Система управления транспортным средством - RU2339203C2
Код документа: RU2339203C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления транспортным средством с системой направления по заданной колее в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Использование так называемых систем направления по заданной колее имеет большое практическое значение для транспортных средств, таких как сельскохозяйственные машины. Эти системы предназначены для полностью или частично автоматизированного направления машин по маршруту, определяемому заданными виртуальными или реальными линиями, и позволяют в значительной степени освободить водителя от операций рулевого управления, требующих умения и опыта. С давних пор используются механические системы направления по заданной колее, в которых, как правило, на подлежащей обработке территории материальные заданные линии ощупываются механическими щупами, вырабатывающими из воспринятых контуров сигналы рулевого управления для направления транспортного средства вдоль этого воспринятого контура. Поскольку такие системы производят считывание территории перед транспортным средством только на очень ограниченной площади, они все шире заменяются электронными системами, которые, как правило, могут воспринимать подлежащую обработке территорию также и на большом удалении от транспортного средства. За счет способности таких систем заблаговременно распознавать подлежащую обработке территорию может значительно лучше учитываться инерция конкретной системы рулевого управления.
В области электронных систем распознавания маршрутов широко распространены системы на основе GPS (Global Positioning System - глобальная система навигации и определения местоположения). Такая система рулевого управления на основе GPS описана на примере зерноуборочного комбайна в патентном документе ФРГ № 10129135 А1. Однако устройства для определения положения на основе GPS обладают тем недостатком, что погрешности сигналов, вызванные погрешностями времени пробега сигналов GPS или помехами приема, могут приводить к значительным нарушениям в автоматическом рулевом управлении транспортным средством. При определенных обстоятельствах это может привести к тому, что система рулевого управления уводит транспортное средство от заданной траектории движения, что существенно ухудшает качество работы. Для ограничения таких погрешностей в патентном документе ФРГ № 10129135 предложено скомбинировать систему распознавания маршрутов на основе GPS с лазерной системой считывания или с системой обработки изображений. Сигналы положения, генерируемые системами соответствующей комбинированной системы, сопоставляются в устройстве обработки и управления, а логический алгоритм оценивает качество сигналов и вырабатывает сигнал корректировки положения в зависимости от оценки качества информации. Недостаток такой системы состоит, прежде всего, в том, что она основывается на данных положения от двух систем распознавания маршрутов. Если один или оба сигнала пропадают, генерируется компенсационный сигнал положения, который иногда может значительно отклоняться от сигнала действительного положения транспортного средства. Это рассогласование тем больше, чем хуже качество сигналов положения, принимаемых отдельными системами распознавания маршрутов.
Кроме того, при подобном взаимодействии нескольких систем распознавания маршрутов не учитывается, что при наличии четко выраженных оптических задающих линий на подлежащей обработке территории та система распознавания маршрутов, которая непосредственно считывает территорию, предоставляет более точные данные положения, чем система на основе GPS, поскольку первая система непосредственно передает действительные соотношения на территории. В примере осуществления изобретения по патентному документу ФРГ № 10129135 эти сигналы положения привлекаются только для корректировки данных положения от системы на основе GPS.
Поскольку во многих случаях использования требуется отражение действительных географических условий на подлежащей обработке территории, из уровня техники известны решения систем, в которых определение данных положения на основе GPS полностью заменено системами на основе камеры. Пример такого решения описан в патентном документе ФРГ №10328395. В представленной системе путь движения сельскохозяйственного транспортного средства в виде тягача распознается с помощью расположенного на тягаче устройства приема изображений. Генерируемые изображения сравниваются с данными изображений заданного маршрута, заложенными в устройстве обработки и управления, и в зависимости от этого сравнения производится корректировка пути движения путем генерирования требуемых сигналов рулевого управления.
В системе направления по заданной колее в соответствии с решением по патентному документу ФРГ № 10328395 транспортное средство также принуждается к следованию по предварительно определенному пути движения, как и в системе на основе GPS. Соответственно, заданный путь движения должен быть разработан предварительно. Однако этот предварительно разработанный путь движения может значительно отклоняться от реальных условий в тех случаях, когда условия роста культуры могут требовать оптимального, бережного по отношению к растительности объезда территории по пути движения, отличному от предварительно разработанного маршрута. В таком случае соблюдение предварительно разработанного маршрута приводило бы к наезду на растительность и связанные с ним потери урожая. Такие системы обладают теми же недостатками, что и системы на основе GPS, поскольку система по указанному патентному документу ФРГ №10328395 структурно построена аналогичным образом.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и создании автоматической системы управления транспортным средством с системой направления по заданной колее, обеспечивающей высокое качество работы при изменяющейся структуре территории, подлежащей обработке.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков, изложенных в пункте 1 формулы изобретения.
За счет того, что система направления по заданной колее содержит по меньшей мере первую систему распознавания маршрутов и по меньшей мере дополнительную систему распознавания маршрутов, причем эти системы распознавания маршрутов связаны друг с другом посредством устройства управления таким образом, что может производиться переключение между системами распознавания маршрутов, обеспечивается высокое качество работы системы направления по заданной колее также и на обрабатываемых территориях изменяющейся структуры.
В обеспеченном техническими средствами и универсально применимом примере осуществления системы направления по заданной колее первая система распознавания маршрутов является системой распознавания маршрутов на основе GPS. Такая система имеет особенное преимущество в том, что она относительно независима от запыления, создаваемого при работе машины, и обеспечивает получение очень точных данных положения.
Для создания универсально применимой системы направления по заданной колее вторая система распознавания маршрутов является системой распознавания маршрутов на основе камеры, т.е. устройства, воспринимающего видеоизображение. Особенное преимущество решения заключается в том, что автоматическое рулевое управление машиной возможно также в тех случаях, когда для подлежащей обработке территории не имеется маршрутов в цифровой форме или в выросшей растительности требуется очень точное направление машины по заданной колее во избежание повреждения растений.
В предпочтительном примере выполнения камера выполнена в виде стереокамеры, так что может генерироваться пространственное изображение подлежащей обработке территории и проложенных на ней проходов для движения машины.
В обеспеченном техническими средствами примере осуществления стереокамера выполнена в виде системы из двух камер, расположенных под углом друг к другу, или в виде плоской камеры с измерением времени пробега (световых лучей).
Системы распознавания маршрутов на основе камеры обеспечивают точное направление по заданной колее в тех случаях, когда маршруты транспортного средства должны быть очень точно привязаны к конкретным локальным условиям на территории, подлежащей обработке. Поэтому в предпочтительном примере осуществления предусмотрено, что переключение между системами распознавания маршрутов может производиться на основе критериев регулирования и/или пользователем.
В простейшем случае критерии регулирования образованы факторами наличия или отсутствия оптических опорных линий на подлежащей обработке территории, причем этими оптическими опорными линиями могут быть проходы и/или ряды растений и/или кромки растительности.
Большая гибкость автоматического направления по заданной колее и высокое качество работы транспортного средства обеспечиваются в том случае, когда при наличии оптических опорных линий и/или отсутствии маршрутов в цифровой форме на подлежащей обработке территории система направления по заданной колее приводится в действие содержащей камеру системой распознавания маршрутов.
В предпочтительном решении по развитию изобретения для тех случаев, когда проезд по растительности на обрабатываемой территории не имеет значения, автоматическое управление сельскохозяйственной машиной может осуществляться эффективным образом за счет того, что при отсутствии оптических опорных линий и/или наличии в распоряжении маршрутов в цифровой форме на подлежащей обработке территории система направления по заданной колее приводится в действие системой распознавания маршрутов на основе GPS.
Особенно простая интеграция системы направления по заданной колее в транспортное средство достигается в том случае, когда система распознавания маршрутов на основе GPS и содержащая камеру система распознавания маршрутов связаны друг с другом посредством устройства управления, которое связывает системы распознавания маршрутов с контуром рулевого управления.
Значительное освобождение водителя сельхозмашины от нагрузки достигается, когда устройство управления определяет критерии регулирования для выбора системы распознавания маршрутов. В частности, в этом случае процесс направления по заданной колее может быть в значительной мере автоматизирован, так что водитель сельхозмашины может сконцентрироваться на наблюдении за самыми различными рабочими процессами.
В примере компактного конструктивного решения системы направления по заданной колее в отношении электронных компонентов устройство управления из выходных сигналов систем распознавания маршрутов генерирует непосредственно сигналы рулевого управления для контура рулевого управления.
Для того, чтобы обеспечить возможность воспроизведения маршрутов, воспринятых системой на основе камеры, для целей дальнейших этапов обработки, в предпочтительном примере осуществления система распознавания маршрутов на основе камеры и система распознавания маршрутов на основе GPS связаны друг с другом таким образом, что при эксплуатации транспортного средства с использованием системы распознавания маршрутов на основе камеры производится картографическая запись маршрута с привлечением системы распознавания маршрутов на основе GPS.
В дальнейшем предпочтительном примере осуществления универсальная применимость системы направления по заданной колее обеспечивается благодаря тому, что система направления по заданной колее выполнена модульной, а системы распознавания маршрутов интегрированы в систему направления по заданной колее с возможностью переключения с одной системы на другую.
Дальнейшие предпочтительные примеры осуществления изобретения изложены в зависимых пунктах.
Перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны предпочтительные примеры осуществления изобретения. На чертежах:
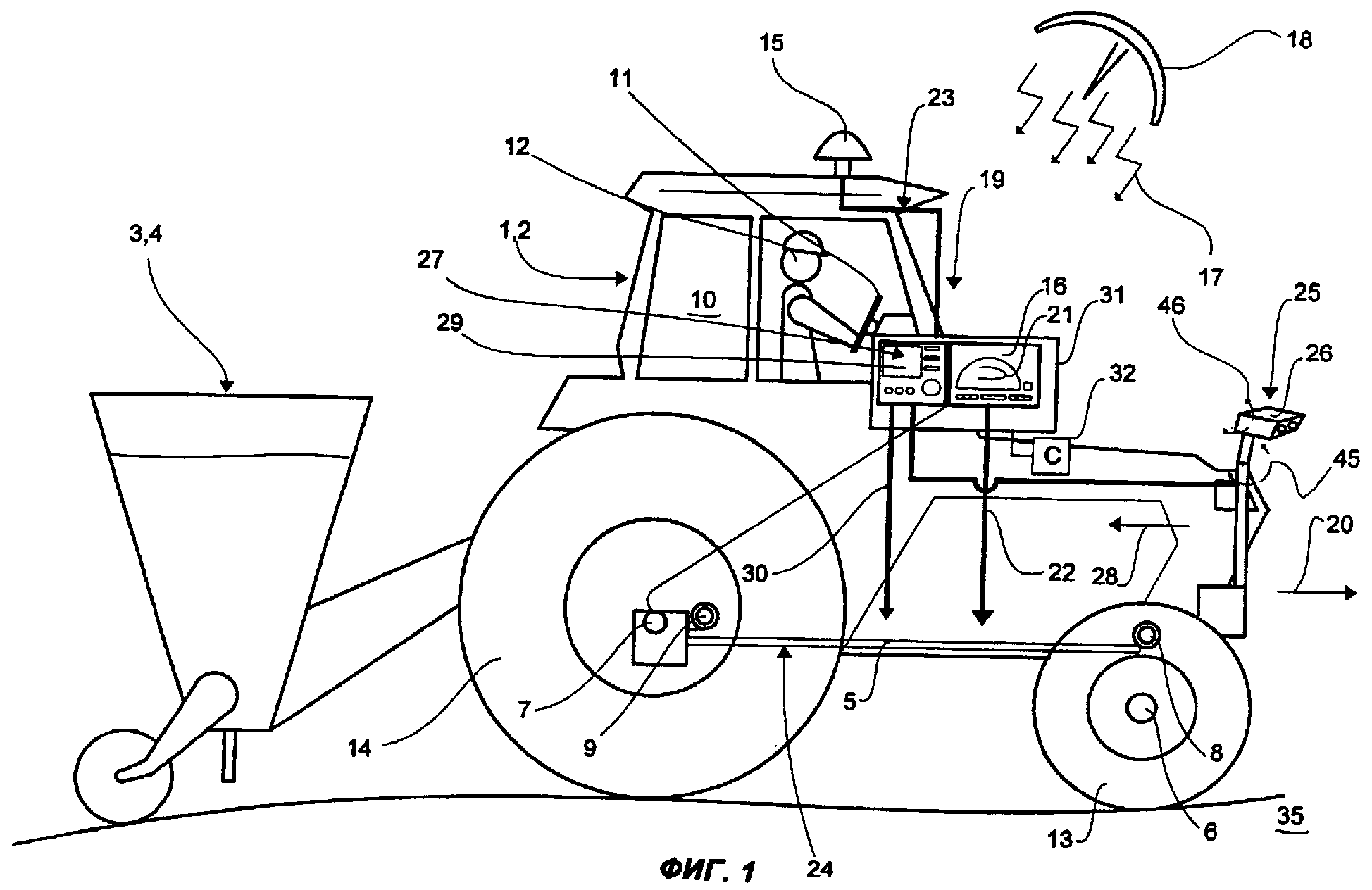
фиг.1 схематично изображает на виде сбоку транспортное средство с устройством рулевого управления по изобретению,
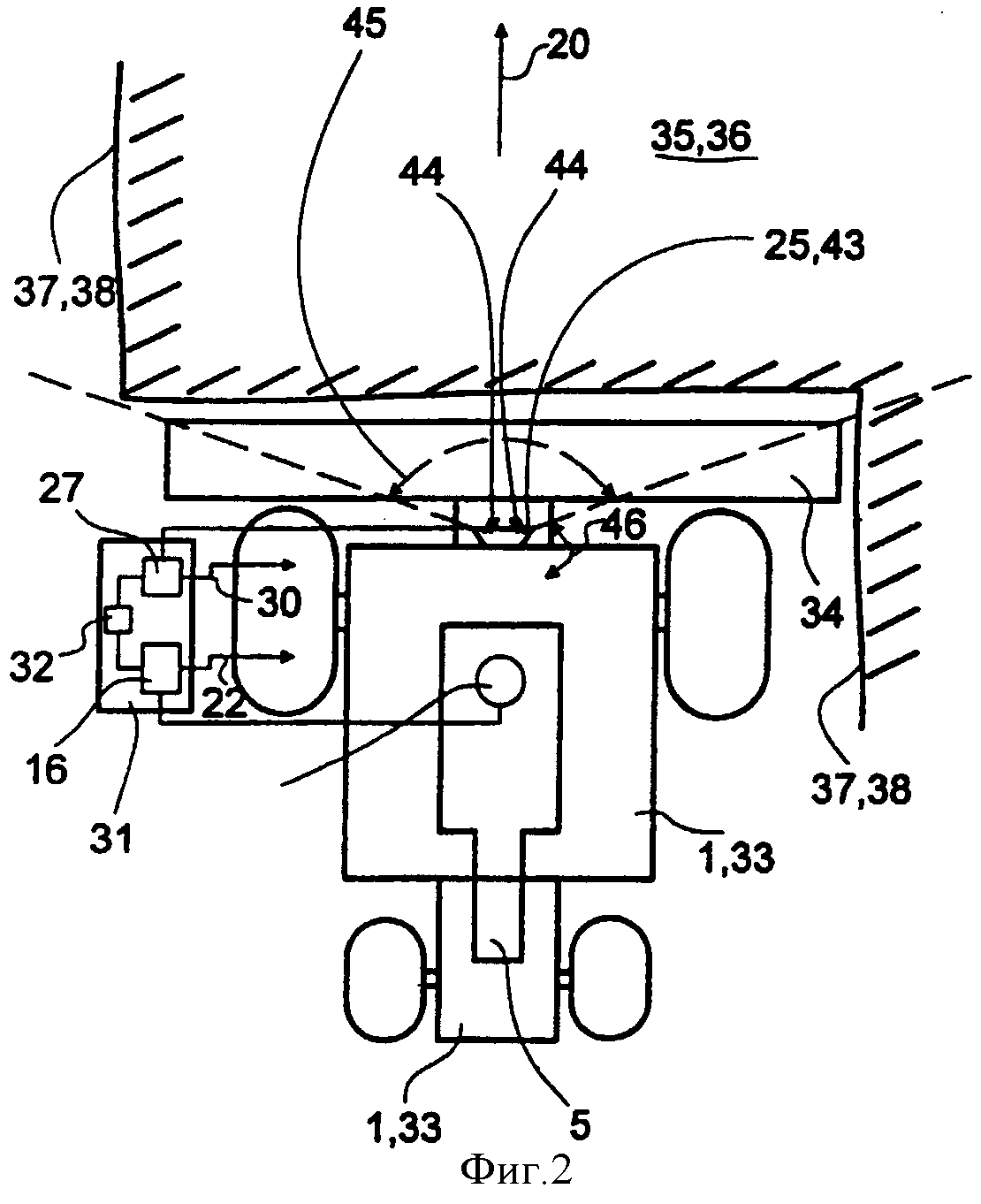
фиг.2 изображает использование системы автоматического направления по заданной колее на зерноуборочном комбайне.
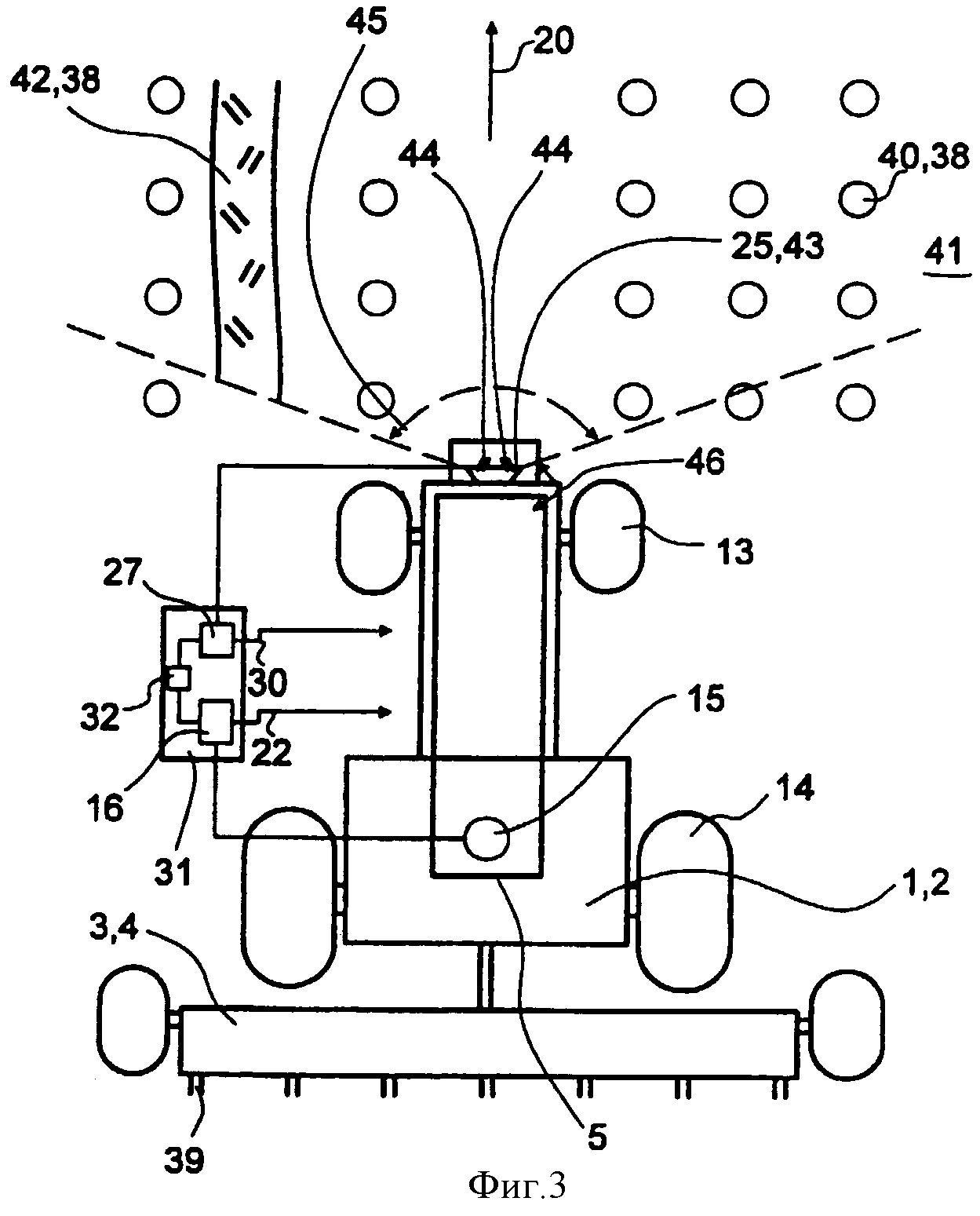
фиг.3 изображает использование системы автоматического направления по заданной колее на разбрасывателе удобрений (вид сверху).
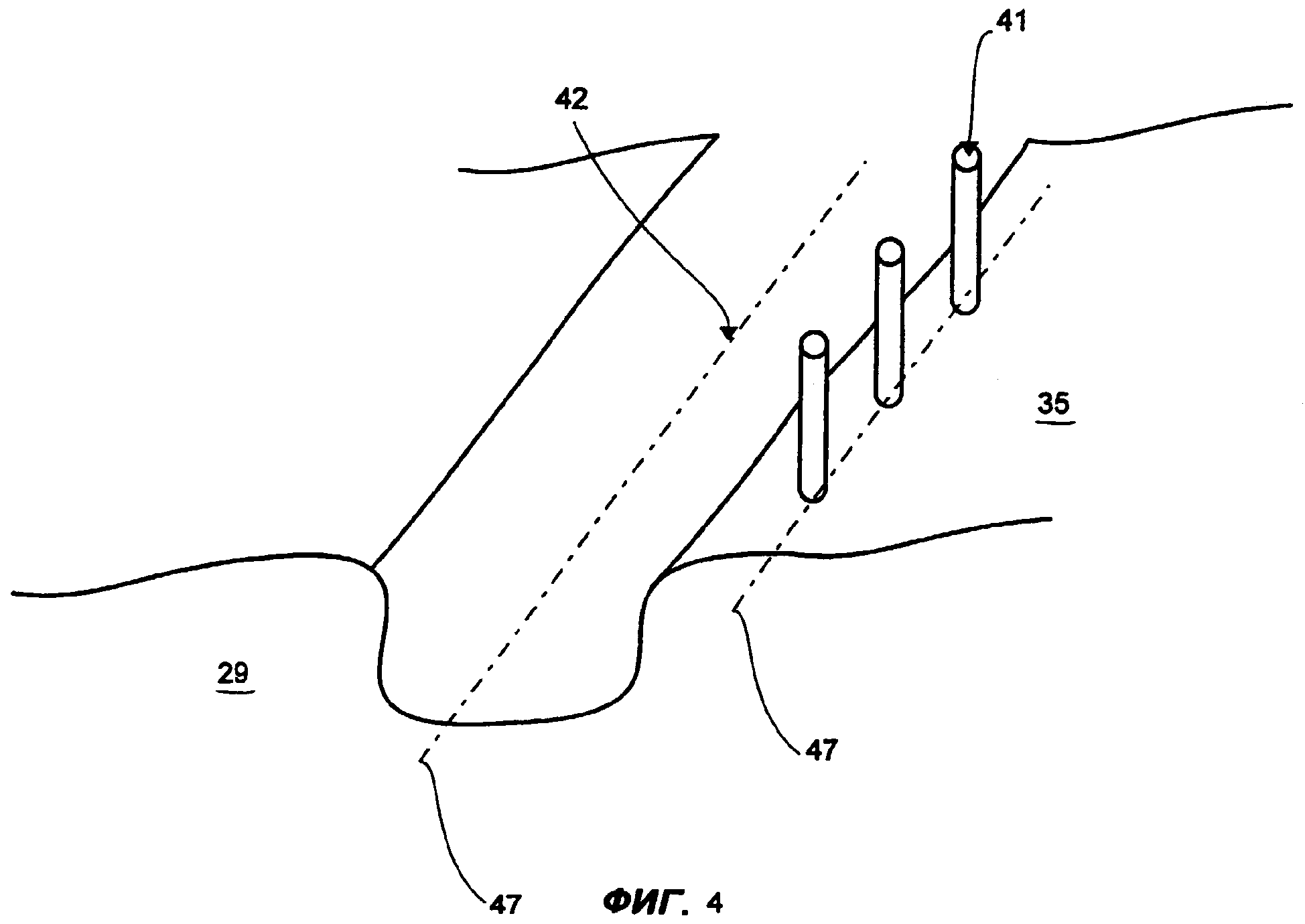
фиг.4 изображает подробный вид генерируемого пространственного изображения территории, подлежащей обработке,
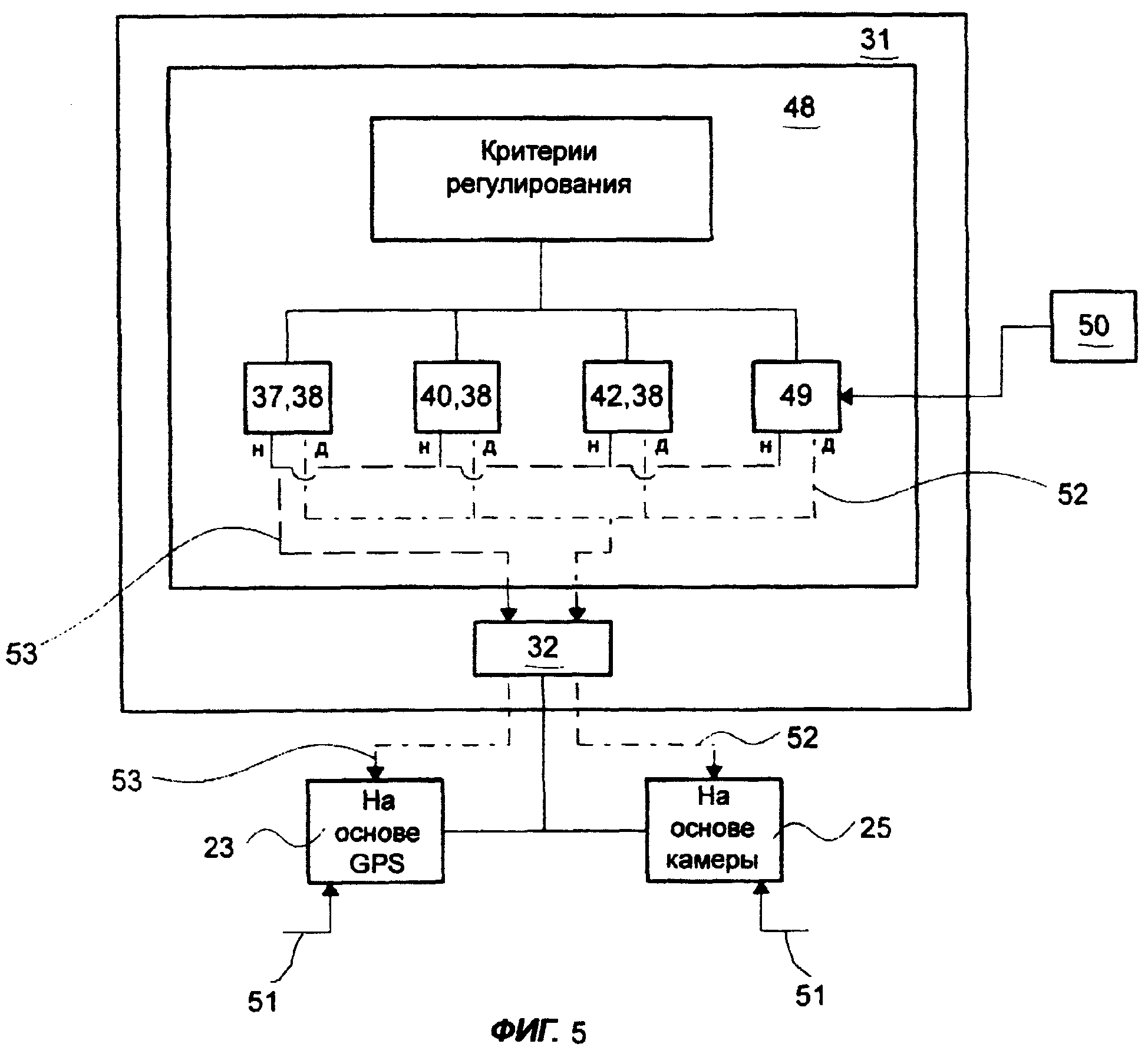
фиг.5 изображает блок-схему взаимосвязи между критериями управления, оптическими заданными линиями и предварительно заданными маршрутами.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 показана сельхозмашина 1 в виде тягача 2, к которому сзади подсоединен обрабатывающий аппарат 3 в виде разбрасывателя 4 удобрений. В рамках изобретения предусмотрено, что обрабатывающий аппарат 3 может быть выполнен любым образом и соединен с тягачом любым образом с различных сторон. Так, например, обрабатывающий аппарат 3 может быть выполнен в виде культиватора, механических граблей, оборудования для опрыскивания гербицидами или жатвенного аппарата, состоящего из одной или нескольких частей и соединенного с тягачом в различных положениях по отношению к нему.
Тягач 2, сам по себе известный, оснащен гидравлическим контуром 5 рулевого управления, который известным образом кинематически связан с передней ходовой осью 6 и/или задней ходовой осью 7 и/или с цилиндрами 8, 9 рулевого управления колесами 13, 14. С помощью расположенного в кабине 10 руля 11 водитель 12 может обычным образом управлять действием цилиндров 8, 9 рулевого управления колесами и за счет этого управлять поворотами тягача 2. При этом в зависимости от исполнения контура 5 рулевого управления управляемыми могут быть только колеса 13 передней ходовой оси 6, все колеса 13, 14 ходовых осей 6, 7 или каждое колесо 13, 14 отдельно.
Тягач 2 оснащен также расположенным на крыше кабины датчиком 15 системы GPS, который связан с устройством 16 обработки данных и из сигналов 17 положения от спутниковых GPS-систем 18 генерирует сигналы 19 положения тягача 2 на основе системы GPS. Известным образом эти сигналы 19 положения тягача 2 могут привлекаться для записи маршрутов 20, пройденных тягачом 2. Автоматическая система рулевого управления тягачом 2 на основе системы GPS обычно выполнена таким образом, что маршрут 20, определенный на основе системы GPS, в простейшем случае сравнивается с заданной колеей 21 движения, заложенной в устройстве 16 обработки данных. Если выявленный маршрут 20 отклоняется от заданной колеи 21 движения, в устройстве 16 обработки данных генерируются сигналы 22 рулевого управления, которые автоматически приводят в действие контур 5 рулевого управления и посредством регулировки цилиндров 8, 9 рулевого управления обеспечивают приведение действительного маршрута 20 в соответствие с заданным маршрутом 21.
В соответствии с изобретением датчик 15 системы GPS и связанное с ним устройство 16 обработки данных образуют первую систему 23 распознавания маршрутов в системе 24 направления по заданной колее. Эта система 24 направления по заданной колее содержит, кроме датчика 15 системы GPS, устройства 16 обработки данных и контура 5 рулевого управления, дополнительную систему 25 распознавания маршрутов. В представленном примере выполнения дополнительная система 25 распознавания маршрутов содержит систему 26 распознавания изображений, которая расположена на тягаче 2 спереди и связана с устройством 27 обработки данных таким образом, что это устройство 27 обработки данных преобразует сигналы 28 изображений в реальные изображения 29 воспринимаемой территории 35 и в определенных случаях представляет их на индикаторном устройстве. Кроме того, связанное с системой 26 распознавания изображений устройство 27 обработки данных генерирует сигналы 30 рулевого управления, которые могут обеспечивать автоматическое рулевое управление тягачом 2 посредством воздействия на контур 5 рулевого управления аналогично воздействию системы 23 распознавания маршрутов на основе GPS.
В представленном примере выполнения по фиг.1 каждая система 23, 25 распознавания маршрутов содержит отдельное устройство 16, 27 обработки данных. В рамках изобретения для обеих систем 23, 25 может быть предусмотрено одно общее устройство 31 обработки данных. В зависимости от исполнения с раздельными устройствами 16, 27 обработки данных или с общим устройством 31 обработки данных связано устройство 32 управления для переключения между системами 23, 25 распознавания маршрутов таким образом, что система 24 направления по заданной колее может опираться на данные положения либо от системы на основе GPS, либо от системы на основе камеры и из этих данных генерировать сигналы 22, 30 рулевого управления, передаваемые на контур 5 рулевого управления.
В то время как первая система 23 распознавания маршрутов является известной и не описываемой здесь подробно системой на основе GPS, дополнительная система 25 распознавания маршрутов на основе камеры будет подробно описана ниже со ссылками на фиг.2. На фиг.2 показаны два случая использования системы рулевого управления в соответствии с изобретением. На левом чертеже сельхозмашина 1 представляет собой зерноуборочный комбайн 33 с навешенным спереди жатвенным аппаратом 34, который срезает растительность 36 на подлежащей обработке территории 35 и передает ее в зерноуборочный комбайн. По мере уборки растительности 36 формируются кромки 37 растительности, которые одновременно образуют оптические опорные линии 38 на подлежащей обработке территории 35.
На правом чертеже сельхозмашина показана на виде сверху. В упрощенном виде показан обрабатывающий аппарат 3 в виде разбрасывателя 4 удобрений с выпускными элементами 39, которые могут целенаправленно подавать удобрения на отдельные ряды 40 растений. Такая система является типовой при работе с подросшей растительностью 41, которая может представлять собой ряды кукурузы, свеклы, различных овощных растений, картофеля и т.д. В такой растительности, как правило, хорошо заметны проходы 42. В этом примере использования ряды 40 и проходы 42 образуют оптические опорные линии 38 растительности на подлежащей обработке территории 35.
Каждая из сельхозмашин 1, 2, 33 оснащена уже описанными датчиком 15 системы GPS и связанным с ним устройством 16 обработки данных, которое генерирует сигналы 22 рулевого управления, передаваемые на контур 5 рулевого управления. Кроме того, каждая сельхозмашина 1, 2, 33 оснащена в своей передней области дополнительной системой 25 распознавания маршрутов, которая также с помощью устройства 27 обработки данных генерирует сигнал 30 рулевого управления, передаваемый на контур 5 рулевого управления. С устройствами 16, 27 связано устройство 32 управления, которое в соответствии с изобретением обеспечивает переключение между двумя системами 23, 25 распознавания маршрутов. В показанном примере выполнения дополнительная система 25 распознавания маршрутов на основе камеры образована так называемой стереокамерой 43, которая известным образом образована двумя обычными камерами 44, расположенными под определенным углом друг к другу. Создание пространственных изображений обеспечивается соответствующим программным обеспечением. Создание изображений может осуществляться, например, в устройстве 32 управления и/или в устройстве 16, 27, 31 обработки данных. В рамках изобретения стереокамера может быть образована также однокамерной системой. При этом камера управляется таким образом, что одновременно привлекается время пробега световых лучей, образующих точки изображений, для определения третьей координаты. Для охвата с помощью стереокамеры 43 как можно большей области изображений на территории 35 дополнительная система 25 распознавания маршрутов расположена на сельхозмашине 1 с возможностью поворота в горизонтальном и вертикальном направлениях по стрелками 45, 46.
Как показано на фиг.3, в зависимости от характеристик стереокамеры 43 и предназначенного для нее программного обеспечения может обеспечиваться создание более или менее реального изображения 29 территории 35, воспринимаемой стереокамерой 43. В данном случае изображение воспроизводит ряды 40 растений и проходы 42. Далее с помощью соответствующего программного обеспечения распознавания изображений эти оптические опорные линии могут математически преобразовываться в эквивалентные линии 47 колеи, по которым может быть выведен сигнал 30 рулевого управления. В результате контур 5 рулевого управления регулируется таким образом, что сельхозмашина 1 следует по меньшей мере по одной эквивалентной линии 47 колеи, представляющей оптическую опорную линию 38.
Определение опорных линий 38 на подлежащей обработке территории 35 на основе камеры, как правило, лучше отражает действительные локальные условия на маршруте движения сельхозмашины 1, чем это обеспечивается системой 23 распознавания маршрутов на основе GPS. Поэтому выгодным является решение, позволяющее переключаться между системами 23 и 25 распознавания маршрутов на основе GPS и на основе камеры в зависимости от структуры территории 35, подлежащей обработке. В предпочтительном примере осуществления по фиг.4 это переключение между системами 23 и 25 распознавания маршрутов производится в зависимости от критериев 48 регулирования. В данном случае критериями регулирования могут быть либо наличие или отсутствие оптических опорных линий 38, таких как кромки 37 растительности, проходов 42 и рядов 40 растений на территории 35, либо предварительно определенные маршруты 49, разработанные системой 50 маршрутизации, которая сама по себе известна и подробно не описывается.
В простейшем случае водитель 12 сельхозмашины 1 сам выбирает подходящую систему 23 или 25 распознавания маршрутов путем шага 51 активизации соответствующего выключателя. В этом случае водитель 12 должен сам определить структуру подлежащей обработке территории 35 или наличие системы 50 маршрутизации. В примере осуществления, который значительно облегчает работу водителя 12, система 31 обработки данных производит проверку критериев 48 регулирования и управляет устройством 32 управления для активизации соответствующей системы 23, 25 распознавания маршрутов.
В примерах использования, представленных на фиг.2, только в показанном справа случае имеет существенное значение путь обхода территории 35, подлежащей обработке, так как отклонение тягача от оптимального маршрута 20 может привести к повреждению растительности 41 колесами 13, 14. В этом случае 52 (фиг.4) использования водитель 12 или устройство 31 обработки данных выбрали бы систему 25 распознавания маршрутов на основе камеры, так как эта система 25 лучше воспроизводит реальные условия на подлежащей обработке территории 35. То же самое относится к случаю использования, когда система 24 направления по заданной колее не может опираться на предварительно определенные маршруты 49 системы 50 маршрутизации.
В другом случае 53 использования, а именно когда объезд территории 35 имеет подчиненное значение, поскольку не может причинить повреждения растительности, а также нет оптических опорных линий 38, но имеются в распоряжении предварительно определенные маршруты 49 движения, активизируется система 23 распознавания маршрутов на основе GPS. В целях упрощения на фиг.5 наличие проходов обозначено буквой «д» как «да», а их отсутствие - буквой «н» как «нет».
В рамках изобретения для достижения повышенной гибкости системы рулевого управления устройство 32 управления может быть выполнено программируемым, так что для самых различных случаев использования могут быть определены самые различные критерии 48 для принятия решения. Кроме того, устройство 32 управления может быть выполнено таким образом, что оно одновременно образует устройство 16, 27 обработки данных соответствующей системы 23, 25 распознавания маршрутов. При этом все функции системы могут обеспечиваться одним компонентом. В этом случае устройство 32 управления непосредственно генерирует сигналы 22, 30 рулевого управления.
Электронное распознавание пройденных маршрутов 20 может в особенности использоваться для создания так называемых исторических кадастров данных, из которых в дальнейшем могут генерироваться подлежащие обработке маршруты 49. Поэтому большое преимущество дает такое решение, при котором при активизации системы 25 распознавания маршрутов на основе камеры одновременно производится запись маршрута 20 путем записи данных положения другой системой 23 распознавания маршрутов на основе GPS. Особенное преимущество заключается в том, что при будущих процессах обработки можно опираться на эти маршруты 49, более точно воспроизводящие реальные условия на подлежащей обработке территории 35.
За счет того, что устройство 32 управления и устройства 16, 27 обработки данных интегрированы в общем устройстве 31 обработки данных и встроены в соответствующую сельхозмашину 1, 2, 33, может обеспечиваться модульная структура системы 24 направления по заданной колее, которая позволяет производить любой обмен между системами 23, 25 распознавания маршрутов.
Специалисту в данной области понятно, что при разработке описанной системы рулевого управления возможны различные изменения и модификации, не выходящие за пределы объема защиты в пунктах формулы изобретения, а также использование ее в других машинах для получения описанных преимуществ.
Реферат
Изобретение относится к системе управления транспортным средством. Система управления транспортным средством включает систему направления по заданной колее для распознавания маршрута. Система направления по заданной колее через устройство обработки данных обеспечивает автоматическое рулевое управление транспортным средством. Система (24) направления по заданной колее содержит первую систему (23) распознавания маршрутов, выполненную в виде системы распознавания маршрутов на основе GPS и дополнительную систему (25) распознавания маршрутов, выполненную в виде системы (25) распознавания маршрутов на основе камеры. При этом системы (23, 25) распознавания маршрутов связаны друг с другом посредством по меньшей мере одного устройства (16, 27, 31) обработки данных таким образом, что может производиться переключение между системами распознавания маршрутов. Изобретение позволяет повысить качество управления работой устройства. 11 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ сбора данных и управления экскаватором