Устройство для равномерной загрузки сельхозмашины - RU2376746C2
Код документа: RU2376746C2
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственной машине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
В патентном документе ФРГ №3811649 описан пресс для формирования тюков, прицепленный к трактору. Поток убранной массы принимается подборщиком пресса, сводится поперечным транспортирующим шнеком до ширины прессовального канала и направляется к прессовальному устройству. С помощью копирных щупов, установленных над подборщиком подвижно по высоте, непрерывно определяется распределение убранной массы по ширине потока, при этом с копирными щупами связаны измерительные датчики. В зависимости от сигналов, генерируемых измерительными датчиками, приводится в действие исполнительный орган, посредством которого поперечный транспортирующий шнек смещается в боковую сторону относительно подборщика. За счет этого поток убранной массы направляется к середине прессовального устройства, что обеспечивает постоянную центральную загрузку прессовальной камеры. Это устройство принято в качестве наиболее близкого аналога заявляемого изобретения.
Недостаток этого известного устройства в прессе для формирования тюков состоит в том, что при центральной загрузке не достигается равномерного заполнения прессовальной камеры по всей ее ширине, так как валок, как правило, имеет ширину меньше ширины прессовальной камеры, а его высота в середине больше, чем на боковых кромках. В результате заполнение прессовальной камеры уменьшается к ее боковым краям, что ведет к формированию неравномерных по плотности тюков. Неравномерно уплотненные тюки плохо удерживаются обвязочным шпагатом, проходящим в продольном направлении. Зачастую такие тюки разваливаются при транспортировке или складировании и уже не могут быть использованы.
Для равномерного заполнения прессовальной камеры в прессах требуется переменное в поперечном направлении поступление валка в прессовальную камеру за счет соответствующего маневрирования трактора. Для этого водитель трактора должен одновременно направлять его вдоль линии валка на поле и при этом обеспечивать поступление убранной массы в пресс и равномерное заполнение пресса путем ручного управления движением по волнистой траектории.
При использовании в сельском хозяйстве грузовых тележек для оптимального заполнения кузова также требуется оценка и мастерство водителя трактора. В отношении грузовых тележек оптимизация дополнительно затрудняется тем, что ширина подборщика примерно соответствует ширине кузова. При ручном управлении движением сельхозмашины требуется выдерживать определенное безопасное расстояние до кромки подборщика, что автоматически определяет неполное использование всей ширины подборщика и кузова, а следовательно, и неполное использование транспортных возможностей.
Ручное управление заполнением рабочих орудий, таких как прессы для формирования тюков или грузовые тележки, зависит от способностей и оценки водителя трактора. Качество и эффективность работы рабочих орудий снижается в особенности в темное время или в условиях плохой видимости.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании устройства, которое обеспечивает устранение недостатков известных решений уровня техники и равномерное заполнение рабочих орудий.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков, изложенных в пункте 1 формулы изобретения. Дальнейшие предпочтительные примеры осуществления и дополнительные решения по развитию изобретения изложены в зависимых пунктах.
Согласно изобретению вычислительное устройство вырабатывает для устройства управления поворотом сигнал управления поворотом по меньшей мере из одного первого сигнала положения и по меньшей мере одного дополнительного сигнала стратегии заполнения, характерной для рабочего орудия. За счет этого для сельхозмашины, автоматически ведомой по колее движения, выгодным образом обеспечивается специальная стратегия движения для оптимального заполнения рабочего орудия, оснащенного накопителем убранной массы. Одно и то же устройство по изобретению может использоваться при различных рабочих условиях и для различных рабочих орудий. Благодаря учету сигнала положения и соответствующего сигнала стратегии заполнения могут автоматически компенсироваться такие влияния как неравномерность валков, движение по криволинейному пути, неравномерное заполнение накопителя убранной массы или работа на косогоре. В результате достигается получение равномерно уплотненных тюков убранной массы или оптимальное использование грузоподъемности грузовой тележки с одновременным освобождением водителя трактора от выполнения этих задач.
В первом примере выполнения изобретения вычислительное устройство в зависимости по меньшей мере от одного сигнала заполнения и/или от параметров, времени, пути и/или урожайности вырабатывает сигнал стратегии заполнения, характерной для рабочего орудия, и из него генерирует смещение, переменное по направлению, относительно сигнала положения. Предпочтительно, вычислительное устройство вырабатывает точный сигнал управления поворотом, который обеспечивает точное следование по линии валка с учетом оптимальных предварительных данных заполнения для рабочего орудия. Предпочтительно, заполнение автоматически управляется в зависимости от действительного заполнения накопителя убранной массы и/или по меньшей мере от одного рабочего параметра, времени, пути и/или урожайности и осуществляется путем движения по волнистой линии (траектории). При этом каждый цикл заполнения накопителя убранной массы может производиться путем движения по одной и той же волнистой линии. Таким образом, результат работы больше не зависит исключительно от способностей водителя и условий видимости.
В предпочтительном примере выполнения положение валка воспринимается по меньшей мере одним устройством определения положения, а вычислительным устройством обрабатываются по меньшей мере середина валка в качестве задающей величины и сигнал положения. Предпочтительным образом базой для ведения по колее является точное определение положения валка относительно сельхозмашины и в особенности определение середины валка в качестве задающей величины и сигнала положения, что обеспечивает надежный прием валка с помощью подборщика. Кроме того, за счет восприятия положения валка обеспечивается возможность точного расчета входа валка в рабочее орудие и предварительное определение влияний на заполнение накопителя убранной массы. Восприятие положения валка позволяет вычислительному устройству генерировать сигнал управления поворотом с учетом задающей величины и ширины валка.
В предпочтительном примере выполнения устройства определения положения оно снабжено оптическим или оптоэлектронным датчиком, который воспринимает поле регистрации, включающее в себя по меньшей мере одну задающую величину. Оптические или оптоэлектронные датчики имеют обширное поле регистрации и работают бесконтактным образом. При соответствующей установке на сельхозмашине они обеспечивают опережающее восприятие валка перед сельхозмашиной и точное определение формы валка. Из считываемого контура валка могут быть вычислены и учтены при направлении по колее движения середина валка в качестве задающей величины и сигнал положения, а также кромки валка. За счет этого выгодным образом обеспечивается возможность выработки вычислительным устройством сигнала управления поворотом, который дает возможность полного использования ширины подборщика рабочего орудия. Другими словами, обеспечивается генерирование волнистой линии с максимальным поперечным смещением относительно середины валка и исключение потерь убранной массы.
В предпочтительном примере выполнения устройства определения положения оно снабжено по меньшей мере одним копирным щупом, который воспринимает положение валка за счет отклонения по меньшей мере одного копирного щупа посредством датчика угла поворота и в зависимости от положения валка генерирует сигнал положения. За счет этого обеспечивается возможность восприятия относительного положения валка и форма его поперечного сечения в области подборщика. Предпочтительно эти копирные щупы с датчиками угла поворота могут быть соответствующим образом подобраны для рабочего орудия, они прочны по конструкции и показали себя надежными при использовании в сельскохозяйственных машинах.
В предпочтительном примере выполнения сельхозмашина оснащена по меньшей мере одним навигационным устройством, причем от навигационного устройства обеспечивается по меньшей мере один сигнал положения для вычислительного устройства. За счет наличия в распоряжении установленного положения сельхозмашины с помощью устройства опережающего определения положения может с опережением определяться и записываться в запоминающем устройстве линия валка, а следовательно, и колея движения сельхозмашины. На основе действительного установленного положения и предварительно записанной линии валка вычислительное устройство может передавать на устройство управления поворотом точный сигнал управления поворотом.
В примере развития изобретения сельхозмашина оснащена по меньшей мере одной системой маршрутизации, причем от системы маршрутизации обеспечивается по меньшей мере один сигнал положения для вычислительного устройства. Благодаря использованию системы маршрутизации, например, при генерировании линии валка может использоваться записанная линия валка, надежно распознаваться положение валка и с учетом действительного установленного положения сельхозмашины вырабатываться сигнал положения. За счет этого устраняется необходимость повторного восприятия положения валка при его подборе сельхозмашиной, так что в этом случае можно с выгодой обойтись без оснащения сельхозмашины устройством определения положения. Кроме того, благодаря известности всей линии валка обеспечивается возможность сколь угодно заблаговременного вычисления сигналов управления поворотом с учетом сигналов стратегии заполнения в соответствии с изобретением. Результатом является стабильное регулирование системы управления поворотом.
Для точной и равномерной загрузки сельхозмашины вычислительное устройство определяет заполнение рабочего орудия убранной массой с помощью по меньшей мере одного датчика и в зависимости от установленного заполнения рабочего орудия генерирует сигнал стратегии заполнения, характерной для рабочего орудия. За счет этого выгодным образом достигается определение фактического состояния заполнения накопителя убранной массы, которое может соответствующим образом учитываться вычислительным устройством. При этом с помощью по меньшей мере одного датчика надежно и непосредственно распознаются изменяющиеся свойства убранной массы в отношении ее способности к уплотнению, что обеспечивает возможность динамичной адаптации сигнала стратегии заполнения.
Установлено, что в рабочем орудии, выполненном в виде пресса для формирования тюков, предпочтительным является определение заполнения пресса посредством вычислительного устройства с помощью по меньшей мере двух датчиков расстояния, расположенных на расстоянии от шатунов, путем сравнения величин получаемых от них сигналов заполнения. При таком получении сигналов используется эффект изгиба шатунов в поршневом приводе, пропорционального усилию прессования. Сравнение величин обоих сигналов заполнения надежно указывает распределение убранной массы в прессовальной камере без какого-либо контакта с убранной массой.
При выполнении рабочего орудия в виде грузовой тележки предпочтительно, когда заполнение грузовой тележки определяется вычислительным устройством с помощью по меньшей мере двух копирных щупов, выступающих в кузов, путем сравнения величин получаемых от них сигналов заполнения. В кузове грузовой тележки происходит небольшое перемещение убранной массы, поэтому срабатывание и износ копирных щупов невелики. Кроме того, копирные щупы пригодны в качестве датчиков заполнения, в особенности благодаря их способности контактировать с убранной массой с определенным предварительным напряжением и за счет этого определять наличие и уплотнение убранной массы в кузове.
В предпочтительном примере выполнения сельхозмашина представляет собой трактор с прицепленным к нему прессом для формирования тюков или прицепленной грузовой тележкой, при этом по меньшей мере один сигнал положения используется для автоматического ведения трактора по колее, а сигнал стратегии заполнения, характерной для рабочего орудия, используется для автоматического перемещения/поворота устройства определения положения и/или дышла. Такое разделение сигнала от вычислительного устройства для оптимальной загрузки сельхозмашины дает то преимущество, что при перемещении или повороте устройства определения положения могут использоваться простые механические средства. Кроме того, водитель может визуально следить за процессом управления рабочим орудием. При управлении дышлом трактор не должен выполнять никаких перемещений в стороны относительно валка, что снижает опасность проезда по валку и создает для водителя более комфортные условия езды.
За счет того, что в вычислительном устройстве имеется по меньшей мере одно запоминающее устройство, в котором заложены по меньшей мере две характеристические кривые стратегии заполнения, при генерировании сигнала стратегии заполнения, характерной для рабочего орудия, можно опираться на различные характеристические кривые стратегии заполнения, а также могут быть записаны специальные данные заполнения, предварительно заданные водителем.
В предпочтительном примере выполнения при генерировании сигнала управления поворотом вычислительным устройством учитываются ширина валка и/или ширина подборщика. Ширина валка и ширина подборщика задают вычислительному устройству максимальные возможные величины смещения в обе стороны от середины валка. Благодаря учету этих величин обеспечивается возможность очень точного ведения рабочего орудия по колее движения с использованием всей ширины подборщика до боковых кромок валка и за счет этого равномерное заполнение накопителя убранной массы по всей его ширине.
Другие предпочтительные примеры выполнения защищены в зависимых пунктах формулы изобретения.
Перечень чертежей
Далее со ссылками на прилагаемые чертежи будет подробно описан пример осуществления изобретения, не вносящий каких-либо ограничений. На чертежах:
фиг.1 изображает на виде сверху трактор с прицепленным к нему прессом для формирования тюков,
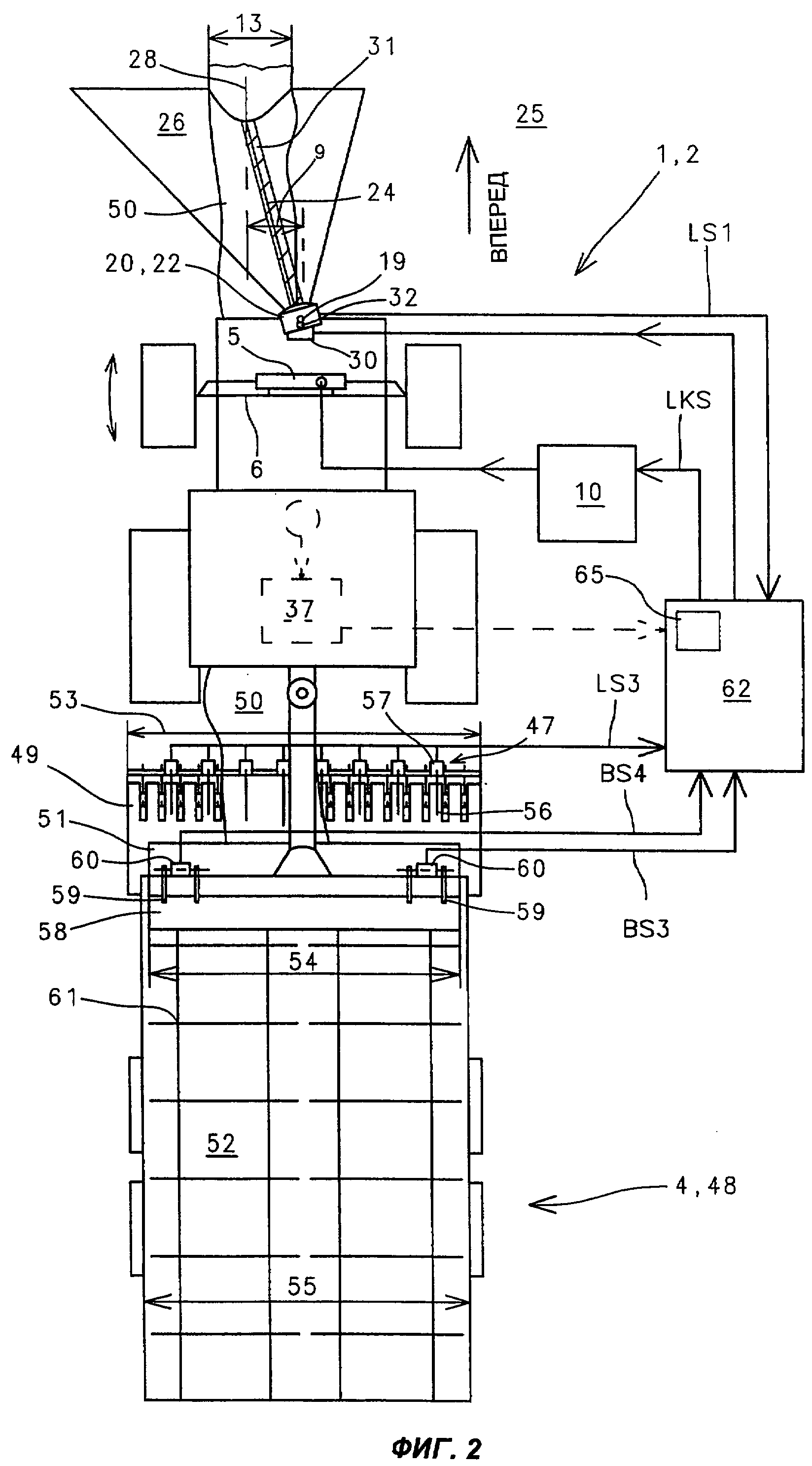
фиг.2 изображает на виде сверху трактор с прицепленной к нему грузовой тележкой,
фиг.3 изображает функциональную схему процесса в вычислительном устройстве.
Осуществление изобретения
Фиг.1 изображает на виде сверху сельхозмашину 2 в виде комплекса машин, состоящего из трактора 1 и прицепленного к нему рабочего орудия 4, выполненного в виде пресса 3 для формирования тюков. Показанный в этом примере выполнения трактор 1 содержит управляемую переднюю ходовую ось 6, которая управляется первым исполнительным элементом 5 для изменения направления ВПЕРЕД движения трактора 1. Пресс 3 для формирования тюков прицеплен к трактору 1 посредством дышла 7, которое шарнирно соединено как с прессом 3, так и с трактором 1. Между трактором 1 и дышлом 7 пресса 3 расположен другой исполнительный элемент 8, с помощью которого может регулироваться колея движения пресса 3 относительно колеи трактора 1 и место входа валка 11 на подборщик 12 пресса. Следует отметить, что описанное далее решение может использоваться не только для регулирования дышла 7, а также и в самоходной сельхозмашине.
Трактор 1 оснащен автоматическим устройством 10 управления поворотом, которое содержит известные из уровня техники средства управления и предохранительные средства и обеспечивает направление трактора 1 вдоль валка 11 при рабочем движении уборки на поле 25. Если трактор 1 отклоняется от заданной колеи движения, автоматическое устройство 10 управления поворотом посредством исполнительного элемента 5 воздействует на управляемую переднюю ходовую ось 6 для выполнения корректирующих действий и выдерживания колеи движения. Далее, специалисту в данной области известно, каким образом можно оснастить ходовые оси рабочего орудия 4 не представленным здесь устройством управления поворотом для смещения колеи движения пресса 3 относительно колеи трактора 1. В рамках изобретения предусмотрено, что трактор 1 может быть оснащен системой управления поворотом для всех управляемых колес.
Валок 11, вдоль которого проходит трактор 1, подбирается подборщиком 12 пресса 3 для формирования тюков. Обычно валок 11 имеет ширину 13 валка меньше расстояния между колесами передней или задней оси 6 трактора 1, так что колеса трактора 1 не едут по валку. Что касается подборщика 12, его ширина 14 приема как правило превышает ширину 13 валка, так что валок подбирается по всей его ширине. Посредством транспортирующих шнеков 15, расположенных на подборщике 12 с боковых сторон, валок сводится до ширины 16 проходного канала пресса и с помощью не показанных дополнительных транспортирующих средств подается в прессовальную камеру 18 пресса 3 для формирования тюков. На тракторе 1, в данном примере выполнения в его передней области, расположено устройство 20 определения положения, которое может автоматически поворачиваться вокруг вертикальной оси 19 поворота. Это устройство 20 с помощью обращенного в направлении ВПЕРЕД движения трактора 1 сканирующего луча 21 оптоэлектронного датчика 22 с опережением считывает расстояние от устройства 20 определения положения до поля 25 и валка 11.
В качестве устройства определения положения может использоваться любое известное устройство механического или бесконтактного действия. Основным критерием является возможность выработки задающей величины 28 в виде сигнала LS1 положения, представляющего положение середины валка 11 относительно сельхозмашины 2 или подборщика 12. Представленное здесь устройство 20, 22 определения положения определяет расстояние между ним и полем 25 или валком 11 на основе измерения длительности промежутков времени между посылаемыми световыми импульсами и соответствующими принимаемыми световыми импульсами, отраженными от поля 25 или валка 11. В показанном примере выполнения сканирующий луч 21 совершает сканирование в горизонтальной плоскости вокруг по существу вертикальной оси относительно устройства 20 определения положения и считывает бесконтактным образом контур валка 11 или поля 25 в своей области 26 регистрации. Контур определяется по сигналам расстояния, генерируемым устройством 20 определения положения, в сочетании с ориентацией сканирующего луча 21 относительно трактора 1, и соответственно вырабатывается определяемая задающая величина 28 и сигнал LS1 положения. В данном примере выполнения устройство 20 определения положения распознает кратчайшее расстояние между валком 11 и устройством 20 как задающую величину 28, причем как правило это расстояние определяется до середины валка 11. Следует упомянуть, что обработка отдельных установленных величин расстояния в области 26 регистрации и распознаваемого контура может выполняться также в вычислительном устройстве 62, которое будет описано далее более подробно, или в других устройствах с целью определения, например, ширины, объема или поперечного сечения валка.
На крыше кабины трактора 1 расположено по меньшей мере одно навигационное устройство 34, например, в виде антенны GPS (Global Positioning System - глобальная система навигации и определения местоположения), которая вырабатывает сигнал PS положения трактора 1 на поле 25 в системе земных координат и передает его по меньшей мере на вычислительное устройство 62. Отдельные положения трактора 1 могут быть заложены в запоминающем устройстве 65 и затем зарегистрированы вычислительным устройством 62 для распознавания направления ВПЕРЕД движения сельхозмашины 2 на поле или зарегистрированы в сочетании с результатами работы пресса 3 для формирования тюков, такими как положение укладки тюка на поле или длина подбираемого валка для формирования одного тюка. В соответствии с изобретением действительное положение навигационного устройства 34 может быть пересчитано (и записано в память) в действительное положение валка 11 в системе земных координат на основе известных геометрических размеров трактора 1 и положения задающей величины 28 или контура, определенного устройством 20 определения положения, в сочетании с направлением ВПЕРЕД движения. За счет этого линия валка может быть с опережением преобразована в заданную колею движения трактора 1. В этом случае вычислительное устройство 62 может при проходе вдоль валка генерировать сигнал LS2 действительного положения на основе записанной линии валка и навигационного положения машины, определяемого навигационным устройством 34. Сигнал LS1, LS2 указывает как правило середину валка 11, а следовательно, и задающую величину 28. На основе учета только одного сигнала LS1, LS2 положения вычислительное устройство 62 может производить управление автоматическим устройством 10 управления поворотом для центрального приема валка 11 в прессовальную камеру 18.
Согласно изобретению предусмотрено использование системы 37 маршрутизации на тракторе 1. В соответствии с описанным выше способом система 37 маршрутизации автоматически определяет абсолютную линию валка, в данном случае, посредством связи 17 передачи данных через вычислительное устройство 62 с устройством 20, 22 определения положения, и генерирует сигнал LS2 на основе действительного положения трактора 1. Для этого между системой 37 маршрутизации и вычислительным устройством 62 имеется известная из уровня техники двунаправленная связь 17 передачи данных, такая как, например, шина CAN (асинхронная последовательная коммуникационная шина). Использование системы 37 маршрутизации позволяет выгодным образом производить обработку линии валка, полученной другими средствами, передачу дополнительных характерных данных валка, таких как плотность, масса, форма поперечного сечения, задающая величина 28 и ширина 13 валка. В ходе работы сельхозмашины 2 на поле 25 или перед работой в систему 37 маршрутизации с помощью известных средств может быть передана по меньшей мере линия валка в системе земных координат. В этом случае система 37 маршрутизации кроме генерирования сигнала LS2 положения может также предлагать оптимизированный маршрут для подбора валка 11. При этом возможна разработка специального маршрута с учетом запаздывания прицепных рабочих орудий 3, 4, 48 при движении на криволинейных участках и при криволинейной линии валка и за счет этого сужение или расширение максимальных допустимых величин смещения 9. Система 37 маршрутизации может вводить этот фактор влияния непосредственно в сигнал LS2 положения и дополнительно передавать корректировку смещения на вычислительное устройство 62 через связь 17 передачи данных. Само собой разумеется, что вычислительное устройство 62 может автоматически производить корректировку смещения для согласования ширины 14 приема с шириной 13 валка.
В тракторе 1 имеется операторский терминал 27 для управления устройством по изобретению. С помощью этого операторского терминала 27 могут выбираться или изменяться указанные специфические величины валка или введенные данные рабочего орудия 4 или его параметры. Кроме того, с его помощью может производиться выбор и регулировка желаемых характеристических кривых стратегии заполнения. Связь операторского терминала 27 осуществляется с помощью системы обмена данными, известной специалистам в данной области, например, системой ISO-Bus (ISO - International Organization for Standardization - Международная организация по стандартизации), которой оснащаются сельхозмашины 2. Все используемые рабочие орудия 4 и аппараты управления трактора 1 могут обмениваться данными с операторским терминалом 27 и вычислительным устройством 62 с помощью известной шины передачи данных для управления рабочим процессом.
Показанный на фиг.1 пресс 3 для формирования тюков выполнен в виде пресса 38 для формирования прямоугольных тюков, в котором в прессовальной камере 18 возвратно-поступательно перемещается прессующий поршень 40, приводимый двумя отстоящими друг от друга шатунами 39. Убранная масса подается в прессовальную камеру 18 снизу при отведенном поршне 40 и затем уплотняется в тюк при ходе поршня в прессовальной камере в направлении, противоположном направлению ВПЕРЕД движения машины. Если слой поданной убранной массы распределен неравномерно по ширине 16 прессовального канала, в шатунах 39 создаются отличные друг от друга усилия прессования, что приводит к различному изгибу шатунов 39. Этот изгиб воспринимается соответствующим датчиком 41 расстояния в качестве сигналов BS1, BS2 заполнения и путем сравнения величин используется в вычислительным устройстве 62 для определения заполнения прессовальной камеры 18. Для определения заполнения или распределения убранной массы в прессовальной камере 18 могут использоваться устройства, известные специалистам из уровня техники. Так, например, для определения заполнения в прессе для формирования тюков могут быть обработаны данные известных определяемых приводных крутящих моментов одного или нескольких приводных валов или же данные отклонения копирных щупов, распределенных в подающем канале поперечно направлению движения.
В представленном положении начала работы в прессе 38 для формирования прямоугольных тюков в прессовальной камере 18 еще нет убранной массы. Устройство 20, 22 определения положения с помощью сканирующего луча 21 определяет середину валка 11, а следовательно, и задающую величину 28. Между средней зоной 31 области 26 регистрации (и серединой валка) имеется поперечное смещение 9, по существу равное половине ширины 13 валка. Вычислительное устройство 62 управляет поворотом управляемой оси 6. Если сельхозмашина 2 движется в направлении ВПЕРЕД, как показано на фиг.1, валок поступает через подборщик 12 на левую сторону пресса 3 для формирования тюков. Для формирования нового тюка вначале из активизированной характеристической кривой стратегии заполнения «пресс для формирования прямоугольных тюков» выбирают начальное смещение 9, равное показанной величине, в качестве характерного сигнала стратегии заполнения и суммируют его с сигналом LS1 или LS2 положения. Автоматическое устройство 10 управления поворотом выдерживает желаемое смещение 9. Теперь при заполнении прессовальной камеры 18 с левой стороны в ходе движения пресса 38 по полю 25 вдоль валка 11 это заполнение воспринимается датчиками 41 расстояния, и вычислительное устройство 62 уменьшает левостороннее смещение 9 на основе заполнения прессовальной камеры 18, полученного из сравнения величин сигналов BS1, BS2 заполнения, и продолжает этот процесс до достижения допустимого правостороннего смещения 9. Таким образом, изменение стороны инициируется сигналами BS1, BS2 заполнения, причем скорость изменения смещения слева направо может управляться в соответствии с характеристической кривой стратегии заполнения в зависимости от времени, пути и/или рабочих параметров. При этом изменение заполнения может также оказывать влияние на выбранную скорость изменения смещения.
Если желаемое смещение 9 изменяется из-за изменения линии валка, изменяется положение задающей величины 28 относительно средней зоны 31 и соответственно изменяется воспринимаемое смещение 9. Вычислительное устройство 62 передает на устройство 10 управления поворотом сигнал LKS управления поворотом таким образом, что смещение 9 корректируется, и вновь устанавливается желаемое смещение 9. Таким образом, устройство по изобретению автоматически реагирует на изменяющуюся линию валка на поле 25 и изменяющееся заполнение прессовальной камеры 18 через посредство устройства 10 управления поворотом.
Величина смещения 9 или параметры времени, пути или работы характеристической кривой стратегии заполнения могут быть введены вручную с помощью операторского терминала 27. Далее, для настройки устройства по изобретению или изучения характеристической кривой стратегии заполнения возможно проведение опытного прохода машины, известного как проход в режиме обучения. При этом водитель управляет сельхозмашиной 2 вручную, а получаемые от датчиков величины BS1, BS2, LS1, LS2, LKS, PS, время или путь и угол поворота записываются в запоминающем устройстве 65. Кроме того, при генерировании вычислительным устройством 62 сигнала стратегии заполнения, характерной для данного рабочего орудия, с учетом соответствующих рабочих параметров могут учитываться также такие предварительно заданные величины как изменение смещения на один тюк или на единицу времени или на длину валка. Эти предварительно заданные величины могут быть введены через операторский терминал 27 или определены в режиме обучения.
Возможен также вариант осуществления, в котором для нахождения оптимальной характеристической кривой стратегии заполнения производится корректировка сигнала стратегии заполнения, характерной для рабочего орудия, на основе оценки водителем трактора 1 результата с вводом этой оценки водителем в операторский терминал 27. При этом при формировании следующих тюков выполняется переход на улучшенную характеристическую кривую стратегии заполнения либо вычислительным устройством 62, либо имеющейся экспертной системой, - например, путем ввода оценки «тюки справа слишком малы». После этого правостороннее смещение 9 увеличивается, если подборщик 12 имеет достаточную ширину, или выбирается более высокая пороговая величина для инициации изменения смещения.
Согласно изобретению может быть предусмотрено, что трактор 1 направляется вдоль валка 11 автоматическим устройством 10 управления поворотом на основе сигнала LS1, LS2 положения. При этом дышло 7 управляется посредством исполнительного элемента 8 устройства 10 по сигналу стратегии заполнения, характерной для данного рабочего орудия, для перпендикулярного правостороннего или левостороннего смещения 9 прессовальной камеры 18 относительно валка 11. Поворотное дышло 7 в особенности применимо для того, чтобы компенсировать отклонение пресса 3 для формирования тюков при работе с движением вдоль косогора или при рабочем движении вдоль криволинейного участка. Эти процессы могут распознаваться соответствующими датчиками, а управление может осуществляться вычислительным устройством 62 или имеющейся системой 37 маршрутизации. В том случае, когда положение поступления валка 11 на подборщик 12 воспринимается дополнительными датчиками, желаемое поступление в прессовальную камеру 18 может точно регулироваться посредством поворота дышла 7 до достижения места поступления на подборщик 12, вычисленного с опережением по сигналам LS1, LS2 положения.
В рамках изобретения предусмотрено, что пресс 3 для формирования тюков может быть выполнен в виде рулонного пресса для формирования цилиндрических тюков. В таких прессах накопитель убранной массы в виде прессовальной камеры может быть образован несколькими расположенными рядом друг с другом ремнями или ведомыми цепями прутьями, которые совершают круговое движение и направляются множеством направляющих устройств. С помощью этих ремней или прутьев поданная в прессовальную камеру убранная масса формируется в цилиндрический тюк с уплотнением. При этом, например, на обоих крайних бесконечных ремнях расположено по щупу для определения натяжения соответствующего ремня. Натяжение каждого ремня зависит от степени заполнения прессовальной камеры в месте расположения ремня. Для каждого щупа предусмотрен датчик угла поворота, генерирующий сигнал заполнения в зависимости от степени заполнения в области соответствующего ремня.
Как показано на фиг.2, прицепное орудие 4 к трактору 1 может быть выполнено также в виде грузовой тележки 48. На передней стороне грузовой тележки 48 расположен подборщик 49, который подбирает лежащий на земле валок 50 и передает его на не показанное подробно транспортирующее устройство 51, транспортирующее убранную массу в кузов 52. Ширина подбираемого валка 50 меньше ширины 53 подборщика 49, которая примерно соответствует ширине 54 транспортирующего устройства 51 и ширине 55 кузова 52. Непосредственно перед подборщиком 49 грузовой тележки 49 расположено устройство 47 определения положения, состоящее из нескольких копирных щупов 56, симметрично распределенных по ширине 53 подборщика 49. Копирные щупы 56 воспринимают положение подбираемой убранной массы в приемной области подборщика 49. Отклонение каждого копирного щупа 56 определяется датчиком 57 угла поворота, которым снабжен копирный щуп, при этом датчики 57 угла поворота генерируют сигналы, зависящие от отклонения соответствующих копирных щупов. Из суммы всех сигналов вырабатывается по меньшей мере один сигнал LS3 положения, указывающий место наибольшей высоты валка 50.
В приемной области 58 кузова 52 расположены два двойных копирных щупа 59, расставленные по ширине 55 кузова и установленные на определенной высоте в области переднего борта. Эти копирные щупы 59 воспринимают заполнение кузова 52 над приемной областью 58. Отклонение каждого копирного щупа 59 определяется соответствующим датчиком 60 угла поворота. Заполнение кузова 52 убранной массой указывается вычислительному устройству 62 посредством сигналов BS3, BS4 заполнения, вырабатываемых датчиками 60 угла поворота. Кузов 52 оснащен донным скребковым конвейером 61, который транспортирует убранную массу от приемной области 58 в заднюю область грузовой тележки 48, когда приемная область 58 заполнена по всей ширине. Это обеспечивает равномерное заполнение грузовой тележки 48 по всей длине. Сигналы LS3 положения и сигналы BS3, BS4 заполнения передаются на вычислительное устройство 62.
В представленном примере выполнения устройство 20, 22 определения положения выполнено с возможностью дистанционного управления от вычислительного устройства 62 посредством исполнительного устройства 30 путем поворота вокруг по существу вертикальной оси 19 поворота. Если задающая величина 28 валка выходит из средней зоны 31 области 26 регистрации, исполнительное устройство 30 активизируется до тех пор, пока средняя зона 31 области 26 регистрации не придет в соответствие с задающей величиной 28. За счет этого слежения область 26 регистрации устройства 20, 22 определения положения постоянно перекрывает обе кромки валка, что дает более надежное распознавание ширины 13 валка. Кроме того, корректируются смещения области 26 регистрации в процессе выполняемых трактором 1 поворотов, что надежно устраняет риск потери валка 50 из области 26 регистрации. Действительное положение устройства 20, 22 определения положения воспринимается датчиком 32 угла поворота, и эта величина передается на вычислительное устройство в виде сигнала LS1 положения. Автоматическое следящее перемещение устройства 20, 22 определения положения вокруг оси 19 поворота может осуществляться также автоматически посредством управления этим устройством, которое подробно не описывается.
Для обеспечения возможности достижения смещения 9 в соответствии с изобретением вычислительное устройство 62 производит управление устройством 10 управления поворотом с помощью сигнала LKS управления поворотом до тех пор, пока сигнал LS1 положения не покажет желаемое смещение 9. Однако при этом требуется, чтобы в процессе изменения смещения не принималось во внимание движение устройства 20, 22 определения положения, так как при корректировке путем поворота устройство 20, 22 определения положения поворачивается вместе с трактором 1, и при этом распознаваемые положения валка 50 являются ложными и не дают сведений о линии валка 50 относительно подборщика 49. После завершения корректировки путем поворота проверяется вновь отрегулированное смещение 9 и при необходимости вновь выполняется поворот корректировки.
В альтернативном варианте может быть предусмотрено, что вычислительное устройство 62 на основе желаемого смещения 9 устанавливает новый угол поворота посредством исполнительного устройства 30 и затем вычислительное устройство производит управление устройством 10 управления поворотом таким образом, что задающая величина 28 вновь попадает в среднюю зону 31 области 26 регистрации. Регулировка смещения 9 производится всегда с учетом того, чтобы наружные кромки валка находились в пределах подборщика 49. При этом половина ширины 13 валка суммируется со смещением 9 перпендикулярно направлению ВПЕРЕД движения и сравнивается с половиной ширины 53 подборщика. Если кромка валка выходит за пределы ширины 53 подборщика, вычислительное устройство 62 не допускает увеличения смещения 9 или поворачивает устройство 20, 22 в обратном направлении на величину выхода кромки валка за подборщик. В особенности при наличии системы 37 маршрутизации при автоматическом ведении по колее могут учитываться также криволинейные участки линии валка 50.
Далее, может быть предусмотрено, что вычислительное устройство 62 на основе сигнала LS3 положения выполняет автоматическое управление поворотами трактора 1, а сигнал LS1 положения используется для опережающего планирования сигналов LKS управления поворотом и определения ширины валка или объема валка. Изменения линии валка и ширины 13 валка распознаются с опережением по времени и могут затем учитываться при генерировании сигнала стратегии заполнения, характерной для данного рабочего орудия. Таким образом, максимальное смещение 9, к которому стремится вычислительное устройство 62, адаптируется в режиме реального времени к действительным условиям работы для оптимальной загрузки рабочих орудий 4, 48.
Если отклонение копирного щупа 59 превышает определенную величину отклонения, вычислительным устройством 62 вводится и автоматически выполняется изменение направления смещения, - в данном случае слева направо. Во время этого изменения смещения валок 50 поступает в кузов 52 вначале слева, если смотреть по направлению ВПЕРЕД движения, затем посредине и в заключение слева. Как уже было описано на примере пресса для формирования цилиндрических тюков, скорость изменения смещения может регулироваться в зависимости от пройденного пути, времени или других рабочих параметров грузовой тележки 48 или валка 50. В данном примере выполнения вычислительным устройством 62 может дополнительно управляться донный скребковый конвейер 61 грузовой тележки 48. Так, например, если при введенной команде изменения смещения не происходит никакого изменения сигналов BS1, BS2 заполнения, это означает, что в приемной области 58 кузова 52 равномерно заполнена вся ширина 54 транспортирующего устройства. В этом случае донный скребковый конвейер 61 должен вначале переправить убранную массу в заднюю часть кузова 52, после чего может быть продолжено изменение смещения.
Возможен также вариант независимого управления донным скребковым конвейером 61 в корреляции с сигналами BS3, BS4 заполнения.
В рамках изобретения предусмотрено, что трактор 1 с прицепленной к нему грузовой тележкой 48 может быть оснащен навигационным устройством 34 и/или устройством 37 маршрутизации, которое воспринимает абсолютное положение грузовой тележки 48 на поле 25 или вырабатывает по меньшей мере один сигнал LS2 положения.
Фиг.3 изображает функциональную схему процесса в вычислительном устройстве 62 при управлении прессом 3 для формирования тюков по фиг.1. На первом функциональном шаге вычислительное устройство 62 включает «Пуск автоматической системы». Следующим является функциональный шаг 70 «Выбор стратегии». На этом шаге в зависимости от используемых рабочих орудий 3, 4, 48 выбирается заложенная в запоминающем устройстве характеристическая кривая стратегии заполнения для предстоящей загрузки этих орудий убранной массой. Эта характеристическая кривая стратегии заполнения содержит величины изменения смещения, необходимые для оптимального заполнения рабочих орудий 3, 4, 48, и соответственно является различной для каждого из них. Само изменение смещения в данном случае на примере пресса для формирования тюков предусмотрено таким образом, что максимальное смещение 9 в соответствии с шириной 13 валка и шириной 16 прессовального канала определяет характеристическую кривую стратегии заполнения, а затем активизация изменения смещения производится на основе определенной разницы сигналов заполнения. При этом величина смещения 9 регулируется на основе характеристической кривой стратегии заполнения в зависимости от времени, пути или расхода потока убранной массы. В прессе 3 для формирования тюков величина смещения выбирается линейной в соответствии с сигналами LS1, LS2, LS3 положения, при этом вначале максимальное левостороннее смещение 9 уменьшается до нуля, а затем увеличивается в правую сторону до достижения максимального правостороннего смещения 9. Для грузовой тележки 48 выбирается, например, характеристическая кривая стратегии заполнения, которая предусматривает изменение смещения 9 по сигналам LS1, LS2, LS3 положения с выдержкой времени.
На следующем шаге 71 «Выбор стороны» выбирается правая или левая сторона смещения 9. Этот выбор может осуществляться автоматически или вручную через операторский терминал 27. Далее, в процессе подбора сельхозмашиной 2 валка 11, 50 с поля 25 накопитель убранной массы, в данном примере прессовальная камера 18, по меньшей мере более интенсивно заполняется убранной массой на выбранной стороне. На основе сигналов BS1, BS2 заполнения на следующем функциональном шаге 72 «Нагрузка» вычислительным устройством 62 определяется нагрузка на шатуны 39. Когда величина нагрузки превышает пороговую величину, на следующем функциональном шаге 74 «Обвязка» запрашивается статус обвязки. Если величина нагрузки еще не достигнута, загрузка пресса 3 для формирования тюков проводится дальше с установленной величиной смещения 9, а следующий шаг 73 «Изменение стороны» пропускается. На следующем функциональном шаге 74 «Обвязка», как уже было упомянуто, запрашивается статус обвязки. Если обвязка выполнена, на следующем функциональном шаге 75 «Автоматическая система включена» запрашивается статус автоматической системы. Если обвязка не выполнена, система возвращается к функциональному шагу 72 «Нагрузка», на котором вновь запрашивается нагрузка шатунов 39.
Если в ходе работы пресса 3 для формирования тюков автоматическую систему выключают, это побуждает вычислительное устройство 62 на функциональном шаге 75 «Автоматическая система действует» перейти к шагу 76 «Конец». При этом вычислительное устройство 62 прекращает генерирование сигналов LKS управления поворотом для передачи на устройство 10 управления поворотом. При действующей автоматической системе на функциональном шаге «75» после того, как вычислительное устройство 62 распознает выполнение обвязки, оно возвращает систему к функциональному шагу 71 «Выбор стороны». За счет этого после формирования каждого тюка выполнение обвязки вызывает переход вычислительного устройства 62 к выбору стороны желаемого смещения 9. Таким образом, заполнение убранной массой для каждого нового тюка всегда выполняется точно в соответствии со стратегией заполнения предыдущего тюка.
Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации, не выходящие за пределы объема защиты, а также использование его в других машинах для получения описанных преимуществ.
Реферат
Изобретение относится к сельскому хозяйству. Устройство для равномерной загрузки сельхозмашины содержит по меньшей мере одно вычислительное устройство, которое вырабатывает для устройства управления поворота сигнал управления поворотом по меньшей мере из одного первого сигнала положения и по меньшей мере одного дополнительного сигнала стратегии заполнения рабочего орудия. Во время приема валка убранной массы с поля в накопитель убранной массы осуществляется автоматическое ведение по колее посредством автоматического устройства управления поворотом. В результате достигается формирование равномерно уплотненных тюков убранной массы или оптимальное использование грузоподъемности грузовой тележки с одновременным освобождением водителя трактора от этих задач. 13 з.п. ф-лы, 3 ил.
Комментарии