Способ и устройство для преобразования сигналов в сельскохозяйственной машине - RU2374803C2
Код документа: RU2374803C2
Чертежи
Описание
Область техники
Изобретение относится к способу и устройству для преобразования по-разному структурированных сигналов различных навигационных систем для автоматического наведения устройства управления сельскохозяйственной рабочей машины.
Уровень техники
Разные навигационные системы для сельскохозяйственных машин предлагаются различными изготовителями. Эти навигационные системы частично встраиваются в сельскохозяйственную рабочую машину как неотъемлемая составная часть. С другой стороны не все сельскохозяйственные машины оборудованы навигационными системами. Это в особенности относится к более старым моделям. Поэтому существует практическая потребность оснащать сельскохозяйственные машины, не имеющие навигационной системы, такими системами по свободному выбору, а также дополнять уже имеющиеся в сельскохозяйственных машинах навигационные системы другими навигационными системами для повышения точности наведения.
В ЕР 1266553 А2 описано устройство для автоматического управления движением сельскохозяйственной рабочей машины с управляющим устройством, на которое подаются первый сигнал положения и второй сигнал положения, а также информация о заданном значении пути, которая определяет пройденный путь. К тому же из первого и второго сигнала положения делается выбор, который определяет наиболее точный сигнал. На основании полученных данных происходит автоматическое управление движением сельскохозяйственной рабочей машины.
Для одного сигнала положения используются сигналы спутников Глобальной Системы Позиционирования GPS. Другой сигнал положения образуется путем применения лазерных сканирующих датчиков. Лазерные сканирующие датчики определяют относительное положение кромки массива убираемого продукта и в соответствии с этим ориентируют сельскохозяйственную машину. Эти способ и устройство приняты в качестве прототипа заявляемого изобретения.
Однако описанное в ЕР 1266553 А2 устройство для автоматического управления движением сельскохозяйственной рабочей машины предполагает наличие, по меньшей мере, двух навигационных систем. Недостатком при этом являются в первую очередь большие расходы, которые придется понести покупателю этих двух различных систем. Особенно дорогостоящей является навигационная система, базирующаяся на системе GPS. К тому же отсутствует возможность сочетания более старых систем с этим устройством управления, так что описанная система не может найти применение на более старых моделях сельскохозяйственных машин. Модернизация существующих систем возможна только путем полной замены и установки необходимого программного обеспечения. Такая дорогостоящая модернизация требует, по меньшей мере, переделки имеющегося устройства управления на всех модернизируемых машинах.
Раскрытие изобретения
Поэтому задача предлагаемого изобретения состоит в том, чтобы избежать недостатков уровня техники и обеспечить возможность разностороннего применения различных навигационных систем для автоматического управления движением сельскохозяйственных рабочих машин.
Эта задача согласно изобретению решается отличительными признаками пунктов 1 и 10 формулы изобретения, причем в других пунктах формулы изобретения перечислены признаки, являющиеся полезным развитием этого решения.
Способ преобразования по-разному структурированных сигналов различных навигационных систем для автоматического наведения устройства управления в сельскохозяйственной машине согласно изобретению характеризуется тем, что по-разному структурированные сигналы различных навигационных систем подают на преобразовательное устройство, причем преобразовательное устройство из каждого из этих по-разному структурированных сигналов формирует унифицированный выходной сигнал.
Устройство для преобразования по-разному структурированных сигналов различных навигационных систем для автоматического наведения устройства управления сельскохозяйственной рабочей машины согласно изобретению характеризуется тем, что различные навигационные системы подключены к одному преобразовательному устройству, причем на преобразовательное устройство поступает, по меньшей мере, один по-разному структурированный входной сигнал, и преобразовательное устройство выполнено с возможностью этот, по меньшей мере, один по-разному структурированный входной сигнал преобразовывать в унифицированный выходной сигнал и передавать унифицированный выходной сигнал на уже имеющееся управляющее устройство, причем управляющее устройство выполнено с возможностью воспринимать преобразованный входной сигнал как лежащий в основе управляющего устройства известный управляющий сигнал.
Подключая различные навигационные системы с различным образом структурированными выходными сигналами к отдельному преобразовательному устройству, которое из по-разному структурированных входных сигналов генерирует унифицированный выходной сигнал, можно в равной мере использовать навигационные системы различного исполнения на любых сельскохозяйственных рабочих машинах. Это позволяет встраивать в сельскохозяйственные машины новые навигационные системы без дорогостоящего изменения системы.
Сведение нескольких систем в одно отдельное преобразовательное устройство позволяет к тому же избежать увеличенного расхода на электромонтаж. В особенности снижаются электромагнитные помехи, излучаемые и воспринимаемые проводами. Так как в целом требуется меньше разъемов и соединений, снижается вероятность отказов. Благодаря тому, что требуется меньше проводов, снижаются расходы и достигается экономия места. В рамках изобретения предусматривается обеспечение бесконтактного соединения между системами, преобразовательным устройством и/или устройством управления.
Далее, благодаря преобразовательному устройству, создаются новые возможности сопряжения систем. Так, преобразовательное устройство встраивается в существующую систему и не требует приобретения никаких дополнительных управляющих приборов. Обеспечивается лучшее использование функциональных возможностей, так как водитель сельскохозяйственной рабочей машины всегда имеет возможность выбора самой подходящей для данных условий уборки навигационной системы из нескольких навигационных систем.
Улучшаются также диагностические возможности, так как в рамках изобретения можно предусмотреть, чтобы все подключенные к преобразовательному устройству системы контролировали друг друга и чтобы в случае сбоя одной системы происходило автоматическое переключение на запасную систему.
И, наконец, к преобразовательному устройству могут подключаться другие системы, генерирующие специфические параметры, относящиеся к урожаю и/или к машине. Такие данные, влияющие на управление движением, как, например, наклон машины, могут вводиться в преобразовательное устройство, преобразовываться там и в качестве корректирующих параметров передаваться в устройство управления машины.
Другие полезные реализации являются предметом других зависимых пунктов формулы и ниже рассматриваются подробнее с помощью чертежей.
Краткий перечень чертежей
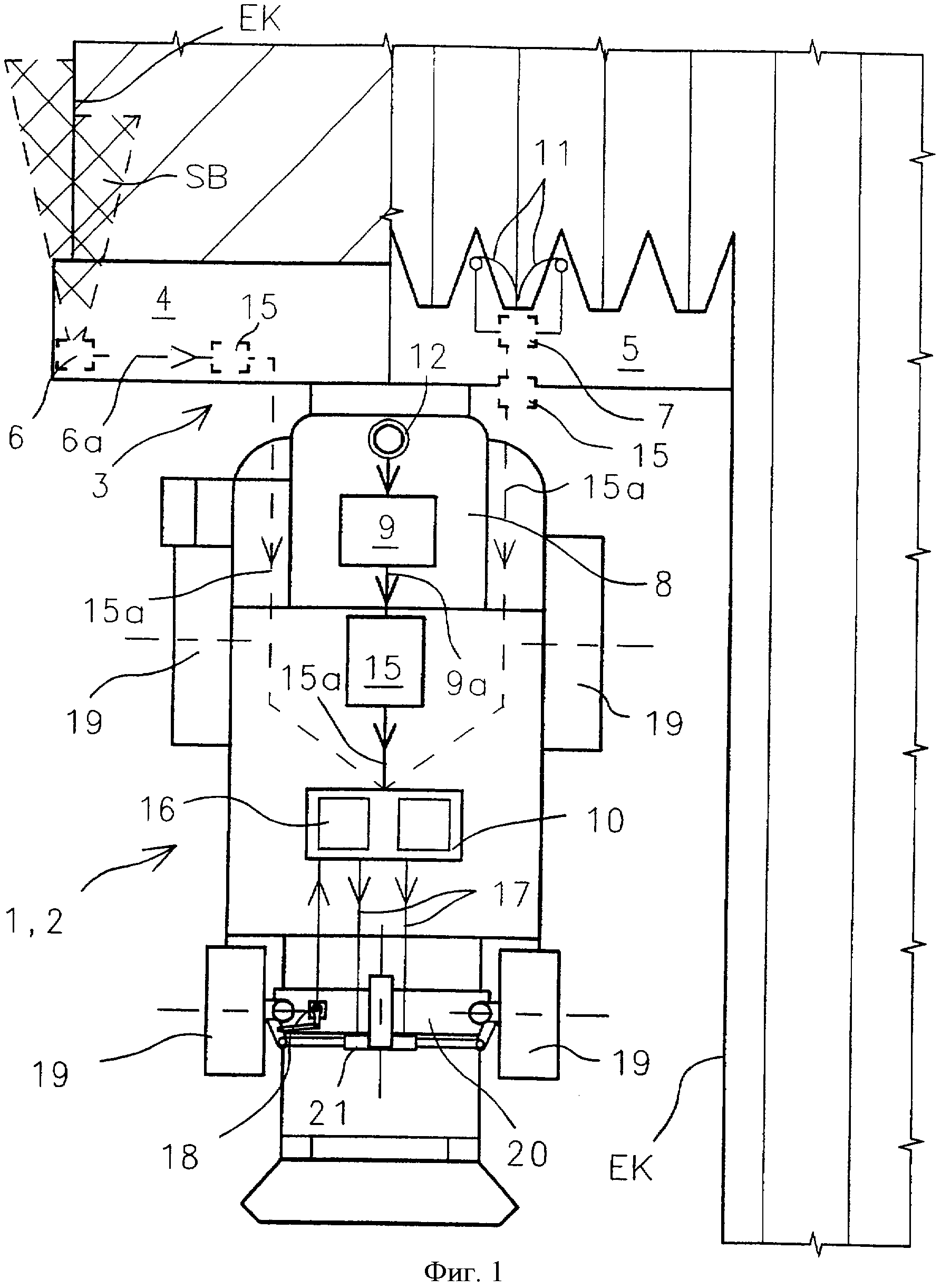
На фиг.1 дано схематическое изображение самоходного зерноуборочного комбайна и предлагаемого изобретением преобразовательного устройства (вид сверху);
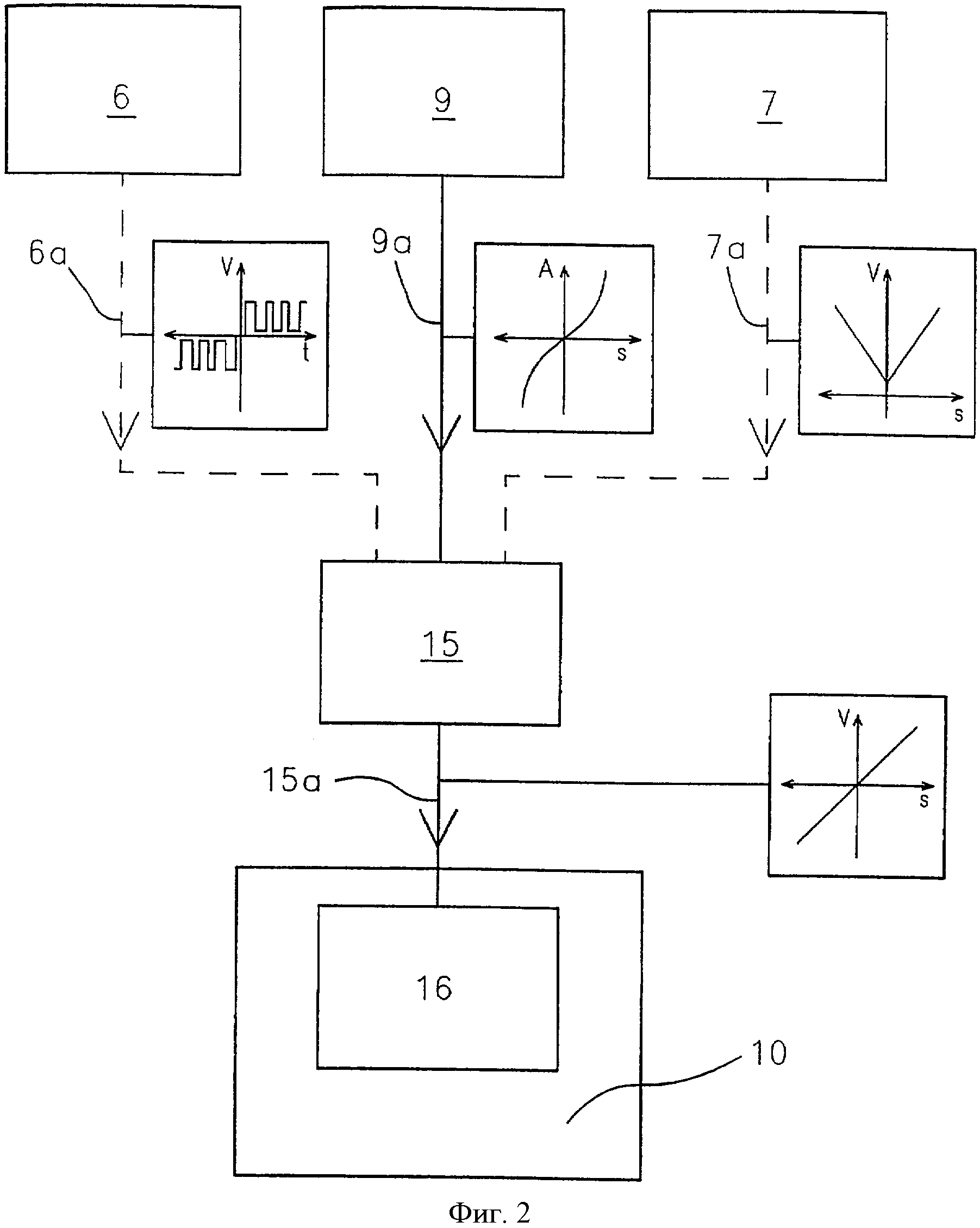
На фиг.2 - блок-схема предлагаемого изобретением способа.
Осуществление изобретения
На фиг.1 схематически изображен вид сверху сельскохозяйственной рабочей машины 1 в виде самоходного зерноуборочного комбайна 2. Установленная спереди на комбайне 2 навеска 3 может представлять собой жатвенный аппарат 4 или кукурузный початкособиратель 5. Применение различных навесок 4, 5 зависит от вида убираемого продукта. На комбайне 2 установлены различные навигационные системы. На жатвенном аппарате 4 схематически изображена общеизвестная лазерная навигационная система 6, на кукурузном початкособирателе 5 - общеизвестный кукурузный щуп 7, а в кабине 8 водителя - управляемая системой GPS встроенная навигационная система 9.
Навигационная система 6 с лазерным управлением сканирует кромку убираемого продукта ЕК. Это осуществляют генерируемые лазерным устройством локационные лучи, которые охватывают область сканирования SB и при этом ощупывают кромку массива убираемого продукта. Для обнаружения кромки массива убираемого продукта ЕК навигационная система 6 с лазерным управлением использует отраженные локационные лучи. На основании полученных данных генерируется сигнал для устройства 10 управления, которое автоматически ориентирует комбайн 2 в зависимости от положения кромки массива убираемого продукта ЕК.
Установленный на кукурузном початкособирателе 5 кукурузный щуп 7 соприкасается с убираемым продуктом и генерирует сигнал для устройства 10 управления, которое направляет комбайн 2 в соответствии с положением находящегося на поле убираемого продукта.
С помощью Глобальной Системы Позиционирования GPS можно вычислить положение комбайна 2 на поле, если известны положение комбайна 2 в данный момент и параметры поля, такие как ширина, длина и расположение конкретного поля. При наличии этих данных определяется положение комбайна 2 на поле и в зависимости от этого вычисляется маршрут, независимо от расположения массива убираемого продукта. Генерируемые GPS сигналы спутников воспринимаются установленной на кабине 8 водителя антенной 12 GPS, которая передает эти входные сигналы дальше, в навигационную систему. На основании фактического положения и заранее запланированного маршрута выдается сигнал на устройство 10 управления, воздействующее через управляющий цилиндр 21 на ось 20 с управляемыми колесами.
Так как эти различные навигационные системы 6, 7, 9 используются на разных сельскохозяйственных машинах или отчасти вовсе не являются составной частью сельскохозяйственной машины, оказалось целесообразным дополнить сельскохозяйственную машину, по меньшей мере, одной, а при уже имеющихся навигационных системах, по меньшей мере, еще одной навигационной системой.
Это дает то преимущество, что какие-либо свойственные той или иной системе недостатки могут быть скомпенсированы дополнительной системой. Так, например, недостаток навигационной системы, зависящей от системы GPS, состоит в том, что наведение происходит независимо от фактически имеющегося массива убираемого продукта. Поэтому система продолжала бы уборочное движение и в том случае, если бы убираемого продукта не было, например, вследствие плохих погодных условий. Далее на работу навигационной системы, зависящей от системы GPS, отрицательно влияют внешние условия окружающей среды, как, например, облачное небо или густые лесонасаждения вблизи поля, затеняющие спутники.
Дополнение этих существующих навигационных систем осуществляется с помощью преобразовательного устройства 15. На вход преобразовательного устройства 15 поступают сигналы соответствующих навигационных систем 6, 7, 9. Из по-разному структурированных входных сигналов 6а, 7а, 9а преобразовательное устройство 15 образует унифицированный выходной сигнал 15а. Этот унифицированный выходной сигнал 15а поступает на устройство 10 управления. В устройстве 10 управления унифицированный входной сигнал 15а обрабатывается вычислительным блоком 16, и вырабатывается выходной сигнал 17 для автоматического управления комбайном 2. Для контроля фактического положения колес может использоваться датчик 18 угла поворота колес, от которого сигнал 19 фактического положения колес поступает в вычислительный блок 16. Преобразовательное устройство 15 может быть придано, как показано пунктиром, одной из навигационных систем 6, 7, 9 или всем навигационным системам 6, 7, 9 одновременно.
На фиг.2 изображена блок-схема предлагаемого изобретением способа.
В качестве не имеющих ограничивающего значения примеров базисных навигационных систем приведены базирующаяся на системе GPS система 9, система с лазерным управлением 6 и механически управляемая щупом навигационная система 7. Разные навигационные системы 6, 7, 9 генерируют различным образом структурированные выходные сигналы 6а, 7а, 9а. Различным образом структурированные выходные сигналы 6а, 7а, 9а изображены схематически на диаграммах 9а, 6а, 7а, отнесенных к соответствующим навигационным системам 6, 7, 9. Согласно изобретению предполагается, что навигационные системы 6, 7, 9 не ограничены имеющимися системами, но могут быть распространены на любое количество навигационных систем.
Различные сигналы 6а, 7а, 9а поступают на предлагаемое изобретением преобразовательное устройство 15. Преобразовательное устройство 15 обрабатывает по-разному структурированные входные сигналы 9а, 6а, 7а и вырабатывает из по-разному структурированных входных сигналов 9а, 6а, 7а унифицированный выходной сигнал 15а. Этот унифицированный выходной сигнал 15а изображен на диаграмме. Унифицированный выходной сигнал 15а поступает на вычислительный блок 16, откуда выходной сигнал 15а управляет движением комбайна 2.
Сведение различно структурированных выходных сигналов 9а, 6а, 7а разных навигационных систем 6, 7, 9 в преобразовательном устройстве 15 позволяет преобразовывать внесистемные сигналы в унифицированный сигнал, используемый уже имеющимся устройством 10 управления для наведения комбайна 2.
На практике навигационные системы с одним и тем же принципом действия могут изготавливаться и поставляться различными изготовителями и поставщиками. Так как эти навигационные системы выдают различные сигналы, в рамках изобретения может быть применено преобразовательное устройство 15, рассчитанное на определенный принцип действия, которое преобразовывает различные входные сигналы навигационных систем с одним и тем же принципом действия, поставляемых разными изготовителями, в унифицированный выходной сигнал.
К преобразовательному устройству 15 могут также подключаться другие, не изображенные системы для учета различных параметров, относящихся к жатве или к машине, как, например, наклона сельскохозяйственной машины на поле, сигналы которых могут восприниматься и преобразовываться по смыслу изобретения, благодаря чему компенсируются различные неточности наведения.
Предлагаемые изобретением метод и устройство распространяются не только на комбайн, но могут быть применены на сельскохозяйственной машине любого рода.
Реферат
Изобретение относится к области управления сельскохозяйственными машинами. Предложены способ и устройство для преобразования по-разному структурированных сигналов различных навигационных систем для автоматического наведения устройства рулевого управления сельскохозяйственной рабочей машины. Используемое преобразовательное устройство формирует унифицированный выходной сигнал и подает его на общее устройство рулевого управления. Изобретение позволяет применять различные навигационные системы для автоматического управления сельскохозяйственной рабочей машиной без дорогостоящих изменений внутри сельскохозяйственной рабочей машины. 2 н. и 10 з.п. ф-лы, 2 ил.
Комментарии