Устройство управления положением задних ног животного, оборудованное им доильное стойло и вращающийся доильный зал - RU2736731C1
Код документа: RU2736731C1
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления положением задних ног животного, содержащему корпус, имеющий нижнюю сторону, которая выполнена с возможностью опоры в рабочем положении на пол доильного стойла, первую боковую сторону и вторую боковую сторону, которая находится напротив первой боковой стороны, и передний конец и заднюю сторону, которая находится напротив переднего конца, при этом продольное направление корпуса определяется линией, проходящей от переднего конца к задней стороне, при этом первая переходная область, где первая боковая сторона поворачивается в заднюю сторону, образует первый задний угол указанного корпуса, а вторая переходная область, где вторая боковая сторона поворачивается в заднюю сторону, образует второй задний угол указанного корпуса, при этом передний конец выполнен с возможностью поворота в направлении передней части доильного стойла, когда указанный корпус находится в рабочем положении в доильном стойле, а задняя сторона выполнена с возможностью поворота в направлении задней части доильного стойла, когда указанный корпус находится в рабочем положении в доильном стойле.
Изобретение также относится к доильному стойлу, содержащему переднюю часть, заднюю часть, доильное устройство, расположенное в области задней части, пол, который в задней части доильного стойла имеет задний край, при этом задний край проходит вдоль линии, которая имеет угол в диапазоне 5°–45° относительно линии, перпендикулярной относительно продольного направления доильного стойла, и при этом доильное стойло выполнено с возможностью размещения животного так, чтобы во время доения животного оно стояло повернутым головой в направлении передней части доильного стойла посредством указанного доильного устройства и с задними ногами в задней части доильного стойла.
Изобретение также относится к вращающемуся доильному залу, содержащему вращающуюся платформу, на которой расположено множество доильных стойл, причем каждое стойло имеет продольное направление, которое имеет угол 5°–45° относительно радиуса, проходящего от оси вращения вращающейся платформы.
Предшествующий уровень техники
Доильные стойла для доения коров можно оборудовать устройством, которое заставляет корову стоять с заданным минимальным расстоянием между ее задними ногами, обеспечивая за счет этого облегченное прикрепление доильного устройства к вымени коровы. Прикрепление можно выполнять либо вручную, либо автоматически посредством робота. В отсутствие такого устройства управления положением задних ног, корова может стоять так, что ее задние ноги будут находиться близко друг к другу, препятствуя за счет этого прикреплению доильного устройства. Устройство управления положением задних ног может содержать корпус, который имеет высоту по меньшей мере 5 см, ширину по меньшей мере 20 см и длину по меньшей мере 25 см. Оно может иметь неровную верхнюю поверхность, чтобы корове было неудобно стоять на ней. Устройство управления положением задних ног можно сделать металлическим или полимерным. Обычно оно имеет симметричную форму и имеет ось симметрии, которая совмещена с продольной центральной линией доильного стойла. Другими словами, продольная центральная линия корпуса устройства управления положением ног может совпадать с продольной центральной линией доильного стойла.
На так называемых вращающихся доильных залах множество доильных стойл расположено на круглой и вращающейся платформе. Каждое стойло имеет продольное направление, которое имеет угол относительно радиуса, проходящего от оси вращения платформы к рассматриваемому стойлу. Задний край пола каждого стойла будет таким образом иметь соответствующий угол относительно линии, перпендикулярной продольному направлению этого доильного стойла. Когда устройства управления положением задних ног предшествующего уровня техники расположены в задней части такого наклонного доильного стойла (стойло имеет форму параллелограмма) с продольной центральной линией, совпадающей с продольной центральной линией доильного стойла, расстояние между задней стороной устройства управления положением задних ног и задним краем пола доильного стойла на одном конце указанной задней стороны будет отличаться от ее другого конца. В результате этого корова может стоять одним из своих копыт позади корпуса устройства управления положением задних ног вместо того, чтобы стоять этим копытом рядом с корпусом устройства управления положением задних ног. За счет этого, расстояние между задними ногами коровы может быть слишком коротким для надлежащего и точного прикрепления доильного устройства к вымени коровы.
Цель изобретения состоит в том, чтобы представить альтернативное устройство управления положением задних ног животного, которое устраняет упомянутый выше недостаток устройств управления положением задних ног животного предшествующего уровня техники.
Сущность изобретения
Цель изобретения достигнута посредством устройства управления положением задних ног животного согласно определению вначале, отличающегося тем, что первый задний угол и второй задний угол расположены в разных продольных положениях в продольном направлении корпуса. За счет этого устройство управления положением задних ног животного можно расположить в наклонном стойле, как описано выше, с продольной центральной линией, параллельной продольной центральной линии доильного стойла, а расстояние между первым и вторым задними углами корпуса устройства управления положением задних ног животного и задним краем пола доильного стойла может быть одинаковым, что было бы почти невозможно, если бы первый и второй задние углы имели бы одинаковое продольное положение в продольном направлении корпуса устройства управления положением задних ног животного, а последний имеет продольное направление, параллельное продольному направлению стойла. За счет этого можно предотвратить нежелательное расположение одного из копыт коровы позади устройства управления положением задних ног животного. Согласно одному варианту осуществления разница в положении между первым задним углом и вторым задним углом в продольном направлении корпуса составляет по меньшей мере 1 см. Согласно другому варианту осуществления разница составляет по меньшей мере 5 см.
Должно быть понятно, что первая боковая сторона и вторая боковая сторона представляют собой наружные поверхности корпуса указанного устройства, и что общая ширина указанного корпуса в направлении поперек продольного направления корпуса определяется расстоянием между первой боковой стороной и второй боковой стороной.
Согласно одному варианту осуществления прямолинейная линия, которая проходит из первого заднего угла во второй задний угол, имеет угол α в диапазоне 5°–45° относительно линии, перпендикулярной продольному направлению указанного корпуса. Угол выбирают с учетом угла между задним краем пола доильного стойла и линией, перпендикулярной продольной центральной линии доильного стойла. Задняя сторона указанного корпуса может быть прямолинейной, или может иметься изгиб. Согласно одному варианту осуществления задняя сторона является вогнутой.
Согласно одному варианту осуществления прямолинейная линия, которая проходит из первого заднего угла во второй задний угол, имеет угол α в диапазоне 20°–45° относительно линии, перпендикулярной продольному направлению указанного корпуса.
Согласно одному варианту осуществления первая боковая сторона параллельна второй боковой стороне. За счет этого ширина указанного корпуса одинаковая по всей длине корпуса.
Согласно одному варианту осуществления общая форма указанного корпуса, если смотреть сверху, имеет форму параллелограмма. Термин «общая» используют, чтобы подчеркнуть, что могут быть небольшие отклонения от абсолютного параллелизма между противоположными сторонами. Например, передний конец и задняя сторона могут немного отклоняться от абсолютного параллелизма, тогда как общая форма указанного корпуса все–таки имеет форму параллелограмма. Согласно одному варианту осуществления указанный корпус имеет общую форму параллелограмма, при этом и передний конец и задняя сторона являются вогнутыми.
Согласно одному варианту осуществления первая и вторая боковые стороны имеют разную длину, а общая форма указанного корпуса, если смотреть сверху, имеют форму равнобедренной трапеции. Как и описанная ранее форма параллелограмма эта форма также может немного отклоняться от абсолютного параллелизма между противоположными сторонами, и все же соответствовать в то же время определению равнобедренной трапеции. Согласно одному варианту осуществления указанный корпус имеет общую форму равнобедренной трапеции, у которой и передний конец и задняя сторона являются вогнутыми.
Согласно одному варианту осуществления линия, которая образует продольное направление корпуса, является центральной линией, проходящей между первой и второй боковыми сторонами от средней точки переднего конца до средней точки задней стороны. Средней точкой называют середину между первой боковой стороной и второй боковой стороной на любом заданном продольном уровне в продольном направлении корпуса.
Согласно одному варианту осуществления устройство управления положением задних ног животного содержит два или более отдельных вспомогательных корпуса, которые вместе образуют указанный корпус. Например, корпус может содержать два прямоугольных вспомогательных корпуса, расположенных бок–о–бок. Эти вспомогательные корпуса могут иметь одинаковую длину и быть смещены в продольном направлении друг относительно друга, так чтобы получить корпус согласно принципам изобретения, которые описаны выше. В качестве альтернативы эти вспомогательные корпуса могут иметь разную длину, так чтобы получить корпус согласно принципам изобретения, которые описаны выше. Корпуса разной длины, конечно, также можно выполнить с возможностью смещения в продольном направлении друг относительно друга. За счет этого угол между прямолинейной линией, которая проходит из первого заднего угла во второй задний угол, составляет угол α относительно линии, перпендикулярной продольному направлению указанного корпуса, который можно изменять в зависимости от наклона доильного стойла. Множество других комбинаций вспомогательных корпусов попадают под объем защиты настоящего изобретения.
Согласно одному варианту осуществления корпус содержит два вспомогательных корпуса, при этом первый вспомогательный корпус имеет первый и второй задние углы, которые расположены в одинаковых продольных положениях в продольном направлении корпуса, и второй вспомогательный корпус, который имеет клиновидную форму, если смотреть сверху, и который выполнен с возможностью расположения вдоль задней стороны первого вспомогательного корпуса.
Согласно одному варианту осуществления корпус имеет максимальную высоту по меньшей мере 5 см. Должно быть понятно, что указанный корпус имеет конструкцию, из–за которой животному, предпочтительно корове, неудобно стоять копытами на указанном корпусе. Верхняя поверхность корпуса может быть плоской. Однако, согласно одному варианту осуществления верхняя поверхность имеет изгиб. Согласно одному варианту осуществления указанный корпус имеет точку вершины в центральной зоне корпуса, при этом верхняя поверхность наклонена от этой точки вершины в направлении переднего конца, задней стороны и первой и второй боковых сторон. Наклон наклонной поверхности препятствует расположению копыт на указанном корпусе, поскольку стоя на такой наклонной поверхности животные будут чувствовать себя неудобно. В качестве альтернативы верхняя поверхность, содержащая неровности, вызванные углублениями в ней и/или выступами на ней, также будет эффективной для достижения эффекта неудобства при стоянии на ней.
Согласно одному варианту осуществления расстояние между первой боковой стороной и второй боковой стороной в первой и второй переходных областях составляет по меньшей мере 20 см.
Согласно одному варианту осуществления длина корпуса, если смотреть вдоль продольного направления от средней точки задней стороны до средней точки переднего конца, составляет по меньшей мере 25 см. Согласно дополнительному варианту осуществления указанная длина корпуса составляет по меньшей мере 40 см или по меньшей мере 50 см.
Цель изобретения также достигнута с помощью доильного стойла, содержащего переднюю часть, заднюю часть, доильное устройство, расположенное в области задней части, пол, который в задней части доильного стойла имеет задний край, при этом задний край проходит вдоль линии, которая имеет угол в диапазоне 5°–45° относительно линии, перпендикулярной относительно продольного направления доильного стойла, и при этом доильное стойло выполнено с возможностью размещения животного так, чтобы во время доения животного оно стояло повернутым головой в направлении передней части доильного стойла посредством указанного доильного устройства и с задними ногами в задней части доильного стойла, причем указанное доильное стойло отличается тем, что оно содержит устройство управления положением задних ног животного согласно определению выше или дальше, расположенное в задней части доильного стойла, причем его задняя сторона повернута в направлении заднего края пола доильного стойла. Согласно одному варианту осуществления продольная центральная линия устройства управления положением задних ног животного параллельна продольной центральной линии доильного стойла, и согласно одному варианту осуществления продольная центральная линия устройства управления положением задних ног животного совпадает с продольной центральной линией доильного стойла. Задний край может быть образован краем пола, при этом имеется ступень между полом и окружающей землей, причем пол оканчивается указанным краем. Альтернативно, край пола образован таким элементом, как брус и тому подобное, который проходит на уровне или немного выше пола и образует имитирующий край, который образует задний предел или границу стойла.
Согласно одному варианту осуществления прямолинейная линия, проходящая из первого заднего угла во второй задний угол устройства управления положением задних ног животного, имеет угол не более чем 10° с задним краем пола доильного стойла. Если задний край пола имеет изгиб, угол α измеряют между указанной прямолинейной линией и линией, имеющей направление края пола, причем последнюю пересекает продольная центральная линия доильного стойла.
Согласно одному варианту осуществления прямолинейная линия, проходящая из первого заднего угла во второй задний угол устройства управления положением задних ног животного, в общем параллельна заднему краю пола доильного стойла. Если задний край пола имеет изгиб, указанная прямолинейная линия параллельна касательной края пола, причем последнюю пересекает продольная центральная линия доильного стойла.
Согласно одному варианту осуществления расстояние между задней стороной устройства управления положением задних ног животного и задним краем пола доильного стойла находится в диапазоне 5–15 см. Предпочтительно максимальное расстояние между любым из первого и второго задних углов указанного корпуса и задним краем пола меньше чем 10 см. Предпочтительно расстояние между первым задним углом указанного корпуса и задним краем указанного пола и расстояние между вторым задним углом указанного корпуса и задним краем пола отличается не более чем на 5 см, предпочтительно не более чем на 1 см. Расстояние может отличаться по длине задней стороны указанного корпуса из–за того, что прямолинейная линия из первого заднего угла во второй задний угол имеет иное направление, чем задний край, или что задний край имеет изгиб или неровность, или что задняя сторона имеет изгиб или неровность, или из–за комбинации этого.
Согласно одному варианту осуществления продольное направление устройства управления положением задних ног животного параллельно продольному направлению доильного стойла.
Согласно одному варианту осуществления продольное направление устройства управления положением задних ног животного параллельно продольному направлению доильного стойла.
Согласно одному варианту осуществления доильным стойлом является доильное стойло, расположенное на вращающемся доильном зале.
Цель изобретения также достигнута посредством вращающегося доильного зала, содержащего вращающуюся платформу, на которой расположено множество доильных стойл, причем каждое стойло имеет продольное направление, которое имеет угол 5°–45° относительно радиуса, проходящего от оси вращения вращающейся платформы, причем указанный вращающийся доильный зал отличается тем, что доильными стойлами, расположенными на вращающейся платформе, являются доильные стойла согласно настоящему изобретению согласно определению в этом раскрытии выше или дальше. Радиусом является радиус, который пересекает центральную линию доильного стойла на переднем конце доильного стойла.
Дополнительные признаки и преимущества настоящего изобретения будут представлены в следующем подробном описании вариантов осуществления.
Краткое описание чертежей
Далее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, на которых:
На фиг. 1 представлен вид в перспективе первого варианта осуществления устройства управления положением задних ног животного согласно настоящему изобретению,
На фиг. 2 представлено поперечное сечение согласно II–II на фиг. 1,
На фиг. 3 представлен вид сверху устройства, показанного на фиг. 1,
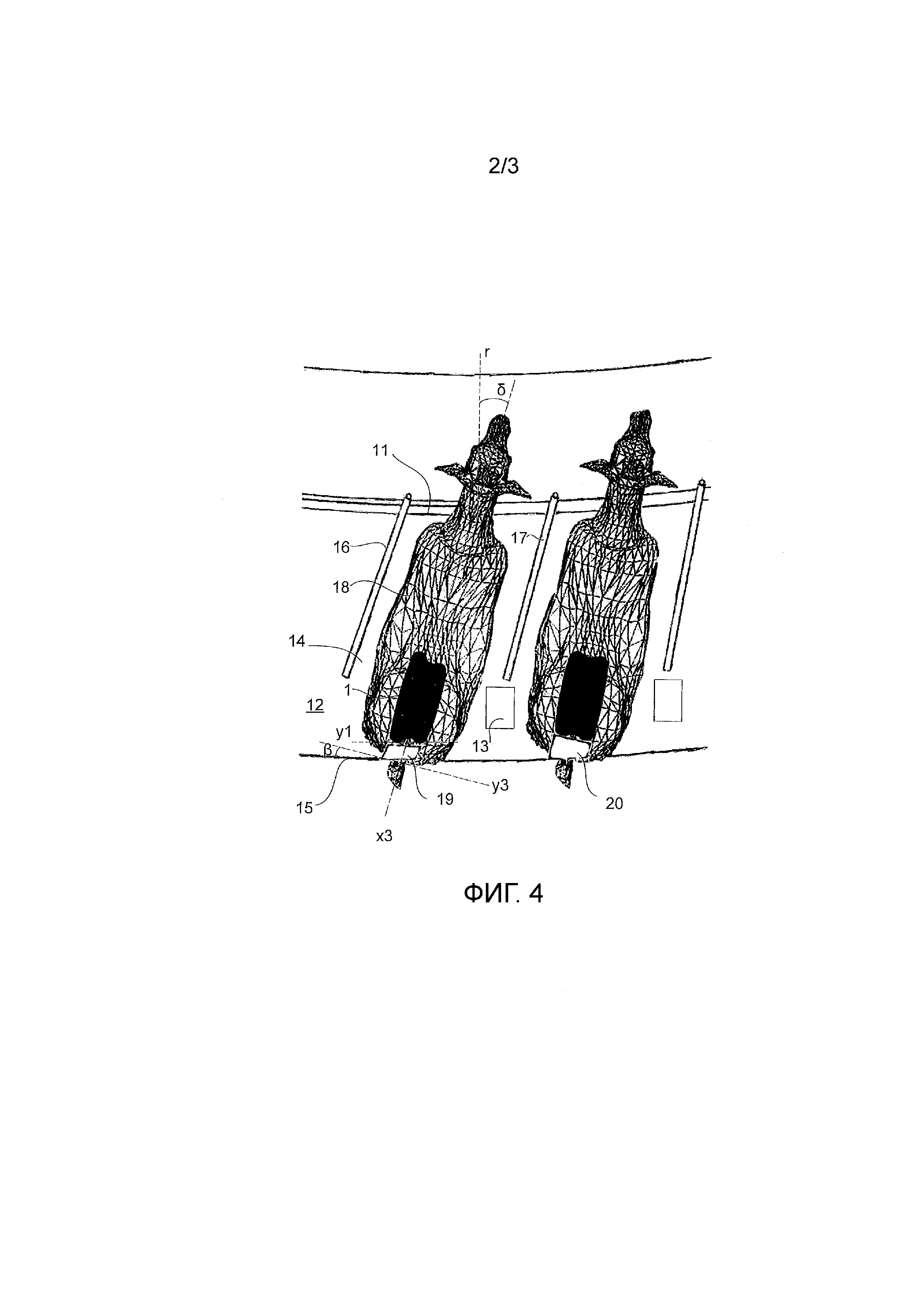
На фиг. 4 представлен вид в перспективе сверху двух доильных стойл, оборудованных устройством управления положением задних ног животного согласно изобретению и устройством управления положением задних ног животного согласно предшествующему уровню техники, соответственно,
На фиг. 5 представлен вид сверху второго варианта осуществления устройства управления положением задних ног животного согласно настоящему изобретению, а
На фиг.6 представлен вид сверху третьего варианта осуществления устройства управления положением задних ног животного согласно настоящему изобретению.
Подробное описание изобретения
На фиг. 1–3 показан первый вариант осуществления устройства управления положением задних ног животного согласно настоящему изобретению. Устройство управления положением задних ног животного содержит корпус 1, который имеет нижнюю сторону 2, которая выполнена с возможностью опоры в рабочем положении на пол доильного стойла. Кроме того, указанный корпус 1 имеет первую боковую сторону 3 и вторую боковую сторону 4, которая находится напротив первой боковой стороны 3. Указанный корпус 1 также имеет передний конец 5 и заднюю сторону 6, которая находится напротив переднего конца 5, при этом продольное направление корпуса определяется линией x, проходящей от переднего конца 5 к задней стороне 6. Корпус 1 также имеет первую переходную область, где первая боковая сторона 3 переходит в заднюю сторону 6 и образует первый задний угол 7 указанного корпуса, и вторую переходную область, где вторая боковая сторона 4 переходит в заднюю сторону 6 и образует второй задний угол 8 указанного корпуса 1.
Как можно видеть в частности на фиг. 3, первый задний угол 7 и второй задний угол 8 расположены в разных продольных положениях в продольном направлении корпуса 1. На фиг.3 это проиллюстрировано прямолинейной линией y1, проходящей из первого заднего угла 7 во второй задний угол 8, и линией y2, перпендикулярной продольному направлению корпуса 1. Линия x, которая образует продольное направление, является центральной линией корпуса 1, проходящей между первой и второй боковыми сторонами 3, 4 от средней точки переднего конца 5 до средней точки задней стороны 6. В показанном варианте осуществления прямолинейная линия y1, которая проходит из первого заднего угла во второй задний угол, имеет угол α приблизительно 20° относительно линии y2, перпендикулярной продольному направлению указанного корпуса 1.
Первая и вторая боковые стороны 3, 4 являются параллельными и имеют разную длину, а общей формой указанного корпуса 1, если смотреть сверху, является форма равнобедренной трапеции. Задняя сторона 6 является вогнутой между первым задним углом 7 и вторым задним углом 8. Альтернативно она может быть прямолинейной. Первый и второй задние углы 7, 8 имеют округлую форму с радиусом изгиба по меньшей мере 3 см.
Корпус 1 имеет максимальную высоту, которая составляет более чем 5 см. В этом конкретном варианте осуществления максимальная высота составляет 6,5 см. Как можно увидеть на фиг. 2, корпус 1 имеет верхнюю поверхность 9, которая наклонена от точки вершины, где корпус 1 имеет максимальную высоту в направлении первой боковой стороны 3 и в направлении второй боковой стороны 4. Точка вершины находится выше центральной линии x корпуса 1.
Корпус 1 сделан из подходящего материала, такого как нержавеющая сталь, твердая резина или полимер. Его можно прикрепить к полу доильного стойла посредством болтов, которые ввинчивают через корпус 1 в пол. Вследствие этого, в корпусе 1 также предоставлены отверстия 10, проходящие от верхней поверхности 9 до нижней поверхности 2, и предназначенные для приема таких болтов.
На фиг. 4 показаны два доильных стойла, оборудованных устройством управления положением задних ног животного согласно изобретению (слева) и устройством управления положением задних ног животного согласно предшествующему уровню техники (справа), соответственно. Кроме разных устройств управления положением задних ног два доильных стойла являются идентичными. Доильное стойло согласно изобретению содержит переднюю часть 11, заднюю часть 12, доильное устройство 13, расположенное в области задней части 12. Доильное стойло также содержит пол 14, который в задней части 12 доильного стойла имеет задний край 15. Задний край 15 имеет изгиб. В точке, где задний край 15 пересекает центральная линия x3 доильного стойла, касательная заднего края 15 имеет угол β приблизительно 20° относительно линии y3, перпендикулярной относительно продольного направления x3 доильного стойла. Продольное направление x3 доильного стойла определяется линией x3, проходящей параллельно и посередине между двумя параллельными боковыми стенками 16, 17, которые определяют ширину доильного стойла. Боковые стенки 16, 17 образованы металлическими прутьями.
Доильное стойло выполнено с возможностью размещения животного 18, в этом случае коровы, стоящего повернутым головой в направлении передней части 11 доильного стойла во время доения животного 18 посредством доильного устройства 13, и с задними ногами в задней части 12 доильного стойла.
С целью предотвращения того, чтобы животное 18 стояло со слишком коротким расстоянием между его задними ногами, что затруднило бы прикрепление соответствующей части доильного устройства 13 к вымени животного 18, доильное стойло содержит устройство управления положением задних ног животного согласно настоящему изобретению, расположенное в задней части 12 доильного стойла. Устройство управления положением задних ног животного, показанное на фиг. 4, представляет собой тот же вариант осуществления, который показан на фиг. 1–3. Задняя сторона 6 корпуса 1 устройства управления положением задних ног животного повернута в направлении заднего края 15 пола 14 доильного стойла.
Центральная линия x, которая образует продольное направление корпуса 1, совпадает с центральной линией x3 доильного стойла, которая образует продольное направление доильного стойла. Прямолинейная линия y1, которая проходит из первого заднего угла 7 во второй задний угол 8 корпуса 1 устройства управления положением задних ног животного, в общем параллельна касательной заднего края 15 пола 14 доильного стойла, где задний край 15 пересекает центральная линия x3 доильного стойла. На фиг. 4 показана зона 19 между задней стороной 6 корпуса 1 и задним краем 15 пола 14.
Доильное стойло справа на фиг. 4 имеет устройство управления положением задних ног животного согласно предшествующему уровню техники, которое также расположено с центральной линией, совпадающей с центральной линией доильного стойла, в котором оно расположено. Зона 20, соответствующая зоне 19, показанной в доильном стойле согласно изобретению, также показана в доильном стойле согласно предшествующему уровню техники. Зона 19 в доильном стойле согласно изобретению имеет почти такое же расстояние между первым задним углом 7 корпуса 1 и задним краем 15 пола, как между вторым задним углом 8 и задним краем 15. Зона 19 является симметричной или очень близка к симметричной. С другой стороны, зона 20 доильного стойла предшествующего уровня техники является асимметричной и имеет гораздо большее расстояние между первым задним углом и задним краем, чем между вторым задним углом и задним краем пола, оставляя больше места для расположения там копыта животного. За счет этого увеличивается риск небольшого расстояния между задними ногами животного.
Доильное стойло согласно настоящему изобретению, показанное на фиг. 4, является одним из множества доильных стойл вращающегося доильного зала. Во вращающемся доильном зале каждое стойло имеет продольное направление, определяемое его центральной линией x3, которая имеет угол δ приблизительно 20° относительно радиуса r, проходящего от оси вращения вращающейся платформы. Таким образом, указанный вращающийся доильный зал отличается тем, что доильными стойлами, расположенными на вращающейся платформе, являются доильные стойла согласно настоящему изобретению.
На фиг. 5 показан альтернативный вариант осуществления устройства управления положением задних ног животного согласно настоящему изобретению. Корпус 101 имеет первую и вторую боковые стороны 103, 104, которые имеют одинаковую длину и которые проходят параллельно друг другу. Однако, боковые стороны 103, 104 смещены друг относительно друга в продольном направлении корпуса 101. Передний конец 105 и задняя сторона 106 имеют похожий изгиб. Они могут быть прямолинейными и параллельными. Общей формой корпуса, если смотреть сверху, является форма параллелограмма. Первый задний угол 107 и второй задний угол 108 расположены в разных продольных положениях в продольном направлении корпуса 101. Линия x, которая образует продольное направление корпуса 101, является центральной линией, проходящей между первой и второй боковыми сторонами 103, 104 от средней точки переднего конца 105 до средней точки задней стороны 106.
На фиг. 6 показан дополнительный вариант осуществления устройства управления положением задних ног животного согласно настоящему изобретению. Корпус 201 содержит два отдельных вспомогательных корпуса 201’, 201’’, которые вместе образуют указанный корпус 201. Как и в других вариантах осуществления корпус 201 имеет первую боковую сторону 203 и вторую боковую сторону 204, передний конец 205 и заднюю сторону 206. Он также имеет первый задний угол 207 и второй задний угол 208. Линия x, которая образует продольное направление корпуса 201, является центральной линией, проходящей между первой и второй боковыми сторонами 203, 204 от средней точки переднего конца 205 до средней точки задней стороны 206.
Первый вспомогательный корпус 201’ имеет первый и второй задние углы 209, 210, которые расположены в одинаковых продольных положениях в продольном направлении корпуса 201. Второй вспомогательный корпус 201’’ имеет клиновидную форму, если смотреть сверху, и выполнен с возможностью расположения вдоль задней стороны 211 первого вспомогательного корпуса 201’. Второй вспомогательный корпус 201’’ можно рассматривать, как компонент, который можно установить на устройство управления положением задних ног животного согласно предшествующему уровню техники. Однако, конструкция самого второго вспомогательного корпуса соответствует идее настоящего изобретения. Таким образом, сам второй вспомогательный корпус 201’’ попадает под объем защиты, запрашиваемый настоящей заявкой.
Следует заметить, что специалисту в данной области будет очевидно множество комбинаций вспомогательных корпусов без отступления при этом от объема защиты, определенного в прилагаемой формуле изобретения патента.
Реферат
Группа изобретений относится к сельскому хозяйству, в частности к вспомогательному оборудованию доильных устройств. Устройство управления положением задних ног животного содержит корпус, продольное направление которого определяется линией, проходящей от переднего конца к задней стороне. Передний конец выполнен с возможностью поворота в направлении передней части доильного стойла, когда корпус находится в рабочем положении в доильном стойле. Задняя сторона выполнена с возможностью поворота в направлении задней части доильного стойла, когда корпус находится в рабочем положении в доильном стойле. Первый задний угол и второй задний угол расположены в разных продольных положениях в продольном направлении корпуса. Устройство управления положением задних ног животного расположено в задней части доильного стойла, причем его задняя сторона повернута в направлении заднего края пола доильного стойла. Вращающийся доильный зал содержит вращающуюся платформу, на которой расположены доильные стойла. Каждое стойло имеет продольное направление, которое имеет угол 5°–45° относительно радиуса, проходящего от оси вращения вращающейся платформы. Упрощается прикрепление доильного устройства к вымени коровы. 3 н. и 17 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для оценки пригодности коров к машинному доению
Комментарии