Планирование заданий и траекторий с использованием изображений повреждений сельскохозяйственных культур от ветра - RU2722069C2
Код документа: RU2722069C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее описание относится к транспортным средствам сельскохозяйственного назначения. Более конкретно, настоящее описание относится к транспортным средствам сельскохозяйственного назначения, используемым в операциях сбора урожая.
Уровень техники
Одна проблема, с которой сталкиваются фермеры, которые возделывают множество сельскохозяйственных культур, например, кукурузу, пшеница, рис, ячмень или другие сельскохозяйственные культуры на корню, заключается в том, что эти сельскохозяйственные культуры могут сгибаться или повреждаться в результате шторма, возникающего в течение периода роста или сезона сбора урожая. Когда шторм возникает в течение периода роста, так что поврежденная сельскохозяйственная культура является пожинаемой, фермер может иметь один или более доступных развертываемых комбайнов. Кроме того, фермеры иногда должны справляться со сбором согнутых сельскохозяйственных культур перед другим предстоящим штормом.
Ежегодно, значительный объем сельскохозяйственной культуры подвергается повреждению вследствие штормов. Например, относительно большой процент акров кукурузы может ежегодно страдать от полегания или внезапного слома зеленых культур в различных географических регионах.
Вышеприведенное пояснение предоставлено просто в качестве общей исходной информации и не имеет намерение использования в качестве помощи при определении объема заявленного предмета изобретения.
Сущность изобретения
Система генератора маршрутов сбора урожая формирует маршрут сбора урожая для уборочной машины. Система генератора маршрутов сбора урожая имеет генератор маршрутов, который принимает информацию полеглых сельскохозяйственных культур из системы датчиков, указывающую характеристику полеглой сельскохозяйственной культуры в поле, и формирует маршрут сбора урожая через поле для уборочной машины, на основе информации полеглых сельскохозяйственных культур. Система генератора маршрутов сбора урожая также имеет компонент связи, который передает маршрут сбора урожая через поле в уборочную машину.
Данная сущность изобретения предоставлена для того, чтобы представлять в упрощенной форме выбор концепций, которые дополнительно описаны ниже в подробном описании. Эта сущность не предназначена для идентификации ключевых или важнейших признаков заявленного предмета изобретения, а также не предназначена для использования в качестве помощи при определении объема заявленного предмета изобретения. Заявленный предмет изобретения не ограничивается реализациями, которые разрешают все недостатки, отмеченные в разделе "Уровень техники".
Краткое описание чертежей
Фиг. 1 иллюстрирует примерное поле, которое пострадало от некоторого полегания сельскохозяйственных культур.
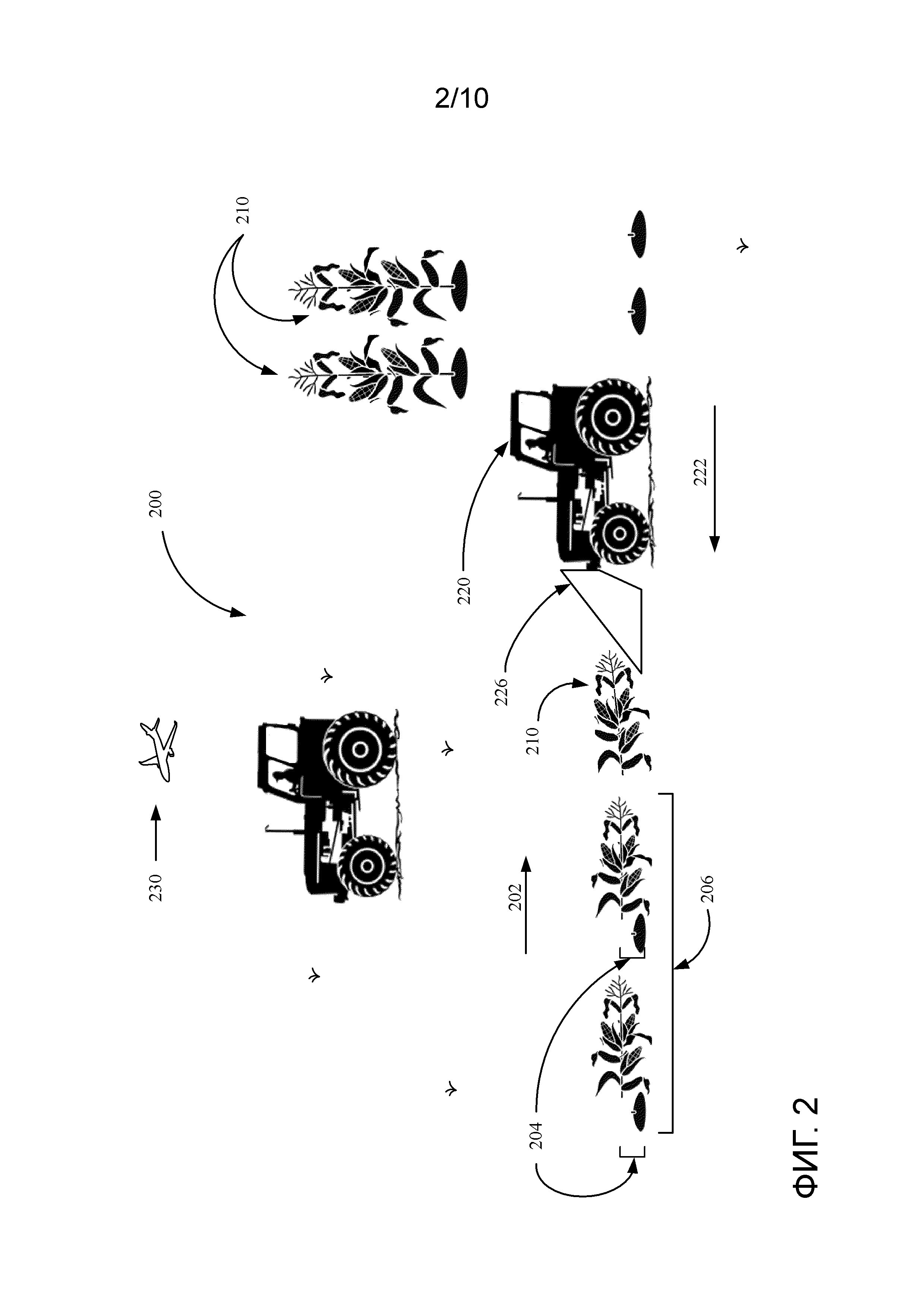
Фиг. 2 иллюстрирует примерные уборочные транспортные средства в поле, собирающие урожай полеглой сельскохозяйственной культуры.
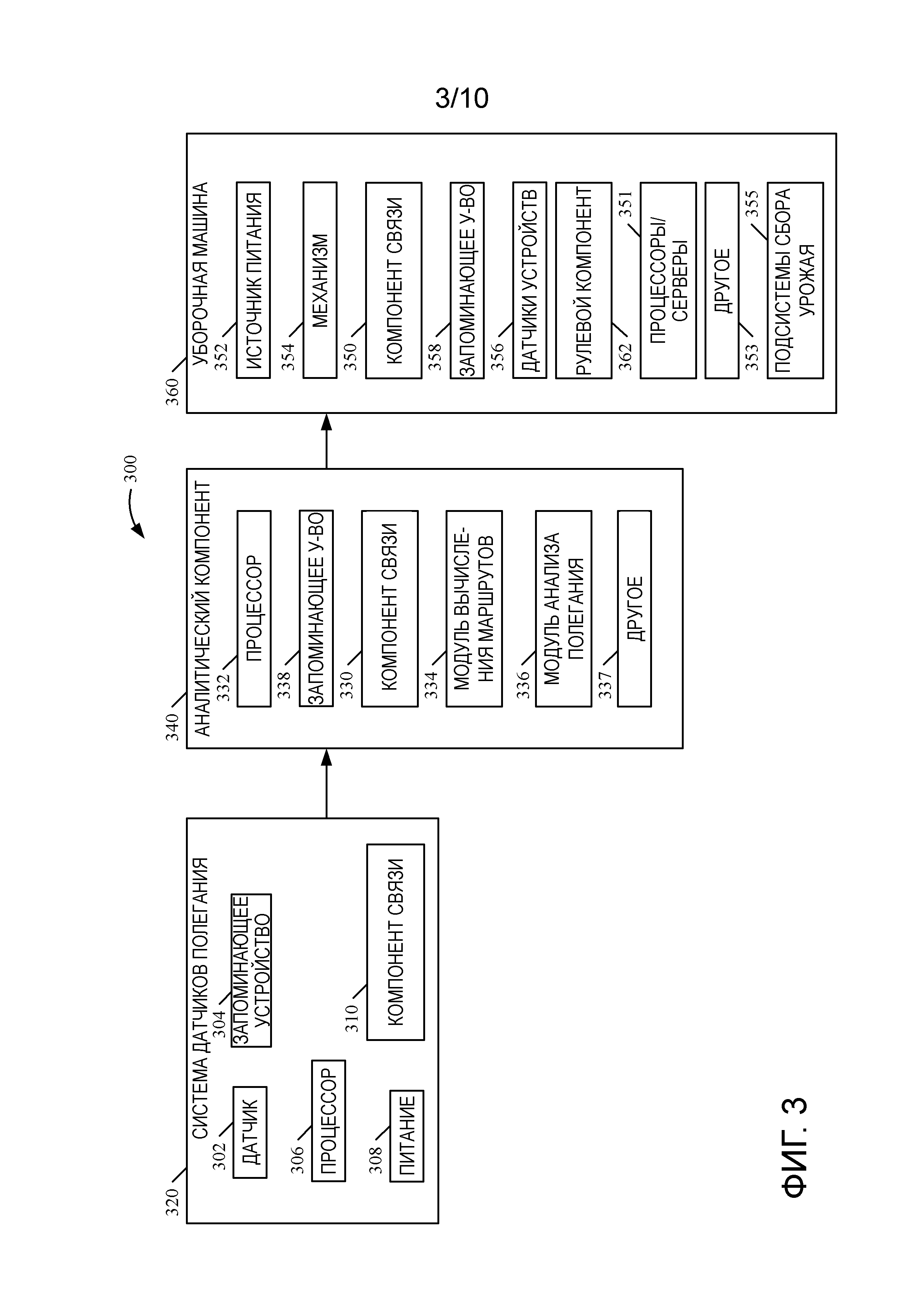
Фиг. 3 иллюстрирует упрощенную блок-схему примерной системы сбора урожая.
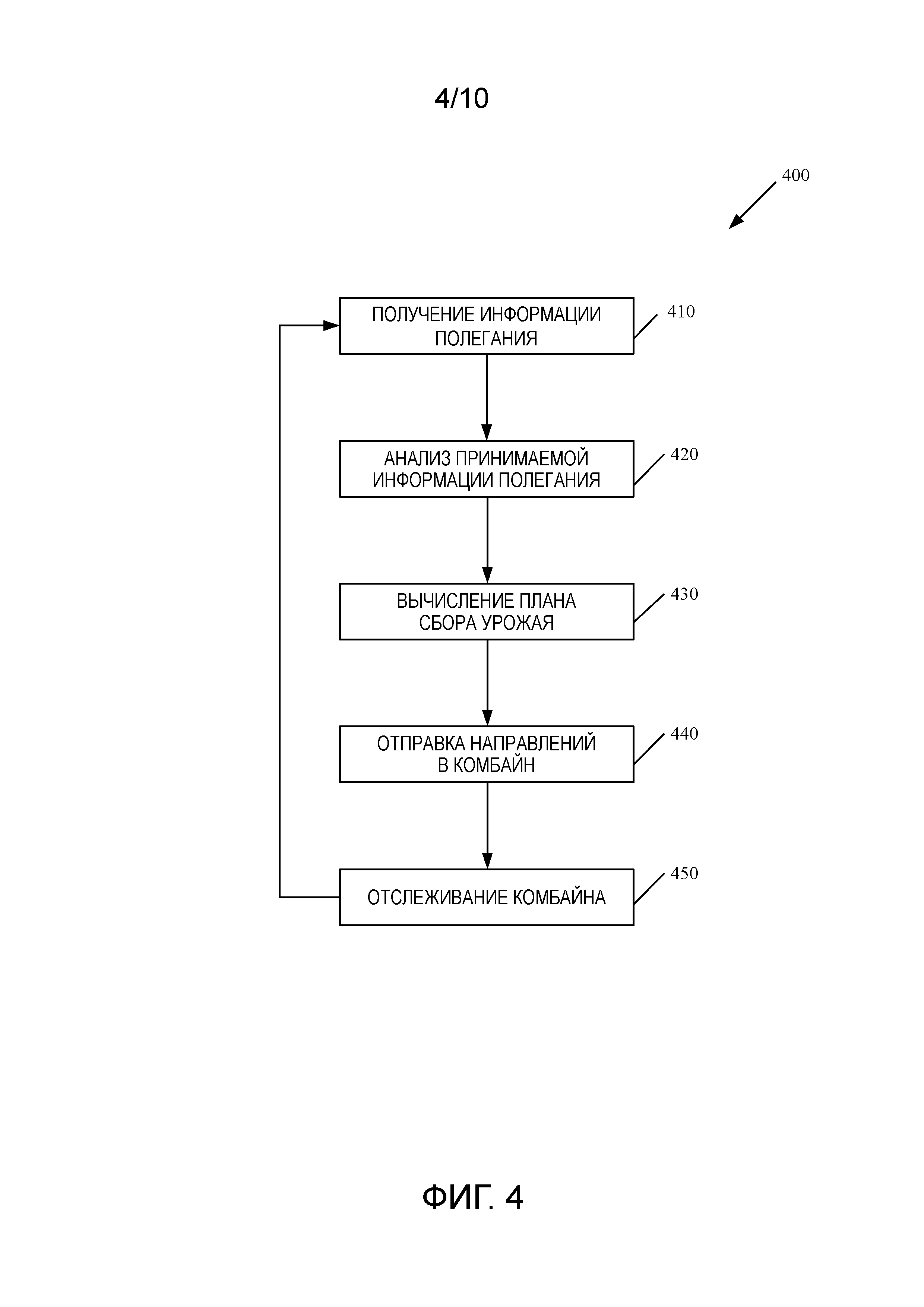
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей пример направления комбайна в поле.
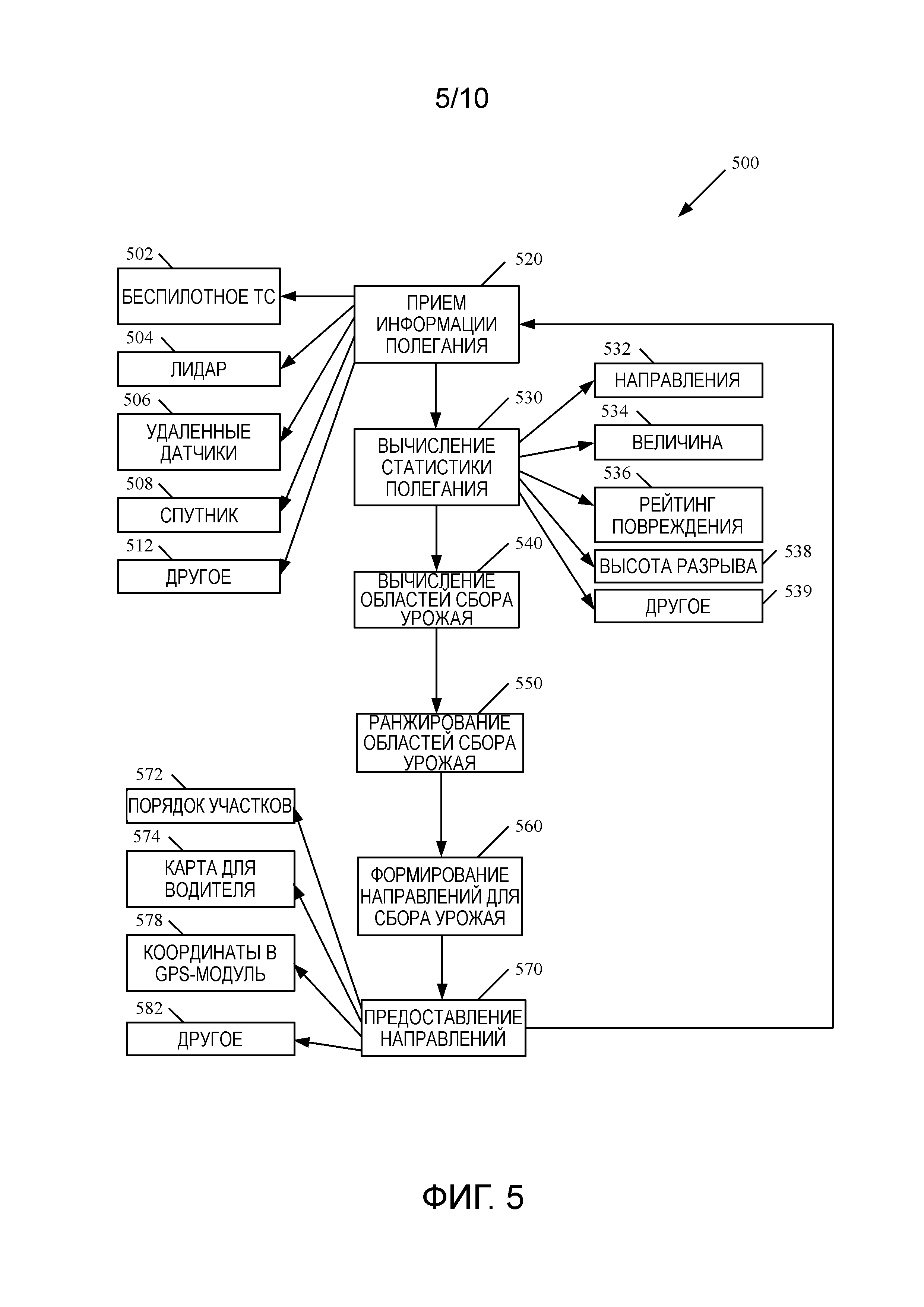
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей пример формирования плана сбора урожая.
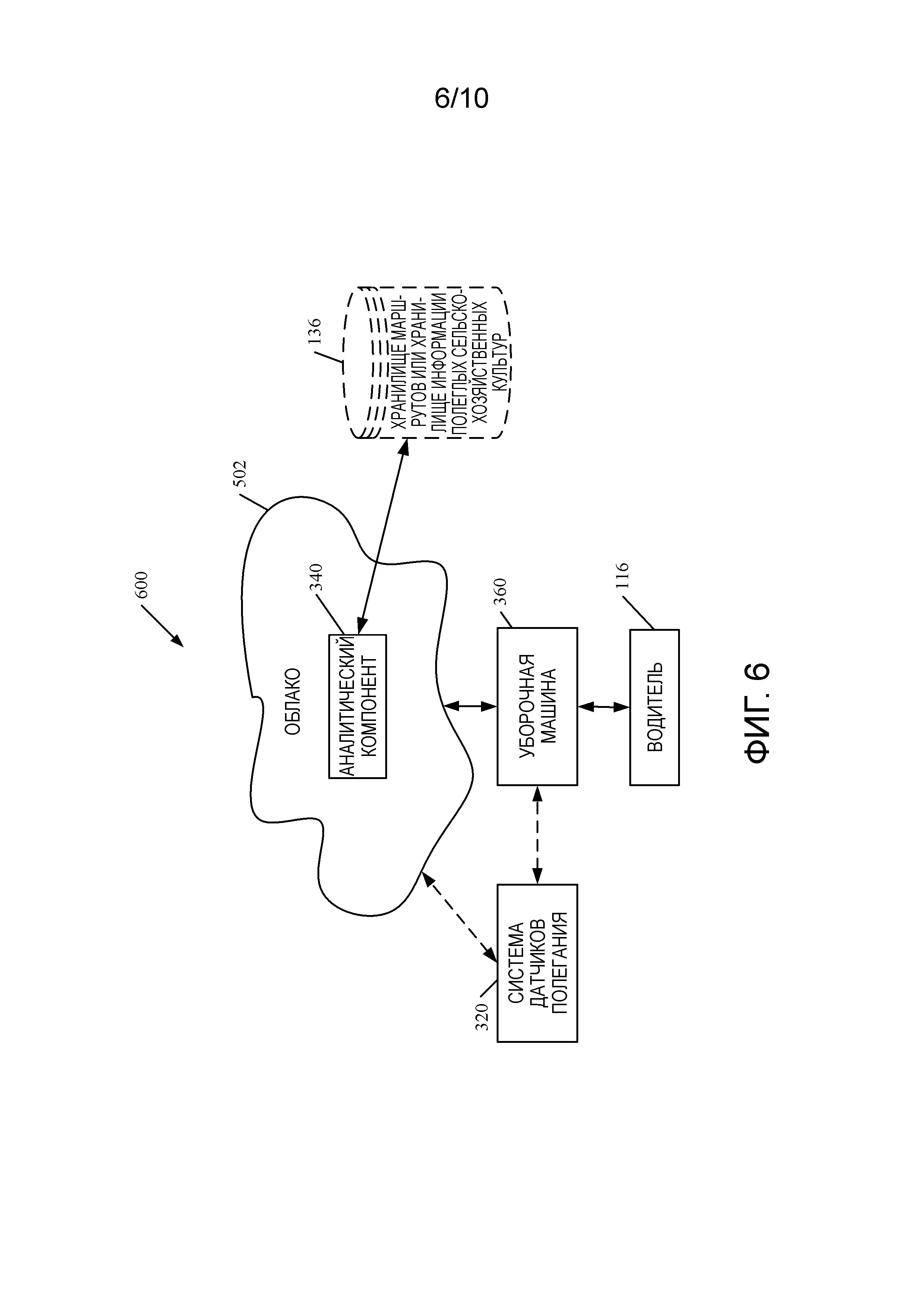
Фиг. 6 является блок-схемой одного примера удаленного серверного окружения.
Фиг. 7-9 показывают примеры мобильных устройств, которые могут использоваться в архитектурах, показанных на предыдущих чертежах.
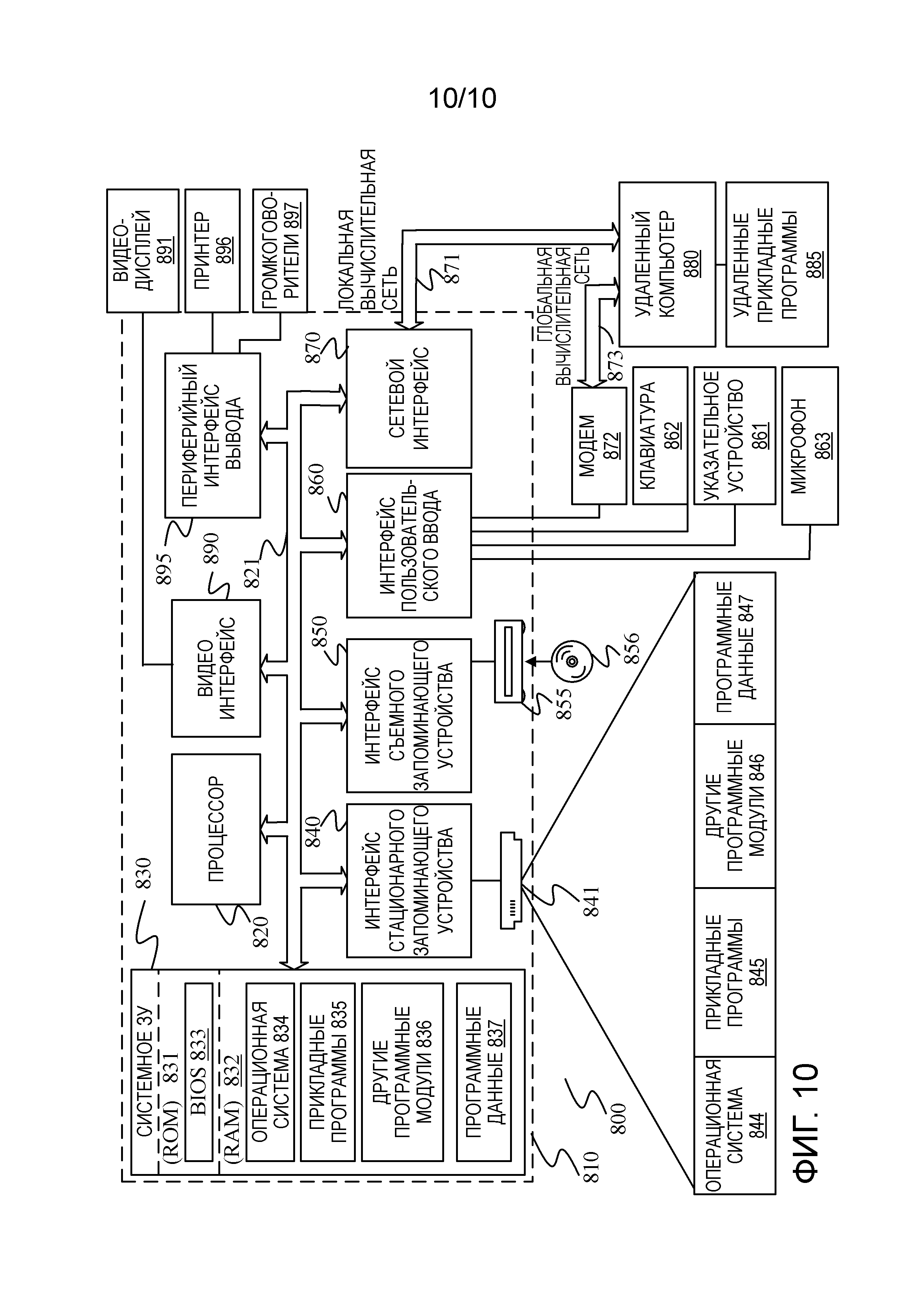
Фиг. 10 является блок-схемой одного примера вычислительного окружения, которое может развертываться в любой из архитектур, показанных на предыдущих чертежах.
Подробное описание изобретения
Сельскохозяйственные культуры могут быть повреждены погодными явлениями. Если сельскохозяйственная культура фатально повреждена в период невызревания, фермер может решать собирать урожай сельскохозяйственной культуры максимально возможно быстро, при этом оставляя несобранной ценную сельскохозяйственную культуру. Нефатально поврежденная сельскохозяйственная культура может подвергаться определенной степени восстановления между временем повреждения и временем сбора урожая. В качестве примера, полегание представляет собой такое повреждение растения, при котором растение прогибается или разрывается в точке вдоль стебля, либо при котором растение полностью вырывается с корнем из земли.
Полегание может быть распознаваемым на основе принимаемых сигналов датчиков. С воздуха, например, полеглые сельскохозяйственные культуры могут определяться на аэрофотоснимке в качестве сельскохозяйственных культур, которые лежат горизонтально или практически горизонтально вместо вертикально стоячего положения. Тем не менее, также могут использоваться другие примерные технологии считывания, такие как лидар или получение изображений через спутник.
Для фермеров возникает несколько проблем в отношении согнутых ветром сельскохозяйственных культур. Такие проблемы могут включать в себя определение эффективного способа обеспечивать маневрирование одного или более уборочных транспортных средств через поле, минимизацию затрат, ассоциированных с проблематичным сбором урожая, при одновременной максимизации прибыли и потенциальном завершении операции сбора урожая до того, как наступает второй шторм. Как описано в данном документе, одно потенциальное решение для комбайна или другого полевого устройства заключается в автоматическом вычислении маршрута сбора урожая на основе принимаемых сигналов датчиков, которые указывают то, в каких местах сельскохозяйственные культуры полегли, и то, в каких направлениях они лежат.
Фиг. 1 иллюстрирует примерное поле, которое пострадало от некоторого полегания сельскохозяйственных культур. Полегание сельскохозяйственных культур может возникать, например, в результате недавнего штормового ветра. Дополнительно, хотя как примеры и способы, описанные в данном документе, ссылаются на сбор полеглых сельскохозяйственных культур, специалисты в данной области техники должны понимать, что примеры и способы также являются применимыми для других операций сбора урожая.
Некоторые стебли сельскохозяйственной культуры 110 в поле 100 под сельскохозяйственной культурой пострадали от полегания вдоль направления 102. Тем не менее, различные стебли сельскохозяйственной культуры 110 могут иметь различные направления 102 полегания. Полеглые сельскохозяйственные культуры также могут иметь заданную высоту 104 разрыва для стеблей, которые сломаны в некоторый точке вдоль их длины. Тем не менее, по меньшей мере, некоторая сельскохозяйственная культура может быть полностью вырвана с корнем или может быть изогнута, но не разорвана. Знание направления 102 полегания может обеспечивать возможность улучшенного сбора урожая. Например, направление комбайна таким образом, чтобы приближаться к согнутым ветром сельскохозяйственным культурам в направлении, практически противоположном направлению 102, позволяет повышать собранный выход.
Тем не менее, важно отметить, что в поле 100 под сельскохозяйственной культурой по фиг. 1, не вся сельскохозяйственная культура 110 подвергнута полеганию. Может быть важным обеспечивать возможность для неповрежденной сельскохозяйственной культуры или сельскохозяйственной культуры, которая может восстанавливаться, оставаться в поле с тем, чтобы полностью вызревать до сбора урожая. В других примерах, урожай собирается со всего поля, но сбор урожая является более эффективным, если комбайн зацепляет сельскохозяйственную культуру в направлении, противоположном направлению 102 полегания. Следовательно, план сбора урожая, который используется в маневрировании уборочной машины через поле 100, может указывать направление движения для комбайна по мере того, как он перемещается через поле 100, собирая урожай полеглой сельскохозяйственной культуры.
Фиг. 2 иллюстрирует другое примерное поле 200 с некоторой полеглой сельскохозяйственной культурой 210, которая лежит в направлении 202 полегания. Как показано на фиг. 2, комбайн 220 приближается к участку полеглой сельскохозяйственной культуры 210 в направлении, практически противоположном направлению 202 полегания. Уборочный механизм 226, который может представлять собой насадку или другой надлежащий уборочный механизм, может устанавливаться таким образом, что он располагается на/ниже высоты 204 разрыва полеглой сельскохозяйственной культуры 210. Некоторая полеглая сельскохозяйственная культура может иметь другую высоту 204 разрыва, поскольку различные силы ветра или другие срезающие силы могут присутствовать при вызывающем повреждения событии через поле 200. В одном примере, комбайн 220 или механизм 226 может иметь некоторые датчики устройств, выполненные с возможностью предоставлять сигналы датчиков относительно высоты 204 разрыва, и контроллер может быть выполнен с возможностью повторно регулировать высоту механизма 226 соответствующим образом. Дополнительно, по мере того, как собирается урожай сельскохозяйственной культуры 210, механизм 226 или комбайн 220 может иметь некоторые датчики, выполненные с возможностью определять направление 202 полегания. Направление 222 движения комбайна после этого может прерывисто регулироваться таким образом, что оно остается практически противоположным направлению 202 полегания.
Величина, ассоциированная с полеглой сельскохозяйственной культурой, также может считываться на фиг. 2. Величина может указывать область поля 200 с полеглой сельскохозяйственной культурой, а также серьезность испытываемого полегания. В одном примере, величина (например, обнаруженная серьезность полегания сельскохозяйственных культур) может представлять собой важные факторы, формирующие план сбора урожая для поля 200.
Фиг. 2 также иллюстрирует множество комбайнов 220 в примерном поле 200. Тем не менее, способы и конфигурации, описанные в данном документе, могут осуществляться на практике только с одним комбайном или более чем с двумя комбайнами.
Помимо этого, фиг. 2 показывает примерное летательное устройство 230 захвата. Летательное устройство 230 захвата может быть выполнено с возможностью получать информацию до или в ходе операции сбора урожая. В одном примере, летательное устройство 230 захвата представляет собой беспилотный летательный аппарат (UAV). UAV 230 может отправляться до сбора урожая, чтобы захватывать информацию изображений с воздуха относительно поля 200 под сельскохозяйственной культурой. UAV может быть выполнен с возможностью захватывать изображения, видео или другую сенсорную информацию относительно поля 200. Дополнительно, UAV 230 может быть выполнен с возможностью проводить дополнительные обзорные съемки поля 200 в ходе операции сбора урожая. Тем не менее, хотя как UAV проиллюстрирован в качестве одного типа устройства, которое переносит датчик, другие устройства или датчики также могут быть выполнены с возможностью захватывать информацию относительно полегания сельскохозяйственных культур, например, через лидарные датчики, пилотируемый самолет, воздушные шары, получение изображений через спутник и т.д.
Фиг. 3 иллюстрирует упрощенную блок-схему примерной архитектуры 300 системы сбора урожая. Архитектура 300 может содержать одну или более систем 320 датчиков полегания, аналитические компоненты 340 и уборочные машины 360. Дополнительно, хотя показаны как три отдельных компонента, системы 320 датчиков полегания, аналитические компоненты 340 и уборочные машины 360 могут комбинироваться или подразделяться множеством способов. Например, система 320 датчиков полегания и аналитический компонент 340 могут представлять собой компоненты в UAV 230. Эта конфигурация может позволять UAV 230, например, собирать и анализировать информацию, полученную посредством системы 320 датчиков полегания, так что направления сбора урожая отправляются в уборочную машину 360. В другом примере, аналитический компонент 340 является частью уборочной машины 360. Эта конфигурация может позволять аналитическому компоненту 340 обрабатывать необработанные сигналы датчиков, принимаемые из системы 320 датчиков полегания, так что анализ осуществляется в уборочной машине 360. В другом примере, по меньшей мере, одна система 320 датчиков полегания расположена рядом с уборочной машиной 360 (например, датчик 104 высоты разрыва на уборочном механизме 226), а другие расположены в другом месте.
Тем не менее, в сценарии, в котором множество уборочных машин 360 работают согласованно для того, чтобы собирать урожай с поля, аналитический компонент 340 также может представлять собой модуль, отдельный от системы 320 датчиков полегания или от уборочной машины 360. Например, аналитический компонент 340 может быть частью мобильного вычислительного устройства, используемого одним или более водителей уборочных машин 360. В другом примере, аналитический компонент 340 может представлять собой мобильное вычислительное устройство под управлением человека, который направляет, но не управляет напрямую, любой из уборочных машин 360.
Далее подробнее поясняется каждое из системы 320 датчиков полегания, аналитического компонента 340 и уборочной машины 360. Сначала поясняется система 320 датчиков полегания.
В одном примере, система 320 датчиков полегания включает в себя один или более отдельных датчиков 302 или матрицы датчиков, выполненные с возможностью принимать информацию полегания относительно поля. Например, датчик 302 может представлять собой камеру, стереокамеру, лидар или другой компонент формирования изображений, прикрепленный со стороны системы 320 датчиков полегания. Система 320 датчиков полегания также может иметь источник 308 питания. В примере, в котором система 320 датчиков полегания развертывается на UAV, источник 304 питания может представлять собой либо аккумуляторный источник питания, либо топливный источник питания. UAV также может быть привязан к другой машине и принимать мощность приема через привязной трос. Система 320 датчиков полегания может иметь компонент 306 обработки, выполненный с возможностью обрабатывать команды, принимаемые из компонента 310 связи. Компонент 306 обработки также может быть выполнен с возможностью направлять и обрабатывать сигналы, принимаемые из датчика 302. В одном примере, система 320 датчиков полегания также имеет компонент 304 запоминающего устройства, выполненный с возможностью сохранять принимаемую информацию датчиков из датчиков 302. Компонент 304 запоминающего устройства также может сохранять команды, принимаемые из компонента 310 связи.
В примере, в котором система 320 датчиков полегания развертывается на UAV, она может иметь датчики 302, смонтированные на/рядом с UAV. Процессор 306, на основе информации из датчиков 302, может формировать карту полегания в поле, например, векторную карту, показывающую данные величины и ориентации полегания для каждого элемента, определенного в растровом представлении карты полегания в поле. Величина может ранжироваться, например, от 0° для сельскохозяйственной культуры, по-прежнему стоящей прямо, до 90° для сельскохозяйственной культуры, которая является полностью ровной. Ориентация может соответствовать направлению по компасу, в котором лежит сельскохозяйственная культура, и может содержать любое значение от 0° до 360°. Могут быть предусмотрены дополнительные данные, принимаемые из датчиков 302, например, низкий прогиб стебля, используемый для того, чтобы отличать между резким внезапным сломом зеленых культур, смещением корней во влажной почве или изгибом в стебле с минимальным смещением в корнях. Эта информация может быть полезной при определении того, должны или нет некоторые области сбора урожая отмечаться на карте полегания в поле как "не для сбора", поскольку зеленая сельскохозяйственная культура может восстанавливаться самостоятельно, а не отмирать преждевременно. Формированная карта полегания может передаваться, через компонент 310 связи, в аналитический компонент 340, уборочную машину 360 или ее водителю. Если сельскохозяйственная культура является зрелой, обозначение "не для сбора" может назначаться серьезно полеглой сельскохозяйственной культуре, вследствие времени, затрат или других ресурсов, требуемых для того, чтобы собирать урожай сельскохозяйственной культуры, относительно рисков и возможностей сбора урожая сначала других областей.
В одном примере, в котором система 320 датчиков полегания развертывается на UAV, и датчик 302 представляет собой камеру, данные изображений с воздуха, принимаемые из системы 320 датчиков полегания, могут анализироваться на предмет текстуры или другого индикатора сельскохозяйственной культуры, лежащей в данном направлении. Величина может логически выводиться из длин сегментов изображений, соответствующих растениям при просмотре сверху. Чем длиннее сегмент изображения, тем большим является полегание.
В другом примере, в котором система 320 датчиков полегания развертывается на транспортном средстве с наземными датчиками, трехмерные изображения, принимаемые, например, из стереокамеры 302 или лидарной системы 302, аналогично могут анализироваться для того, чтобы предоставлять информацию ориентации для полеглых сельскохозяйственных культур. Эти наземные датчики 302 могут использоваться в более высоких областях параллельно с полем 200, и измеренные величины могут быть основаны на измеренной верхушке растительного покрова относительно земли. Недавно полученный набор данных для неполеглой сельскохозяйственной культуры, например, извлеченных до шторма, относительно неполеглой доминирующей высоты насаждения верхушки покрова до земли, также может использоваться, в качестве опорного набора для того, чтобы определять величину полегания в поле.
В одном примере, система 320 датчиков полегания может располагаться на транспортном средстве, которое удаленно управляться, либо она может следовать по предварительно запрограммированной траектории. Система управления, которая управляет подвижными системами 320 транспортного средства, может быть частью аналитического компонента 340, уборочной машины 360 или другого вычислительного устройства. Например, она может представлять собой удаленный контроллер или мобильное устройство, такой как смартфон, планшетный или переносной компьютер. Система 320 датчиков полегания может удаленно управляться таким образом, что информация датчиков отправляется посредством компонента 310 связи в аналитический компонент 340 и/или уборочную машину 360, и/или другой удаленный модуль хранения.
Далее подробнее поясняются примеры аналитического компонента 340. В одном примере, аналитический компонент 340 содержит процессор 332, модуль 334 вычисления маршрутов, модуль 336 анализа полегания, компонент 338 запоминающего устройства и компонент 330 связи. Он также может включать в себя другие элементы 337. Аналитический компонент 340, через компонент 330 связи, может обмениваться данными с системой 320 датчиков полегания и/или уборочной машиной 360. Процессор 332 может быть выполнен с возможностью обрабатывать информацию из системы 320 датчиков полегания и команды из уборочной машины 360 и направлять принимаемые сигналы датчиков и принимаемые команды в модуль 336 анализа полегания и/или модуль 334 вычисления маршрутов. Аналитический компонент 340 также может содержать источник питания (не показан). Тем не менее, аналитический компонент 340 может питаться посредством источника 308 питания системы 320 датчиков полегания или источника 352 питания уборочной машины 360.
Модуль 336 анализа полегания может быть выполнен с возможностью анализировать сигналы, принимаемые из датчиков 302, и определять характеристики относительно сельскохозяйственной культуры 210 в поле 200. Модуль 336 анализа полегания может вычислять направление полегания для полеглой сельскохозяйственной культуры и, например, может формировать векторную карту, выражающую направление полегания и высоту разрыва полеглой сельскохозяйственной культуры.
Модуль 334 вычисления маршрутов может быть выполнен с возможностью принимать анализ полегания из модуля 336 анализа полегания и вычислять план сбора урожая. План сбора урожая может содержать карту участков поля 200, некоторые из которых могут быть классифицированы как пожинаемые, вместе с порядком участков сбора урожая и направлением 222 сбора урожая для каждого участка. План сбора урожая также может содержать направления для одной или более уборочных машин 360. Модуль 334 вычисления маршрутов может учитывать множество входных данных при упорядочении участков поля для сбора урожая, например, затраты в расчете на акр для сбора урожая и/или время, требуемое на сбор урожая. Модуль 334 вычисления маршрутов также может вычислять маршрут на основе сигналов из датчиков 302.
Далее подробнее поясняются примеры уборочной машины 360. Уборочная машина 360 может представлять собой любую машину, которая выполнена с возможностью собирать урожай сельскохозяйственной культуры. Она может включать в себя, например, зерноуборочный комбайн, силосоуборочный комбайн, комбайн для уборки сахарного тростника или любое другое надлежащее уборочное транспортное средство.
Уборочная машина 360 может включать в себя источник 352 питания, рулевой компонент 362, уборочный механизм 354, а также встроенное вычислительное устройство (к примеру, процессоры или серверы 351) с запоминающим устройством 358 и компонентом 350 связи. Она также может включать в себя датчики 356 устройств и другие элементы 353. Уборочный механизм 354 может представлять собой насадку на комбайне, высеивающие секции или другой соответствующий механизм. Датчики 356 устройств могут быть расположены в и/или рядом с уборочной машиной 360. Датчики 356 устройств, например, могут предоставлять водителю информацию относительно оставшегося топлива, высоты механизма 354 и/или информацию полегания собранной сельскохозяйственной культуры и т.д.
Источник 352 питания может содержать топливный двигатель с использованием, например, углеводородного или другого источника топлива. Источник 352 питания также может представлять собой аккумулятор или другой надлежащий источник питания.
Компонент 350 связи может быть выполнен с возможностью обмениваться данными с одним или с обоими из аналитического компонента 340 и системы 320 датчиков полегания, через соответствующие компоненты 330 и 310 связи, соответственно. Компонент 350 связи также может быть выполнен с возможностью обеспечивать возможность связи между уборочными машинами 360 или между водителями множества уборочных машин 360. Любые из компонентов 310, 330 и 350 связи могут быть выполнены с возможностью беспроводной связи, например, содержащей связь на основе Интернет-технологий, сотовую связь, сигналы радиосвязи, связь в поле в ближней зоне или любой другой надлежащий сигнал связи.
Запоминающее устройство 358 может быть выполнено с возможностью принимать и сохранять направления для текущего маршрута сбора урожая. Серверы и процессоры 351 могут реализовывать систему управления, которая выполнена с возможностью управлять двигательными и рулевыми компонентами 362, а также компонентами машины 360. Датчики 356 также могут содержать датчик позиции, такой как модуль GPS (глобальной системы позиционирования), выполненный с возможностью считывать текущую позицию машины 360.
Уборочная машина 360 также может включать в себя рулевые компоненты 362. Рулевой компонент 362, в одном примере, может быть выполнен с возможностью осуществляемого водителем управления уборочной машиной 360. Тем не менее, уборочная машина 360 также может быть выполнена с возможностью частично автоматизированного или полностью автоматизированного управления. Автоматизированное управление может выполняться, например, посредством приема маршрута сбора урожая из модуля 334 вычисления маршрутов и затем инструктирования рулевому компоненту 362 обеспечивать автоматическое маневрирование машины 360 вдоль указываемого маршрута, с использованием информации позиции из датчика позиции (например, приемного GPS-устройства). Автоматизированное управление также может реализовываться с использованием других элементов.
Уборочная машина 360 также может включать в себя другие подсистемы 355 сбора урожая. Подсистемы 355 сбора урожая могут содержать, например, любую из системы обмолота, системы отделения, системы очистки, системы обработки остатков, двигательной системы, систем оконечного оборудования, системы насадок и/или систем погрузки-разгрузки материалов. Подсистема обмолота может включать в себя подбарабанье и ротор. Подсистема отделения может включать в себя ротор. Подсистема очистки может включать в себя вентилятор, решето и сито. Подсистема обработки остатков может включать в себя измельчитель и рассеиватель. Двигательная подсистема может включать в себя колеса и/или гусеницы. Подсистема оконечного оборудования может включать в себя насадку с измельчающе-высеивающими секциями. Подсистема погрузки-разгрузки материалов может включать в себя камеру подавателя комбайна, ускоритель подачи, выгрузной молотильный барабан, колосовой элеватор, элеватор для очищенного зерна и разгрузочный шнек. Тем не менее, также могут использоваться другие подходящие конструкции подсистем. Дополнительно, уборочная машина 360 также может включать в себя другие системы 353.
Датчики 356 устройств могут быть расположены на/рядом с уборочной машиной 360. Например, один датчик 356 устройства может быть расположен на уборочном механизме 354 и выполнен с возможностью отслеживать высоту механизма относительно определенной высоты собираемой полеглой сельскохозяйственной культуры. Как упомянуто выше, датчики 356 устройств могут включать в себя внутренний GPS-модуль или другой датчик мониторинга местоположения, выполненный с возможностью отслеживать позицию уборочной машины 360.
Запоминающее устройство 358 также может сохранять информацию, принимаемую из любых из датчиков 356 устройств. Например, датчики 356 устройств могут прерывисто предоставлять сигналы датчиков в уборочную машину 360. Уборочная машина 360 затем может автоматически обновлять маршрут сбора урожая. Тем не менее, если множество уборочных машин 360 работают совместно, обновленные сигналы из датчиков 356 могут сначала маршрутизироваться через общий аналитический компонент 340, так что все маршруты сбора урожая обновляются согласованно в ответ на сигналы из датчиков 356 устройств. Альтернативно, один аналитический компонент 340 может быть расположен на машине 360 и использоваться для того, чтобы совместно управлять машинами. Альтернативно, каждая машина 360 может иметь аналитический компонент 340, которые обмениваются данными друг с другом. Машины 360 также могут работать независимо друг от друга.
Далее подробнее поясняется система 320 датчиков полегания. Хотя не показано на фиг. 3, информация полегания, принимаемая из системы 320 датчиков полегания, может быть представлена водителю уборочной машины 360 или оператору аналитического компонента 340. Информация полегания может быть представлена в качестве получения изображений или прямой видеотрансляции, принимаемой из датчиков 302, векторной карты, измеряющей направленность 202 и высоту 204 разрыва полеглой сельскохозяйственной культуры, например, либо другими способами.
Система 320 датчиков полегания может быть выполнена с возможностью получать данные относительно величины и направления полегания в поле. Данные полегания могут собираться посредством наземного датчика 302, например, расположенного на/над уровнем земли. Система 320 датчиков полегания также может использовать датчик в виде двухмерной или трехмерной камеры, стереокамеру или лидар, чтобы предоставлять данные на основе геобазирования. Геобазирование может выполняться в реальном времени через геопозиционный датчик. Тем не менее, система 320 датчиков полегания также или альтернативно может собирать информацию через летающую платформу, к примеру, через UAV или спутниковый датчик 302. Использование UAV может предоставлять данные полегания высокого разрешения. Данные могут собираться из множества датчиков 302, в любое подходящее время, например, в секунды, минуты, часы или дни, до сбора урожая с поля.
Система 320 датчиков полегания может работать совместно с датчиками 356 устройств для того, чтобы формировать и обновлять понимание условий по времени сбора урожая. Датчики 356 устройств могут предоставлять дополнительные данные состояния поля или сельскохозяйственных культур, которые могут обеспечивать возможность лучшего управления уборочными машинами 360. Например, может быть важным обновлять данные полегания в ходе сбора урожая, поскольку некоторая сельскохозяйственная культура может возвращаться в исходное положение или подвергаться дополнительному полеганию с момента, когда система 320 датчиков полегания первоначально собирает данные. Дополнительно, датчики 356 устройств могут быть полезными при обновлении высоты уборочного механизма 354. Дополнительно, датчики 356 устройств также могут быть выполнены с возможностью измерять то, как уборочный механизм 354 зацепляет сельскохозяйственную культуру. Другие датчики 356 устройств могут содержать датчик массы, датчик выхода зерна, датчик потерь зерна или любой другой подходящий датчик, чтобы определять фактические выходы по урожаю. Эта информация может быть важной, поскольку модуль 334 вычисления маршрутов, в одном примере, может вычислять маршрут на основе ожидаемого выхода по урожаю. Если считываемый выход значительно превышает или значительно меньше выхода, прогнозированного посредством модуля 334 вычисления маршрутов, может быть важным повторно привлекать летательную систему 320 датчиков полегания, с тем чтобы получать более точную и актуальную информацию либо иным образом обновлять план сбора урожая.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей пример операции архитектуры 300 в направлении комбайна в поле. Хотя последовательность 400 операций описывается в данном документе относительно направления одного комбайна, она может быть использована для того, чтобы формировать направления для множества комбайнов в поле.
На этапе 410, система 320 датчиков полегания собирает информацию полегания для данного поля 200. В одном примере, информация полегания может получаться из летательного датчика 302, например, развернутого на UAV 230. Датчики 354 устройств также могут собирать информацию полегания по мере того, как уборочная машина 360 зацепляет сельскохозяйственную культуру в поле 200.
На этапе 420, аналитический компонент 340 анализирует принимаемую информацию полегания. Модуль 336 анализа полегания может формировать одно или более значений, указывающих характеристики полеглой сельскохозяйственной культуры, например, направление 202 полегания, величину 206, высоту 204 разрыва и/или оцененное повреждение поля 200. Вся информация также может быть коррелирована с географической позицией.
На этапе 430, модуль 334 вычисления маршрутов, на основе анализа полегания, формирует план сбора урожая для одного или более комбайнов. Модуль 334 вычисления маршрутов может учитывать множество факторов при формировании плана сбора урожая. Например, он по-прежнему может учитывать прогнозный выход на основе оцененного созревания сельскохозяйственной культуры 210. Модуль 334 вычисления маршрутов также может учитывать такие факторы, как оцененное время в расчете на акр для сбора урожая, оцененная прибыль в расчете на акр, оцененные затраты в расчете на акр для сбора урожая, оцененная мощность или расход топлива при сборе урожая и т.д. Дополнительно, план сбора урожая может базироваться, по меньшей мере, частично на анализе с группировкой полеглых сельскохозяйственных культур на основе информации датчиков. Ниже подробнее описываются некоторые правила группировки.
На этапе 440, компонент 330 связи отправляет направления в уборочную машину(ы) 360. Эти направления могут иметь форму координат для заданных областей поля и порядок сбора урожая для областей поля. Направления также могут включать в себя маршрутную карту, показывающую то, как добираться до этих областей, и направление 222 сбора урожая для каждой области поля. Следует понимать, что уборочная машина может не приспосабливать непосредственный подход при сборе урожая с поля, поскольку не вся сельскохозяйственная культура 210 в поле 200 может быть собрана при операции сбора урожая. Вместо этого, уборочная машина 360 может направляться с возможностью маневрировать в направлении, противоположном направлению 202 полегания, невзирая на то, каким может быть направление, независимо от первоначального направления выращенной грядки. Это может приводить к движению уборочной машины 360, например, по диагонали через поле 200 (относительно грядок сельскохозяйственной культуры) в ходе операции сбора урожая. Дополнительно, уборочная машина может направляться таким образом, чтобы не собирать урожай некоторых областей поля, например, поскольку повреждение является таким, что больше не имеет смысла собирать зеленую сельскохозяйственную культуру в этих областях, либо таким, что сельскохозяйственная культура является относительно нетронутой и должна оставляться до полного вызревания.
На этапе 450, аналитический компонент 340 отслеживает уборочную машину 360 по мере того, как она собирает урожай с указанных областей поля. Мониторинг может содержать прием сигналов из датчиков 356 устройств. Сигналы датчиков могут предоставлять новую информацию, которая противоречит или дополняет информацию, первоначально используемую посредством модуля 334 вычисления маршрутов. Последовательность 400 операций после этого может возвращаться к этапу 410 с новой информацией. Дополнительно, мониторинг может содержать, по меньшей мере, частичную автоматизацию процесса маневрирования уборочной машины 360 через поле 200. Она может содержать, по меньшей мере, некоторое автоматическое управление рулевым компонентом 362, механизмом 354 и т.д.
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей примерную последовательность 500 операций для формирования плана сбора урожая. План сбора урожая может содержать направления для одной уборочной машины 360 или для множества уборочных машин 360.
На этапе 520, аналитический компонент 340 принимает информацию полегания. Информация полегания может приниматься из датчиков 302 системы 320 датчиков полегания. Дополнительно, информация полегания может приниматься из датчиков 356 устройств, например, в ходе операции сбора урожая. Информация полегания может приниматься от любого из множества источников, включающих в себя, но не только, беспилотный летательный аппарат 502, лидарную систему 504, развернутую на транспортном средстве, удаленные датчики 506, спутник 508 или другой источник 512 информации. Она также может включать в себя обновленную информацию, предоставленную из датчиков 356 устройств.
На этапе 530, модуль 336 анализа полегания формирует одно или более значений, связанных с принимаемой информацией полегания для поля 200. Значения могут указывать (или относиться) степень повреждения сельскохозяйственной культуры 210 в поле 200, направление 532 полегания, величину 534 полегания или рейтинг 536 повреждения. Модуль 336 анализа полегания также может идентифицировать высоту 538 разрыва полеглой сельскохозяйственной культуры, например, посредством рассмотрения известной оцененной высоты сельскохозяйственной культуры до повреждения и вычитания определенной длины упавшего стебля. Если длина падения сельскохозяйственной культуры, например, составляет на один фут меньше прогнозной высоты в стоячем положении сельскохозяйственной культуры, может быть оценено, что высота разрыва составляет приблизительно один фут. Высота 538 разрыва может использоваться при формировании направлений либо при рассмотрении высоты уборочного механизма 354. Модуль 336 анализа также может идентифицировать другую информацию 539.
В одном примере, вычисленная или необработанная информация полегания может быть проиллюстрирована на карте полегания, которая может быть представлена водителю уборочной машины 360, так что указываются различные определенные степени полегания или другие определенные степени повреждения. Индикатор может выделяться цветовым кодированием, яркостью и т.д.
На этапе 540, модуль 334 вычисления маршрутов вычисляет последовательность областей сбора урожая для поля 200. Области сбора урожая могут определяться посредством применения одного или более правил группировки к значениям полегания для поля 200, чтобы определять пожинаемые области поля. Одно правило группировки, например, сравнивает вычисленную статистику полегания с известной шириной уборочного механизма 354, так что области сбора урожая равны или меньше ширины уборочной головки. Другое правило группировки может определять область сбора урожая на основе существующей ориентации грядки выращенного урожая. В одном примере, в котором сельскохозяйственная культура по-прежнему является зеленой, урожай с поврежденных грядок собирается, а неповрежденные грядки являются нетронутыми. В другом примере, в котором сельскохозяйственная культура является зрелой, серьезно поврежденные грядки являются нетронутыми, в то время как со всех других грядок собирается урожай. Другое правило группировки, для небольшого зерна, например, может вычислять области сбора урожая исключительно на основе направления 202 полегания. Другое правило группировки может группировать области с аналогичной величиной полегания и направлением 202 полегания. Другое правило группировки может вычислять области сбора урожая таким образом, что они не перекрываются, например, чтобы предотвращать случайное столкновение между множеством уборочных машин 360, работающих в поле 200.
Модуль 334 вычисления маршрутов также может применять правила группировки относительно других факторов, таких как, например, проход комбайна, число собранных бушелей/акров, количество часов на сбор урожая в расчете на акр, ожидаемый доход в расчете на акр или любой другой подходящий фактор. Некоторые области поля могут быть классифицированы, на основе применяемых правил группировки, в качестве областей без сбора урожая или областей, которые должны быть классифицированы как задержанные вследствие времени, требуемого на сбор урожая, низкого ожидаемого выхода, неповрежденной сельскохозяйственной культуры или другой причины. Правила группировки, указывающие область поля как пожинаемую, непожинаемую или как область задержанного сбора урожая, могут быть основаны на пороговых значениях, таких как оценки минимального сбора урожая в бушелях в расчете на акр, максимальное количество часов в расчете на акр, минимальный чистый доход в час или другие подходящие значения для определения того, в каких областях поля должен быть собран урожай. Дополнительно, область поля, в дополнение к включению заданного пространства, может задаваться, например, посредством направления 222 сбора урожая.
На этапе 550, модуль 334 вычисления маршрутов ранжирует области поля, например, на основе правил группировки. Области поля могут ранжироваться на основе различных интересующих критериев, таких как ожидаемый доход, оцененное время сбора урожая, оцененные затраты на оплату труда и машинное оборудование при сборе урожая, оцененное топливо или потребление мощности, оцененный выход, собираемый в час, или любые другие критерии, важные для конкретного оператора. Дополнительно, области сбора урожая могут ранжироваться на основе текущих и расчетных погодных условий. Например, хотя конкретная область поля может иметь высокий предполагаемый выход, если урожай с нее не может быть собран до предстоящего шторма, она может понижаться в ранжировании по сравнению с другими областями, которые могут быть пожинаемыми согласно временным ограничениям. Тем не менее, если предполагаемый шторм задерживается или изменяет направление, область поля может ранжироваться выше. По мере того, как новая информация принимается посредством аналитического компонента 340, модуль 334 вычисления маршрутов может повторно ранжировать области поля и обновлять направления для одной или более уборочных машин 360 соответствующим образом.
Некоторые факторы могут быть конкретными для типа сельскохозяйственной культуры. Например, зерно может быть непожинаемым, если сбор урожая задерживается. В таком случае, скорости сбора урожая могут быть более высокими впоследствии в случае сельскохозяйственной культуры, которая может подвергаться некоторому движению возврата в исходное положение после события полегания. Дополнительно, для сельскохозяйственных культур, которые практически не повреждены посредством нахождения в поле при полегании во времени, скорости сбора урожая могут быть настолько небольшими, и на выходы оказывается такое негативное влияние, что поле или участок поля должно быть оставлено до конца сезона сбора урожая.
На этапе 560, модуль 334 вычисления маршрутов формирует направления для одной или более уборочных машин 360. Направления могут содержать, для каждой уборочной машины 360, множество областей поля для сбора урожая. Направления также могут содержать порядок, в котором можно собирать урожай с областей поля, и направление 222 сбора урожая для каждой области поля. В одном примере, направления для одной или более уборочных машин 360 могут принимать во внимание эффективность маршрута для уборочной машины 360. Например, они могут разбивать области поля по уборочным машинам 360 таким образом, что отдельные уборочные машины 360 имеют самый прямой маршрут, минимизируя время для перемещения конкретной уборочной машины 360 между областями поля, в которых должен быть собран урожай, либо минимизируя маневрирование для того, чтобы достигать корректного направления 222 сбора урожая.
На этапе 570, компонент 330 связи предоставляет сформированные направления в одну или более уборочных машин 360 или их соответствующим водителям. В одном примере, направления могут передаваться с использованием компонента 350 связи, который затем может отображать их на поверхности уборочной машины 360. Компонент 350 связи также может доставлять принимаемые направления в двигательный и направляющий контроллер на уборочной машине 360.
Дополнительно, компонент 330 связи может предоставлять сформированные направления в устройство, конкретное для водителя. В одном варианте осуществления, направления принимаются водителем на мобильном устройстве, например, в качестве текстового сообщения или почтового сообщения либо в качестве уведомления через приложение, к которому водитель осуществляет доступ на мобильном устройстве, отдельном от уборочной машины 360.
Предоставленные направления могут содержать любое из порядка 572 участков, указывающего ранжированные области сбора урожая, карты 574, предоставленной для водителя, последовательности координат, предоставленных непосредственно для приемного GPS-устройства и модуля 578 управления, либо они могут быть любой другой информацией 582 направления. В одном примере, все или поднабор означенного предоставляются одновременно или по выбору водителем на основе предпочтений водителя. Например, карта 574 может предоставляться на экране пользовательского интерфейса в уборочной машине 360, вместе со списком 572 областей для сбора урожая и порядком для этих областей. В одном примере, области сбора урожая могут появляться выделенными яркостью на отображаемой карте 574, показывая направление сбора урожая.
Как показано на фиг. 5, последовательность 500 операций может повторяться по мере того, как аналитический компонент 340 принимает сигналы датчиков. Например, когда комбайны находятся в поле, они могут принимать информацию через датчики 356 устройств, что требует обновления сформированного плана сбора урожая. В другом примере, может приниматься новая информация относительно погодных условий, например, наступления шторма быстрее, чем ожидается, либо вообще его отсутствия. Это может вызывать изменение ранжирования областей сбора урожая, приводя к необходимости обновлять направления и текущий план сбора урожая. Дополнительно, может приниматься новая информация, указывающая то, что полеглая сельскохозяйственная культура возвращается в исходное положение или еще больше полегла.
Предоставление направлений в уборочную машину 360, например, на этапе 570, также может учитывать направление шнека уборочной машины 360 и способность переносить собранный материал из уборочной машины 360 в транспортное средство для перевозки материалов. Транспортное средство для перевозки материалов, например, может представлять собой самоходную тележку или фургон в сцепке с тягачом. Правила группировки также могут учитывать оцененное количество сельскохозяйственной культуры, которое должно быть собрано в данном проходе, например, чтобы направлять перемещение транспортного средства для перевозки материалов в сочетании с уборочными машинами 360. Дополнительно, правила группировки могут учитывать оцененное количество сельскохозяйственной культуры, которое должно быть собрано в данном проходе, при применении такого ограничения, что уборочная машина 360 должна собирать урожай рядом с ранее собранным проходом, так что собранная сельскохозяйственная культура может переноситься.
В одном примере, предоставление 570 направлений также может содержать определение, с помощью процессора 352, того, работает или нет уборочная машина 360 в соответствии с планом сбора урожая. Процессор 352 может определять то, следует или нет уборочная машина 360 в направлении 222 сбора урожая, и/или то, собирает она или нет урожай вовремя, на основе расчетных оценок, используемых посредством модуля 334 вычисления маршрутов. Информация мониторинга может использоваться для того, чтобы обновлять план сбора урожая, например, если область поля требует больше или меньше времени, чем ожидаемое время сбора урожая.
В одном примере, предоставление 570 направлений также может содержать настройки обработки материалов для подсистемы 355 обработки материалов. Предоставление 570 направлений также может содержать предоставление регулирований настроек обработки материалов.
Предоставление направлений, на этапе 570, также может содержать, по меньшей мере, некоторое автоматизированное управление уборочной машиной 360. Один пример некоторого автоматизированного управления сбора урожая может содержать, например, регулирование системы 352 питания, изменение выходной мощности или распределение мощности между подсистемами уборочной машины 360 по маршруту сбора урожая. Распределение мощности может изменяться, например, на основе позиции уборочной машины 360 по маршруту и на основе предполагаемой величины и/или направления 202 полегания. Оно также может содержать рулевой компонент 362 управления. Оно также может содержать управление двигательной системой 355 на основе величины или направления 202 полегания таким образом, что уборочная машина 360 зацепляет полеглую сельскохозяйственную культуру 210 с подходящей скоростью. Оно также может содержать управление подсистемой 355 обработки материалов.
Автоматизированное управление уборочной машиной 360 также может содержать формирование одной или более настроек для уборочного механизма 354, например, высоты и ориентации уборочной головки. Оно может включать в себя регулирование настроек механизма, например, на основе текущей позиции в поле и известной информации относительно полеглой сельскохозяйственной культуры непосредственно впереди текущей позиции.
Автоматическое направление также может содержать формирование настроек для обработки материалов посредством уборочной машины 360 и направление уборочной машины 360 таким образом, чтобы регулировать обработку материалов, на основе ее позиции в поле, ожидаемых и фактических выходов по урожаю или другой информации.
Фиг. 6 также иллюстрирует другой пример удаленной серверной архитектуры. Фиг. 6 показывает то, что также предполагается, что некоторые элементы по фиг. 3 располагаются в удаленном серверном местоположении 502, тогда как другие не располагаются. В качестве примера, хранилище 136 маршрутов или аналитический компонент 340 может располагаться в местоположении, отдельном от местоположения 502, и к нему может осуществляться доступ через удаленный сервер в местоположении 502. Независимо от того, в каком месте они расположены, доступ к ним может осуществляться непосредственно посредством уборочной машины 360 через сеть (глобальную вычислительную сеть или локальную вычислительную сеть), они могут хоститься на удаленном веб-узле посредством службы, либо они могут предоставляться в качестве службы или быть доступными посредством службы соединения, которая постоянно размещается в удаленном местоположении. Кроме того, данные могут сохраняться практически в любом местоположении и быть прерывисто доступными либо перенаправляться заинтересованным сторонам. Например, физические несущие могут использоваться вместо или в дополнение к электромагнитным несущим. В таком варианте осуществления, в котором покрытие соты является недостаточным или не существует, другая мобильная машина (к примеру, топливозаправщик) может иметь автоматизированную систему сбора информации. По мере того, как комбайн приближается к топливозаправщику для заправки топливом, система автоматически собирает информацию из комбайна с использованием любого типа произвольно организующегося беспроводного соединения. Собранная информация затем может перенаправляться в основную сеть, когда топливозаправщик достигает местоположения, в котором имеется покрытие сотовой связи (или другое покрытие беспроводной связи). Например, топливозаправщик может входить в местоположение с покрытием при движении, чтобы заправлять другие машины, или при нахождении в основном местоположении хранения топлива. Все эти архитектуры предположены в данном документе. Дополнительно, информация может сохраняться в комбайне до тех пор, пока комбайн не въедет в местоположение с покрытием. После этого сам комбайн может отправлять информацию в основную сеть.
Также следует отметить, что элементы по фиг. 3 или их части могут располагаться в широком спектре различных устройств. Некоторые из этих устройств включают в себя серверы, различные специальные виды компьютеров, планшетные компьютеры или другие мобильные устройства, такие как карманные компьютеры, сотовые телефоны, смартфоны, мультимедийные проигрыватели, персональные цифровые устройства и т.д. Также следует отметить, что элементы по фиг. 3, в частности, система 320 датчиков полегания, аналитический компонент 340 и уборочная машина 360, могут обмениваться данными друг с другом множеством способов. Например, система 320 датчиков полегания может обмениваться данными непосредственно с уборочной машиной или через удаленное местоположение 502.
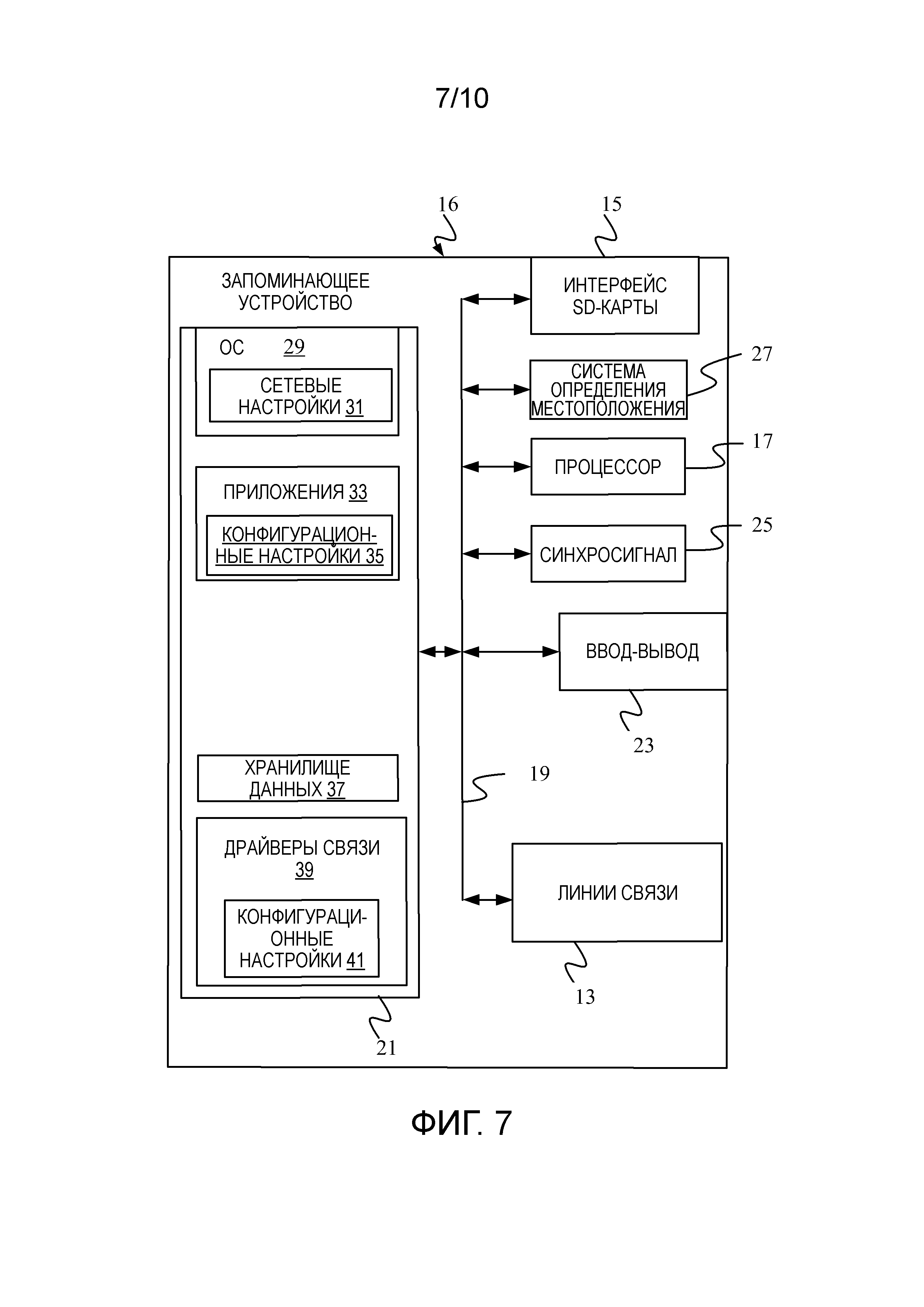
Фиг. 7 является упрощенной блок-схемой одного иллюстративного примера карманного или мобильного вычислительного устройства, которое может использоваться в качестве переносного устройства 16 пользователя или клиента, в котором может развертываться настоящая система (или ее части). Например, мобильное устройство может развертываться в кабине водителя уборочной машины 360 для использования при формировании, обработке или отображении любой информации, предоставляемой посредством системы 320 датчиков полегания, аналитического компонента 340 и/или уборочной машины 360. Фиг. 8-10 являются примерами карманных или мобильных устройств.
Фиг. 7 предоставляет общую блок-схему компонентов клиентского устройства 16, которое может запускать некоторые компоненты, показанные на фиг. 3, которое взаимодействует с ними, либо и то, и другое. В устройстве 16, предоставляется линия 13 связи, которая дает возможность карманному устройству обмениваться данными с другими вычислительными устройствами и в некоторых вариантах осуществления предоставляет канал для автоматического приема информации, к примеру, посредством сканирования. Примеры линии 13 связи включают в себя обеспечение возможности связи через один или более протоколов связи, к примеру, беспроводных служб, используемых для того, чтобы предоставлять сотовый доступ к сети, а также протоколов, которые предоставляют локальные беспроводные соединения с сетями.
В других примерах, приложения могут приниматься на съемной карте по стандарту Secure Digital (SD), которая соединяется с интерфейсом 15. Интерфейс 15 и линии 13 связи обмениваются данными с процессором 17 (который также может осуществлять процессор 114 из фиг. 1) по шине 19, которая также соединяется с запоминающим устройством 21 и компонентами 23 ввода-вывода, а также синхросигналом 25 и системой 27 определения местоположения.
Компоненты 23 ввода-вывода, в одном варианте осуществления, предоставляются для того, чтобы упрощать операции ввода и вывода. Компоненты 23 ввода-вывода для различных вариантов осуществления устройства 16 могут включать в себя компоненты ввода, такие как кнопки, датчики касания, оптические датчики, сенсорные экраны, бесконтактные датчики, акселерометры, датчики ориентации, и компоненты вывода, такие как устройство отображения, громкоговоритель и/или порт принтера. Также могут использоваться другие компоненты 23 ввода-вывода.
Синхросигнал 25 иллюстративно содержит компонент синхросигнала реального времени, который выводит время и дату. Он также может, иллюстративно, предоставлять функции синхронизации для процессора 17.
Система 27 определения местоположения иллюстративно включает в себя компонент, который выводит текущее географическое местоположение устройства 16. Он может включать в себя, например, приемное устройство на основе глобальной системы позиционирования (GPS), LORAN-систему, систему счисления пути, систему сотовой триангуляции или другую систему позиционирования. Он также может включать в себя, например, картографическое программное обеспечение или навигационное программное обеспечение, которое формирует требуемые карты, навигационные маршруты и другие географические функции.
Запоминающее устройство 21 сохраняет операционную систему 29, сетевые настройки 31, приложения 33, конфигурационные настройки 35 приложений, хранилище 37 данных, драйверы 39 связи и конфигурационные настройки 41 связи. Запоминающее устройство 21 может включать в себя все типы материальных энергозависимых и энергонезависимых машиночитаемых запоминающих устройств. Оно также может включать в себя компьютерные носители хранения данных (описаны ниже). Запоминающее устройство 21 сохраняет машиночитаемые инструкции, которые, при выполнении посредством процессора 17, инструктируют процессору выполнять реализованные с помощью компьютера этапы или функции согласно инструкциям. Процессор 17 может активироваться посредством других компонентов, чтобы также упрощать их функциональность.
Фиг. 8 показывает один пример, в котором устройство 16 представляет собой планшетный компьютер 600. На фиг. 8, компьютер 600 показан с экраном 602 пользовательского интерфейса. Экран 602 может представлять собой сенсорный экран или интерфейс с поддержкой перьевого ввода, который принимает вводы из пера или стилуса. Он также может использовать экранную виртуальную клавиатуру. Конечно, он также может быть присоединен к клавиатуре или другому устройству пользовательского ввода через подходящий механизм присоединения, такой как, например, линия беспроводной связи или USB-порт. Кроме того, компьютер 600 также может иллюстративно принимать речевые вводы.
Фиг. 9 показывает то, что устройство 16 может представлять собой смартфон 71. Смартфон 71 имеет сенсорный дисплей 73, который отображает значки или плитки либо другие механизмы 75 пользовательского ввода. Механизмы 75 могут использоваться пользователем для того, чтобы запускать приложения, выполнять вызовы, выполнять операции передачи данных и т.д. В общем, смартфон 71 компонуется на основе мобильной операционной системы и предлагает расширенные вычислительные возможности и возможности соединений по сравнению с традиционным мобильным телефоном.
Следует отметить, что возможны другие формы устройств 16.
Фиг. 10 является одним примером вычислительного окружения, в котором (например) могут развертываться элементы по фиг. 3 или их части. Со ссылкой на фиг. 10, примерная система для реализации некоторых вариантов осуществления включает в себя вычислительное устройство общего назначения в форме компьютера 810. Компоненты компьютера 810 могут включать в себя, но не только, процессор 820, системное запоминающее устройство 830 и системную шину 821, которая соединяет различные системные компоненты, включающие в себя системное запоминающее устройство, с процессором 820. Системная шина 821 может представлять собой любую из нескольких типов шинных структур, включающих в себя шину запоминающего устройства или контроллер запоминающего устройства, периферийную шину и локальную шину с использованием любой из множества шинных архитектур. Запоминающее устройство и программы, описанные относительно фиг. 3, могут развертываться в соответствующих частях по фиг. 10.
Компьютер 810 типично включает в себя множество машиночитаемых носителей. Машиночитаемые носители могут представлять собой любые носители, которые могут быть доступными посредством компьютера 810, и они включают в себя энергозависимые и энергонезависимые носители, съемные и стационарные носители. В качестве примера, а не ограничения, машиночитаемые носители могут содержать компьютерные носители хранения данных и среды связи. Компьютерные носители хранения данных отличаются и не включают в себя модулированный сигнал данных или несущую. Они включают в себя аппаратные носители хранения данных, включающие в себя энергозависимые и энергонезависимые, съемные и стационарные носители, реализованные любым способом или технологией хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Компьютерные носители хранения данных включают в себя, но не только, RAM, ROM, EEPROM, флэш-память, или другую технологию запоминающих устройств, CD-ROM, цифровые универсальные диски (DVD) или другое устройство хранения данных на оптических дисках, магнитные кассеты, магнитную ленту, устройство хранения данных на магнитных дисках или другие магнитные устройства хранения данных, либо любой другой носитель, который может быть использован для того, чтобы сохранять требуемую информацию, и к которому может быть осуществлен доступ посредством компьютера 810. Среда связи может осуществлять машиночитаемые инструкции, структуры данных, программные модули или другие данные в транспортном механизме и включает в себя любые среды доставки информации. Термин "модулированный сигнал данных" означает сигнал, который имеет одну или более характеристик, заданных или измененных таким образом, чтобы кодировать информацию в сигнале.
Системное запоминающее устройство 830 включает в себя компьютерные носители хранения данных в форме энергозависимого и/или энергонезависимого запоминающего устройства, такого как постоянное запоминающее устройство 831 (ROM) и оперативное запоминающее устройство 832 (RAM). Базовая система 833 ввода/вывода (BIOS), содержащая базовые процедуры, которые помогают передавать информацию между элементами в пределах компьютера 810, к примеру, во время запуска, типично сохранена в ROM 831. RAM 832 типично содержит данные и/или программные модули, которые являются непосредственно доступными и/или в данный момент обрабатываются в процессоре 820. В качестве примера, но не ограничения, фиг. 10 иллюстрирует операционную систему 834, прикладные программы 835, другие программные модули 836 и программные данные 837.
Компьютер 810 также может включать в себя другие съемные/стационарные, энергозависимые/энергонезависимые компьютерные носители хранения данных. Только в качестве примера, фиг. 10 иллюстрирует жесткий диск 841, который считывает или записывает в стационарные энергонезависимые магнитные носители, накопитель 855 на оптических дисках и энергонезависимый оптический диск 856. Жесткий диск 841 типично соединяется с системной шиной 821 через интерфейс стационарного запоминающего устройства, такой как интерфейс 840, а накопитель 855 на оптических дисках типично соединяется с системной шиной 821 посредством интерфейса съемного запоминающего устройства, такого как интерфейс 850.
Альтернативно или помимо этого, функциональность, описанная в данном документе, может выполняться, по меньшей мере, частично, посредством одного или более аппаратных логических компонентов. Например, и без ограничения, иллюстративные типы аппаратных логических компонентов, которые могут быть использованы, включают в себя программируемые пользователем вентильные матрицы (FPGA), специализированные интегральные схемы (ASIC), специализированные микросхемы для массового производства (ASSP), внутрикристальные системы (SOC), комплексные программируемые логические устройства (CPLD) и т.д.
Накопители и ассоциированные с ними носители хранения для компьютера, поясненные выше и проиллюстрированные на фиг. 10, обеспечивают хранение машиночитаемых инструкций, структур данных, программных модулей и других данных для компьютера 810. На фиг. 10, например, накопитель 841 на жестких дисках проиллюстрирован как сохраняющий операционную систему 844, прикладные программы 845, другие программные модули 846 и программные данные 847. Следует отметить, что эти компоненты могут или быть аналогичными или отличаться от операционной системы 834, прикладных программ 835, других программных модулей 836 и программных данных 837.
Пользователь может вводить команды и информацию в компьютер 810 через устройства ввода, такие как клавиатура 862, микрофон 863 и указательное устройство 861, к примеру, мышь, шаровой манипулятор или сенсорная панель. Другие устройства ввода (не показаны) могут включать в себя джойстик, игровой планшет, спутниковую антенну, сканер и т.п. Эти и другие устройства ввода зачастую соединяются с процессором 820 через интерфейс 860 пользовательского ввода, который соединяется с системной шиной, но могут быть соединены посредством других интерфейсных и шинных структур. Видеодисплей 891 или другой тип устройства отображения также соединяется с системной шиной 821 посредством такого интерфейса, как видеоинтерфейс 890. Помимо монитора, компьютеры также могут включать в себя другие периферийные устройства вывода, например, громкоговорители 897 и принтер 896, которые могут быть соединены через периферийный интерфейс 895 вывода.
Компьютер 810 работает в сетевом окружении с использованием логических соединений (таких как локальная вычислительная сеть (LAN), внутрикабинная вычислительная сеть (CAN) или глобальная вычислительная сеть (WAN)) с одним или более удаленных компьютеров, таких как удаленный компьютер 880.
При использовании в сетевом LAN-окружении, компьютер 810 соединяется с LAN 871 через сетевой интерфейс или адаптер 870. При использовании в CAN-окружении, компьютер 810 соединяется посредством подходящего интерфейса и проводного или беспроводного соединения. При использовании в сетевом WAN-окружении, компьютер 810 типично включает в себя модем 872 или другое средство для установления связи через WAN 873, такую как Интернет. В сетевом окружении, программные модули могут сохраняться на удаленном запоминающем устройстве. Фиг. 10 иллюстрирует, например, то, что удаленные прикладные программы 885 могут постоянно размещаться на удаленном компьютере 880.
Также следует отметить, что различные варианты осуществления, описанные в данном документе, могут комбинироваться по-разному. Иными словами, части одного или более вариантов осуществления могут комбинироваться с частями одного или более других вариантов осуществления. Все это предполагается в данном документе.
Пример 1 представляет собой систему генератора маршрутов сбора урожая, которая формирует маршрут сбора урожая для уборочной машины, причем генератор маршрутов сбора урожая содержит:
- генератор маршрутов, который принимает информацию полеглых сельскохозяйственных культур из системы датчиков, указывающую характеристику полеглой сельскохозяйственной культуры в поле, и формирует маршрут сбора урожая через поле для уборочной машины, на основе информации полеглых сельскохозяйственных культур; и
- компонент связи, который передает маршрут сбора урожая через поле в уборочную машину.
Пример 2 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, дополнительно содержащую:
- компонент группировки, который осуществляет доступ к набору правил группировки и собирает в группу области поля на основе информации полеглых сельскохозяйственных культур и правил группировки и предоставляет индикатор относительно сгруппированных областей поля в генератор маршрутов.
Пример 3 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой информация полеглых сельскохозяйственных культур содержит величину полегания и ориентацию полегания в поле, при этом компонент группировки выполнен с возможностью группировать области поля в сгруппированные области на основе подобия информации полегания для сгруппированных областей.
Пример 3 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой генератор маршрутов выполнен с возможностью формировать маршрут сбора урожая через поле на основе сгруппированных областей и информации полегания, соответствующей сгруппированным областям.
Пример 4 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой компонент группировки выполнен с возможностью коррелировать сгруппированные области с географической позицией в поле и формировать карту полегания в поле со сгруппированными областями, коррелированными с величиной и ориентацией полегания и коррелированными с географической позицией в поле.
Пример 5 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой компонент группировки идентифицирует набор исключенных областей, которые исключаются из маршрута сбора урожая, на основе информации полегания для исключенных областей и на основе правил группировки.
Пример 6 представляет собой генератор маршрутов сбора урожая по любому или всем из предыдущих примеров, дополнительно содержащий:
- датчик полегания, который считывает величину полегания и ориентацию полегания.
Пример 7 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой датчик полегания содержит:
- датчик изображений, который считывает изображение сельскохозяйственной культуры и формирует величину полегания и ориентацию полегания на основе считываемого изображения.
Пример 8 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой датчик полегания содержит, по меньшей мере, одно из следующего:
- датчик текстуры поля, который считывает текстуру поля, или датчик поверхности поля, который считывает характеристики поверхности сельскохозяйственной культуры на поле.
Пример 9 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, дополнительно содержащую, по меньшей мере, одно из следующего:
- летательный аппарат, который переносит датчик полегания, или наземное транспортное средство, которое переносит датчик полегания.
Пример 10 представляет собой систему генератора маршрутов сбора урожая по любому или всем из предыдущих примеров, в которой датчик полегания дополнительно содержит:
- датчик высоты слома, который считывает высоту слома полеглой сельскохозяйственной культуры.
Пример 11 представляет собой уборочную машину, содержащую:
- двигательную и рулевую подсистему, которая приводит в движение и рулит уборочной машиной через поле;
- набор подсистем сбора урожая, которые выполняют операции сбора урожая и погрузки-разгрузки материалов, чтобы собирать урожай сельскохозяйственной культуры из поля; и
- контроллер, который принимает информацию полегания, указывающую характеристики полегания полеглой сельскохозяйственной культуры в поле, и который формирует управляющий сигнал подсистемы на основе информации полегания, с тем чтобы управлять, по меньшей мере, одной из подсистем.
Пример 12 представляет собой уборочную машину по любому или всем из предыдущих примеров, дополнительно содержащую:
- датчик позиции, который считывает позицию уборочной машины в поле и формирует позиционный сигнал, указывающий позицию комбайна в поле, при этом контроллер принимает информацию полегания в качестве ориентации полегания и величины полегания, коррелированной с географической позицией в поле, и формирует управляющий сигнал подсистемы на основе информации полегания и позиции уборочной машины в поле.
Пример 13 представляет собой уборочную машину по любому или всем из предыдущих примеров, в которой контроллер формирует управляющий сигнал подсистемы, чтобы регулировать мощность в подсистемах на основе информации полегания, по мере того, как уборочная машина перемещается через поле.
Пример 14 представляет собой уборочную машину по любому или всем из предыдущих примеров, в которой контроллер дополнительно содержит:
- маршрутный контроллер, который формирует маршрут через поле на основе информации полегания.
Пример 15 представляет собой уборочную машину по любому или всем из предыдущих примеров, в которой контроллер выполнен с возможностью формировать управляющий сигнал подсистемы, чтобы управлять двигательной и рулевой подсистемой таким образом, чтобы направлять уборочную машину через поле на основе маршрута.
Пример 16 представляет собой уборочную машину по любому или всем из предыдущих примеров, в которой контроллер выполнен с возможностью формировать управляющий сигнал подсистемы, с тем чтобы отображать маршрут в пользовательском интерфейсе для водителя уборочной машины.
Пример 17 представляет собой уборочную машину по любому или всем из предыдущих примеров, в которой одна из набора подсистем включает в себя уборочную головку для сельскохозяйственных культур, при этом контроллер выполнен с возможностью формировать управляющий сигнал подсистемы для того, чтобы управлять работой уборочной головки для сельскохозяйственных культур по мере того, как уборочная машина перемещается через поле, на основе информации полегания.
Пример 18 представляет собой уборочную машину по любому или всем из предыдущих примеров, дополнительно содержащую:
- датчик уборочной машины, который считывает характеристику поля или сельскохозяйственной культуры по мере того, как уборочная машина перемещается через поле, при этом маршрутный контроллер выполнен с возможностью регулировать маршрут через поле на основе считываемой характеристики.
Пример 19 представляет собой реализованный с помощью компьютера способ формирования маршрута сбора урожая для уборочной машины, при этом способ содержит:
- прием информации полеглых сельскохозяйственных культур, указывающей величину полегания и ориентацию полегания полеглой сельскохозяйственной культуры в поле;
- формирование маршрута сбора урожая через поле для уборочной машины, на основе информации полеглых сельскохозяйственных культур; и
- передачу маршрута сбора урожая через поле в уборочную машину.
Пример 20 представляет собой реализованный с помощью компьютера способ по любому или всем из предыдущих примеров, дополнительно содержащий:
- осуществление доступа к набору правил группировки и объединение в группу областей поля на основе подобия в информации полеглых сельскохозяйственных культур и на основе правил группировки;
- корреляцию сгруппированных областей с географической позицией в поле;
- формирование карты полегания в поле со сгруппированными областями, коррелированными с величиной и ориентацией полегания и коррелированными с географической позицией в поле; и
- предоставление карты полегания в поле в генератор маршрутов, при этом формирование маршрута сбора урожая содержит формирование маршрута сбора урожая через поле на основе карты полегания в поле.
Хотя предмет изобретения описан на языке, характерном для структурных признаков и/или технологических этапов, следует понимать, что предмет изобретения, заданный в прилагаемой формуле изобретения, не обязательно ограничен характерными признаками или этапами, описанными выше. Вместо этого, характерные признаки и этапы, описанные выше, раскрываются как примерные формы реализации формулы изобретения.
Реферат
Группа изобретений относится к сельскому хозяйству, а именно к уборке урожая сельскохозяйственными машинами. Система генератора маршрутов сбора урожая формирует маршрут сбора урожая для уборочной машины. Система генератора маршрутов сбора урожая имеет генератор маршрутов, который принимает информацию полеглых сельскохозяйственных культур из системы датчиков, указывающую характеристику полеглой сельскохозяйственной культуры в поле, и формирует маршрут сбора урожая через поле для уборочной машины. Формирование маршрута производится на основе информации полеглых сельскохозяйственных культур. Система генератора маршрутов сбора урожая также имеет компонент связи, который передает маршрут сбора урожая через поле в уборочную машину. Использование группы изобретений позволит повысить качество уборки урожая. 3 н. и 18 з.п. ф-лы, 6 ил.
Комментарии