Сельскохозяйственная рабочая машина с устройством детектирования окружающего пространства - RU2731733C2
Код документа: RU2731733C2
Чертежи

Описание
Область техники, к которой относится изобретение
Изобретение относится к устройству детектирования окружающего пространства на сельскохозяйственной рабочей машине с признаками, раскрытыми в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Чтобы разгрузить оператора машины и повысить эффективность сельскохозяйственной рабочей машины на поле, в настоящее время все чаще управление сельскохозяйственной машиной, например при движении вдоль края посевов, и управление функциональными элементами сельскохозяйственной машины, например высотой мотовила на зерноуборочном комбайне или рабочей мощностью измельчительного аппарата на кормоуборочном комбайне, выполняют автоматическим в зависимости от условий окружающего пространства и ожидаемой урожайности. Для этого сельскохозяйственные машины в уровне техники часто оснащают устройствами детектирования окружающего пространства, сигналы которых используют для определения контура земельного участка или плотности посевов. В частности, в уровне техники известны устройства детектирования окружающего пространства в виде лазерных сканеров, допускающие автоматическое управление сельскохозяйственными рабочими машинами.
Патентные документы DE 19726917 А1 и ЕР 1269823 А1 описывают систему, например с лазерным датчиком, предназначенную для определения контура земельного участка в одной плоскости сканирования и для управления функциональными элементами.
Недостаток этого решения заключается в том, что датчик ограничен контуром земельного участка. Еще одним недостатком является то, что использование единственной плоскости сканирования приводит к значительному замедлению реакции системы управления, в результате чего при автоматическом управлении следует ожидать некоторых неточностей. Кроме того, необходимо найти компромисс между дальней зоной сканирования (и связанным с ней, например, ранним предупреждением при обнаружении препятствий) и ближней зоной сканирования (и связанным с ней более высоким разрешением и малой мертвой зоной).
Патентный документ ЕР 1266554 В1 описывает устройство для детектирования границ зоны обработки посредством установленного на кабине сельскохозяйственной машины лазерного датчика расстояния, причем площадь зоны сканирования в направлении движения (дальность зоны сканирования) и в поперечном направлении (ширина зоны сканирования) могут быть изменены в зависимости от условий окружающего пространства и состояния рабочей машины. Недостаток этого решения заключается в высоких затратах на адаптацию зоны сканирования к конкретным условиям. Кроме того, трудно осуществить полное сканирование и составление карты поля в связи с изменяющейся площадью зоны сканирования. Впоследствии управляющее и регулирующее устройство при изменении направления, ширины и дальности зоны сканирования располагает только неполными или неточными данными для управления функциональными элементами. Еще один недостаток заключается в том, что устройство детектирования окружающего пространства ограничено детектированием края посевов.
Раскрытие сущности изобретения
Таким образом, задачей настоящего изобретения является устранение указанных недостатков, присущих уровню техники, и, в частности, разработка устройства детектирования окружающего пространства, которое способно надежно детектировать, по меньшей мере, в ближней и дальней зоне, уменьшит количество необходимых датчиков, увеличит время упреждения, уменьшит инерционность управления и повысит точность автоматического управления.
Согласно изобретению эта задача решена посредством отличительных признаков, раскрытых в пункте 1 формулы изобретения.
Сельскохозяйственная рабочая машина, содержащая один или несколько управляемых функциональных элементов и устройство детектирования окружающего пространства для зонального сканирования окружающего пространства, причем устройство детектирования окружающего пространства генерирует сигналы детектирования окружающего пространства, которые могут быть обработаны управляющим и регулирующим устройством сельскохозяйственной рабочей машины, и выполнено в виде сканера, сканирующего окружающее пространство в плоскостях сканирования, причем каждой плоскости сканирования сопоставлено управление функциональными элементами, позволяет повысить надежность детектирования в ближней и дальней зоне, уменьшить количество необходимых датчиков и, тем самым, стоимость, увеличить время упреждения, уменьшить инерционность управления и повысить точность автоматического управления.
В предпочтительном варианте осуществления изобретения сигналы детектирования окружающего пространства представляют собой электромагнитные волны, предпочтительно лазерные лучи. Использование электромагнитных волн, в частности в виде лазерного луча, выгодно, главным образом, хорошей фокусировкой и разрешающей способностью, а также большой дальностью сигналов детектирования по сравнению со звуковыми волнами. Кроме того, преимуществом лазеров является очень узкий частотный диапазон.
Для сканирования можно технически простым способом излучать сигналы детектирования окружающего пространства, принимать отраженные сигналы детектирования окружающего пространства и получать результирующий сигнал, причем устройство детектирования окружающего пространства выполнено в виде сканера. Эта конфигурация выгодна также низкой стоимостью.
В следующем предпочтительном варианте осуществления изобретения под окружающим пространством понимают участок возделываемого сельскохозяйственного угодья, расположенный по направлению движения рабочей машины в радиусе действия сигнала детектирования окружающего пространства. Благодаря этому, в частности, устраняют необходимость в избыточном сканировании и, тем самым, загрузке сканера, снижающей срок его службы. Кроме того, сосредоточение на необходимой для решения задачи информации уменьшает объем данных, подлежащих обработке.
В следующем предпочтительном варианте осуществления изобретения поперечная протяженность окружающего пространства, по меньшей мере частично, превышает ширину сельскохозяйственной рабочей машины, причем ширина сельскохозяйственной рабочей машины может содержать установленное на ней навесное оборудование. Это гарантирует детектирование признаков земельного участка, объектов и/или препятствий не только в непосредственной рабочей зоне сельскохозяйственной рабочей машины, но и в пределах / за пределами боковой пограничной области сельскохозяйственной рабочей машины, а также снижение риска повреждения сельскохозяйственной рабочей машины. Кроме того, это обеспечивает надежное детектирование признаков земельного участка, объектов и/или препятствий, примыкающих к рабочей зоне сельскохозяйственной рабочей машины, например края посевов.
В особенно предпочтительном варианте осуществления изобретения устройство детектирования окружающего пространства зонально сканирует окружающее пространство в четырех плоскостях сканирования. Вследствие этого в любой момент t времени предоставлен увеличенный объем информации, характеризующийся увеличенной плотностью. Использование нескольких уровней сканирования позволяет снизить частоту поворота или вращения и частоту генерирования сигнала, что означает увеличение срока службы устройства детектирования окружающего пространства.
В следующем особенно предпочтительном варианте осуществления изобретения окружающее пространство, зонально просканированное устройством детектирования окружающего пространства, делят на ближнюю, среднюю и дальнюю зоны, причем каждой зоне сопоставлена одна или несколько плоскостей сканирования или не сопоставлена ни одна плоскость сканирования. В результате плоскости сканирования расположены на различном расстоянии друг от друга, а зонально просканированное окружающее пространство в момент t времени представляет собой клиновидную область, расширяющуюся в продольном направлении. Кроме того, это позволяет реализовать различную глубину проникновения в убираемую культуру сигнала детектирования окружающего пространства, благодаря чему можно обойтись только одним устройством детектирования окружающего пространства.
В следующем особенно предпочтительном варианте осуществления изобретения управляющее и регулирующее устройство на основании времени прохождения импульса отраженного сигнала детектирования окружающего пространства рассчитывает расстояние и/или плотность распределения. При расчете расстояния на основании времени прохождения импульса используют метод, работающий одинаково в ближней и дальней зоне и дающий точные результаты измерения. Определение плотности распределения позволяет, например, различать массивные объекты и убираемую культуру, благодаря чему, в частности, можно более надежно распознавать препятствия.
Чтобы можно быть установить взаимосвязь между отдельными найденными расстояниями и плотностями распределения, управляющее и регулирующее устройство на основании рассчитанных значений расстояния и/или плотности распределения вычисляет контур земельного участка и/или профиль изменения плотности посевов и/или составляет карту возделываемого сельскохозяйственного угодья. Это позволяет точнее распознавать объекты, препятствия и/или признаки земельного участка, например край посевов. В частности, добавление профиля изменения плотности посевов позволяет составить цифровую карту, например карту урожайности, которую можно использовать, в том числе, для целенаправленного внесения удобрений.
Кроме того, покрытие окружающего пространства по ширине и длине несколькими плоскостями сканирования позволяет частично смоделировать спутниковую навигацию, благодаря чему можно обойтись без дорогостоящей системы GPS-навигации. Кроме того, смоделированная спутниковая навигация может надежно работать вблизи деревьев и не зависит от площади покрытия спутникового сигнала.
В следующем особенно предпочтительном варианте осуществления изобретения функциональный элемент содержит один или несколько рабочих органов сельскохозяйственной рабочей машины, предпочтительно самоходной уборочной машины, предпочтительно зерноуборочного комбайна, и/или транспортного средства, сопровождающего сельскохозяйственную рабочую машину. Исполнение функциональных элементов в виде одного или нескольких рабочих органов выгодно тем, что допускает срабатывание нескольких взаимосвязанных технических узлов по отдельности или совместно друг с другом, в зависимости от предъявляемых требований. В качестве примера функционального элемента можно назвать молотильный аппарат, который можно разделить на рабочие органы и функциональные элементы: ускорительный барабан, молотильный барабан и отбойный битер.
В следующем предпочтительном варианте осуществления изобретения предусмотрено, что одной, нескольким или всем плоскостям сканирования сопоставлено управление одним, несколькими или всеми функциональными элементами. Благодаря этому, во-первых, можно управлять несколькими рабочими процессами одновременно, а во-вторых, выборочно получать информацию из различных просканированных участков. Таким образом, плоскости сканирования могут быть сопоставлены отдельным функциональным элементам в зависимости от условий окружающего пространства.
В следующем особенно предпочтительном варианте осуществления изобретения краткосрочное точное управление функциональными элементами осуществляют путем анализа плоскостей сканирования ближней зоны, а раннее грубое управление функциональными элементами - путем анализа одной или нескольких плоскостей сканирования средней или дальней зоны. Уменьшение угла сканирования земельного участка в ближней зоне приводит к сокращению мертвой зоны, что повышает надежность детектирования признаков земельного участка, объектов и/или препятствий. Кроме того, в более коротких, ближе расположенных к сельскохозяйственной рабочей машине, плоскостях сканирования увеличивается частота сканирования и связанное с ней разрешение. В результате, регулятор может точно адаптировать функциональные элементы к действительным условиям в непосредственной близости от машины практически в реальном времени и достичь повышения эффективности за счет более точного прохождения краев посевов, технологических колей или валков. Сканирование дальней зоны и связанное с ним увеличение времени упреждения позволяет заранее, последовательно, и щадя материал, изменять параметры функциональных элементов.
В следующем особенно предпочтительном варианте осуществления изобретения устройство детектирования окружающего пространства на основании анализа сигнала детектирования окружающего пространства в одной или нескольких плоскостях сканирования генерирует результирующий сигнал, содержащий сведения о положении препятствия в окружающем пространстве и передаваемый на управляющее и регулирующее устройство, которое на основании этого результирующего сигнала формирует сигналы рулевого управления и/или управляющие сигналы для одного или нескольких функциональных элементов сельскохозяйственной рабочей машины, в частности гидравлической системы рулевого управления, приводной системы, гидравлической тормозной системы и/или жатки. Таким образом, сельскохозяйственная рабочая машина при обнаружении препятствий на зонально просканированном окружающем пространстве, например, деревьев или телеграфных столбов, может автоматически откорректировать несколько функциональных элементов и/или изменить направление своего движения, чтобы избежать повреждения сельскохозяйственной рабочей машины при контакте с препятствием.
В следующем особенно предпочтительном варианте осуществления изобретения детектирование низких и/или малых препятствий осуществляют путем анализа плоскостей сканирования ближней зоны, а детектирование высоких и/или объемных препятствий - путем анализа одной или нескольких плоскостей сканирования средней и/или дальней зоны. В зависимости от размера препятствия и расстояния до сельскохозяйственной рабочей машины управляющее и регулирующее устройство инициирует маневр уклонения, аварийную остановку и/или подъем жатки. При этом маневр уклонения, учитывая необходимое увеличенное время упреждения инициируют, предпочтительно, сигналами детектирования окружающего пространства дальней зоны. В ближней зоне, благодаря большей глубине проникновения в убираемую культуру, меньшего затенения за счет сокращенной мертвой зоны, меньшей плотности посевов и повышенной частоты сканирования повышена вероятность обнаружения более мелких и более низких препятствий и вследствие уменьшенного времени упреждения инициируют аварийную остановку или подъем уборочного навесного оборудования.
В следующем особенно предпочтительном варианте осуществления изобретения устройство детектирования окружающего пространства на основании анализа сигнала детектирования окружающего пространства в одной или нескольких плоскостях сканирования генерирует результирующий сигнал, содержащий информацию о положении края посевов, высоте посевов, профиле изменения высоты посевов и/или профиле края посевов в окружающем пространстве и передаваемый на управляющее и регулирующее устройство, которое на основании этого результирующего сигнала формирует сигналы рулевого управления и/или управляющие сигналы для одного или нескольких функциональных элементов сельскохозяйственной рабочей машины. Благодаря этому, во-первых, становится возможным точно вести сельскохозяйственную рабочую машину вдоль края посевов на основании отсканированной ближней зоны и установить мотовило на оптимальную высоту. Во-вторых, увеличенная ширина плоскостей сканирования в дальней зоне позволяет точнее проходить вдоль края посевов и, в частности, избежать ненужных корректировок направления вследствие небольших неровностей профиля края посевов.
Прохождение вдоль края посевов и адаптация к высоте посевов могут быть осуществлены технически простым образом, если функциональные элементы содержат гидравлическую систему рулевого управления и/или мотовило. Это позволяет регулировать как боковое расстояние от жатки до края посевов, так и вертикальное расстояние от мотовила до посевов.
В следующем особенно предпочтительном варианте осуществления изобретения устройство детектирования окружающего пространства на основании анализа сигнала детектирования окружающего пространства в одной или нескольких плоскостях сканирования генерирует результирующий сигнал, содержащий информацию о конце поля в окружающем пространстве и передаваемый на управляющее и регулирующее устройство, которое на основании этого результирующего сигнала формирует сигналы рулевого управления и/или управляющие сигналы для одного или нескольких функциональных элементов сельскохозяйственной рабочей машины, которые содержат гидравлическую систему рулевого управления, гидравлическую тормозную систему, приводную систему и/или жатку. Это позволяет автоматически поднять жатку в конце поля в безопасное положение, вывести машину из полосы и направить в соседнюю полосу.
Краткое описание чертежей
Прочие предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы и детально описаны ниже на основании вариантов осуществления, представленных на фигурах. На фигурах изображено:
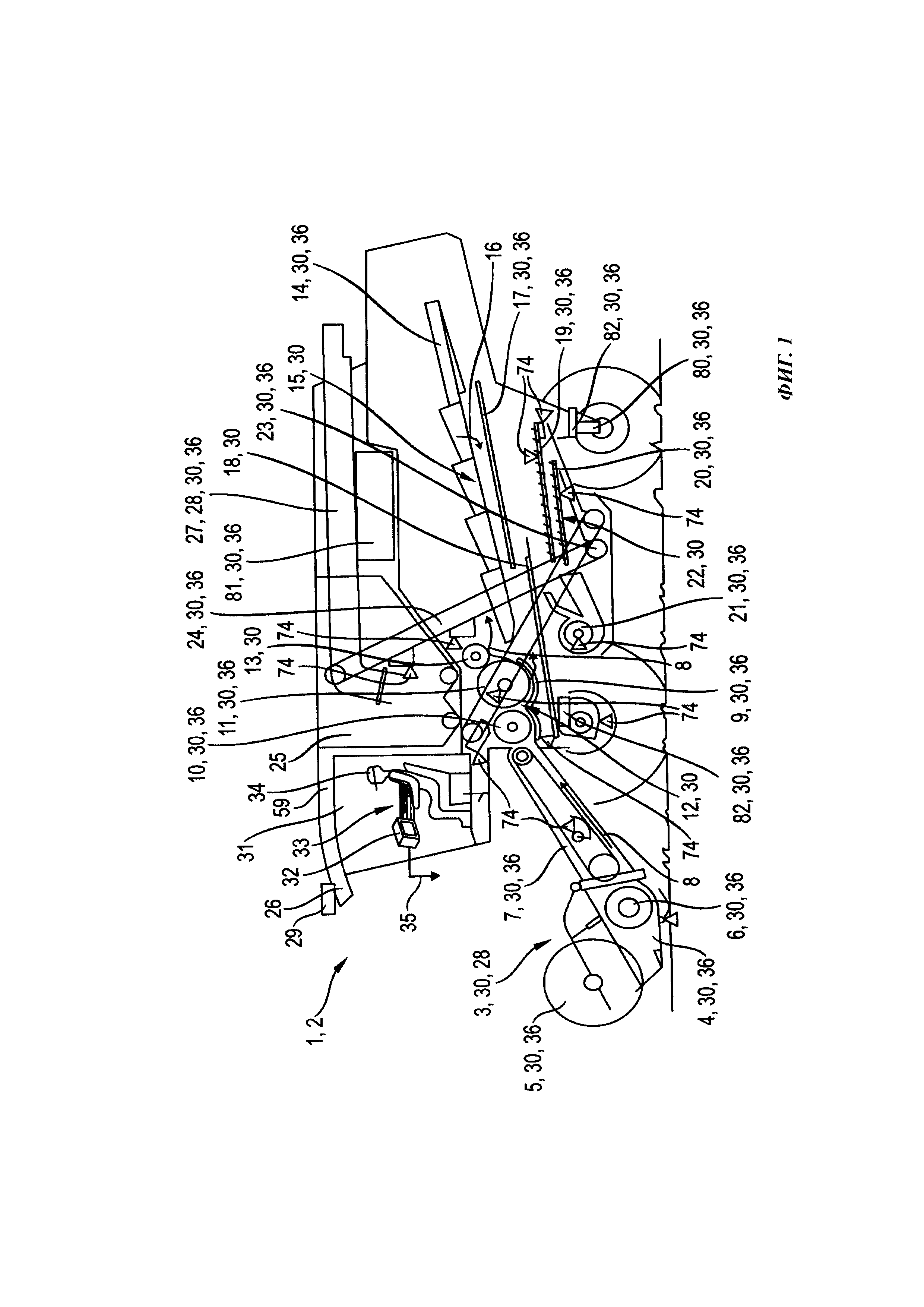
Фигура 1: схематичное изображение сельскохозяйственной рабочей машины, выполненной в виде зерноуборочного комбайна, с устройством детектирования окружающего пространства.
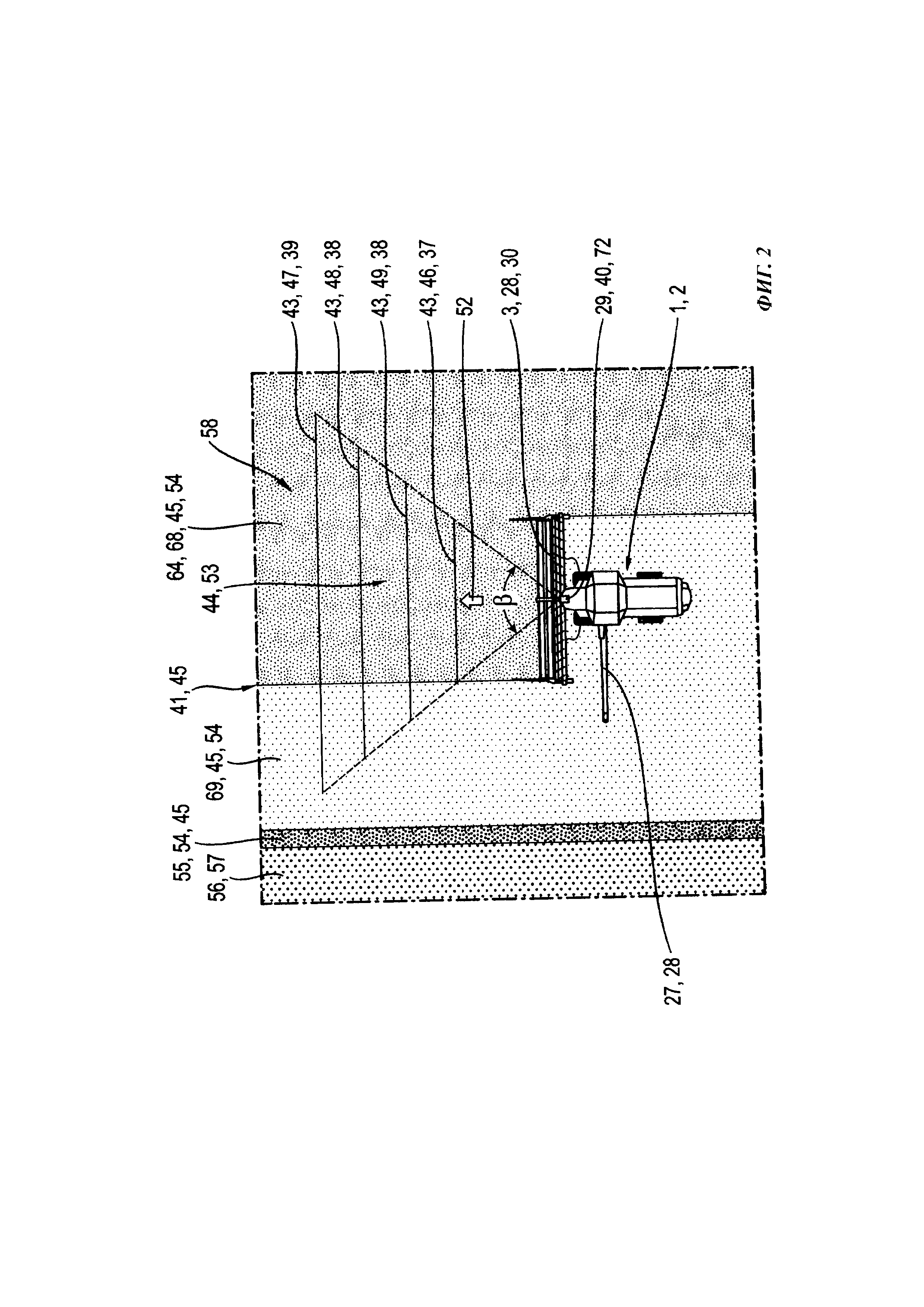
Фигура 2: схематичное изображение описываемых изобретением плоскостей сканирования в зонально просканированном окружающем пространстве (вид сверху).
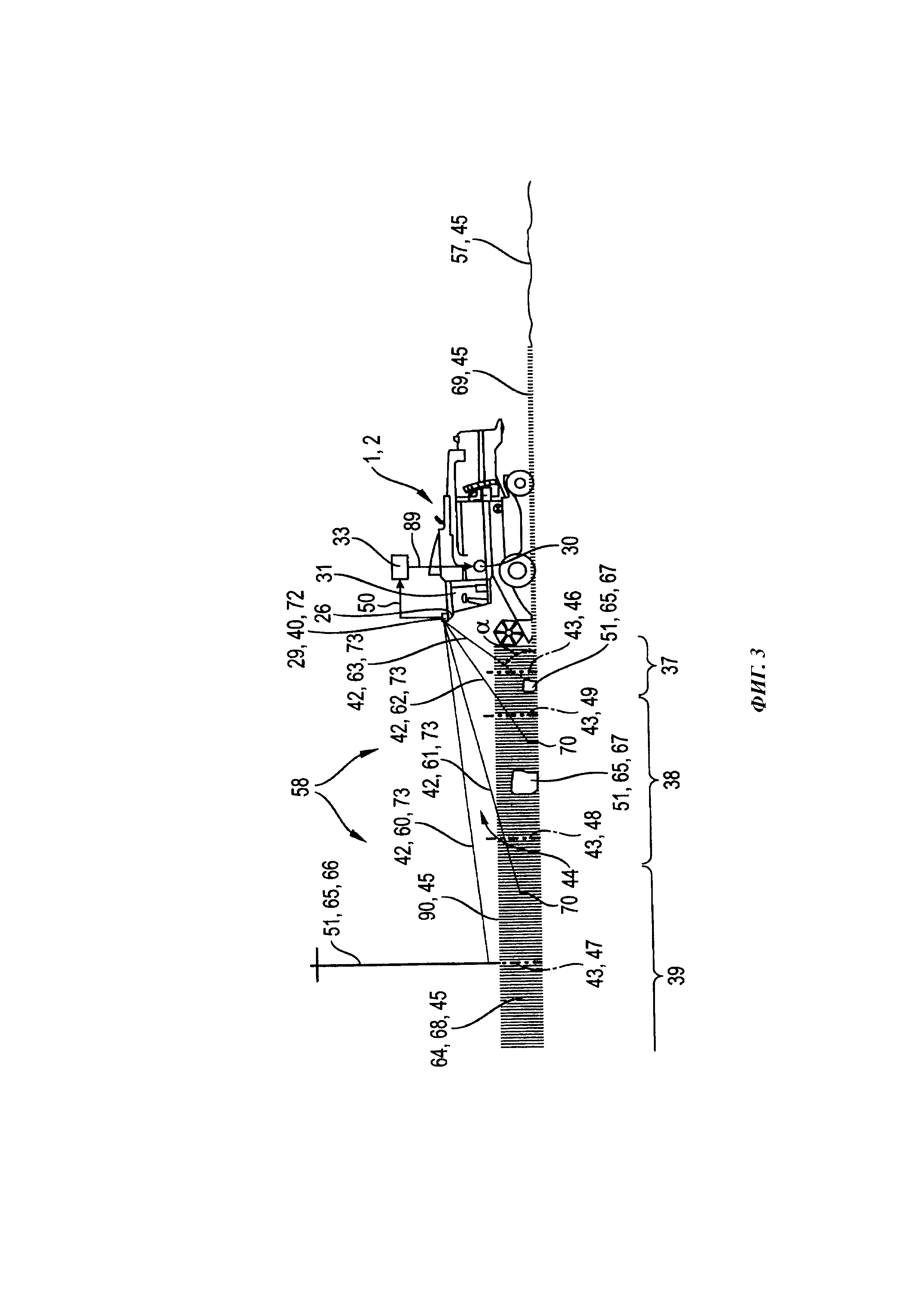
Фигура 3: схематичное изображение описываемых изобретением плоскостей сканирования в зонально просканированном окружающем пространстве (вид сбоку) - обнаружение препятствий.
Фигура 4: схематичное изображение описываемых изобретением плоскостей сканирования в зонально просканированном окружающем пространстве (вид сбоку) - обнаружение конца поля.
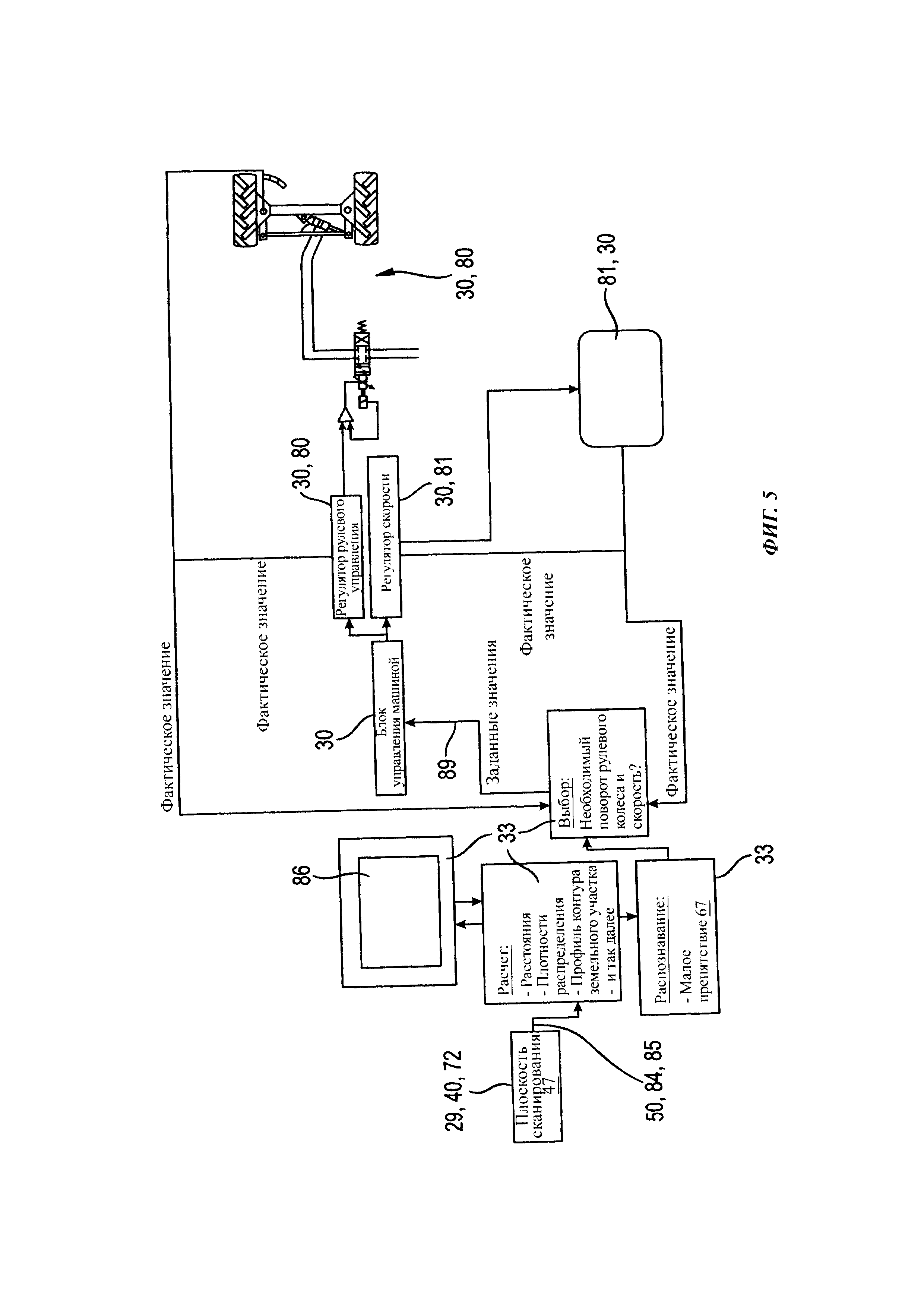
Фигура 5: схема регулирования и управления на примере большого препятствия.
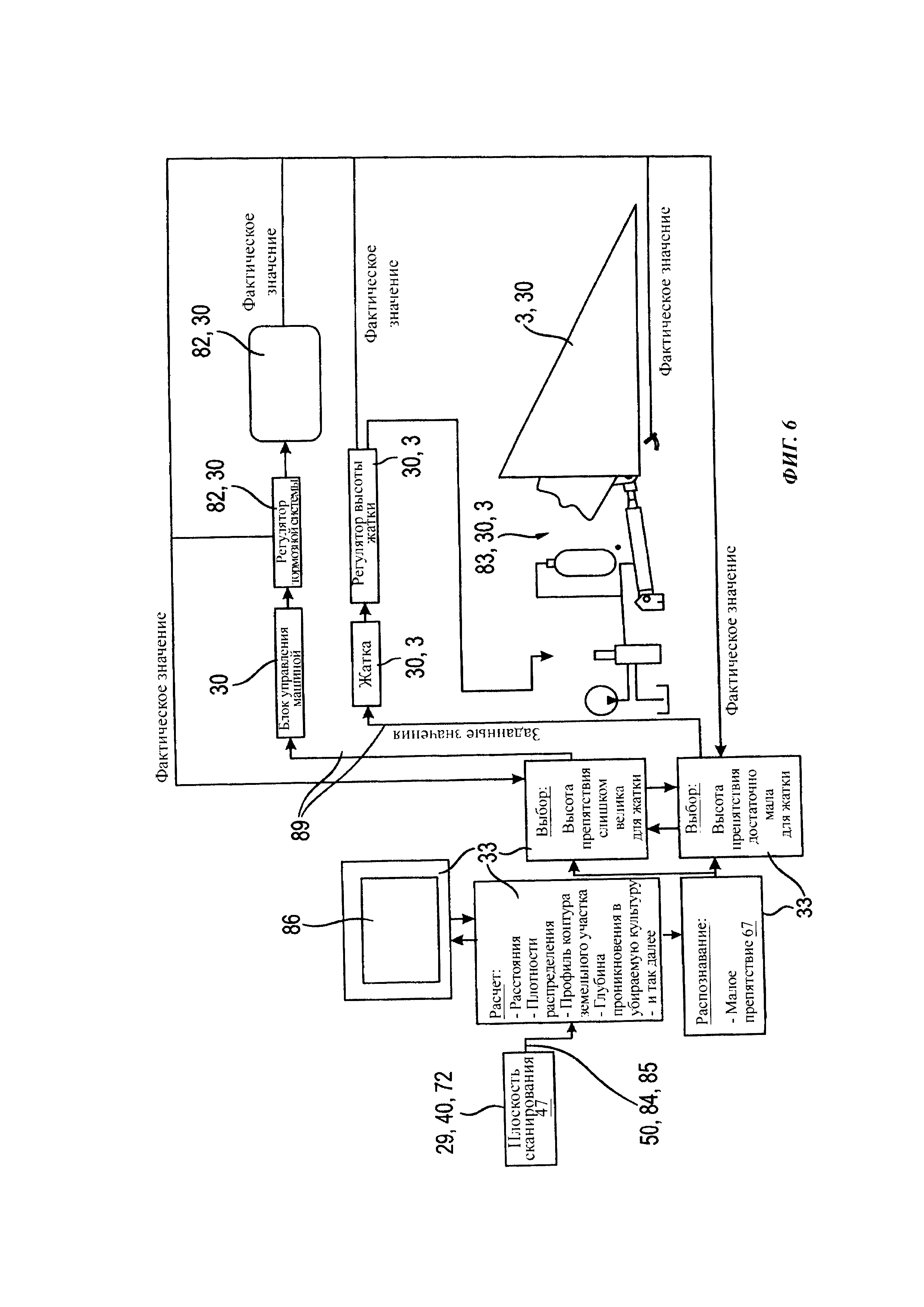
Фигура 6: схема регулирования и управления на примере малого препятствия.
Осуществление изобретения
На фигурах 1-4 изображена сельскохозяйственная рабочая машина, выполненная в виде самоходного зерноуборочного комбайна. Согласно изобретению, сельскохозяйственная рабочая машина может быть также выполнена в виде другой самоходной уборочной машины, в том числе, кормоуборочного комбайна или тягача, например, трактора.
В передней части сельскохозяйственной рабочей машины 1, схематично показанной на фигуре 1 и выполненной в виде зерноуборочного комбайна 2, установлена жатка 3, состоящая из ножевого бруса 4, мотовила 5 и подающего шнека 6. Жатка 3 известным образом соединена с наклонным транспортером 7 зерноуборочного комбайна 2. Растения срезаются ножевым брусом 4 и подаются мотовилом 5 на подающий шнек 6. Поток 8 убираемой культуры, передаваемый на наклонный транспортер 7, в верхней задней области наклонного транспортера 7 поступает на расположенный внизу и, по меньшей мере частично, окруженный подбарабаньем 9 ускорительный барабан 10, а затем на, по меньшей мере частично, окруженный подбарабаньем 9 молотильный барабан 11 молотильного аппарата 12 зерноуборочного комбайна 2. Отклоняющий барабан 13, расположенный за молотильным барабаном 11 в молотильном аппарате 12, отклоняет поток 8 убираемой культуры, выходящий из задней части молотильного аппарата 12 таким образом, что он попадает непосредственно на выполненный в виде клавишного соломотряса 14 сепарирующий блок 15. Поток 8 убираемой культуры направляют на вращающийся клавишный соломотряс 14 таким образом, чтобы подвижные зерна 16, содержащиеся в потоке 8 убираемой культуры, оседали в нижнюю часть клавишного соломотряса 14. Зерна 16, осевшие на подбарабанье 9 и клавишном соломотрясе 14, через обратную транспортную доску 17 и подготовительную транспортную доску 18 попадают на блок 22 очистки, состоящий из нескольких плоскостей 19, 20 решета и вентилятора 21. После этого поток очищенного зерна по зерновому шнеку 23 и элеватору 24 поступает в зерновой бункер 25. Зерновой бункер 25 можно опорожнять посредством трубы 27 для опорожнения зернового бункера. При этом труба 27 для опорожнения зернового бункера и жатка 3 представляют собой навесное оборудование 28, выходящее за габариты собственно сельскохозяйственной рабочей машины.
На краю 26 крыши кабины расположено устройство 29 детектирования окружающего пространства, выполненное в виде сканера 72 или, точнее говоря, лазерного сканера 40. В дальнейшем рабочие органы 36, в частности ножевой брус 4, мотовило 5, ускорительный барабан 10 и т.п., и состоящие из них узлы, в частности жатка 3, молотильный аппарат 12, сепарирующий блок 15, блок 22 очистки и т.п. будут называться функциональными элементами 30 сельскохозяйственной рабочей машины 1. Функциональный элемент 30 содержит электронные и механические компоненты рабочего органа 36 и/или группу рабочих органов. Таким образом, функциональные элементы 30 можно расположить в иерархическом порядке, то есть по группам и их составляющим. Например, для зерноуборочного комбайна 2 иерархия выглядит следующим образом:
- блок управления рабочей машиной: гидравлическая система 80 рулевого управления, гидравлическая тормозная система 82, приводная система 81, вариатор;
- жатка 3: мотовило 5, ножевой брус 4;
- молотильный аппарат 12: ускорительный барабан 10, молотильный барабан 11, подбарабанье 9, отклоняющий барабан 13;
- сепарирующий блок 15: система соломотрясов, вращающаяся система сепарирования, обратная транспортная доска 17;
- блок 22 очистки: плоскости 19, 20 решета; вентилятор 21.
Список групп и составляющих функциональных элементов 30 не является исчерпывающим и приведен лишь для примера. То же самое справедливо для других сельскохозяйственных рабочих машин 1.
Кроме того, сельскохозяйственная рабочая машина 1 содержит кабину 31, в которой расположено по меньшей мере одно управляющее и регулирующее устройство 33 с блоком 32 отображения, посредством которого автоматически или по команде оператора 34 сельскохозяйственной рабочей машины 1 можно управлять множеством функциональных элементов 30 ниже описанным образом. Управляющее и регулирующее устройство 33 посредством так называемой системы 35 шин известным образом обменивается данными с устройством 29 детектирования окружающего пространства и разнообразными системами 74 датчиков в функциональных элементах 30. Сведения о структуре большинства систем 74 датчиков в функциональных элементах 30 подробно описаны в патентном документе DE 10147733, содержание которого в полном объеме входит в описание настоящей патентной заявки. Поэтому в дальнейшем структура систем 74 датчиков в функциональных элементах 30 не будет описана повторно.
На фигуре 2 с высоты птичьего полета показана сельскохозяйственная рабочая машина 1, выполненная в виде зерноуборочного комбайна 2, с выполненным в виде лазерного сканера 40 устройством 29 детектирования окружающего пространства. В этом примере осуществления лазерный сканер 40 установлен по центру переднего края 26 кабины сельскохозяйственной рабочей машины 1, которую согласно изобретению направляют вдоль края 41 посевов посредством нескольких плоскостей 43 сканирования, в данном случае, четырех плоскостей 46, 47, 48, 49 сканирования. Кроме того, показано окружающее пространство 44, зонально просканированное лазерным сканером 40, которое в данном примере осуществления содержит четыре плоскости 46-49 сканирования. Сигналы 42 детектирования окружающего пространства образованы электромагнитными волнами, в показанном примере осуществления лазерными лучами 73, отражающимися от признака 45 земельного участка, препятствия 65 или объекта 51. В качестве устройства 29 детектирования окружающего пространства можно использовать, в том числе, лидары, лазерные сканеры 40 или радары.
Измеренные физические характеристики сигнала 42 детектирования окружающего пространства согласно изобретению помимо времени прохождения импульса могут содержать амплитуду, частоту и фазу. При использовании метода времени прохождения импульса устройство 29 детектирования окружающего пространства излучает световые импульсы и измеряет время, необходимое свету для возвращения после отражения от признака 45 земельного участка, препятствия 65 или объекта 51. На основании указанного необходимого времени можно рассчитать соответствующее расстояние. Под плотностью распределения понимают производную величину, полученную на основании объема пустот между растениями. Этот объем пустот приводит к различным отклонениям измеренного расстояния в соответствии с определенным образцом. В то время как плотность распределения массивных объектов 51, массивных препятствий 65 и массивных признаков 45 земельного участка равна или близка к единице, плотность распределения убираемой культуры лежит между нулем и значением существенно меньше единицы. Для вычисления расстояния используют известный и поэтому не описываемый подробнее метод времени прохождения импульса. Также возможно использование метода времени прохождения фазы или частоты, а для малых расстояний - метод триангуляции. Согласно изобретению, устройство 29 детектирования окружающего пространства может содержать один или несколько излучающих и детектирующих блоков. Сканирование отдельных плоскостей 43 сканирования осуществляют посредством известных механизмов регулировки сигналов 42 детектирования окружающего пространства. В предпочтительном варианте осуществления для изменения направления сигналов 42 детектирования окружающего пространства применяют поворотные зеркала. В следующем предпочтительном варианте осуществления устройство 29 детектирования окружающего пространства повернуто. Сканирование можно выполнять непрерывно или дискретно, в виде точечных измерений. В предпочтительном варианте осуществления плоскости 43 сканирования сканируют в виде быстро следующих друг за другом точечных измерений, то есть квази-непрерывно. Согласно изобретению зонально просканированное окружающее пространство 44 представляет собой расположенный в направлении 52 движения, раскрывающийся на угол (В) раскрытия сканера и расходящийся от сельскохозяйственной рабочей машины 1 трехсторонний участок 53 возделываемого сельскохозяйственного угодья 54. При этом возделываемое сельскохозяйственное угодье 54 отделено границей 55 от примыкающих угодий 56 и может содержать прилегающие канавы, границу произрастания деревьев или другие ограничивающие признаки 45 земельного участка, препятствия 65 и/или объекты 51. Под признаком 45 земельного участка понимают любые поддающиеся детектированию признаки окружающего пространства 58, выступающие, по существу, над плоским грунтом 57 и соединенные с ним естественным путем или образованные этим грунтом. К таким признакам относят растения, канавы, насыпи, колейности, жнивье, края 41 посевов и высота 90 посевов. Под объектом 51 понимают любые иные поддающиеся детектированию признаки окружающего пространства 58, выступающие, по существу, над плоским грунтом 57. К ним относятся камни, животные, люди, телеграфные столбы и опоры ЛЭП, другие транспортные средства, валки и срезанная убираемая культура. Зонально просканированное окружающее пространство 44 устройства 29 детектирования окружающего пространства можно разделить на ближнюю зону 37, среднюю зону 38 и дальнюю зону 39, причем, согласно изобретению, зоне 37, 38, 39 может быть сопоставлена одна или несколько плоскостей 43 сканирования или не сопоставлена ни одна. Ближняя зона 37 содержит плоскость 46 сканирования, максимально приближенную к жатке 3. Дальняя зона 39 содержит плоскость 47 сканирования, максимально удаленную от жатки 3. Средняя зона 38, которую при необходимости и в зависимости от количества плоскостей сканирования можно также разделить на несколько зон, содержит плоскости 48, 49 сканирования, расположенные между ближней зоной 37 и дальней зоной 39. При этом плоскость 43 сканирования может представлять собой многократное точечное сканирование на воображаемой линии между сторонами трехстороннего участка 53 зонально просканированного окружающего пространства 44. При этом под плоскостью сканирования понимают геометрическую плоскость. Если отдельные лучи многократного точечного сканирования в плоскости сканирования, не встречая препятствий на пути прохождения лучей, достигают плоского и не имеющего уклона грунта, то в результате получают профиль плоскости сканирования. Профиль плоскости 43 сканирования может быть расположен перпендикулярно направлению 52 движения или в области перехода к параллельной ориентации относительно направления 52 движения. При этом плоскости сканирования могут быть расположены параллельно на некотором удалении друг от друга или пересекаться друг с другом. Сканирование производят по меньшей мере в двух плоскостях 43 сканирования. В предпочтительном варианте осуществления сканирование производят в четырех параллельных отстоящих друг от друга плоскостях 43 сканирования, перпендикулярных направлению 52 движения.
При этом результирующие сигналы, полученные от устройства детектирования окружающего пространства, содержат информацию о расстояниях, плотности распределения, положении края посевов, высоте посевов, профиле изменения высоты посевов и/или профиле края посевов, плотности посевов, профиле изменения плотности посевов, глубине проникновения в убираемую культуру и/или иных подобных характеристиках, которые в дальнейшем обрабатывают посредством управляющего и регулирующего устройства 33 и связывают друг с другом.
Согласно изобретению, каждой плоскости 43 сканирования сопоставлен один или несколько функциональных элементов 30 или не сопоставлен ни один функциональный элемент. Благодаря тому, что каждый функциональный элемент 30 содержит один или несколько рабочих органов 36 сельскохозяйственной рабочей машины 1, можно автоматизировать рабочие процессы.
Кроме того, изобретение предусматривает способ, согласно которому управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования ведет сельскохозяйственную рабочую машину 1 вдоль края 41 посевов убираемой культуры 64, причем управляющее и регулирующее устройство 33 может иметь доступ по меньшей мере к двум, предпочтительно ко всем, плоскостям 43 сканирования для раннего и точного управления соответствующими функциональными элементами 30. При этом сельскохозяйственная рабочая машина 1 известным образом автоматически тормозит, ускоряет свой ход и/или поворачивает посредством подачи управляющих сигналов 89 на функциональные элементы 30: гидравлическую систему 80 рулевого управления, гидравлическую тормозную систему 82 и приводную систему 81. Край посевов представляет собой переход между неубранной зерновой культурой 68 и жнивьем 69 или границу 55 возделываемого сельскохозяйственного угодья 54.
Кроме того, согласно предусматриваемому изобретением способу управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования ориентирует мотовило 5 сельскохозяйственной рабочей машины 1 в зависимости от высоты 90 посевов убираемой культуры 64, иными словами, по верхнему краю зерновой культуры 68, причем высоту функционального элемента мотовило 5 известным образом автоматически выставляют посредством управляющих сигналов 89 управляющего и регулирующего устройства 33. При этом управляющее и регулирующее устройство 33 может иметь доступ по меньшей мере к двум, предпочтительно ко всем, плоскостям 43 сканирования для раннего и точного управления соответствующим функциональным элементом 30.
В следующем предпочтительном варианте способа использование нескольких или всех плоскостей 43 сканирования позволяет частично смоделировать спутниковую навигацию. Таким образом, в приведенном примере осуществления при следовании вдоль валка, технологической колеи или других признаков полосы движения в любой момент t времени можно построить на основании всех четырех плоскостей 43 сканирования четыре виртуальные метки перед сельскохозяйственной рабочей машиной 1 на цифровой карте, которые впоследствии будут пройдены сельскохозяйственной рабочей машиной 1. Под признаками полосы движения понимают признаки 45 земельного участка, которые могут служить ориентирами для ведения сельскохозяйственной рабочей машины 1. Таким образом, признаки полосы движения содержат, в том числе, борозды или насыпи, предпочтительно технологические колеи и валки.
На фигуре 3 представлен вид сбоку на сельскохозяйственную рабочую машину 1, выполненную в виде зерноуборочного комбайна 2, с установленным на краю 26 крыши кабины лазерным сканером 40, сканирующим область перед машиной четырьмя расходящимися лазерными лучами 60-63 в четырех отстоящих друг от друга плоскостях 46, 47, 48, 49. При этом путь луча сигналов 42 детектирования окружающего пространства сделан видимым. На фигуре изображены изменяющиеся признаки 45 земельного участка и препятствия 65, попадающие или попавшие в отстоящие друг от друга плоскости 43 сканирования. Плоскости 43 сканирования схематично изображены пунктирными линиями. Кроме того, угол а сканирования земельного участка показан в качестве примера для плоскости 63 сканирования. Устройство 29 детектирования окружающего пространства может быть установлено на сельскохозяйственной рабочей машине 1 или внутри нее. Оно ориентировано в направлении 52 движения и наклонено к земле. Предпочтительно, устройство 29 детектирования окружающего пространства расположено по центру между левой и правой стороной сельскохозяйственной рабочей машины 1 на возвышении, предпочтительно снаружи на крыше 59 кабины или в кабине 31 машины, предпочтительно на переднем крае 26 крыши кабины. Установка на возвышении позволяет регулировать спадающий угол а сканирования земельного участка между сигналами 42 детектирования окружающего пространства и грунтом 57, объектом 51, препятствием 65 и/или признаком 45 земельного участка.
Различные углы α сканирования четырех лазерных лучей 60-63 позволяют распознавать признаки 45 земельного участка, препятствия 65 и/или объекты 51 различной высоты. При этом лазерный луч 63 при максимальном угле а сканирования земельного участка, соответствующем плоскостям 43 сканирования ближней зоны, глубже всего проникает в убираемую культуру 64 и определяет признаки 45 земельного участка, препятствия 65 и/или объекты 51, высота которых существенно ниже высоты 90 посевов. Для определения признаков 45 земельного участка, препятствий 65 и/или объектов 51, высота которых превышает высоту 90 посевов, используют лазерные лучи 60, 61 с меньшим углом а сканирования земельного участка и большей дальностью действия, то есть плоскости 43 сканирования дальней зоны 39 и/или средней зоны 38. Таким образом, в любой момент t времени предоставлена информация об окружающем пространстве одновременно в различных зонах 37, 38, 39 удаления и/или на различной глубине 70 проникновения лазерных лучей 73 в убираемую культуру.
В следующем варианте способа согласно изобретению управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 ближней плоскости 46 сканирования осуществляет краткосрочное точное управление, а на основании результирующих сигналов 50 дальней плоскости 47 сканирования - раннее грубое предварительное управление функциональными элементами 30. Это управление осуществляют посредством подачи управляющим и регулирующим устройством 33 сигналов рулевого управления и/или управляющих сигналов 89 на функциональные элементы 30. Например, мотовило 5 можно переместить в подходящую пограничную область оптимального диапазона высот еще до достижения перепада высоты 90 посевов, благодаря чему необходимая коррекция высоты при достижении перепада высот будет минимальной.
В следующем варианте способа согласно изобретению управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования предотвращает столкновение с препятствиями 65, причем сельскохозяйственная рабочая машина 1 известным образом автоматически тормозит, поворачивает и/или отводит жатку 3 посредством подачи управляющих сигналов 89 на функциональные элементы 30. При этом управляющее и регулирующее устройство 33 может иметь доступ по меньшей мере к двум, предпочтительно ко всем, плоскостям 43 сканирования.
В этом случае под препятствиями 65 понимают неподвижные и подвижные признаки 45 земельного участка и объекты 51, способные повредить сельскохозяйственную рабочую машину 1 или загрязнить убранную культуру. К ним относят деревья, стволы деревьев, скалы, камни, здания, выступающие канализационные шахты, животные и т.п.
В особенно предпочтительном варианте осуществления изобретения результирующие сигналы 50 плоскости 47 сканирования дальней зоны 39 анализируют посредством управляющего и регулирующего устройства 33 для распознавания больших препятствий 66, причем это устройство в зависимости от скорости сельскохозяйственной рабочей машины 1 допускает объезд большого препятствия 66. При этом управляющее и регулирующее устройство 33 посредством сигналов рулевого управления и/или управляющих сигналов 89 управляет функциональными элементами 30: гидравлической системой 80 рулевого управления, гидравлической тормозной системой 82 и приводной системой 81, и своевременно направляет сельскохозяйственную рабочую машину 1 вокруг большого препятствия 66. Под большим препятствием 66 понимают, как правило, объемные и/или высокие препятствия 65, например, дома, телеграфные и телефонные столбы или деревья, предпочтительно, превышающие высоту посевов.
В отношении малых препятствий 67 управляющее и регулирующее устройство 33 анализирует предпочтительно результирующие сигналы 50 ближней плоскости 46 сканирования и подает сигналы рулевого управления и/или управляющие сигналы 89, которые в зависимости от высоты препятствия приводят к подъему функционального элемента 30 жатка 3 или к немедленной остановке сельскохозяйственной рабочей машины 1 посредством управления функциональными элементами 30: гидравлической тормозной системой 82 и приводной системой 81. Под малыми препятствиями 67 в данном случае среди прочего понимают камни, животных, поваленные стволы деревьев или выступающие канализационные шахты, расположенные ниже высоты 90 посевов или не могущие быть достоверно распознанными в ходе предыдущего сканирования.
При необходимости результирующие сигналы 50 плоскостей 48, 49 сканирования средней зоны 38 могут быть использованы управляющим и регулирующим устройством 33 для обоих сценариев.
В следующем варианте способа согласно изобретению управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования может распознать путь для ведения машины и автоматически вести сельскохозяйственную рабочую машину 1 по этому пути посредством подачи сигналов рулевого управления и/или управляющих сигналов 89 на функциональные элементы 30. При этом управляющее и регулирующее устройство 33 может иметь доступ к данным по меньшей мере двух, предпочтительно всех, плоскостей 43 сканирования для раннего и точного ведения сельскохозяйственной рабочей машины 1 по пути посредством управления функциональными элементами 30: гидравлической системой 80 рулевого управления, приводной системой 81 и/или гидравлической тормозной системой 82. Для распознавания пути можно использовать любые признаки полосы движения. Под признаками полосы движения в данном случае понимают признаки 45 земельного участка, которые могут служить ориентирами для ведения сельскохозяйственной рабочей машины 1. Таким образом, признаки полосы движения содержат, в том числе, борозды или насыпи, предпочтительно, технологические колеи и валки.
В следующем варианте способа согласно изобретению управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования может рассчитать высоту посевов и автоматически адаптировать функциональные элементы 30 жатки 3 посредством сигналов рулевого управления и/или управляющих сигналов 89. При этом управляющее и регулирующее устройство 33 может получить доступ к данным всех плоскостей 43 сканирования, однако предпочтительно к данным ближних плоскостей 43 сканирования, чтобы заранее и/или точно адаптировать мотовило 5 и ножевой брус 4 к высоте посевов посредством управления подъемным гидравлическим механизмом.
В следующем варианте способа согласно изобретению управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования может рассчитать ожидаемую урожайность и автоматически адаптировать функциональные элементы 30 в соответствии с ожидаемой урожайностью посредством сигналов рулевого управления и/или управляющих сигналов 89. При этом управляющее и регулирующее устройство 33 может получить доступ к данным нескольких, предпочтительно ближних, плоскостей 43 сканирования, чтобы автоматически, заранее и точно адаптировать сельскохозяйственную рабочую машину 1 путем регулирования мощности функциональных элементов 30: приводной системы 81, наклонного транспортера 7, молотильного или измельчающего аппарата 12, сепарирующего блока 15 и/или блока 22 очистки. Для примера можно упомянуть управление приводом наклонного транспортера, приводом молотильного барабана и приводом соломотряса.
На фигуре 4 представлен аналогичный фигуре 3 вид сбоку на сельскохозяйственную рабочую машину 1, выполненную в виде зерноуборочного комбайна 2, с установленным на крыше 59 кабины лазерным сканером 40. Отличие на данной фигуре состоит в распознавании конца поля. При этом конец 71 поля проходит через часть отстоящих друг от друга плоскостей 43 сканирования. Плоскости 43 сканирования схематично изображены штрихпунктирными линиями. В способе согласно изобретению управляющее и регулирующее устройство 33 на основании результирующих сигналов 50 плоскостей 43 сканирования способно автоматически распознавать конец 71 поля, автоматически выводить сельскохозяйственную рабочую машину 1 с пути (а при необходимости направлять на следующий путь) и/или отводить жатку 3 посредством подачи сигналов рулевого управления и/или управляющих сигналов 89 на функциональные элементы 30. При этом управляющее и регулирующее устройство 33 может получить доступ к данным по меньшей мере двух, в данном примере плоскостей 47 и 48 сканирования, предпочтительно всех, плоскостей 43 сканирования, чтобы заранее и точно выводить сельскохозяйственную рабочую машину 1 с пути и направлять на путь посредством управления функциональными элементами 30: гидравлической системой 80 рулевым управлением, приводной системой 81 и гидравлической тормозной системой 82. Кроме того, жатку 3 в конце 71 поля автоматически переводят гидравлическим подъемным механизмом в поднятое безопасное положение и опускают обратно в рабочее положение в начале следующего пути. При этом под концом 71 поля понимают расположенный в направлении движения переход от убираемой культуры 64 к жнивью 69, край поля, конец валка или другие изменения признака земельного участка или объекта, требующие изменения направления движения для продолжения сбора урожая, не связанного с обнаруженным препятствием. Под путем можно понимать технологическую колею, путь вдоль валка, края посевов и т.п.
Пример управления и регулирования функциональных элементов 30 и возможной связи плоскостей 43 сканирования с функциональными элементами 30 детально показан для случая обнаружения препятствия в примерах осуществления согласно фигурам 5 и 6. Согласно изобретению для целей, отличных от указанных, например ведения по полосе, ведения вдоль края посевов, ведение вдоль валка, автоматизации действий в конце поля, отслеживания объекта, существует адаптированное управление.
На фигуре 5 изображены в качестве примера средства автоматического управления зерноуборочным комбайном 2 в случае встречи с большим препятствием 66, например с выступающими над убираемой культурой деревьями или телеграфными столбами, посредством регулирования функциональных элементов 30 на основании результирующих сигналов 50 плоскостей 43 сканирования дальней зоны 39. Устройство 29 детектирования окружающего пространства передает результирующие сигналы 50, содержащие информацию 84 о расстоянии и/или информацию 85 о плотности распределения, полученную на основании сигналов 42 детектирования окружающего пространства плоскостей 43 сканирования, на управляющее и регулирующее устройство 33 сельскохозяйственной рабочей машины 1. В показанном примере результирующие сигналы 50 плоскости 47 сканирования дальней зоны 39 передают на управляющее и регулирующее устройство 33. Управляющее и регулирующее устройство 33 вычисляет расстояния, плотности распределения, профиль 87 контура земельного участка и профиль 88 изменения плотности посевов на основании результирующих сигналов 50 устройства 29 детектирования окружающего пространства и по определенному алгоритму распознает признаки 45 земельного участка, препятствия 65 и объекты 51. После обнаружения управляющим и регулирующим устройством 33 большого препятствия 66 и определения его ширины, а также вычисления фактических значений скорости движения машины, угла поворота колес и близости препятствия, по реализованному алгоритму регулирования рассчитывают необходимый угол поворота колес и требуемую скорость, определяют маневр уклонения и передают сигналы рулевого управления и/или управляющие сигналы 89 на функциональные элементы 30: гидравлическую систему 80 рулевого управления и приводную систему 81, а точнее, на рулевой регулятор и регулятор скорости, активизирующие механические компоненты функциональных элементов 30 в соответствии с реализованным алгоритмом регулирования. Регулятор скорости гидростатического привода приводной системы 81 уменьшает мощность гидравлического насоса, в результате чего гидромоторы работают со сниженной частотой вращения. Следовательно, сельскохозяйственная рабочая машина 1 замедляет свой ход. Рулевой регулятор в гидравлической системе 80 рулевого управления открывает клапаны в насосе системы управления, в результате чего увеличивают количество масла, подаваемого в рулевой цилиндр, и изменяют угол поворота колес. Следовательно, сельскохозяйственная рабочая машина 1 выполняет предварительно определенный маневр уклонения. При этом определенный маневр уклонения непрерывно корректируют на основании результирующих сигналов 50 устройства 29 детектирования окружающего пространства и его плоскостей 43 сканирования. После объезда большого препятствия 66 машина автоматически возвращается на предыдущую полосу движения и возобновляет процесс уборки урожая.
Путем сохранения и/или наложения информации 84 о расстоянии и/или информации 85 о плотности распределения управляющее и регулирующее устройство 33 может рассчитать профиль 87 контура земельного участка и/или профиль 88 изменения плотности посевов и составить цифровую карту 86 возделываемого сельскохозяйственного угодья 54.
Управляющее и регулирующее устройство 33 может быть выполнено в виде компьютера и содержать следующие элементы: компьютер или другой анализирующий блок, устройства ввода (например, сенсорный экран, кнопки, переключатели и/или поворотный ручки), блоки 32 отображения (дисплей), сеть передачи данных (например, CAN-BUS), программы, модули управления и регулирования (например, непосредственно связанные с функциональными элементами 30).
На фигуре 6 изображены в качестве примера средства автоматического управления зерноуборочным комбайном 2 в случае встречи с малым препятствием 67, например выступающей крышкой канализационного люка или камнем, посредством регулирования функциональных элементов 30 на основании результирующих сигналов 50 плоскостей 43 сканирования ближней зоны 37. Управляющее и регулирующее устройство 33 получает результирующие сигналы 50 ближайшей плоскости 46 сканирования, вычисляет расстояния, плотности распределения, профиль 87 контура земельного участка и профиль 88 изменения плотности посевов, и посредством алгоритма распознает объект 51 в качестве близкого и малого препятствия 67. На основании реализованного алгоритма регулирования, учитывающего скорость машины, высоту препятствия, высоту жатки и/или близость к препятствию, а также на основании фактических значений высоты жатки и скорости машины управляющее и регулирующее устройство 33 выбирает аварийную остановку или подъем жатки и передает заданные значения посредством сигналов рулевого управления и/или управляющих сигналов 89 на функциональные элементы 30: гидравлическую тормозную систему 82 и/или жатку 3. Так, выбор аварийной остановки приводит, в частности, к активизации регулятора гидравлической тормозной системы 82, открывающего клапан рабочего тормоза и увеличивающего давление на тормозной поршень. Машину затормаживают. Выбор подъема жатки приводит, в частности, к активизации регулятора функционального элемента 30 (гидравлического механизма 83 подъема жатки), открывающего гидравлический клапан и заполняющего маслом гидравлические цилиндры. В результате жатку 3 поднимают на безопасную высоту, исключающую контакт с малым препятствием.
Представленные на фигурах примеры осуществления не являются исчерпывающими и носят исключительно иллюстративный характер. То же самое относится к сельскохозяйственным рабочим машинам с другими приводами, системами рулевого управления и механизмами коррекции функциональных элементов. В частности, такое действие, как например уклонение от большого препятствия, может быть выполнено посредством других или дополнительных функциональных элементов по сравнению с упомянутыми в описываемом примере осуществления.
СПИСОК ОБОЗНАЧЕНИЙ
1 сельскохозяйственная рабочая машина
2 зерноуборочный комбайн
3 жатка
4 ножевой брус
5 мотовило
6 подающий шнек
7 наклонный транспортер
8 поток убираемой культуры
9 подбарабанье
10 ускорительный барабан
11 молотильный барабан
12 молотильный аппарат
13 отклоняющий барабан
14 клавишный соломотряс
15 сепарирующий блок
16 зерна
17 обратная транспортная доска
18 подготовительная транспортная доска
19 плоскость решета
20 плоскость решета
21 вентилятор
22 блок очистки
23 зерновой шнек
24 элеватор
25 зерновой бункер
26 край крыши кабины
27 труба для опорожнения зернового бункера
28 навесное оборудование
29 устройство детектирования окружающего пространства
30 функциональные элементы
31 кабина машины
32 блок отображения
33 управляющее и регулирующее устройство
34 оператор
35 система шин
36 рабочий орган
37 ближняя зона
38 средняя зона
39 дальняя зона
40 лазерный сканер
41 край посевов
42 сигналы детектирования окружающего пространства
43 плоскости сканирования
44 зонально просканированное окружающее пространство
45 признак земельного участка
46 плоскость сканирования 4
47 плоскость сканирования 1
48 плоскость сканирования 2
49 плоскость сканирования 3
50 результирующие сигналы
51 объект
52 направление движения
53 трехсторонний участок
54 возделываемое сельскохозяйственное угодье
55 граница
56 примыкающее угодье
57 грунт
58 окружающее пространство
59 крыша кабины
60 лазерный луч плоскости сканирования 1
61 лазерный луч плоскости сканирования 2
62 лазерный луч плоскости сканирования 3
63 лазерный луч плоскости сканирования 4
64 убираемая культура
65 препятствие
66 большое препятствие
67 малое препятствие
68 зерновая культура
69 жнивье
70 глубина проникновения в убираемую культуру
71 конец поля
72 сканер
73 лазерный луч
74 система датчиков в функциональном элементе
80 гидравлическая система рулевого управления
81 приводная система
82 гидравлическая тормозная система
83 гидравлический механизм подъема жатки
84 информация о расстоянии
85 информация о плотности распределения
86 цифровая карта
89 сигналы рулевого управления и/или управляющие сигналы
90 высота посевов
α угол сканирования земельного участка
β угол раскрытия сканера
Реферат
Изобретение относится к сельскохозяйственной рабочей машине, содержащей устройство детектирования окружающего пространства для зонального сканирования окружающего пространства и один или несколько управляемых функциональных элементов. Устройство детектирования окружающего пространства генерирует сигналы детектирования окружающего пространства, которые могут быть обработаны управляющим и регулирующим устройством сельскохозяйственной рабочей машины. Устройство детектирования окружающего пространства выполнено в виде сканера, сканирующего окружающее пространство в плоскостях сканирования. Каждой плоскости сканирования сопоставлено управление функциональными элементами. Изобретение обеспечивает повышение точности автоматического управления. 14 з.п. ф-лы, 6 ил.
Комментарии