Система планирования разработки поля, способ планирования разработки поля и сельскохозяйственная рабочая машина с такой системой планирования - RU2701892C2
Код документа: RU2701892C2
Чертежи
Описание
Область техники
Предлагаемое изобретение относится к системе планирования разработки поля для сельскохозяйственной рабочей машины, а также к способу планирования разработки поля для сельскохозяйственной рабочей машины.
Уровень техники
Учитывая постоянное повышение производительности сельскохозяйственных рабочих машин, растет значение планирования и организации рабочего процесса для мощных рабочих машин, например, зерноуборочных комбайнов, кормоуборочных комбайнов или других сельскохозяйственных машин, в частности, распределителей удобрений или сеялок. При планировании рабочего процесса сельскохозяйственной рабочей машины на поле увеличивается важность планирования маршрута обработки, в соответствии с которым сельскохозяйственная рабочая машина движется по полю, так как, например, соответствующий выбор маршрута позволяет определить кратчайший путь обработки поля в целом и, тем самым, сэкономить время и топливо. Планирование выгодных маршрутов обработки подразумевает, в том числе, планирование соответствующих поворотных полос, на которых сельскохозяйственная рабочая машина может изменить направление своего движения и, например, продолжить обработку поля параллельно предыдущему направлению движения.
В патентной заявке WO 2009/117014 раскрыта система и способ планирования маршрутов при помощи внутренней границы обработки поля. При этом после установления внешней границы поля определяют желательное расстояние между внешней границей поля и внутренней границей поля. Первичный опорный участок пути, проходящий под углом к внешней границе поля, автоматически определяется для поля модулем опорного участка пути, после чего на поле прокладывают несколько вторичных опорных участков пути, ориентированных, по существу, параллельно первичному участку пути. Вдоль опорных участков пути, в соответствии с предустановленным расстоянием до внешней границы поля, формируют граничные точки, соединив которые, можно получить внутреннюю границу поля в виде поворотной полосы. Хотя при этом имеется возможность автоматического определения внутренней границы поля, например, в виде поворотной полосы, система не позволяет оператору создавать опорные данные на основании различных специфичных для поля данных, которые впоследствии можно было бы использовать в качестве исходной информации для планирования различных задач.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является разработка системы планирования и способа планирования для сельскохозяйственной рабочей машины, которая сделает возможным упрощенное формирование исходной информации для последующего планирования обработки поля на основании специфичных для поля данных, чтобы, например, оператору было проще спланировать обработку поля путем выбора значимой исходной информации.
Согласно изобретению, задача решена отличительными признаками независимых пунктов 1 и 9 формулы изобретения. Выгодные варианты осуществления изобретения раскрыты в зависимых пунктах формулы и в последующем описании.
Описываемая изобретением система планирования, предназначенная для, в частности, интерактивного планирования обработки поля для сельскохозяйственной рабочей машины, содержит, помимо устройства индикации, процессор, предназначенный для обработки специфичных для поля данных. Согласно изобретению, система планирования настроена и сконструирована с возможностью формирования специфичных для поля данных и/или импортирования предварительно заданных специфичных для поля данных в процессор, определения на основании специфичных для поля данных в соответствии с заложенным в процессор алгоритмом, по меньшей мере, одного опорного объекта, отображения, по меньшей мере, одного опорного объекта на устройстве индикации, причем обеспечена возможность выбора по меньшей мере одного опорного объекта пользователем системы планирования в качестве исходной информации для планирования обработки поля, и составления, на основании по меньшей мере одного выбранного опорного объекта, плана обработки для сельскохозяйственной рабочей машины.
Система планирования содержит, помимо устройства индикации, процессор, который на основании специфичных для поля данных и в соответствии с заложенным алгоритмом может определять один или несколько опорных объектов. Опорные объекты могут отображаться на устройстве индикации и, тем самым, позволяют оператору (например, сельскохозяйственной рабочей машины) выбрать среди отображенных опорных объектов те объекты, которые подходят для дальнейшего планирования работ на соответствующем поле. При этом выбранный опорный объект служит исходной информацией для составления плана обработки соответствующего поля сельскохозяйственной рабочей машиной.
Выбор оператором системы планирования опорных объектов в качестве исходной информации выгоден тем, что оператор может определять, какие опорные объекты и, тем самым, какая исходная информация важна и должна быть учтена при последующем планировании обработки. Благодаря этому можно обойтись без дополнительного затратного автоматического анализа специфичных для поля данных и/или опорных объектов. Кроме того, могут быть учтены знания и опыт оператора, в частности, в отношении обрабатываемого поля. Таким образом, интерактивный выбор специфичных для поля опорных объектов в качестве исходной информации позволяет упростить составление плана обработки для сельскохозяйственной рабочей машины.
В предпочтительном варианте осуществления изобретения специфичные для поля данные содержат информацию, относящуюся к обрамлению поля, внешним и/или внутренним границам поля и/или географическим особенностям, в частности, особенностям поля. При помощи информации, относящейся к обрамлению поля, внешним и/или внутренним границам поля и/или географическим особенностям и содержащейся в специфичных для поля данных, можно дополнительно упростить составление плана обработки, так как в результате информацию, необходимую для определения опорного объекта, можно будет использовать без дополнительной подготовки данных.
В особенно предпочтительном варианте осуществления изобретения алгоритм определения опорного объекта на основании специфичных для поля данных представляет собой алгоритм распознавания кромок. Алгоритм, в частности, алгоритм распознавания кромок, может быть заложен в процессор. Специфичные для поля данные могут быть подготовлены перед определением опорных объектов с помощью алгоритма распознавания кромок, чтобы сделать возможным графическое отображение, в частности, в форме линии, и, тем самым, упростить определение опорных объектов. Опорные объекты, найденные с помощью алгоритма распознавания кромок, можно представить, например, в форме линий и/или площадей, например, путем индикации контуров. Алгоритм распознавания кромок позволяет использовать простое графическое отображение поля, в результате чего можно обойтись без затратной подготовки данных для определения опорных объектов, так как для составления плана обработки можно использовать, например, в том числе, оцифрованные карты или чертежи, например, кадастровые карты соответствующего поля.
В особенно предпочтительном варианте осуществления изобретения опорный объект представляет собой опорную кромку и/или угловую точку, причем опорная кромка может быть ограничена двумя угловыми точками. Опорная кромка может представлять собой участок и/или фрагмент опорного объекта, например, участок обрамления поля, внешней или внутренней границы поля. При этом опорная кромка может проходить между двумя угловыми точками и может быть ограничена ими. Это выгодно тем, что позволяет определить и, в частности, отобразить определенный участок и/или фрагмент опорного объекта. Определение опорной кромки позволяет более точно выбрать и определить исходные данные для составления плана обработки и, тем самым, повысить точность плана обработки.
Выгодным образом, опорный объект можно отобразить на устройстве индикации на основании автоматического предварительного выбора. Отображенные на устройстве индикации опорные объекты, в частности, опорные кромки, можно предварительно выбирать на основании предварительно определенных настроек, причем может отображаться, по меньшей мере, часть опорных объектов, определенных на основании специфичных для поля данных. Предварительный выбор отображенных опорных объектов, в частности, опорных кромок, выгоден тем, что отображаются, например, только те опорные объекты, которые в принципе можно использовать в качестве исходной информации. Кроме того, за счет предварительного выбора отображенных опорных объектов можно снизить нагрузку на оператора, так как предварительный выбор опорных объектов позволяет уменьшить количество вариантов, доступных оператору.
В следующем предпочтительном варианте осуществления изобретения на основании, по меньшей мере, одного опорного объекта, выбранного в качестве исходной информации, можно определить опорные линии, необходимые для планирования маршрутов обработки, участков поля и/или поворотных полос. Опорный объект может быть представлен в форме линии, например, опорной кромки, или плоскости. Плоский опорный объект можно сформировать, например, путем выбора и соединения нескольких угловых точек. На основании линейного опорного объекта, в частности, опорной кромки, выбранной в качестве исходной информации для планирования обработки, можно определить относящуюся к этому опорному объекту опорную линию, которая может служить основой для планирования маршрута обработки. При этом маршрут обработки для поля представляет собой весь маршрут, который должна пройти машина для обработки поля, причем маршрут обработки может содержать несколько колей, например, проходящих по полю, по существу, параллельно. Кроме того, путем выбора плоского опорного объекта в качестве исходной информации для планирования обработки можно образовать части поля и/или поворотные полосы, которые будут учитываться при планировании обработки. Путем создания различных участков плана, например, маршрутов обработки, частей поля и/или поворотных полос на основании выбора соответствующего опорного объекта оператором можно дополнительно упростить составление плана обработки.
Выгодным образом, опорные объекты могут отображаться на устройстве индикации в интерактивном режиме, причем устройство индикации представляет собой, в частности, сенсорный дисплей. Интерактивное представление, в частности, на устройстве индикации, выполненном в виде сенсорного дисплея, позволяет выбирать отображенный опорный объект непосредственно на устройстве индикации, благодаря чему можно дополнительно упростить составление плана обработки.
Кроме того, изобретение относится к сельскохозяйственной рабочей машине с системой планирования, описанной выше и рассчитанной на планирование обработки поля. Сельскохозяйственная рабочая машина может содержать систему планирования маршрута, которая может содержать описываемую изобретением систему планирования и/или осуществлять описываемый изобретением способ планирования.
Кроме того, изобретение относится к способу, в частности, интерактивного планирования обработки поля для сельскохозяйственной рабочей машины, причем способ предусматривает формирование специфичных для поля данных и/или импорт предварительно заданных специфичных для поля данных и их ввод в процессор, определение на основании специфичных для поля данных в соответствии с заложенным в процессор алгоритмом, по меньшей мере, одного опорного объекта, отображение, по меньшей мере, одного опорного объекта на устройстве индикации, выбор пользователем системы планирования, по меньшей мере, одного опорного объекта в качестве исходной информации для планирования обработки поля и составление плана обработки для сельскохозяйственной рабочей машины на основании, по меньшей мере, одного выбранного опорного объекта.
Способ позволяет отображать опорные объекты, определенные на основании специфичных для поля данных. Таким образом, оператор может осмысленно выбирать из отображенных опорных объектов те объекты, которые нужны для дальнейшего планирования работ на соответствующем поле. Выбранный опорный объект или выбранные опорные объекты служат исходной информацией для составления плана обработки соответствующего поля сельскохозяйственной рабочей машиной. Интерактивное взаимное реагирование оператора и системы планирования, в частности, выбор опорных объектов в качестве исходной информации пользователем системы планирования, выгоден тем, что пользователь может определить, какие опорные объекты и, тем самым, какая исходная информация важна и должна учитываться при дальнейшем планировании обработки. Благодаря этому можно обойтись без дополнительного затратного автоматического анализа специфичных для поля данных и/или опорных объектов. Кроме того, могут быть учтены знания и опыт оператора, в частности, в отношении обрабатываемого поля. Таким образом, интерактивный выбор специфичных для поля опорных объектов в качестве исходной информации позволяет упростить составление плана обработки для сельскохозяйственной рабочей машины.
В предпочтительном варианте способа, по меньшей мере, один опорный объект определяют при помощи алгоритма распознавания кромок, причем в качестве опорного объекта можно создавать опорную кромку, в частности, ограниченную двумя угловыми точками. Опорная кромка может соединять несколько угловых точек или проходить через них, причем форму опорной кромки можно определять при помощи расположения граничных и промежуточных угловых точек. Алгоритм распознавания кромок позволяет использовать простые графические изображения поля, в результате чего можно обойтись без затратной подготовки данных для определения опорных объектов. Создание опорной кромки, которая соединяет две угловые точки и может быть ограничена ими, выгодно тем, что оно позволяет выделить и, в частности, отобразить определенный участок и/или фрагмент опорного объекта, что дает возможность более точного выбора и определения исходных данных для составления плана обработки.
В следующем варианте осуществления отображение опорного объекта на устройстве индикации основано на автоматизированном предварительном выборе. Благодаря тому, что из полученных опорных объектов предварительно отбираются те, которые будут отображаться, можно, например, показывать только опорные объекты, которые могут быть использованы в качестве исходной информации для составления плана обработки. Это позволяет дополнительно снизить нагрузку на оператора.
Предпочтительно, предварительный выбор опорного объекта основывается на соблюдении, по меньшей мере, одного критерия предварительного выбора, причем критерием предварительного выбора может быть длина и/или кривизна опорного объекта. Критерии предварительного выбора особенно хорошо подходят для анализа опорных объектов, например, опорной кромки, полученной методом распознавания кромок. При этом можно особенно эффективно использовать длину и/или кривизну опорного объекта (например, в форме опорной кромки), полученного с помощью алгоритма распознавания кромок. В результате можно осуществить достоверный предварительный выбор отображаемых опорных объектов, которые можно использовать для составления плана обработки.
Следующий особенно предпочтительный вариант способа предусматривает формирование на основе, по меньшей мере, одного выбранного опорного объекта опорных линий, частей поля и/или поворотных полос, служащих исходной информацией для составления плана обработки. Опорный объект может быть представлен в форме линии, например, опорной кромки, или плоскости, причем плоский опорный объект (опорная плоскость), может быть образован, например, путем выбора и соединения нескольких угловых точек. Опорные объекты, в зависимости от своей формы и/или расположения, можно выбирать для планирования различных участков плана, например, в качестве опорной линии или поворотной полосы, причем составление плана обработки может быть основано, по меньшей мере, на одном участке плана. Это выгодно тем, что выбор соответствующего опорного объекта и, в частности, связанного с ним участка плана позволяет дополнительно упростить составление плана обработки.
В следующем предпочтительном варианте способа составление плана обработки для сельскохозяйственной рабочей машины включает формирование информации для управления, по меньшей мере, одним навесным агрегатом сельскохозяйственной машины. Благодаря тому, что план обработки для сельскохозяйственной рабочей машины содержит информацию по управлению навесными агрегатами рабочей машины, можно использовать для планирования дополнительную информацию по обработке и, тем самым, повысить функциональность и расширить область применения плана обработки. Это выгодно тем, что составление планов обработки можно будет использовать для большего количества сельскохозяйственных рабочих машин.
Краткое описание чертежей
Прочие признаки и преимущества изобретения следуют из приведенного ниже описания вариантов осуществления с учетом прилагаемых фигур, на которых изображено:
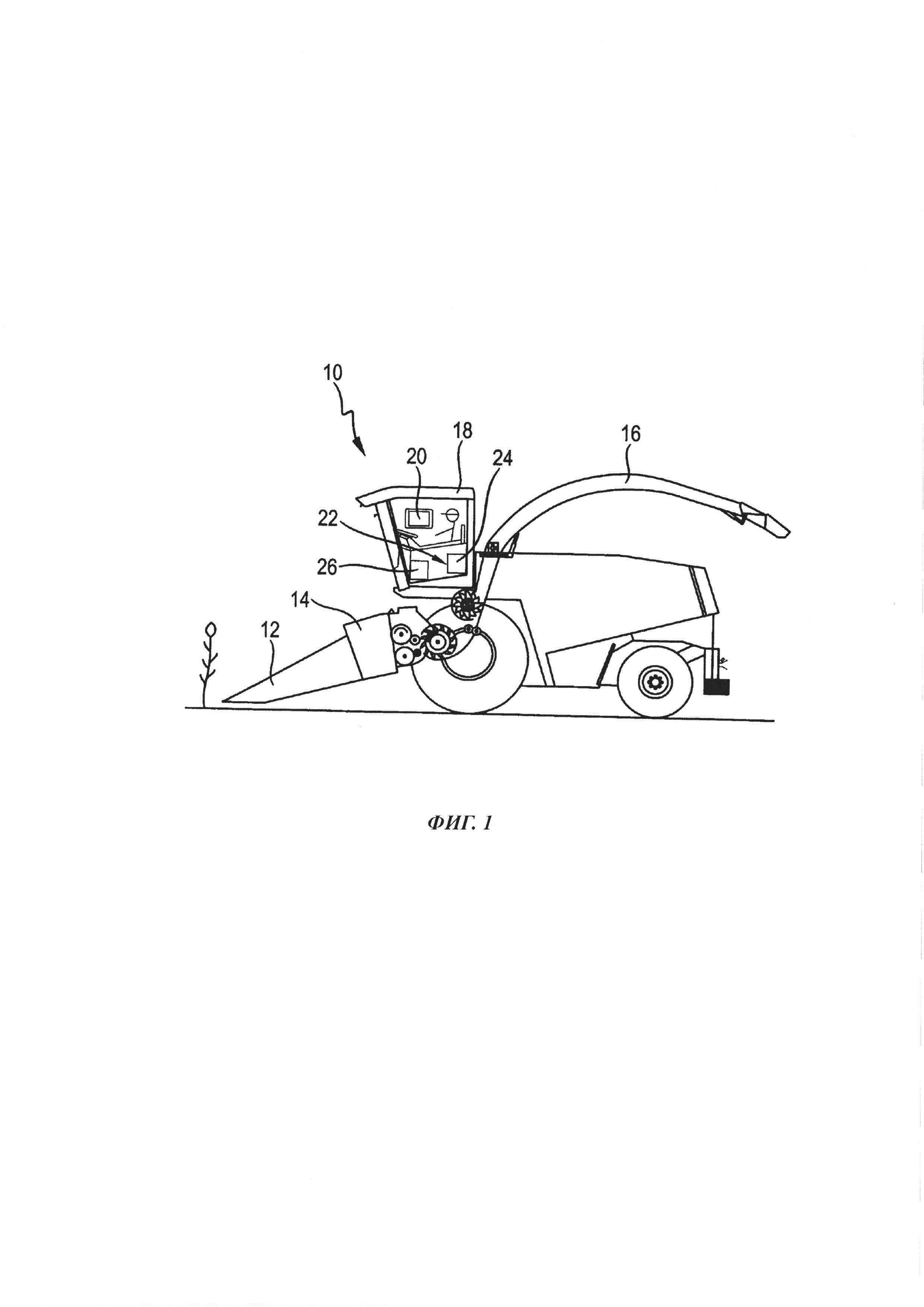
Фигура 1: схематичное изображение сельскохозяйственной рабочей машины.
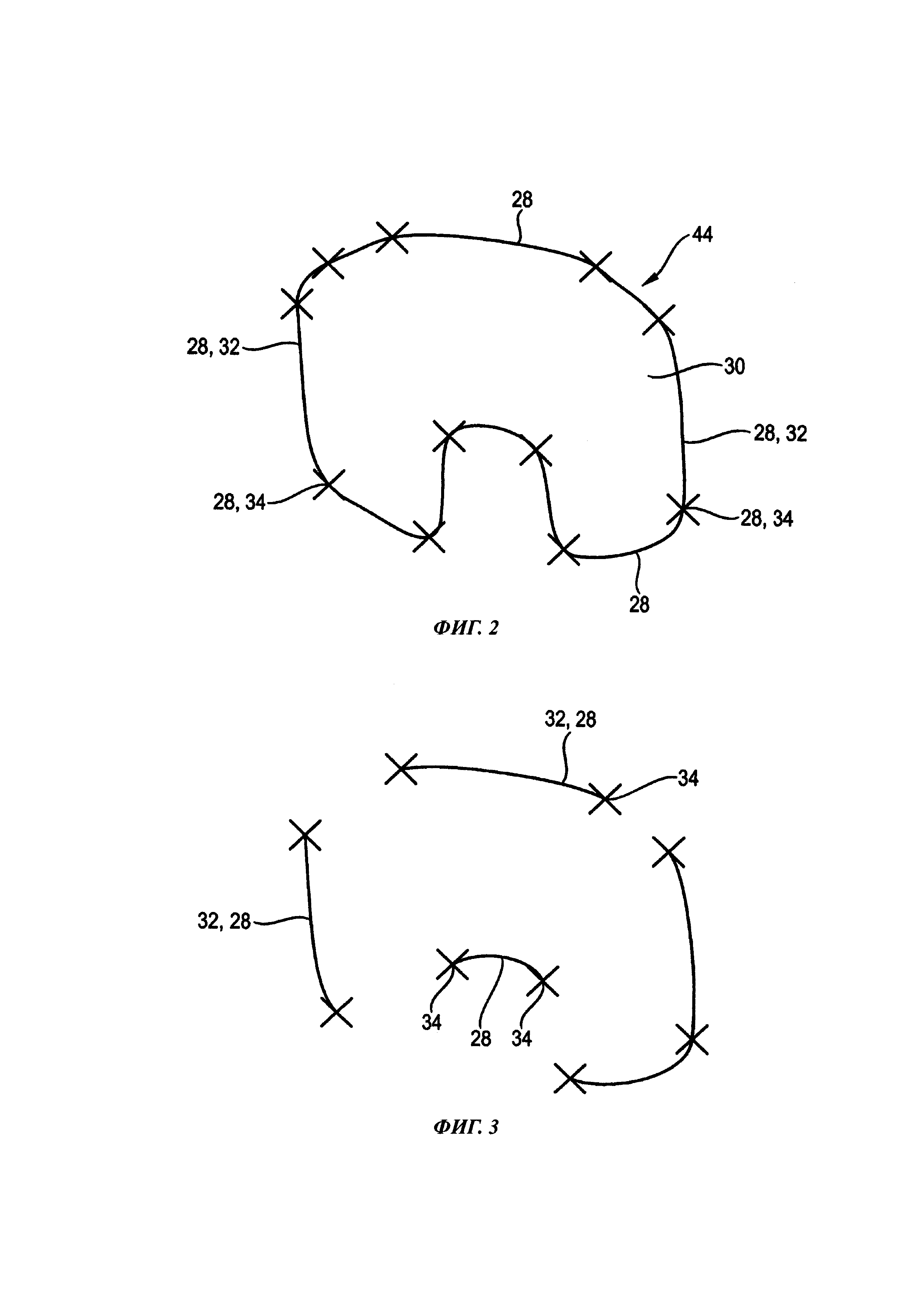
Фигура 2: схематичное изображение опорных объектов поля.
Фигура 3: схематичное изображение индикации предварительно выбранных опорных объектов.
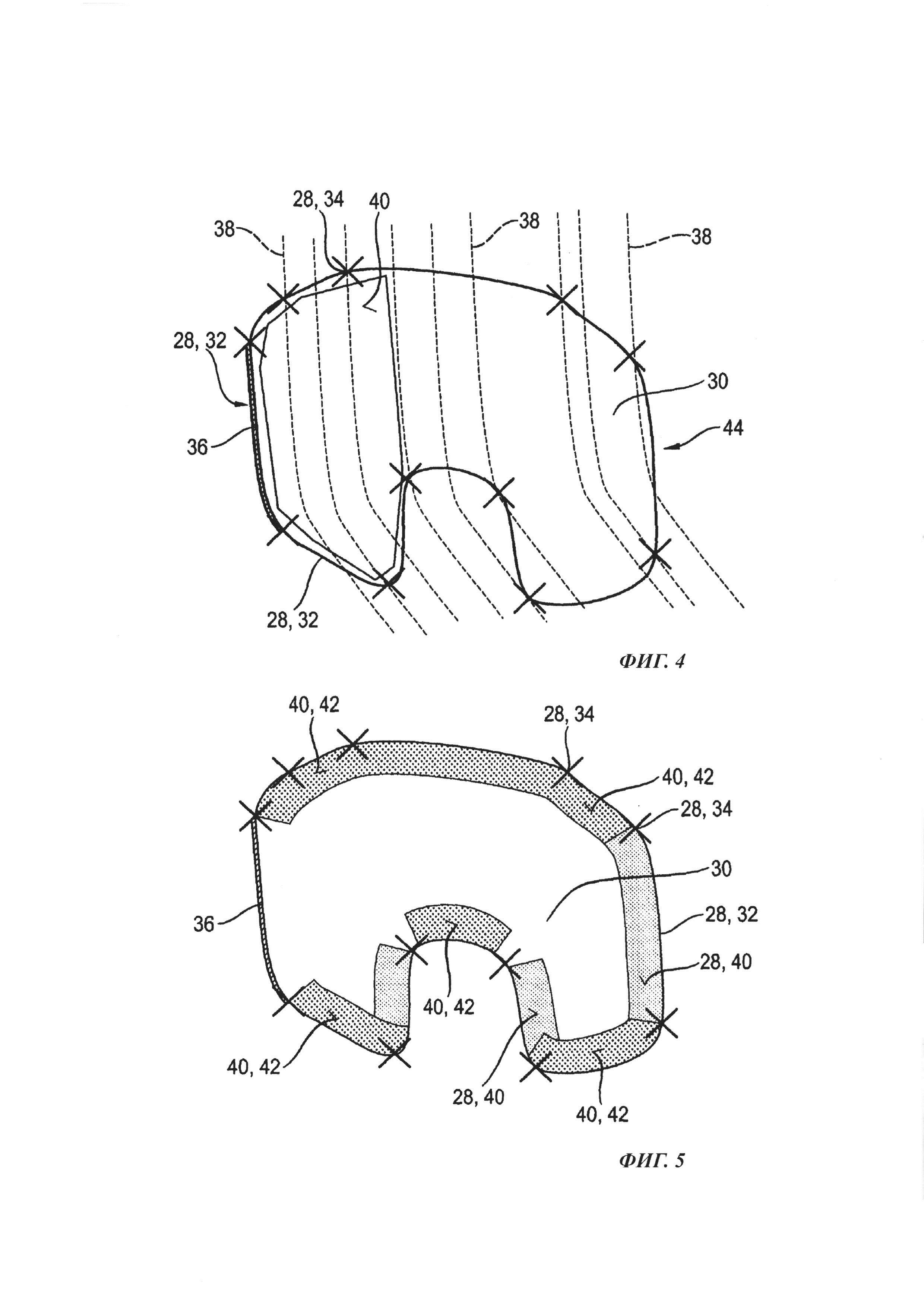
Фигура 4: схематичное изображение колей движения и части поля в соответствии с выбранным опорным объектом.
Фигура 5: схематичное изображение поворотных полос, сформированных на основании выбранной опорной линии.
Осуществление изобретения
На фигуре 1 в качестве примера сельскохозяйственной рабочей машины 10 изображен кормоуборочный комбайн. Изображенный кормоуборочный комбайн, по существу, известен специалистам, поэтому в настоящее описание можно не включать информацию о его стандартных узлах, например, навесном агрегате 12, втягивающем агрегате 14, измельчителе и перегрузочном колене 16. Сельскохозяйственной рабочей машиной 10 в смысле изобретения может быть любая рабочая машина, которую можно использовать для обработки поля, например, зерноуборочный комбайн или трактор с навесными агрегатами или без них. Сельскохозяйственная рабочая машина 10 может обрабатывать поле на основании плана обработки, причем план обработки может содержать проезжаемый маршрут обработки и/или выполняемые работы, в частности, внесение определенного количества удобрений в зависимости от положения.
Для контроля и/или управления различными функциями сельскохозяйственной рабочей машины 10 в кабине 18 оператора сельскохозяйственной рабочей машины 10 расположено устройство 20 индикации. На устройстве 20 индикации для оператора сельскохозяйственной рабочей машины 10 может отображаться план обработки. План обработки для сельскохозяйственной рабочей машины 10, специфичный для конкретного поля, может быть составлен в системе 22 планирования с процессором 24 и/или записан в нее, причем система 22 планирования с процессором 24 может быть установлена на сельскохозяйственную рабочую машину 10. Система 22 планирования с процессором 24 может быть также расположена на удалении от сельскохозяйственной рабочей машины 10, например, в офисе, причем план обработки можно передавать на сельскохозяйственную рабочую машину 10 посредством коммуникационного модуля 26, например, через сеть мобильной связи или WLAN-соединение. Система 22 планирования, процессор 24 и/или коммуникационный модуль 26 могут быть интегрированы в устройство 20 индикации. Устройство 20 индикации может содержать сенсорный дисплей, предназначенный для отображения и ввода информации. Устройство 20 индикации с сенсорным дисплеем позволяет не только отображать информацию, но и взаимодействовать с отображенной информацией, например, для составления или редактирования плана обработки.
Система 22 планирования, в частности, система 22 планирования, установленная на сельскохозяйственной рабочей машине 10, может также содержать дополнительные компоненты, полезные для составления плана обработки. Это могут быть, например, датчики для регистрации и/или составления специфичных для поля данных, например, устройство определения положения в форме GPS-приемника. Специфичные для поля данные могут представлять собой, например, данные, содержащие информацию об объеме, внешних и/или внутренних границах поля или географических особенностях обрабатываемого поля. При этом под географическими особенностями поля могут пониматься препятствия или предписанные колеи движения, например, при использовании так называемого контролируемого движения техники по полю (англ.: Controlled Traffic Farming), которые нужно учитывать при составлении плана обработки.
Эти специфичные для поля данные, предназначенные для составления плана обработки, могут быть уже известны, то есть, предварительно заданы, или должны создаваться перед составлением плана обработки. Предварительно заданные данные могут быть заложены в систему планирования, например, в память, или импортированы / введены в систему 22 планирования. Создание специфичных для поля данных можно осуществить, например, путем прохождения вдоль внешних и/или внутренних границ поля. При этом специфичные для поля данные могут иметься или быть составлены в графическом виде, например, в виде графического файла или карты, и/или в виде географических координат. Чтобы можно было определить, по меньшей мере, один опорный объект на основании специфичных для поля данных при помощи алгоритма, описываемого изобретением, данные можно подготовить в форме, пригодной для применения алгоритма, например, путем визуализации в виде линейного и/или плоскостного представления специфичных для поля данных.
Согласно изобретению, специфичные для поля данные можно обрабатывать при помощи алгоритма, заложенного в процессор 24. Предпочтительно, алгоритм представляет собой алгоритм распознавания кромок, позволяющий на основании специфичных для поля данных определить опорные объекты 28, которые могут быть использованы в качестве исходной информации для составления плана обработки.
На фигуре 2 в графическом виде изображено обрамление 44 поля 30, для которого нужно составить план обработки сельскохозяйственной рабочей машиной 10. На основании специфичных для поля данных, представленных в графическом виде, в данном случае, обрамления 44 поля, то есть, внешних границ поля, при помощи алгоритма распознавания кромок были получены опорные объекты 28 для обрабатываемого поля 30. При этом опорные объекты 28 могут представлять собой линейные опорные кромки 32 и/или угловые точки 34 на распознанном обрамлении 44 поля. Кроме того, опорный объект 28 может иметь форму плоскости. При этом опорная кромка 32 может быть ограничена двумя угловыми точками 34. При этом опорный объект 28, в частности, опорная кромка 32, может представлять собой часть специфичных для поля данных, в частности, обрамления 44 поля.
Полученные опорные объекты 28 могут быть выведены на устройство 20 индикации, чтобы пользователь системы планирования мог выбрать, по меньшей мере, один опорный объект 28 в качестве исходной информации для составления плана обработки. На основании полученных и, по меньшей мере, одного выбранного опорного объекта 28 можно создавать различную исходную информацию для составления плана обработки.
Опорные объекты 28, полученные на основании специфичных для поля данных, можно отображать на устройстве 20 индикации на основании автоматического предварительного выбора. Предварительный выбор отображаемых опорных объектов 28 позволяет отображать, например, только те опорные объекты 28, которые могут быть использованы для последующего составления плана обработки. Кроме того, отображение предварительно выбранных опорных объектов 28 позволяет снизить нагрузку на пользователя системы планирования, так как пользователю больше не нужно делать выбор среди всех полученных опорных объектов 28. Отображение опорных объектов 28 на устройстве 20 индикации, основанное на предварительном выборе, представлено на фигуре 3. При этом отображаются не все опорные объекты 28, полученные на основании специфичных для поля данных, в данном случае, обрамления 44 поля, но сокращенное количество опорных объектов 28, в частности, опорные кромки 32 и соответствующие угловые точки 34.
Предварительный выбор показанных на фигуре 3 опорных объектов 28 может быть основан на критериях предварительного выбора, причем критерии предварительного выбора могут быть постоянными или редактируемыми. В результате пользователь системы планирования, например, при составлении плана обработки для нового поля 30, может адаптировать критерии предварительного выбора для нового поля 30 и сохранить их, то есть, эти критерии предварительного выбора могут быть заданы для последующего составления плана обработки для того же поля 30. Критерием выбора для отображения опорного объекта 28, в частности, опорной кромки 32, могут быть, например, размеры, в частности, длина или площадь полученного опорного объекта. Кроме того, в качестве критерия предварительного выбора можно использовать кривизну опорного объекта 28, в частности, по меньшей мере, одной кромки одного опорного объекта 28. Кроме того, в качестве критерия предварительного выбора можно указать, что полученный опорный объект 28 должен быть расположен относительно соединяющей две соседние угловые точки 34 прямой внутри определенного угла раскрытия. Благодаря этому предварительно выбранный опорный объект 28, например, при угле раскрытия менее 35° по обеим сторонам соединительных прямых, будет иметь скорее вытянутую форму. Для предварительного выбора можно задать предельные значения и/или диапазоны, в которые должны укладываться опорные объекты 28, чтобы их можно было использовать для составления плана обработки в качестве исходной информации и отображать для выбора.
На основании полученных и, по меньшей мере, одного выбранного опорного объекта 28 можно создавать различную исходную информацию для составления плана обработки. На фигуре 4 представлены опорные объекты 28 для поля 30, полученные на основании специфичных для поля данных. Опорный объект 28 в форме опорной кромки 32 выбран в качестве опорной линии 36, например, пользователем, причем опорная линия 36 служит исходной информацией для последующего планирования обработки и составления плана обработки. На основании опорной линии 36 система 22 планирования создает и отображает колеи 38 движения. Колеи 38 движения расположены, по существу, параллельно выбранной опорной линии 36, в частности, распределены по полю 30. Созданные колеи 38 движения служат для составления маршрута обработки для обрабатываемого поля 30. При этом можно учитывать дополнительную информацию, например, специфичные для машины данные, например, данные о навесных агрегатах или рабочей ширине. Колеи 38 движения представлены в виде линий, расположенных, по существу, параллельно опорной линии 36 и пересекающих обрамление 44 поля. Кроме того, на фигуре 4 изображен опорный объект 28 в форме опорной плоскости 40. Эта опорная плоскость 40 представляет собой часть поля 30. Эта опорная плоскость 40 может создаваться и предлагаться автоматически системой 22 планирования, например, на основании критериев предварительного выбора, или создаваться пользователем. Благодаря этому пользователь может осмысленно разделить поле 30 для обработки, в частности, при помощи отдельных и/или комбинированных планов обработки.
На фигуре 5 изображены дополнительные опорные плоскости 40, созданные и отображенные системой планирования и основанные на выборе опорного объекта 28 в качестве опорной линии 36. Опорные плоскости 40 предлагают пользователю на выбор области, которые могут быть использованы в качестве поворотных полос 42 при выборе опорного объекта 28 (см. фиг. 3) в качестве опорной линии 36. При этом опорные плоскости 40, предпочтительные для использования в качестве поворотных полос 42, могут быть выделены особо, например, более темным цветом. Пользователь может выбрать из отображенных опорных плоскостей 40 те плоскости, которые следует использовать в качестве поворотных полос 42. При этом опорные плоскости 40, выбранные в качестве поворотных полос 42, используются системой 22 планирования в качестве исходной информации для составления плана обработки, причем на поворотных полосах сельскохозяйственная рабочая машина может, например, разворачиваться, чтобы заехать в противоположном направлении в ближайшую предусмотренную колею 38 движения и продолжить обработку поля 30. Выбранные пользователем поворотные полосы 42 можно использовать, например, в качестве исходной информации для автоматизированного управления разворотом сельскохозяйственной рабочей машины 10 в рамках плана обработки. Кроме того, составление плана обработки для сельскохозяйственной рабочей машины 10 на основании выбранных пользователем опорных объектов 28 может подразумевать формирование информации для управления навесными агрегатами сельскохозяйственной рабочей машины 10. Речь может идти, например, об информации для управления сельскохозяйственной рабочей машиной 10 и/или для управления навесными агрегатами сельскохозяйственной рабочей машины 10, в частности, разбрасывателем удобрений.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 сельскохозяйственная рабочая машина
12 навесной агрегат
14 втягивающий агрегат
16 перегрузочное колено
18 кабина оператора
20 устройство индикации
22 система планирования
24 процессор
26 коммуникационный модуль
28 опорный объект
30 поле
32 опорная кромка
34 угловые точки
36 опорная линия
38 колея движения
40 опорная плоскость
42 поворотная полоса
44 обрамление поля.
Реферат
Группа изобретений относится к системе и способу интерактивного планирования обработки поля для сельскохозяйственной рабочей машины, а также к сельскохозяйственной рабочей машине. Система, осуществляющая способ, содержит устройство индикации и процессор. Согласно изобретению система планирования настроена и сконструирована с возможностью формирования специфичных для поля данных и/или импортирования предварительно заданных специфичных для поля данных в процессор, определения на основании специфичных для поля данных в соответствии с заложенным в процессор алгоритмом по меньшей мере одного опорного объекта и отображения, по меньшей мере одного опорного объекта на устройстве индикации. Кроме того, обеспечена возможность выбора по меньшей мере одного опорного объекта пользователем системы планирования в качестве исходной информации для планирования обработки поля и составления, на основании по меньшей мере одного выбранного опорного объекта, плана обработки для сельскохозяйственной рабочей машины. Обеспечивается упрощение формирования исходной информации для составления плана обработки поля на основании данных, специфичных для поля. 3 н. и 9 з.п. ф-лы. 5 ил.
Комментарии