Способ, устройство и система для обработки, сортировки и вакцинации живых птиц - RU2723592C2
Код документа: RU2723592C2
Чертежи











Описание
Настоящее изобретение относится к устройствам, системам и способам обработки, сортировки и вакцинации живых птиц, таких как домашняя птица, в частности, для обработки, сортировки и вакцинации живых птиц путем удержания птиц за лопаточно-плечевой сустав.
Большинство систем предшествующего уровня техники, которые созданы для подвешивания и снятия животных, предназначены для мертвых животных, и таким образом, не учитывают гуманное обращение с животными. Однако, при обращении с живыми животными, такими как живая домашняя птица, необходимо принимать во внимание другие требования. Сортировка селекционеров (домашняя птица) имеет первостепенное значение для достижения однородной массы между группами и обеспечения лучшей производительности в период кладки. Современные системы оценки являются ручными, требуют интенсивной рабочей силы и/или не подходят для живой птицы, поскольку они не предназначены для приема живой птицы. То есть устройства предшествующего уровня техники могут повредить домашнюю птицу или увеличить уровень ее стресса до нездорового состояния.
Таким образом, существует необходимость в автоматизированном устройстве для подвешивания и снятия птиц, таких как домашняя птица, которое позволяет повысить пропускную способность процесса, обеспечивая при этом гуманное обращение с птицами.
Целью настоящего изобретения является создание способа, системы и устройства для обработки и сортировки птиц, которые преодолевают одну или несколько проблем предшествующего уровня техники. С этой целью интенсивно изучались и учитывались анатомия, движения и реакции птиц, пересматривая основные постулаты тригонометрии и физики. С помощью этого вклада было разработано техническое решение для управления транспортировкой, обработкой, сортировкой и вакцинацией живых птиц, таких как домашняя птица, обеспечивающее гуманное обращение с ними. Эта цель достигается с помощью признаков независимых пунктов формулы изобретения. Зависимые пункты формулы изобретения относятся к дополнительным аспектам изобретения.
Настоящее изобретение основано на общей идее подвешивания живых птиц, таких как домашняя птица, за их лопаточно-плечевой сустав для дальнейшей обработки птицы эффективным и аккуратным способом.
Согласно первому аспекту настоящего изобретения предусмотрено устройство для обработки и сортировки живых птиц, при этом устройство содержит основной элемент; принимающий элемент, прикрепленный с возможностью поворота к основному элементу и выполненный с возможностью приема и удерживания птиц за их лопаточно-плечевой сустав в первом положении и высвобождения птиц во втором положении принимающего элемента; и запирающий элемент, прикрепленный с возможностью перемещения к основному элементу и выполненный с возможностью блокировки принимающего элемента в первом положении и разблокировки принимающего элемента, чтобы поворачивать принимающий элемент из его первого положения во второе положение для освобождения птиц.
Принимающий элемент может предусматривать по меньшей мере два по существу V-образных элемента на первом конце принимающего элемента. V-образные элементы предпочтительно выполнены с возможностью удерживания живой птицы за ее лопаточно-плечевой сустав, так чтобы крылья живой птицы располагались по сторонам V-образных элементов. Конструкция V-образных элементов позволяет фиксировать живую птицу в принимающем элементе, когда она находится в удобном положении, тем самым обеспечивая гуманное обращение с птицей, пока ее удерживает принимающий элемент. Предпочтительно, каждый V-образный элемент содержит торцевую часть на его свободном конце, не прикрепленном к принимающему элементу, которая отогнута от принимающего элемента (и живой птицы), чтобы предотвратить травмы живой птицы. Две торцевые части могут содержать закругленные концы, чтобы дополнительно повысить безопасность птицы. Предпочтительно по меньшей мере один из V-образных элементов прикреплен к принимающему элементу с возможностью поворота, чтобы увеличить пространство между V-образными элементами, чтобы обеспечить прием птиц разных размеров. Другими словами, V-образные элементы могут быть выполнены с возможностью обеспечить прием птиц разных размеров, регулируя их открытое пространство, предпочтительно путем поворота в противоположном направлении на конце, который прикреплен к принимающему элементу. Несмотря на то, что достаточно было бы повернуть один из V-образных элементов в первом направлении от другого V-образного элемента, предпочтительно, чтобы оба V-образных элемента поворачивались в противоположных направлениях, чтобы принимать птиц разных размеров. Принимающий элемент может быть выполнен с возможностью поворота вокруг первой оси и по меньшей мере один V-образный элемент выполнен с возможностью поворота вокруг второй оси, которая отличается от первой оси, например, перпендикулярна первой оси, чтобы открыть и закрыть пространство, в которое попадает птица. То есть принимающий элемент имеет первую ось вращения, чтобы освободить птицу, тогда как вторая ось вращения для поворота V-образного элемента (элементов) перпендикулярна первой оси вращения. Другими словами, из-за анатомии птицы ее принимает по меньшей мере два V-образных элемента, каждый из которых имеет ось вращения, открываемых на ширину птицы, из которых птица затем освобождается путем поворота принимающего элемента вокруг оси, перпендикулярной оси вращения по меньшей мере двух V-образных элементов, таким образом, освобождая птицу мягким способом и на ноги. На практике было показано, что после освобождения птицы начинают взмахивать крыльями и плавно приземляются на землю.
Принимающий элемент может дополнительно содержать по меньшей мере один ограничивающий элемент, чтобы ограничить поворот и, таким образом, открытие и закрытие по меньшей мере одного V-образного элемента в заданном диапазоне. То есть, чтобы ограничить возможный поворот V-образного элемента (элементов), может быть предусмотрен ограничивающий элемент (элементы). Ограничивающий элемент (элементы) может быть предоставлен для ограничения поворота до максимума и/или до минимума, то есть до максимального отверстия для приема больших птиц и/или до минимального отверстия для приема мелких птиц соответственно. Таким образом, поворот V-образного элемента (элементов) может быть ограничен определенным заданным диапазоном для предотвращения неконтролируемого поворота V-образного элемента (элементов).
Принимающий элемент дополнительно содержит противовес во второй части, например, на втором конце принимающего элемента, который выполнен с возможностью поворота приемного элемента из второго положения в первое положение после освобождения птицы. То есть принимающий элемент может содержать заданную массу, предпочтительно на одном его конце, чтобы обеспечить автоматический поворот принимающего элемента обратно в первое положение после освобождения птицы, тогда принимающий элемент затем может принимать новую птицу. Предпочтительно, противовес имеет массу, легче, чем масса птицы, обрабатываемой настоящим изобретением, чтобы обеспечить поворот из первого положения во второе положение из-за массы птицы после того, как принимающий элемент разблокирован, то есть масса противовеса зависит от массы обрабатываемой птицы и поэтому может быть выбрана в соответствии с индивидуальными потребностями.
Основной элемент может представлять собой крюкообразный элемент, выполненный с возможностью прикрепления устройства к внешней системе, предпочтительно к системе автоматической обработки и сортировки. Крюкообразный элемент может быть выполнен в форме крюка или форме замкнутого контура для легкого прикрепления к внешней системе. Однако возможны другие формы и конфигурации крюкообразного элемента, и они в основном зависят от средств крепления внешних систем. Например, крюкообразный элемент может быть удлиненным элементом, который должен быть принят внешней системой, используя поглощающий элемент, окружающий и фиксирующий удлиненный элемент. Возможны и другие конфигурации креплений, известные в данной области техники.
Устройство может дополнительно содержать заднюю опору, выполненную с возможностью поддержки птицы в задней части птицы. Задняя опора может обезопасить птицу на устройстве и может уменьшить риск выскальзывания птицы из устройства. Это может быть особенно полезно для безопасного удержания также более мелких птиц.
Задняя опора может содержать или может состоять из пластиковой пластины. Пластиковая пластина может примыкать к по меньшей мере двум V-образным элементам. Пластиковая пластина может быть прикреплена к основному элементу и/или к по меньшей мере двум V-образным элементам, чтобы позволить принимающему элементу поворачиваться между первым и вторым положениями.
Согласно другому аспекту настоящего изобретения система для обработки и сортировки птиц, таких как домашняя птица, используется предпочтительно для сортировки птиц согласно их массе. Система содержит по меньшей мере один фиксирующий элемент, выполненный с возможностью прикрепления по меньшей мере одного устройства для обработки и сортировки живых птиц согласно настоящему изобретению согласно настоящему описанию. Предпочтительно, множество, например, двенадцать или более таких устройств, прикреплено к системе посредством соответствующих фиксирующих элементов. Система обеспечивает несущую систему, включающую в себя средства привода и путь, предпочтительно замкнутый контур, вдоль которого может перемещаться по меньшей мере один фиксирующий элемент. Система дополнительно содержит элемент взвешивания выполненный с возможностью взвешивания по меньшей мере одного устройства с птицей и по меньшей мере два, предпочтительно три, освобождающих элемента, выполненных с возможностью автоматической разблокировки запирающего элемента согласно массе соответствующей птицы и, таким образом, высвобождения принимающего элемента для поворота из первого положения во второе положение, чтобы выпустить птицу. Фиксирующий элемент образует крепежное средство системы и является аналогом описанного выше крюкообразного элемента устройства для обработки и сортировки живых птиц. Предпочтительно, система содержит освобождающие элементы в разных положениях, предпочтительно в трех положениях, пути, по которому фиксирующие элементы перемещаются в системе, чтобы освобождать птиц согласно их измеренной массе в заданном одном из указанных, предпочтительно трех, положений, чтобы автоматически сортировать птиц согласно их массе.
Система может дополнительно предусматривать по меньшей мере один элемент вакцинации или станцию вакцинации, выполненную с возможностью вакцинации птиц, пока их удерживает принимающий элемент, до освобождения птиц. Предпочтительно, элемент вакцинации выполнен с возможностью вакцинации только птиц определенной массы, то есть после взвешивания элементом взвешивания. Также может быть полезно предоставить более одного элемента вакцинации для вакцинации более, чем одной птицы за один раз или для обеспечения индивидуальной вакцинации птиц в соответствии с их массой.
Система может дополнительно предусматривать по меньшей мере один счетный элемент для подсчета птиц, предпочтительно согласно их определенной массе. Счетный элемент может быть представлен как отдельный блок или интегрирован в элемент взвешивания. Счетным элементом может быть, например, световой барьер, установленный в одной из областей, где птицы освобождаются в соответствии с их массой, таким образом, имея возможность определять, что каждая птица освобождается в конкретной области, то есть в одном из трех положений пути, по которому фиксирующие элементы перемещаются в системе.
Система может дополнительно предусматривать по меньшей мере одно устройство обработки, связанное с элементом взвешивания. По меньшей мере, одно устройство обработки может быть выполнено с возможностью определения массы птицы на основе выходного сигнала элемента взвешивания и массы тары устройства. По меньшей мере, одно устройство обработки может быть выполнено с возможностью автоматического определения массы тары в процедуре калибровки или тарирования системы. В качестве альтернативы или дополнительно по меньшей мере одно устройство обработки может быть выполнено с возможностью создания статистической информации, такой как среднее значение, дисперсия или статистический шаблон распределения, распределение массы множества птиц. Статистическая информация может выводиться оператору и/или может позволять системе автоматически устанавливать одну или несколько ограничительных масс для сортировки.
Согласно другому аспекту настоящего изобретения предложен способ обработки и сортировки птиц, такой как домашняя птица. Способ предусматривает следующие этапы: принимать и удерживать птицу за ее лопаточно-плечевой сустав в первом положении принимающим элементом; поворачивать принимающий элемент вокруг первой оси из первого положения во второе положение, таким образом, отпуская птицу, и поворачивать принимающий элемент вокруг первой оси из второго положения обратно в первое положение.
Способ может дополнительно предусматривать блокировку принимающего элемента в первом положении запирающим элементом. Запирающий элемент может быть выполнен согласно настоящему описанию.
Предпочтительно, прием и удержание птицы включает в себя поворот по меньшей мере одного из двух V-образных элементов вокруг второй оси, которая отличается от первой оси, например, перпендикулярна первой оси, чтобы открыть зазор и/или увеличить пространство между двумя V-образными элементами, чтобы приспособить его к размеру птиц, которые будут обрабатываться.
Поворот по меньшей мере одного из V-образных элементов может предусматривать поворот по меньшей мере одного из V-образных элементов в заданном диапазоне, используя по меньшей мере один ограничивающий элемент. Ограничивающий элемент может быть выполнен согласно настоящему описанию.
Поворот принимающего элемента вокруг первой оси из второго положения в первое положение предпочтительно включает в себя автоматический поворот принимающего элемента вокруг первой оси из второго положения в первое положение с использованием противовеса, прикрепленного ко второму концу принимающего элемента. Противовес может быть выполнен согласно настоящему описанию. Способ может дополнительно предусматривать этап присоединения принимающего элемента и запирающего элемента к внешней системе, предпочтительно к системе автоматической обработки и сортировки согласно настоящему описанию.
Принимающий элемент и запирающий элемент могут быть прикреплены к внешней системе, например, с помощью соединения с защелкой.
Предпочтительно, способ дополнительно предусматривает по меньшей мере один из следующих этапов: этап автоматического определения массы птицы, этап автоматической сортировки птицы, соответственно определенной массе птицы, этап автоматического подсчета птиц, предпочтительно соответственно определенной массе птицы, и этап автоматической вакцинации птицы, удерживаемой принимающим элементом. Этап автоматического подсчета птиц может выполняться с помощью счетного элемента или взвешивающего элемента, то есть подсчет может выполняться взвешивающим элементом или отдельным счетным элементом.
Способ может дополнительно предусматривать этап обработки определяемой массы птицы для получения статистической информации о распределении массы множества птиц. Для иллюстрации можно определить одну или несколько характеристик статистического распределения. Характеристики могут включать среднее значение, дисперсию, среднюю ширину или распределение, указывающее долю выборочной группы птиц, соответственно попадающих в каждый из нескольких интервалов массы. Способ может дополнительно предусматривать настройку по меньшей мере одного разделительного массы для сортировки птиц на основе пользовательского ввода и/или полученной статистической информации о распределении массы. Некоторые предпочтительные варианты осуществления теперь описаны со ссылкой на чертежи. В целях объяснения излагаются различные конкретные детали, не выходящие за рамки настоящего изобретения, как заявлено.
На ФИГ.1 представлен вид в перспективе варианта осуществления настоящего изобретения.
На ФИГ.2a представлен вид спереди варианта осуществления Фиг.1.
На ФИГ.2b представлен вид сбоку варианта осуществления Фиг.1.
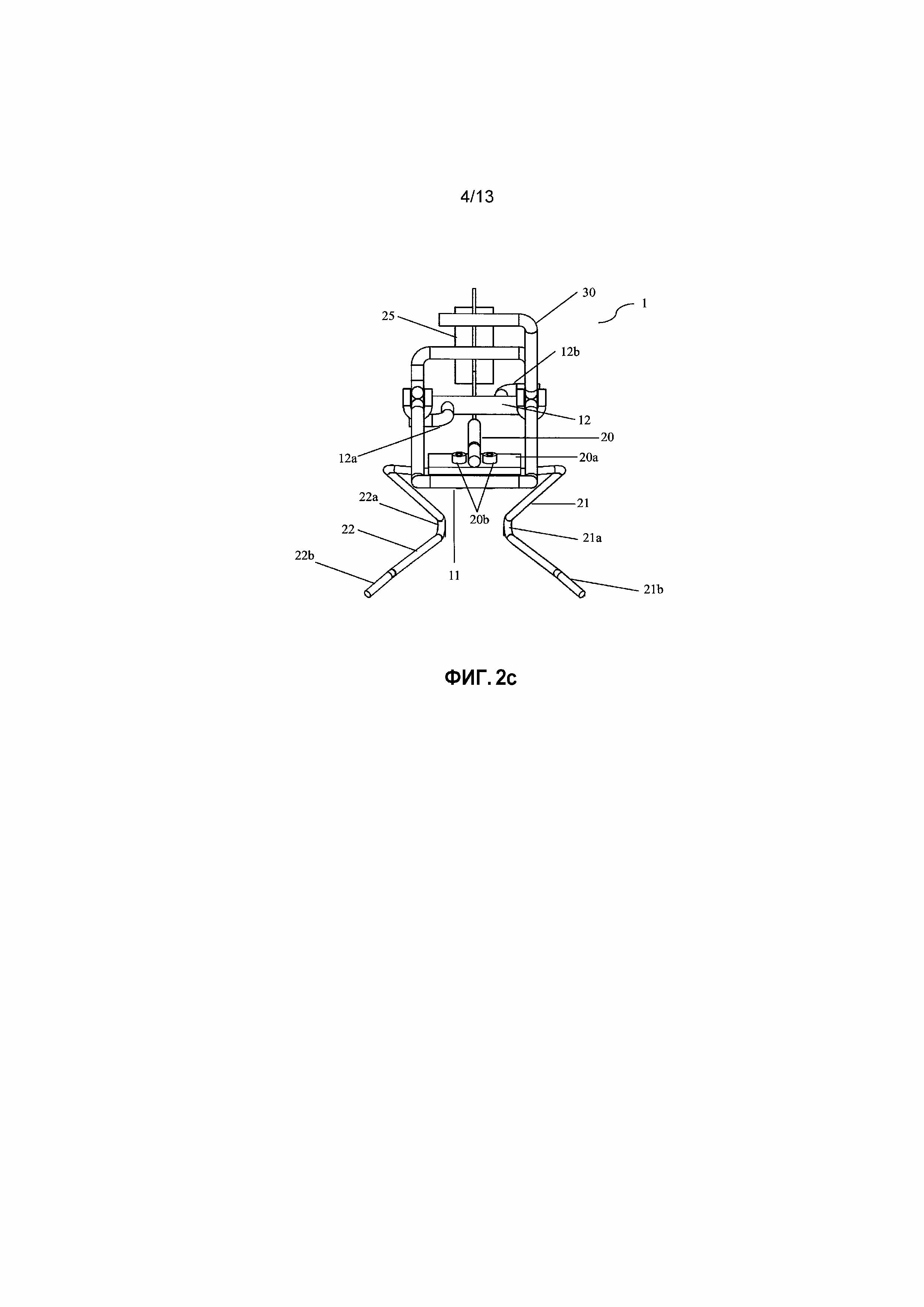
На ФИГ.2c представлен вид сверху варианта осуществления Фиг.1.
На ФИГ.3 представлен вид в разобранном виде варианта осуществления Фиг.1.
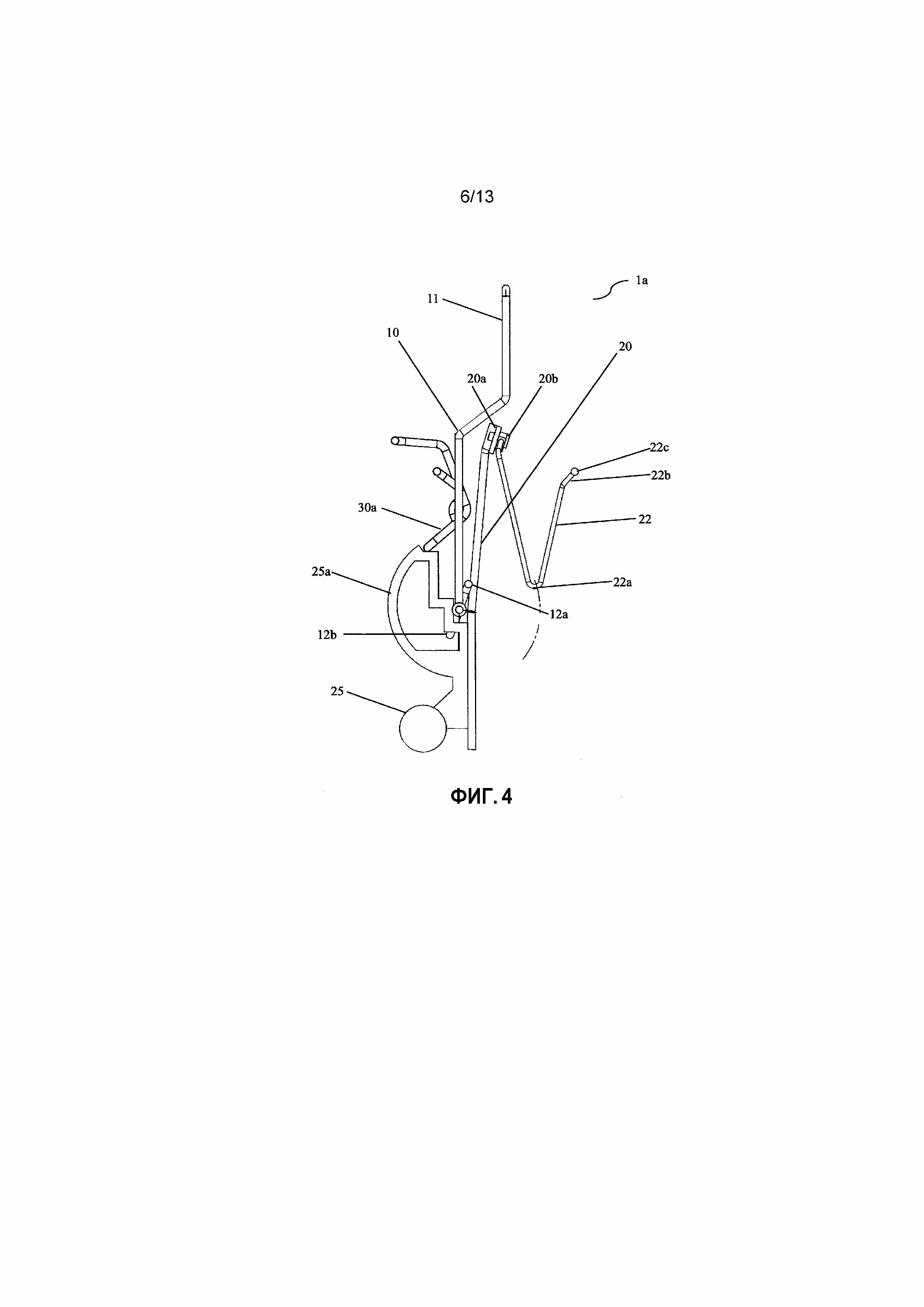
На Фиг.4 представлен вид сбоку другого варианта осуществления настоящего изобретения.
На Фиг.4a представлен вид спереди варианта осуществления Фиг.4.
На Фиг.5 представлен вид сверху системы согласно варианту осуществления настоящего изобретения.
На Фиг.6 представлен вид сбоку системы варианта осуществления Фиг.5.
На Фиг.7 представлен еще один вариант осуществления системы согласно Фиг.5 и Фиг.6.
На Фиг.8 представлен вид спереди варианта осуществления настоящего изобретения.
На Фиг.9 представлен вид сверху системы в соответствии с вариантом осуществления настоящего изобретения.
На Фиг.10 представлен вид системы в перспективе согласно варианту осуществления настоящего изобретения.
На Фиг.1, 2а-2с и 3 представлено устройство согласно настоящему изобретению в соответствии с одним иллюстративным вариантом осуществления, где на Фиг.1 представлен вид в перспективе, на Фиг.2а представлен-вид спереди, на Фиг.2b представлен-вид сбоку, на Фиг.2с представлен-вид сверху, а на Фиг.3 представлен вид в разобранном виде. Следующее описание сделано со ссылкой на Фиг.1, 2a-2c и 3. В частности, на Фиг.1, 2а-2с и 3 представлено устройство 1 для подвешивания и сортировки живых птиц, таких как домашняя птица, с основным элементом 10, содержащим крюкообразный элемент 11. В этом варианте осуществления крюкообразный элемент 11 и основной элемент 10 выполнены в виде единого элемента, но крюкообразный элемент 11 также может быть прикреплен к основному элементу 10. На Фиг.1, 2а-2с и 3 дополнительно представлен принимающий элемент 20, который соединен с возможностью поворота с основным элементом 10 горизонтальной частью 12, по существу перпендикулярно прикрепленной к принимающему элементу 20. Соответствующая первая ось А вращения принимающего элемента 20 показана по пунктирной линии. Кроме того, на фигурах показан фиксирующий элемент 30 и противовес 25, в котором противовес 25 может быть прикреплен к принимающему элементу 20, а фиксирующий элемент 30 может быть прикреплен к основному элементу 10. Кроме того, два выступа 12а и 12b соединены с принимающим элементом 20, предпочтительно с горизонтальной частью 12 принимающего элемента 20, чтобы ограничить поворот принимающего элемента 20.
Как показано на Фиг.1, 2a-2c и 3, принимающий элемент 20 дополнительно содержит два по существу V-образных элемента 21, 22, которые изогнуты на этих открытых торцевых частях 21b, 22b таким образом, что торцевые части направлены от устройства, предпочтительно изгибаясь от любых частей тела живой птицы, находящейся в нем. По существу V-образные элементы 21, 22 соединены с возможностью поворота с принимающим элементом 20, чтобы открывать и закрывать угол между двумя V-образными элементами 21, 22, чтобы позволить принимать птиц разного размера. Соответствующая ось В вращения обозначена на Фиг.2b. В точке соединения V-образных элементов 21, 22 принимающий элемент 20 может предусматривать элемент, подобный элементу 20а, и два фиксирующих элемента 20b, определяющих прикрепленную к нему ось вращения, которые выполнены с возможностью поворота пары V-образных элементов 21, 22 к пластине, подобной элементу 20а, и, таким образом, к принимающему элементу 20. В этом варианте осуществления ось вращения двух V-образных элементов 21, 22 смещена на определенное расстояние, но может также быть конгруэнтной для образования одной оси.
V-образные элементы 21, 22 изображены в виде двух элементов, однако специалисту очевидно, что V-образные элементы могут быть сконструированы в виде множества элементов. Например, каждый из V-образных элементов 21, 22 может предусматривать два по существу параллельных V-образных элемента в непосредственной близости, чтобы обеспечить лучшую фиксацию птиц. Другими словами, структура каждого из V-образных элементов 21, 22 может предусматривать двойную структуру.
В частности, V-образные элементы 21, 22 могут каждый содержать по две удлиненные части, которые простираются вбок от устройства 1 от концов, соединенных с пластиной подобно элементу 20а (например, Фиг.2а). Удлиненные части могут быть согнуты приблизительно на 90° для перехода на первые стойки, вытянутые к нижней части устройства 1. Согнутые части 21а, 22а на конце первых стоек предусмотрены для приема птицы в ее лопаточно-плечевом суставе. Для того, чтобы обеспечить надежное удержание птицы и в то же время обеспечить легкое освобождение птицы, согнутые участки 21а, 22а изогнуты между приблизительно 100-170°, предпочтительно между приблизительно 120-150° и более предпочтительно между приблизительно 130°-140° (Фиг.2b). V-образные элементы 21, 22 дополнительно проходят от согнутых участков 21а, 22а к открытым торцевым частям 21b, 22b. Часть между согнутыми участками 21а, 22а и открытыми торцевыми частями 21b, 22b может быть по существу прямой и обозначаться как вторые стойки. Пластина, подобная элементу 20а, дополнительно содержит два ограничительных элемента 23, 24 для каждого V-образного элемента 21, 22. Ограничительные элементы 23, 24 прикреплены к принимающему элементу 20 так, что поворот V-образных элементов 21, 22 является ограниченным в заданном диапазоне, чтобы предотвратить неконтролируемое вращение или колебание V-образных элементов 21, 22. Ограничительные элементы 23, 24 могут представлять собой выступы, проходящие от пластины, такой как элемент 20а, близко к точке соединения (фиксирующие элементы 20b) пластины, как элемент 20а, и V-образные элементы 21, 22. Как лучше всего видно из Фиг.2а, V-образные элементы 21, 22 ограничены в своем поворотном движении ограничительными элементами 23, 24.
В основном положении согнутые участки 21а, 22а направлены друг к другу под заданным углом, установленным нижними ограничительными элементами 24. Из-за вращения V-образных элементов 21, 22 в противоположных направлениях согнутые участки 21а, 22а отвернуты друг от друга так далеко, насколько позволяют верхние ограничительные элементы 23. Фиг.2а дополнительно иллюстрирует предпочтительное направление открытых торцевых частей 21b, 22b. В частности, открытые торцевые части 21b, 22b направлены от устройства 1 и, следовательно, от любых частей тела птицы.
Конфигурация V-образных элементов 21, 22 в базовом положении также может быть видна на Фиг.2с. Расстояние между первой стойкой одного V-образного элемента 21 до первой стойки другого V-образного элемента 22 уменьшается по направлению к согнутым участкам 21a, 22a. Расстояние между второй стойкой одного V-образного элемента 21 и второй стойкой другого V-образного элемента 22 также уменьшается по направлению к согнутым участкам 21a, 22a. Однако при вращении V-образных элементов 21, 22 стойки могут стать параллельными друг другу, или расстояние между ними может даже увеличиваться по направлению к согнутым участкам 21а, 22а. Запирающий элемент 30 подвижно прикреплен к основному элементу 10 и фиксирует принимающий элемент 20 в первом положении (исходном положении), в котором принимающий элемент 20 способен принимать птиц, которые висят их лопаточно-плечевым суставом на изгибах 21а, 22а V-образных элементов. В этой конфигурации вторые стойки V-образных элементов 21, 22 направлены вверх, таким образом, удерживая птицу. Запирающий элемент 30 в этом варианте осуществления подвижен в направлении вверх, тем самым отпирая или освобождая принимающий элемент 20. После освобождения принимающего элемента 20 путем перемещения запирающего элемента 30 в направлении вверх, принимающий элемент 20 поворачивается во второе положение (освобождающее положение) из-за массы птицы, поскольку масса птицы > массы противовеса 25. Вторые секции V-образных элементов 21, 22 направлены вниз во втором положении, таким образом, освобождая птицу. Максимальный поворот принимающего элемента задается выступами 12а и 12b. После освобождения птицы принимающий элемент 20 поворачивается назад в исходное положение из-за массы противовеса 25. Наконец, запирающий элемент 30 перемещается вниз, чтобы зафиксировать принимающий элемент 20 в его исходном положении. Движение запирающего элемента 30 отмечено стрелками на Фиг.2b.
Освобождение птицы из принимающего элемента 20 предпочтительно выполняет поворот принимающего элемента 20, так что V-образные элементы 21, 22 приближаются к земле. Таким образом, птица выпускается с высоты, ниже высоты, на которой птицу удерживают в первом положении (исходном вертикальном положении). Таким образом, птица может легко приземлиться на ноги, когда ее выпускают из принимающего элемента 20, двигаясь обычным образом и хлопая крыльями. Освобождение птицы из принимающего элемента 20, то есть из V-образных элементов 21, 22, поддерживается формой V-образных элементов 21, 22. То есть, достигая освобождающего положения, птица автоматически выскакивает из V-образных элементов 21, 22.
Предпочтительно, чтобы принимающий элемент 20 содержал выемку, в которую может зацепляться запирающий элемент 30, чтобы фиксировать принимающий элемент 20 в его исходном вертикальном положении.
Противовес 25 прикреплен к принимающему элементу 20, чтобы дать возможность принимающему элементу 20 повернуться обратно в исходное положение после того, как птица освобождена из принимающего элемента 20 (как описано выше). В частности, противовес 25 может быть выполнен с возможностью поворота принимающего элемента 20 из первого положения во второе положение, когда птица удерживается V-образными элементами 21, 22 и с возможностью поворота принимающего элемента 20 из второго положения в первое положение после того как птица отпущена. Это может быть достигнуто путем учета положения оси вращения, положения и массы противовеса 25 и ожидаемого диапазона массы птицы, которая должна быть принята устройством. Противовес 25 может быть прикреплен к принимающему элементу плоской частью 25а, которая содержит вышеупомянутую выемку, в которую может зацепляться запирающий элемент 30, чтобы фиксировать принимающий элемент 20 в его исходном вертикальном положении.
На Фиг.3 представлено устройство 1 в разобранном виде. В частности, пластина, подобная элементу 20а, содержит два отверстия, которые приводятся в соответствие с двумя отверстиями на конце удлиненных частей V-образных элементов 21, 22. Затем крепежные элементы вводят через отверстия для фиксации V-образных элементов 21, 22 к пластине, подобной элементу 20а.
На Фиг.4 и 4а показан альтернативный вариант осуществления устройства 1а согласно настоящему изобретению. Части этого альтернативного варианта осуществления, которые эквивалентны тем, которые уже описаны со ссылкой на Фиг.1, 2a-2c и 3, обозначены соответствующими номерами. Ниже описаны только те части, которые отличаются от частей, описанных со ссылкой на Фиг.1, 2a-2c и 3.
В частности, на Фиг.4 показан вид сбоку альтернативной конструкции запирающего элемента 30а и закругленных торцевых частей 21с, 22с (закругленная торцевая часть 21с не видна на Фиг.4, а только на Фиг.4а), которая показывает вид спереди согласно варианту из Фиг.4.
Запирающий элемент 30а прикреплен к основному элементу 10 с возможностью движения, однако движение запирающего элемента 30а согласно этому варианту осуществления представляет собой вращательное движение вокруг оси вращения. Ось C вращения (пунктирная линия на Фиг.4а) предпочтительно параллельна оси вращения принимающего элемента 20. Вращение запирающего элемента 30а в первом направлении позволяет вращать принимающий элемент 20, чтобы освободить птицу. После того, как принимающий элемент 20 поворачивается обратно в исходное положение благодаря противовесу 25, запирающий элемент 30а поворачивается назад, чтобы зафиксировать принимающий элемент в исходном положении.
Кроме того, V-образные элементы 21, 22 содержат закругленные торцевые части 21c, 22c. Закругленные торцевые части 21c, 22c по существу имеют форму шарика и расположены на свободных концах V-образных элементов 21, 22, которые не соединены с принимающим элементом 20. Закругленные торцевые части 21c, 22c уменьшают риск травмирования птиц во время приема, удержания и освобождения принимающим элементом 20. Альтернативы, представленные на Фиг.4 могут быть обе независимо включены в вариант осуществления, представленный на Фиг.1, 2a-2c и 3, то есть можно включить все признаки Фиг.4 в вышеупомянутый вариант осуществления или включить их отдельно. На Фиг.5 и 6 показана система 100 для обработки, сортировки и вакцинации птиц согласно варианту осуществления настоящего изобретения, в котором на Фиг.5 показан вид сверху и на Фиг.6 показан вид сбоку указанной системы 100.
На Фиг.5 показана несущая система 101, к которой прикреплено множество фиксирующих элементов 102-114, которые могут взаимодействовать с ранее описанными устройствами обработки и сортировки птиц. Несмотря на то, что показаны тринадцать фиксирующих элементов 102-114, для специалиста ясно из настоящего описания, что для настоящего изобретения может быть достаточно только одного фиксирующего элемента, то есть число фиксирующих элементов 102-114 дано исключительно с целью иллюстрации. Несущая система 101 позволяет автоматически перемещать фиксирующий элемент 102-114 по пути в одном направлении (обозначен пунктирной стрелкой), предпочтительно с помощью двигателя (не показан) для обеспечения замкнутого контура.
На Фиг.5 дополнительно показаны три заданных положения, то есть области 120, 121, 122, в которых птицы могут автоматически освобождаться (обозначаются стрелками) в зависимости от их массы. То есть система измеряет массу каждой птицы с помощью взвешивающего элемента (описанного ниже) и высвобождает птицу либо в области 120, 121, либо в области 122 в зависимости от ее определенной массы. Однако число заданных областей не ограничено тремя областями 120, 121, 122, их может быть по меньшей мере две области. Чтобы освободить птицу, то есть переместить запирающий элемент 30 согласно настоящему описанию, система 101 содержит освобождающий элемент (не показан) в двух положениях, в которых предполагается, что птица освобождается. Выпускающие элементы предпочтительно автоматически регулируются на основе измеренного массы и вызывают движение запирающего элемента 30.
Как видно схематично на Фиг.6, устройства 1, 1а принимаются фиксирующими элементами 102-114 (здесь в качестве образца показаны только 108-110). Кроме того, на Фиг.6 показан взвешивающий элемент 130, который выполнен с возможностью взвешивания птиц, принятых устройством 1, 1а. Взвешивающий элемент 130 может быть прикреплен к каждому фиксирующему элементу 102-114 (не показан), чтобы измерять массу соответствующей птицы или отдельные фиксирующие элементы могут быть прикреплены к несущей системе 101 в предопределенном положении, так что устройство 1, 1a, проходя это положение, взвешивается, чтобы измерить массу птицы, принятой указанным конкретным устройством.
Кроме того, система 100 предпочтительно содержит по меньшей мере одно устройство для автоматической инъекции (не показано) или станцию вакцинации (не показана) в одном или нескольких заданных положениях системы 100. Устройство для инъекции может быть выполнено с возможностью вакцинации птицы, пока она удерживается устройством 1, 1a. Вакцина предпочтительно вводится в грудную клетку птицы, которая раскрыта к передней части устройства 1, 1а, то есть грудная клетка птицы не блокируется никакими частями устройства 1, 1а. Такие же или дополнительные станции вакцинации могут быть предусмотрены для глаз, шеи и/или крыльев птиц, которые все свободно доступны, когда птицы приняты устройством 1, 1а.
На Фиг.7 показан дополнительный вариант осуществления системы согласно Фиг.5 и 6. Как показано на Фиг.7, система 100 может быть выполнена с возможностью поворота или наклона от горизонтального положения (как показано на Фиг.6) до более вертикального положения для экономии места во время хранения или транспортировки. Предпочтительно угол от горизонтального положения (пунктирная линия) может непрерывно изменяться до полностью вертикального положения (90° относительно пунктирной линии). Кроме того, предпочтительно, чтобы во время отклоняющего движения устройства 1, 1а, прикрепленные к фиксирующим элементам 102-114, поддерживались горизонтально, предпочтительно за счет их собственного массы. Это положение удобно в местах, где недостаточно пространства или для транспортировки системы 100. Предпочтительно для обеспечения автоматической регулировки степени наклона системы 100 используют пневматическую систему. Система 100 может поворачиваться на одну из сторон системы 100, как показано на Фиг.7 или вокруг центральной оси, предпочтительно в центре системы 100.
В любом из описанных выше вариантов осуществления может быть предусмотрена поддерживающая пластина, выполненная с возможностью поддержки птицы в задней области птицы, как будет объяснено более подробно со ссылкой на Фиг.8.
На Фиг.8 показано устройство 1b для подвешивания и сортировки живых птиц. Устройство 1b может иметь любое из описанных выше положений. Для наглядности устройство 1b содержит основной элемент 10, содержащий крюкообразный элемент 11, принимающий элемент 20, который может предусматривать по меньшей мере два V-образных элемента и запирающий элемент (не показан на Фиг.8). Устройство 1b может предусматривать заднюю опору 40. Задняя опора 40 может быть выполнена с возможностью поддерживания птицы в задней области птицы. Когда птица принимается принимающим элементом 20, задняя опора 40 может закрепить птицу, чтобы уменьшить риск выпадения птицы из устройства. Это может быть особенно полезным для безопасного удержания также более мелких птиц.
Задняя опора 40 может предусматривать или может состоять из пластиковой пластины. Пластиковая пластина может упираться в по меньшей мере два V-образных элемента 21а, 21b принимающего элемента. Пластиковая пластина может быть прикреплена к основному элементу 10 и/или по меньшей мере к двум V-образным элементам 21а, 21b, чтобы позволить принимающему элементу 20 поворачиваться между первым и вторым положениями. Пластмассовая пластина может быть прикреплена к основному элементу 10 и/или по меньшей мере к V-образным элементам 21а, 21b, чтобы обеспечить возможность поворота по меньшей мере одного из V-образных элементов 21а, 21b вокруг второй оси В, изображенной на Фиг.2b, для размещения птиц различных размеров. Устройство 1b может иметь любую одну или любую комбинацию других дополнительных функций согласно настоящему описанию. Элементы, которые соответствуют по своей конфигурации и/или операции, элементам, уже описанным выше, обозначены одинаковыми ссылочными знаками на Фиг.8.
На Фиг.9 показана система 100 согласно варианту осуществления. Система 100 может иметь конструкцию и работу, аналогичную системе 100, описанной со ссылкой на Фиг.5-7. Система 100 может предусматривать устройство обработки, включающее в себя по меньшей мере одну интегральную схему 131. Устройство обработки может быть выполнено с возможностью автоматической обработки выходного сигнала взвешивающего элемента 130 для определения массы птицы. Устройство обработки может определять массу птицы путем вычитания массы тары устройства 1, 1а, 1b из совокупного массы устройства 1, 1а, 1b и птицы, находящейся в нем. Устройство обработки может быть выполнено с возможностью автоматического определения массы тары устройства 1, 1a, 1b, например, в процессе калибровки или тарирования.
Устройство обработки может быть выполнено с возможностью выполнения дополнительных операций обработки и контроля на основе массы птицы. Устройство обработки может быть выполнено с возможностью создания статистической информации распределения массы множества птиц. Статистическая информация может храниться в памяти 133 и/или выводиться через пользовательский интерфейс 134. Статистическая информация может выводиться оператору и/или может позволять системе автоматически устанавливать один или несколько разделителей массы для сортировки. Статистическая информация может включать среднее значение, дисперсию, среднюю ширину или распределение, указывающее долю выборочной группы птиц, соответственно попадающих в каждый из нескольких интервалов массы. Для иллюстрации может быть вычислена и выведена через пользовательский интерфейс 134 диаграмма, показывающая долю птиц, попадающих в соответствующие интервалы массы.
Статистическая информация может использоваться для сортировки. Для иллюстрации один или несколько разделителей массы могут определять, в какой из этих по меньшей мере двух областей 120, 121, 122 птица освобождается. Массу птицы можно соответственно сравнивать с одним или несколькими разделителями массы для определения области 120, 121, 122, в которой птица должна быть освобождена. Устройство обработки системы 100 может быть выполнено с возможностью автоматической установки разделителя массы на основе статистической информации, полученной путем отбора из множества масс птиц.
Разделители массы можно устанавливать на основе статистической информации, чтобы гарантировать, что желаемые доли или желаемое количество птиц впоследствии будут выпущены в каждую из областей 120, 121 и 122 соответственно в зависимости от массы птицы. В качестве альтернативы или дополнительно разделители массы можно устанавливать с помощью пользовательского ввода, имеющегося на пользовательском интерфейсе 134. На основании разделителей массы и статистической информации о распределении массы устройство обработки может автоматически определять долю птиц, которые будут освобождены соответственно в каждой из по меньшей мере двух областей 120, 121 и 122, чтобы помочь оператору установить соответствующие разделители массы.
При работе системы 100 может быть выполнено тарирование для определения массы тары устройства 1, 1a, 1b без птицы. После этого может быть проведена процедура выборки, чтобы получить статистическую информацию о массе птиц из образцовой группы птиц. Информация о статистическом распределении массы птиц может быть выведена или, например, сохранена. Разделители массы могут быть вычислены различными способами. Для иллюстрации пользовательский интерфейс 134 может позволить оператору указывать долю животных, которые должны соответственно назначаться каждому из множественного числа типов, которые могут, например, соответствовать областям 120, 121 и 122 освобождения. Система 100 может автоматически вычислять разделители массы на основе статистического распределения, полученного во время выборки, и желаемых долей, заданных входным сигналом оператора. Альтернативно или дополнительно система 100 может позволить оператору указывать общее количество животных и количество животных, которые должны быть назначены соответственно каждому из множественного числа типов, которые могут, например, соответствовать областям 120, 121 и 122 освобождения птицы. Система 100 может автоматически вычислять разделители массы на основе статистического распределения, полученного во время выборки, и номеров, заданных оператором через пользовательский интерфейс 134.
После этого можно проводить автоматическое взвешивание и сортировку птиц с использованием разделителей массы. Система 100 может выполнять дополнительные операции. Для иллюстрации система 100 может предусматривать элемент вакцинации, как объяснялось выше.
На Фиг.10 показан схематичный вид системы 100 в перспективе согласно варианту осуществления. Система 100, схематично изображенная на Фиг.9, выполнена как передвижная система. Система 100 содержит раму 141, выполненную с возможностью легкого перемещения системы 100. Рама 141 может включать в себя ролики, колеса 142 или другие элементы, которые облегчают перемещение системы 100.
Пользовательский интерфейс 134 системы 100 может иметь любую из множества конфигураций. Для иллюстрации пользовательский интерфейс 134 может включать в себя защитный элемент 135, который может простираться вокруг по меньшей мере части окружности системы 100. Защитный элемент 135 может быть выполнен в виде защитного провода. Защитный элемент 135 может проходить примерно по всей окружности системы 100. Приведение в действие защитного элемента 135, например, путем натяжения, может привести к приостановке работы системы 100. Пользовательский интерфейс 134 может дополнительно или альтернативно содержать интерфейсные элементы, такие как сенсорный экран 136, защитный выключатель или педальный переключатель. Для иллюстрации педальный переключатель можно использовать для управления процедурой вакцинации и/или скоростью транспортировки птиц в системе 100. Система 100 может включать в себя конвейер (не показан), выполненный с возможностью зацепления с устройством 1, 1a, 1b согласно варианту осуществления. Конвейер может представлять собой бесконечный конвейер, служащий для транспортировки устройства 1, 1а, 1b по окружности вокруг системы 100.
Описанные здесь устройства, системы и способы могут быть использованы для сортировки множества птиц на две, три или более трех подгрупп с различным средним массой. Это позволяет управлять каждой группой таким образом, чтобы обеспечить постоянную однородность массы птиц внутри подгруппы. Описанные здесь устройства, системы и способы могут быть выполнены с возможностью облегчения сортировки птиц по массе тела, например, для повышения однородности стаи путем сортировки множества птиц на две, три или более трех подгрупп. Непостоянство в скорости полового созревания, которое может быть вызвано неоднородной массой тела в стае птиц, может быть, например, основным ограничением для достижения высокой скорости производства яиц. Представленные здесь устройства, системы и способы позволяют кормить или иным образом обрабатывать птиц в каждой из множества подгрупп с различной средней массой тем способом, который предназначен для улучшения условий содержания птиц, имеющих массу, связанную с соответствующей подгруппой.
Представленные здесь устройства, системы и способы могут обеспечить более эффективное выполнение сортировки. Представленные здесь устройства, системы и способы могут быть выполнены с возможностью улучшения эргономических условий для операторов системы, например, по сравнению с процессами ручной сортировки.
Представленные здесь устройства, системы и способы могут также предлагать возможность выполнения автоматического сбора данных для каждой отдельной птицы в каждой из по меньшей мере двух подгрупп. Соответствующую информацию о массе можно использовать в качестве информации управления, например, при определении количества корма для птиц каждой из подгрупп и/или для оценки степени однородности в каждой из подгрупп. Представленные здесь устройства, системы и способы могут также предлагать возможность снижения риска неточного подсчета птиц в каждой из подгрупп, что в противном случае привело бы к назначению неправильного количества корма.
Поскольку настоящее изобретение может быть выполнено в нескольких формах, не выходя за его рамки или основные характеристики, следует понимать, что описанный выше вариант осуществления не ограничен какой-либо из деталей вышеприведенного описания, если не указано иное, но скорее должен толковаться широко и в объеме, определенном в прилагаемой формуле изобретения, и поэтому все изменения и модификации, которые попадают в настоящее изобретение, предназначены для включения в прилагаемую формулу изобретения.
Кроме того, в формуле изобретения слово «содержащий» не исключает других элементов или этапов, а неопределенный артикль не исключает множественного числа. Один блок может выполнять функции нескольких признаков, указанных в формуле изобретения. Термины «по существу», «примерно», «приблизительно» и аналогичные в связи со свойством или значением, в частности, также определяют точное свойство или соответственно точное значение. Любые ссылочные позиции в формуле изобретения не должны истолковываться как ограничивающие ее объем.
Реферат
Группа изобретений относится сельскому хозяйству, а именно к устройству, системе и способу обработки, сортировки и вакцинации живых птиц. Устройство (1) содержит основной элемент (10); принимающий элемент (20) с возможностью поворота, прикрепленный к основному элементу и выполненный с возможностью приема и удерживания птиц за их лопаточно-плечевые суставы в первом положении и освобождения птиц во втором положении; и запирающий элемент (30), прикрепленный с возможностью перемещения к основному элементу и выполненный с возможностью блокировки принимающего элемента в первом положении и высвобождения принимающего элемента для поворота из первого положения во второе положение для освобождения птиц. Система обработки и сортировки птиц содержит по меньшей мере один фиксирующий элемент, выполненный с возможностью прикрепления по меньшей мере одного устройства (1). Способ включает этапы: приема и удерживания птицы за ее лопаточно-плечевой сустав принимающим элементом в первом положении; автоматического поворота принимающего элемента вокруг первой оси из первого положения во второе положение, тем самым освобождая птицу, и поворота принимающего элемента. Обеспечивается повышение пропускной способности процесса, уменьшение повреждений живой птицы и ее стресса. 3 н. и 17 з.п. ф-лы, 10 ил.
Комментарии