Способ управления пресс-подборщиком и пресс-подборщик - RU2365087C1
Код документа: RU2365087C1
Чертежи

Описание
Настоящее изобретение относится к способу управления пресс-подборщиком при подборке рядка скошенной сельскохозяйственной культуры, содержащим подбирающее устройство, которое подбирает сельскохозяйственную культуру, устройство прессования, которое подвергает подобранную сельскохозяйственную культуру сжатию в направлении прессования для формирования тюка и которое содержит средство измерения распределения степени загрузки перпендикулярно к направлению прессования.
Настоящее изобретение, кроме того, относится к пресс-подборщику, содержащему подбирающее устройство для подборки рядка сельскохозяйственной культуры, устройство прессования для сжатия сельскохозяйственной культуры в направлении прессования для формирования тюка, причем устройство прессования содержит средство измерения распределения степени загрузки перпендикулярно к направлению прессования.
Способ и пресс-подборщик вышеупомянутого типа описаны в ЕР 257614, в котором описывается пресс-подборщик для прессования крупных прямоугольных или, точнее, коробчатых тюков сена, соломы или другой сельскохозяйственной культуры. Этот известный пресс-подборщик содержит устройство, имеющее сжимающий плунжер с возвратно-поступательным движением для прессования сельскохозяйственной культуры в тюк. Плунжер приводится в действие посредством двух рычагов, и имеются датчики для отслеживания того, равномерно или неравномерно эти рычаги нагружены, причем последнее сигнализирует о неравномерной загрузке прессовальной камеры, которая приводит к нестандартным по форме тюкам, что является нежелательным. Регистрация показания о неравномерной нагрузке приводит к выдаче сигнала, передаваемого с помощью микрокомпьютера машинисту пресс-подборщика для выполнения коррекции управления движением относительно рядка скошенной сельскохозяйственной культуры. Этот сигнал помогает добиться получения тюка с равномерным наполнением, но при этом сигнал является дополнительным поступившим сигналом, на который тракторист должен реагировать, и сигнал, таким образом, является фактором воздействия.
В DE 3811649 описан способ равномерного наполнения пресс-подборщика, рядок скошенной сельскохозяйственной культуры детектируется механически посредством пальцев, свисающих вниз перед подбирающим устройством пресс-подборщика. На основе этого детектирования регулируют местоположение подбирающего устройства или рядка скошенной сельскохозяйственной культуры для выполнения подборки в центру пресс-подборщика. Этот способ механического детектирования считается альтернативным способу в соответствии с ЕР 257614, который имеет тот недостаток, что вмешательство в управление направлением движения инициируется только тогда, когда происходит нарушение в виде неравномерного наполнения.
Однако согласно способу DE 3811649 нет возможности компенсировать неравномерное наполнение, которое может происходить несмотря на осуществление управления. Механическое детектирование также означает, что детектирование происходит непосредственно перед подборкой сельскохозяйственной культуры, так что адекватное вмешательство в управление не может производиться своевременно.
При прессовании тюков является важным, чтобы тюки имели заданную форму, потому что тюки зачастую должны штабелироваться или упаковываться вместе в полимерную пленку.
Цель настоящего изобретения заключается в том, чтобы создать способ и пресс-подборщик, которые способны посредством автоматического управления обеспечивать равномерную степень наполнения во время прессования, так что машинист избавлен от нагрузки управления этим.
Данная цель достигается за счет того, что согласно способу управления пресс-подборщиком при подборке рядка скошенной сельскохозяйственной культуры, содержащим подбирающее устройство, которое подбирает сельскохозяйственную культуру, устройство прессования, которое подвергает подобранную сельскохозяйственную культуру сжатию в направлении прессования для формирования тюка и которое содержит средство измерения распределения степени наполнения перпендикулярно к направлению прессования, в соответствии с изобретением определяют профиль рядка скошенной сельскохозяйственной культуры перед подбирающим устройством посредством технологии формирования объемных изображений, анализируют профиль для определения распределения по высоте в направлении, перпендикулярном к рядку скошенной сельскохозяйственной культуры, управляют пресс-подборщиком таким образом, что подбирающее устройство располагают в направлении, поперечном относительно распределения по высоте, и регулируют местоположение подбирающего устройства в зависимости от измеренного распределения степени наполнения.
Предпочтительно дополнительно рассчитывают наполнение пресс-подборщика сельскохозяйственной культурой посредством суммирования определяемых распределений по высоте и их положений в направлении ширины устройства прессования как результат управления и регулируют местоположение подбирающего устройства в зависимости от рассчитанного наполнения.
Согласно способу пресс-подборщик может буксироваться трактором, при этом контролируют местоположение пресс-подборщика относительно трактора в направлении, перпендикулярном к направлению движения, и направлением движения трактора управляют таким образом, что он располагается по центру рядка скошенной сельскохозяйственной культуры.
При этом самоходный пресс-подборщик или буксирующий его трактор являются движущимся транспортным средством, при этом определяют угол между продольным направлением рядка скошенной сельскохозяйственной культуры и продольным направлением движущегося транспортного средства и определяют смещение между вертикальной центральной плоскостью рядка скошенной сельскохозяйственной культуры и вертикальной центральной плоскостью движущегося транспортного средства, и упомянутые угол и смещение используют для управления направлением движения транспортного средства и/или управления пресс-подборщиком.
Предпочтительно последовательно регистрируют множество объемных изображений поля и рядка скошенной сельскохозяйственной культуры перед пресс-подборщиком и подвергают их анализу для определения пути рядка скошенной сельскохозяйственной культуры на поле.
Также предпочтительно анализируют каждое изображение и признаки, обнаруженные в изображении, отыскивают в предыдущем изображении для определения посредством этого относительного местоположения на поле двух изображений.
Указанная цель также решается за счет того, что пресс-подборщик, содержащий подбирающее устройство для подборки рядка скошенной сельскохозяйственной культуры, устройство прессования для прессования сельскохозяйственной культуры в направлении прессования для формирования тюка, причем устройство прессования содержит средство измерения распределения степени наполнения перпендикулярно к направлению прессования, согласно изобретению содержит устройство формирования объемного изображения для регистрации объемного изображения поля и рядка скошенной сельскохозяйственной культуры перед пресс-подборщиком и управляющее устройство, содержащее процессор обработки данных для управления пресс-подборщиком в зависимости от данных из объемного изображения и степени наполнения.
При этом предпочтительно пресс-подборщик подсоединен к буксирному трактору в точке сцепки, причем точка сцепки является подвижной с возможностью управления в направлении, поперечном трактору и/или пресс-подборщику, и устройство формирования объемного изображения содержит электрооптический датчик, установленный на тракторе.
Иными словами, согласно изобретению упомянутая цель достигается способом, который характеризуется тем, что профиль рядка сельскохозяйственной культуры перед подбирающим устройством определяется посредством технологии формирования объемного изображения, что профиль подвергается анализу для определения распределения по высоте в направлении, перпендикулярном к рядку сельскохозяйственной культуры, что управление пресс-подборщиком выполняется таким образом, чтобы подбирающее устройство располагалось в поперечном направлении относительно распределения по высоте, и что местоположение подбирающего устройства регулируется в зависимости от измеренного распределения степени загрузки. Посредством использования технологии формирования объемного изображения и определения распределения по высоте профиля рядка скошенной сельскохозяйственной культуры является возможным обеспечивать определение подходящего профиля и его расположения в боковом направлении на поле достаточно далеко впереди пресс-подборщика для осуществления соответствующего вмешательства в управление. Соответствующие меры должны быть предприняты для определения усредненного значения как по отношению ко времени, так и к продолжительности вмешательства в управление. При этом можно компенсировать любую неточность в работе системы автоматического управления, которая, тем не менее, может произойти в результате, например, неточности в управлении направлением движения в целом или неравномерности в плотности по профилю рядка скошенной сельскохозяйственной культуры. Это делает возможным обеспечивать автоматическое управление направлением движением трактора, так что пользователь или тракторист избавлен от нагрузки при управлении этим, что не происходило в случае с предшествующим уровнем техники.
Пресс-подборщик может быть любого типа, такой как пресс-подборщики с прессованием прямоугольных или коробчатых тюков, или рулонных тюков.
В варианте преимущественного осуществления загрузка пресс-подборщика сельскохозяйственной культурой, как уже говорилось, оценивается суммированием определенных значений распределения по высоте и их местоположения в направлении по ширине устройства прессования в качестве результата управления, а местоположение подбирающего устройства регулируется в зависимости от оцененной загрузки. Это обеспечивает более высокую достоверность равномерной загрузки. Если рядок скошенной сельскохозяйственной культуры является узким относительно пресс-подборщика, то применение этого способа может в результате привести к заданному движению с отклонением в горизонтальном направлении, тем самым сельскохозяйственная культура, например, попеременно загружается на одну или другую сторону пресс-подборщика.
В варианте преимущественного осуществления, в котором пресс-подборщик буксируется за трактором, расположение пресс-подборщика контролируется по отношению к трактору поперек направления движения и трактор направляют так, что он располагается центрально относительно рядка скошенной сельскохозяйственной культуры. В связи с этим колеса трактора не движутся по рядку скошенной сельскохозяйственной культуры, а обжимают его, в то время как достигается требуемое управление пресс-подборщиком. Как вариант и более просто, движение трактора можно направлять для позиционирования пресс-подборщика относительно рядка скошенной сельскохозяйственной культуры.
Пресс-подборщик может быть самоходным или буксируемым за трактором.
В предпочтительном варианте осуществления изобретения, в котором приводное транспортное средство является самоходным пресс-подборщиком или буксирным тягачом, определяется угол между продольным направлением рядка скошенной сельскохозяйственной культуры и продольным направлением приводного транспортного средства, и также определяется смещение при расположении уступом между вертикальной диаметральной плоскостью рядка скошенной сельскохозяйственной культуры и вертикальной диаметральной плоскостью приводного транспортного средства, и упомянутый угол и смещение при расположении уступом используются для управления направлением движения и/или контролирования. Определение как смещения при расположении уступом, так и угла обеспечивает более значительную предсказуемость и соответственно более значительную точность управления.
В другом варианте предпочтительного осуществления ряд объемных изображений поля и рядка скошенной сельскохозяйственной культуры впереди пресс-подборщика последовательно регистрируются и анализируются для определения трассы рядка скошенной сельскохозяйственной культуры на поле. Предпочтительно каждое изображение анализируется и признаки, найденные в изображении, отыскиваются в предыдущем изображении для определения, таким образом, относительного местоположения на поле двух изображений. Как вариант или дополнение используются гироскоп, глобальная (спутниковая) система местоопределения (GPS) и/или одометрия и другие подобные средства и способы для измерения изменения в местоположении или ориентации транспортного средства и аппарата для съемки между двумя изображениями, например изображениями n и n+1, для определения относительного местоположения на поле двух изображений. Таким образом, при управлении пресс-подборщиком может приниматься во внимание любой изгиб трассы рядка скошенной сельскохозяйственной продукции на поле. Это делает к тому же возможным направлять пресс-подборщик в определенное место даже на местности с боковым уклоном, где трактор и пресс-подборщик будут находиться под углом относительно направления движения из-за воздействия силы тяготения.
Как уже говорилось, цель изобретения также достигается с помощью пресс-подборщика упомянутого во вступлении типа, такой пресс-подборщик отличается тем, что он содержит устройство формирования объемного изображения для регистрации объемного изображения поля и рядка скошенной сельскохозяйственной культуры впереди пресс-подборщика и управляющее устройство, содержащее устройство обработки данных для осуществления управления пресс-подборщиком в зависимости от данных по объемному изображению и степени загрузки. Такой пресс-подборщик может использоваться с применением способа в соответствии с изобретением. Пресс-подборщик может быть самоходным, или он может быть буксируемым посредством трактора. В последнем случае устройство формирования объемного изображения предпочтительно устанавливать на трактор для регистрации изображения поля впереди трактора.
Как упомянуто в описании способа в соответствии с изобретением, пресс-подборщик может быть любого типа.
Устройство формирования объемного изображения является устройством с электрооптическим датчиком и аппаратурой обработки изображений и способно обеспечивать изображение с разбиением по элементам с данными по глубине, то есть данными о расстоянии от наблюдаемой точки до аппарата для съемки, по меньшей мере, для нескольких пиксельных, поэлементных изображений. Устройство формирования объемного изображения, таким образом, может быть аппаратом для стереоскопической съемки с процессором обработки сигнала, то есть один или два аппарата для съемки, которые обеспечивают два изображения со смещением при расположении уступом, вследствие чего процессор обработки сигнала обеспечивает данные по глубине на основе различий в изображениях, например, посредством триангуляционной съемки. Другая возможность состоит в том, что принцип действия устройства формирования объемного изображения основан на измерении времени распространения волн, в соответствии с которым происходит излучение светового импульса и измеряется время получения отраженного сигнала в соответствующих элементах изображения, пикселях, в аппарате для съемки для обеспечения данных отсчета по глубине.
Изобретение описано ниже более подробно на примере варианта его воплощения и со ссылкой на схематичные чертежи, в которых:
фиг.1 - вид сверху пресс-подборщика, буксируемого трактором во время выполнения подборки рядка скошенной сельскохозяйственной культуры;
фиг.1а - профиль рядка скошенной сельскохозяйственной культуры;
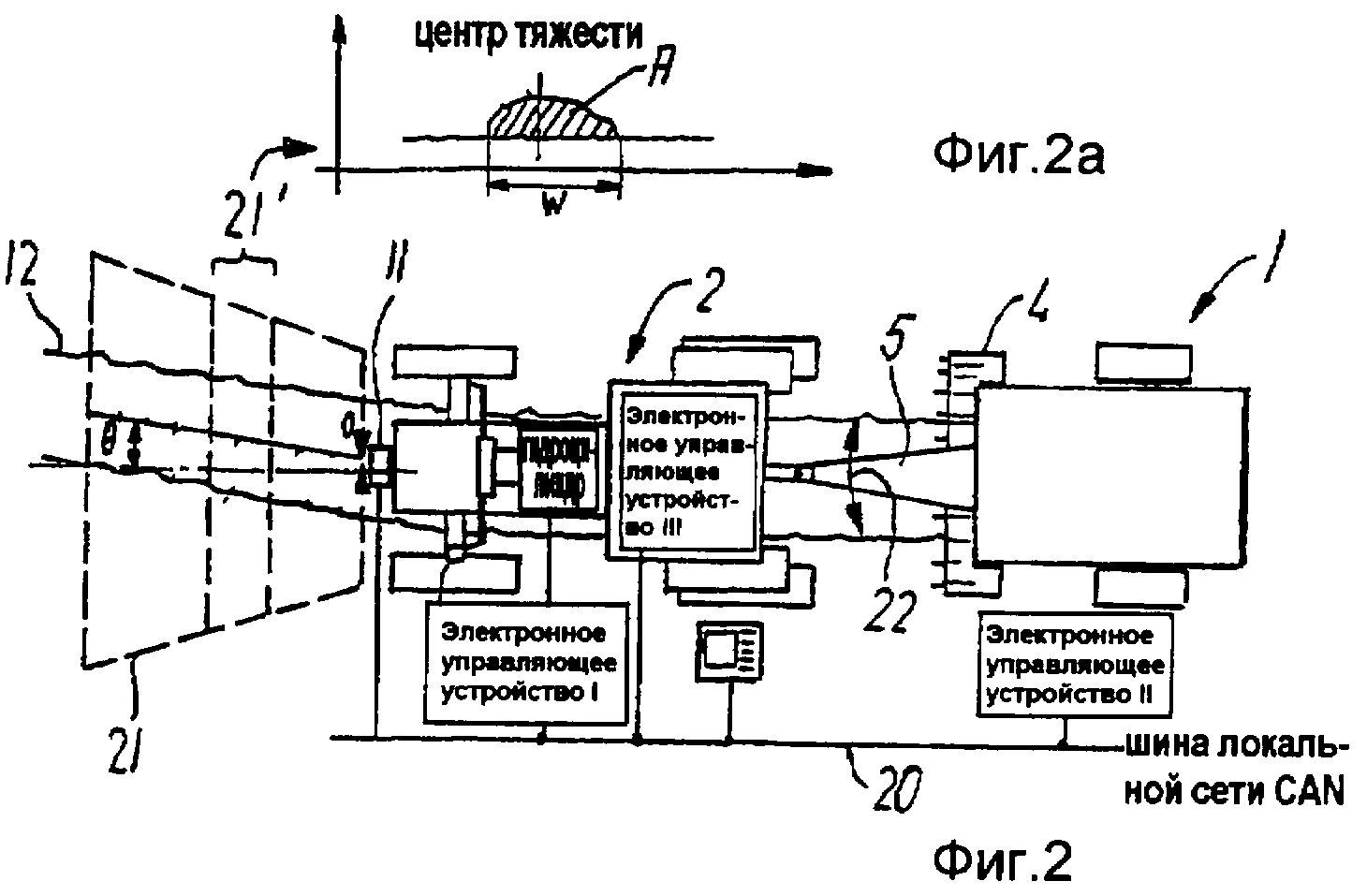
фиг.2 - вид сверху, соответствующий виду на фиг.1, но отображающий выполнение подборки изгибающегося рядка скошенной сельскохозяйственной культуры;
фиг.2а - профиль рядка скошенной сельскохозяйственной культуры;
фиг.3 - измерение степени наполнения тюка по всей ширине;
фиг.4 - примеры профилей тюков;
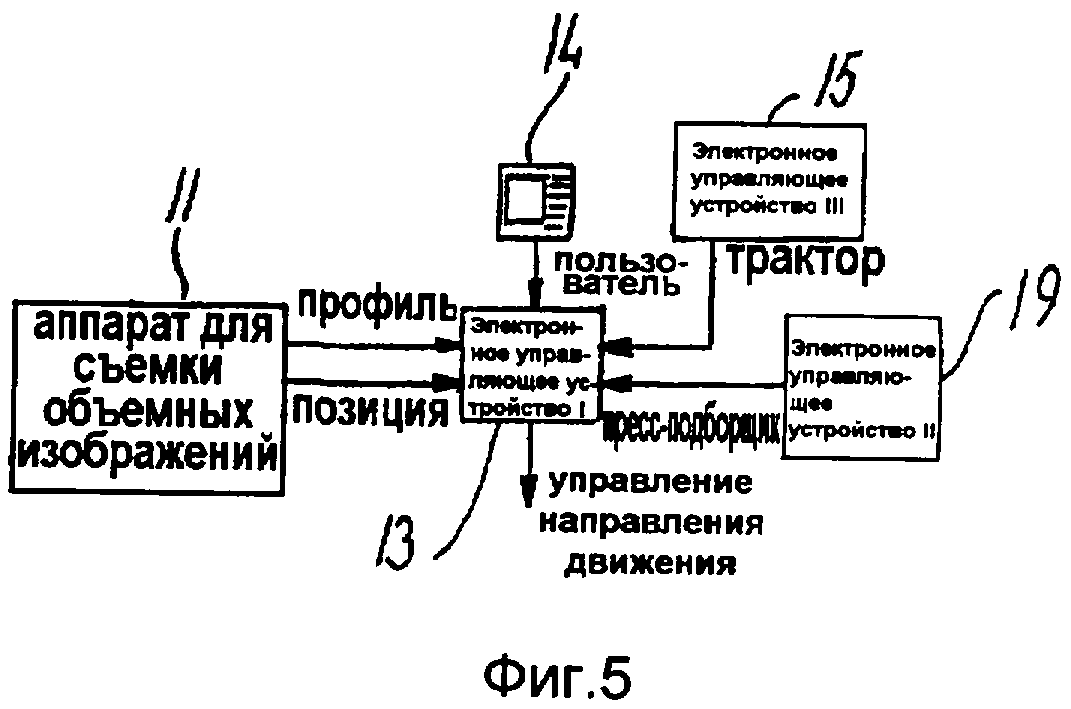
фиг.5 - система управления, и
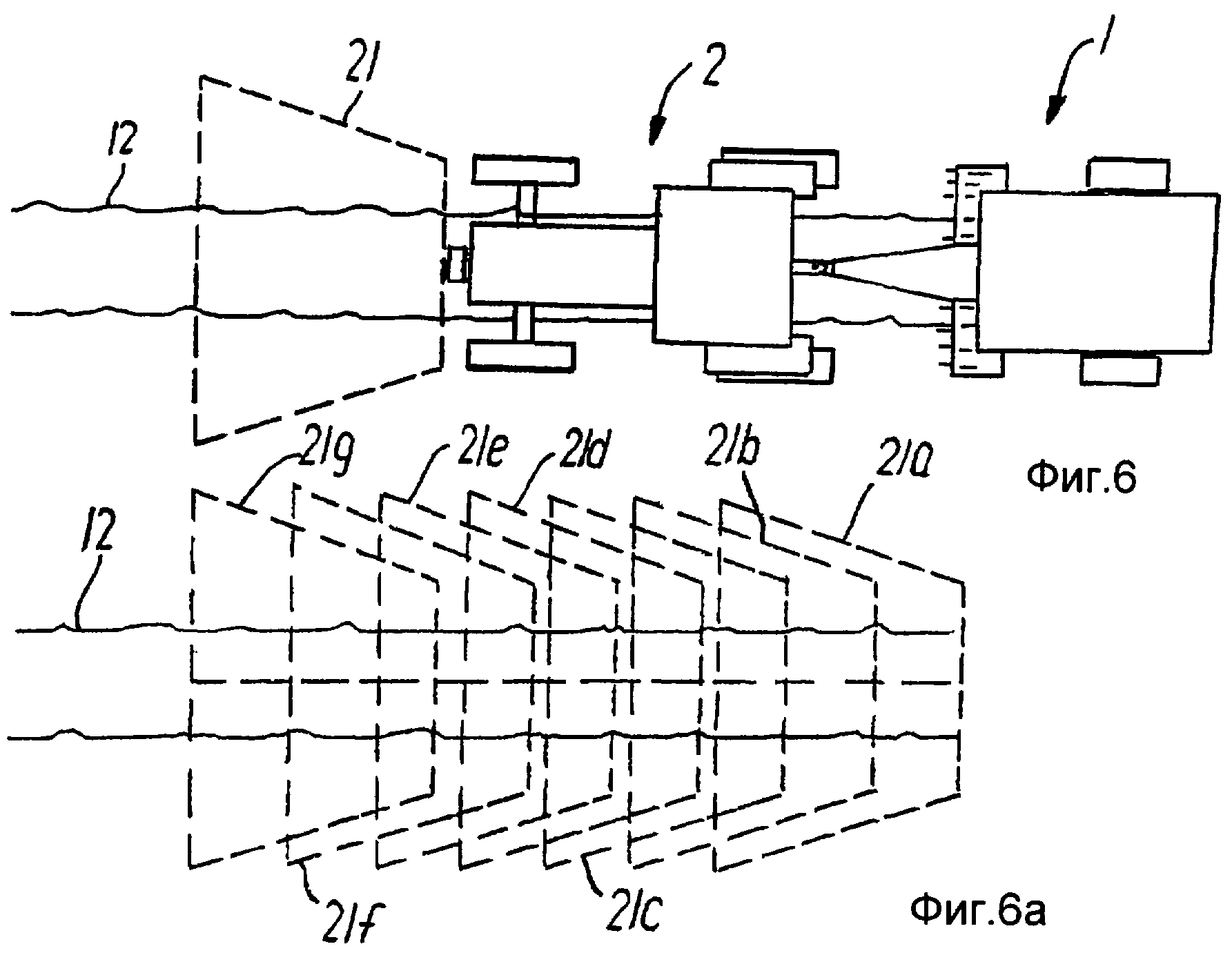
фиг.6 и 6а - соединение нескольких изображений для создания карты.
На всех Фиг.1, 2 и 6 показан пресс-подборщик 1, сцепленный с буксирным трактором 2. Пресс-подборщик 1 имеет колеса 3, подборщик 4, дышло 5 и прессовальную камеру, не показанную подробно. Трактор 2 содержит кабину 6 тракториста, задние колеса 7, передние колеса 8 с возможностью поворота посредством гидроцилиндра 9 и сцепное устройство 10 для закрепления дышла 5 пресс-подборщика. На самой передней части трактора установлено устройство формирования объемного изображения в виде стереокамеры 11, содержащей процессор обработки сигнала.
Стереокамера 11 регистрирует изображения рядка 12 скошенной сельскохозяйственной культуры - сена/соломы/травы - перед трактором.
Трактор 2 оснащен электрогидравлическим управляющим устройством с процессором 13, гидроцилиндром 9 и дистанционным пультом 14 с монитором для обмена информацией с пользователем. У трактора есть другой процессор 15 для управления и оперативного контроля различных функций в тракторе, например функции безопасности, и датчики, например, для измерения скорости и измерения местоположения колес.
Пресс-подборщик 1 оснащен средством измерения распределения степени наполнения в направлении прессования в виде индикаторного устройства (фиг.3), которым можно измерять возможный недостаток материала с одной из боковых сторон тюка или, возможно, в нескольких местах по всему тюку. Индикаторное устройство поэтому показано с двумя рычагами 16, один конец каждого из которых опирается на тюк 17 (в данном случае рулон), и при вращении которого относительно установочной позиции 18 на другом конце (рычага) выполняется измерение. Процессор 19 отслеживает величины поворота рычагов 16 и, в частности, разницы в таких поворотах, которые показывают степень неравномерного наполнения. Фиг.4 показывает три тюка 17а, 17b, 17с: неравномерный с одной стороны, равномерный и неравномерный с другой стороны соответственно. Причем тюки с недостатком материала неравномерны с левой и правой стороны соответственно как результат неравномерного наполнения по всей их ширине, то есть поперек направления прессования.
Все датчики, процессоры или электронные управляющие устройства (ECU) 3, 15, 19 и камера 11 являются непосредственно или опосредованно соединенными посредством шины сети 20 (CAN) для передачи информации между такими устройствами.
Работа устройства, описанного таким образом, описана ниже со ссылкой на фиг.2.
Стереокамера 11 регистрирует изображение 21 рядка 12 скошенной сельскохозяйственной культуры - сена/соломы /травы - приблизительно с 1 метра до 6 метров перед трактором 2 и производит анализ изображения 21. Результат, называемый «позиция», представляет собой положение рядка скошенной сельскохозяйственной культуры относительно трактора. Это положение представляет собой смещение или отклонение О и угол θ относительно середины рядка или валка 12. Эти данные являются первичными данными для управления направлением движения трактора 2 и пресс-подборщика 1 прямо над валком 12.
Для того чтобы управлять загрузкой пресс-подборщика 1, профиль валка 12 (фиг.la) непрерывно анализируется с определением площади А поперечного сечения, ширины W и центра тяжести COG с тем, чтобы материал сельскохозяйственной культуры мог быть равномерно распределенным по всей ширине прессовальной камеры. Результат анализа профиля, «профиль», используется для перемещения трактора и пресс-подборщика в боковом направлении по отношению к линии оптимального управления направлением движения на основе «позиции».
В начале прессования тюка используется управление в разомкнутой цепи без обратной связи на основе результатов анализа профиля, «профиля». На каком-то этапе индикаторное устройство (фиг.3) пресс-подборщика 1 в зависимости от условий может начать выдавать сигнал о том, что не хватает материала с одной из сторон тюка 17. Эта информация будет использоваться вместе с «позицией» и «профилем» для осуществления управления в замкнутой системе с обратной связью и исправления положения с недостающим материалом с одной стороны. Когда индикаторное устройство пресс-подборщика 1 показывает, что тюк является равномерным (как тюк 17b), осуществление управления в разомкнутой системе возобновляется на основе данных по «профилю».
В другом варианте осуществления направляют трактор 2 прямо над валком 12 либо посредством ручного либо автоматического управления движением на основе изображения 21 с камеры 11 для съемки и электрогидравлического управления. Для оптимального наполнения пресс-подборщика 1 пресс-подборщик располагается сбоку относительно трактора. Этого можно достичь, например, если дышло 5 пресс-подборщика 1 выполнено с возможностью регулируемого качания из стороны в сторону, как показано стрелкой 22, направленной в противоположные стороны, например, с помощью гидроцилиндра, не показанного, или если сцепное устройство 10 на тракторе 2 является регулируемо подвижным из стороны в сторону.
Обработка изображения для определения «позиции» может состоять в анализе комбинации данных по высоте, цвету/или структуре. На первом этапе необходимо произвести распознавание между материалом (таким, как сено, солома, трава, и т.д.) и фоном. Второй этап состоит в установке линии в середину материала и определении от нее угла θ и смещения О валка 12 относительно трактора 2.
В связи с определением смещения О и угла θ определяются корец валка 12 и различные препятствия и неровности, о которых может предупреждаться пользователь или которые могут приводить к остановке трактора.
Обработка изображения для определения «профиля» может заключаться в непрерывном анализе всего изображения или участка 21' изображения 21 (фиг.1a и 2а) по всему валку 12. Профиль 23 на участке 21' аппроксимирован с помощью ряда столбцов 24 с соответствующим разрешением. При соответствующем подходящем разрешении по ширине тюка 17 доли из каждого анализа профиля добавляются к расчетного наполнения 25 и определяется, где должен помещаться материал сельскохозяйственной культуры на его пути в пресс-подборщик и с аппроксимированным профилем 24 для получения (непрерывного) равномерного распределения суммированных долей к распределению материала скошенной сельскохозяйственной культуры, то есть (непрерывного) расчета наполнения 25.
Для того чтобы просчитать, каким образом материал сельскохозяйственной культуры поступает в пресс-подборщик 1, если валок 12 не является достаточно прямым, результаты от изображения к изображению 21а, 21b… 21g могут объединяться вместе в карту по длине трактора 2 и пресс-подборщика 1. Анализ этой карты сделает возможным вычислить, где находится валок 12 относительно подборщика 4 пресс-подборщика 1, даже при движении по кривым траекториям.
Для определения местоположения пресс-подборщика 1' относительно трактора 2 на наклонной местности и в других трудных условиях может быть необходимым непрерывно производить измерение угла между соответствующими продольными центральными плоскостями трактора 2 и пресс-подборщика 1.
Если трактор 2 или пресс-подборщик 1 оснащен аппаратурой глобальной (спутниковой) системой местоопределения (GPS), то возможно непрерывно совершать сохранение участков площади поперечного сечения валка вместе с местоположением, определенным посредством системы GPS для того, чтобы была создана карта убранного поля.
Реферат
Группа изобретений относится к сельскохозяйственному машиностроению и может быть использована при уборке сельскохозяйственных культур. Пресс-подборщик включает подбирающее устройство для подборки рядка скошенной сельскохозяйственной культуры, устройство прессования для формирования тюка, устройство формирования объемного изображения поля и рядка и управляющее устройство. Устройство прессования содержит средство измерения степени наполнения прессовальной камеры. Устройство формирования объемного изображения регистрирует объемное изображение поля и рядка скошенной сельскохозяйственной культуры перед пресс-подборщиком. Управляющее устройство содержит процессор обработки данных для управления пресс-подборщиком в зависимости от данных из объемного изображения и степени наполнения. Изобретения обеспечивают равномерную степень наполнения прессовальной камеры и избавляют машиниста от управления процессом прессования. 2 н. и 6 з.п. ф-лы, 6 ил.
Комментарии