Комбинация подвижного трактора и пресс-подборщика, способ управления комбинацией подвижного трактора и пресс-подборщика и машиночитаемый носитель, содержащий команды для осуществления способа - RU2738777C1
Код документа: RU2738777C1
Чертежи
Описание
УРОВЕНЬ ТЕХНИКИ
Изобретение относится к комбинации трактора и пресса-подборщика.
В области техники сельскохозяйственных машин широко известно, что следует буксировать колесный пресс-подборщик за трактором с целью производства кип из ценных стеблевых (или других составляющих растения) продуктов, таких как сено, силосная растительность и солома, которые укладываются на полях по мере того, как происходят операции жатвы или сенокоса. В большинстве случаев, пресс-подборщик не является ни автономным, ни самоходным, а взамен, буксируется за сельскохозяйственным трактором, с которого он получает мощность вращения для приведения в действие своих компонентов подбирающего барабана и внутренних механизмов.
Сено, солома или аналогичные продукты, требующие тюкования, обычно оставляются на полях в виде валков или полос скошенного жнивья, то есть, длинных рядов продуктов, о которых идет речь, которые нагромождены в центре в поперечном направлении и имеют тенденцию уплощаться на соответственных кромках в поперечном направлении. Хотя, согласно некоторым определениям, есть различия, например, между валками и полосами скошенного жнивья, кроме тех случаев, где требует контекст, в материалах настоящей заявки эти термины используются взаимозаменяемо.
Каждый валок обычно продолжается в виде как можно более прямой линии на протяжении почти всей длины поля. Типично, поле, которое подверглось жатве, содержит много по существу взаимно параллельных валков. Валки разнесены друг от друга с по большей части постоянными интервалами, которые чаще всего определяются самой широкой частью, которой обычно является жатка или передний режущий механизм уборочного комбайна или косилки, применяемых для скашивания продуктов жатвы, о которых идет речь.
Ширина валка почти всегда меньше колеи колес трактора, который впоследствии должен проходить вдоль валков. Как результат, такой трактор может перемещаться с одним рядом колес по каждую сторону от валка во время работ по прессовке в кипы. В другие моменты времени желательно, чтобы трактор двигался вдоль валка с прессом-подборщиком, буксируемым за и смещенным в боковом направлении относительно трактора, так чтобы только колеса пресса-подборщика охватывали валок с двух сторон.
В некоторых случаях, особенно когда продуктом жатвы является сено, известно, что следует использовать мотовило для сена, ворошилку или грабли, прикрепленные к трактору, после того, как валки полежали в течение некоторого периода, для того чтобы перевернуть валки, оставленные косилкой и, тем самым, добиться требуемой степени проветривания стеблей (или других частей растений, если таковые представляют интерес). В таких случаях, получающиеся в результате полосы скошенного жнивья, тем временем, в целом придерживаясь линий валков, оставленных косилкой, могут иметь размеры, отличающиеся от размеров стеблей непосредственно после укладки, и т.д.
Изобретение применимо при использовании прессов-подборщиков для тюкования стеблей (или, по желанию, других частей растений) в уложенном в валках виде; или в полосах скошенного жнивья, созданных вторичной операцией, такой как сгребание, ворошение или разматывание сена.
Прессы-подборщики подразделяются на несколько категорий. Наиболее распространенными типами, используемыми в настоящее время, являются типы для производства так называемых «рулонных» кип обычно из сена или соломы (которые являются приблизительно цилиндрическими); и типы для создания так называемых «прямоугольных» или «квадратных» тюков (которые имеют форму параллелепипеда). Каждый тип кипы связан с конкретными характеристиками хранения и транспортировки.
Среди тюковых прессов-подборщиков, самые распространенные типы производят «большие прямоугольные тюки» или «средние прямоугольные тюки». Как подразумевают названия, первые больше последних.
Независимо от точного типа, при использовании, пресс-подборщик прицеплен к задней части трактора, и вал отбора мощности (РТО) трактора присоединен, чтобы выдавать привод вращения на пресс-подборщик. Вал РТО вращается с частотой вращения, определяемой настройками двигателя трактора и, в ряде случаев, некоторыми другими переменными параметрами, которые, например, выполнены с возможностью настраиваться водителем трактора или в результате автоматических или полуавтоматических управляющих воздействий, инициированных в тракторе или прессе-подборщике, таких как когда один или более датчиков вырабатывают конкретный выходной сигнал, класс выходного сигнала, значение или диапазон. Типично, вал РТО включает универсальный карданный шарнир или аналогичное гибкое передающее привод устройство, с тем результатом, что соединение с прессом-подборщиком не должно быть расположено прямо на одной прямой с соединением РТО на тракторе, а взамен может быть смещено от него в боковом направлении.
Вал РТО обеспечивает привод вращения для различных частей пресса-подборщика, которые движутся, чтобы вызывать прием внутрь и прессование в кипы стеблей. US 4433533 А включает пояснение работы рулонного пресса-подборщика. Пример работы тюкового пресса-подборщика описан в FR 2684517 А.
Изобретение применимо к комбинациям трактора и пресса-подборщика, включающим рулонные прессы-подборщики и тюковые прессы-подборщики всех типов, в том числе, но не ограничиваясь, описанные выше, и конечно может использоваться всякий раз, когда требуется буксировать подборочную машину поблизости от валков или полос скошенного жнивья.
При буксировке пресса-подборщика, цель водителя трактора обычно состоит в том, чтобы поддерживать конкретную часть (такую как центральная точка передней части в поперечном направлении) пресса-подборщика на одной линии с центровой линией валка, подлежащего подбору и прессованию в кипы. Некоторые прессы-подборщики, такие как описанные в US 4433533 А и FR 2684517 А, включают признаки, дающие центру в поперечном направлении буксируемого пресса-подборщика возможность перемещаться к и от смещенного положения относительно центровой линии трактора во время буксировки, чтобы подбирать стебли. Это желательно для того, чтобы управлять частью переднего проема пресса-подборщика, в который принимаются стебли (или другие части растений), и, тем самым, обеспечивать равномерное заполнение камер(ы) пресса-подборщика. Это полезно, так как неравномерное заполнение может приводить к созданию кип, которые имеют неправильную форму и/или недостаточно прочны для транспортировки и хранения и/или имеют переменную плотность, а отсюда низкую рыночную стоимость.
В некоторых случаях, зерновые засеваются на полях некоторым образом, который оставляет соответственную приграничную область (называемую поворотной полосой) по каждую из двух противоположных сторон поля, в которой зерновые не выращиваются. В альтернативном варианте, на многих полях, зерновые засеваются по всей площади поля вплоть до кромок поля. В таких случаях, когда происходит жатва на поле, уборочный комбайн, например, сначала выполняет один или два круговых прохода по внешней периферии поля, для того чтобы создать свободную от зерновых приграничную область, которая подобна поворотной полосе за исключением того, что она продолжается по всей периферии поля на ширину некоторого количества проходов уборочного комбайна.
Пространство, такое как поворотная полоса или вышеупомянутая сжатая периферия, необходимо по различным причинам, одна из которых состоит в том, чтобы дать возможность маневра сельскохозяйственных транспортных средств и сцепок транспортных средств без проезда по, а отсюда непроизводительной растраты, обрабатываемой зерновой культуры.
Когда зерновая культура пожинается с использованием уборочного комбайна, стебли или другой растительный материал, который требуется подбирать и прессовать в кипы, оставляется в валках на поле, как кратко изложено выше. В результате отсутствия зерновой культуры на поворотных полосах поля, эти области обычно свободны от валков. Если периферийная свободная от зерновых приграничная область создается в начале во время жатвы, стебли, лежащие в этой приграничной области, подбираются и прессуются в кипы первыми, для того чтобы обеспечить свободное от валков пространство. Во время операций тюкования, поворотная полоса или периферийное пространство на каждом краю или обочине поля, таким образом, предусматривает пространство, в котором комбинация трактора и пресса-подборщика может маневрировать, для того чтобы располагать себя для тюкования растительного материала в параллельных валках, продолжающихся вдоль поля.
Типично, комбинация трактора и пресса-подборщика въезжает на поле в поворотной полосе и выстраивается в линию, чтобы подбирать и прессовать в кипы первый из валков, подлежащих подбору и прессованию в кипы. Это мог бы быть валок на краю последовательности по существу параллельных валков на поле, или он может находиться на полпути вдоль последовательности валков. Выбор того, какой валок подбирать и прессовать в кипы первым, потенциально определяется некоторым количеством факторов, зачастую основным из которых является расположение въезда на поле относительно последовательности валков, хотя другие факторы, такие как, но не в качестве ограничения, предпочтение водителя, вероятное или выявленное влагосодержание валков, планировка и топография поля, ширина поворотной полосы и наличие препятствий, также могут быть значимыми.
Во время использования, комбинация трактора и пресса-подборщика движется вдоль выбранного валка и выкладывает законченные кипы позади пресса-подборщика по мере того, как она делает это. Как только первый валок был подобран и спрессован в кипы таким образом, трактор достигает поворотной полосы на краю поля, противоположном тому, на котором начинались подборка и прессование в кипы. В этот момент, комбинация трактора и пресса-подборщика должна развернуться, для того чтобы перемещаться вдоль поля в противоположном направлении, для того чтобы подбирать и прессовать в кипы следующий валок, который должен быть подобран. Это может быть валок, который в последовательности валков является непосредственно смежным с подобранным и спрессованным в кипы в начале валком, или (в зависимости от поперечного разнесения валков, размеров поворотной полосы, и так далее) он может быть отделен от подобранного и спрессованного в кипы в начале валка одним или более промежуточных валков.
Если поворотная полоса относительно широка, есть пространство, чтобы комбинация трактора и пресса-подборщика развернулась на 180 градусов, для того чтобы подойти к следующему валку, подлежащему подборке и прессованию в кипы, концом к себе, с прессом-подборщиком, выровненным для приема культуры внутрь, до того, как он наезжает на конец валка.
На многих полях, однако, поворотная полоса не достаточно широка, чтобы дать комбинации трактора и пресса-подборщика возможность развернуться на 180 градусов до того, как по меньшей мере трактор, а возможно также и пресс-подборщик наезжает на конец валка. Это, например, может происходить потому, что поворотная полоса узка; или так как комбинация трактора и пресса-подборщика слишком длинна в масштабах поля, на котором требуется, чтобы она работала и, взамен, предназначена для работы на большем поле, имеющем более широкую поворотную полосу. К тому же, наличие препятствий, которые вторгаются в поворотную полосу, может уменьшать пространство, имеющееся в распоряжении для разворота комбинации трактора и пресса-подборщика.
В наши дни новые тракторы все больше и больше включают или могут быть дооснащены датчиками, такими как оптические датчики, которые считывают область перед трактором. Процессор, формирующий часть или функционально присоединенный к трактору, может строить из выходных показаний датчиков базу данных, выходной сигнал изображения, диаграмму или карту местности, в направлении которой держит курс трактор.
Такой выходной сигнал может быть полезен, когда трактор буксирует пресс-подборщик, поскольку это дает возможность оптимизировать положение пресса-подборщика в боковом направлении относительно валка. Как результат, прием внутрь растительного материала может происходить некоторым образом, который гарантирует заполнение камер(ы) пресса-подборщика, с тем чтобы минимизировать риск формирования кип переменной плотности или неполных кип. Как пояснено выше, создание таких кип нежелательно.
Один из способов, которым может использоваться такой выходной сигнал датчика, состоит в том, чтобы идентифицировать линию, прочерчиваемую центром тяжести выявленного поперечного сечения валка. В материалах настоящей заявки это упоминается как «линия валка» или «линия по валку». Процессор может вычерчивать или регистрировать такую линию и использовать ее в качестве входных данных в способ управления для пресса-подборщика. Такой способ управления может включать минимизацию отклонения предпочтительной части пресса-подборщика, такой как центр в боковом направлении подбирающего барабана в передней части пресса-подборщика, от линии валка. Корректировки поперечного положения пресса-подборщика, например, могут осуществляться посредством побуждения управления направлением движения трактора или посредством настройки механизма пресса-подборщика, который вызывает смещение в боковом направлении, как упомянуто выше. В отношении первого, многие современные тракторы включают признаки, дающие возможность автоматизации функций управления направлением движения. Такие признаки включают исполнительные механизмы с силовым приводом, такие как гидравлические или электрические двигатели, тяги и элементы управления, которые типично являются программируемыми и принимают форму процессоров, установленных в или, при использовании, функционально присоединенных к трактору.
Аспект механизмов с датчиками, кратко изложенных выше, существующих в предшествующем уровне техники, состоит в том, что они считывают местность только перед трактором. Как результат, когда трактор достигает конца валка во время выполнения работ по прессовке в кипы, или когда трактор перемещается в поворотной полосе в направлении, которое не выровнено с валком концом к себе, вообще не возможно, чтобы датчик и его связанный процессор отображали линию валка.
В такой момент времени, для того чтобы начать подбор и прессование в кипы нового валка, необходимо, чтобы водитель трактора поворачивал трактор по меньшей мере до тех пор, пока валок не находится в поле обзора датчика перед трактором. На практике, маловероятно, что водитель трактора после этого передаст управление комбинацией трактора и пресса-подборщика обратно какой бы то ни было автоматизированной системе, как описано выше, до тех пор, пока комбинация не проехала некоторое расстояние вдоль следующего валка, подлежащего подбору и прессованию в кипы.
Такой подход связан с недостатками в показателях эффективности формирования кип.
Это отчасти происходит потому, что водитель трактора может не располагать трактор очень точно относительно валка с тем результатом, что корректировки поперечного положения комбинации трактора и пресса-подборщика требуются до того, как положение подбирающего барабана пресса-подборщика оптимизируется относительно линии валка. Если, что вероятно, водитель сохраняет за собой управление направлением движения комбинации трактора и пресса-подборщика на протяжении некоторого расстояния после того, как трактор наехал на валок, это может приводить к неэффективному заполнению пресса-подборщика на значительной доле длины валка.
К тому же, система, полагающаяся на выходной сигнал направленного вперед датчика на тракторе, может давать в результате не лучшее расположение пресса-подборщика, даже если водитель передает управление обратно комбинации датчика и процессора вскоре после того, как датчик выявляет новый валок. Это происходит потому, что процессор может находиться в зависимости от сигналов с датчиков на прессе-подборщике, для того чтобы определять, оптимизировано ли поперечное положение пресса-подборщика, и ему может потребоваться несколько метров пройденного пути пресса-подборщика вдоль валка, прежде чем получены содержательные или достаточное количество данных.
Процессор в течение такого времени может не получать полезную обратную связь о положении пресса-подборщика. Как следствие, поперечное положение подбирающего барабана может быть не лучшим дольше, чем необходимо.
Дополнительная возможная проблема состоит в том, что водитель может просто начинать поворачивать на валок раньше или позже, чем требуется с точки зрения оптимизации наполнения пресса-подборщика. Вновь, в результате может происходить потеря ценного растительного материала в кипах.
Согласно изобретению, в первом аспекте предложена комбинация подвижного трактора и пресса-подборщика, включающая (а) самодвижущийся трактор, имеющий множество взаимодействующих с землей элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с землей элемента, с тем чтобы вызывать изменения направления движения трактора; (b) пресс-подборщик, который буксируется за трактором по мере того, как трактор движется поступательно, и шарнирно присоединенный к трактору; (с) один или более датчиков для считывания одной или более линий (здесь - линий валка) убираемого материала, соответствующих максимальному количеству убираемого материала на единицу длины валка; и (d) устройство управления, которое функционирует в зависимости от по меньшей мере одного выходного сигнала одного или более датчиков, чтобы приводить в действие рулевой механизм трактора, так чтобы пресс-подборщик придерживался упомянутой линии валка некоторым образом, оптимизирующим прием убираемого материала в пресс-подборщик для прессования с кипы, при этом один или более упомянутых датчиков являются по меньшей мере временно функционирующими для считывания линии валка, которая смещена в боковом направлении от направления поступательного движения трактора.
Такое устройство способно выявлять валок и определять его линию валка, даже когда трактор обращен в направлении, которое препятствует считыванию валка направленным вперед датчиком.
Как результат, операции управления, нацеленные на оптимальное поворачивание комбинации пресс-подборщика, чтобы начинать подбор и прессование в кипы валка, могут инициироваться при маневрировании комбинации трактора и пресса-подборщика в поворотной полосе в лучший момент времени (типично, но не обязательно в более ранний момент времени), чем было возможно в предшествующем уровне техники.
Более того, наличие датчика, который выявляет смещенные в боковом направлении валки, означает, что больший объем управления маневром в поворотной полосе, чем было возможно в предшествующем уровне техники, может происходить автоматически, под управлением программного обеспечения и технических частей, которые имеются в распоряжении для управления направлением комбинации трактора и пресса-подборщика. Это как правило повышает точность оптимизации наполнения пресса-подборщика.
В оптимальном варианте осуществления изобретения, один или более упомянутых датчиков выполнены с возможностью перемещения между первой ориентацией, в которой они обращены вперед трактора, и второй ориентацией, в которой они обращены в сторону от трактора.
Такой датчик может быть прикреплен к трактору, например, посредством поворотного установочного элемента. Такой установочный элемент может давать одну или больше одной степеней свободы при перемещении датчика между первой и второй ориентациями. Таким образом, в некоторых вариантах осуществления изобретения, датчик может быть поворотным в одной плоскости, например, между ориентацией прямо вперед и обращенной в боковом направлении ориентацией. В других вариантах осуществления, датчик может быть поворотным в двух плоскостях, так чтобы могли настраиваться его направление и угол занижения или возвышения. Последнее может быть полезным, например, когда комбинация трактора и пресса-подборщика передвигается по неровной почве.
В практических вариантах осуществления изобретения, по выбору, трактор включает один или более двигателей для осуществления перемещения по меньшей мере одного упомянутого датчика между первой ориентацией и второй ориентацией.
Как результат, оптимизация ориентации подвижного датчика для выявления смещенных в боковом направлении линий валка может происходить автоматическим образом. Двигатели могут принимать любой диапазон форм, в том числе, электрических, гидравлических и пневматических устройств.
В альтернативном варианте осуществления изобретения, один или более датчиков включают соответственные первый и второй датчики для считывания одной или более линий валка, первый датчик обращен вперед трактора, а второй датчик обращен поперечно или в боковом направлении относительно трактора.
При таком устройстве, первый и/или второй датчик могут быть установлены на тракторе неподвижно, так чтобы их ориентации были неизменными относительно ориентации трактора. Равным образом, один или оба датчика, о которых идет речь, могут быть поворотными, например, как описано выше. В таком варианте осуществления, один или более двигателей могут быть предусмотрены для осуществления изменений ориентации одного или обоих соответственных датчиков. Такие двигатели могут быть как описанные в материалах настоящей заявки.
При определении датчиков в качестве неподвижно установленных на тракторе, это означает, что основные части или корпуса датчиков неподвижны относительно трактора. Как пояснено в материалах настоящей заявки, даже при таком устройстве, остается возможность настраивать, например, поле обзора датчика, например, посредством настройки относительных положений внутренней оптики или других чувствительных компонентов датчиков; и/или посредством фильтрации или иной избирательной обработки выходных сигналов датчиков.
Следует понимать, что, в вариантах осуществления изобретения, когда предусмотрены соответственные первый и второй датчики, типично, по меньшей мере один упомянутый датчик установлен на тракторе. В практических компоновках, вероятно, что оба соответственные первый и второй датчики установлены на тракторе, но это не обязательно должно быть так. Таким образом, можно, чтобы один или более датчиков были расположены на прессе-подборщике. Как будет известно специалисту в данной области техники, выходной сигнала такого датчика может подаваться в процессор, формирующий часть или функционально присоединенный для управления рулевым механизмом трактора.
Подробнее, по выбору, упомянутый датчик, обращенный вперед трактора, считывает линию валка, продолжающуюся вперед от передней части трактора; а упомянутый датчик, обращенный в сторону от трактора, считывает линию валка, продолжающуюся в боковом направлении от трактора. В качестве используемых в материалах настоящей заявки, фразы «обращенный вперед трактора» и «обращенный в боковом направлении от трактора» не исключают возможность установки одного или обоих датчиков, о которых идет речь, на прессе-подборщике, хотя ожидается, что, в большинстве вариантов осуществления изобретения, по меньшей мере один из датчиков будет установлен на тракторе.
К тому же, следует понимать, что ссылки на линию валка, продолжающуюся «в боковом направлении от трактора» или «поперечно относительно трактора», не ограничены линиями валка (или считыванием линий валка), продолжающимися под прямыми углами к преобладающему направлению движения или (если трактор неподвижен) ориентации трактора. В противоположность, датчик, обращенный в сторону от трактора, может считывать линии валка, продолжающиеся под диапазоном углов к центровой линии трактора, и сам может быть обращен под любым диапазоном углов. Кроме того, как отмечено, линии валка не обязательно должны быть прямыми. Таким образом, формулировки учитывают датчики, обращенные под различными углами к направлению поступательного движения трактора.
Кроме того, следует понимать, что ссылки на датчик, обращенный «в боковом направлении от трактора» не исключают устройств, в которых либо (а) присутствует по меньшей мере один дополнительный датчик для считывания линий валка на стороне трактора, противоположной стороне, считываемой упомянутым датчиком; либо (b) упомянутый датчик выполнен с возможностью перемещения так, что он может считывать линии валка по обе стороны трактора.
В варианте осуществления изобретения, один или более датчиков по выбору функционально присоединены к устройству управления, посредством чего по упомянутому датчику считывающему линию валка, который смещен в боковом направлении от направления поступательного движения трактора, устройство управления приводит в действие рулевой механизм трактора, чтобы вызывать управление направлением движения комбинации трактора и пресса-подборщика, так чтобы пресс-подборщик выравнивался для приема внутрь убираемого материала, соответствующего лини валка.
В контексте настоящего документа, ссылки на выравнивание пресса-подборщика для приема внутрь убираемого материала, соответствующего линии валка, например, включают расположение центра передней части подбирающего барабана пресса-подборщика так, чтобы он совпадал с линией валка, или другое управляющее воздействие. В большинстве случаев, любое такое управляющее воздействие имело бы целью оптимизацию приема внутрь убираемого материала некоторым образом, так чтобы кипы формировались как можно эффективнее.
В вариантах осуществления изобретения, по выбору, по меньшей мере один упомянутый датчик является оптическим устройством, которое формирует по меньшей мере один выходной сигнал, получаемый из двухмерного изображения поперечного сечения валка, захваченного оптическим устройством. Такой выходной сигнал изображения может без труда обрабатываться рядом способов, как будет известно специалисту в данной области техники, например, для формирования одного или более видимых или отображаемых изображений; для идентификации конкретных артефактов в данных, собранных датчиком; и/или для передачи, хранения или анализа изображений или данных, относящихся к ним, в любой из многообразия форм. Такие сигналы типично будут электрическими сигналами, хотя они могут принимать другие формы, такие как, но не в качестве ограничения, оптического, акустического или других известных физических сигналов в электромагнитном спектре.
Более того, в вариантах осуществления изобретения, датчик сам по себе не обязательно должен быть оптическим устройством и, взамен, может принимать ряд других форм.
Когда датчик является оптическим устройством, однако, в вариантах осуществления изобретения, он функционально присоединен к процессору, который формирует прогнозированную линию валка, выведенную из множества двухмерных изображений поперечного сечения, силуэта или очертания валка, последовательно захватываемых оптическим устройством при движении трактора.
Как отмечено, такой процессор может формировать часть или быть функционально присоединенным к трактору. В других вариантах осуществления изобретения, процессор может формировать часть или быть функционально присоединенным к прессу-подборщику; или он может быть расположен частично на тракторе, а частично в прессе-подборщике. В кроме того дополнительных вариантах осуществления изобретения, процессор может быть расположен удаленно от местоположения трактора и пресса-подборщика, а датчик может быть присоединен к ним, например, посредством одного или более устройств беспроводного соединения.
В целях исключения неоднозначного толкования, в практических вариантах осуществления изобретения, пресс-подборщик по выбору присоединен к трактору тяговым брусом, который шарнирно присоединен (а) на соединении трактора к трактору и (b) в месте, расположенном на определенном расстоянии вдоль тягового бруса, к месту крепления на прессе-подборщике. В других вариантах осуществления, однако, возможны другие компоновки соединения. Предпочтительно, чтобы сочленение между трактором и прессом-подборщиком давало возможность поворачивания последнего относительно первого; хотя можно придумать компоновки в пределах объема изобретения, в которых пресс-подборщик присоединен к трактору жестко (то есть, без возможности поворачивания).
Изобретение также состоит в способе управления комбинацией подвижного трактора и пресса-подборщика, включающей (а) самодвижущийся трактор, имеющий множество взаимодействующих с землей элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с землей элемента, с тем чтобы вызывать изменения направления движения трактора; (b) пресс-подборщик, который буксируется за трактором по мере того, как трактор движется поступательно, и шарнирно присоединенный к трактору; (с) один или более датчиков для считывания одной или более линий (здесь линий валка) убираемого материала, соответствующих максимальному количеству убираемого материала на единицу длины валка; и (d) устройство управления, которое функционирует в зависимости от по меньшей мере одного выходного сигнала одного или более датчиков, чтобы приводить в действие рулевой механизм трактора, так чтобы пресс-подборщик придерживался упомянутой линии валка некоторым образом, оптимизирующим прием убираемого материала в пресс-подборщик для тюкования, при этом по меньшей мере один упомянутый датчик является по меньшей мере временно функционирующим для считывания линии валка, которая смещена в боковом направлении от направления поступательного движения трактора (здесь - смещенной в боковом направлении линии валка), способ включает побуждение упомянутого датчика считывать смещенную в боковом направлении линию валка, в то время как пресс-подборщик не придерживается линии валка; и использование выходного сигнала упомянутого датчика в качестве входного сигнала в устройство управления, чтобы, тем самым, приводить в действие рулевой механизм, так чтобы выравнивание пресса-подборщика становилось оптимизированным относительно смещенной в боковом направлении линии валка до того, как начинается прием внутрь убираемого материала.
Таким образом, изобретение распространяется на способ эксплуатации устройства, также формирующего часть изобретения, вместе с любыми программами, необходимыми для реализации способа и любыми носителями, на которых, например, могут храниться уместные команды управляющей программы.
В частности, способ по изобретению по выбору является таким, что один или более упомянутых датчиков выполнены с возможностью перемещения между первой ориентацией, в которой они обращены вперед трактора, и второй ориентацией, в которой они обращены в сторону от трактора, способ включает осуществление перемещения упомянутого датчика между первой и второй ориентациями.
Однако, в качестве альтернативы, способ может быть реализован так, чтобы по меньшей мере ориентация второго датчика была постоянной относительно трактора, как пояснено выше в отношении аспектов устройства по изобретению.
Когда один или более упомянутых датчиков выполнены с возможностью перемещения между первой ориентацией, в которой они обращены вперед, и второй ориентацией, в которой они обращены в боковом направлении от трактора, способ может включать установку с возможностью поворачивания по меньшей мере одного упомянутого датчика относительно трактора, так чтобы давать возможность одной или более степеней свободы движения датчика.
В более общем случае, способ по изобретению может быть осуществлен на практике, с тем чтобы воплотить аналоги способа с признаками устройства, описанными в материалах настоящей заявки.
Далее следует описание вариантов осуществления изобретения, в качестве неограничивающего примера, с осуществлением ссылки на прилагаемые чертежи, на которых:
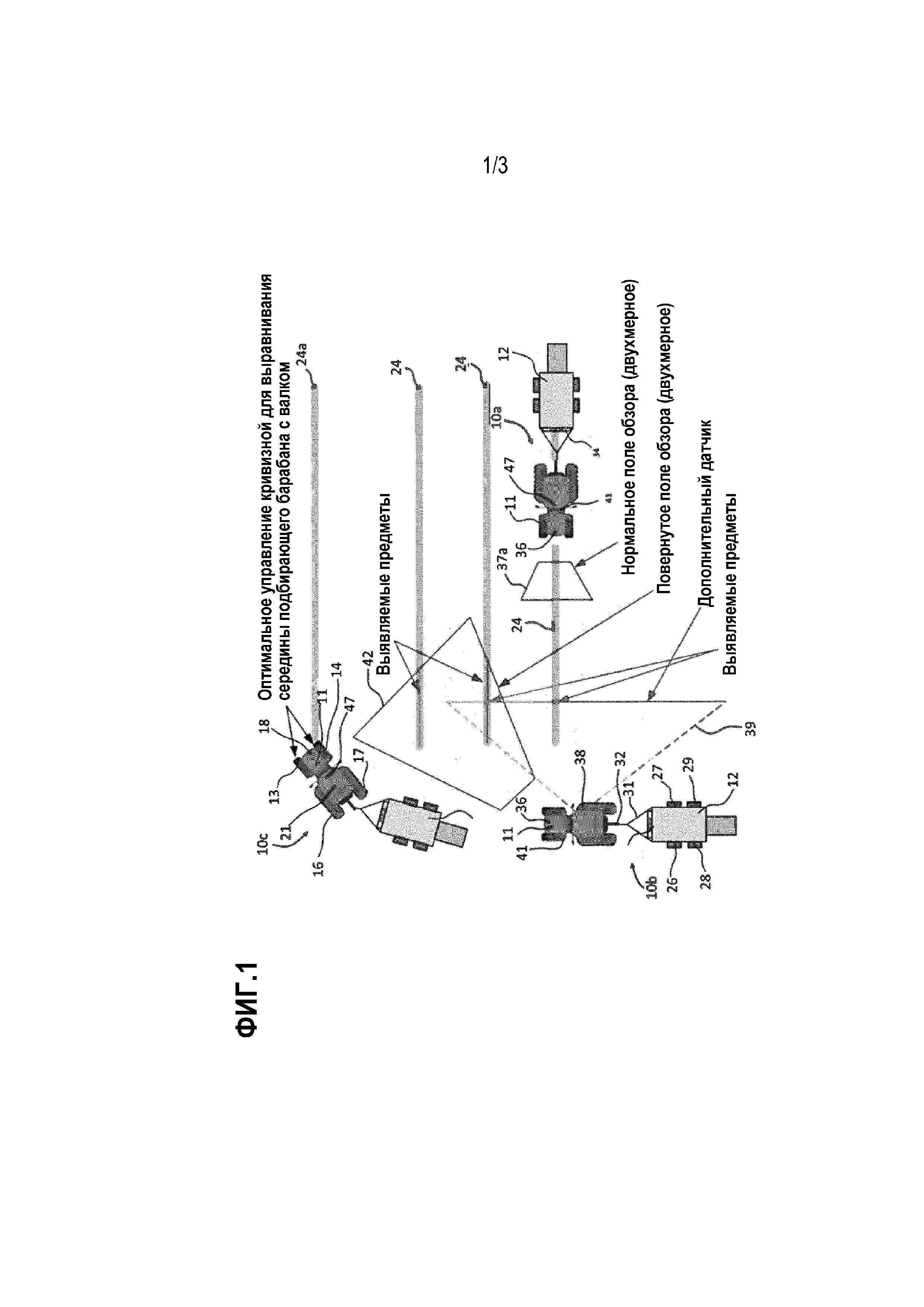
фиг. 1 показывает схематический вид сверху некоторого количества траекторий и расположений комбинации трактора и пресса-подборщика согласно изобретению во время обычной деятельности подбора, тюкования и маневрирования в поворотной полосе; и
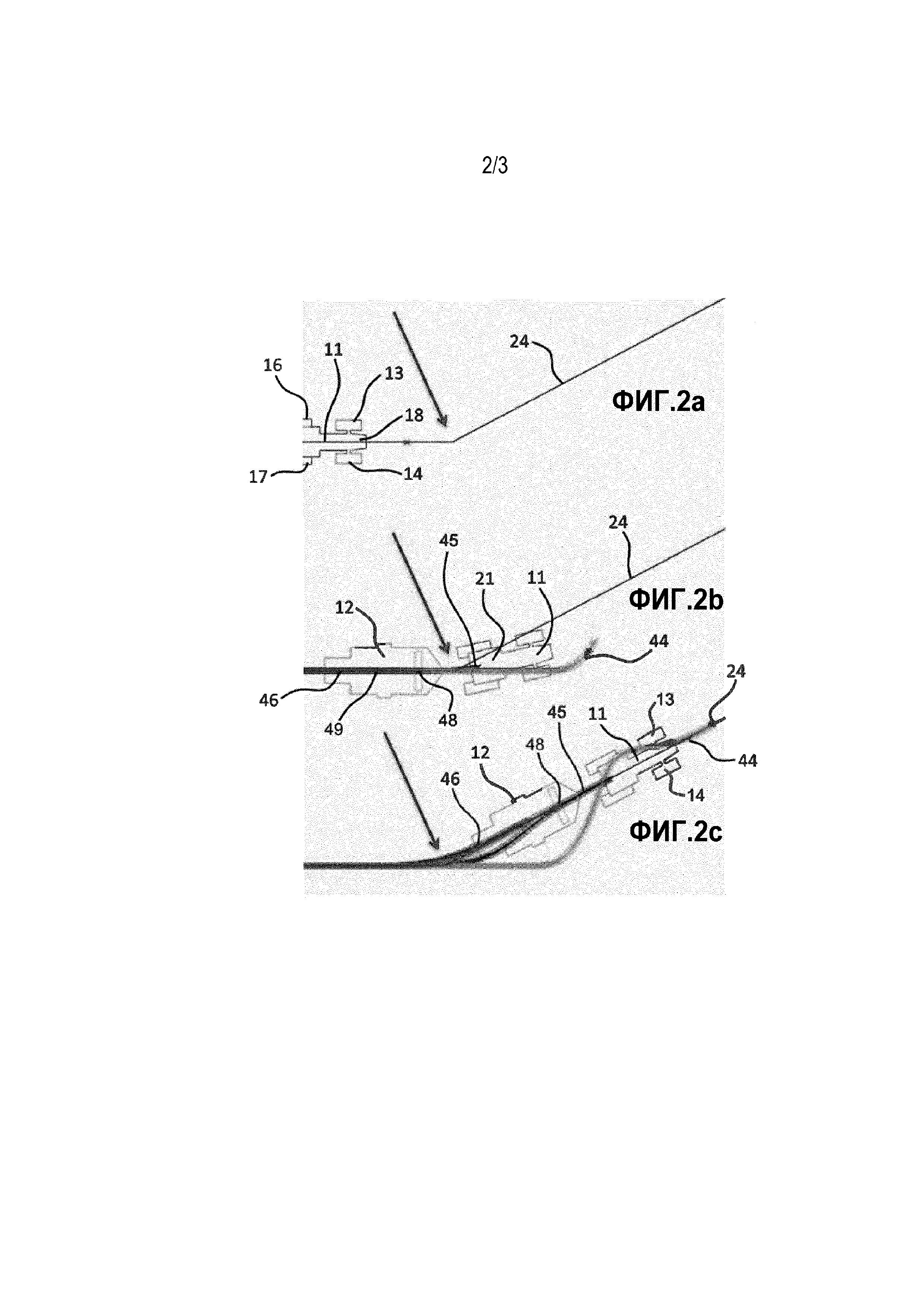
фиг. с 2а по 2с показывают подробнее траекторию трактора и прицепа у комбинации трактора и пресса-подборщика согласно изобретению во время одного конкретного поворота в поворотной полосе; и
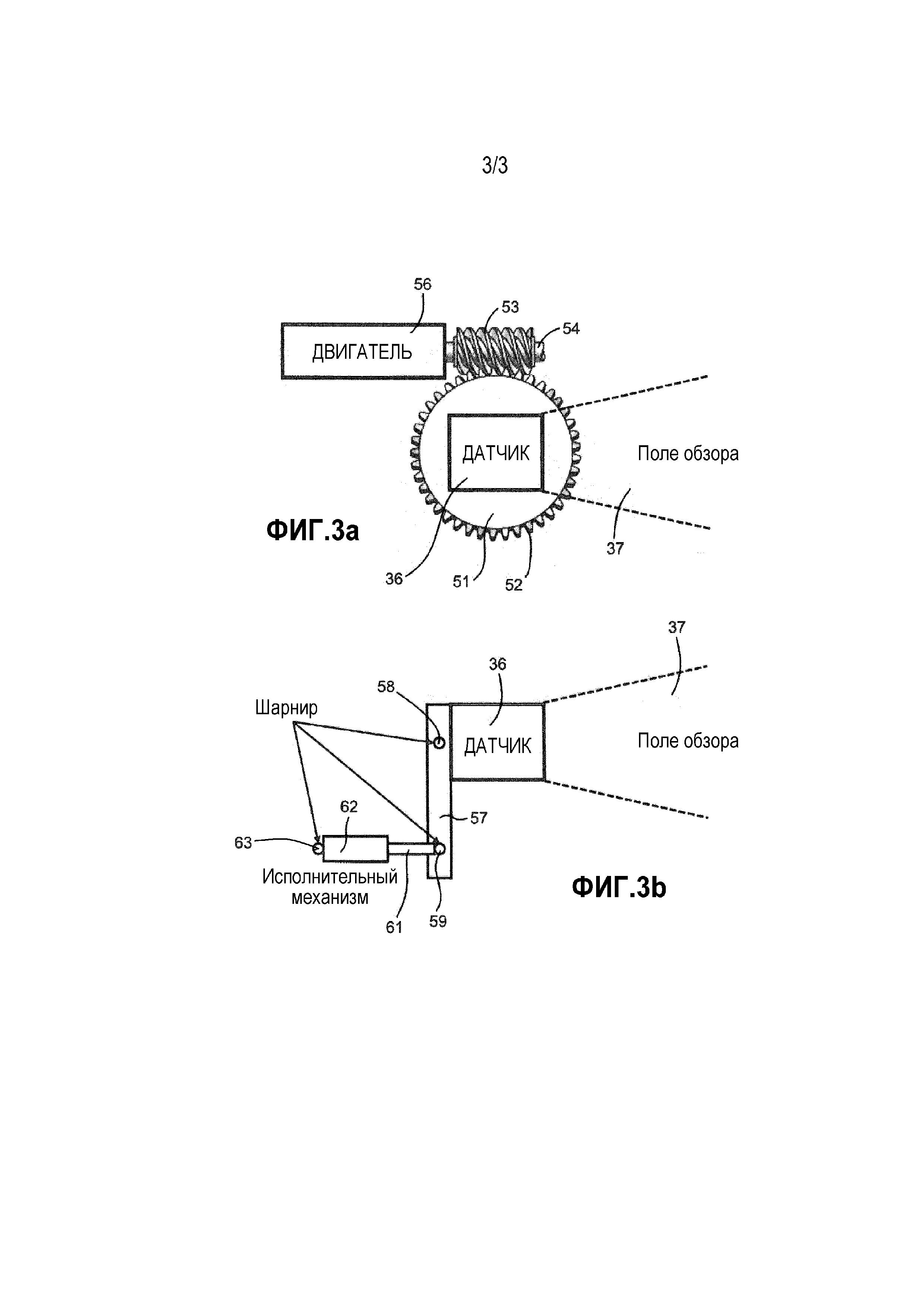
фиг. 3а и 3b показывают примерные компоновки для осуществления поворотной настройки датчика, формирующего часть изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на чертежи, показана комбинация 10 трактора и пресса-подборщика, содержащая сельскохозяйственный трактор 11, который при использовании буксирует пресс-подборщик 12. Трактор 11 во многих аспектах традиционен, а потому, включает поддерживаемые рамой транспортного средства дизельный двигатель, трансмиссию и другие компоненты, которые составляют привод на ведущие колеса вместе четырьмя взаимофункционирующими с землей элементами в виде передней и задней пар левых и правых колес 13, 14, 16, 17 с шинами.
Элементы рамы и привода на ведущие колеса транспортного средства не видимы по причине сокрытия под капотом 18 для двигателя, прикрепленным на верхней стороне передней части подрамника двигателя. На раме транспортного средства позади капота 18 установлена кабина водителя, включающая атмосферозащищенную крышу 21, которая прикреплена поверх ряда застекленных окон, установленных приблизительно в квадратной конфигурации, с тем чтобы обеспечивать хороший обзор с всех сторон вокруг трактора 11.
В показанном примере, привод на ведущие колеса выполнен с возможностью выдавать через одно или более сцеплений, многоскоростную трансмиссию и соответственные ведущие передние и задние полуоси, привод вращения на все четыре колеса 13, 14, 16, 17, но, в других исполнениях трактора в пределах объема изобретения, только задние колеса 16, 17 снабжены механическим приводом для вращения, причем, передние колеса 13, 14 являются свободно вращающимися, как известно в данной области техники.
К тому же, колеса 13, 14, 16, 17 могут быть заменены на непрерывные взаимодействующие с землей гусеницы или бандажи, как известно в некоторых исполнениях тракторов; или таким образом могут быть заменены только задние колеса 16, 17 (или, возможно, только передние колеса 13, 14). Все такие взаимодействующие с землей элементы и другие варианты касательно исполнения взаимодействующего с землей элемента, как будет известно специалисту в данной области техники, находятся в пределах объема изобретения.
Независимо от точной компоновки взаимодействующих с землей элементов, трактор 11 способен к механизированному движению в прямом и, в зависимости от выбранной передачи трансмиссии, обратном направлениях, как широко известно.
Передние колеса 13, 14 управляемы рулем, как лучше всего проиллюстрировано на фиг. 2. С этой целью, трактор 11 включает поворотный узел каждого переднего колеса 13, 14, который предоставляет соответственному колесу 13, 14 возможность поворачиваться вокруг продолжающейся вверх оси. Предусмотрен рулевой механизм, включающий рулевую тягу, картер рулевого механизма, рулевую колонку и рулевое колесо, причем, рулевое колесо расположено в кабине, а рулевая колонка продолжается от рулевого колеса для соединения с картером рулевого механизма.
Такие детали рулевого управления соединены по сути известным образом, для того чтобы обеспечивать возможность рулевого управления передними колесами. Этот аспект рулевого механизма не требует подробного описания в материалах настоящей заявки, поскольку он хорошо известен специалисту в данной области техники. Компоненты системы рулевого управления не видимы на фигурах по причине сокрытия под капотом 18 и крышей 21.
Картер рулевого механизма дополнительно включает двигатель рулевого управления, такой как, но не в качестве ограничения, электродвигатель, который присоединен, чтобы приводить в действие картер рулевого механизма и, тем самым, осуществлять управление направлением движения транспортного средства без необходимости в том, чтобы водитель трактора поворачивал рулевое колесо. Двигатель рулевого управления не видим на фигурах и присоединен к устройству обработки. Оно может быть или может формировать часть процессора или устройства 41 обработки (эти термины в материалах настоящей заявки используются взаимозаменяемо), описанных ниже и формирующих часть или функционально присоединенных к трактору. Другие компоновки устройств обработки для управления традиционными функциями трактора также возможны в пределах объема изобретения и будут приходить на ум специалисту в данной области техники.
Устройство обработки запрограммировано или иным образом выполнено с возможностью вырабатывать команды, которые побуждают двигатель осуществлять действия по управлению направлением движения, например, на основании выходных сигналов одного или более датчиков, также формирующих часть трактора 11. Изобретение полагается на наличие и функционирование конкретных датчиков, как описанные ниже, которые дают начало таким командам рулевого управления.
Как пояснено выше, трактор 11 при использовании буксирует пресс-подборщик 12. Пресс-подборщик 12 включает раму машины, которая скрыта кожухом или кузовом, как лучше всего видно на фиг. 2. Рама, в показанном варианте осуществления, поддерживает две параллельных поперечных балки моста, которые, в свою очередь, определяют расположение левых и правых, передних и задних вращающихся колес 26, 27, 28 и 29.
Пресс-подборщик 12 включает выступающее вперед дышло 31, которое присоединено к (схематически проиллюстрированному) тяговому брусу или аналогичному устройству 32, выступающему назад из трактора 11. Соединение между дышлом 31 и тяговым брусом 32 включает шкворень, дающий прессу-сборщику возможность поворачивать относительно трактора по меньшей мере в плоскости тягового бруса. В некоторых вариантах изобретения, шкворень дает возможность более чем одной степени свободы, тем самым, например, предоставляя возможность соединению между прессом-подборщиком и трактором приспосабливаться к изменениям высоты почвы по мере того, как комбинация трактора и пресса-подборщика движется поступательно. В более простых вариантах, возможна только одна степень свободы поворачивания, так что ориентация пресса-подборщика 12 большей частью в горизонтальной плоскости может настраиваться относительно трактора 11. Многообразие типов присоединения пресса-подборщика 12 к трактору 11 находятся в пределах объема изобретения.
Вал отбора мощности (РТО) также выступает назад из трактора и присоединяется к прессу-подборщику 12. Как широко известно в тракторной технике, вал РТО может передавать привод вращения с двигателя трактора 11 на буксируемое транспортное средство, такое как пресс-подборщик 12, и, в силу этого, выдавать мощность вращения для приведения в действие частей такого транспортного средства.
Как пояснено, крутящий момент и частота вращения вала РТО, например, могут задаваться в результате установки органов управления водителем трактора; в результате команд, сформированных устройством обработки (таким как, но не в качестве ограничения, устройство 41 обработки, упомянутое выше и подробнее описанное ниже); или, в некоторых случаях, в постоянном соотношении с преобладающим числом оборотов двигателя. Когда вал РТО присоединен для оснащения механическим приводом пресса-подборщика, такого как пресс-подборщик 12, предпочтительно, чтобы вал вращался на заданной частоте вращения, которая независима от скорости поступательного движения трактора 11, поскольку изменения частоты вращения вала РТО могли бы вызвать несостоятельные подбор и прессование в кипы сжатых продуктов.
Пресс-подборщик 12 на своей передней нижней кромке включает подбирающий барабан. Подбирающий барабан используется, чтобы вызывать прием сжатых частей растений (то есть, убираемого материала) из валков, таких как валки 24, проиллюстрированные представлениями, вовнутрь пресса-подборщика, где типично вращающиеся компоненты с силовым приводом от вала РТО формуют их в кипы. Кипы выбрасываются из задней части пресса-подборщика 12 на поверхность поля по мере того, как пресс-подборщик протягивается поступательно вдоль валка 24 трактором. Во время такого движения пресса-подборщика, вал РТО может выдавать мощность вращения для оснащения механическим приводом внутренних, формирующих пресс-подборщик частей пресса-подборщика, как известно в данной области техники.
Трактор 11 включает, например, установленный на передней части кабины или в переднем отсеке капота 18 для двигателя, первый датчик 36, который обращен вперед трактора 11, а потому, считывает объекты, местность и другие признаки на пути перед трактором 11 по мере того, как он движется.
Первый датчик 36 может принимать ряд форм, как будет известно специалисту в данной области техники и, в предпочтительных в настоящее время вариантах осуществления изобретения, является оптическим устройством. Таким образом, датчик, например, может быть оптической камерой, такой как, но не в качестве ограничения, прибор с зарядовой связью (ПЗС, CCD), которая формирует электрические выходные сигналы на основании изображения, видимого в поле 37 обзора. Во время нормального использования конкретной комбинации 10 трактора и пресса-подборщика, проиллюстрированное поле 37а обзора определено умозрительной пирамидальной или другой формой поля 37а обзора.
В проиллюстрированном варианте осуществления, поле 37а обзора может быть представлено в виде умозрительной двухмерной плоскости, выступающей вперед из передней части трактора 11, как проиллюстрировано. Однако, следует отметить, что поле 37а обзора по многообразию причин может не принимать проиллюстрированную форму, а взамен может иметь ряд других форм в зависимости от типа датчика 36. Более того, протяженность, на которую поле 37а обзора продолжается вперед от трактора, может быть большей или меньшей, чем площадь, указанная на фигурах. Хотя на фигурах представлено в виде двухмерного поля 37а обзора, в реальности поле обзора является трехмерным, а потому, например, учитывает высоту валка 24, считываемого первым датчиком 36.
Это является следствием предпочтительной формы датчика 36, формирующего постоянное количество пикселей. Таковые распределены равномерно в пирамидальном поле обзора, возникающем из датчика 36. Как результат, существует постоянный угол между всеми смежными пикселями как в горизонтальном, так и в вертикальном направлениях. Отсюда следует, что, для каждого пикселя, строится трехмерная информация, так как определяется расстояние до выявленного объекта. Другими словами, результатом является набор горизонтального и вертикального углов и значения расстояния, приписываемый каждому пикселю, таким образом, давая начало трехмерной информации в отношении каждого пикселя.
Датчик 36, в некоторых вариантах осуществления изобретения, закреплен в неизменной ориентации относительно трактора 11. В таком случае, поле 37а обзора также может быть неподвижным, хотя, в некоторых вариантах осуществления, даже когда положение датчика неподвижно, может быть можно настраивать поле 37а обзора, например, посредством настройки одного или более внутренних компонентов датчика 36; или посредством фильтрации или повышения качества сигналов, сформированных датчиком 36, или обработанных производных таких сигналов, во время использования.
Одно из назначений первого датчика 36 состоит в том, чтобы содействовать оптимизации расположения пресса-подборщика относительно валков 24, в то время как комбинация 10 трактора и пресса-подборщика придерживается валка 24 в целях создания кип.
С этой целью, комбинация 10 трактора и пресса-подборщика включает процессор, схематично проиллюстрированный позицией 41 ссылки.
Процессор 41 показан на фигурах в качестве расположенного полностью в пределах трактора 11, но, как отмечено, он, в вариантах осуществления изобретения, например, может быть расположен в или на прессе-подборщике 12, или он может быть распределен между трактором 11 и прессом-подборщиком 12, или он может быть частично или полностью расположен удаленно от комбинации 10 трактора и пресса-подборщика.
Процессор 41 выполнен с возможностью принимать сигналы, выдаваемые первым датчиком 36, и выводить из них один или более командных сигналов для управления поперечным положением пресса-подборщика 12 относительно трактора 11, в то время как комбинация 10 трактора и пресса-подборщика перемещается вдоль валка 24 во время тюкования.
Присоединение пресса-подборщика 12 к трактору 11, например, может быть поворотным и/или иным образом поперечно смещаемым относительно трактора 11. Комбинация трактора и пресса-подборщика может включать один или более двигателей позиционирования пресса-подборщика, которые, когда введены в действие, побуждают поперечное положение пресса-подборщика 12 настраиваться относительно трактора 11. Командные сигналы, выработанные в процессоре, могут подаваться на двигатель, чтобы осуществлять изменения поперечного относительного положения пресса-подборщика некоторым образом, оптимизирующим прием внутрь убираемого материала.
В большинстве обстоятельств, оптимизация поперечного положения пресса-подборщика 12 относительно трактора 11 будет давать в результате выравнивание центра подбирающего барабана с частью валка 24, которая содержит наивысшую плотность убираемого материала. Это обычно удлиненная центровая линия по валку 24.
Эта ситуация проиллюстрирована со ссылкой на положение 10а комбинации 10 трактора и пресса-подборщика, видимое на фиг. 1 представлений, а также на фиг. 2а. Чтобы добиться требуемой цели оптимизации приема внутрь убираемого материала, двигатель позиционирования пресса-подборщика, действующий по командам, сформированным в процессоре, в свою очередь, на основании выходного сигнала первого датчика 36, по мере надобности корректирует относительное поперечное положение пресса-подборщика 12.
В вариантах осуществления изобретения, трактор 11, в котором поле обзора датчика 36 неподвижно, и в нескольких вариантах осуществления, в которых датчик 36 неподвижен, но поле 37а обзора является настраиваемым посредством настройки внутренних частей датчика 36 или посредством фильтрации его выходных сигналов, как указано, трактор оборудован вторым датчиком 38.
Такой датчик 38 способен считывать профиль валка у по меньшей мере одного валка 24, который смещен в боковом направлении относительно направления поступательного движения трактора 11. Назначение такого второго датчика 38 состоит в том, чтобы выявлять валки 24, когда по меньшей мере трактор 11, а типично вся комбинация 10 трактора и пресса-подборщика, перемещается по поворотной полосе приблизительно под 90 градусов (или другим углом) к направлению, в котором продолжаются валки 24.
Эта ситуация проиллюстрирована на фиг. 1 ориентацией 10b комбинации 10 трактора и пресса-подборщика по существу под 90 градусов к удлиненному направлению валков 24, которая возникает, когда комбинация трактора и пресса-подборщика маневрирует на поворотной полосе поля.
Поле 39 обзора второго датчика 38 проиллюстрировано в виде двухмерной треугольной плоскости, продолжающейся в боковом направлении от трактора 11, как проиллюстрировано. Когда комбинация 10 трактора и пресса-подборщика движется, как представлено позицией 10b, в поворотной полосе, так что валки 24 продолжаются в боковом направлении относительно трактора 11, второй датчик 38 может выявлять валки концом к себе, даже если первый датчик 36 в такой момент времени не ориентирован для выявления валков 24.
Ссылка 10b иллюстрирует поле 39 обзора, продолжающееся по правую сторону от трактора 11, как видно. Второй датчик 38 в вариантах осуществления комбинации 10 трактора и пресса-подборщика вероятно будет неподвижен относительно трактора 11. В результате, в таком варианте осуществления, ориентация поля 39 обзора не может изменяться кроме как, в некоторых вариантах осуществления, посредством настройки внутренних частей датчика и/или фильтрации (или другой обработки сигналов), как упомянуто в отношении датчика 38. В такой ситуации, может быть предусмотрен третий датчик, обращенный в левую сторону от трактора 11 (как видно на фиг. 1). Такой датчик является функционирующим для выявления валков 24, когда валки продолжаются по левую сторону от комбинации 10 трактора и пресса-подборщика. Оставшаяся часть этого описания преимущественно относится к ситуации валков, продолжающихся от трактора 11 по правую сторону, как проиллюстрировано. Это чисто ради легкости пояснения. Функционирование обращенного влево третьего датчика было бы аналогичным функционированию, описанному ниже.
При выявлении валка (такого как валок 24а на фиг. 1), который пригоден для тюкования, второй датчик 38 формирует сигнал (который типично, но не обязательно, является электрическим сигналом). Этот сигнал передается в устройство 41 обработки, которое затем генерирует командный сигнал. Командный сигнал передается на двигатель, описанный выше, который прикреплен к и функционирует на картер рулевого механизма трактора 11. Движущийся трактор 11 затем управляет направлением движения комбинации трактора и пресса-подборщика, как представлено позицией 10с на фиг. 1, оптимальным образом, чтобы оптимально начинать подбор и прессование в кипы выбранного валка 24а.
Оптимизация начала тюкования может происходить, так как пресс-подборщик 12 становится выровненным с наиболее плотной частью валка 24а до того, как начинается прием внутрь убираемого материала, или они могут происходить в результате маневрирования трактора 11, так чтобы пресс-подборщик 12 не отклонялся от оптимальной траектории, как только начались подбор и прессование в кипы. Возможны комбинации таких эффектов.
В других вариантах осуществления изобретения, первый датчик 36 может быть подвижно (типично, но не обязательно, с возможностью поворота) установлен относительно трактора 11, так чтобы он мог поворачиваться, когда комбинация 10 трактора и пресса-подборщика движется в поворотной полосе, как представлено позицией 10b.
Фиг. 3а показывает одну из неограничивающих форм поворотного устройства, в которой датчик 36 установлен на смонтированном с возможностью вращения основании 51. Внешняя периферия основания 51 сформирована в виде зубчатой шестерни, как представлено позицией 52. Зубья шестерни 52 зацепляются червячным приводом 53, сформированным на или прикрепленным к внешней части поворотного вала 54. Вал 54 является выходным элементом двигателя, такого как электродвигатель 56. Двигатель 56 может быть шаговым двигателем или другим типом двигателя и, например, может управляться посредством устройства обработки, формирующего часть трактора 11, чтобы, по мере надобности, вращаться в направлениях по часовой стрелке и против часовой стрелки. Это, в свою очередь, осуществляет требуемую величину управляемого поворота основания 51, а отсюда, датчика 36.
В альтернативном устройстве, для побуждения управляемого поворачивания датчика 36, может быть перенята кинематическая цепь, как показанная на фиг. 3b.
На фиг. 3b датчик 36 показан прикрепленным к монтажному кронштейну 57, который с возможностью поворота, на одном конце 58, например, прикреплен к раме машины трактора 11.
На своем противоположном конце 59, кронштейн 57 прикреплен с возможностью поворота к штоку 61, формирующему часть линейного исполнительного механизма, такого как пневматический или гидравлический плунжер 62. Противоположный конец 63 плунжера 62 с возможностью поворота прикреплен к раме машины. Как результат, выдвигание и втягивание плунжера 62 взывает поворачивание поля 37 обзора датчика 36 вокруг шарнира 58. Как в случае устройства по фиг. 3а, величина поворачивания поля 37 обзора может управляться, например, с использованием устройства обработки, формирующего часть или функционально присоединенного к трактору 11.
В таких вариантах осуществления изобретения, можно обойтись без второго датчика 38. Взамен, когда трактор заезжает в поворотную полосу, так что первый датчик 36 больше не выявляет никаких валков 24, первый датчик может поворачиваться, чтобы быть обращенным в сторону от трактора 11, как представлено повернутым полем 42 обзора.
В такой момент времени, первый датчик затем может брать на себя роль второго датчика 38, описанного выше, по выявлению валков 24, которые пригодны для тюкования. Как результат, первый датчик 36 формирует сигнал (например, электрический сигнал), который проходит в устройство 41 обработки. Устройство 41 обработки формирует командный сигнал, который подается на двигатель картера рулевого механизма и осуществляет управление направлением движения комбинации трактора и пресса-подборщика, например, как представлено позицией 10с на фиг. 1.
Поворачивание первого датчика 36 в таких условиях может происходить многообразием способов. В качестве примера, датчик 36 может поворачиваться слева направо под влиянием двигателя, как только трактор 11 въезжает на поворотную полосу, и датчик 36 перестает выявлять валки 24. Такое сканирование поля может продолжаться до тех пор, пока датчик 36 не выявляет валок (такой как валок 24а) и, как результат, не формирует сигнал валка, как описано.
В качестве альтернативы, поворачивание датчика 36 может осуществляться на основе информации о повороте, описываемом трактором. Таким образом, например, если трактор 11 поворачивает направо при маневрировании на краю поля, датчик может автоматически поворачиваться (скажем) на 30 градусов вправо во время поворота, для того чтобы выравнивать поле 37 обзора датчика 36, так чтобы он вероятно выявлял следующий валок, подлежащий подбору и прессованию в кипы. Подобным образом, датчик 36 может поворачиваться автоматически влево при выявлении поворота налево на краю поля. Величина и направление поворота могут без труда считываться в тракторе, имеющем автоматическую или полуавтоматическую систему рулевого управления, в которой сигналы датчиков, представляющие собой величину поворота двигателя рулевого управления, могут подаваться в устройство обработки.
В многих вариантах осуществления, было бы желательно, чтобы датчик 36 был способен поворачиваться влево или вправо, для того чтобы захватывать изображения или данные, относящиеся к валкам по обе стороны от комбинации трактора и пресса-подборщика. Однако, в качестве альтернативы, в пределах объема изобретения можно предусмотреть соответственный датчик 36, обращенный в ту или другую сторону от трактора. Такие датчики 36 могут быть поворотными или неподвижными в поясненном в материалах настоящей заявки смысле. Можно включить в состав различные комбинации неподвижных и поворотных датчиков на одной и той же комбинации 10 трактора и пресса-подборщика. Как упомянуто ниже, один или более из датчиков могут быть установлены на прессе-подборщике 12 вместо трактора.
На фиг. 1, валки 24 показаны в виде прямых параллельных валков, продолжающихся под приблизительно 90 градусов к продольному размеру поворотной полосы. Однако, может быть так, что валки продолжаются под углом не в 90 градусов к поворотной полосе или по меньшей мере под углом не в 90 градусов к комбинации 10 трактора и пресса-подборщика, когда она маневрирует в поворотной полосе. Однако, изобретение полезно, даже когда дело обстоит именно так.
Фиг. 2а-2с показывают, неограничивающим образом, последовательность перемещений трактора 11 и пресса-подборщика 12, которые могут происходить в результате, когда трактор 11 сначала поворачивает в соответствии со способом по изобретению, для того чтобы выровнять пресс-подборщик с концом валка, как проиллюстрировано позицией 10с на фиг. 1.
На фиг. 2а-2с, центр в боковом направлении датчика 36, соответствующий направлению, в котором обращен датчик 36 (например, камера), представлен позицией 44. Как очевидно по фиг. с 2а по 2с, эта линия прямой видимости может значительно отклоняться от линии 24 валка по мере того, как трактор корректирует свое направление в соответствии со способом по изобретению. Однако, центр заднего моста трактора 11, как представлено позицией 45, придерживается линии, которая значительно меньше отклоняется от линии 24 валка. Центр подбирающего барабана пресса-подборщика представлен позицией 48, а траектория оси пресса-подборщика позицией 46. Как ясно из фиг. с 2а по 2с, траектории последних придерживаются линии 24 валка с очень хорошей точностью, несмотря на то, что (как показано позицией 44) передние колеса 13, 14 трактора часто подруливают, для того чтобы добиться этого результата. Такое управление направлением движения передних колес 13, 14 находится под контролем элементов рулевого управления, как описано в материалах настоящей заявки.
Как пояснено в некоторых вариантах осуществления устройства по изобретению, один или более датчиков 36 выполнены с возможностью перемещения между первой ориентацией, в которой они обращены вперед трактора, и второй ориентацией, в которой они обращены в боковом направлении от трактора. В таких вариантах осуществления, способ по изобретению по выбору может включать этап побуждения перемещения упомянутого датчика между первой и второй ориентациями.
Типично, такое перемещение может происходить под влиянием одного или более двигателей для поворачивания или иного перемещения датчика 36 между первой и второй ориентациями, но, как отмечено в материалах настоящей заявки, другие способы осуществления такого перемещения, в том числе, ручная настройка ориентации датчика, например, с использованием рычагов, рукояток, тяг и/или посредством обхвата рукой установленного с возможностью поворота корпуса датчика 36, возможны в пределах объема изобретения.
Когда способ по изобретению осуществляется на практике по отношению к комбинации 10 трактора и пресса-подборщика, в которой датчики 36, 38 установлены на тракторе неподвижно, устройство 41 обработки может быть запрограммировано или иным образом выполнено с возможностью вызывать управление рулевым механизмом трактора, чтобы находился под влиянием выходного сигнала обращенного в боковом направлении датчика 38, отдавая предпочтение перед обращенным вперед датчиком 36, когда трактор движется в поворотной полосе.
Такое переключение управления с использованием датчиков, например, может инициироваться когда обращенный вперед датчик 36 перестает выявлять валок 24 в конце операции тюкования, влекущей за собой сопровождение такого валка 24. Устройство 41 обработки может быть запрограммировано идентифицировать переход с тюкования к маневрированию в поворотной полосе на основании одного или более ряда факторов, в том числе, например, выходного сигнала датчика 36, продолжительности времени, в течение которого пресс-подборщик принимал внутрь убираемый материал после предыдущего маневра в поворотное полосе, выходного сигнала модуля 47 GPS, формирующего часть трактора 11 или пресса-подборщика 12, или ряда подобных параметров операции тюкования.
В дополнение к вышеизложенному, изобретение считается состоящим в машиночитаемом носителе, содержащем команды для выполнения способа, как определено в материалах настоящей заявки. Такой носитель может быть в виде диска, устройства памяти, такого как так называемый «модуль памяти», внутренних частей компьютера или процессора, такого как устройство 41 обработки или ряда других носителей, как будет известно специалистам в данной области техники.
Изобретение описано в материалах настоящей заявки со ссылкой на оптические датчики, но должно быть принято во внимание, что многообразие других типов датчиков могут без труда использоваться взамен упомянутых оптических датчиков. Такие акустические, радиолокационные, на эффекте Доплера и многообразие других типов датчиков подходят для работы в вариантах осуществления изобретения.
Более того, как указано, датчики, в то время как предпочтительно расположены на тракторе 11, в качестве альтернативы, могут быть расположены на прессе-подборщике 12, или возможна компоновка, например, в которой один датчик, применяемый в изобретении, установлен на тракторе, а другой установлен на прессе-подборщике.
Как упомянуто, трактор 11 может иметь широкое многообразие типов, и изобретение не ограничено использованием или наличием каких бы то ни было конкретных габаритов или исполнения трактора 11. Трактор 11 может включать многочисленные подсистемы и устройства управления. Таковые могут включать модуль GPS или другое устройство определения местоположения. Такое устройство может быть функционально присоединено к устройству 41 обработки, а потому, может выдавать вспомогательные воздействия, которые используются для улучшения точности позиционирования трактора 11 некоторым образом, который оптимизирует выравнивание прицепа 12 описанными в материалах настоящей заявки способами.
Пресс-подборщик 12 также может принимать многообразие форм. Таким образом, пресс-подборщик 12 может включать многочисленные дополнительные части, источники питания, датчики и указывающие местоположение устройства, как будет известно специалисту в данной области техники. К тому же, пресс-подборщик 12 может быть присоединен к трактору любым из ряда способов, как также будет известно в данной области техники. Все такие варианты основного исполнения изобретения, описанного в материалах настоящей заявки, находятся в пределах объема его формулы изобретения, а трактор и пресс-подборщик, проиллюстрированные на фигурах, являются всего лишь примерными и не ограничивают изобретение показанными типами.
Более того, следует отметить, что, например, ссылки на валки 24, являющиеся смещенными в боковом направлении относительно направления поступательного движения трактора 11, также могут быть истолкованы в качестве ссылок на такие валки 24, являющиеся смещенными в поперечном направлении относительно продольной длины трактора 11, когда трактор 11 неподвижен 11, и/или в качестве ссылок на смещение валков относительно направления поступательного движения пресса-подборщика 12 или продольной длины пресса-подборщика 12, когда последний неподвижен.
Такое смещение в боковом направлении валков 24, как упомянуто выше, может происходить до какой-нибудь поддающейся оценке степени. Таким образом, изобретение не ограничено никакой конкретной ориентацией валков 24, которые должны считываться относительно направления поступательного движения трактора 11 и/или пресса-подборщика 12. Более того, хотя в большинстве случаев поле вероятно будет содержать значительное количество валков 24, продолжающихся в целом параллельно друг другу, это не обязательно должно быть именно так. Таким образом, устройство и способ по изобретению, например, применимы на поле, содержащем единственный валок 24, который может быть любой длины и ориентации.
Ради избежания неопределенности, изобретение считается заключенным в программируемом устройстве, как описанное в материалах настоящей заявки; машинно-читаемом носителе, содержащем команды для приведения в действие такого программируемого устройства; и прицепе, таком как пресс-подборщик, как определено в материалах настоящей заявки, когда рассматривается независимо от какого бы то ни было буксирующего трактора.
Перечисление или обсуждение очевидно предшествующего опубликованного документа в данном описании изобретения не обязательно должно восприниматься в качестве подтверждения, что документ является частью уровня техники или представляет собой общедоступные сведения общего характера.
Предпочтения и возможные варианты для данного аспекта, признака или параметра изобретения, если в контексте не указано иное, следует рассматривать в качестве подлежащих раскрытию в комбинации с любыми и всеми предпочтениями и возможными вариантами для всех других аспектов, признаков и параметров изобретения.
Реферат
Группа изобретений относится к сельскому хозяйству. Комбинация подвижного трактора и пресс-подборщика, способ ее управления и машиночитаемый носитель, содержащий команды для осуществления способа управления указанной комбинацией, включающей самодвижущийся трактор, имеющий множество взаимодействующих с землей элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с землей элемента, с тем чтобы вызывать изменения направления движения трактора. За трактором буксируется шарнирно присоединенный к нему пресс-подборщик, когда трактор движется поступательно. Комбинация подвижного трактора и пресс-подборщика содержит один или более датчиков для считывания одной или более линий валка убираемого материала, соответствующих максимальному количеству убираемого материала на единицу длины валка, и устройство управления, которое функционирует в зависимости от по меньшей мере одного выходного сигнала одного или более датчиков, чтобы приводить в действие рулевой механизм трактора с обеспечением придерживания пресс-подборщиком упомянутой линии валка таким образом, чтобы оптимизировать прием убираемого материала в пресс-подборщик для тюкования. Один или более упомянутых датчиков являются по меньшей мере временно функционирующими для считывания линии валка, которая смещена в боковом направлении от направления поступательного движения трактора. По меньшей мере один упомянутый датчик установлен на тракторе. Способ управления комбинацией подвижного трактора и пресс-подборщика, включающей самодвижущийся трактор, имеющий множество взаимодействующих с землей элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с землей элемента, с тем чтобы вызывать изменения направления движения трактора. За трактором буксируется шарнирно присоединенный к нему пресс-подборщик, по мере того как трактор движется поступательно. Для считывания одной или более линий валка убираемого материала, соответствующих максимальному количеству убираемого материала на единицу длины валка, в способе управления комбинацией подвижного трактора и пресс-подборщика предусмотрены один или более датчиков, и устройство управления, которое функционирует в зависимости от по меньшей мере одного выходного сигнала одного или более датчиков, чтобы приводить в действие рулевой механизм трактора с обеспечением придерживания пресс-подборщиком упомянутой линии валка таким образом, чтобы оптимизировать прием убираемого материала в пресс-подборщик для тюкования. По меньшей мере один упомянутый датчик является по меньшей мере временно функционирующим для считывания линии валка, которая смещена в боковом направлении от направления поступательного движения трактора, то есть смещенной в боковом направлении линии валка. Способ включает этапы, на которых побуждают упомянутый датчик считывать смещенную в боковом направлении линию валка, в то время как пресс-подборщик не следует по линии валка, и используют выходной сигнал упомянутого датчика в качестве входного сигнала в устройство управления, чтобы тем самым приводить в действие рулевой механизм, так чтобы выравнивание пресс-подборщика становилось оптимизированным относительно смещенной в боковом направлении линии валка до того, как начинается прием внутрь убираемого материала. Обеспечивается повышение точности оптимизации наполнения пресс-подборщика. 3 н. и 11 з.п. ф-лы, 6 ил.
Комментарии