Система для кормления животных - RU2695444C2
Код документа: RU2695444C2
Чертежи






















Описание
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится в целом к устройствам для кормления животных и в частности к кормовому контейнеру для животных и системе для кормления животных.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Известны различные виды систем для кормления животных, предназначенные для подачи сухого и влажного (мягкого) кормов животным, например домашним животным. Корм, как сухой, так и влажный, поступает в разнообразных контейнерах (или капсулах, причем указанные термины применяются на протяжении всего документа взаимозаменяемым образом).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на создание усовершенствованных кормового контейнера для животных и системы для кормления животных, как описано более подробно ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Более полная оценка и понимание данного изобретения могут быть получены при рассмотрении нижеприведенного подробного описания совместно с чертежами, на которых:
фиг. 1 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, выполненной и функционирующей в соответствии с неограничивающим вариантом выполнения изобретения, при этом транспортер для кормового контейнера показан в положении готовности до приема кормового контейнера,
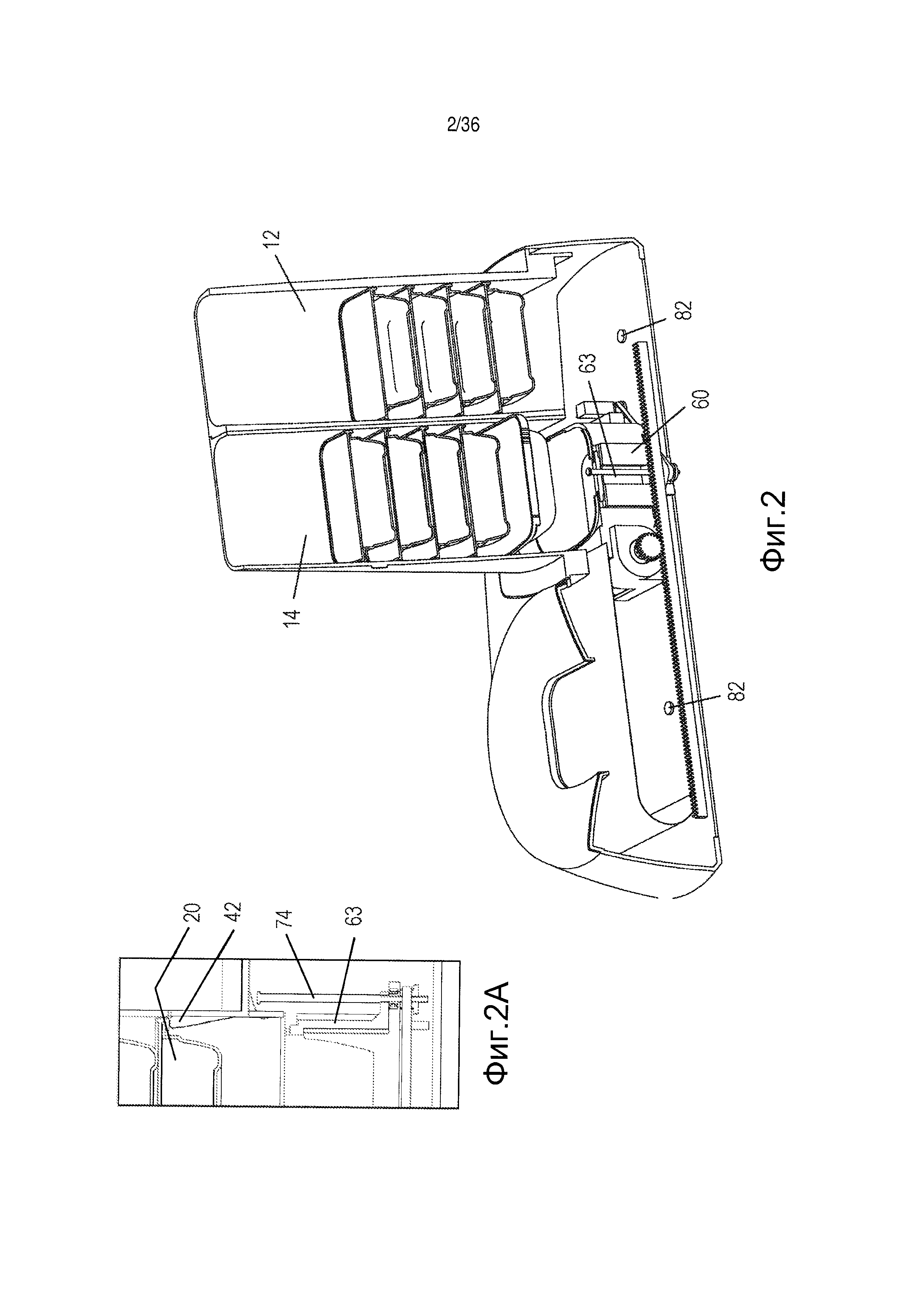
фиг. 2 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом транспортер перемещен к секции хранения корма, содержащей стопку кормовых контейнеров,
фиг. 2А изображает упрощенный вид одного из опорных элементов (например фиксатора), который поддерживает самый нижний кормовой контейнер, показанный на фиг. 2,
фиг. 3 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом подъемный механизм транспортера поднят для высвобождения самого нижнего кормового контейнера,
фиг. 3А изображает упрощенный вид одного из кронштейнов тележки, который задвинут в фиксатор, показанный на фиг. 3,
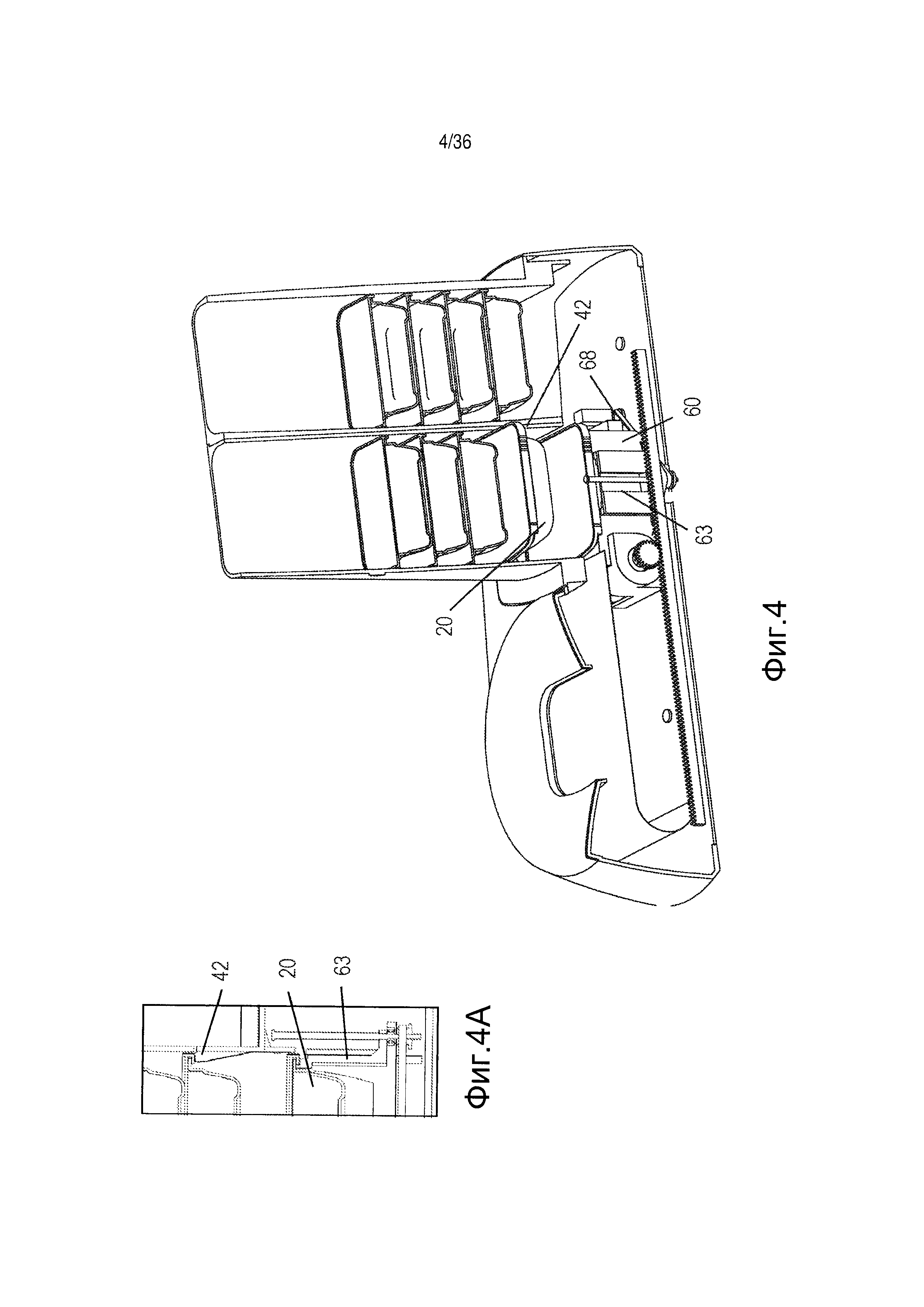
фиг. 4 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом подъемный механизм опущен для переноса высвобожденного кормового контейнера к транспортеру,
фиг. 4А изображает упрощенный вид следующего кормового контейнера, расположенного непосредственно над высвобожденным кормовым контейнером и в данный момент поддерживаемого опорным элементом (например фиксатором), показанным на фиг. 4,
фиг. 5 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом транспортер перемещен вперед вместе с кормовым контейнером для обеспечения частичного снятия закупоренного закрывающего элемента с указанного контейнера,
фиг. 6 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом транспортер достиг положения раздачи и остановлен, а закупоренный закрывающий элемент вскрыт (например снят) с обеспечением открытия кормового контейнера,
фиг. 7 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, причем подъемный механизм поднят с обеспечением перемещения кормового контейнера вровень с чашей кормушки для исключения любых потерь частиц корма между контейнером и чашей, и контейнер готов к кормлению из него,
фиг. 8 изображает упрощенный графический вид в частичном разрезе системы для кормления животных в состоянии после кормления, при этом подъемный механизм опущен,
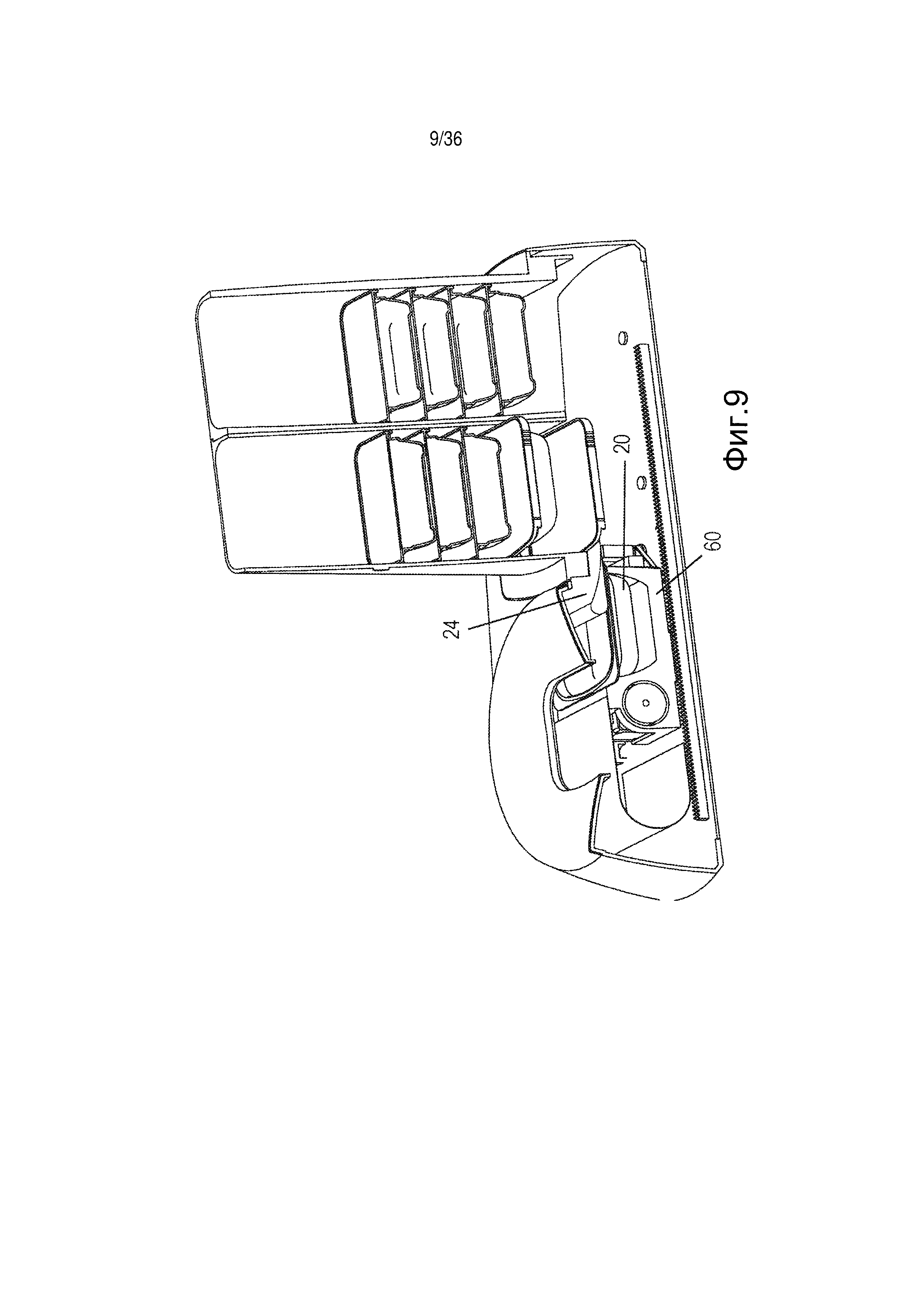
фиг. 9 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом транспортер частично перемещен назад,
фиг. 10 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом транспортер вместе с использованным кормовым контейнером перемещен обратно таким образом, что закрывающий элемент снова закрывает контейнер с обеспечением блокирования любых исходящих из него запахов и предотвращения проникновения в него любых насекомых или вредителей,
фиг. 11 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом транспортер и использованный кормовой контейнер перемещены под секцию сбора отходов,
фиг. 11А изображает упрощенный вид положения кронштейнов тележки, показанных на фиг. 11,
фиг. 12 изображает упрощенный вид в частичном разрезе системы для кормления животных, при этом подъемный механизм выполнил подъем использованного кормового контейнера с обеспечением его размещения в секции сбора отходов,
фиг. 12А изображает упрощенный вид опорного элемента, поддерживающего на данном этапе использованный кормовой контейнер, показанный на фиг. 12,
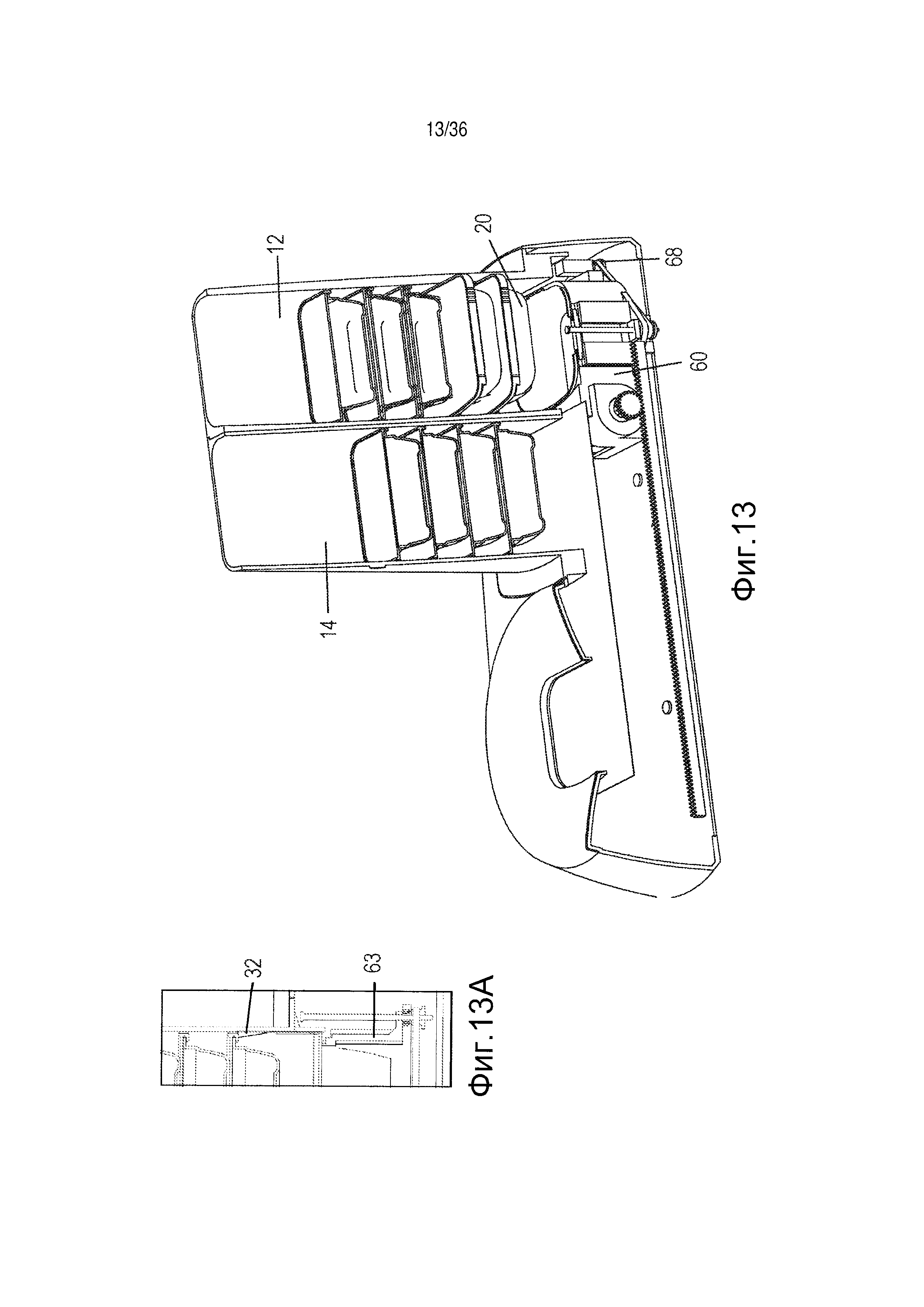
фиг. 13 изображает упрощенный графический вид в частичном разрезе системы для кормления животных, при этом подъемный механизм перемещен вниз, использованный кормовой контейнер удерживается внутри секции сбора отходов, а транспортер пуст и находится в исходном положении готовности для повторного запуска цикла,
фиг. 13А изображает упрощенный вид использованного кормового контейнера, поддерживаемого опорным элементом внутри секции сбора отходов, показанной на фиг. 13,
фиг. 14 изображает упрощенный графический вид секции сбора отходов и секции хранения корма, отсоединенных от системы для кормления животных,
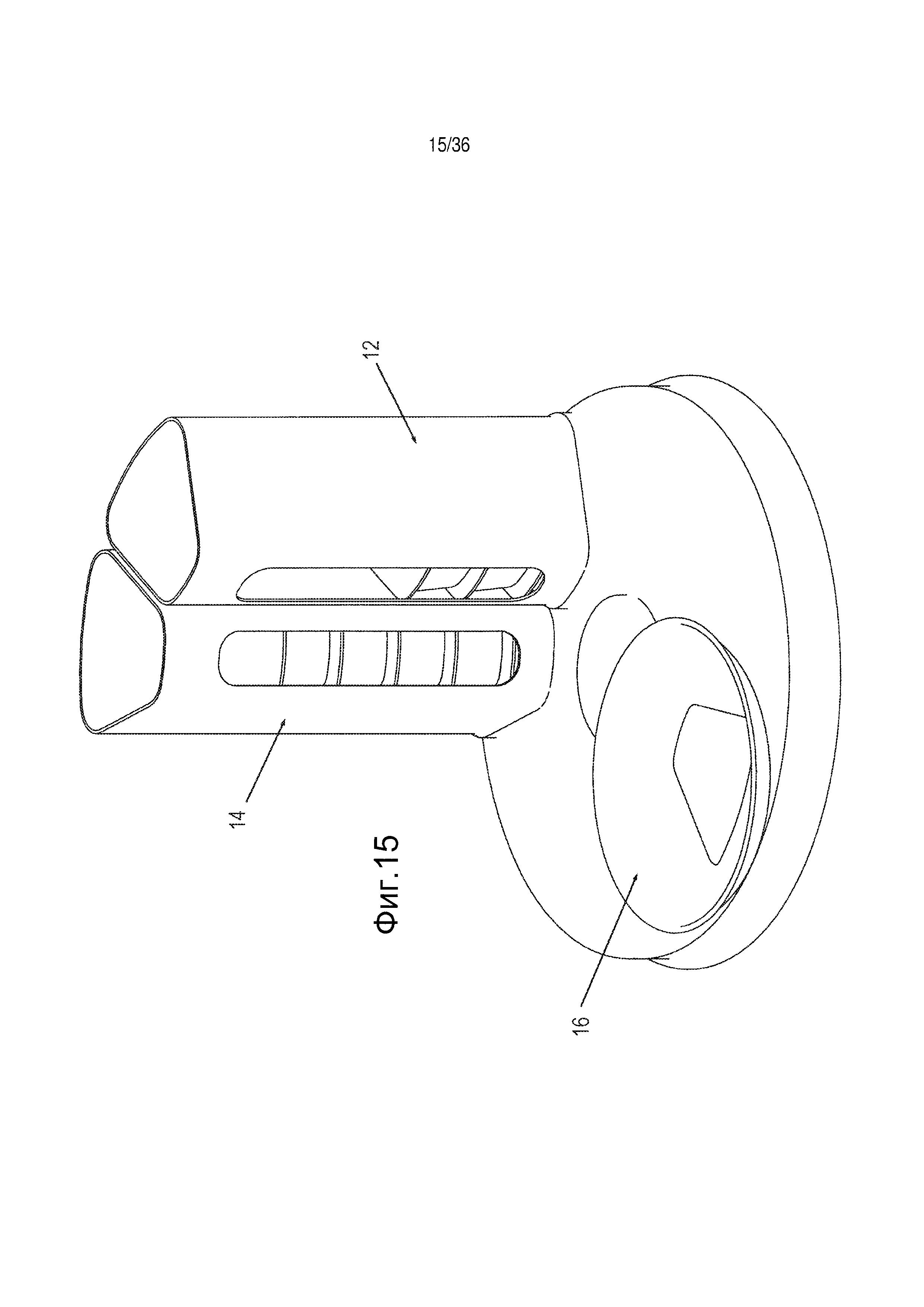
фиг. 15 изображает упрощенный графический вид секции сбора отходов и секции хранения корма, расположенных в криволинейной (например круговой) конфигурации,
фиг. 16 изображает упрощенный графический вид нескольких секций хранения корма в системе для кормления животных,
фиг. 17А-17I изображают упрощенные графические виды различных типов кормовых контейнеров в соответствии с неограничивающими вариантами выполнения изобретения,
фиг. 18А-18D изображают упрощенные графические виды системы для кормления животных, управляемой вручную, выполненной и функционирующей в соответствии с неограничивающим вариантом выполнения изобретения, и
фиг. 19А-19Е изображают упрощенные виды сложенных контейнеров, раскрываемых с получением раздаточных контейнеров, в соответствии с различными вариантами выполнения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
На фиг. 1 изображена система 10 для кормления животных, выполненная и функционирующая в соответствии с неограничивающим вариантом выполнения изобретения.
Система 10 содержит секцию 12 сбора отходов, секцию 14 хранения корма, открывающий механизм 15 для открывания кормовых контейнеров, секцию 16 кормления и транспортер 18 для перемещения кормовых контейнеров 20 от одной секции к другой, как описано более подробно ниже.
Кормовой контейнер 20
Кормовой контейнер 20 для животных содержит любой вид корма, сухой или мягкий (термины «мягкий» и «влажный» используются взаимозаменяемым образом). Контейнер 20 может быть изготовлен из пластмассы (в том числе многослойной), металла или любого другого подходящего материала, предназначенного для упаковки в него корма для животных. Контейнер 20 может быть герметично запечатан, то есть изолирован от попадания в него и выхода из него возбудителей инфекции, бактерий, кислорода или других веществ. Контейнер 20 может выдерживать стерилизацию (например, но без ограничения этим, в течение 25 минут при температуре 140°) и давления, возникающие в процессе стерилизации.
Контейнер 20 может содержать съемную крышку 22 (например, выполненную из пластмассы или алюминия), расположенную на основании 23 с ободком. Как вариант, контейнер 20 может содержать закупоривающее средство, такое как пленочная крышка 24 (непроницаемая, например из алюминиевой пленки), пластмасса, припаянная по ободку контейнера, и при этом не иметь дополнительной крышки. Как вариант, может использоваться комбинация крышки и расположенного под ней отдельного закупоривающего средства (например пленки), обычно применяемого во многих пищевых упаковках, например, для молочных продуктов, салатов и т.д. Выражения «пленка» или «пленочное закупоривающее средство» охватывают любой гибкий материал (например, но без ограничения этим, тонкую пластмассу или металлические мембраны, фольгу, листовые материалы и т.п.), который может обеспечить закрывание и запечатывание контейнера с получением заданной степени герметичности и который может быть снят, сорван или стянут с контейнера.
Как описано ниже, контейнер 20 может быть открыт с помощью открывающего механизма 15 подающего устройства 10, который может поднимать/захватывать элемент для удерживания, имеющийся в контейнере, такой как специальный кончик/пленка/крышка или любой другой элемент. После использования контейнер 20 может быть повторно запечатан/закрыт. Например, пленочная крышка может быть адгезионно прикреплена обратно на ободок (например, с помощью адгезивного материала). В качестве другого примера, крышка может быть помещена обратно на место и поворотно запечатана или частично запечатана на контейнере. Такое повторное запечатывание может способствовать устранению неприятного запаха (от остатков пищи в использованном контейнере) и исключению проникновения в использованный контейнер муравьев и других насекомых и вредителей.
Контейнер 20 может содержать корм различных видов, например, но без ограничения этим, мягкий корм (в полужидком виде, в виде мелких, крупных кусков или корм любого другого вида, имеющийся в продаже), влажный корм, сухой корм и лакомства, любого вкуса и вида.
Система для кормления может работать со всеми видами контейнеров, в том числе с различными размерами и формами контейнеров одновременно, например, но без ограничения этим, с одноразовыми контейнерами, контейнерами малого размера, контейнерами большого размера, контейнерами с несколькими отделениями и т.д.
Контейнер 20 может представлять собой контейнер для корма нескольких/двух типов (например, с отдельными ячейками для влажного и сухого корма). Опционально, разные виды корма могут быть смешаны друг с другом перед открыванием, в процессе открывания или после открывания с помощью смешивающего и/или раздаточного устройства, имеющегося в системе для кормления или входящего в состав контейнера.
Контейнер 20 может быть неглубоким, иметь плавно скругленные углы и не иметь острых кромок для исключения нанесения какого-либо вреда домашним животным и обеспечения простого доступа и кормления. Ниже приведено более подробное описание различных видов кормовых контейнеров, которые могут использоваться при осуществлении изобретения.
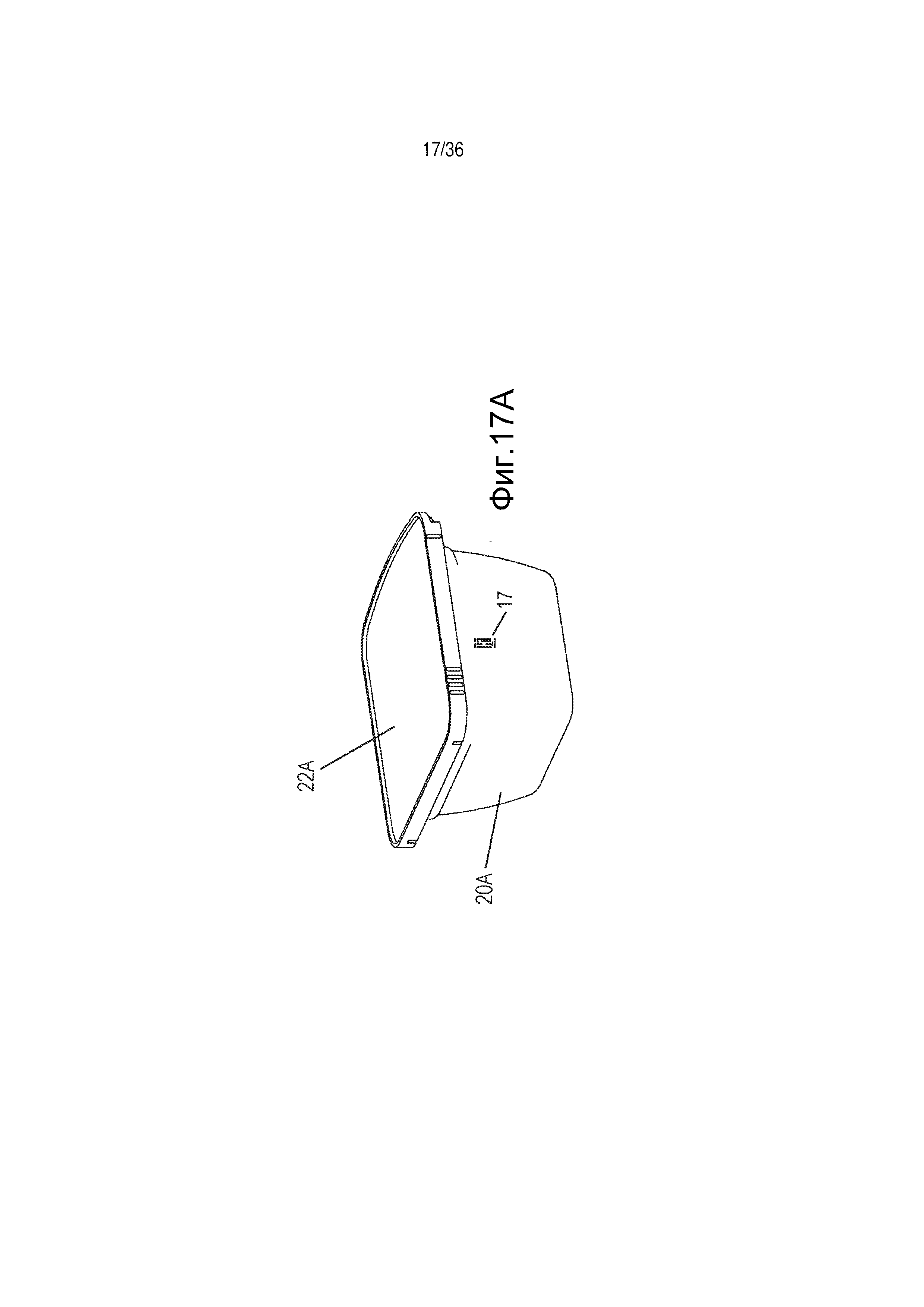
Контейнер 20 может иметь читаемый код 17 (фиг. 17А) для распознавания типа корма/контейнера (размер, вкус, мясо, овощи, смешанные виды или любой другой определяющий признак) системой для кормления, например, но без ограничения этим, штриховой код, QR-код, коды с окружными полосами/кольцами, радиочастотную метку или цветовое кодирование для оптико-электронного считывания цвета (или любого другого вида считывания), или любой специальный код для выявления различий между различными кормами и/или контейнерами, или код аутентификации, распознаваемый системой для кормления, причем если код авторизован, кормовой контейнер может использоваться с системой, а если код не авторизуется, контейнер не допускается к использованию с системой.
Секция 12 сбора отходов
Термин «секция», применяемый на протяжении описания и формулы изобретения, подразумевает любое соответствующее место для размещения кормовых контейнеров, не содержащее корпуса или содержащее корпус, по меньшей мере частично расположенный вокруг контейнеров. В изображенном варианте выполнения секция 12 сбора отходов представляет собой удлиненный (или имеющий любую другую альтернативную форму) корпус для хранения использованных контейнеров 20, уложенных в стопку (или в виде любой другой конфигурации, упорядоченной или не упорядоченной). Секция 12 содержит один или более опорных элементов 32, например, но без ограничения этим, фиксаторов, которые выступают от внутренних сторон указанной секции и поддерживают самый нижний из контейнеров 20. Как вариант, стороны секции 12 могут быть скошены книзу, так что самый нижний контейнер удерживается вследствие уменьшенного периметра скошенных сторон. Скошенные стороны также называются опорными элементами 32. Как описано ниже, транспортер 18 может обеспечивать добавление контейнеров 20 в нижнюю часть стопки путем высвобождения/выталкивания самого нижнего контейнера 20 и его замены другим использованным контейнером 20, который теперь становится самым нижним в стопке. (Это также происходит в случае скошенных сторон секции 12, в котором направленное вверх усилие является достаточным для преодоления части секции с уменьшенным периметром и проталкивания контейнера в стопку).
Секция 12 сбора отходов может быть выполнена с возможностью ее удаления из системы 10, например, с помощью отсоединяемых крепежных средств (таких как защелкивающиеся язычки, которые прикрепляют секцию 12 к системе 10) для простого удаления использованных контейнеров. Как вариант, секция 12 может быть просто вставлена в систему 10 и удерживаться на месте под действием собственного веса. На фиг. 14 изображены секция 12 сбора отходов и секция 14 хранения корма, отсоединенные от системы 10. В дополнение или как вариант, секция 12 может иметь дверцу или окно доступа (например удлиненный паз, как на фиг. 14-16) для предоставления доступа к использованным контейнерам и их удаления. В дополнение или как вариант, секция 12 может иметь выходное отверстие 34, через которое удаляют использованные кормовые контейнеры.
В варианте выполнения, изображенном на фиг. 1, секция 12 сбора отходов расположена на одной линии с секцией 14 хранения корма. Как вариант, секция 12 может быть расположена в других местоположениях относительно секции 14, например так, как показано на фиг. 15, где секции 12 и 14 расположены в криволинейной (например круговой) конфигурации. В другом случае положения секции 12 сбора отходов и секции 14 хранения корма могут быть поменяны местами. Опционально секция 12 может содержать крышку. Опционально секция 12 может быть герметично запечатана с предотвращением выхода неприятных запахов и т.п. и проникновения в нее насекомых или других вредителей. Опционально подающее устройство 10 может содержать несколько секций 12 сбора отходов, аналогично тому, как показано на фиг. 16 для нескольких секций хранения корма. Как вариант, секция сбора отходов может использоваться в качестве секции хранения корма и аналогичным образом, как вариант, секция хранения корма может использоваться в качестве секции сбора отходов.
Секция 14 хранения корма
В изображенном варианте выполнения секция 14 хранения корма представляет собой удлиненный (или имеющий любую другую альтернативную форму) корпус для хранения кормовых контейнеров 20, уложенных в стопку (или в виде любой другой конфигурации, упорядоченной или не упорядоченной). Секция 14 хранения корма содержит один или более опорных элементов 42, например, но без ограничения этим, фиксаторов, которые выступают от внутренних сторон указанной секции и поддерживают самый нижний из контейнеров 20. Как вариант, стороны секции 14 могут быть скошены книзу, так что самый нижний контейнер удерживается вследствие уменьшенного периметра скошенных сторон (но может быть высвобожден, например, путем проталкивания через часть с уменьшенным периметром при помощи механизма транспортера/подъемника). Скошенные стороны также называются опорными элементами 42. Как описано ниже, транспортер 18 может обеспечивать высвобождение самого нижнего контейнера 20 из стопки для его перемещения к открывающему механизму 15 и секции 16 кормления.
Секция 14 хранения корма может быть заполнена контейнерами 20 путем простого размещения кормовых контейнеров друг над другом через входное отверстие 44. В дополнение или как вариант, секция 14 может иметь дверцу или окно доступа (например удлиненный паз, как на фиг. 14-16) для предоставления доступа и пополнения секции 14 дополнительными кормовыми контейнерами.
Секция 14 может быть выполнена с возможностью ее удаления из системы 10, например, с помощью отсоединяемых крепежных средств (таких как защелкивающиеся язычки, которые прикрепляют секцию 12 к системе 10) для ее простой очистки или простой установки кормовых контейнеров. Как вариант, секция 14 может быть просто вставлена в систему 10 и удерживаться на месте под действием собственного веса. Опционально секция 14 может иметь крышку.
В изображенном варианте выполнения секция 14 хранения корма расположена на одной линии с секцией 12 сбора отходов. Как вариант, секция 14 может быть расположена в других местоположениях относительно секции 12, как показано на фиг. 15.
Секция 14 может быть заполнена одним видом или различными видами корма. В дополнение или как вариант, может быть выполнено более одной секции 14 с одним видом или различными видами корма, как показано на фиг. 16, на которой изображено несколько секций 14. Например, согласно фиг. 16 одна секция может использоваться для хранения влажного корма, а другая - для хранения сухого корма. В дополнение или как вариант, секция 14 может быть модульной, то есть к стопке кормовых контейнеров могут быть добавлены дополнительные модули из контейнеров для увеличения объема и ассортимента кормов, предназначенных для животных. Для управления выбором вида корма, предоставляемого животному из соответствующей секции хранения корма, и момента кормления согласно графику может использоваться контроллер.
Открывающий механизм 15
В изображенном варианте выполнения открывающий механизм 15 содержит ограничитель 46, который упирается в передний край съемной крышки 22. Когда транспортер 18 перемещает контейнер 20 мимо механизма 15, крышка 22 не может пройти мимо ограничителя 46, что обеспечивает стягивание крышки 22 и/или закупоривающего средства 24 (или их снятие иным образом, например путем отрывания) с верхней части контейнера 20.
Как вариант, механизм 15 может содержать захватный элемент (например щипцы), который захватывает край или другую часть крышки и/или закупоривающего средства и стягивает, приподнимает или иным образом удаляет крышку и/или закупоривающее средство.
Как вариант, механизм 15 может содержать режущий механизм, разрезающий часть крышки 22 и/или средства 24, которое (которая) остается на контейнере в виде клапана, используемого для последующего повторного закрывания.
Открывающий механизм 15 может быть частью секции 14 хранения корма и/или другой частью системы 10 для кормления. В одном варианте выполнения изобретения механизм 15 обеспечивает открывание контейнера 20, когда тот проходит мимо механизма 15, с обеспечением тем самым доступности содержимого контейнера 20 для кормления животного. Механизм 15 обеспечивает открывание контейнера 20 таким образом, что контейнер 20 может быть повторно закрыт/запечатан после того, как животное поело, так что контейнер 20 может быть передан на хранение в секцию 12 сбора отходов без исходящих от него неприятных запахов и без проникновения в него насекомых или других вредителей. Механизм 15 может использоваться для открывания стандартных, серийно выпускаемых кормовых контейнеров или специальных кормовых контейнеров, предназначенных для целевого использования с системой 10.
В одном варианте выполнения изобретения открывающий механизм 15 также является закрывающим механизмом, при этом перемещение контейнера в обратном направлении мимо открывающего механизма приводит к его повторному закрыванию/запечатыванию. Как вариант, для повторного закрывания/запечатывания использованного контейнера может быть предусмотрен отдельный закрывающий механизм (например, но без ограничения этим, кулачок, прилив и т.д.).
Секция 16 кормления
В изображенном варианте выполнения секция 16 кормления содержит верхнюю чашеобразную часть 19 с отверстием 50, имеющим такой размер, что, когда контейнер 20 поднят и примыкает к нижней стороне отверстия 50, он герметично прижат к отверстию 50, как описано ниже. Отверстие 50 представляет собой сквозное отверстие, то есть отверстие, не являющееся глухим. Контейнер 20 и верхняя чашеобразная часть 19 совместно образуют готовую кормушку 16. Часть 19 имеет наклонную верхнюю поверхность 48, которая обеспечивает соскальзывание или скатывание обратно в контейнер корма, отброшенного животным. Часть 19 может быть снята для очистки и мытья. Часть 19 может быть выполнена из пластмассы или металла (например нержавеющей стали).
Эластомерное уплотнение 69 (например уплотнение из резины, силиконового каучука, неопрена и т.д.), расположенное вокруг нижнего ободка отверстия 50 чашеобразной части 19, обеспечивает непроницаемость между контейнером 20 и частью 19 после прикрепления (например прижатия) контейнера 20 к части 19.
Транспортер 18
Транспортер 18 представляет собой любое подходящее средство для переноса (перемещения) изделия от одного места к другому. В изображенном варианте выполнения транспортер 18 содержит тележку 60, которая перемещается вдоль первой оси 62 (в обоих направлениях) с помощью первого привода 64 и, опционально, вдоль второй оси 66 (в обоих направлениях) с помощью второго привода 68. В изображенном варианте выполнения первый привод 64 представляет собой двигатель с ведущим зубчатым колесом 70, которое зацепляется с зубчатой рейкой 72, а первая ось является горизонтальной осью. В изображенном варианте выполнения второй привод 68 представляет собой двигатель, обеспечивающий поворот одного или более резьбовых или червячных валов 74, по которым перемещаются установленные один или более кронштейнов 63 тележки. Кронштейны 63 перемещаются вдоль второй оси 66 (например, вверх и вниз, при этом ось является вертикальной). В изображенном варианте выполнения имеется два параллельных вала 74, которые функционально соединены со вторым приводом 68 при помощи ремня (или другого механизма, например зубчатой передачи). В качестве первого и второго приводов 64 и 68 могут использоваться другие приводы, например, но без ограничения этим, пневматический или гидравлический линейный привод, шаговый двигатель, редукторный двигатель, электрический/электронный линейный привод и другие. Как описано ниже, кронштейны 63 используются для высвобождения опорных элементов 42, поддерживающих самый нижний контейнер 20 в стопке контейнеров, расположенных в секции 14 хранения корма, после чего кронштейны 63 опускают контейнер 20 в тележку 60. Кронштейны 63 также обеспечивают подъем пустого контейнера в стопку из пустых контейнеров, расположенных в секции 12 сбора отходов, путем аналогичного высвобождения опорных элементов 32 и подъема использованного контейнера в стопку контейнеров, находящихся в секции 12, так, что контейнер поддерживается опорными элементами 32.
Контроллер 80
Система 10 для кормления животных содержит контроллер (процессор) 80 (фиг. 1) для управления всеми режимами ее работы. Контроллер 80 может работать, без ограничения этим, с помощью соединения по беспроводной связи (Wi-Fi, Bluetooth, NFS (сетевая файловая служба), сотовая связь, Интернет-подключение) или проводной связи (например USB). Контроллер 80 может взаимодействовать с различными датчиками 82, например, но без ограничения этим, датчиками положения, регистрирующими положение тележки 60 (например герконовыми переключателями, контактными переключателями, инфракрасными или оптическими датчиками, индукционными или емкостными датчиками и т.д.), датчиками, регистрирующими уровень корма в контейнере, датчиками, регистрирующими присутствие или отсутствие кормящегося животного, датчиками, установленными в секции 12 сбора отходов и секции 14 хранения корма и регистрирующими количество контейнеров 20, хранящихся в указанных секциях (например инфракрасными или оптическими датчиками, датчиками веса и т.д.), и/или датчиками, установленными в секции 16 кормления и регистрирующими прием пищи животным, в том числе частоту приемов пищи, скорость кормления и другие факторы (например инфракрасными или оптическими датчиками, камерами, веб-камерами и т.д.). Контроллер 80 может использоваться для запуска, изменения и остановки рабочего цикла. Контроллер 80 также может управлять работой системы, имеющей доступ в Интернет, или приложением для мобильного устройства, используемым для контроля количества использованных кормовых контейнеров, контроля поведения животного при кормлении, закупки дополнительных кормовых контейнеров через Интернет, коммуникации с животным и многого другого.
Типичный рабочий цикл
Рабочий цикл может быть инициирован вручную (например, с помощью переключателя), с помощью полуавтоматической операции (например, датчик регистрирует присутствие животного) или полностью автоматическим образом (например, согласно запрограммированному плану кормления) и может регулироваться на месте (например, с помощью переключателя на устройстве), беспроводным способом (например, с сотового телефона, портативного компьютера, через Интернет и т.д.) или любым другим подходящим способом.
На фиг. 1 тележка 60 находится в положении готовности под секцией 12 сбора отходов. На данном этапе тележка 60 пуста.
Как показано на фиг. 2, после запуска процесса кормления (например, с помощью переключателя или контроллера) тележка 60 перемещается и останавливается под секцией 14 хранения корма (при помощи датчика положения или согласно точному положению шагового двигателя). На фиг. 2А хорошо виден один из опорных элементов 42, в данном случае поворотный или подпружиненный фиксатор, выступающий от внутренних сторон секции 14 и поддерживающий самый нижний кормовой контейнер 20. Кронштейны 63 тележки еще не подняты вверх.
В состоянии, показанном на фиг. 3, второй привод 68 обеспечил подъем одного или более кронштейнов 63 от тележки 60. В результате этого действия происходит высвобождение нижнего контейнера 20, например, путем раскрытия фиксаторов 42, расположенных по бокам секции 14, как показано на фиг. 3А (на которой кронштейны 63 задвинуты в фиксаторы). На данном этапе высвобожденный контейнер опирается на второй привод 68 (располагаясь на кронштейнах 63 или будучи захваченным кронштейнами 63).
Как вариант, второй привод 68 может содержать выталкивающий элемент, который используется для выталкивания отдельного контейнера 20 из стопки контейнеров. Выталкивающий элемент может содержать, без ограничения этим, кулачок или аналогичный элемент, который выталкивает отдельный контейнер, высвобождая его и отделяя от стопки (аналогично действию обоймы с патронами в отверстии магазина в револьвере или винтовке). В таком варианте выполнения имеется возможность использования только первого привода 64 и выталкивания контейнера из стопки без необходимости во втором приводе. Расположение использованного контейнера в секции сбора отходов может быть выполнено с помощью тележки, при этом использованный контейнер перемещается под указанную секцию, после чего задвигается в стопку использованных кормовых контейнеров.
В состоянии, показанном на фиг. 4, второй привод 68 выполнил опускание кронштейна (кронштейнов) 63, опустив тем самым освобожденный кормовой контейнер в тележку 60. После того, как второй привод 68 инициирует перемещение вниз, раскрытый опорный элемент 42 (в случае использования фиксаторов) высвобождается и перемещается обратно внутрь в положение фиксации. Теперь опорный элемент 42 поддерживает следующий кормовой контейнер, находящийся непосредственно над высвобожденным контейнером, как показано на фиг. 4А.
На фиг. 5 тележка 60 начала перемещаться вперед вместе с контейнером 20. Крышка 22 контейнера удерживается на месте непосредственно под секцией 14 для хранения корма при помощи ограничителя 46. Ограничитель 46 обеспечивает возможность прохождения контейнера 20 непосредственно под ним, но захватывает или удерживает крышку 22 на месте, в то время как контейнер 22 перемещается горизонтально вперед. Это обеспечивает относительное горизонтальное скользящее перемещение между контейнером 20 и крышкой 22. Как указано выше, к верхнему ободку кормового контейнера прикреплено пленочное закупоривающее средство 24 для обеспечения запечатывания контейнера, предпочтительно герметичным образом. Кроме того, средство 24 прикреплено или иным способом присоединено к передней части крышки 22. Таким образом, скользящее перемещение между контейнером 20 и крышкой 22 обеспечивает оттягивание закупоривающего средства 24 назад, вызывая тем самым его плавное отделение от верхнего ободка контейнера 20. На фиг. 5 закупоривающее средство 24 показано в частично снятом состоянии в процессе открывания кормового контейнера.
На фиг. 6 тележка 60 достигла положения кормления и остановилась под секцией 16 кормления. Закупоривающее средство 24 полностью снято, и контейнер 20 полностью открыт.
Следует отметить, что передний край средства 24 все еще соединен с передней частью крышки 22, а задняя сторона средства 24 все еще соединена с задней частью ободка контейнера 20. На данном этапе закупоривающее средство 24 перевернуто, и его нижняя сторона (обращенная к корму) теперь повернута вверх. В результате средство 24 удерживается в расправленном и плоском состоянии с предотвращением закручивания пленки (стянутая пленка имеет тенденцию к закручиванию и сворачиванию в трубку) и исключением стекания сока/масла или остатков корма, прилипшего к пленке. Как вариант, закупоривающее средство 24 может быть полностью удалено, отсоединено или стянуто.
В состоянии, показанном на фиг. 7, второй привод 68 выполнил подъем кронштейнов 63 с обеспечением прикрепления (например плотного прижатия) контейнера 20 к нижней стороне верхней чашеобразной части 19 для образования готовой кормушки 16 и исключения тем самым любого проникновения корма/масла/сока между контейнером 20 и кормушкой 16. Как указано выше, уплотнение 69 обеспечивает непроницаемость между контейнером 20 и частью 19 после прижатия контейнера 20 к части 19.
Опционально, когда чаша не используется и контейнер 20 не вставлен, отверстие части 19 может быть закрыто клапаном 71. Клапан 71 может закрывать отверстие с нижней стороны и открывается под действием тележки, подвозящей контейнер 20 к отверстию. Например, кормовой контейнер может просто перемещать клапан 71 в сторону, клапан может откидываться или может сгибаться или перегибаться, как в ленточном транспортере. Как вариант, клапан 71 может открываться под действием контроллера 80, который синхронизирует открывание клапана с прибытием тележки.
После прикрепления контейнера 20 к чашеобразной части 19 животное может подойти и поесть. Контроллер 80 (фиг. 1) управляет логической схемой и моментом изъятия контейнера 20, например, но без ограничения этим, функцией времени (например, средним временем продолжительности кормления), датчиком уровня корма, датчиком, регистрирующим присутствие домашнего животного, и др.
На фиг. 8 второй привод 68 выполнил опускание кронштейнов 63 для перемещения контейнера 20 вниз и в сторону от отверстия части 19.
На фиг. 9 тележка 60 перемещена назад вместе с использованным контейнером 20. В результате перемещения тележки пленка 24 снова начинает закрывать контейнер 20. (Опционально, повторному запечатыванию пленки по ободку контейнера может способствовать адгезивное вещество, как описано подробно ниже).
На фиг. 10 тележка 60 и использованный контейнер 20 перемещены обратно под секцию 14 хранения корма, в результате чего обеспечено повторное закрывание и/или запечатывание контейнера 20 крышкой 22 и/или закупоривающим элементом 24. Использованный контейнер 20 запечатан или частично запечатан для исключения неприятного запаха от остатков корма и проникновения каких-либо насекомых, например муравьев.
По достижении данного положения крышка 22 и/или элемент 24 и контейнер 20 снова полностью совпадают друг с другом, но тележка 60 не обязательно должна останавливаться, вместо этого тележка 60 может непрерывным образом перемещаться по направлению к секции 12 сбора отходов (канистре). Крышка 22 и/или элемент 24 удерживаются на месте до тех пор, пока контейнер 20 не будет полностью вставлен обратно, после чего крышка 22 и/или элемент 24 могут свободно перемещаться назад вместе с использованным контейнером 20.
На фиг. 11 тележка 60 и использованный контейнер 20 перемещены обратно под секцию 12 сбора отходов. Тележка 60 остановлена в ее исходном положении готовности, однако теперь в ней находится использованный контейнер 20. На фиг. 11А показано положение кронштейнов 63.
На фиг. 12 второй привод 68 выполнил подъем кронштейнов 63 для подъема использованного контейнера 20 с прохождением мимо опорного элемента 32 (фиг. 12А) секции 12 сбора отходов. Кронштейны 63 тележки поддерживают использованный контейнер 20, как показано на фиг. 12А.
На фиг. 13 второй привод 68 выполнил опускание кронштейнов 63, в результате чего использованный контейнер 20 оставлен опирающимся на элемент 32 внутри секции 12, как показано на фиг. 13А. Тележка 60 снова пустая и находится в исходном положении готовности. На данном этапе полный цикл кормления завершен и произошло возвращение в положение готовности, показанное на фиг. 1 (за исключением того, что теперь в секции 14 хранения корма на один контейнер меньше, а в секции 12 сбора отходов на один использованный контейнер больше).
На фиг. 17А-17I изображены различные типы кормовых контейнеров в соответствии с неограничивающими вариантами выполнения изобретения. Контейнеры могут иметь любой, большой или маленький, размер или форму, например, но без ограничения этим, представлять собой одноразовые контейнеры, контейнеры малого размера, контейнеры большого размера, контейнеры с несколькими отделениями и т.д. Контейнеры могут быть закрыты крышкой, закупоривающим элементом (например пленкой), крышкой с закупоривающим элементом или другими средствами и могут отличаться многочисленными особенностями открывания.
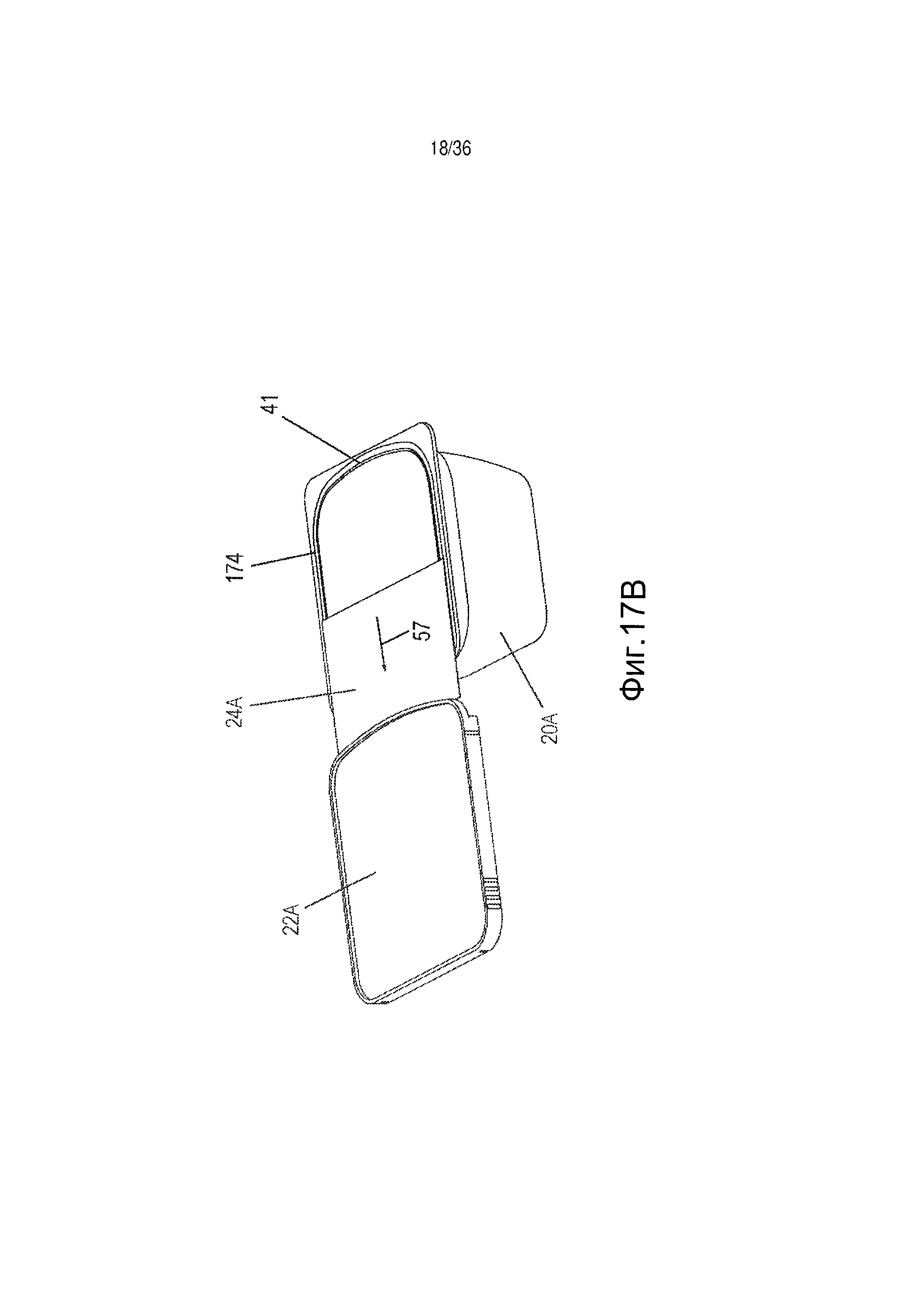
На фиг. 17А, 17В и 17С изображен контейнер 20А со сдвигаемой крышкой 22А соответственно в закрытом, частично открытом и полностью открытом положениях. Закупоривающий элемент 24А постепенно стягивается с контейнера 20А для открытия его съедобного содержимого. После использования контейнера он может быть повторно закрыт/запечатан элементом 24А, как описано выше.
На фиг. 17С изображен кормовой контейнер 20А с оттянутым назад пленочным закупоривающим элементом 24А. Элемент 24А может быть присоединен к верхней части контейнера, например, путем тепловой или звуковой сварки или путем прикрепления вдоль линии, образующей на контейнере линию 174 стягивания. Может быть предусмотрена линия адгезивного вещества 176 для повторного закрывания, запечатывания или частичного запечатывания контейнера элементом 24А после использования контейнера, как описано выше. Опционально элемент 24А может быть полностью снят с контейнера 20А.
Следует отметить, что на фиг. 17В и 17С закупоривающий элемент 24А присоединен к контейнеру 20А (например, путем сварки, адгезионного соединения или другим способом) с обеспечением уменьшения усилия стягивания. Например, участок, в котором начинают стягивание и который отмечен номером 41 позиции (фиг. 17В), имеет минимальный размер, например имеет вид точки, а линия 174 стягивания между закупоривающим элементом и контейнером расходится от точки 41 к остальной части периферии контейнера. (Передний край, за который нужно тянуть, ни в одном случае не является перпендикулярным направлению 57 стягивания, а всегда удерживается по меньшей мере под небольшим углом). Например, после точки 41 линия 174 может постепенно расширяться в соответствии с формой стрелки (пусть даже при небольшом угле, например 1°), либо, как показано на чертежах, линия соединения не является строго перпендикулярной направлению стягивания, а закруглена относительно указанного направления, так что стягивание выполняется постепенно для уменьшения тянущего усилия.
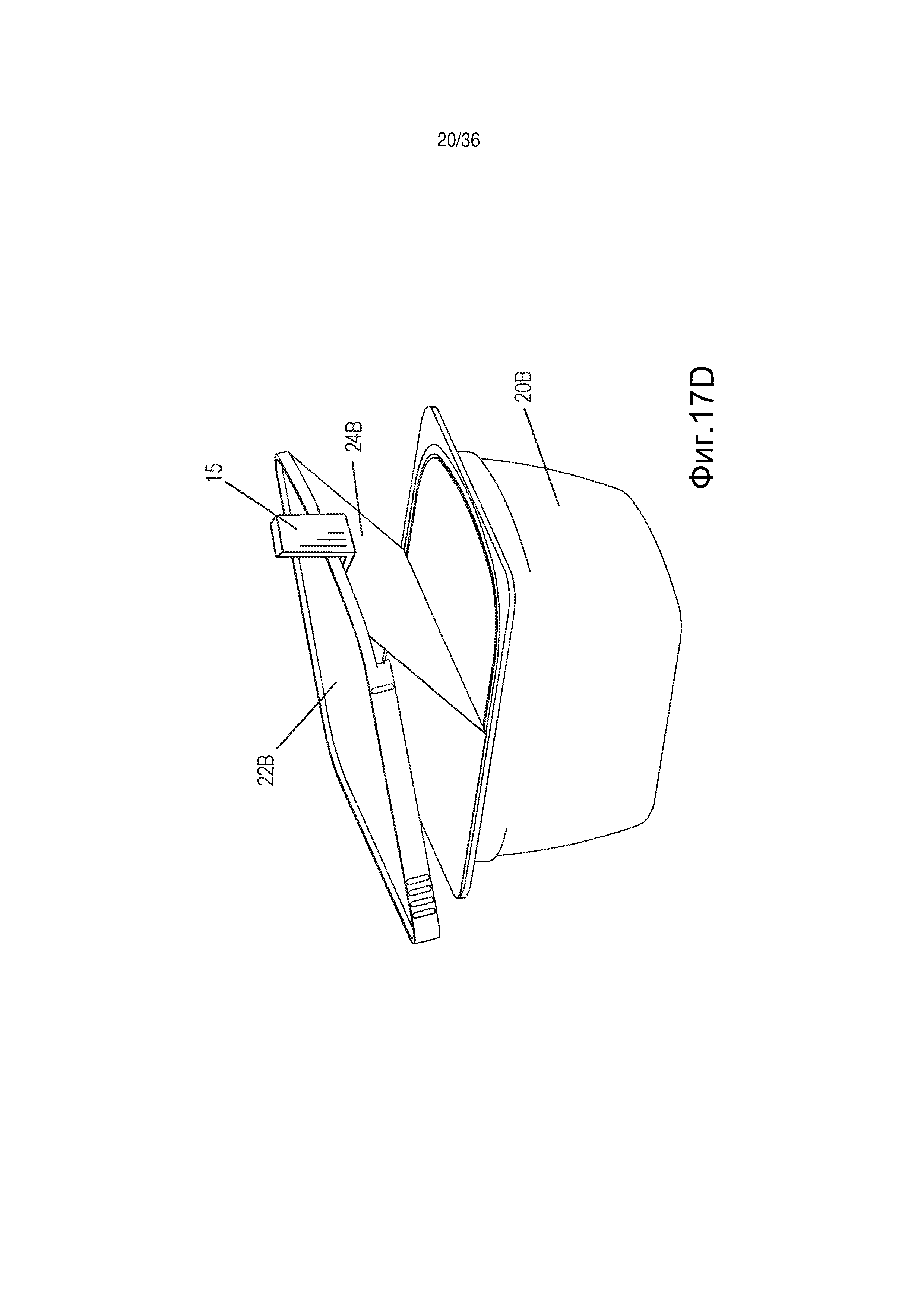
На фиг. 17D и 17Е изображен контейнер 20В с крышкой 22В, которая может быть поднята вверх при помощи открывающего механизма 15, соответственно в частично и полностью открытом положениях. Открывающий механизм захватывает и поднимает крышку 22В, когда контейнер проходит мимо указанного механизма. Закупоривающее средство 24В постепенно стягивается с контейнера 20В для открытия его съедобного содержимого. В дальнейшем средство 24В может быть снова присоединено к контейнеру 20В, как описано выше.
На фиг. 17F изображен кормовой контейнер 20С, не имеющий крышки и запечатанный только с помощью пленочного закупоривающего средства 24С, которое имеет жесткий передний край 170. Край 170 может примыкать к вышеописанному открывающему механизму для открывания контейнера. Закупоривающее средство 24С может быть вскрыто и снова присоединено к контейнеру 20С, как описано выше.
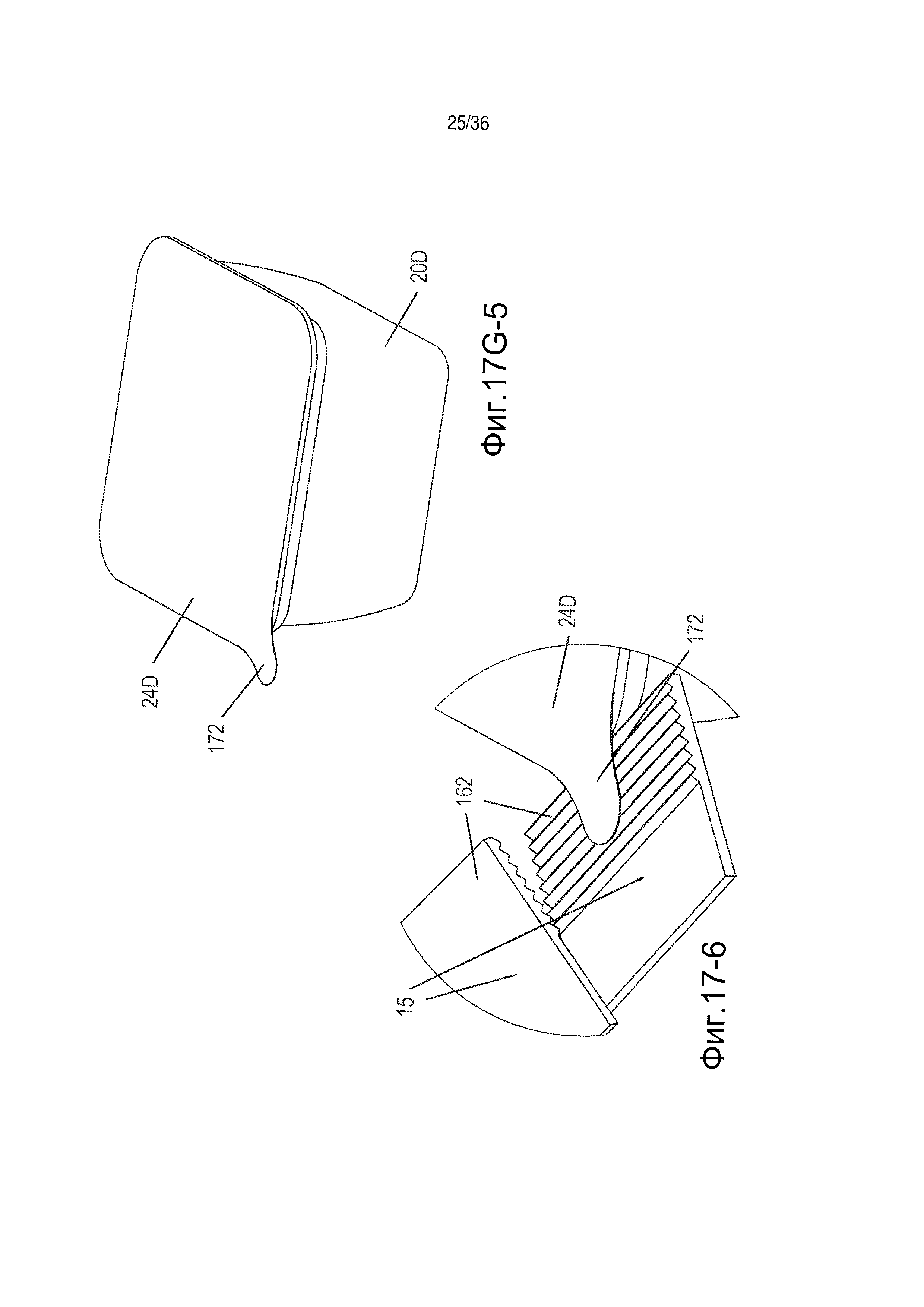
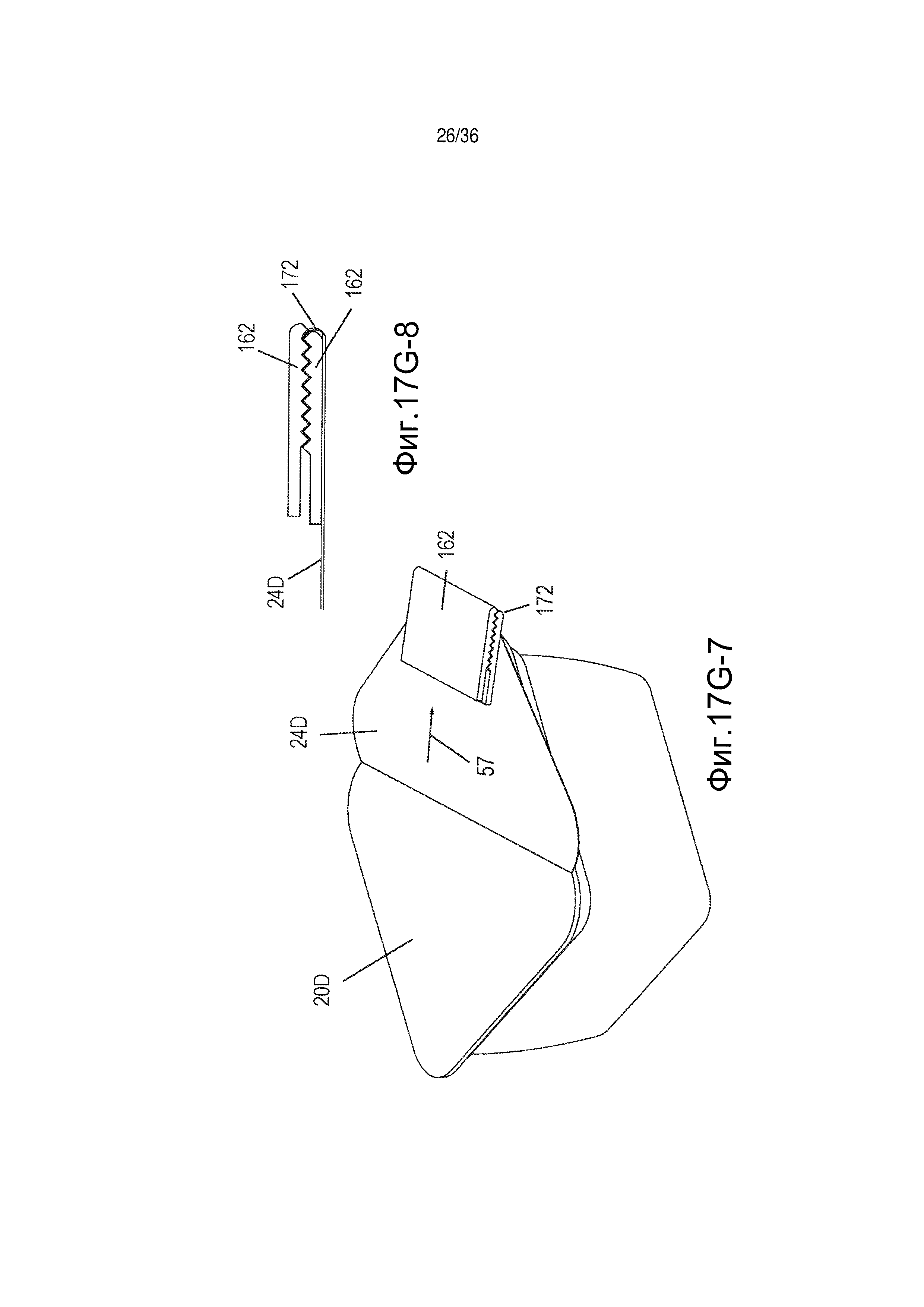
На фиг. 17G-1-17G-4 изображены различные кормовые контейнеры 20D, которые не имеют крышки и запечатаны только с помощью пленочного закупоривающего средства 24D и каждый из которых имеет захватный язычок 172, расположенный на переднем крае пленки 24D.
Изображенный на фиг. 17G-1 захватный язычок 172 может быть выполнен из более жесткого материала по сравнению с закупоривающим средством 24D (или может быть изготовлен из такого же материала и обладать такой же гибкостью). Открывающий механизм 15 может иметь паз 171, в который входит язычок 172 (или любой другой соответствующий элемент, предназначенный для захвата язычка 172), как вино из фиг. 17G-2. Когда контейнер проходит мимо механизма 15, язычок 172 постепенно отделяется от контейнера для открытия его съедобного содержимого.
В захватном язычке 172, изображенном на фиг. 17G-3 может быть выполнено окно, паз или отверстие 173 любого другого типа (указанные термины используются на протяжении всего описания взаимозаменяемым образом). Открывающий механизм 15 может содержать штифт 177 (или любой другой подходящий элемент для захвата отверстия 173), который соответствует отверстию 173 язычка 172, как видно из фиг. 17G-4. Когда контейнер проходит мимо механизма 15, язычок 172 постепенно отделяется от контейнера для открытия его съедобного содержимого.
На фиг. 17G-5 изображен кормовой контейнер 20D, который представляет собой в целом прямоугольный контейнер с пленочным закупоривающим средством 24D. Контейнер 20D может иметь другую форму, даже круглую. Данная конфигурация, с крышкой и без крышки, широко используется в кормовых контейнерах для домашних животных, представленных на рынке в настоящее время. Как видно из фиг. 17G-6, 17G-7 и 17G-8, контейнер 20D может быть передан к открывающему механизму 15 с расположением контейнера под углом относительно направления 57 стягивания (например под углом 45°), так что захватный язычок 172 закупоривающего средства 24D может быть захвачен зажимами 162 щипцов и стянут с контейнера 20D, так что усилие, необходимое для снятия закупоривающего средства, существенно уменьшено, как аналогично описано выше со ссылкой на фиг. 17В-17С. Зажимы 162 щипцов могут быть выполнены зазубренными или шероховатыми для увеличения силы трения и удерживающего усилия зажимов. Контейнер 20D (например кормовые контейнеры для домашних животных, представленные на рынке) может быть ориентирован в секции 14 хранения корма под углом (например под углом 45°), так что язычок 172 уже ориентирован надлежащим образом для обеспечения простого захвата и стягивания, как описано выше.
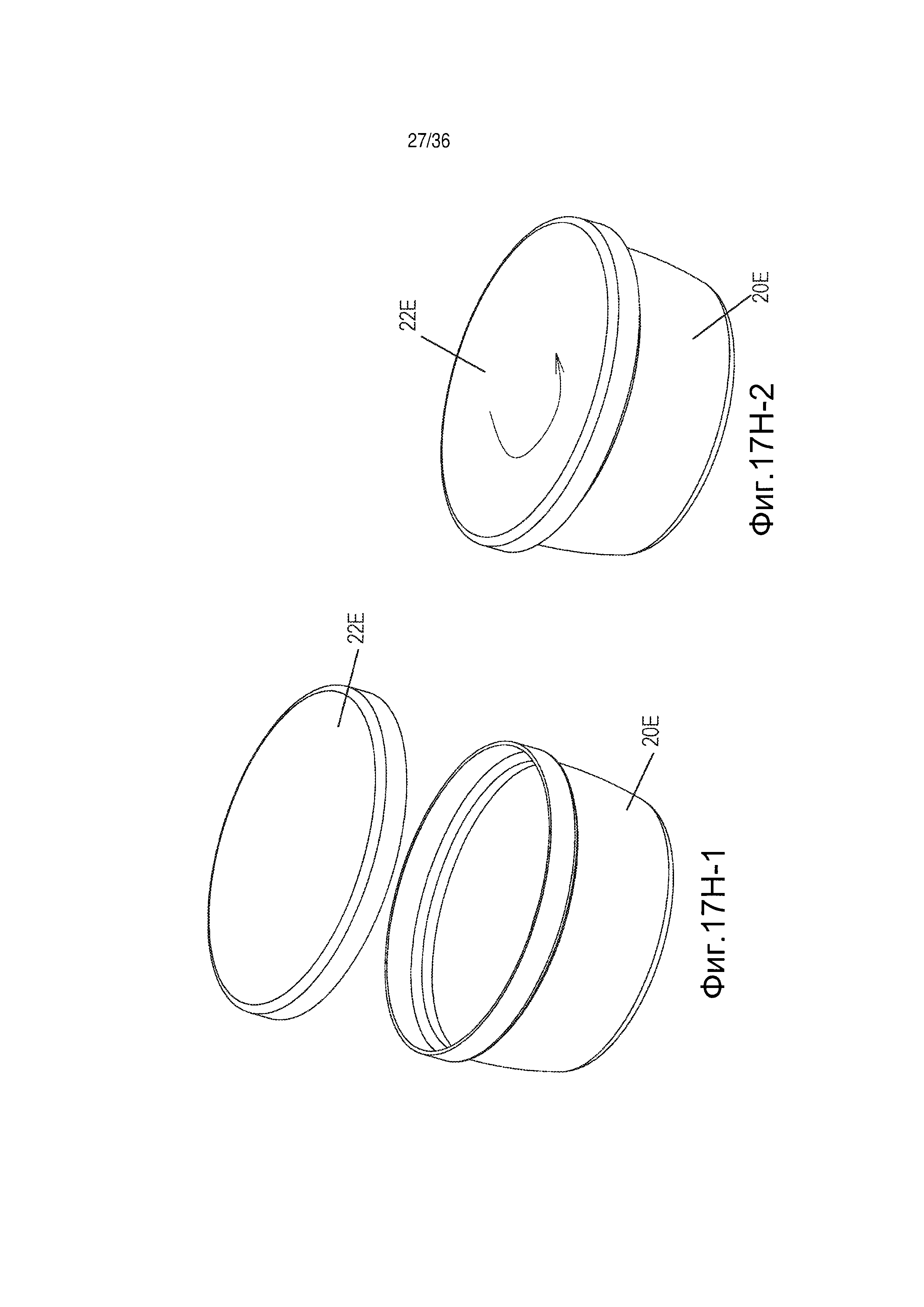
На фиг. 17Н-1 и 17Н-2 изображен кормовой контейнер 20Е, имеющий закругленную или круглую форму и выполненный с поворотной крышкой и/или покрывающим закупоривающим средством 22Е. В данном варианте выполнения открывающий механизм может захватывать крышку 22Е и поворачивать ее или откручивать от контейнера для открытия его съедобного содержимого. Контейнер 20Е может поставляться вместе с пленочным закупоривающим средством или без него. Если в контейнере предусмотрено пленочное закупоривающее средство, открывающий механизм обеспечивает его вскрытие, например, путем стягивания или отрывания или любым другим подходящим способом. Стягивание может быть выполнено одновременно с открыванием крышки или поэтапно, когда крышка открыта.
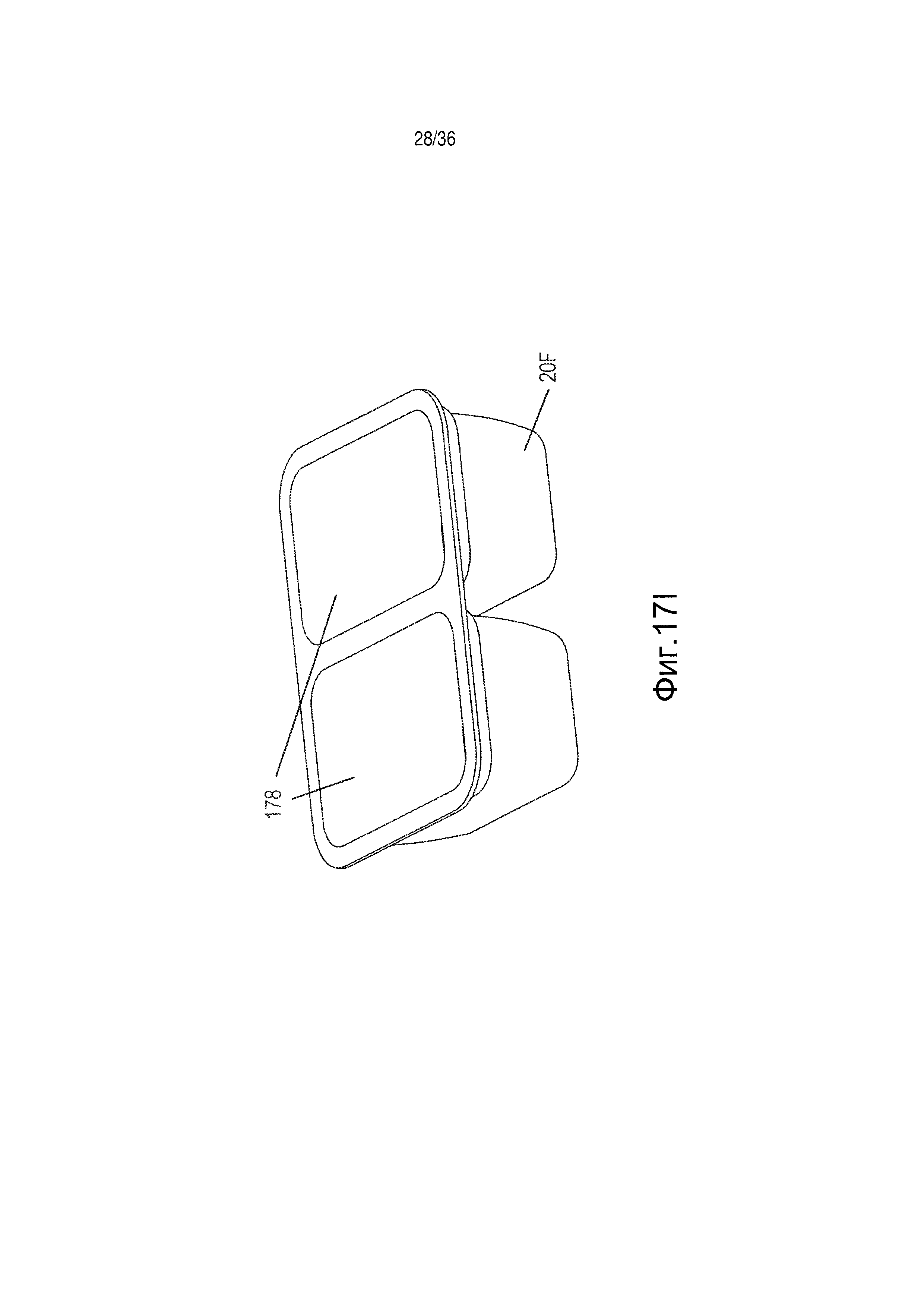
На фиг. 17I изображен кормовой контейнер 20F, имеющий несколько отделений (емкостей) 178 для корма, например, для размещения влажного и сухого корма в разных отделениях.
Во всех вариантах выполнения изобретения кормовой контейнер открывается при перемещении относительно открывающего механизма, например, когда контейнер перемещается относительно неподвижного открывающего механизма, или открывающий механизм перемещается относительно неподвижного контейнера, или в процессе открывания контейнера перемещаются и контейнер, и открывающий механизм.
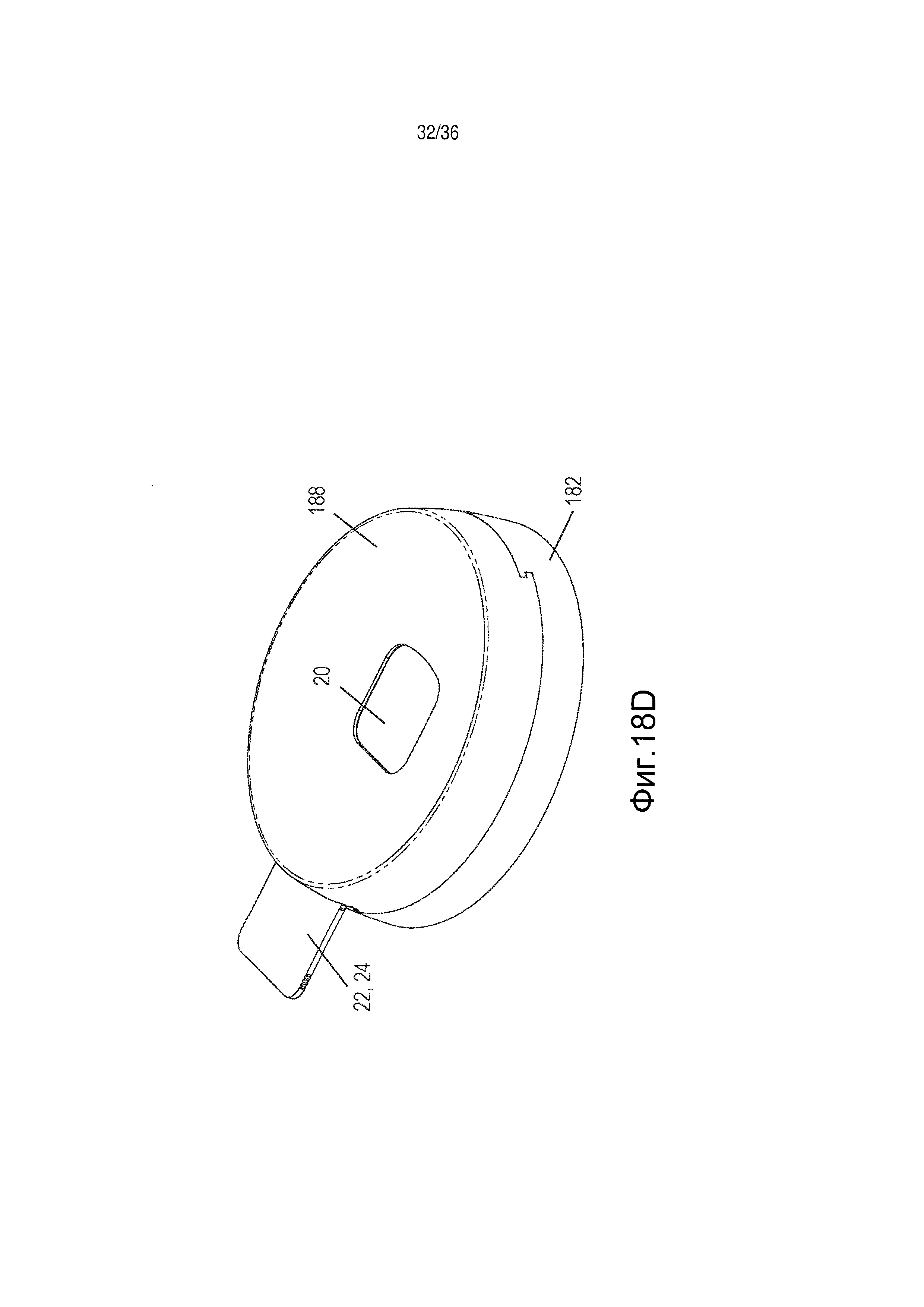
На фиг. 18А-18D изображена управляемая вручную система 180 для кормления животных, выполненная и работающая в соответствии с неограничивающим вариантом выполнения изобретения.
В варианте выполнения, изображенном на фиг. 18А, система 180 содержит нижнюю часть 182, которая имеет нижний канальный элемент 184 и нижнее отверстие (или проход, причем указанные термины используются взаимозаменяемым образом) 186, проходящее через канальный элемент 184 и нижнюю часть 182. Верхняя часть 188 имеет верхний канальный элемент 190, который при скольжении входит в сопряжение с нижним элементом 184. В изображенном варианте выполнения нижний элемент 184 является охватываемым, а верхний элемент 190 является охватывающим, как вариант, может иметь место обратная конфигурация. Через верхний канальный элемент 190 и верхнюю часть 188 проходит верхнее отверстие 192, выполненное с возможностью совмещения с нижним отверстием 186.
На фиг. 18В контейнер 20 с крышкой 22 и закупоривающим средством 24 расположен и удерживается в нижнем отверстии 186. Как видно из фиг. 18С-18D, верхняя часть 188 постепенно продвигается поверх нижней части 182, при этом верхний канальный элемент 190 скользит поверх нижнего канального элемента 184. При продвижении верхней части 188 поверх нижней части 182 передний край верхней части 188 или любой другой открывающий механизм упирается в передний край крышки 22 и/или закупоривающего средства 24 контейнера 20 и по меньшей мере частично снимает крышку 22 и/или средство 24 с контейнера 20, как описано выше. Таким образом, контейнер 20 и система 180 образуют полностью собранную кормушку, готовую для использования, как показано на фиг. 18D. После использования верхний элемент 190 может быть сдвинут поверх нижнего элемента 184 в противоположном направлении с возвращением в положение, показанное на фиг. 18В, при этом использованный контейнер 20 снова закрыт (для предотвращения выхода из него любых неприятных запахов и проникновения в него каких-либо насекомых или вредителей) и может быть легко снят и утилизирован.
Опционально вокруг нижнего ободка отверстия 186 или отверстия 192 может быть выполнено эластомерное уплотнение 194 (фиг. 18А), обеспечивающее непроницаемость между контейнером 20 и нижней частью 182.
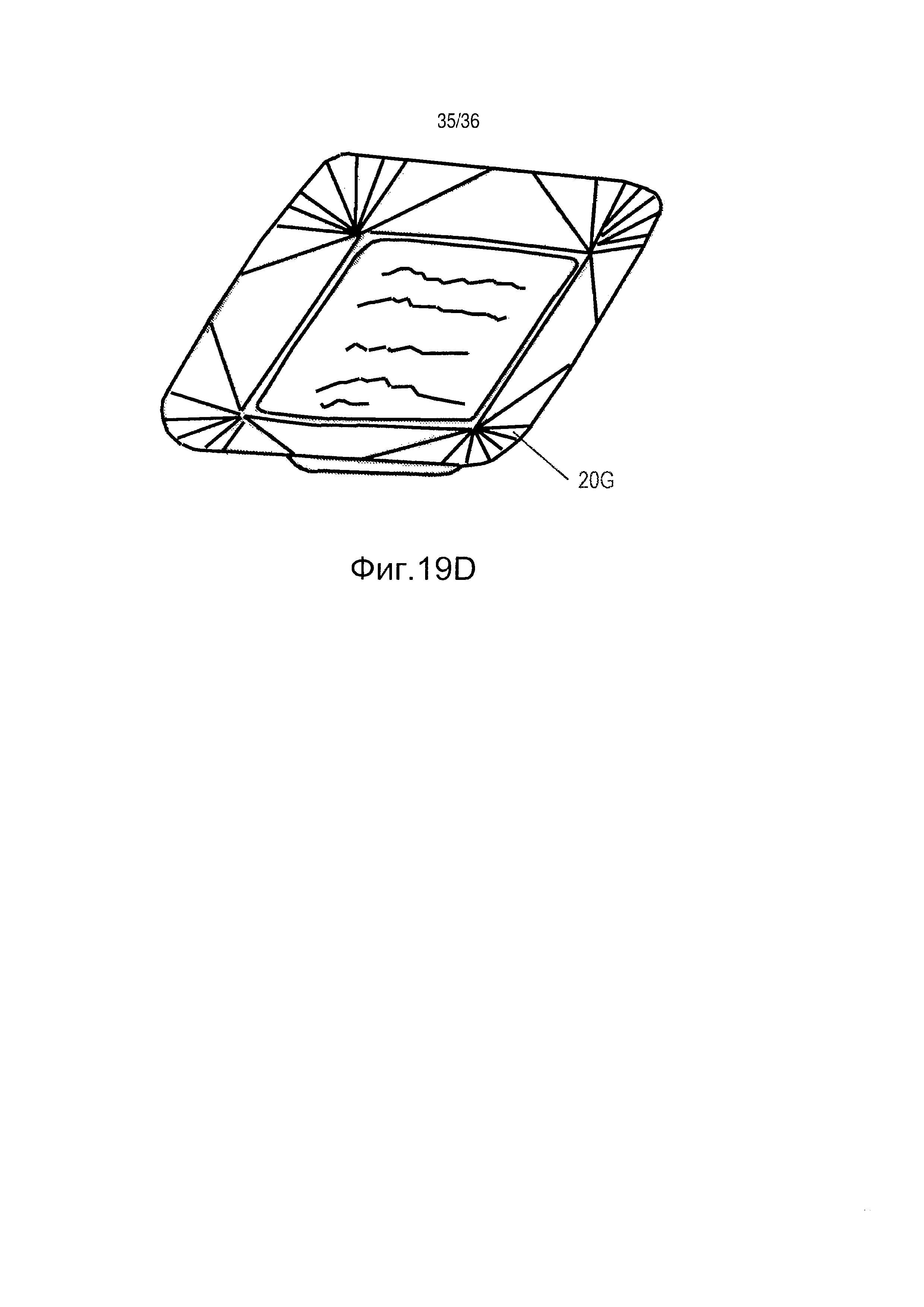
Как показано на фиг. 19А-19Е, контейнер 20 может быть превращен в чашу после его открывания. Следует отметить, что, в дополнение или как вариант, контейнер может изменять форму после открывания. Например, контейнер может быть сложен (например, по методу оригами) для экономии пространства и раскрыт в развернутую конфигурацию в виде раздаточной чаши. После раскладывания (разворачивания) ранее сложенное устройство раскрывается и расправляется с получением конфигурации, похожей на тарелку или чашу, например, с широким ободком, который способствует захвату корма без его разбрасывания.
Как видно из фиг. 19В, в одном примере сложенное устройство раскрывается наружу от верхней центральной точки. В другом примере, изображенном на фиг. 19Е, сложенное устройство раскрывается вверх от наружных сторон. После использования контейнер может быть снова свернут в компактную сложенную конфигурацию для экономии объема при вбрасывании в мусор.
Изображенный на фиг. 19С сложенный контейнер имеет загнутый внутрь ободок. Как показано на фиг. 19D, ободок распрямляется с обеспечением раскрывания контейнера так, что при подаче он имеет широкие ободки для предотвращения разбрасывания корма.
Изображенный на фиг. 19Е сложенный контейнер имеет загнутый наружу ободок (который распрямляется в направлении вверх). В варианте выполнения, изображенном на фиг. 19А-19Е, покрывающий закупоривающий элемент и/или крышка могут быть стянуты или удалены иным образом по отдельности.
Во всех вариантах выполнения контейнер может быть развернут и впоследствии сложен обратно в исходное положение. Как вариант, контейнер может быть выгнут наружу перед использованием, а затем (после использования) согнут внутрь, или наоборот, или же возможна любая комбинация вышеуказанного. Контейнер, находящийся в сложенной конфигурации, обеспечивает экономию пространства для хранения и транспортировки. При повторном складывании после использования сложенная конфигурация также обеспечивает гигиеничный способ утилизации контейнера без возникновения проблем, связанных с насекомыми и/или возбудителями инфекции.
При желании корм может быть раздроблен, разрублен, нарезан в форме кубиков или кусков после открывания и подачи контейнера. Это может быть выполнено с помощью механического элемента, расположенного внутри контейнера или его крышки/закупоривающего элемента, с помощью внешнего механизма, который может быть расположен в подающем узле или являться его частью, путем сдавливания или сжатия нижней части контейнера после его открывания и т.п. Например, крышка контейнера может быть выполнена с выступами (например с выступами ножевого типа или с режущим выступом любого другого вида), причем при соответствующем перемещении крышки (например, в процессе удаления крышки) режущие выступы обеспечивают разрезание, раскалывание корма, хранящегося в контейнере, или уменьшение его размера иным образом.
К опциональным особенностям относятся, без ограничения этим, беспроводная связь с подающим устройством (Wi-Fi, Bluetooth, NFS, сотовая связь, подключение к Интернету) или соединение с помощью проводной связи (например USB). Для регистрации присутствия домашнего животного и начала приема пищи может быть выполнен датчик обнаружения домашнего животного. Для определения количества корма, потребленного из контейнера, может быть выполнен датчик уровня (например оптический детектор, датчик радиочастотной идентификации или датчик веса для взвешивания корма). Датчик уровня может использоваться для определения количества корма, изначально предложенного животному, наряду с таймером, который фиксирует момент, когда корм был изначально предложен животному. В дальнейшем датчик уровня и таймер могут регистрировать уровень корма по истечении определенного количества времени. Данная информация может использоваться для определения предпочтений животного. Например, если животное (например, из семейства псовых) съедает большое количество корма за короткое время, это может свидетельствовать о том, что ему нравится данный корм (возможно, с учетом других факторов, например, с определением того, насколько голодным было животное перед едой). Датчик уровня может обнаружить, что животное не оставило после еды никаких кусочков и крошек или что их осталось очень мало (признак того, что животное вылизало раздаточный контейнер). И наоборот, если животное съело небольшое количество корма за длительный период времени, это может свидетельствовать о том, что корм животному не нравится. Система может составить рейтинг пищевых предпочтений на основании статистической оценки поведения животного за некоторый период времени.
Таким образом, в целом датчики могут быть предусмотрены для выяснения предпочтений животного, чтобы определить, какие корма ему нравятся больше, а какие меньше. Датчик может регистрировать время, затрачиваемое животным на еду, и энтузиазм при приеме корма. Это может быть использовано для получения показателя пищевых пристрастий/рейтинга, причем указанные данные могут храниться и анализироваться/обрабатываться на месте или дистанционно (например, с помощью сервера, работающего через Интернет) для определения пищевых предпочтений животного и предоставления информации его хозяину для будущих закупок корма. Пищевые предпочтения животного могут быть определены исходя из комбинации времени подхода к корму, времени приема пищи, уровня окончания/завершения/подчистки (например вылизывания миски).
Могут быть предусмотрены датчики для уведомления об опасности при кормлении животного. Например, датчики могут регистрировать необычное поведение при приеме пищи (например снижение/отсутствие аппетита/наличие недомоганий и т.д.), а также могут предоставлять статистические данные о кормлении животного. Статистическая информация важна для составления рейтинга кормов по типу/вкусу. Например, система обрабатывает статистическую информацию, а также общие и частные модели поведения животного, зарегистрированные датчиками, и «усваивает», вычисляет и хранит в памяти рейтинги и информацию о «пищевых пристрастиях». «Пищевые пристрастия» могут быть определены с помощью алгоритма, который учитывает различные факторы и параметры, такие как, но без ограничения этим, время, затрачиваемое животным на подход к корму (чем быстрее животное подходит к корму, тем больше ему нравится корм), время, затрачиваемое на поедание корма (чем быстрее животное ест, тем больше ему нравится корм), количество оставшегося в контейнере корма при его наличии (чем меньше остается корма, тем больше животному нравится корм). Датчики регистрации/отслеживания подхода животного к корму и/или к подающему устройству и/или датчики, регистрирующие уровень корма, оставшегося в контейнере, могут предоставлять необходимые параметры/статистические данные для оценки таких «пищевых пристрастий».
Система 10 для кормления животных может содержать несколько подающих устройств для кормления более чем одного домашнего животного. Время кормления может быть синхронизировано в соответствии с любым планом кормления. Для синхронизации отдельных подающих устройств в пределах одного и того же домашнего хозяйства при обслуживании нескольких домашних животных может использоваться опция синхронизации.
Система 10 для кормления животных может подавать голосовые сообщения о времени кормления (например, в том числе голосом хозяина; может иметься опция записи речи).
Система 10 для кормления животных может содержать датчики для индивидуализации кормушки. Например, датчики могут определять, какое животное подошло к подающему устройству (например, датчик может идентифицировать радиочастотный чип на животном) и обслуживать только конкретное животное. Раздаточный механизм не будет работать и может убрать поданный контейнер, если животное не авторизовано, с предотвращением тем самым кормления бездомных животных и гарантией того, что все домашние животные будут накормлены и самое сильное животное не отберет корм у других животных.
Система 10 для кормления животных может иметь модульную конструкцию с легко снимаемыми крышкой и элементами для простой очистки зоны кормления животных (наружных частей подающего устройства, к которым животное имеет доступ).
В соответствии с другим вариантом выполнения изобретения система может использоваться для инвентаризации и закупки корма для животных. Для этого в системе используются различные датчики, упомянутые выше (например датчик уровня корма, датчики типа корма, таймеры и другие датчики определения пищевых предпочтений), совместно с системой управления, которая связана с местным или удаленным центром логистики/исполнения заказов (с помощью беспроводного и/или Интернет-соединения). Например, система может определять необходимый запас корма по типу и вкусу (например, заданным пользователем). Система распознает тип или вкус подаваемых капсул с кормом (например, зарегистрированных подающим устройством). Система обрабатывает полученную от датчиков информацию и автоматически вычисляет текущий уровень товарного запаса пользователя (это может быть осуществлено, например, при помощи приложения на домашнем компьютере/смартфоне пользователя или непосредственно при помощи подающего устройства). Затем система рассчитывает требуемое количество корма, необходимое для восстановления кормового запаса, и автоматически размещает заказы на нужный корм. Заказчик может получить уведомление (на смартфон или компьютер) и подтвердить любой конкретный заказ. Как вариант, процесс может быть полностью автоматизирован и происходить с отправкой уведомлений или без нее.
Реферат
Группа изобретений относится к кормушкам для животных. Размещают закрытый кормовой контейнер в системе для кормления животных. Открывают кормовой контейнер с помощью подъема или захвата элемента для удерживания, содержащего кончик, пленку или крышку. Подают корм животному для кормления. Закрывают кормовой контейнер с помощью кончика, пленки или крышки на контейнере. Система для кормления животных содержит открывающий механизм, закрывающий механизм и транспортер для перемещения кормового контейнера к секции кормления. Устраняется неприятный запах и исключается проникновение в использованный контейнер насекомых и вредителей. 2 н. и 12 з.п. ф-лы, 19 ил.
Формула
Документы, цитированные в отчёте о поиске
Автокормушка для выдачи порошкообразного корма мелким лабораторным животным, содержащимся в клетке
Комментарии