Карта признаков урожая для управления транспортными средствами - RU2405299C2
Код документа: RU2405299C2
Чертежи
Описание
Область техники
Настоящее изобретение относится, в целом, к интеллектуальной уборке урожая, в частности к оказанию помощи в управлении уборочной машиной или подобным средством, основываясь на одном или более признаках урожая.
Предшествующий уровень техники
Большинство современных методов для уборки урожая предусматривают простые этапы прохода за проходом без возможности эффективного разделения урожая в соответствии с уровнем признаков урожая, чтобы оптимизировать потенциал и доходность рыночных цен. Хотя становятся доступными бортовые мониторы урожая для взятия образцов убираемого зерна посредством разовых проб и оценки в целом уровней признаков убираемого урожая, большинство предоставляют информацию о диапазоне или расхождении для партий собираемого урожая в зоне хранения, без разделения урожая в соответствии с признаками. Таким образом, системы автоматического взятия образцов в общем случае испытывают недостаток в хорошем методе для определения областей, где должны браться образцы.
Делалось множество попыток для разделения урожая, основываясь на уровнях признаков, включая использование топологии поля, такой как склон, возвышение и контур, для разделения полей урожая на зоны. Предлагались разделения полей соевых бобов на области, которые коррелированы с уровнями белка. Например, бобы, выращиваемые на холмах, - часть вызревает на недели раньше тех, которые выращиваются в остальной части поля, так что фермеры могут выйти в поле и избирательным образом убрать урожай созревших бобов. Большинство способов разделения основывалось на визуальном восприятии поля и состояния урожая оператором уборочной машины и субъективном представлении потенциального значения.
Прежние оценки уровня желательных признаков на основе прошлой жатвы часто оказывались неэффективными для определения зон признаков в конкретном урожае, поскольку имеется огромное количество переменных, которые влияют на признаки урожая. До сих пор не имелось полностью удовлетворительного способа для определения местоположения границ областей желательных признаков и предоставления информации эффективным и удобным для пользователя способом, чтобы помочь оператору в жатве и разделении урожая, или предоставления ввода в автоматизированную систему управления уборочной машиной для этой цели.
Различные способы предлагались для управления транспортным средством, включая выбор маршрута работы на основе географических факторов пересекаемой области, чтобы минимизировать использование энергии. Такой способ показан, например, в патенте США 5728607. Другие способы планирования маршрута работы для таких функций, как оптимизация проходимых маршрутов, минимизация времени работы, оптимизация операций выгрузки уборочных машин и т.п., представлены в патенте США 6128574. Однако требуется надежный и удобный для пользователя способ для установления плана задания, чтобы способствовать разделению урожая по признаку.
Способ разделения урожая в момент жатвы, включающий этап управления отводным устройством на основе местоположения машины и карты инструкций по уборке урожая, представлен в патенте США 5957304. Такие способы с отводным устройством, в общем случае, ограничивают количество разделяемых партий числом зон хранения или хранилищ, обеспеченных на уборочной машине. Разделение урожая по признаку на количество партий, большее, чем количество зон хранения, представляет проблемы. Разделение урожая на множество партий или загрузок и обеспечение удобного и надежного измерения среднего значения и дисперсии признаков партии или загрузки собранного урожая по-прежнему являются источниками затруднений.
Сущность изобретения
Задачей настоящего изобретения является обеспечить улучшенный способ для разделения собираемого урожая в соответствии с признаками урожая. Также задачей изобретения является обеспечить такой способ, который преодолевает большинство или все из вышеупомянутых проблем.
Другой задачей изобретения является обеспечить улучшенный способ для создания карт признаков урожая и использования карт для разделения собираемого урожая в соответствии с признаками. Также задачей изобретения является обеспечить улучшенный способ для установления абсолютных значений среднего и дисперсии для загрузки урожая, достаточно точных, чтобы удовлетворить требования, по меньшей мере, маркетинга и конечного пользователя.
В соответствии с аспектами настоящего изобретения специфическая для места информация, относящаяся к одному или более признакам урожая, используется для предоставления карты признаков оцениваемого уровня признака урожая. Уборочная машина затем управляется с использованием карты признаков, чтобы разделять убираемый урожай в течение жатвы в соответствии с оцениваемым уровнем признака урожая. В одном варианте осуществления изобретения генерируется предпочтительный маршрут рулевого управления на основе карты признаков, и уборочная машина управляется либо вручную, либо автоматически в соответствии с предпочтительным маршрутом рулевого управления. Использование такого подхода к планированию задания облегчает разделение урожая на множество партий или загрузок в соответствии с признаком урожая. В другом варианте осуществления собранный урожай может направляться в одну из двух или более зон хранения, связанных с уборочной машиной, причем зоны хранения выбираются в зависимости от оцененного уровня признака урожая. С использованием отвода в комбинации с планом задания собранный урожай может разделяться по признаку в некоторое количество партий или загрузок, причем их количество не ограничено количеством зон хранения на уборочной машине.
Специфическая для места информация может включать в себя такие факторы, как профиль местности, мультиспектральное изображение поля, предыдущую или оцениваемую урожайность и условия окружающей среды. Зоны подобных специфических для места характеристик могут определяться для генерирования измерительных точек (для взятия образцов) в пределах, в основном, однородных областей зон. Точки взятия образцов маркируются в соответствии с местоположением GPS (Глобальная система позиционирования) и используются для облегчения создания карт оцениваемых признаков урожая. Карты признаков могут затем использоваться для планирования заданий для определения предпочтительного маршрута жатвы, который минимизирует вариабельность признака в процессе жатвы при минимизации времени жатвы для желательного диапазона вариабельности признаков урожая. Точное среднее и/или дисперсия для разделяемого собираемого урожая устанавливаются для удовлетворения потребностей маркетинга и конечных пользователей. В одном варианте осуществления пробоотборник, размещенный на уборочной машине или в зоне хранения, используется для предоставления абсолютных значений признаков и вариабельности признака для загрузки собираемого урожая.
Указанные и другие задачи, признаки и преимущества настоящего изобретения поясняются в нижеследующем описании со ссылками на чертежи.
Краткое описание чертежей
Фиг. 1 - схематичное представление уборочной машины, оснащенной для уборки урожая на поле и разделения этого урожая в соответствии с одним или более признаками урожая.
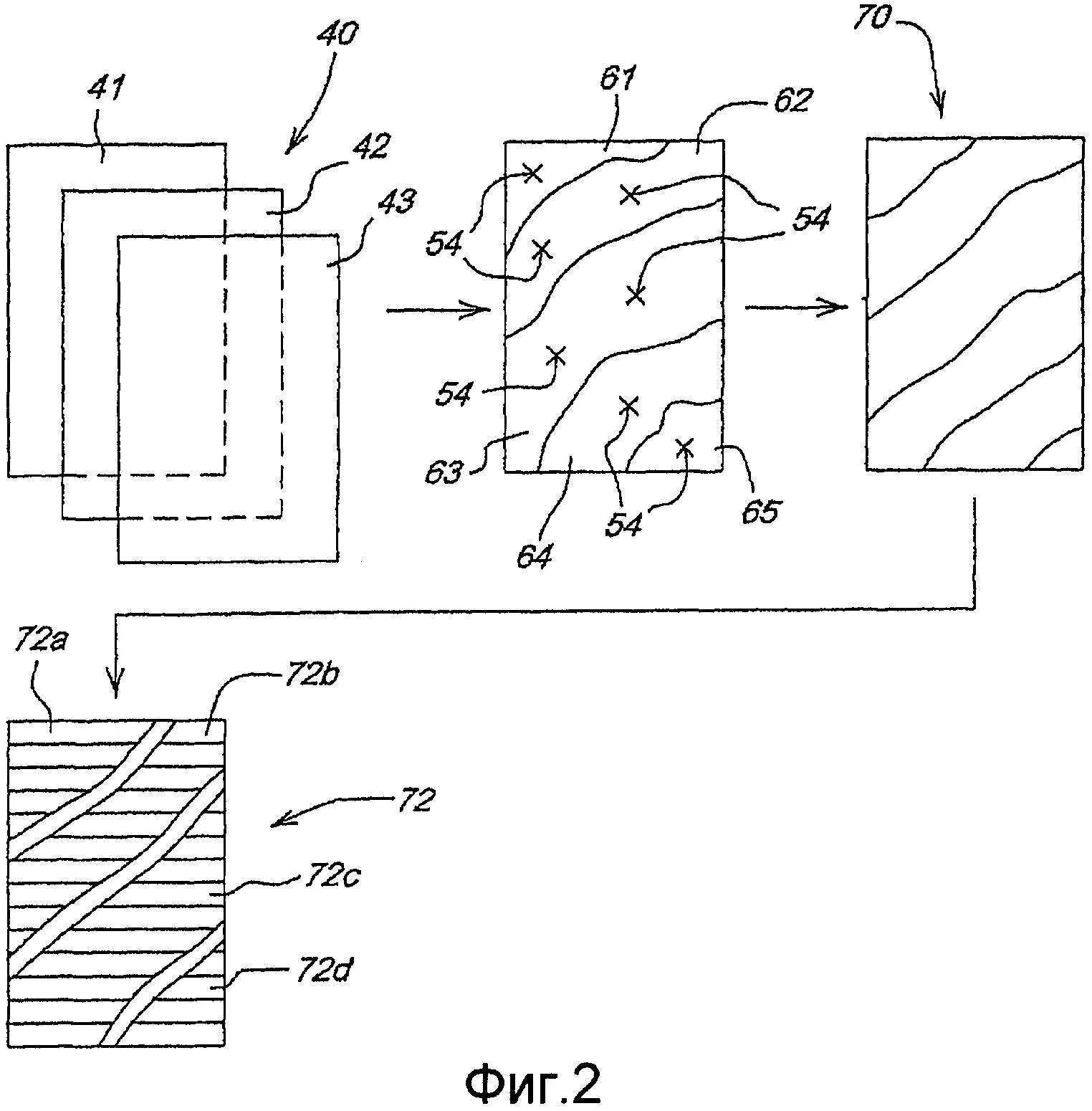
Фиг. 2 - схематичная иллюстрация процесса для обеспечения плана задания из специфической информации поля.
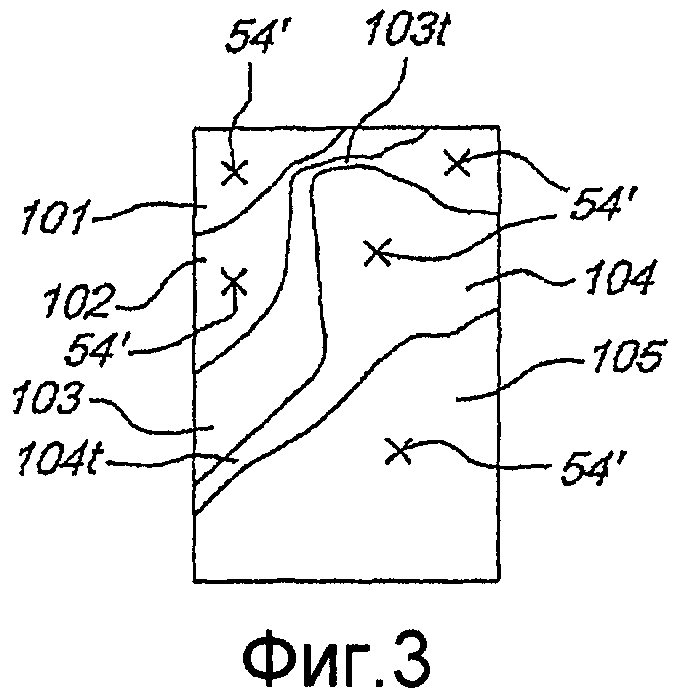
Фиг. 3 - пиксельная карта, иллюстрирующая области перехода между большими однородными областями, имеющими сходные зональные характеристики.
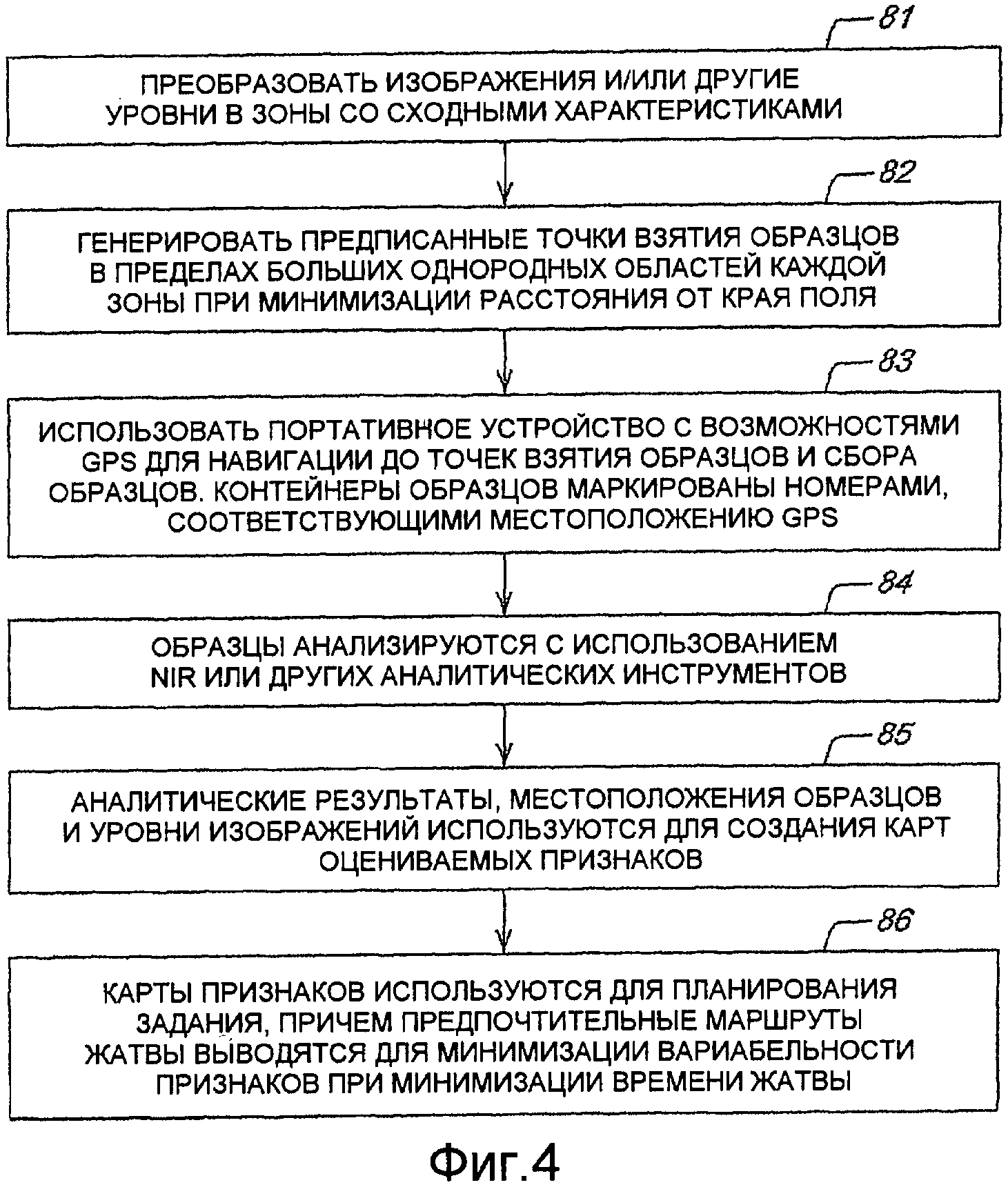
Фиг. 4 - блок-схема способа управления уборочной машиной с использованием признаков урожая,
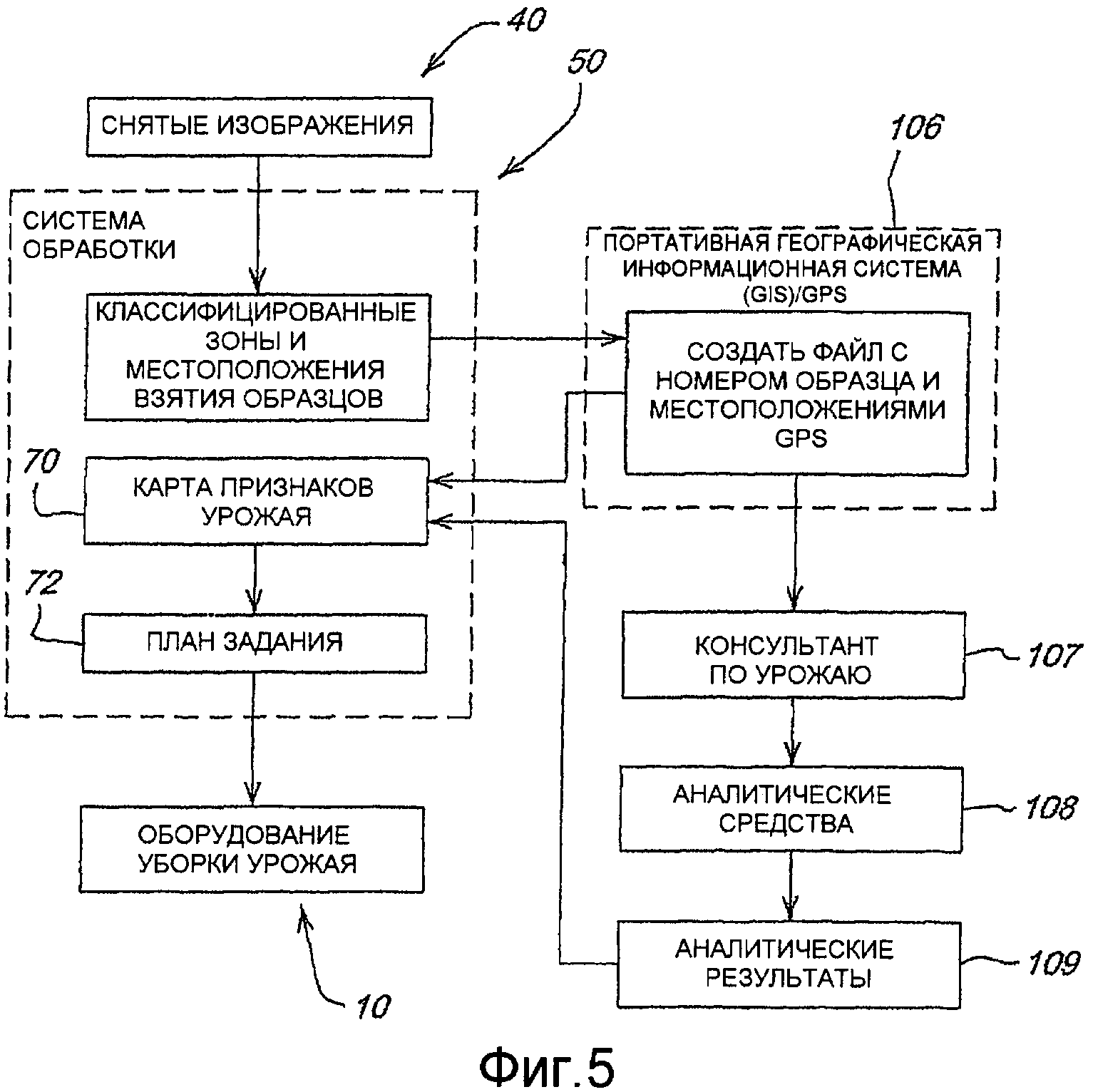
Фиг. 5 - схематичное представление системы для обеспечения плана задания для уборочной машины с использованием специфической для места информации для оцениваемых признаков урожая.
Детальное описание предпочтительного варианта осуществления
На фиг. 1 показана уборочная машина 10, поддерживаемая для перемещения по полю 11 колесами 12 переднего привода и колесами 14 заднего управления. Передняя конструкция 18 сбора урожая направляет собранный урожай в обрабатывающее устройство 20, и собранный урожай направляется в зону 22 хранения, связанную с уборочной машиной, такую как одно или более хранилищ на уборочной машине, и/или в устройство транспортировки урожая, или приемник 24, например грузовик или фургон, перемещающийся вместе или позиционируемый рядом с уборочной машиной. Уборочная машина 10 содержит обычную систему 30 GPS или другую традиционную систему определения местоположения для получения информации о местоположении уборочной машины. Уборочная машина 10 также включает в себя систему 32 автоматического рулевого управления, управляемую процессором 34, находящимся в кабине водителя уборочной машины, в ответ на различные вводы, включая сигналы GPS или другие сигналы определения местоположения, сигналы края убираемого поля, границ областей, желательных маршрутов уборки и т.п. Альтернативным образом, карта может отображаться в кабине водителя, и оператор может вручную управлять уборочной машиной 10 с использованием карты. Уборочная машина 10 показана только в целях иллюстрации, как комбайн с жаткой для сбора зерна, такого как соевые бобы, кукуруза, пшеница, но ясно, что настоящее изобретение также может быть использовано с многими другими типами уборочных машин, включая, без ограничения указанным, машины для сбора хлопка, машины для сбора фруктов, пакетировочные прессы для хлопка и сена с одной или более пакетирующими камерами, оборудование фуражирования для уборки урожая, характеризуемого переменными признаками.
Поле, на котором убирается урожай, разделено на зоны со сходными признаками урожая (фиг. 2 и 3). Карта признаков генерируется с использованием одного или комбинации обычных инструментальных средств, таких как дистанционное мультиспектральное или иное формирование изображений, картографические уровни профиля местности, информация о почвах и урожае, ранее собранная сенсорами почв и урожая, оцениваемый сбор урожая и/или картографический уровень, полученный с использованием наземного транспортного средства, оснащенного сенсорами.
Как показано для примера на фиг. 2 и 5, множество уровней или снятых изображений 40, включающих в себя уровни 41, 42, 43, вводится в систему 50 обработки (фиг. 5) для генерации карты или определителя предписываемых измерительных точек (для взятия образцов) 54 в пределах относительно больших и, в основном, однородных областей 61, 62, 63, 64 и 65. Образцы, полученные в точках 54, анализируются, и генерируется карта 70 оцениваемых признаков урожая. Карта 70 признаков урожая затем используется для генерации плана 72 задания для разделения убираемого урожая в соответствии с одним или более признаками урожая. Признак урожая может представлять собой, например, уровень белка, уровень крахмала, уровень масла, содержание сахара, уровень влажности, уровень усваиваемых питательных веществ или любой другой признак урожая, представляющий интерес. Как показано на фиг. 2, план задания включает в себя уборку отдельных партий урожая из отдельных областей 72А, 72В, 72С и 72D. При уборке урожая пропашных культур план задания предусматривает управление уборочной машиной 10 параллельно бороздам в каждой области. При уборке урожая непропашных культур, например при уборке пшеницы, могут генерироваться непараллельные маршруты для максимизации эффективности по топливу, минимизации проходимых расстояний и снижения количества поворотов на зональных границах для оптимизации производительности.
На этапе 81 (фиг. 4) получают уровень высокого разрешения, описывающий поле. Например, уровень 41 может представлять собой дистанционно сформированное мультиспектральное изображение, но также могут использоваться и другие типы дистанционных изображений. Альтернативным образом, уровень может быть сформирован из данных, полученных с помощью наземного транспортного средства, оснащенного сенсорами. Изображение при мультиспектральной реализации содержит четыре различных изображения, каждое из которых представляет отличающийся диапазон для одной и той же области. Диапазоны включают в себя зеленый, красный, синий и ближний инфракрасный (NIR) диапазоны. Альтернативно или дополнительно, может использоваться другая информация уровней, такая как профиль местности или электрическая проводимость. После того как изображение получено, могут быть выявлены зоны, имеющие сходные характеристики в каждом из уровней, с использованием существующих пакетов программного обеспечения. Программное обеспечение часто использует алгоритмы кластеризации, такие как «k средних», для разделения уровня 41 на множество зон. Альтернативно индивидуальные диапазоны изображения могут быть преобразованы в индекс, такой как обычно используемый нормализованный дифференциальный вегетативный индекс (NDVI), который может быть разделен на множество зон, которые определяют различные характеристики роста урожая. NDVI вычисляется с использованием следующей формулы:
NDVI=(NIR-red)/(NIR+red),
где NIR - уровень NIR из диапазонов изображения, а red - уровень красного. Значения находятся в пределах от -1 до 1, и деление индекса на зоны связано с делением вычисленных значений на диапазоны. Например, области между -1 и -0,9 могут быть одной зоной, области между -0,9 и -0,8 - другой зоной, и области между -0,8 и -0,7 - третьей зоной и т.д. Зоны, полученные на этапе 81, указывают, что имеется различие в признаке, представляющем интерес, на протяжении зон, но не связывают абсолютное значение с уровнем признака. На следующем этапе 82 различные точки 54 выбираются в пределах выявленных зон 61-65, указывая, где следует осуществить предписываемые взятия образцов урожая. В качестве дальнейшего усовершенствования этого этапа идентифицируются точки, по возможности более близкие к краю поля, чтобы исключить излишнее перемещение за пределы поля. Дальнейшим усовершенствованием является выбор измерительных точек 54 таким образом, чтобы минимизировать резкость перехода от зоны к зоне. Измерительные точки выбираются для минимизации резкости путем изолирования пикселей, которые находятся внутри переходных зон, определенных вычислением крутизны зоны:
Крутизна = изменение в зонах/изменение в расстоянии,
и затем исключения этих пикселей из рассмотрения в качестве точек взятия образцов. Последующий этап заключается в выявлении пикселей, которые находятся внутри однородных кластеров сходных классов зон. В то же время расстояние от мест взятия образцов до края поля минимизируется.
В некоторых случаях будет иметься два или три скачка зон между пикселями в переходных зонах (фиг. 3). Вычисление крутизны, как описано выше, указывает, имеется ли большой скачок зон на коротком расстоянии. Причина минимизации резкости переходов состоит в необходимости выбора зон, которые являются большими однородными областями, и исключения получения зон, которые имеют ширину лишь в один или два пикселя. Если зона очень узкая, то имеется возможность того, что будет достаточно велика ошибка GPS, состоящая в том, что образец будет взят из соседней зоны, а не из зоны, представляющей интерес. Фиг. 3 иллюстрирует область, разделенную на несколько зон 101, 102, 103, 104 и 105, включая узкие переходные области 103t и 104t. Образцы берутся в местоположениях 54' из более широких однородных зон, но не из переходных областей 103t и 104t.
На третьем этапе 83 (фиг. 4) местоположения точек взятия образцов и окрашенные зоны вводятся в PDA (персональный цифровой помощник), карманный компьютер, планшетный компьютер или иной портативный компьютер 106 с возможностями GPS или с возможностью осуществления связи с приемником GPS. Консультант 107 использует эту информацию для навигации в различные точки, такие как точки 54, показанные на фиг. 2, и получает образец урожая в каждой точке. Консультант 107 инициирует генерацию номера образца с использованием портативного компьютера. Номер образца будет ассоциирован с координатами GPS его текущего местоположения и с образцом, который был взят в этом местоположении.
На этапе 84 образцы урожая, взятые на этапе 83, анализируются с использованием обычных аналитических инструментальных средств для присвоения абсолютных значений признака, представляющего интерес, образцам. Образцы могут посылаться в лабораторию для анализа и получения результатов тестирования, связанных с местоположением, в котором они были взяты. Альтернативно, портативное устройство анализа или другое устройство, работающее в полевых условиях на этапе 83, может обеспечить необходимые данные.
Хотя оцененные среднее и дисперсия для загрузки из каждой из областей 72А-72D могут быть вычислены из распределения результата, который создает загрузку, такая оценка может быть недостаточно точной, чтобы удовлетворить потребностям маркетинга и требованиям конечных пользователей. В другом варианте осуществления изобретения уборочная машина 10 может включать в себя автоматический пробоотборник 114 потока зерна в зоне 22 хранения. Зерно избирательным образом подается в пробоотборник, и образец направляется в контейнер со штрихкодом или иную конструкцию 116 для обеспечения абсолютного значения признака урожая для загрузки и/или для получения точной оценки вариабельности признака урожая. Кроме того, аналогичные подходы могут быть использованы для получения подобразцов зерна, подаваемого в зону хранения или удаляемого из нее, так чтобы могло быть оценено качество зерна, подаваемого в грузовики или т.п. Устройство NIR может обеспечивать промежуточную оценку в помощь оператору при принятии решений относительно того, какие устройства или отсеки 24 для загрузки должны быть использованы, базируясь на ожидаемых соотношениях между спектральными характеристиками и желательными признаками урожая. Например, урожай может разделяться в соответствии с тем, находится ли уровень белков в высоком, среднем или низком диапазоне. Местоположения взятия образцов в течение уборки урожая могут выбираться вручную или автоматически, базируясь на точках 54 карты по фиг. 2. Местоположения взятия образцов могут также основываться на считывании с сенсора NIR на уборочной машине 10.
На этапе 85 аналитические результаты 109, полученные на этапе 84, и местоположения, из которых были взяты соответствующие образцы, вводятся в систему обработки, в которой уже сохранены информационные уровни для поля. Эти данные используются для создания карты 70 оцененных признаков на этапе 85. Измеренные значения признака ассоциируются с соответствующими пиксельными значениями на каждом из уровней. Результирующий массив оценивается с использованием статистической процедуры, такой как множественная линейная регрессия. Результирующее уравнение регрессии затем применяется к уровню или уровням исходного изображения для оценивания значения признака для всех пикселей, для получения в результате карты оцененных признаков с тем же разрешением, что и уровень или уровни исходных данных.
На этапе 86 карта признаков, созданная на этапе 85, используется для создания плана задания, который указывает, как разделить поле на области, которые относительно однородны по отношению к признаку, представляющему интерес. То, каким образом создается план задания, зависит от урожая и от того, каким образом уборочная машина перемещается через убираемое поле. Для урожая пшеницы можно следовать практически по любому маршруту. Для урожая пропашной культуры, такой как кукуруза, уборочная машина должна перемещаться в направлении, параллельном направлению борозд, чтобы избежать потери зерна. План задания должен вводиться в систему 32 автоматического рулевого управления, и транспортное средство будет маневрировать, перемещаясь в различные области поля. Альтернативно, план задания может быть реализован путем отображения карты признаков в кабине водителя уборочной машины, позволяя оператору принимать решения относительно того, каким образом осуществлять навигацию.
Планирование задания, как описано выше, может также использоваться в ситуациях, когда собранный урожай должен немедленно выгружаться из уборочной машины. Примеры включают пакетирование сена, пакетирование хлопка или системы контейнеризации, при этом уборочная машина 10 управляется в соответствии с планом задания для минимизации вариабельности в пределах каждого тюка или контейнера. Такое планирование задания для тюков или контейнеров особенно полезно, когда тюки или контейнеры содержат собранный урожай с относительно большой посевной площади. Система радиочастотной идентификации (RFID) или иная система маркировки может обеспечивать информацию о местоположении при уборке урожая и признаках урожая для тюка или контейнера, но дополнительное использование плана задания сокращает вариабельность признака урожая для каждого тюка или контейнера.
В другом варианте осуществления собранный урожай может направляться в один или более отсеков хранения, связанных с уборочной машиной, причем зона хранения выбирается в зависимости от оцененного уровня признака урожая. Например, отсеки для хранения могут представлять собой два или более хранилища или камеры 22а и 22b в зоне 22 хранения или два или более сборника или участка 24а и 24b устройства 24 для приема урожая. Путем использования отвода вместе с планом задания собранный урожай может разделяться по признаку с меньшим отклонением на некоторое количество партий или загрузок, причем это количество не ограничено количеством зон хранения на уборочной машине.
Если имеется относительно узкая зона урожая с отличающимся признаком, как, например, показанная как 120 на фиг. 1, то механизм отвода может направлять собранный урожай из этой области в одно из хранилищ 22а и 22b для поддержания желательного уровня признака партии в другом хранилище. Такой отвод приводит в результате к меньшим прерываниям маршрута в плане задания для уборочной машины 10, без увеличения отклонений в признаках урожая в партии собранного урожая.
Из описания предпочтительного варианта очевидно, что различные модификации могут быть выполнены без отклонения от объема изобретения, как оно представлено в формуле изобретения.
Реферат
Изобретение относится к сельскому хозяйству и может быть использовано для управления сборочной машиной или подобным средством, основываясь на одном или более признаках урожая. Техническим результатом является обеспечение возможности разделения урожая по признаку на количество партий, большее, чем количество зон хранения. Способ для разделения поля на зоны со сходными признаками урожая и создания плана задания для управления уборочной машиной (10) для избирательной уборки урожая базируется на одном или более признаках. Признаки включают в себя уровень белка, уровень крахмала, уровень масла, содержание сахара, уровень влажности, уровень усваиваемых питательных веществ или любую другую характеристику урожая, представляющую интерес. Способ может быть применен для избирательной уборки урожая и/или разделения в соответствии с признаками любого урожая, включая зерновые культуры, такие как пшеница, кукуруза, бобы, фрукты, такие как виноград, или урожай кормовых культур. Направленное взятие образцов урожая предоставляет информацию об абсолютных значениях и отклонениях для разделяемых партий собранного урожая. 4 н. и 28 з.п. ф-лы, 5 ил.
Формула
a) предоставление специфической для места информации, относящейся к одному или более признакам урожая;
b) ввод специфической для места информации в процессор;
c) предоставление карты признаков оцениваемого уровня признака урожая для, по меньшей мере, одного признака урожая с использованием специфической для места информации; и
d) в процессе жатвы управление уборочной машиной с использованием карты признаков, чтобы управлять уборочной машиной и разделять убираемый урожай в соответствии с оцениваемым уровнем признака урожая.
a) предоставление специфической для места информации, относящейся к одному или более признакам урожая;
b) ввод специфической для места информации в процессор;
c) предоставление карты признаков оцениваемого уровня признака урожая для, по меньшей мере, одного признака урожая с использованием специфической для места информации; и
d) в процессе уборки урожая рулевое управление уборочной машиной с использованием карты признаков для разделения убираемого урожая в соответствии с оцениваемым уровнем признака урожая.
a) предоставление специфической для места информации, относящейся к признакам урожая;
b) предоставление карты признаков оцениваемого уровня признака урожая для, по меньшей мере, одного признака урожая с использованием специфической для места информации; и
c) в процессе уборки урожая управление уборочной машиной с использованием карты признаков, чтобы разделять убираемый урожай в соответствии с оцениваемым уровнем признака урожая, причем этап управления включает в себя рулевое управление уборочной машиной в зависимости от признаков урожая.
a) предоставление специфической для места информации, относящейся к признакам урожая;
b) определение зон сходных характеристик из специфической для места информации;
c) идентификацию местоположений взятия образцов в зонах со сходными характеристиками;
d) взятие образцов признаков во множестве идентифицированных местоположений взятия образцов;
e) предоставление карты признаков оцениваемого уровня признака урожая для, по меньшей мере, одного признака урожая с использованием специфической для места информации; и
f) управление уборочной машиной с использованием карты признаков, чтобы разделять убираемый урожай в соответствии с оцениваемым уровнем признака урожая.
Комментарии