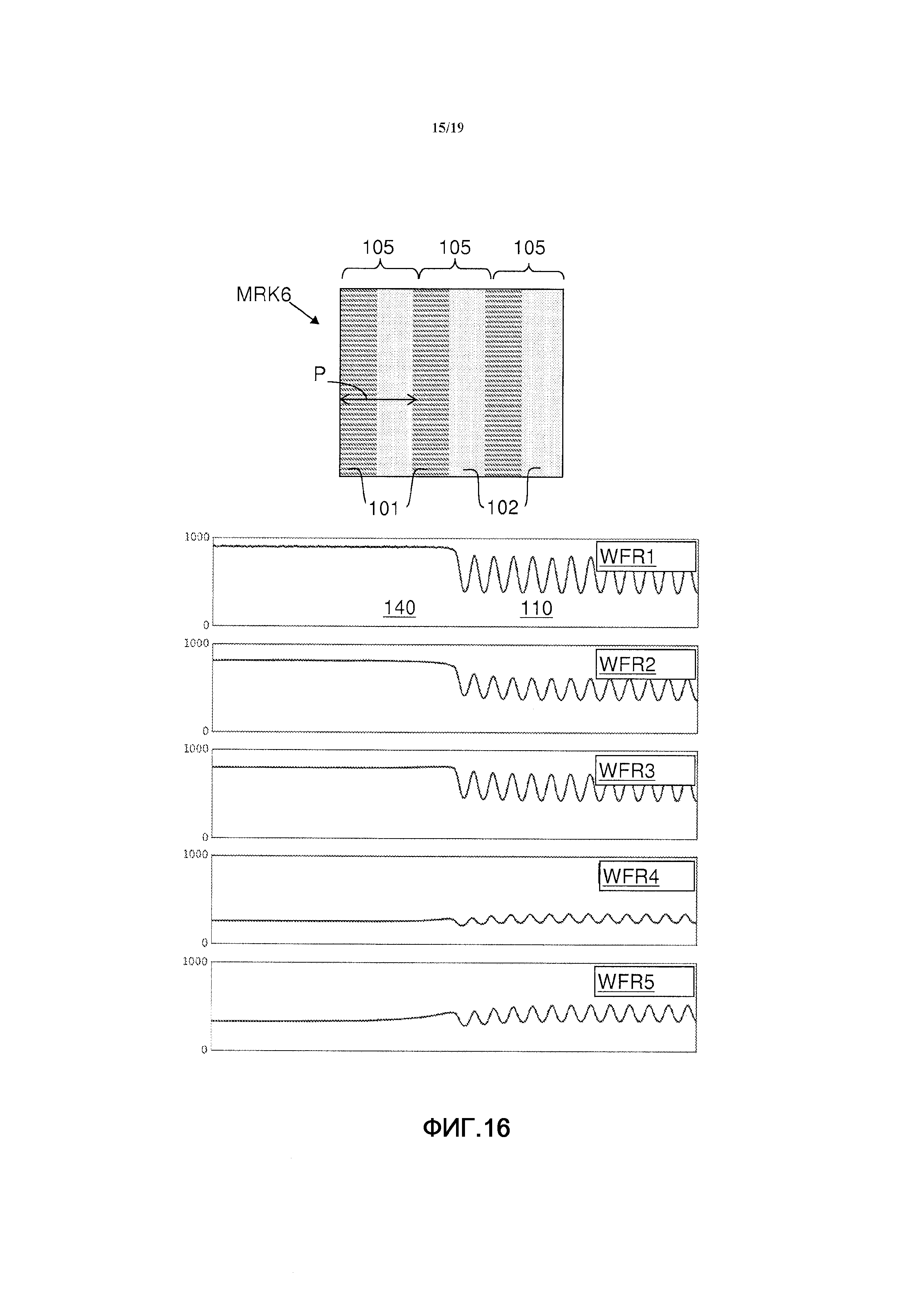
Фиг. 16 показывает другой вариант осуществления оптической отметки положения, включающей в себя субволновые особенности в соответствии с настоящим изобретением, вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок;
Фиг. 17 показывает другой вариант осуществления оптической отметки положения, включающей в себя субволновые особенности в соответствии с настоящим изобретением, вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок;
Фиг. 18 показывает результаты воспроизводимости оптических отметок положения, изображенных на Фиг. 10, 12, 13, 14, 15, 16 и 17, для каждого чувствительного элемента оптического совмещения в системе литографии;
Фиг. 19 показывает результаты точности оптических отметок положения, изображенных на Фиг. 10, 12, 13, 14, 15, 16 и 17, для каждого чувствительного элемента оптического совмещения в системе литографии; и
Фиг. 20 показывает более подробный вид оптической отметки положения, изображенной на Фиг. 9.
СПИСОК ССЫЛОЧНЫХ ЦИФР
2 - источник;
3 - луч заряженных частиц;
4 - коллиматор;
5 - массив отверстий;
6 - множество элементарных лучей заряженных частиц;
7 - массив конденсоров;
8 - массив гасителей луча;
9 - массив ограничителей луча;
10 - дефлектор сканирования;
11 - массив фокусирующих линз;
12 - мишень (т.е. подложка);
13 - подвижный носитель мишени;
14 - оптическая колонна;
L - направление длинного хода;
S - направление короткого хода;
15, 16 - формовочные линейки или зеркала;
21a, 21b,
23a, 23b - один или более лучей;
20, 22 - интерферометры;
P1, P2, P3 - соответствующие точки мишени;
500 - позиционирующее устройство;
550 - пятно луча;
513 - подложка (= мишени 12);
571 - поглощающие луч структуры;
511 - луч света;
536 - расщепитель луча;
512 - фокусирующая линза;
519 - детектор интенсивности луча (фотодиод);
560 - график;
531 - источник луча;
534 - лазер;
532 - оптоволокно;
533 - оптическая система;
535 - коллиматорная линза;
518 - отраженный луч;
536’ - поляризационный расщепитель луча;
511’ - поляризованный луч света;
538 - поляризатор;
539 - четвертьволновая пластина;
PO - проекционная оптика;
SMRK - первая отметка положения (для измерения только одной координаты);
DMRK - вторая отметка положения (для измерения только одной координаты);
Xw - х-координата подложки;
Yw - y-координата подложки;
SS - первый чувствительный элемент оптического совмещения;
DS - второй чувствительный элемент оптического совмещения;
OO - центр проекционной оптики (источник);
Rz - угловая ошибка держателя вокруг оси Z;
LN - дорожка;
I - интенсивность света;
CRC - коэффициент перекрестной корреляции;
TPR - верхняя область кривой перекрестной корреляции;
100 - оптическая отметка положения;
101 - первая область, имеющая первый коэффициент отражения;
102 - вторая область, имеющая второй коэффициент отражения;
105 - пары областей;
110 - первая главная область;
120 - вторая главная область;
130 - третья главная область;
140 - области конца;
ML - длина отметки;
MH - высота отметки;
W - ширина первой области;
SWS - субволновые структуры;
PSW - шаг субволновых структур;
P - шаг пар областей;
100-1 - оптическая отметка положения без субволновых структур;
100-2 - оптическая отметка положения с субволновыми структурами, имеющими продольную сегментацию;
100-3 - оптическая отметка положения с субволновыми структурами, имеющими поперечную сегментацию;
WFR1 - первая полупроводниковая пластина (подложка), не имеющая маскирующих слоев;
WFR2 - вторая полупроводниковая пластина (подложка), имеющая тонкую многослойную маску;
WFR3 - третья полупроводниковая пластина (подложка), имеющая более толстую многослойную маску;
WFR4 - четвертая полупроводниковая пластина (подложка), имеющая еще более толстую многослойную маску;
WFR5 - пятая полупроводниковая пластина (подложка), имеющая самую толстую многослойную маску;
MRK1 - первая оптическая отметка положения (шаг 1 мкм, несегментированная);
MRK2 - вторая оптическая отметка положения (шаг 2 мкм, несегментированная);
MRK3 - третья оптическая отметка положения (шаг 3 мкм, несегментированная);
MRK4 - четвертая оптическая отметка положения (шаг 4 мкм, несегментированная);
MRK5 - пятая оптическая отметка положения (шаг 2 мкм, продольно сегментированная);
MRK6 - шестая оптическая отметка положения (шаг 2 мкм, поперечно сегментированная);
MRK7 - седьмая оптическая отметка положения (шаг 2 мкм, сегментированная как продольно, так и поперечно).
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Известная система литографии показана на Фиг. 1. Система 1 литографии включает в себя источник 2 луча заряженных частиц, который испускает луч 3 заряженных частиц. Луч 3 заряженных частиц проходит через коллиматор 4 прежде, чем попасть на массив 5 отверстий. Массив отверстий расщепляет луч на множество элементарных лучей 6 заряженных частиц, которые сжимаются массивом 7 конденсоров. На массиве 8 гасителей луча индивидуальные элементарные лучи могут быть погашены, то есть могут быть индивидуально отклонены таким образом, что они столкнутся позже с массивом 9 ограничителей луча на своих траекториях вместо того, чтобы пройти через отверстия в массиве 9 ограничителей луча. Элементарные лучи, которые не были погашены, проходят через дефлектор 10 сканирования, который выполнен с возможностью развертывающего отклонения упомянутых элементарных лучей. На конце своих траекторий элементарные лучи, которые не были погашены, проходят через массив 11 фокусирующих линз, выполненный с возможностью фокусировки упомянутых элементарных лучей на поверхности мишени 12, например подложки. Мишень размещается на подвижном носителе 13 мишени, выполненном с возможностью перемещения мишени относительно оптической колонны 14 вдоль направления L длинного хода с использованием исполнительного механизма длинного хода. Носитель мишени дополнительно выполнен с возможностью перемещения мишени вдоль направления S короткого хода посредством исполнительного механизма короткого хода. Исполнительный механизм короткого хода может дополнительно включать в себя исполнительный механизм с шестью степенями свободы для тонкой настройки перемещения мишени в трех ортогональных направлениях, а также для тонкой настройки вращения мишени вдоль трех ортогональных осей. Как правило мишень 12 экспонируется полоска за полоской путем перемещения мишени под оптической колонной 14 с использованием исполнительного механизма длинного хода, экспонируя мишень 12 элементарными лучами, которые могут быть отклонены вдоль ширины полоски вдоль направления короткого хода дефлектором 10 сканирования. Когда вся полоска таким образом сформирована, исполнительный механизм короткого хода может использоваться для того, чтобы переместить мишень на расстояние, соответствующее ширине полоски в направлении S, после чего может быть обработана следующая полоска.
Когда структуры охватывают больше чем одну полоску, или когда полоска мишени должна быть обработана за несколько проходов, например, создавая структуру различных слоев полупроводникового устройства, важно, чтобы перекрывающиеся слои могли быть совмещены с заданной точностью. Такое совмещение может быть достигнуто путем точного позиционирования мишени 12 относительно оптической колонны 14.
Фиг. 2 показывает схематический вид сверху системы измерения положения предшествующего уровня техники для использования в системе литографии, в которой положение оптической колонны 14 измеряется относительно целевого носителя 13 мишени 12. Мишень 12 разделяется на полоски вдоль направления L длинного хода. Структурирование мишени 12 может начаться, когда точка p1 мишени помещается под оптической колонной 14 системы литографии. Вследствие сканирующего отклонения элементарных лучей любая часть полоски может быть достигнута элементарными лучами, когда мишень 12 перемещается под оптической колонной 14 исполнительным механизмом длинного хода системы литографии. Когда точка P2 мишени 12 находится под оптической колонной 14, исполнительный механизм короткого хода может использоваться для того, чтобы переместить мишень в направлении, перпендикулярном к направлению L длинного хода так, чтобы точка P3 мишени была помещена прямо под оптической колонной 14, и тогда может быть обработана следующая полоска. Носитель 13 мишени снабжен прямыми краями 15, 16 или зеркалами, причем край 15 перпендикулярен направлению L длинного хода, а край 16 перпендикулярен направлению S короткого хода. Края 15, 16 выполнены с возможностью отражения одного или более лучей 21a, 21b, 23a, 23b соответственно от интерферометров 20, 22 для того, чтобы отслеживать изменение в расстоянии между упомянутым интерферометром и краем 15 и 16 соответственно носителя 13 мишени. На основе любых изменений в этих расстояниях положение мишени 12 вычисляется относительно оптической колонны 15, то есть положение получается косвенно как функция изменения в расстоянии вдоль направления длинного хода или вдоль направления короткого хода. Любые изменения в упомянутом расстоянии будут приводить к изменению в расчетном положении, даже если изменения в расстоянии не будут вызваны исполнительным механизмом длинного хода или короткого хода системы. Например, когда край 15 деформируется, изменяя наклон края и/или изменяя фокус луча 21a интерферометра, падающего на край 15, расчетное положение мишени 12 относительно оптической колонны 14 будет изменяться. Кроме того, любые изменения в положении или ориентации интерферометра 20 будут влиять на расчетное положение.
Фиг. 3 схематично показывает позиционирующее устройство 500 в соответствии с настоящим изобретением для обнаружения совмещения и/или положения пятна 550 луча на подложке 513 в соответствии с настоящим изобретением. Подложка 513 включает в себя частично отражающую поверхность, имеющую по существу постоянный коэффициент отражения, и снабжена поглощающими луч структурами 571, которые изменяют коэффициент зеркального отражения подложки вдоль продольного направления L. Луч 511 света с предопределенной длиной волны проходит через расщепитель 536 луча и фокусируется фокусирующей линзой 512 в пятно на подложке 513, и частично отражается от нее. Интенсивность отраженного луча обнаруживается детектором 519 интенсивности луча. График 560 показывает зависимость обнаруженной интенсивности луча от положения пятна на подложке, когда подложка перемещается вдоль продольного направления L, или направления длинного хода. Позиционирующее устройство выполнено с возможностью выравнивания пятна луча на подложке. Это особенно полезно, когда несколько слоев шаблонов перекрывают друг друга во время отдельных сессий обработки одной и той же мишени. Как только мишень была совмещена, положение может быть отслежено с использованием других средств измерения положения, известных в данной области техники, таких как интерферометры.
Альтернативно позиционирующее устройство может использоваться для того, чтобы отслеживать положение луча на подложке во время обработки мишени, например во время подготовки и/или экспонирования мишени в системе литографии, на основе количества пиков в обнаруженном сигнале интенсивности. На основе количества пиков и фактической обнаруженной величины интенсивности положение может быть определено еще более точно.
Фиг. 4 схематично показывает позиционирующее устройство 500 в соответствии с настоящим изобретением более подробно. Позиционирующее устройство выполнено с возможностью обнаружения положения пятна 550 луча на подложке 513 в соответствии с настоящим изобретением. Источник 531 луча включает в себя лазер 534 для обеспечения луча 511 света с длиной волны в диапазоне от 600 до 650 нм или приблизительно 635 нм. Источник 531 луча дополнительно включает в себя оптоволокно 532 для направления луча 511 света от лазера 534 к оптической системе 533. Луч, покидающий оптоволокно 532, предпочтительно имеет почти совершенный гауссовский профиль и может легко коллимироваться. Источник луча включает в себя коллиматорную линзу 535, предназначенную для коллимирования луча 511 из оптоволокна 532. Однако, когда волокно не используется и лазер или другое устройство генерирования луча обеспечивает коллимированный луч, такая коллиматорная линза 535 может не потребоваться.
Оптическая система 533 дополнительно включает в себя расщепитель 536 луча для направления луча 511 к поверхности подложки 513. Фокусирующая линза 512 оптической системы фокусирует луч 511 на поверхности 513. Отраженный луч 518 генерируется зеркальным отражением луча 511 в подложке 513. Фокусирующая линза 512 может также использоваться для коллимирования отраженного луча 518. Отраженный луч 518 направляется к детектору 519 интенсивности луча расщепителем 536 луча.
Детектор 519 интенсивности луча включает в себя фотодиод. Альтернативно он может включать в себя несмещенный кремниевый PIN диод, работающий в фотоэлектрическом режиме. Этот режим может уменьшить количество образующегося тепла по сравнению со смещенным режимом работы фотодиода. Детектор интенсивности луча может также включать в себя операционный усилитель для преобразования тока из фотодиода в напряжение, которое может быть отфильтровано. Отфильтрованное напряжение может быть преобразовано в цифровой сигнал, который может использоваться процессором для определения положения или смещения поверхности 513 относительно оптической системы 533.
Активная область детектора 519 интенсивности луча больше, чем диаметр луча отраженного света, покидающего расщепитель луча, так что обнаруживается по существу вся энергия, покидающая расщепитель луча. Однако, другая фокусирующая линза (не показана), расположенная между расщепителем 536 луча и детектором 519 интенсивности луча может использоваться для того, чтобы фокусировать луч отраженного света на детекторе 519 интенсивности луча. Таким образом эффективная площадь детектора интенсивности луча может быть меньше, чем диаметр луча отраженного света, покидающего расщепитель 536 луча.
В неполяризующем расщепителе 536 луча может иметь место такой случай, что 50% луча 511 света направляются к подложке 513, в то время как другие 50% могут быть потеряны. Из отраженного светового луча также только 50% могут быть направлены к детектору 519 интенсивности луча, в то время как другие 50% могут быть потеряны. Это подразумевает, что 75% луча 511 света теряются, то есть не используются для обнаружения совмещения и/или положения.
Следовательно, поляризующий расщепитель 536' луча может использоваться в одном варианте осуществления устройства определения положения отметки в соответствии с настоящим изобретением. В этом случае источник 531 луча может обеспечивать поляризованный луч 511’ света. Источник луча может включать в себя поляризатор 538, выполненный с возможностью преобразования неполяризованного луча света в поляризованный луч 511 света. Луч 511 света может быть S-поляризованным лучом света, который обозначен на чертеже точкой.
Поляризующий расщепитель 536' луча может быть выполнен с возможностью направления S-поляризованного луча света на поверхность подложки. Оптическая система может дополнительно включать в себя четвертьволновую пластину 539, которая может быть расположена между расщепителем 536' луча и фокусирующей линзой 512. Когда луч 511’ света проходит через четвертьволновую пластину 539, его поляризация изменяется с S-поляризации на правую круговую поляризацию, как обозначено круговой стрелкой на чертеже. Когда луч 511’ отражается поверхностью 513, поляризация может снова измениться: луч отраженного света может иметь левую круговую поляризацию, как обозначено другой круговой стрелкой на чертеже. Когда луч 518 отраженного света проходит через четвертьволновую пластину 539, его поляризация изменяется с левой круговой поляризации на P-поляризацию, которая обозначена прямой стрелкой на чертеже. Поляризующий расщепитель 536' луча выполнен с возможностью направления P-поляризованного луча отраженного света на детектор 519 интенсивности света.
Использование поляризованного луча 511’ света, отраженного луча 518 света и поляризующего расщепителя 536' луча приводит к уменьшению рассеяния света, обратного отражения и потерь энергии в расщепителе 536' луча.
Фиг. 5 показывает часть системы литографии в соответствии с настоящим изобретением. Эта часть включает в себя подвижный носитель (или держатель) мишени. Как обсуждалось ранее, положение держателя определяется с использованием одного или более лучей 21a, 21b, 23a, 23b от интерферометров (не показаны). Такое положение определяется относительно проекционной оптики PO системы литографии. Однако, несмотря на то, что положение держателя 13 известно, точное положение мишени 12 (подложки или полупроводниковой пластины) относительно проекционной оптики PO тем не менее неизвестно. Специальные меры для фиксации могут быть предприняты таким образом, что положение и ориентация подложки 12 на держателе 13 были известны с ограниченной точностью, например ±20 мкм, упоминаемой в дальнейшем как грубое положение. Подложка 12 снабжается оптическими отметками положения SMRK, DMRK, которые имеют известное положение относительно координатной рамки полупроводниковой пластины. Точные положения, то есть координаты Xw, Yw оптических отметок положения полупроводниковой пластины относительно проекционной оптики PO определяются с использованием знания грубого положения оптических отметок положения SMRK, DMRK. Эти положения определяются с использованием двух чувствительных элементов оптического совмещения SS, DS в соответствии со способом по настоящему изобретению, как описано в формуле изобретения (однако, альтернативно это также может быть сделано путем использования единственного чувствительного элемента оптического совмещения). Каждый из чувствительных элементов оптического совмещения SS, DS имеет фиксированное и известное положение относительно проекционной оптики PO. В этом варианте осуществления каждый чувствительный элемент оптического совмещения SMRK, DMRK предназначен для измерения только в одном направлении (определяя таким образом положение относительно только одной оси). Это делается таким образом, что первый чувствительный элемент оптического совмещения SS, перемещенный в направлении оси X относительно проекционной оптики PO, измеряет вторую отметку положения DMRK в направлении, соответствующем оси X Xw. Второй чувствительный элемент оптического совмещения DS, перемещенный в направлении оси Y относительно проекционной оптики PO, измеряет первую отметку положения SMRK в направлении, соответствующем оси Y Yw. Следствием этого является то, что вращательная ошибка Rz держателя 13 вокруг оси Z становится до некоторой степени допустимой, а именно на ширину упомянутых оптических отметок положения SMRK, DMRK. Подложка (или полупроводниковая пластина) 12 как правило включает в себя множество дорожек LN, каждая из которых включает в себя множество кристаллов (не показаны). Все кристаллы отделяются друг от друга линиями разметки, то есть областями, которые резервируются для разделения кристаллов прорезями по линиям разметки. Оптические отметки совмещения являются предпочтительно местами на таких линиях разметки, чтобы избежать ненужной потери площади.
Следующие чертежи дополнительно поясняют способ определения положения подложки в соответствии с настоящим изобретением. Фиг. 6 показывает смоделированный профиль интенсивности, принадлежащий подложке, включающей в себя оптическую отметку положения в соответствии с настоящим изобретением. Фиг. 7 показывает измеренный профиль интенсивности, использующий систему литографии в соответствии с настоящим изобретением. Фиг. 8 показывает расчетную функцию перекрестной корреляции между профилями, изображенными на Фиг. 6 и Фиг. 7. Как уже обсуждалось, подложка 513 в соответствии с настоящим изобретением включает в себя оптические отметки положения SMRK, DMRK для того, чтобы они были считаны оптической записывающей головкой 500 для излучения света с предопределенной длиной волны, предпочтительно красного или инфракрасного света, более конкретно света с длиной волны 635 нм. Оптические отметки положения DMRK, SMRK имеют ширину отметки, длину отметки и предопределенное известное положение на подложке 513. Оптические отметки положения SMRK, DMRK простираются вдоль продольного направления X, Y и предназначены для изменения коэффициента отражения отметки положения вдоль упомянутого продольного направления. При построении графика зависимости интенсивности I света от продольного положения X получается профиль интенсивности, показанный на Фиг. 6. Профиль, изображенный на Фиг. 6, является смоделированным и основан на оптической отметке положения, которая будет обсуждаться позже в данном описании со ссылками на Фиг. 9, 15-17 и 20. То, что такой профиль смоделирован, не является существенным. Альтернативно он может быть измерен на тестовой подложке, включающей в себя такую оптическую отметку положения. Важным для настоящего изобретения является то, что по меньшей мере ожидаемый профиль интенсивности получается прежде, чем выполняется данный способ. После этого с применением грубого (неточного) положения чувствительный элемент оптического совмещения используется для того, чтобы сканировать оптическую отметку положения и измерить профиль интенсивности. Путь развертки при сканировании преднамеренно выбирается более длинным, чем длина отметки, например любая неточность в грубом положении принимается во внимание для создания по меньшей мере уверенности в том, что путь развертки полностью покрывает оптическую отметку положения. Фиг. 7 показывает измеренный профиль интенсивности. При сравнении профилей, изображенных на Фиг. 6 и Фиг. 7, можно заметить пару различий. Во-первых, центр между областями, имеющими периодически изменяющийся коэффициент отражения, сдвинут. Именно этот сдвиг дает критерий для определения точного положения оптической отметки положения относительно проекционной оптики. Во-вторых, измеренный профиль интенсивности является несколько деформированной версией измеренного профиля интенсивности. В-третьих, масштабы обоих профилей сильно отличаются. Такая деформация и различие в масштабах вызвали бы для предшествующего уровня техники трудности с определением положения по результатам измерений. Однако настоящее изобретение удобно обходит такие проблемы путем использования очень простой отметки положения, объединенной со способом перекрестной корреляции для определения сдвига между измеренным профилем интенсивности и ожидаемым (смоделированным или измеренным) профилем интенсивности. Фиг. 8 показывает возможную кривую перекрестной корреляции, полученную путем перекрестной корреляции Фиг. 6 и Фиг. 7. Вычисление перекрестной корреляции как таковое хорошо известно специалистам в данной области техники. По этой теме имеются различные учебники. Фиг. 8 показывает коэффициент перекрестной корреляции CRC как функцию сдвига упомянутых профилей интенсивности. Этот чертеж ясно показывает, что если Фиг. 7 сдвигается на расстояние, приблизительно равное 0,15 мкм, то коэффициент перекрестной корреляции является самым высоким (в верхней области TPR), то есть в этом случае оба профиля интенсивности более всего напоминают друг друга. Это значение в 0,15 мкм является поправочным коэффициентом, который будет добавлен к ранее упомянутому грубому положению для того, чтобы получить точное положение подложки относительно проекционной оптики.
Можно заметить, что кроме ясно видимого пика на кривой имеется некоторый периодически изменяющийся компонент, наложенный на эту кривую. Такой изменяющийся компонент может вызвать ошибку, поскольку он может исказить измерение перекрестной корреляции тем, что пик будет немного сдвинут относительно реального сдвига измеренной кривой. Важное усовершенствование, которое приводит к еще более высокой точности определенного положения, заключается в том, что сначала производится интерполяция и фильтрация вокруг верхней области TPR этой кривой, так что этот изменяющийся компонент по меньшей мере существенно удаляется. После этого сдвиг может быть определен из кривой перекрестной корреляции.
Фиг. 9 схематично показывает подложку, включающую в себя оптическую отметку положения в соответствии с настоящим изобретением. Этот вариант осуществления включает в себя первую главную область 110, вторую главную область 120, граничащую с первой главной областью 110, и третью главную область 130, граничащую со второй главной областью 120. Эти области располагаются таким образом, что оптическая отметка положения простирается в продольном направлении X. На обоих концах оптическая отметка 140 положения снабжается концевыми областями 140. Вторая главная область 120 и концевые области 140 являются пустыми областями, то есть не содержат структур, обеспечивая тем самым высокий коэффициент отражения. Первая главная область 110 и третья главная область 130 включают в себя поглощающие структуры, обеспечивая тем самым коэффициент отражения ниже, чем коэффициент отражения пустых областей 120, 140. То, что оптическая отметка положения имеет пустую область в середине, не является существенным. Такая область только улучшает оптическую видимость отметки положения, так что она может быть быстро найдена во время экспериментов. Также несущественно, что концевые области 140 являются пустыми. Однако, такие пустые области оказывают положительное влияние на форму кривой коэффициента перекрестной корреляции, то есть пик станет более высоким, потому что оптическую отметку положения можно будет более легко отличить от ее окружения. В этом примере первая и третья области 110, 130 имеют длину 100 мкм, а вторая главная область 120 имеет длину 50 мкм. Концевые области 140 в этом примере имеют разные длины, а именно 100 мкм и 50 мкм. Однако то, что эти области имеют разные длины, не является существенным. Высота MH оптической отметки положения предпочтительно составляет менее 40 мкм, что является максимальным размером, который помещается в обычную линию разметки. Как правило, высота MH отметки в обсуждаемых в данном описании вариантах осуществления немного меньше 40 мкм. Причина выбора значения, близкого к максимальному размеру, заключается в том, чтобы получить максимальный допуск на точность положения в данном направлении, а именно, ±20 мкм. Полная длина ML отметки составляет 450 мкм.
В первой главной области 110 и второй главной области 130 имеется множество пар 105 областей. Каждая пара 105 областей включает в себя первую область (или подобласть) 101, имеющую первый коэффициент отражения (как правило, низкий коэффициент), и вторую область 102, имеющую второй коэффициент отражения (как правило, высокий коэффициент), отличающийся от первого коэффициента отражения. Первая область 101 имеет ширину W, которая равна ширине второй области 102. Следовательно, шаг каждой пары 105 областей вдвое больше упомянутой ширины W. В зависимости от выбранного шага P предопределенное количество пар областей помещается в главной области 110, 130. Как можно заметить на Фиг. 9, оптическая отметка положения по настоящему изобретению имеет весьма регулярную структуру, что является выгодным, как уже обсуждалось ранее в данном описании.
Фиг. 9 дополнительно показывает третий уровень сегментации в соответствии с настоящим изобретением, а именно, что (черные) области 101, имеющие низкий коэффициент, включают в себя субволновые структуры SWS, причем субволновой размер определяется относительно длины волны света, используемого в оптическом считывающем устройстве для сканирования упомянутых оптических отметок положения. В текущем примере субволновые структуры имеют субволновой шаг PSW величиной 200 нм (ширина структур составляет 100 нм, и интервал между структурами составляет 100 нм).В случае, если используется считывающая головка DVD, длина волны света как правило составляет 635 нм (красный свет). Для того, чтобы сохранить регулярность высокой, сегментация может быть вертикальной, горизонтальной или точечной (одновременно вертикальной и горизонтальной сегментацией), как проиллюстрировано на чертеже. Фиг. 20 показывает более подробный вид оптической отметки положения, изображенной на Фиг. 9, для трех различных сценариев, а именно: без субволновых структур 100-1, с сегментацией в продольном направлении 100-2, а также с сегментацией в поперечном направлении 100-3.
Фиг. 10 показывает другой вариант осуществления оптической отметки MRK1 положения в соответствии с настоящим изобретением вместе с измеренными профилями интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 1 мкм. В первой области 101 дополнительная сегментация отсутствует. Следовательно, ширина первых областей 101 составляет 500 нм, что является субволновым размером в случае, если видимый красный свет используется для считывания профиля интенсивности для оптической отметки положения. Во время эксплуатационного использования устройства литографии, такого как электронно-лучевое устройство, поверх подложки располагаются маскирующие слои. Такой маскирующий слой включает в себя по меньшей мере вещество, устойчивое к электронному лучу, но может включать в себя и больше слоев. Кроме того, пять различных полупроводниковых пластин WFR1, WFR2, WFR3, WFR4, WFR5, каждая из которых имеет различные многослойные маски, было протестировано для того, чтобы определить влияние этих слоев на способ определения положения по настоящему изобретению. В первой полупроводниковой пластине WFR1 подложка не имеет никаких маскирующих слоев. В полупроводниковых пластинах со второй по пятую подложка включает в себя многослойную маску, включающую слой резиста, устойчивый к электронному лучу, объединенный со слоем твердой маски (таким как слой углерода, полученный методом центрифугирования), имеющим толщину, которая увеличивается от второй полупроводниковой пластины WFR2 к пятой полупроводниковой пластине WFR5. Между слоем твердой маски и слоем резиста может присутствовать дополнительный слой, такой как слой антиотражающего покрытия и/или адгезионный слой. На Фиг. 10 видно, что вторая полупроводниковая пластина WFR2 и третья полупроводниковая пластина WFR3 имеют самый большой динамический диапазон значений интенсивности. На Фиг. 10 можно ясно увидеть главные области и концевые области оптической отметки положения, то есть интенсивность света является самой низкой для первой главной области 110 и третьей главной области 130, потому что эти области включают в себя структуры, которые по меньшей мере частично поглощают или рассеивают падающий свет.
Фиг. 11 показывает увеличенный вид профилей, изображенных на Фиг. 10, причем увеличенный вид ограничен заштрихованным прямоугольником, изображенным на Фиг. 10. Следует отметить, что в экспериментах размер пятна составлял приблизительно 1,5 мкм, что больше шага P. Увеличенный вид показывает профиль интенсивности света при перемещении от концевой области 140 к первой главной области 110. Первое наблюдение состоит в том, что интенсивность света понижается от высокого значения (максимальное отражение в концевой области) до низкого значения, с наложенным на нее изменением. Это изменение происходит благодаря перемещениям от структуры к пустому месту и наоборот. Период этих изменений составляет 1 мкм, потому что пятно (при сканировании поверхности в продольном направлении) покрывает от одной до двух структур попеременно. Кроме того, по мере того, как многослойная маска увеличивается (включая в себя углерод, нанесенный с помощью центрифуги), интенсивность света падает, и разность между главными областями и концевыми областями и средней областью становится меньше.
Фиг. 12 показывает другой вариант осуществления оптической отметки MRK2 положения в соответствии с настоящим изобретением вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 2 мкм. В первой области 101 дополнительная сегментация отсутствует. В первых областях 101 нет никакой дополнительной сегментации. В этом варианте осуществления наблюдается другое явление, а именно, что имеется минимум интенсивности света при каждом перемещении. Следовательно, период этого изменения составляет 1 мкм (половину шага P). Поразительное наблюдение заключается в том, что в отсутствие многослойной маски разность в интенсивности света между концевыми областями 140 и главными областями 110, 130 является довольно низкой.
Фиг. 13 показывает другой вариант осуществления оптической отметки MRK3 положения в соответствии с настоящим изобретением вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 3 мкм. В первой области 101 дополнительная сегментация отсутствует. В первых областях 101 нет никакой дополнительной сегментации. Имеется минимум в интенсивности света при каждом перемещении. Следовательно, период этого изменения составляет 1,5 мкм (половину шага P).
Фиг. 14 показывает другой вариант осуществления оптической отметки MRK4 положения в соответствии с настоящим изобретением вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 4 мкм. В первой области 101 дополнительная сегментация отсутствует. В первых областях 101 нет никакой дополнительной сегментации. Имеется минимум в интенсивности света при каждом перемещении. Следовательно, период этого изменения составляет 2 мкм (половину шага P).
Фиг. 15 показывает другой вариант осуществления оптической отметки MRK5 положения, включающей в себя субволновые особенности в соответствии с настоящим изобретением, вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 2 мкм. В первых областях 101 имеется продольная сегментация. В этом варианте осуществления может быть сделано поразительное наблюдение. Минимумы интенсивности света теперь наблюдаются в середине (сегментированных) особенностей вместо переходов. Более того, период этого изменения равен шагу P. Другое поразительное наблюдение заключается в том, что вышеописанное справедливо для всех проверенных многослойных масок. Иначе говоря, субволновые особенности обеспечивают дополнительное преимущество, а именно, что способ определения положения по настоящему изобретению (использующий оптические отметки положения) намного менее чувствителен к многослойной маске, которая используется сверху подложки. Шаг субволновых особенностей составляет 200 нм.
Фиг. 16 показывает другой вариант осуществления оптической отметки MRK6 положения, включающей в себя субволновые особенности в соответствии с настоящим изобретением, вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 2 мкм. В первых областях 101 имеется поперечная сегментация. Результаты для этой отметки MRK6 положения сопоставимы с результатами для пятой отметки MRK5 положения, показанной на Фиг. 15. Аналогичным образом, этот вариант осуществления имеет то же самое дополнительное преимущество, что и вариант осуществления, проиллюстрированный на Фиг. 15, а именно более низкую чувствительность к многослойной маске, которая используется сверху подложки. Шаг субволновых особенностей составляет 200 нм.
Фиг. 17 показывает другой вариант осуществления оптической отметки MRK7 положения, включающей в себя субволновые особенности в соответствии с настоящим изобретением, вместе с увеличенным видом измеренных профилей интенсивности такой отметки для различных многослойных масок. Шаг P в этом варианте осуществления составляет 2 мкм. В первых областях 101 имеется как продольная, так и поперечная сегментация. Результаты для этой отметки MRK7 положения немного хуже, чем результаты для пятой и шестой отметок положения MRK5, MRK6, проиллюстрированных на Фиг. 15 и Фиг. 16. Аналогичным образом этот вариант осуществления имеет то же самое дополнительное преимущество, что и варианты осуществления, проиллюстрированные на Фиг. 15 и Фиг. 16, а именно более низкую чувствительность к многослойной маске, которая используется сверху подложки. Наблюдение заключается в том, что форма кривой профиля интенсивности отличается от формы кривых профиля интенсивности, изображенных на Фиг. 15 и Фиг. 16. Без привязки к какой-либо теории предполагается, что это может быть объяснено тем фактом, что двойная сегментация на Фиг. 17 (и таким образом эффективное превращение субволновых структур в полюса) гарантирует, что свет в обоих направлениях поляризации поглощается структурами, в то время как на Фиг. 15 и Фиг. 16 поглощение происходит главным образом для одного из направлений поляризации. Шаг субволновых особенностей составляет 200 нм.
Общие выводы из экспериментов, проиллюстрированных на Фиг. 10-17, являются следующими:
a) Все оптические отметки положения являются наблюдаемыми.
b) Амплитуды уменьшения сигнала интенсивности для некоторых многослойных масок уменьшаются, и это кажется независимым от типа отметки положения.
c) Сегментированные оптические отметки положения, обеспечивающие субволновые особенности, обеспечивают более высокую воспроизводимость.
Фиг. 18 показывает результаты воспроизводимости оптических отметок положения, изображенных на Фиг. 10, 12, 13, 14, 15, 16 и 17, для каждого чувствительного элемента оптического совмещения в системе литографии. Воспроизводимость является важным производственным показателем в измерениях положения или выравнивания. Для каждой из пяти полупроводниковых пластин WFR1, WFR2, WFR3, WFR4, WFR5 (каждая из которых имеет ранее описанные различные многослойные маски) была измерена воспроизводимость. Воспроизводимость была измерена следующим образом. Для каждой полупроводниковой пластины положение оптических отметок положения измерялось в 5 различных местах на полупроводниковой пластине, и это измерение было повторено 30 раз, и оно было повторено как для первого чувствительного элемента SS оптического совмещения, так и для второго чувствительного элемента DS оптического совмещения. Столбцы на Фиг. 18 обозначают среднюю воспроизводимость по всем 5 местам (или полям). Отрезки погрешности показывают амплитуду между лучшей и худшей воспроизводимостями упомянутых 5 мест. Самым важным выводом из Фиг. 18 является то, что сегментированные отметки показывают систематически лучшую воспроизводимость.
Фиг. 19 показывает результаты точности оптических отметок положения, изображенных на Фиг. 10, 12, 13, 14, 15, 16 и 17, для каждого чувствительного элемента оптического совмещения в системе литографии. В этих экспериментах каждая оптическая отметка положения была выложена по три в ряд. В измерениях точности средняя отметка смещения относительно внешних отметок вычисляется как среднее по полупроводниковым пластинам и по полям. Фиг. 19 показывает среднее (абсолютное) смещение 5 полей. Результаты показаны для каждой полупроводниковой пластины и для каждого типа отметки. Кроме того, эти эксперименты были выполнены как для первого чувствительного элемента SS оптического совмещения, так и для второго чувствительного элемента DS оптического совмещения. Важным выводом из Фиг. 19 является то, что сегментированные отметки показывают систематически лучшую точность.
Настоящее изобретение относится в целом к способу определения положения подложки в системе литографии, к таким подложкам как таковым, а также к такой системе литографии как таковой. Настоящее изобретение может быть применено в различных прикладных областях, таких как:
- оптические отметки положения на подложках для совмещения подложки;
- оптические отметки положения на носителях подложки для совмещения носителей подложки;
- оптические отметки положения на держателях для совмещения держателей;
- оптические отметки положения на масках;
- оптические отметки положения на вспомогательных подложках, таких как подложки измерения луча в электронно-лучевых машинах.
Следует понимать, что вышеприведенное описание включено для того, чтобы проиллюстрировать работу предпочтительных вариантов осуществления, и не предназначается для ограничения области охвата настоящего изобретения. Из вышеприведенного обсуждения для специалиста в данной области техники будут очевидны много вариаций, которые все же охватываются духом и областью охвата настоящего изобретения.
В дополнение к этому следует понимать, что когда в вышеприведенном описании и в приложенной формуле изобретения используется фраза «множество раз», она охватывает два раза или более.
Реферат
Изобретение относится к области литографии и касается системы для определения положения подложки в системе литографии. Система содержит оптическую колонну, чувствительный элемент оптического совмещения и подложку, содержащую оптическую отметку положения. Чувствительный элемент выполнен с возможностью испускания луча света на подложку и измерения профиля интенсивности луча отраженного света нулевого порядка. Оптическая отметка содержит главную область, содержащую множество пар областей, причем пары областей равны друг другу. Каждая пара областей содержит первую и вторую области, имеющие различные коэффициенты отражения. Ширина первой и второй областей и размер пятна света находятся в диапазоне от 1 мкм до 2 мкм, Первая область содержит структуры, субволновые по сравнению с длиной волны испущенного луча света. Субволновые структуры содержат множество регулярных сегментов, сформированных с помощью сегментации первой области вдоль первого направления и/или второго направления, причем второе направление перпендикулярно первому направлению. Технический результат заключается в повышении точности определения положения подложки. 2 н. и 16 з.п. ф-лы, 20 ил.
Комментарии