Система и способ отслеживания полосы для внедорожного транспортного средства и внедорожное транспортное средство - RU2728604C2
Код документа: RU2728604C2
Чертежи
Описание
Ссылка на родственную заявку
[0001] По настоящей заявке испрашивается приоритет в соответствии с заявкой на патент США № 15/179,753, озаглавленной “SWATH TRACKING SYSTEM FOR AN OFF-ROAD VEHICLE”, поданной 10 июня 2016 года, которая настоящим включена в данный документ путём ссылки в полном объёме.
Уровень техники
[0002] Изобретение относится в общем к системам направления внедорожных транспортных средств, и более конкретно к системе отслеживания полосы для внедорожного транспортного средства.
[0003] Внедорожные транспортные средства, такие как сельскохозяйственные тракторы, обычно направляют по полю вручную (например, через ввод со стороны водителя). То есть оператор управляет направлением и скоростью внедорожного транспортного средства из кабины. Последние разработки, интегрирующие системы навигации на основе GPS в системы управления сельскохозяйственными транспортными средствами, обеспечивают автоматический или полуавтоматический режимы рулевого управления. Например, некоторые сельскохозяйственные транспортные средства могут содержать систему управления, выполненную с возможностью автоматического направления транспортного средства, чтобы следовать траектории между, по или рядом с рядами в поле. Узкий участок, образуемый по ширине транспортного средства и/или орудия, когда транспортное средство следует траектории, можно называть полоса. К сожалению, по множеству причин транспортное средство может отклоняться или сходить с запланированной траектории.
Раскрытие изобретения
[0004] Ниже изложены некоторые варианты осуществления, соизмеримые по объёму с первоначально заявленным предметом изобретения. Эти варианты осуществления не предназначены для ограничения объема заявленного объекта изобретения, но вместо этого данные варианты осуществления предназначены только для обеспечения краткого изложения возможных форм изобретения. На самом деле, изобретение может охватывать множество форм, которые могут быть аналогичными или отличаться от изложенных ниже вариантов осуществления.
[0005] В одном варианте осуществления система отслеживания полосы для внедорожного транспортного средства содержит систему управления с процессором и запоминающим устройством. Система управления выполнена с возможностью приёма множества точек местоположения транспортного средства и текущего состояния транспортного средства, при этом текущее состояние транспортного средства содержит текущее местоположение транспортного средства, формирования запланированной траектории транспортного средства через одну или более из множества точек местоположения транспортного средства, формирования корректирующей траектории из текущего местоположения транспортного средства в одну из множества точек местоположения транспортного средства по запланированной траектории транспортного средства вперед от текущего местоположения транспортного средства по направлению движения, формирования совмещенной траектории посредством совмещения управляющих сигналов запланированной траектории транспортного средства и корректирующей траектории по меньшей мере частично на основании присвоенного весового коэффициента, при этом присвоенный весовой коэффициент по меньшей мере частично основан на погрешности курса, расстоянии между текущим местоположением транспортного средства и запланированной траекторией или их комбинации, и направления внедорожного транспортного средства согласно совмещенным управляющим сигналам по совмещенной траектории.
[0006] В другом варианте осуществления внедорожное транспортное средство содержит систему рулевого управления, систему управления скоростью, устройство определения местоположения в пространстве и систему управления. Система рулевого управления выполнена с возможностью управления направлением движения внедорожного транспортного средства. Система управления скоростью выполнена с возможностью управления скоростью движения внедорожного транспортного средства. Устройство определения местоположения в пространстве выполнено с возможностью определения текущего состояния внедорожного транспортного средства. Система управления выполнена с возможностью приёма множества точек местоположения транспортного средства, формирования запланированной траектории транспортного средства через одну или более из множества точек местоположения транспортного средства, приёма текущего состояния транспортного средства от устройства определения местоположения в пространстве, при этом текущее состояние транспортного средства содержит текущее местоположение транспортного средства, формирования корректирующей траектории из текущего местоположения транспортного средства в одну из множества точек местоположения транспортного средства по запланированной траектории транспортного средства вперед от текущего местоположения транспортного средства по направлению движения, формирования совмещенной траектории посредством совмещения управляющих сигналов запланированной траектории транспортного средства и корректирующей траектории по меньшей мере частично на основании присвоенного весового коэффициента, при этом присвоенный весовой коэффициент по меньшей мере частично основан на погрешности курса, расстоянии между текущим местоположением транспортного средства и запланированной траекторией или их комбинации, и управления системой рулевого управления и системой управления скоростью для направления внедорожного транспортного средства по совмещенной траектории.
[0007] В дополнительном варианте осуществления способ содержит приём множества точек местоположения транспортного средства, текущего состояния транспортного средства и времени задержки цепи обратной связи, при этом текущее состояние транспортного средства содержит текущее местоположение транспортного средства, формирование запланированной траектории транспортного средства через одну или более из множества точек местоположения транспортного средства, формирование корректирующей траектории из текущего местоположения транспортного средства в одну из множества точек местоположения транспортного средства по запланированной траектории транспортного средства вперед от текущего местоположения транспортного средства по направлению движения, формирование совмещенной траектории посредством совмещения запланированной траектории транспортного средства и корректирующей траектории по меньшей мере частично на основании присвоенного весового коэффициента, при этом присвоенный весовой коэффициент по меньшей мере частично основан на погрешности курса, расстоянии между текущим местоположением транспортного средства и запланированной траекторией или их комбинации, и направление внедорожного транспортного средства по совмещенной траектории.
Краткое описание чертежей
[0008] Эти и другие признаки, аспекты и преимущества настоящего изобретения станут лучше понятны при прочтении нижеследующего подробного описания со ссылкой на сопровождающие чертежи, на которых одинаковые позиции обозначают одинаковые части на всех чертежах, на которых:
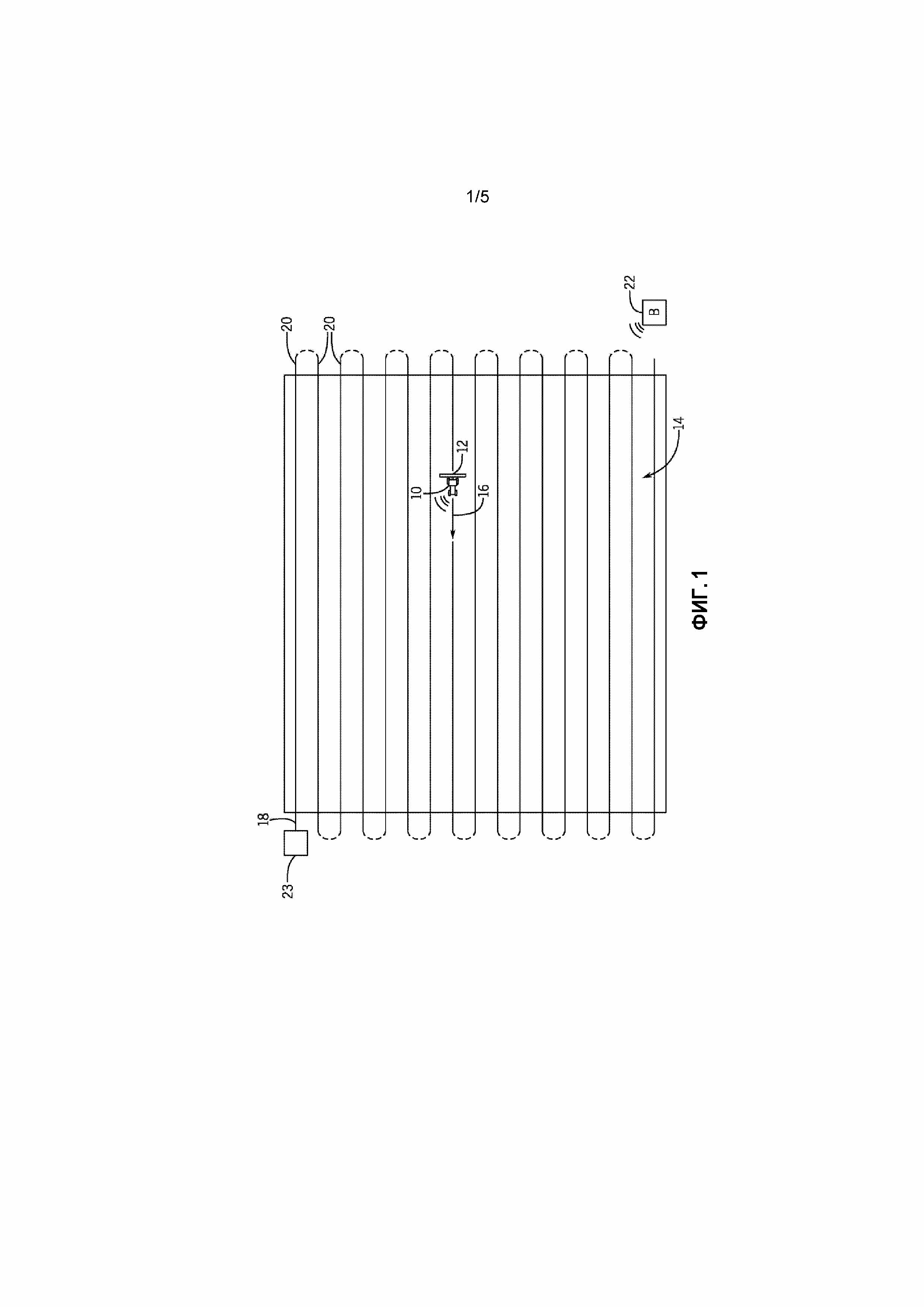
[0009] На фиг. 1 представлено схематичное изображение варианта осуществления внедорожного транспортного средства и сельскохозяйственного орудия на сельскохозяйственном поле;
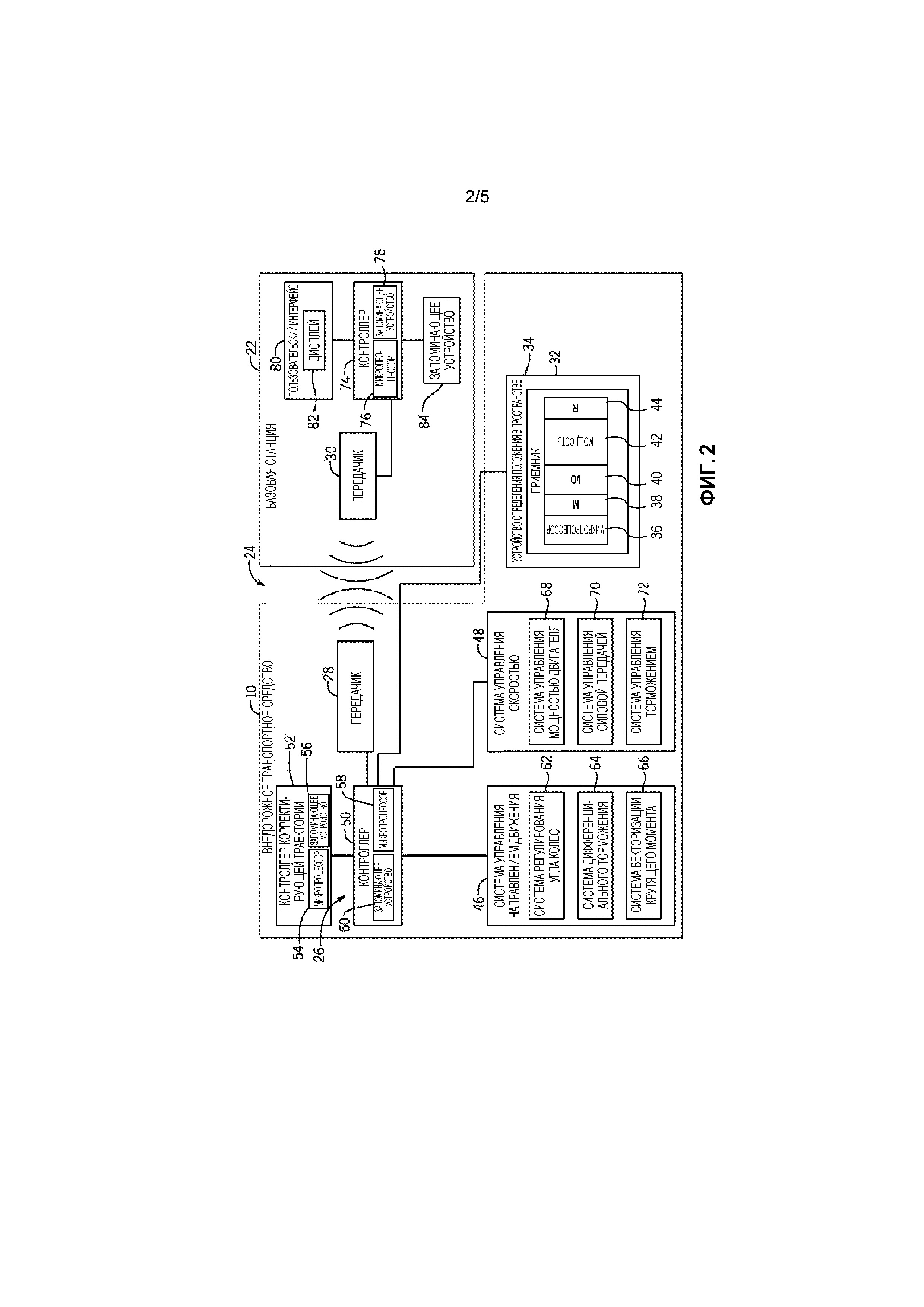
[0010] На фиг. 2 представлено схематичное изображение варианта осуществления системы отслеживания полосы, которую можно использовать для управления внедорожным транспортным средством фиг. 1;
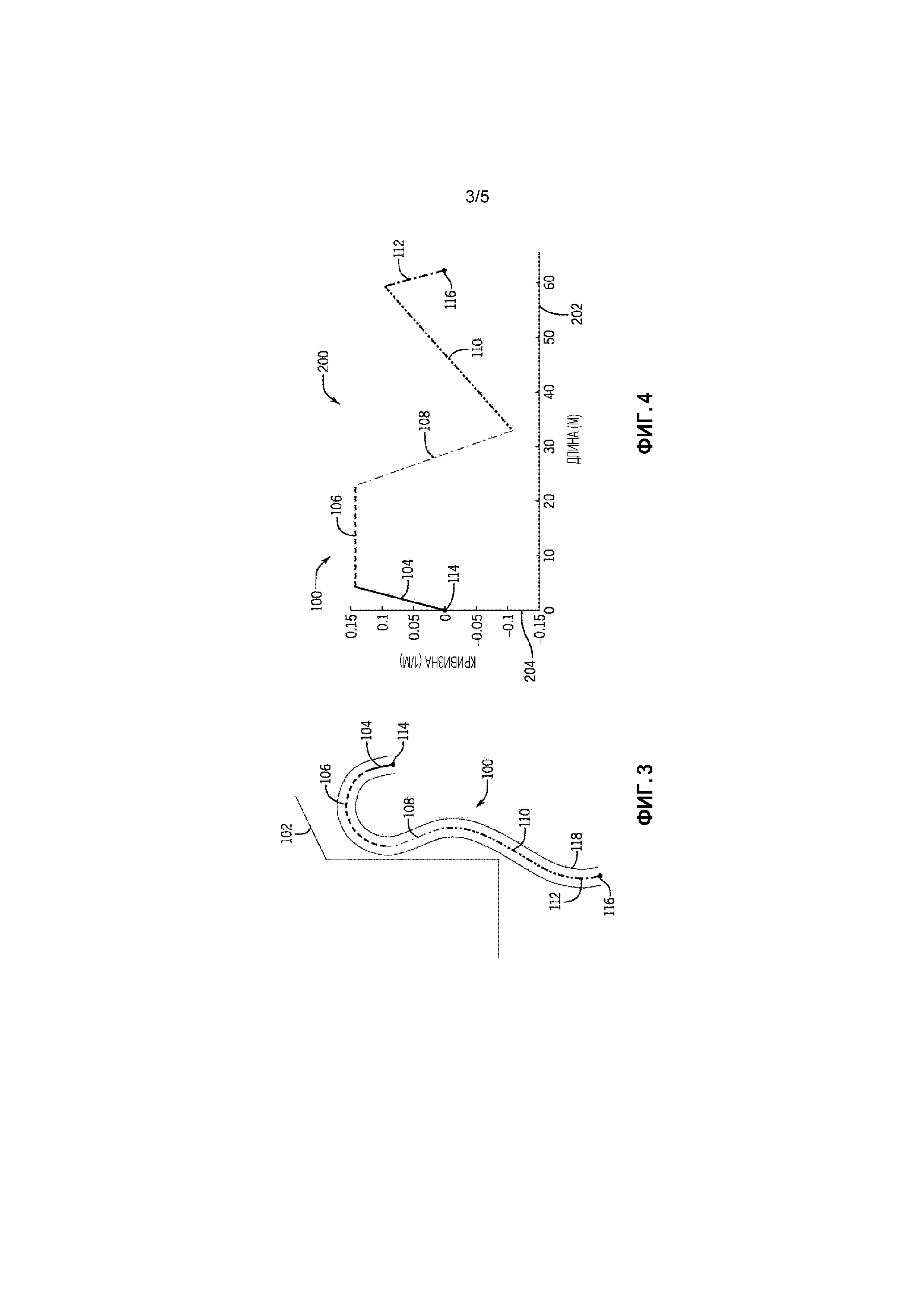
[0011] На фиг. 3 представлен вид сверху C2 непрерывного сегмента запланированной траектории внедорожного транспортного средства;
[0012] На фиг. 4 представлен график кривизныC2 сегмента непрерывной траектории транспортного средства, показанной на фиг. 3, в качестве функции длины траектории;
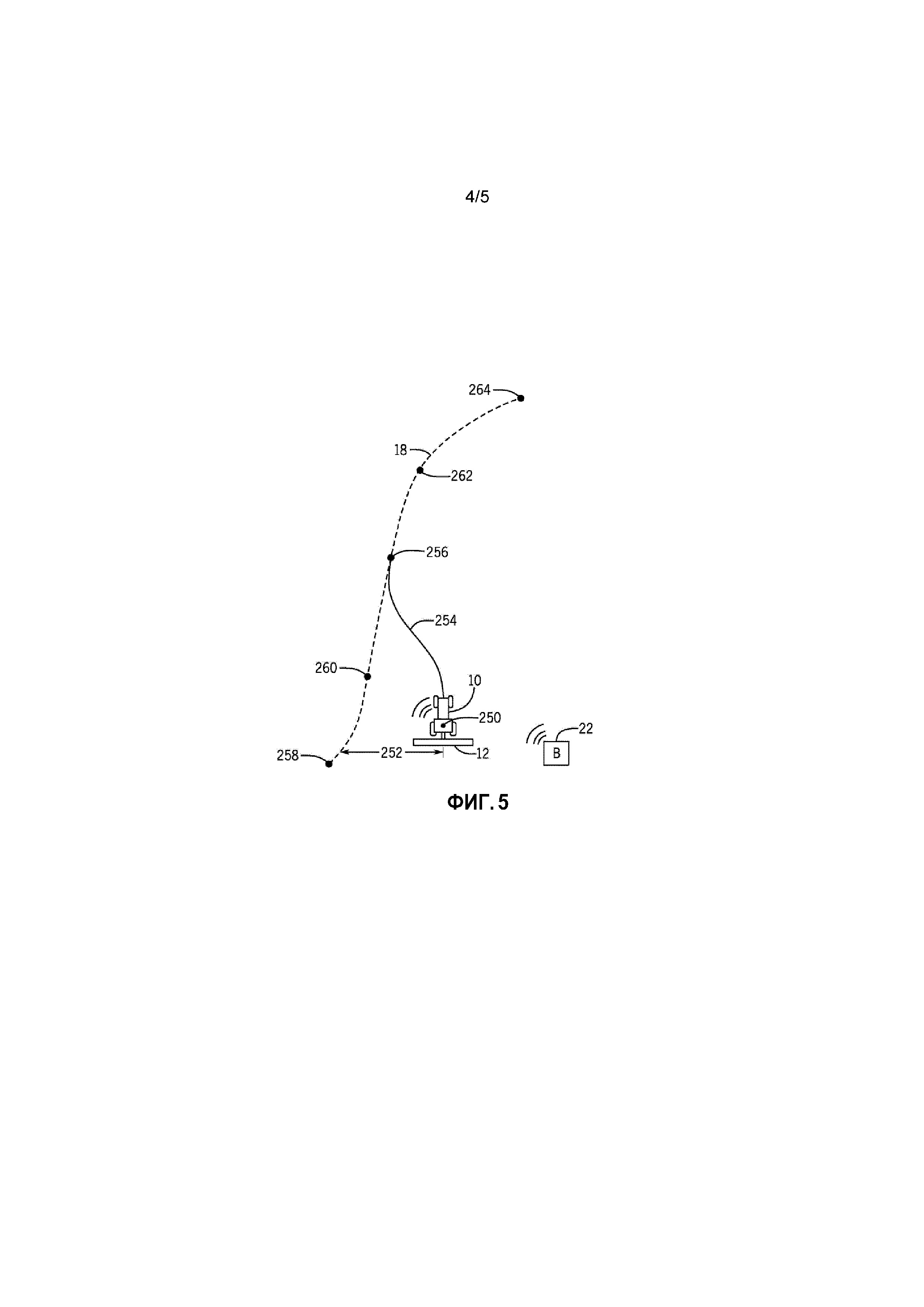
[0013] На фиг. 5 представлено схематичное изображение внедорожного транспортного средства, находящегося в местоположении на расстоянии от запланированной траектории, и корректирующей траектории в точку на запланированной траектории; а
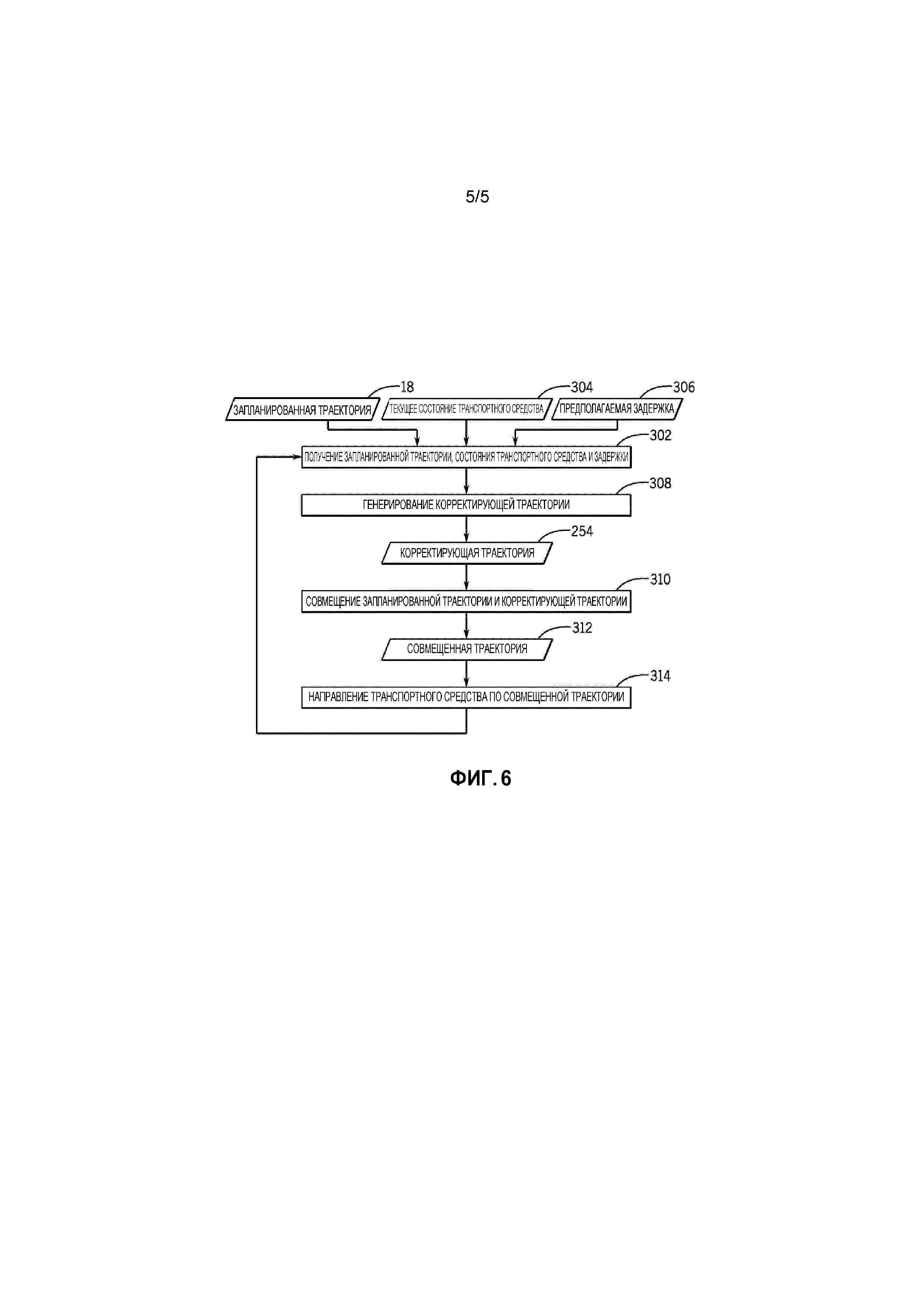
[0014] На фиг. 6 представлена блок-схема процесса возврата внедорожного транспортного средства на запланированную траекторию.
Осуществление изобретения
[0015] На фиг. 1 представлено схематичное изображение варианта осуществления внедорожного транспортного средства 10 и сельскохозяйственного орудия 12 на сельскохозяйственном поле 14. Внедорожное транспортное средство 10 (например, трактор или другой тягач) выполнено с возможностью буксировки сельскохозяйственного орудия 12 по полю 14 в направлении 16 движения. В некоторых вариантах осуществления внедорожное транспортное средство 10 направляют (например, с помощью автоматизированной системы) по траектории 18 для прохождения поля 14 вдоль по существу параллельных рядов 20. Когда транспортное средство 10 буксирует орудие 12 по полю 14 по траектории, ширина орудия 12 охватывает полосу через поле. В альтернативных вариантах осуществления внедорожное транспортное средство 10 можно направлять проходить поле 14 по другим маршрутам (например, по спиральной траектории и т. д.). Как должно быть понятно, сельскохозяйственным орудием 12 может быть любое подходящее орудие для выполнения сельскохозяйственных работ на поле 14. Например, в некоторых вариантах осуществления сельскохозяйственным орудием 12 среди прочего может быть почвообрабатывающее орудие, орудие для внесения удобрений, орудие для посева или посадки или уборочное орудие. Несмотря на то, что в проиллюстрированном варианте осуществления сельскохозяйственное орудие 12 буксируют с помощью внедорожного транспортного средства 10, следует понимать, что в альтернативных вариантах осуществления сельскохозяйственное орудие 12 может составлять единое целое с внедорожным транспортным средством 10.
[0016] В некоторых вариантах осуществления внедорожное транспортное средство 10 выполнено с возможностью работы автономно (например, без оператора, находящегося в кабине внедорожного транспортного средства 10). Соответственно, автоматическая система может направлять внедорожное транспортное средство 10 и сельскохозяйственное орудие 12 по траектории 18 по полю 14 без непосредственного управления оператором. В таких вариантах осуществления автономное внедорожное транспортное средство 10 можно выполнить с возможностью обмена данными с базовой станцией 22. Например, в некоторых вариантах осуществления внедорожное транспортное средство 10 может принимать от базовой станции 22 данные, связанные с траекторией 18 (например, ряд точек или кривую).
[0017] Кроме того, в некоторых вариантах осуществления внедорожное транспортное средство 10 может быть выполнено с возможностью полуавтономной работы. Например, оператор в кабине может направлять внедорожное транспортное средство 10 в исходное положение 23 внутри или рядом с полем 14, а автоматизированная система может направлять внедорожное транспортное средство 10 по выбранному/запланированному маршруту (например, по траектории 18) по полю 14, в то время как оператор отслеживает работу внедорожного транспортного средства 10 и/или орудия 12.
[0018] Во время работы внедорожное транспортное средство 10 может отклоняться от запланированной траектории 18 или полосы. Это отклонение может происходить вследствие вводимых оператором данных, географических особенностей в поле 14, препятствия в поле 14, изменений в работе внедорожного транспортного средства вследствие различных полевых условий (слякоти, скользкой земли, больших комьев грязи и т. д.) и тому подобное. В других случаях оператор может сдвигать запланированную траекторию для лучшего выравнивания с существующими рядами или другими физическими особенностями в поле. Соответственно, внедорожное транспортное средство 10 может пытаться возвращаться на запланированную траекторию 18. Например, в некоторых вариантах осуществления внедорожное транспортное средство 10 может формировать скорректированную траекторию из своего текущего положения в точку на траектории 18. Затем для создания совмещенной траектории внедорожное транспортное средство 10 может совместить запланированную траекторию 18 и скорректированную траекторию посредством совмещения управляющих сигналов для каждой траектории, взвешивания каждого на основании погрешности (например, насколько далеко внедорожное транспортное средство 10 отклонилось от запланированной траектории 18 или погрешности направления транспортного средства). Затем внедорожное транспортное средство может следовать по совмещенной траектории назад на запланированную траекторию 18 и продолжать двигаться по запланированной траектории 18.
[0019] На фиг. 2 представлено схематичное изображение варианта осуществления системы 24 отслеживания полосы, которую можно использовать для управления внедорожным транспортным средством 10 фиг. 1. В проиллюстрированном варианте осуществления система 24 отслеживания полосы содержит основную систему 26 управления (например, установленную на внедорожном транспортном средстве 10), а внедорожное транспортное средство 10 содержит первый приемопередатчик 28, выполненный с возможностью создания беспроводного канала связи со вторым приемопередатчиком 30 базовой станции 22. Как должно быть понятно, первый и второй приемопередатчики 28, 30 могут работать в любом подходящем частотном диапазоне внутри электромагнитного спектра. Например, в некоторых вариантах осуществления приемопередатчики 28, 30 могут передавать и принимать радиоволны внутри частотного диапазона от приблизительно 1 Гц до приблизительно 10 Гц. Кроме того, первый и второй приемопередатчики 28, 30 могут использовать любой подходящий протокол обмена данными, такой как стандартный протокол (например, Wi-Fi, Bluetooth и т. д.) или проприетарный протокол.
[0020] В проиллюстрированном варианте осуществления внедорожное транспортное средство 10 содержит устройство 34 определения местоположения в пространстве, которое установлено на внедорожном транспортном средстве 10 и выполнено с возможностью определения положения внедорожного транспортного средства 10. Как должно быть понятно, устройство 34 определения местоположения в пространстве может содержать любую подходящую систему, выполненную с возможностью определения положения внедорожного транспортного средства 10, такую как, например, системы глобального позиционирования (GPS) или глобальная спутниковая навигационная система (GLONASS). Устройство 34 определения местоположения в пространстве обменивается данными с основной системой 26 управления транспортного средства. Устройство 34 определения местоположения в пространстве может содержать приемник 32 глобальной спутниковой навигационной системы (GNSS), выполненный с возможностью обмена данными с двумя или более спутниками на орбите (например, GPS, GLONASS, Galileo, BeiDou и т. д.) для определения местоположения, направления, скорости и т. д. транспортного средства 10. Приемник 32 может содержать один или более микропроцессоров 36, запоминающий элемент 38, систему 40 ввода/вывода, источник 42 питания и радиосхему 44. Процессоры 36 могут запускать программы, хранящиеся в запоминающем элементе 38, для расчета положения транспортного средства 10. На основании расчетного положения с течением времени процессор 36 также может определять направление, скорость транспортного средства 10 и т. д. В некоторых вариантах осуществления устройство 34 определения местоположения в пространстве может содержать трехмерную систему визуализации, такую как Lidar, которую можно использовать в сочетании с GNSS и выполненную с возможностью содействия при определении требуемой траектории и определении положения и ориентации транспортного средства относительно траектории. Кроме того, устройство 34 определения местоположения в пространстве может содержать усиливающую систему, такую как кинематика реального времени (RTK) или широкозонная усиливающая система (WAAS) для улучшения точности устройства 34 определения местоположения в пространстве.
[0021] В некоторых вариантах осуществления устройство 34 определения местоположения в пространстве можно выполнить с возможностью определения положения внедорожного транспортного средства 10 относительно фиксированной точки внутри поля (например, с помощью фиксированного радиоприемопередатчика 30). Соответственно, устройство 34 определения местоположения в пространстве можно выполнить с возможностью определения положения внедорожного транспортного средства 10 относительно фиксированной глобальной системы координат (например, с помощью GPS) или фиксированной локальной системы координат. В некоторых вариантах осуществления первый приемопередатчик 28 выполнен с возможностью передачи сигнала, показывающего положение внедорожного транспортного средства 10, в приемопередатчик 30 базовой станции 22. На основании определенного местоположения внедорожного транспортного средства 10 система 26 управления может определить (например, с помощью процессора) относительную близость к одному или более рядам или полосам, одной или более границам, одной или более разворотным полосам и т. д. Кроме того, система 26 управления может определить запланированную траекторию через точки или кривые, принимаемые от базовой станции 22, и/или корректирующую траекторию из текущего положения транспортного средства назад на запланированную траекторию 18.
[0022] В проиллюстрированном варианте осуществления внедорожное транспортное средство 10 содержит систему 46 рулевого управления, выполненную с возможностью управления направлением движения внедорожного транспортного средства 10, и систему 48 управления скоростью, выполненную с возможностью управления скоростью внедорожного транспортного средства 10. Кроме того, система 26 управления содержит контроллер 50, соединенный с возможностью обмена данными с первым приемопередатчиком 28, с устройством 34 определения местоположения в пространстве, с системой 46 рулевого управления и с системой 48 управления скоростью. В некоторых вариантах осуществления контроллер 50 может управлять системой 46 рулевого управления и системой 48 управления скоростью для направления внедорожного транспортного средства 10 по запланированной траектории.
[0023] В дополнительных вариантах осуществления контроллер 50 выполнен с возможностью управления системой 46 рулевого управления и системой 48 управления скоростью для направления внедорожного транспортного средства 10 по совмещенной траектории, которая объединяет управляющие сигналы корректирующей траектории, принимаемые от контроллера 52 корректирующей траектории, и запланированной траектории, формируемой контроллером 50, через точки или кривые, принимаемые от базовой станции 22. Контроллер 52 корректирующей траектории выполнен с возможностью приёма текущего состояния транспортного средства (например, положения, скорости, направления, кривизны и т. д.), запланированной траектории и оцененного времени задержки контура управления (например, для оценки состояния транспортного средства, когда транспортное средство активирует изменения управляющих сигналов). Контроллер 52 корректирующей траектории может работать непрерывно для определения, находится ли транспортное средство 10 вне запланированной траектории. Если так, контроллер 52 корректирующей траектории определяет погрешность (например, расстояние между запланированной траекторией и текущим положением транспортного средства 10 или погрешность курса) и формирует непрерывную траекторию для транспортного средства 10, чтобы следовать в точку на запланированной траектории. Контроллер 50 совмещает скорректированную траекторию, принятую от контроллера 52 корректирующей траектории, и запланированную траекторию через точки или кривые, принятые от базовой станции 22, используя весовой коэффициент на основании погрешности (например, посредством совмещения управляющих сигналов запланированной траектории и корректирующей траектории). Контроллер 50 управляет системой 46 рулевого управления и системой 48 управления скоростью для направления внедорожного транспортного средства 10 по совмещенной траектории. Должно быть понятно, что совмещенную траекторию нельзя определить математически, но скорее она является результатом направления транспортного средства 10 с использованием управляющего сигнала, который совмещает управляющие сигналы для запланированной траектории и корректирующей траектории.
[0024] Контроллер 52 корректирующей траектории содержит процессор, такой как проиллюстрированный микропроцессор 54, и запоминающее устройство 56. Контроллер 52 корректирующей траектории также может включать в себя одно или более устройств хранения и/или другие подходящие компоненты. Процессор 54 можно использовать для выполнения программ, таких как программы для формирования корректирующей траектории и так далее. Процессор 54 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных схем (ASICS) или какую-то их комбинацию. Например, процессор 54 может содержать один или более процессоров с сокращенным набором команд (RISC). Запоминающее устройство 56 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (RAM), и/или энергонезависимое запоминающее устройство, такое как ROM. В запоминающем устройстве 56 можно хранить много информации, и его можно использовать для различных целей. Например, в запоминающем устройстве 56 можно хранить выполняемые процессором команды (например, прошивку или программы) для выполнения процессором 54, такие как команды для формирования корректирующей траектории. Устройство (устройства) хранения (например, энергонезависимое запоминающее устройство) могут включать в себя ROM, флеш-запоминающее устройство, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный информационный носитель или их комбинацию. В устройстве (устройствах) хранения можно хранить данные (например, заданные точки, запланированную траекторию и т. д.), команды (например, программы или прошивку для управления внедорожным транспортным средством и т. д.), и любые другие подходящие данные. В некоторых вариантах осуществления задачи контроллера 52 корректирующей траектории и основного контроллера 50 может выполнять единственный контроллер (например, основной контроллер 50).
[0025] В некоторых вариантах осуществления контроллером 50 является электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных из приемопередатчика 28, устройства 34 определения местоположения в пространстве, контроллера 52 корректирующей траектории или их комбинации, среди других компонентов внедорожного транспортного средства 10. В проиллюстрированном варианте осуществления контроллер 50 содержит процессор, такой как проиллюстрированный микропроцессор 58, и запоминающее устройство 60. Контроллер 50 также может содержать одно или более устройств хранения и/или другие подходящие компоненты. Процессор 58 можно использовать для выполнения программ, таких как программы для управления внедорожным транспортным средством 10 и так далее. Кроме того, процессор 58 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных схем (ASICS) или какую-то их комбинацию. Например, процессор 58 может содержать один или более процессоров с сокращенным набором команд (RISC).
[0026] Запоминающее устройство 60 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (RAM), и/или энергонезависимое запоминающее устройство, такое как ROM. В запоминающем устройстве 60 можно хранить много информации, и его можно использовать для различных целей. Например, в запоминающем устройстве 60 можно хранить выполняемые процессором команды (например, прошивку или программы) для выполнения процессором 54, такие как команды для управления внедорожным транспортным средством 10. Устройство (устройства) 60 хранения (например, энергонезависимое запоминающее устройство) может представлять собой постоянное запоминающее устройство (ROM), флеш-запоминающее устройство, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный информационный носитель или их комбинацию. В устройстве (устройствах) 60 хранения можно хранить данные (например, заданные точки, траектории транспортного средства и т. д.), команды (например, программы или прошивку для управления внедорожным транспортным средством и т. д.), и любые другие подходящие данные.
[0027] В проиллюстрированном варианте осуществления система 46 рулевого управления содержит систему 62 регулирования угла колес, дифференциальную тормозную систему 64 и систему 66 векторизации крутящего момента. Система 62 регулирования угла колес может автоматически поворачивать одно или более колес или гусениц внедорожного транспортного средства 10 (например, посредством гидравлических исполнительных механизмов) для направления внедорожного транспортного средства 10 по определенной траектории по полю. В качестве примера, система 62 регулирования угла колес может поворачивать передние колеса/гусеницы, задние колеса/гусеницы и/или промежуточные колеса/гусеницы внедорожного транспортного средства 10 либо отдельно, либо в группах. Дифференциальная тормозная система 64 может независимо изменять тормозное усилие с каждой боковой стороны внедорожного транспортного средства 10 для направления внедорожного транспортного средства 10 по определенной траектории по полю. Аналогично, система 66 векторизации крутящего момента может дифференциально прикладывать крутящий момент от двигателя к колесам и/или гусеницам с каждой боковой стороны внедорожного транспортного средства 10, посредством этого направляя внедорожное транспортное средство 10 по определенной траектории по полю. Несмотря на то, что проиллюстрированная система 46 рулевого управления содержит систему 62 регулирования угла колес, дифференциальную тормозную систему 64 и систему 66 векторизации крутящего момента, должно быть понятно, что в альтернативных вариантах осуществления может содержаться одна или две эти системы в любой подходящей комбинации. В дополнительных вариантах осуществления может содержаться система рулевого управления, имеющая другие и/или дополнительные системы для облегчения направления внедорожного транспортного средства 10 по определенной траектории по полю (например, шарнирно-сочлененная система рулевого управления и т. д.).
[0028] В проиллюстрированном варианте осуществления система 48 управления скоростью содержит систему 68 управления мощностью двигателя, систему 70 управления силовой передачей и систему 72 управления торможением. Система 68 управления мощностью двигателя выполнена с возможностью изменения мощности двигателя для управления скоростью внедорожного транспортного средства 10. Например, система 68 управления мощностью двигателя может изменять настройку дроссельной заслонки двигателя, топливо-воздушную смесь двигателя, синхронизацию двигателя или их комбинацию и/или другие подходящие параметры двигателя для управления мощностью двигателя. Кроме того, система 70 управления силовой передачей может регулировать переключение передачи внутри трансмиссии для управления скоростью внедорожного транспортного средства 10. Кроме того, система 72 управления торможением может регулировать тормозное усилие, посредством этого регулируя скорость внедорожного транспортного средства 10. Несмотря на то, что проиллюстрированная система 48 управления скоростью содержит систему 68 управления мощностью двигателя, систему 70 управления силовой передачей и систему 72 управления торможением, должно быть понятно, что в альтернативных вариантах осуществления может содержаться одна или две эти системы в любой подходящей комбинации. В дополнительных вариантах осуществления может содержаться система 48 управления скоростью, имеющая другие и/или дополнительные системы для облегчения регулирования скорости внедорожного транспортного средства.
[0029] Как описано выше, внедорожное транспортное средство 10 выполнено с возможностью обмена данными с базовой станцией 22 через приемопередатчики 28, 30. В проиллюстрированном варианте осуществления базовая станция 22 содержит контроллер 74, соединенный с возможностью обмена данными с приемопередатчиком 30 базовой станции. Контроллер 74 выполнен с возможностью передачи команд и/или данных во внедорожное транспортное средство 10. Например, контроллер 74 может передавать ряд точек или кривых во внедорожное транспортное средство 10 через приемопередатчики 28, 30, из которых транспортное средство формирует запланированную траекторию.
[0030] В некоторых вариантах осуществления контроллером 74 является электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных от некоторых компонентов базовой станции 22 (например, приемопередатчика 30). В проиллюстрированном варианте осуществления контроллер 74 содержит процессор, такой как проиллюстрированный микропроцессор 76, и запоминающее устройство 78. Процессор 76 можно использовать для выполнения программ, таких как программы для передачи команд и/или данных в контроллер 50 внедорожного транспортного средства и так далее. Кроме того, процессор 76 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных схем (ASICS) или какую-то их комбинацию. Например, процессор 76 может содержать один или более процессоров с сокращенным набором команд (RISC). В запоминающем устройстве 78 можно представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (RAM), и/или энергонезависимое запоминающее устройство, такое как постоянное запоминающее устройство (ROM). В запоминающем устройстве 78 можно хранить много информации, и его можно использовать для различных целей. Например, в запоминающем устройстве 78 можно хранить выполняемые процессором команды (например, прошивку или программы) для выполнения процессором 76, такие как команды для передачи команд и/или данных в контроллер 50 внедорожного транспортного средства.
[0031] В проиллюстрированном варианте осуществления базовая станция 22 содержит пользовательский интерфейс 80, соединенный с возможностью обмена данными с контроллером 74. Пользовательский интерфейс 80 выполнен с возможностью обеспечения данных от внедорожного транспортного средства 10 и/или сельскохозяйственного орудия оператору (например, данных, связанных с работой внедорожного транспортного средства, данных, связанных с работой сельскохозяйственного орудия и т. д.). Пользовательский интерфейс 80 также выполнен с возможностью позволять оператору управлять некоторыми функциями внедорожного транспортного средства 10 (например, пуском и остановкой внедорожного транспортного средства, подавая внедорожному транспортному средству команду следовать по выбранному/запланированному маршруту в поле и т. д.). В проиллюстрированном варианте осуществления пользовательский интерфейс содержит дисплей 82, выполненный с возможностью обеспечения оператору информации, такой как положение внедорожного транспортного средства 10 внутри поля, скорость внедорожного транспортного средства и траектория внедорожного транспортного средства среди других данных. Кроме того, пользовательский интерфейс 80 выполнен с возможностью предупреждения оператора (например, посредством дисплея 82, посредством аудиосистемы и т. д.), если транспортное средство 10 существенно отклоняется от запланированной траектории.
[0032] В проиллюстрированном варианте осуществления базовая станция 22 содержит устройство 84 хранения, соединенное с возможностью обмена данными с контроллером 74. Устройство 84 хранения (например, энергонезависимое запоминающее устройство) может представлять собой постоянное запоминающее устройство (ROM), флеш-запоминающее устройство, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный информационный носитель или их комбинацию. В устройствах 84 хранения можно хранить данные (например, полевые карты, запланированные траектории или маршруты транспортного средства и т. д.), команды (например, программы или прошивку для подачи команд внедорожному транспортному средству и т. д.) и любые другие подходящие данные.
[0033] Несмотря на то, что система 26 управления внедорожным транспортным средством содержит контроллер 50 внедорожного транспортного средства и контроллер 52 корректирующей траектории, должно быть понятно, что в альтернативных вариантах осуществления система 26 управления может содержать контроллер 74 базовой станции. Например, в некоторых вариантах осуществления управляющие функции системы 26 управления можно распределить между контроллером 50 внедорожного транспортного средства, контроллером 52 корректирующей траектории и контроллером 74 базовой станции. В дополнительных вариантах осуществления контроллер 74 базовой станции может выполнять существенную часть управляющих функций системы 26 управления. Например, в некоторых вариантах осуществления приемопередатчик 28 может подавать сигналы приемопередатчику 30. В таких вариантах осуществления приемопередатчик 30 может подавать соответствующие сигналы контроллеру 74 базовой станции, а контроллер 74 базовой станции может определять подходящее действие на основании текущего состояния внедорожного транспортного средства 10 и подавать сигнал, указывающий подходящее действие. Например, контроллер 74 может подавать сигнал пользовательскому интерфейсу 80, подавая команду пользовательскому интерфейсу 80 предупредить оператора об отклонении внедорожного транспортного средства от запланированной траектории 18. Кроме того, контроллер 74 может подавать команды в контроллер 50 внедорожного транспортного средства (например, через приемопередатчики 28 и 30), подавая внедорожному транспортному средству 10 и/или сельскохозяйственному орудию команду выполнения некоторых операций (например, управления направлением движения и/или управления скоростью) для направления внедорожного транспортного средства 10 по запланированной траектории или для направления внедорожного транспортного средства 10 назад на запланированную траекторию.
[0034] Система 26 управления может принимать точки или кривые (например, точки маршрута или навигационные цепочки) и формировать по этим точкам запланированную траекторию. Затем система 26 управления может направлять внедорожное транспортное средство 10 по траекториям (например, по запланированной траектории, корректирующей траектории, совмещенной траектории и т. д.), которые являются непрерывными и содержат один или более сегментов клотоиды. Внедорожное транспортное средство 10 может быть неспособно следовать по запланированной траектории, которая содержит разрывы положения, скорости или ускорения. Соответственно, траектории транспортного средства, принимаемые или формируемые системой 26 управления транспортного средства, могут быть непрерывными в показателях положения, скорости и ускорения. Например, запланированная траектория транспортного средства не содержит кратковременных ступенчатых изменений положения, скорости и ускорения. Траектория может содержать или не содержать ряд сегментов клотоиды, которые непрерывно определяют на основании ряда (например, 1, 3, 5, 10 и т. д.) принимаемых точек впереди транспортного средства и ряда (например, 1, 3, 5, 10 и т. д.) принимаемых точек позади транспортного средства. Конечное положение, направление и кривизна в конце одного сегмента клотоиды совпадает с первоначальным положением, направлением и кривизной следующего сегмента клотоиды. Кроме того, при формировании траекторий, по которым может следовать транспортное средство 10, учитываются ограничения транспортного средства, такие как минимальный радиус поворота и максимальная скорость поворота (например, максимальная скорость разворота). Соответственно, формируемые траектории могут быть непрерывными во второй производной положения («C2 непрерывность») и находятся внутри возможностей транспортного средства 10. Кроме того, при формировании траекторий может быть предпочтительно учитывать стоимость каждой траектории для того, чтобы формировать эффективную траекторию, по которой способно следовать транспортное средство 10.
[0035] На фиг. 3 представлен вид сверху-вниз сегмента 100 запланированной траектории внедорожного транспортного средства. В проиллюстрированном варианте осуществления сегментом 100 траектории является траектория через поворот в конце ряда, который соединяет конец одного ряда с началом другого ряда, избегая в то же время контакта с границей 102 (например, ограждением).
[0036] В представленном варианте осуществления сегмент 100 траектории содержит пять отдельных сегментов 104, 106, 108, 110, 112 клотоиды, которые объединены с образованием непрерывной траектории из начальной точки 114 в конечную точку 116. Сегменты клотоиды, также называемые спирали Корню, определяют как кривые с кривизной, которая линейно изменяется по длине кривой. Иными словами, степень кривизны σ для заданной клотоиды является постоянной. Клотоиды являются C2 непрерывными и могут учитывать физические ограничения, такие как минимальный радиус поворота и максимальная скорость поворота транспортного средства. Клотоиду можно определить, как кривую, имеющую кривизну, которая линейно изменяется по длине кривой. Скорость (
где qiпредставляет начальное направление, κi представляет начальную кривизну, а σ представляет скорость изменения кривизны относительно s, расстояния вдоль клотоиды. Кривизну в качестве функции s можно описать с помощью:
[0037] Направление в качестве функции s можно описать с помощью:
[0038] Таким образом, положение (x(s), y(s)) можно описать с помощью:


где τ представляет длину траектории. Таким образом, сегмент клотоиды может быть основан на начальном положении, xiи yi, начальном направлении, qi, начальной кривизне, κi, степени кривизны, σ, и длине траектории, s. При определении параметров сегментов 104, 106, 108, 110, 112 клотоиды можно учитывать возможности транспортного средства 10 (например, минимальный радиус поворота, максимальную скорость поворота). Например, максимальная скорость поворота (например, максимальная скорость разворота) транспортного средства может быть пропорциональна максимальному значению степени кривизны σ. Минимальный радиус поворота может определять максимальное значение кривизны κ. Должно быть понятно, что сегменты, имеющие постоянную кривизну, представляют собой клотоиды с нулевой степенью кривизны σ. Аналогично, прямолинейные сегменты представляют собой сегменты клотоиды, в которых как кривизна κ, так и степень кривизны σ являются нулевыми. Таким образом, прямолинейные сегменты, сегменты с постоянной кривизной, и сегменты, имеющие постоянную степень кривизны, все можно определить, как сегменты клотоиды. Соответственно, сегмент 100 траектории из пяти сегментов 104, 106, 108, 110, 112 клотоиды можно параметризовать в виде единственного вектора:

[0039] Система 26 управления внедорожным транспортным средством или контроллер 74 базовой станции могут регулировать одно или более из начального положения x; y; начального направления q; начальной кривизны κ; степени кривизны σ; и длины s траектории каждого сегмента 104, 106, 108, 110, 112 таким образом, чтобы сегмент 100 траектории был C2 непрерывным. Сегмент 100 траектории является C2 непрерывным, когда конечное положение, конечное направление и конечная кривизна в конце одного сегмента (например, первого сегмента 104) совпадает с начальным положением, начальным направлением и начальной кривизной в начале продолжающего сегмента (например, второго сегмента 106). Как показано на фиг. 4, конец каждого сегмента 104, 106, 108, 110 выровнен с началом последующего сегмента 106, 108, 110, 112.
[0040] Если транспортное средство 10 находится в начальной точке 114, то текущее состояние транспортного средства можно использовать в качестве начального положения, начального направления и начальной кривизны первого сегмента 104 клотоиды. Наоборот, параметры последнего сегмента 112 можно отрегулировать таким образом, чтобы конечное положение, конечное направление и конечная кривизна последнего сегмента 112 совпадали с конечным положением, конечным направлением и конечной кривизной требуемого выходного состояния. Как описано выше, параметры каждого сегмента 104, 106, 108, 110, 112 регулируют таким образом, чтобы степень кривизны σ не превышала максимальную скорость поворота транспортного средства, и/или кривизна κ не падала ниже минимального радиуса поворота транспортного средства. Кроме того, минимальную длину сегмента (например, 10 сантиметров) можно использовать таким образом, чтобы длина s траектории каждого сегмента 104, 106, 108, 110, 112 оставалась выше минимальной длины сегмента.
[0041] Сегмент 100 траектории также может быть выполнен так, чтобы избегать границ 102 при формировании сегментов 104, 106, 108, 110, 112 клотоиды сегмента 100 траектории и регулировании параметров сегментов. В некоторых вариантах применения орудие 12 может быть шире, чем транспортное средство 10. В таких вариантах осуществления сегмент 100 траектории с каждой стороны сегмента 100 траектории может содержать буферную область 118, которая может быть такой же широкой или шире, чем орудие 12, так что орудие 12 может быть способно пересекать сегмент 100 траектории, не входя в контакт с границей 102.
[0042] На фиг. 4 представлен график 200 кривизны κ C2 сегмента 100 непрерывной траектории, показанной на фиг. 3, в качестве функции длины s траектории. Ось x 202 обозначает расстояние вдоль C2 сегмента 100 непрерывной траектории в метрах. Ось y 202 обозначает кривизну, κ в 1/метр в точке по длине C2 сегмента 100 непрерывной траектории. Необходимо заметить, что кривизна κ сегмента 100 траектории является постоянной по его длине. То есть кривизна κ в конце одного сегмента совпадает с кривизной в начале продолжающего сегмента. Как описано выше, внедорожное транспортное средство может двигаться по C2 непрерывной траектории 100, потому что она не содержит кратковременных изменений кривизны.
[0043] Хотя проиллюстрированный сегмент 100 траектории предназначен для конца поворота ряда, должно быть понятно, что аналогичные способы можно использовать для формирования C2 непрерывной траектории для выполнения любого маневра в поле и что раскрытые методы не ограничены поворотами в конце ряда. Аналогично, хотя проиллюстрированный сегмент 100 траектории содержит пять сегментов, такие же методы можно применять для создания траектории, которая соединяет любое количество сегментов. Например, в некоторых вариантах осуществления сегмент 100 траектории может быть составлен из любого количества сегментов (например, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 50, 100 сегменты или более).
[0044] Как описано выше, траекторию могут формировать компоненты на внедорожном транспортном средстве. Траектория может проходить через точки или кривые (например, навигационные цепочки или точки маршрута), переданные во внедорожное транспортное средство (например, через приемопередатчики). Например, траектория может проходить через одну точку позади транспортного средства и пять точек впереди транспортного средства. В дополнительных вариантах осуществления траекторию можно формировать заранее и сохранять на базовой станции (например, в запоминающем элементе или устройстве хранения) и передавать во внедорожное транспортное средство (например, через приемопередатчики). Для определения эффективной траектории среди группы возможных C2 непрерывных траекторий каждой траектории можно присвоить стоимость. Стоимости могут включать в себя время завершения траектории, потребляемое транспортным средством топливо во время прохождения траектории и износ транспортного средства во время прохождения по траектории. Стоимости могут соответствовать длине траектории, форме траектории (кривизне и степени кривизны) и топологическим и/или физическим свойствам пересекаемых поверхностей.
[0045] Например, время, необходимое транспортному средству для прохождения по траектории зависит от скорости, с которой транспортное средство движется по траектории. Вектор клотоидного сплайна уравнения 7 четко не определяет скорость транспортного средства, однако скорость транспортного средства может быть основана на максимальной скорости транспортного средства, максимальной угловой скорости поворота рулевого колеса, максимальном центростремительном ускорении (например, для регулирования пробуксовки, для повышения устойчивости и т. д.) или их комбинации. После определения требуемой скорости, основанной на этих факторах, можно определить время движения транспортного средства по траектории. Чтобы получить эффективную траекторию, длину и форму траектории можно регулировать.
[0046] Траектория может представлять собой непрерывную линию или скопление отдельных точек. Как описано выше, запланированную траекторию может формировать система управления на внедорожном транспортном средстве, или ее можно формировать где-то еще (например, на базовой станции) и хранить на транспортном средстве. В некоторых случаях транспортное средство может отклоняться от запланированной траектории транспортного средства. Это отклонение может происходить вследствие ввода оператором данных, полевых условий или по какой-то другой причине. В таких случаях внедорожное транспортное средство может формировать дополнительную траекторию из своего текущего положения в точку на запланированной траектории. На фиг. 5 представлено схематичное изображение внедорожного транспортного средства 10, находящегося в местоположении 250 на расстоянии 252 (например, расстоянии бокового отклонения) от запланированной траектории 18, и корректирующей траектории 254 в точку 256 на запланированной траектории 18. Запланированная траектория 18 проходит через ряд точек 256, 258, 260, 262, 264, (например, точек маршрута или навигационных цепочек), которые были приняты от базовой станции 22. В других вариантах осуществления от базовой станции 22 можно принимать кривые. Как будет описано более подробно в связи с фиг. 6, контроллер корректирующей траектории на внедорожном транспортном средстве 10 непрерывно (например, каждые 0,1, 0,2, 0,5, 1, 1,5, 2, 3, 4, 5, 7, 10 секунд и т. д.) обновляет корректирующую траекторию 254 из текущего местоположения 250 в одну из точек 256 на запланированной траектории 18. Основной контроллер взвешивает запланированную траекторию 18 и корректирующую траекторию 254 на основании погрешности (например, 95/5, 90/10, 80/20, 70/30, 60/40, 50/50, 40/60, 30/70, 20/80, 10/90, 5/95 и т. д.), которая соответствует расстоянию 252 между текущим местоположением 250 транспортного средства и запланированной траекторией 18. Если транспортное средство 10 находится на запланированной траектории 18 или очень близко к ней, основной контроллер будет давать корректирующей траектории 254 очень маленький или нулевой весовой коэффициент. Если расстояние 252 между транспортным средством 10 и запланированной траекторией 18 большое, основной контроллер будет давать корректирующей траектории 254 значительный весовой коэффициент. Взвешенное совмещение запланированной траектории 18 и корректирующей траектории 254 (или управляющих сигналов для каждой траектории 10, 254) приводит к совмещенной траектории. В некоторых вариантах осуществления совмещенную траекторию можно определить, как траекторию, по которой транспортное средство 10 движется, используя управляющий сигнал, который совмещает управляющие сигналы, которые соответствуют запланированной траектории 18 и корректирующей траектории 254. В других вариантах осуществления совмещенную траекторию можно определить посредством совмещения запланированной траектории 18 и корректирующей траектории 254. В некоторых вариантах осуществления корректирующая траектория 254 или совмещенная траектория может проходить через следующую точку 260 по траектории 18 или другую точку по траектории 18. В других вариантах осуществления, например, в варианте осуществления, проиллюстрированном на фиг. 5, транспортное средство может перескочить одну или более следующих точек 260, потому что для прохода через следующие точки потребовалось бы сложная корректировка. Основной контроллер управляет (например, согласно совмещенному управляющему сигналу) различными системами транспортного средства (например, системой рулевого управления и системой управления скоростью) для направления транспортного средства 10 по совмещенной траектории назад на запланированную траекторию 18.
[0047] На фиг. 6 представлена блок-схема процесса 300 возврата внедорожного транспортного средства на запланированную траекторию 18. Как описано выше, запланированную траекторию формируют на основе точек (например, точек маршрута или навигационных цепочек), принимаемых от базовой станции. В блоке 302 принимают запланированную траекторию 18, текущее состояние 304 транспортного средства и оцененную задержку 306 в контуре управления. В других вариантах осуществления система управления внедорожного транспортного средства может принимать запланированную траекторию 18 от базовой станции или из какого-то другого источника. В некоторых вариантах осуществления запланированную траекторию 18 можно хранить в памяти в системе управления внедорожного транспортного средства. Текущее состояние 304 транспортного средства можно принимать от устройства определения местоположения в пространстве или определять на основе выходных сигналов от устройства определения местоположения в пространстве. В некоторых вариантах осуществления текущее состояние 304 транспортного средства также можно принимать от базовой станции. Оцененная задержка 306 означает задержку в контуре управления. На основании оцененной задержки 306 и текущего состояния 304 транспортного средства (например, положения, скорости и направления транспортного средства) система управления внедорожного транспортного средства может прогнозировать положение внедорожного транспортного средства во время приведения в действие различных систем внедорожного транспортного средства (например, системы рулевого управления и системы управления скоростью) таким образом, чтобы формировать управляющие сигналы для прогнозируемого будущего состояния транспортного средства, а не для текущего состояния транспортного средства.
[0048] В блоке 308 корректирующую траекторию 254 формируют для направления внедорожного транспортного средства из его текущего положения в точку на запланированной траектории 18 впереди внедорожного транспортного средства в направлении движения. Корректирующая траектория 254 может проходить через точку вдоль траектории транспортного средства позади внедорожного транспортного средства и одну или более точек впереди внедорожного транспортного средства по запланированной траектории 18, которые были приняты от базовой станции. Корректирующая траектория 254 может содержать один или более сегментов клотоиды и может иметь постоянную кривизну (например, корректирующая траектория 254 может быть C2 непрерывной). Аналогично, корректирующую траекторию 254 можно формировать таким образом, чтобы переход между корректирующей траекторией 254 и запланированной траекторией 18 был C2 непрерывным, так чтобы при достижении запланированной траектории 18 транспортное средство могло продолжать следующую запланированную траекторию 18. Корректирующую траекторию 254 может формировать контроллер корректирующей траектории внедорожного транспортного средства, другой компонент на внедорожном транспортном средстве, базовая станция, какое-то другое устройство или их комбинация. Корректирующую траекторию 254 можно формировать или не формировать, используя методы, аналогичные методам формирования траектории транспортного средства, описанным в связи с ФИГ. 3 и 4.
[0049] В блоке 310 корректирующую траекторию 254 можно совместить с запланированной траекторией 18 с образованием совмещенной траектории 312. Должно быть понятно, что можно совместить управляющие сигналы, соответствующие корректирующей траектории 254 и запланированной траектории 18, или вместе можно совместить сами траектории. Соответственно, совмещенную траекторию 312 можно опосредованно определить, как траекторию движения транспортного средства, когда для направления транспортного средства используют совмещенный управляющий сигнал. В других вариантах осуществления совмещенную траекторию можно математически определить посредством совмещения запланированной траектории 18 и корректирующей траектории 254. Совмещение между корректирующей траекторией 254 и запланированной траекторией может быть по меньшей мере частично основано на присвоенных весовых коэффициентах, которые по меньшей мере частично основаны на погрешности местоположения транспортного средства от запланированной траектории 18. Например, если транспортное средство находится на существенном расстоянии от запланированной траектории 18, корректирующей траектории 254 можно присвоить существенно больший весовой коэффициент, чем запланированной траектории 18, таким образом, чтобы совмещенная траектория 312 была ближе к корректирующей траектории 254, чем запланированная траектория 18. Если транспортное средство находится на запланированной траектории 18 или близко к ней, корректирующей траектории 254 можно задать очень маленький весовой коэффициент по сравнению с запланированной траекторией 18, так чтобы совмещенная траектория 312 была ближе к запланированной траектории 18, чем корректирующая траектория. Например, запланированная траектория 18 и корректирующая траектория 254 могут иметь весовые коэффициенты 95/5, 90/10, 80/20, 70/30, 60/40, 50/50, 40/60, 30/70, 20/80, 10/90, 5/95 и т. д. Для образования совмещенной траектории 312 погрешность может составлять до нескольких дюймов и до многих футов. Как и корректирующая траектория 254 совмещенная траектория 312 может проходить через точку по траектории транспортного средства позади внедорожного транспортного средства и одну или более точек впереди внедорожного транспортного средства по запланированной траектории 18. Совмещенная траектория 312 может содержать один или более сегментов клотоиды и может иметь постоянную кривизну (например, совмещенная траектория 312 может быть C2 непрерывной). Переход между совмещенной траекторией 312 и запланированной траекторией 18 может быть C2 непрерывным, так чтобы при достижении запланированной траектории 18 транспортное средство продолжало следующую запланированную траекторию 18.
[0050] В блоке 314 внедорожное транспортное средство направляют по совмещенной траектории 312 (например, используя совмещенный управляющий сигнал) в точку на запланированной траектории 18 впереди внедорожного транспортного средства. Например, система управления внедорожного транспортного средства может управлять системой рулевого управления и системой управления скоростью внедорожного транспортного средства для направления внедорожного транспортного средства по совмещенной траектории 312 назад на запланированную траекторию 18. Затем в способе 300 может быть возврат в блок 302 и отслеживание текущего состояния 304 транспортного средства по отношению к запланированной траектории 18. В способе 300 можно беспрестанно обновлять корректирующую траекторию 254, совмещенную траекторию 312 или обе на основании положения внедорожного транспортного средства относительно запланированной траектории 18.
[0051] Автономные или полуавтономные внедорожные транспортные средства могут отклоняться от запланированной траектории вследствие ввода оператором данных, полевых условий, препятствий или по какой-то другой причине. Методы формирования траектории транспортного средства можно использовать для формирования корректирующей траектории назад на запланированную траекторию и совмещения корректирующей траектории и запланированной траектории с созданием совмещенной траектории. Затем транспортное средство можно направить по совмещенной траектории назад на запланированную траекторию. Корректирующая траектория и и/или совмещенная траектория может содержать один или более сегментов клотоиды и может быть C2 непрерывной или иным образом иметь постоянную кривизну, так чтобы транспортное средство могло двигаться по траектории назад на запланированную траекторию.
[0052] При том, что в данном документе были проиллюстрированы и описаны лишь некоторые признаки изобретения, специалистами в данной области техники будут предусмотрены множество модификаций и изменений. Вследствие этого, следует понимать, что прилагаемая формула изобретения подразумевает охват всех таких модификаций и изменений, которые находятся в пределах истинной сущности изобретения.
Реферат
Группа изобретений относится к сельскому хозяйству. Система отслеживания полосы для внедорожного транспортного средства содержит систему управления, содержащую процессор и запоминающее устройство. Система управления выполнена с возможностью приёма множества точек местоположения транспортного средства и текущего состояния транспортного средства, при этом текущее состояние транспортного средства содержит текущее местоположение транспортного средства. Система управления выполнена с возможностью формирования запланированной траектории транспортного средства через одну или более из множества точек местоположения транспортного средства, формирования корректирующей траектории из текущего местоположения транспортного средства в точку по запланированной траектории транспортного средства вперед от текущего местоположения транспортного средства в направлении движения, формирования совмещенной траектории посредством совмещения запланированной траектории транспортного средства и корректирующей траектории по меньшей мере частично на основании присвоенного весового коэффициента, при этом присвоенный весовой коэффициент по меньшей мере частично основан на погрешности курса, расстоянии между текущим местоположением транспортного средства и запланированной траекторией или их сочетании. Система управления выполнена с возможностью направления внедорожного транспортного средства по совмещенной траектории. Внедорожное транспортное средство содержит систему рулевого управления, выполненную с возможностью управления направлением движения внедорожного транспортного средства, систему управления скоростью, выполненную с возможностью управления скоростью движения внедорожного транспортного средства, устройство определения местоположения в пространстве, выполненное с возможностью определения текущего состояния транспортного средства для внедорожного транспортного средства и систему управления. Система управления выполнена с возможностью приёма множества точек местоположения транспортного средства, формирования запланированной траектории транспортного средства через одну или более из множества точек местоположения транспортного средства, приёма текущего состояния транспортного средства от устройства определения местоположения в пространстве, при этом текущее состояние транспортного средства содержит текущее местоположение транспортного средства. Система управления выполнена с возможностью формирования корректирующей траектории из текущего местоположения транспортного средства в одну из множества точек местоположения транспортного средства по запланированной траектории транспортного средства вперед от текущего местоположения транспортного средства в направлении движения, формирования совмещенной траектории посредством совмещения запланированной траектории транспортного средства и корректирующей траектории по меньшей мере частично на основании присвоенного весового коэффициента, при этом присвоенный весовой коэффициент по меньшей мере частично основан на погрешности курса, расстоянии между текущим местоположением транспортного средства и запланированной траекторией или их сочетании. Система управления выполнена с возможностью управления системой рулевого управления и системой управления скоростью для направления внедорожного транспортного средства по совмещенной траектории. Способ отслеживания полосы для внедорожного транспортного срелства содержит этапы, на которых принимают посредством системы управления множество точек местоположения транспортного средства, текущее состояние транспортного средства и время задержки цепи обратной связи, при этом текущее состояние транспортного средства содержит текущее местоположение транспортного средства. Далее формируют посредством системы управления запланированную траекторию транспортного средства через одну или более из множества точек местоположения транспортного средства, формируют посредством системы управления корректирующую траекторию из текущего местоположения транспортного средства в одну из множества точек местоположения транспортного средства по запланированной траектории транспортного средства вперед от текущего местоположения транспортного средства в направлении движения, формируют посредством системы управления совмещенную траекторию путём совмещения запланированной траектории транспортного средства и корректирующей траектории по меньшей мере частично на основании присвоенного весового коэффициента, при этом присвоенный весовой коэффициент по меньшей мере частично основан на погрешности курса, расстоянии между текущим местоположением транспортного средства и запланированной
Комментарии