Ультразвуковое локационное устройство для автоматической системы управления движением - RU2248006C2
Код документа: RU2248006C2
Чертежи
Описание
Область техники
Изобретение относится к локационному устройству для определения местоположения границы обработки, в частности кромки, убираемой сельскохозяйственной культуры, локационный сигнал которого подводится в качестве регулирующей величины к электрически управляемому устройству управления движением сельскохозяйственной машины. Локационное устройство включает первый, состоящий из передатчика и приемника, локатор, зона отражения которого лежит на еще не обработанной, в частности еще не убранной, площади, и второй, состоящий из передатчика и приемника, локатор, зона отражения которого перекрывает с двух сторон кромку обработки, при этом приемный сигнал второго локатора, отнесенный к приемному сигналу первого локатора и нормированный, служит для получения регулирующей величины управления движением.
Уровень техники
Подобное локационное устройство для автоматического управления движением машины известно из патентного документа ФРГ №19508941 А1. В этом устройстве имеется третий локатор, передатчик и приемник которого направлены на обработанное поле, и который служит для генерирования дальнейших базовой и нормированной величин. Однако при меняющихся характеристиках отражения обработанного поля, например, из-за различно лежащей на стерне соломы или при попадании в зону отражения полевого дренажа, происходит слишком большое искажение сигналов и, соответственно, нестабильное управление движением. Фокусировка и ориентация различных локаторов в известном устройстве выполнены таким образом, что их зоны отражения в значительной степени независимы друг от друга и не имеют перекрестной модуляции.
Далее, из патентного документа ФРГ №19508942 А1 известны различные локационные устройства для управления движением, включающие два локатора, каждый из которых состоит из передатчика и приемника. Одно из этих устройств работает с двумя расходящимися плотно сфокусированными световыми лучами. В отрегулированном положении один из лучей падает на обработанное, а другой на необработанное поле, и их отраженные лучи в соответствии с их временем прохождения при отклонениях используются для двухточечного регулирования. Принимаемый сигнал второго локатора, отнесенный к принимаемому сигналу первого локатора и нормированный, служит для создания регулирующей величины, которая и подается на электрически управляемое устройство управления движением сельскохозяйственной машины. Это устройство является наиболее близким к заявляемому и принято в качестве прототипа. Недостатком известного устройства является возникновение нежелательных маятниковых колебаний машины вдоль заданной траектории при движении машины.
Кроме того, в этом патентном документе описано ультразвуковое локационное устройство с одним комплектом передатчика и приемника, зона отражения которого перекрывает в обе стороны кромку обработки. Указанное устройство использует различное время прохождения отраженных сигналов от высокой зерновой культуры и от низкой стерни. Однако в тех случаях, когда верхняя поверхность зерновой культуры меняется, и она то высоко стоит, то низко лежит, или стебли и колосья культуры направлены в разные стороны, становится невозможным выделить отраженные сигналы, и процесс управления движением выходит из под контроля, так как отсутствует базовая величина.
Сущность изобретения
Задачей, на решение которой направлено настоящее изобретение, является усовершенствование устройства описанного типа таким образом, чтобы оно обеспечивало равномерное управление движением при переменных характеристиках отражения необработанного поля.
Поставленная задача решена в локационном устройстве для определения местоположения границы обработки, в частности кромки, зерновой культуры, локационный сигнал которого подается в качестве регулирующей величины на электрически управляемое устройство управления движением сельскохозяйственной машины, с первым, состоящим из передатчика и приемника, локатором, зона отражения которого лежит в основном на еще не обработанном, в частности не убранном, поле и со вторым, состоящим из другого передатчика и другого приемника, локатором, зоны отражения которого направлены на кромку обработки с обеих сторон с перекрытием, причем принимаемый сигнал второго локатора, связанный с приемным сигналом первого локатора посредством сравнения и нормирования, служит для создания указанной регулирующей величины, причем согласно изобретению зоны отражения обоих локаторов частично перекрываются между собой.
Предпочтительно, оба передатчика управляются одновременно с синхронным импульсом передачи, вследствие чего оба приемника воспринимают отраженные от необработанного поля принимаемые сигналы, идущие от обоих передатчиков, в суперпозиции.
Для зерноуборочного комбайна была установлена предпочтительность расположения локаторов таким образом, что один из них отслеживает верхнюю поверхность колосьев поля зерновой культуры, а второй отслеживает кромку обработки с ее перекрытием. При этом сигнал первого локатора определяет нормирование и создает базовую величину, а более низкая часть сигнала второго локатора, которая создается от более узкой, прилегающей к зерновой культуре зоны, перерабатывается далее в нормированном виде в сигнал регулирования для управления движением.
В оптимальном исполнении охватываемые локаторами зоны стерни и зерновой культуры удалены от уборочной машины настолько, чтобы выработанный из отдельных частей сигналов нормированный локационный сигнал за счет компенсирующего эффекта имел малую зависимость от неровностей трассы, особенно от волнистой поверхности земли и от поперечных и продольных наклонов сельскохозяйственной машины или ее режущего аппарата.
Локатор, который считывает кромку обработки, предпочтительно ориентирован таким образом, что он охватывает зону, находящуюся в нескольких метрах от режущего аппарата сельскохозяйственной машины, так как управление движением этих машин производится путем рулевого поворота задних колес, и отклонение от заданной траектории движения может быть откорректировано только на протяжении большого участка пути.
При такой компоновке была установлена целесообразность ввода в регулирующее устройство сигнала действительной угловой установки колес в качестве еще одной входной величины, так что дальнейшая траектория движения определяется с учетом этого исходного сигнала. Нормированный локационный сигнал и сигнал угловой установки колес, предпочтительно, являются входными сигналами регулирующего устройства, формирующими необходимые величины регулирования.
Установлено, что при работе обычных зерноуборочных комбайнов около 60% внимания водителя уделяется рулению. Руление особенно утомительно из-за того, что управление посредством поворота задних колес требует довольно продолжительного времени на изменение бокового положения зерноуборочного комбайна по отношению к кромке обработки, и после этого еще требуется соответствующее обратное управление для выпрямления траектории движения. Автоматическое управление движением делает возможным при практически полном освобождении водителя от этой нагрузки более быстрое движение машины и близкую к полной загрузку режущего аппарата по ширине вплоть до кромки безопасности шириной около 10 см.
Локаторы, предпочтительно, являются ультразвуковыми аппаратами с передатчиком и приемником. Локационные датчики снабжены средствами фокусировки и охватывают пространственный угол, составляющий около 7° на половине дальности действия и около 14° на 90%-ной дальности действия. Изобретателями установлена целесообразность расположения локационных датчиков вблизи боковой кромки режущего аппарата на высоте примерно от 1,5 до 2,5 м над зерновой культурой. Первый локационный датчик направлен своей зоной восприятия на зерновую культуру по достаточно косой линии по отношению к кромке обработки. Пространственный угол создает охватываемую зону отражения диаметром примерно 0,5 м. Охватываемые зоны отражения обоих локаторов перекрывают друг друга примерно наполовину. Это достигается при поперечном расхождении осей расположенных рядом передатчиков-приемников примерно на 5°, если локаторы расположены вплотную друг к другу.
Предпочтительно производить синхронное импульсное управление ультразвуковыми передатчиками так, чтобы исходящие от обоих передатчиков сигналы, отраженные от области перекрытия зон отражения, непосредственно прилегающей к кромке обработки, поступали на приемники почти одновременно с наложением, что повышает мощность принимаемых сигналов при более умеренной мощности передаваемых импульсов.
Часть отраженных сигналов поступает от обработанного участка поля, в частности от стерни. Однако сигналы этой части обычно поступают на приемник позже по времени и поэтому могут быть выделены посредством дальнейшей обработки. При очень плоско лежащей зерновой культуре выделение по времени отраженных сигналов от зерновой культуры и от стерни может оказаться недостаточным. Однако здесь помогает то, что отраженный от плотной зерновой растительности сигнал значительно сильнее сигнала от рыхлой стерни.
Расположенный со стороны зерновой культуры локатор воспринимает полностью отраженный сигнал собственного передатчика и примерно половину сигнала от соседнего передатчика. Тот приемник, зона отражения которого включает кромку обработки, воспринимает от неубранной, примерно половинной зоны отраженный сигнал собственного передатчика и от соседнего передатчика также примерно половину отраженного сигнала. Таким образом, если заданная величина приемного сигнала этого комбинированного отраженного сигнала после нормирования установлена как 2/3 от приемного сигнала на другом приемнике, сигнал которого принят за 100%-ную нормирующую величину, то какие-либо отклонения от этой относительной величины могут использоваться непосредственно как сигналы регулирования для управления движением или же подаваться на более сложное устройство регулирования для дальнейшей обработки.
Очень полезное устройство сигнализации служит для регулирования наклона локационного устройства из двух локаторов, которые предпочтительно размещены в общем корпусе с заданным расхождением осей. При установке локационного устройства на предварительно заданной высоте и на предварительно заданном расстоянии над кромкой обработки при правильной ориентации локационного устройства, во-первых, в пределах предварительно установленного временного окна должна поступать ранняя часть отраженных сигналов от стоящей зерновой культуры и более поздняя часть отраженных сигналов от стерни. Во-вторых, оба ранних подлежащих корреляции отраженных сигнала должны находиться в заданном поле допуска относительно предварительно заданного соотношения величин, например, от 1/2:1 до 2/3:1. Выдерживание обоих названных критериев проверяется при испытаниях или в рабочем порядке с сигнализацией об их соблюдении или несоблюдении.
Изобретателями выявлена целесообразность регулирования высотного положения локационного устройства от 1,5 до 2,5 м. Изменение высотного положения производится в простейшем случае вручную ступенчато посредством телескопической опоры или же для этого предусмотрено механизированное устройство регулирования, управляемое с пульта управления.
Установочная настройка наклона локационного устройства легко производится вручную при наличии крепления с помощью зажимного хомута. Предпочтительно, воображаемая ось передатчика-приемника пересекает на удалении от 4 до 6 м поверхность земли или верхнюю поверхности стерни при высокой стерне.
Предпочтительно предусмотреть координацию регулирования высотного положения с регулированием наклона, которые могут осуществляться с помощью механических средств, как это уже было изложено. При этом комбинированном установочном регулировании не требуется отдельного механизированного регулирования наклона.
Вылет несущих опор установки локационного устройства вбок от мотовила и вперед должен быть таким, чтобы не возникало никаких возмущений отраженного сигнала от области срезания и сбора.
Несущие опоры локационного устройства предпочтительно выполнены в виде шарнирного четырехугольника, который при подъеме или опускании изменяет наклон локационного устройства. При этом обеспечивается, чтобы при установке на большей высоте, которая выбирается для более высокой растительности, локационное устройство было наклонено круче, а при более низкой установке для низкой растительности оно было наклонено более полого с тем, чтобы ближний отраженный сигнал от растительности и дальний отраженный сигнал от стерни приходили с примерно одинаковым отставанием по времени.
Перечень фигур чертежей
Далее изобретение поясняется на примерах осуществления со ссылками на чертежи, на которых:
фиг.1 изображает на виде сверху зерноуборочный комбайн с устройством управления его движением,
фиг.2 изображает вид сбоку по фиг.1,
фиг.3 изображает схему устройства управления движением,
фиг.4 изображает устройство в поперечном разрезе.
Примеры осуществления изобретения
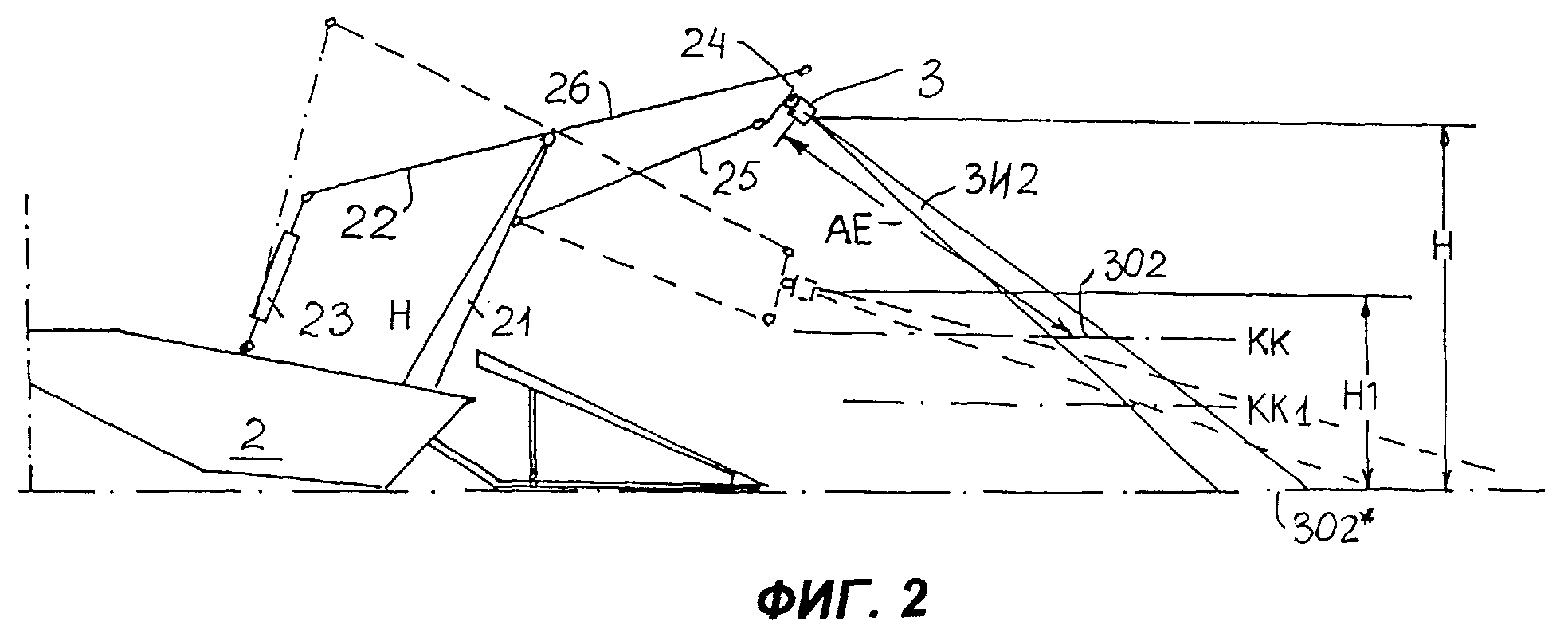
На фиг.1 изображен зерноуборочный комбайн 1 с режущим аппаратом 2, который должен автоматически направляться для следования вдоль кромки КК зерновой культуры на зерновом поле ЗП с выдерживанием малых отклонений от предварительно заданного поперечного положения ПП относительно кромки КК зерновой культуры. Над режущим аппаратом 2 у его передней стороны расположено регулируемое по высоте локационное устройство 3, состоящее из двух локаторов 4, 5. Зоны ЗИ1, ЗИ2 излучения локаторов 4, 5 направлены на зоны ЗО1, ЗО2, ЗО2* отражения, расположенные отдельно, но с частичным перекрытием на обработанном поле, на зерновом поле ЗП и на кромке КК зерновой культуры, а их принимаемые локационные сигналы ЛС1, ЛС2 подаются на регулирующее устройство 6. Эти локационные сигналы подвергаются преобразованию в цифровую форму и далее преобразуются в нормированный локационный сигнал НЛС. При этом первый локационный сигнал ЛС1, поступающий в основном от зернового поля ЗП, используется для определения нормированной зоны. Далее определяется частичная величина первого локационного сигнала ЛС1 в качестве базовой величины для отнесения к ней второго локационного сигнала ЛС2 от второй зоны ЗО2 отражения, которая находится в зоне вблизи зернового поля ЗП.
В представленном примере осуществления регулирующее устройство 6 посредством стандартизированной шины 7 данных связано с центральным процессором 8. На центральном процессоре 8 предусмотрены клавиатура ввода 9 и выходное устройство 10. Кроме того, центральный процессор 9 принимает сигнал СС скорости от передних колес 11. От регулирующего устройства 6 осуществляется управление гидравлическим устройством 12 управления движением посредством электромагнитного управления левым управляющим клапаном 13 и правым управляющим клапаном 14, гидравлические выходы которых подсоединены к гидравлическому устройству 12 управления движением, воздействующему на поворот задних колес. От гидравлического устройства 12 управления движением в регулирующее устройство 6 поступает сигнал СУК угловой установки колес. Управляющие клапаны 13, 14 выполнены обладающими автономной надежностью, то есть подпружиненными нормально закрытыми, так что при отсутствии электрического тока они надежно заперты. В этом состоянии управление движением осуществляется непосредственно рулем 15 через обычную систему рулевого управления. В кабине оператора машины расположены также ручной рычаг 16 переключения, педаль 17 и аварийный переключатель 18, сигналы которых подводятся к системе управляющих клапанов и в регулирующее устройство 6 для его активизации при поступлении этих сигналов.
Следует указать, что расстояние упреждения, с которым локационная зона ЗИ2 излучения считывает кромку КК зерновой культуры, примерно соответствует расстоянию между передними колесами 11 и задними колесами 19. За счет этого угловое отклонение оси зерноуборочного комбайна от кромки зерновой культуры, представленное в виде компоненты в локационном сигнале, является эквивалентом сигнала угловой установки колес. Эта текущая угловая компонента зоны локационного сигнала накладывается на компоненту бокового отклонения оси направления движения зерноуборочного комбайна от заданного пути, то есть компоненту, которая вводит боковое положение относительно кромки зерновой культуры.
Локационное устройство 3 предпочтительно вводит свой нормированный сигнал НЛС в регулирующее устройство 6. Другие датчики для получения остальных входных величин установлены на комбайне в различных местах и передают сигналы через соответствующие устройства цифрового преобразования и вычисления. Разумеется, непосредственно на местах расположения датчиков могут быть установлены также нормирователи сигналов.
На управляемых задних колесах 19 расположен датчик 20 положения управляемых колес, вырабатывающий сигнал СУК угловой установки колес, который используется соответствующим образом в качестве входного сигнала для регулятора управления движением. При этом была доказана целесообразность связывать между собой компенсирующим образом нормированный локационный сигнал НЛС и отнесенный к нормированному локационному сигналу сигнал СУК угловой установки колес с подачей результата к устройству сравнения с допускаемой величиной, который вырабатывает соответствующую величину ВР регулирования. Указанная величина ВР регулирования преобразуется соответственно в левый или правый сигнал ЛГС, ПГС гидравлического регулирования и подается на левый или правый управляющий клапан 13, 14 соответственно.
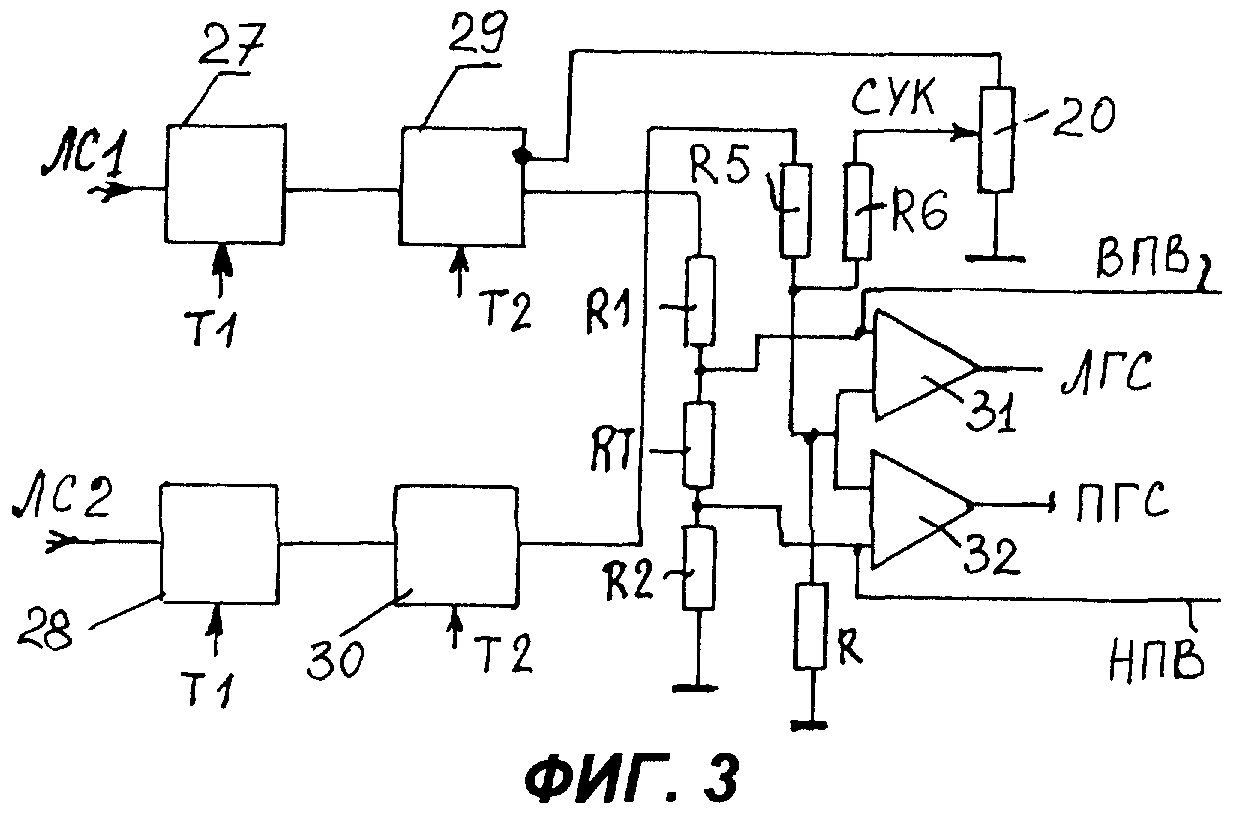
На фиг.2 представлен на виде сбоку режущий аппарат 2 зерноуборочного комбайна 1 в области кромки КК зерновой культуры и локационной зоны ЗИ2 излучения. Соответствующий локатор 5 вместе с другим локатором расположен на опорном элементе с возможностью регулирования по высоте Н от 1,5 до 2,5 над землей в передней области над колосоподъемником режущего аппарата. Локационная зона ЗИ2 излучения косо падает частично на землю и стерню и частично на растительность вблизи кромки КК зерновой культуры. Пространственный угол охватываемой локационной зоны излучения составляет около 7° для 50%-ной части сигналов и около 14° для 90%-ной части сигналов.
Угол наклона выбран таким, что зона ЗО2 отражения от зерновой культуры вызывает различимо более ранний отраженный сигнал, чем зона ЗО2* отражения от земли. Кроме того, при движении через холм должно обеспечиваться получение надежно различимых отраженных сигналов в обеих зонах ЗО2, ЗО2* без ухода вдаль акустического пучка.
При низко расположенной кромке КК1 локационную головку устанавливают ниже на высоте Н1. Ее наклон при этом получается несколько более плоским, так что обе зоны отражения дают почти одинаковое время прохождения отраженного сигнала, а отраженные сигналы имеют сходные амплитуды.
Вследствие того, что оба локатора всегда устанавливаются одинаковым образом на высоте с соответствующим ей наклоном, всегда создается примерно одинаковое соотношение принимаемых сигналов по времени и величине.
Поскольку зоны отражения обоих локаторов частично перекрываются, а в остальном непосредственно примыкают друг к другу, соотношение характеристик отражения сохраняется независимо от того, идет ли сильное отражение от полных колосьев, обращенных к акустическому пучку, или слабое отражение от стеблей, наклоненных от датчика. На этом основании отраженный сигнал от первого локатора служит в качестве 100%-ного нормирующего сигнала для более ранней составляющей части сигнала второго локатора, которая поступает также от зернового поля.
При заданном ориентировании локатора к кромке зерновой культуры и при правильном управлении движением машины ожидаемый отраженный сигнал от направленного на кромку акустического пучка составляет примерно от 1/2 до 2/3 величины базового отраженного сигнала на другом приемнике. Отраженные сигналы интегрируют в пределах соответствующего временного окна с тем, чтобы выровнять колебания вследствие разнородной структуры зоны отражения и улучшить возможности их сравнения. Предпочтительно, предварительно задают верхнюю и нижнюю пороговые величины для относительной высоты амплитуды интегрированного более раннего отраженного сигнала, и переход вверх или вниз через пороговые величины используется для генерирования сигнала регулирования.
В простейшем варианте управления движением указанный сигнал перехода через верхнюю или нижнюю пороговую величину используется непосредственно как левый или правый сигнал управления клапанами с электромагнитным управлением для подвода гидравлической жидкости к гидравлическому цилиндру управления поворотом.
Предпочтительно, в работающем более точно двухступенчатом устройстве управления отклонение нормированного сигнала от заданной величины базового сигнала вводится в качестве задаваемого сигнала в следующую ступень регулирования, в которую сигнал угловой установки колес вводится в качестве сигнала действительного положения. В том случае, когда результирующий сигнал разности выходит за пределы верхней или нижней пороговой величины, этот сигнал перехода используется для дифференциальной подстройки гидравлического устройства управления движением. Предпочтительно, гидравлическое устройство управления движением оснащено обычным образом дополнительным устройством недорегулирования с пропорциональной характеристикой.
Формирование устройства управления движением посредством цифровых вычислительных блоков обеспечивает возможность полного интегрирования системы управления движением в остальную цифровую систему управления зерноуборочного комбайна. Посредством простого ввода параметров на центральном пульте управления уборочной машины в процессор вводят параметры, в частности, пороговые величины; само устройство управления движением по своей базовой структуре является полностью нейтральным.
В качестве примера представлен вариант выполнения устройства регулирования высотного положения для подъема локационного устройства 3 на большую высоту Н и опускания его до малой высоты Н1. На жесткой несущей стреле 21 установлен поворотный рычаг 22, связанный с устройством 23 высотной регулировки и одним своим плечом образует часть шарнирного четырехугольника, на переднем звене 24 которого смонтировано локационное устройство 3. Шарнирный четырехугольник выполнен таким образом, что ось локационного устройства 3 на переднем звене 24 наклоняется тем круче, чем больше высота подъема устройства, например, за счет того, что нижнее звено 25 четырехугольника выполнено короче верхнего звена 26. В показанном штриховыми линиями нижнем положении акустический пучок направлен на низкую кромку КК1 зерновой культуры.
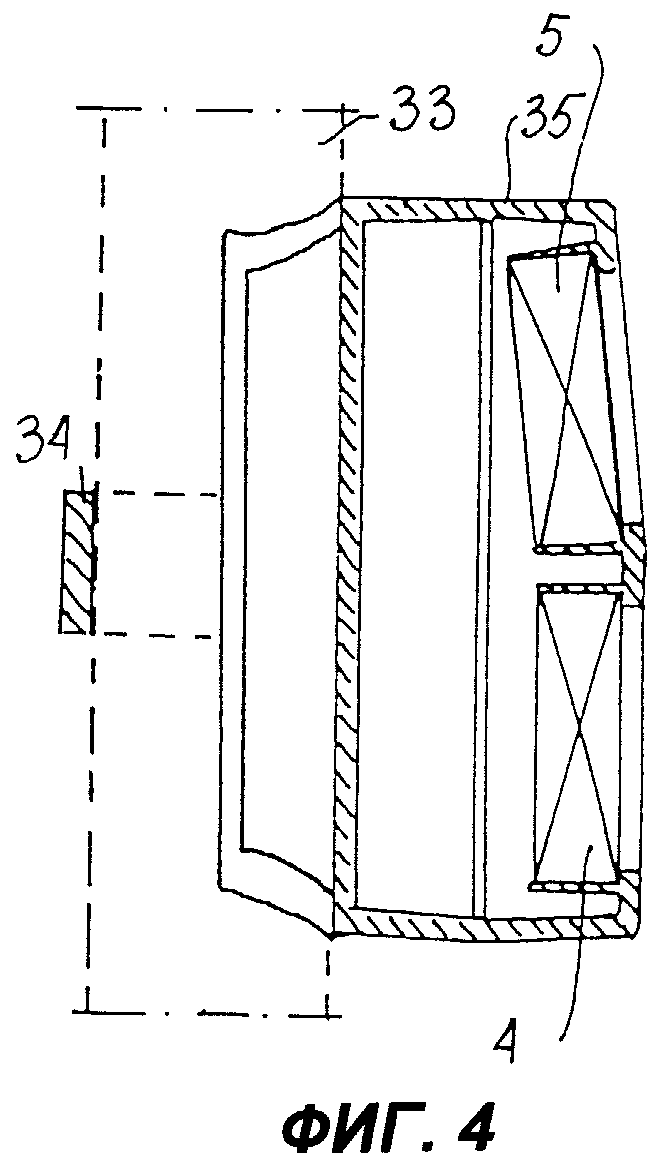
На фиг.3 представлен вариант выполнения в виде схемы управления движением. Оба локационных сигнала ЛС1, ЛС2 в пределах временного окна Т1, в течение которого ожидается более ранний отраженный сигнал, интегрируются в интеграторах 27, 28, и затем интегральные величины импульсно передаются в блокирующие схемы 29, 30 с тактом Т2.
Базовый сигнал, идущий от первой блокирующей схемы 29, разделяется в трехступенчатом делителе напряжения (потенциометре) R1, RT, R2, от среднего сопротивления RT которого отводятся относительные верхняя и нижняя пороговые величины ВПВ, НПВ, которые подаются на положительный или отрицательный вход одного из двух сравнивающих устройств 31, 32, при этом на другие их входы подается сигнал от второй блокирующей схемы 30.
Указанная схема соединения снабжена сеткой сопротивлений в виде суммирующей схемы R, R5, R6. На второй вход R6 схемы подводится поступающий от датчика 20 положения управляемых колес сигнал СУК угловой установки колес, который вместе с блокированным базовым сигналом от первой блокирующей схемы 29 вводится в качестве базового сигнала. При этом в сравнивающих устройствах 31, 32 локационный сигнал ЛС2, уменьшенный на величину сигнала СУК угловой установки колес и нормированный по первому локационному сигналу ЛС1, сравнивается с относительными пороговыми величинами ВПВ, НПВ. Если этот суммарный сигнал превысил верхнюю пороговую величину ВПВ, что означает слишком сильное направление локационного устройства на растительность, то от первого сравнивающего устройства 31 подается сигнал ЛГС управления на первый управляющий клапан 13. В случае перехода за нижний порог НПВ, то есть когда локационное устройство слишком сильно направлено на стерню, другое сравнивающее устройство 32 подает сигнал управления на другой управляющий клапан 14. Таким образом, угол установки колес подстраивается пропорционально локационному отклонению.
Устройство 23 высотной регулировки может быть выполнено в виде представленного на чертеже устройства прямолинейного смещения или в виде устройства регулирования угла поворота на конце стрелы 21.
Установочное соотношение между высотой и наклоном локационного устройства выбрано таким, что первый отраженный сигнал от лежащей выше зоны ЗО2 отражения приходит примерно в один и тот же промежуток времени независимо от установочного положения, а зона ЗО2* отражения от земли всегда отстоит от локационного устройства 3 по меньшей мере на расстояние АЕ, которое заметно больше наибольшего удаления более высокой зоны ЗО2 отражения, с тем, чтобы отраженный от земли сигнал был выделен по времени.
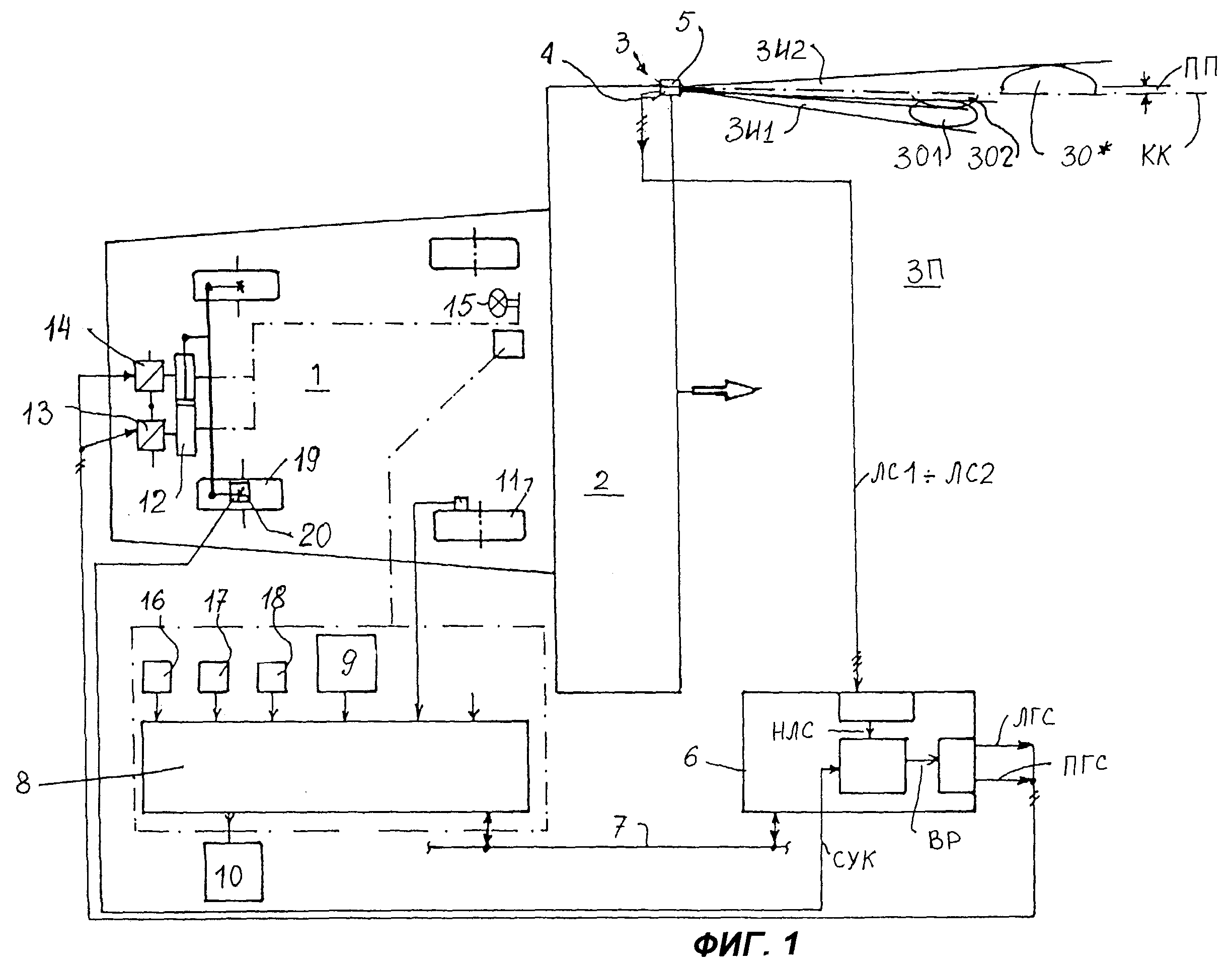
Фиг.4 изображает поперечный разрез локационного устройства 3, которое установлено на горизонтальной несущей трубе 33 с помощью хомута 34 с возможностью поворота. Два локатора 4, 5 установлены в корпусе 35 и несколько расходятся один относительно другого.
Реферат
Изобретение относится к локационному устройству для определения местоположения границы обработки, в частности кромки, убираемой сельскохозяйственной культуры. Технический результат заключается в равномерном управлении движением при переменных характеристиках отражения необработанного поля. Локационное устройство для определения местоположения границы обработки, локационный сигнал которого подается в качестве регулирующей величины на электрически управляемое устройство рулевого управления движением сельскохозяйственной машины с первым состоящим из передатчика и приемника локатором, зона отражения которого лежит в основном на еще не обработанном, в частности не убранном, поле, и со вторым, состоящим из другого передатчика и другого приемника, локатором, другие зоны отражения которого направлены на кромку обработки с обеих сторон с перекрытием. При этом зоны отражения частично перекрываются, оба передатчика управляются одновременно в импульсном режиме, а оба приемника в соответствии с этим воспринимают в суперпозиции идущие от обоих передатчиков и отраженные от необработанного поля приемные сигналы. 13 з.п. ф-лы, 4 ил.
Комментарии