Система поддержки обзора водителя - RU2636329C2
Код документа: RU2636329C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе поддержки обзора водителя самоходной сельскохозяйственной машины по пункту 1 формулы изобретения и к самоходной сельскохозяйственной машине с такой системой поддержки обзора водителя по пункту 15 формулы изобретения.
Выражение «самоходная сельскохозяйственная машина» следует понимать в широком смысле. Оно охватывает не только все виды тракторов для сельскохозяйственных работ, но также погрузчики с телескопической стрелой или комбайны.
Предшествующий уровень техники
Современные самоходные сельскохозяйственные машины обычно могут использоваться в широком диапазоне применения. Для приспособления сельскохозяйственной машины к выполнению соответствующей задачи конфигурация сельскохозяйственной машины может изменяться путем изменения механического состава сельскохозяйственной машины. Изменение механического состава может производиться, например, путем перемещения частей сельскохозяйственной машины из втянутого в выдвинутое положение. Другая возможность изменения конфигурации сельскохозяйственной машины заключается в ее оснащении различными сменными агрегатами, такими как передний или задний сменный агрегаты. Такими сменными агрегатами могут быть косилки, валкоукладчики, плуги или подобные агрегаты. Сменные агрегаты могут быть выполнены в виде агрегатов на собственных роликовых опорах или могут быть навешены на сельскохозяйственную машину. Соответственно сменный агрегат в данном контексте может быть также прицепом, таким как прицеп-кормораздатчик.
Один из недостатков известных сельскохозяйственных машин заключается в том, что во многих случаях остаются различные слепые зоны, находящиеся за пределами обзора пользователя. Это означает, что пользователь не может видеть препятствия, находящиеся в этих слепых зонах. Это особенно характерно для передней области трактора, который имеет длинную переднюю часть с передней ходовой осью и капотом двигателя, тогда как кабина водителя расположена на тракторе сзади.
Ситуация еще хуже, если сельскохозяйственная машина оснащена различными передними или задними сменными агрегатами, как это показано, например, в патентном документе DE 202011107270 U1. Для этой сельскохозяйственной машины известно обнаружение препятствий с помощью датчиков, таких как камеры. Однако остается нерешенной задача предоставления водителю достаточной информации относительно окружающей обстановки сельскохозяйственной машины для обеспечения безопасной работы.
Раскрытие изобретения
Задачей настоящего изобретения является создание системы поддержки обзора водителя самоходной сельскохозяйственной машины, которая улучшает обзор водителя в отношении окружающей обстановки с учетом возможных изменений в конфигурации сельскохозяйственной машины.
Решение поставленной задачи обеспечивается системой поддержки обзора водителя в соответствии с пунктом 1 формулы изобретения.
Основная изобретательская идея состоит в том, чтобы обеспечить определенную способность адаптации системы поддержки обзора водителя к изменяемой конфигурации сельскохозяйственной машины.
Система поддержки обзора водителя содержит по меньшей мере одну камеру и по меньшей мере одно устройство вывода для вывода водителю сигналов камеры. Выражение «сигнал камеры» следует понимать в широком смысле, то есть он охватывает не только исходные сигналы датчика, но также уже обработанные электронными средствами сигналы, которые подпадают под понятие «информации» по терминологии информационной технологии. Соответственно выражение «сигнал камеры» включает в себя также изобразительную информацию камеры, которая может быть отображена устройством вывода.
Конфигурация системы поддержки обзора водителя выполнена с возможностью адаптации к конфигурации сельскохозяйственной машины посредством изменения расположения и/или направления наблюдения по меньшей мере одной камеры во время нормальной эксплуатации так, что водитель получает сигналы камеры через устройство вывода с по меньшей мере одной камеры, которая направлена по меньшей мере на одну слепую зону.
Возможность адаптации системы поддержки обзора водителя к конфигурации сельскохозяйственной машины позволяет с помощью имеющейся в распоряжении камеры устранять насколько возможно большее число слепых зон. Выражение «устранять» означает, что слепые зоны, которые создаются при соответствующей конфигурации сельскохозяйственной машины, могут отслеживаться соответствующими камерами, направленными на эти слепые зоны так, что пользователь может обнаруживать препятствия или подобные объекты в этих зонах.
Благодаря возможности изменения конфигурации системы поддержки обзора водителя можно добиться значительного устранения слепых зон при небольшом числе требуемых камер.
Важным аспектом предлагаемого решения является концепция установки камеры. Согласно предпочтительному примеру осуществления по пункту 6 формулы изобретения устройство сопряжения камеры содержит по меньшей мере одно приемное устройство для камеры для приема камеры, причем приемное устройство для камеры может быть прикреплено к сельскохозяйственной машине или к сменному агрегату, прикрепленному к сельскохозяйственной машине.
В этом предпочтительном примере осуществления различные приемные устройства для камеры прикреплены к различным местам на сельскохозяйственной машине и/или к сменному агрегату, прикрепленному к сельскохозяйственной машине, так, что имеющиеся камеры могут быть прикреплены к приемным устройствам там, где это нужно для обзора слепых зон, что зависит от конфигурации сельскохозяйственной машины.
Предметом защиты по пункту 13 формулы изобретения является пример осуществления, удобный для пользователя. Здесь предусмотрен блок управления камерами, который распределяет сигналы камеры на различные устройства вывода в зависимости от определенного им расположения соответствующей камеры. Если, например, камера направлена на заднюю часть сельскохозяйственной машины, блок управления камерами может выдавать сигналы камеры на экран дисплея, встроенный в зеркало заднего вида. Однако сигналы с камеры, направленной в сторону от трактора, могут выдаваться блоком управления камерами на дисплей, который является частью терминала управления внутри кабины водителя.
Вторая изобретательская идея по пункту 15 формулы изобретения относится к самоходной сельскохозяйственной машине, главным образом, к трактору с описанной выше системой поддержки обзора водителя. Все пояснения, приведенные в отношении предлагаемой системы поддержки обзора водителя, полностью применимы к предлагаемой самоходной сельскохозяйственной машине в соответствии с указанной второй изобретательской идеей.
Краткий перечень чертежей
Далее изобретение будет пояснено со ссылками на чертежи. На чертежах:
фиг.1 изображает предложенную систему поддержки обзора водителя в установленном положении в соответствии с первой конфигурацией и
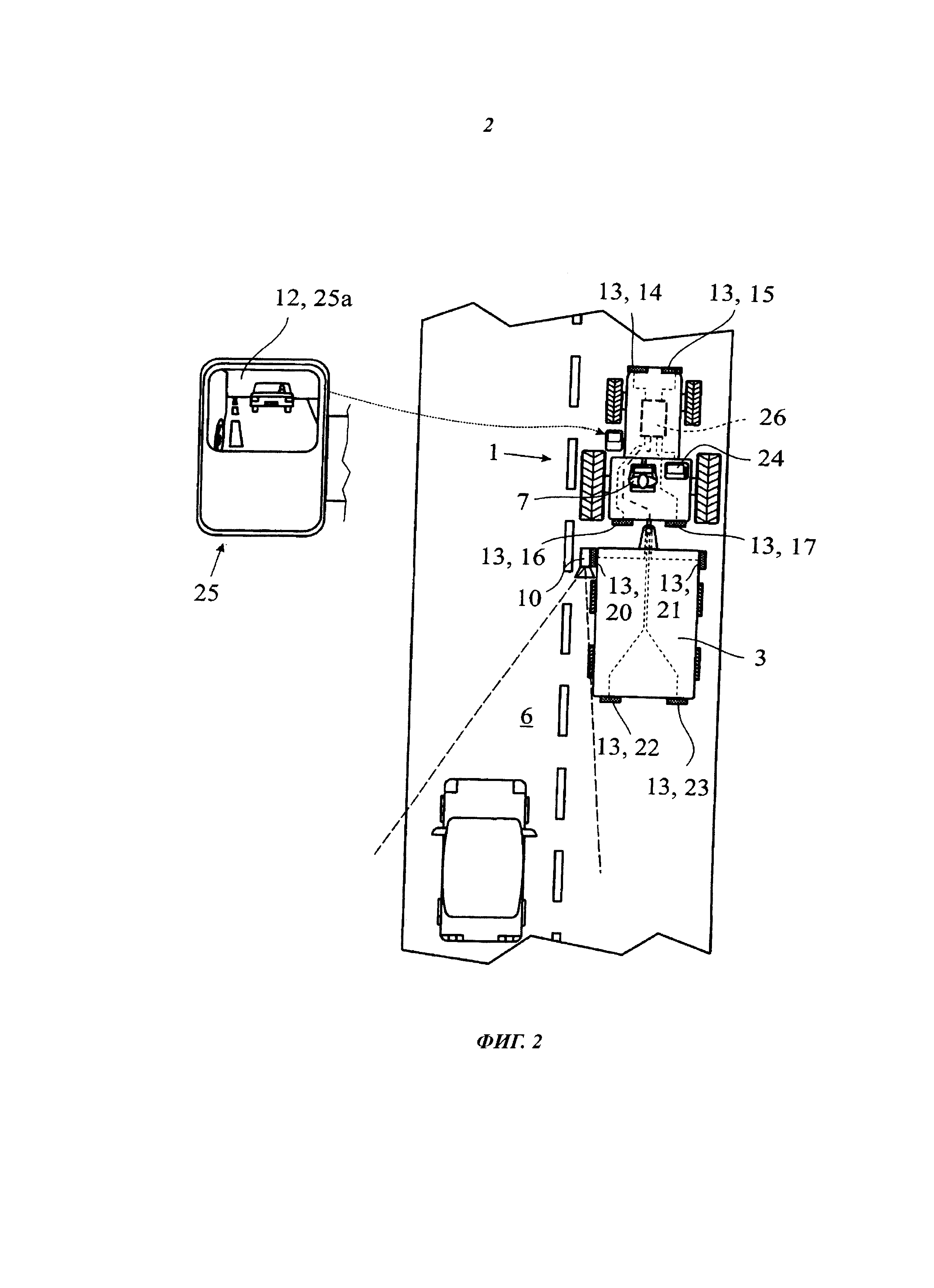
фиг.2 изображает систему поддержки обзора водителя по фиг.1 в соответствии со второй конфигурацией.
Осуществление изобретения
Предлагаемая система поддержки обзора водителя предназначена для самоходной сельскохозяйственной машины 1, которая в предпочтительном примере осуществления показана на чертеже в виде трактора 1. Некоторые возможные альтернативные варианты самоходной сельскохозяйственной машины 1 указаны во вводной части описания.
Сельскохозяйственная машина 1 имеет конфигурацию, которая может быть изменена путем изменения механического состава сельскохозяйственной машины 1. На фиг.1 сельскохозяйственная машина 1 оснащена передним сменным агрегатом 2, который может быть косилкой или другим агрегатом. На фиг.2 сельскохозяйственная машина 1 оснащена прицепом-кормораздатчиком 3, который протягивается сельскохозяйственной машиной 1. В целях полноты следует подчеркнуть, что возможны любые типы конфигураций сельскохозяйственной машины 1. Так, например, сельскохозяйственная машина может быть снабжена задним сменным агрегатом в виде плуга или подобного орудия.
Как можно понять из фиг.1 и 2, в зависимости от конфигурации сельскохозяйственной машины 1 за пределами области обзора водителя 7 могут создаваться различные слепые зоны 4-6.
Для устранения таких слепых зон в указанном выше смысле система поддержки обзора водителя содержит по меньшей мере одну камеру 8-10 и по меньшей мере одно устройство 11, 12 вывода для вывода водителю 7 сигналов камеры.
Конфигурация системы поддержки обзора водителя выполнена адаптируемой к конфигурации сельскохозяйственной машины 1 путем изменения расположения по меньшей мере одной камеры 8-10 в ходе нормальной эксплуатации таким образом, что водитель 7 с помощью устройства 11, 12 вывода получает сигналы камеры с по меньшей мере одной камеры 8-10, которая направлена по меньшей мере на одну слепую зону 4-6.
В показанном на чертеже примере осуществления изменение конфигурации системы поддержки обзора водителя производится путем изменения расположения камер 8-10. Дополнительно или альтернативно может быть предусмотрено, что направление наблюдения по меньшей мере одной камеры 8-10 может быть изменено в ходе нормальной эксплуатации.
На фиг.1 показано, что вследствие конфигурации сельскохозяйственной машины 1 для водителя 7 образованы по меньшей мере две слепые зоны 4, 5. Для устранения этих слепых зон 4, 5 камеры 8, 9 расположены на переднем конце переднего сменного агрегата 2 и направлены в соответствующие стороны от сельскохозяйственной машины 1 в противоположных направлениях. При такой конфигурации системы поддержки обзора водителя слепые зоны 4, 5 эффективно устраняются.
На фиг.2 показана другая конфигурация сельскохозяйственной машины 1, которая приводит к созданию другой слепой зоны 6. Эта слепая зона 6 устраняется камерой 10, направленной назад.
Следует отметить, что две конфигурации системы поддержки обзора водителя по фиг.1 и 2 могут быть реализованы с помощью только двух камер 8, 9. Показанная на фиг.2 камера 10 может быть, например, камерой 8 по фиг.1. Таким образом, понятно, что множество изменений системы поддержки обзора водителя возможны при небольшом числе камер 8-10.
Для осуществления изменяемой конфигурации системы поддержки обзора водителя предусмотрено устройство 13 сопряжения камеры, которое обеспечивает возможность присоединения и отсоединения по меньшей мере одной камеры 8-10 и/или изменение направления наблюдения по меньшей мере одной камеры 8-10 при нормальной эксплуатации.
Предпочтительно устройство 13 сопряжения камеры содержит магнитные крепежные средства для разъемного крепления по меньшей мере одной камеры 8-10 к сельскохозяйственной машине 1 или к сменному агрегату 2. Магнитные крепежные средства недороги и устойчивы к тяжелым рабочим условиям, в том числе к пыльной и/или загрязненной окружающей среде.
Устройство 13 сопряжения камеры содержит также интерфейс передачи данных, который обеспечивает возможность передачи сигнала камеры к соответствующему устройству 11, 12 вывода. Интерфейс передачи данных может быть проводным. Альтернативно интерфейс передачи данных является беспроводным.
В большинстве случаев необходимо, чтобы устройство 13 сопряжения камеры содержало интерфейс электрического питания для подачи напряжения на камеру 8-10. Однако возможно также обойтись без него, если по меньшей мере одна камера 8-10 питается от аккумуляторных батарей.
В предпочтительном примере осуществления устройство 13 сопряжения камеры содержит несколько приемных устройств 14-23 для камеры, которые выполнены с возможностью разъемной установки камеры 8-10. Приемные устройства 14-23 для камеры прикреплены к сельскохозяйственной машине 1 и к сменному агрегату 2, который прикреплен к сельскохозяйственной машине 1 с фиг.1.
Предпочтительно каждое из приемных устройств 14-23 камеры содержит приемный корпус, который может быть прикреплен с возможностью съема к сельскохозяйственноймашине 1 или к сменному агрегату 2, прикрепленному к сельскохозяйственной машине 1. Предпочтительно приемные устройства 14-23 камеры прикреплены к соответствующему компоненту склеиванием, винтами или подобными средствами.
Каждое из приемных устройств 14-23 камеры, здесь и предпочтительно, снабжено магнитными крепежными средствами, как отмечено выше, для установки с возможностью съема по меньшей мере одной камеры 8-10.
Предпочтительно приемные устройства 14-23 камеры обеспечивают не только механическое сопряжение с камерами 8-10, но могут также обеспечивать интерфейс передачи данных и/или интерфейс питания для камер 8-10. Соответственно, когда камера 8-10 прикреплена к приемному устройству 14-23 камеры, устанавливается не только механическое соединение, но также соединение для передачи данных и/или соединение для подачи питания.
Существуют различные возможности реализации устройства 11, 12 вывода. В предпочтительном примере осуществления устройство 11, 12 вывода является устройством визуального вывода. Однако в некоторых случаях применения может быть целесообразно, чтобы устройство 11, 12 было дополнительно или альтернативно акустическим устройством вывода.
Показанные на чертеже устройства 11, 12 вывода являются экранами дисплеев. В легком для реализации примере осуществления экран дисплея является частью отдельного устройства отображения. В примере осуществления по фиг.1 дисплей 24а является компонентом терминала 24 управления, который показывает соответствующие сигналы камеры в определенном режиме управления. Альтернативно может быть предусмотрено, что экран 25а дисплея встроен во внутреннее или наружное зеркало 25 заднего вида. Этот встроенный в наружном зеркале 25 заднего вида дисплей 25а показан на фиг.2 в дополнение к экрану 24а дисплея терминала 24 управления.
Особенно в случае, когда предусмотрено больше одного устройства 11, 12 вывода, может быть целесообразно предусмотреть также блок 26 управления камерами, который получает сигналы камеры и управляет выводом сигналов камеры на устройства 11, 12 вывода. В простейшем случае водитель задает вручную, какие сигналы камеры должны отображаться на каком устройстве 11, 12 вывода. Для этого может быть предусмотрено устройство ручного ввода.
Однако для повышения удобства для пользователя может быть предпочтительно, чтобы блок 26 управления камерами автоматически распределял сигналы камеры на оптимальное устройство 11, 12 вывода. Для этого блок 26 управления камерами должен быть способен определять расположение соответствующих камер 8-10. Этому могут способствовать приемные устройства 14-23 для камеры.
Предпочтительно блок 26 управления камерами может определять расположение камеры 8-10 путем обнаружения того, в каком приемном устройстве 14-23 для камеры действительно установлена камера 8-10. Для этого блок 26 управления камерами может быть соединен со всеми интерфейсами передачи данных всех приемных устройство 14-23 для камеры, что обеспечивает связь со всеми камерами 8-10 при их установке в приемных устройствах 14-23 для камеры. Так, например, простое подтверждение установления связи для передачи данных может производиться, когда соответствующая камера 8-10 прикрепляется к соответствующему приемному устройству 14-23 для камеры. После этого подтверждения установления связи для передачи данных блок 26 управления камерами определяет, какая камера 8-10 установлена в каком приемном устройстве 14-23 для камеры.
В особенно предпочтительном примере осуществления блок 26 управления камерами выдает сигналы камеры 8-10 в зависимости от расположения камеры 8-10, при этом расположение камеры 8-10 определяется блоком 26 управления камерами, как было указано выше.
Далее предпочтительно блок 26 управления камерами распределяет сигналы камеры к различным устройствам 11, 12 в зависимости от определенного им расположения соответствующей камеры 8-10. Это распределение сигналов камеры к различным устройствам 11, 12 вывода осуществляется на основании заранее заданной стратегии распределения, записанной в памяти блока 26 управления камерами.
Так, например, как показано на фиг.1, сигналы камер 8 и 9 отображаются на экране 24а дисплея, являющегося частью терминала 24 управления. Однако сигналы камеры 10, показанной на фиг.2, отображаются на экране 25а дисплея на наружном зеркале 25 заднего вида. Это распределение сигналов камеры к различным устройствам 11, 12 вывода повышает удобство для пользователя системы поддержки обзора водителя.
На фиг.1 показан один аспект изобретения, имеющий самостоятельное значение, заключающееся в том, что единственный экран 24а дисплея используется для отображения сигналов более чем одной камеры 8-10, здесь двух камер 8, 9. Это может быть выполнено с помощью техники разделения экрана, как это показано, путем отображения сигналов камер, здесь соответствующих изображений от камер, рядом друг с другом. Альтернативно возможно отображение сигналов более чем одной камеры 8, 9 на одном экране 24а дисплея последовательно.
Особые преимущества может иметь решение, когда блок 26 управления камерами производит также обработку изображения сигналов камеры, чтобы определять восприятие соответствующей камерой 8-10 объектов заранее заданного класса. Так, например, объект, показанный на фиг.1 в левой части дисплея 24а терминала 24 управления, может определяться на основании обработки изображения как приближающийся автомобиль. Эта информация может быть выдана другим устройством вывода, которое может быть акустическим устройством вывода, как было указано выше.
Согласно другой изобретательской идее заявлена как таковая самоходная сельскохозяйственная машина 1 с описанной выше системой поддержки обзора водителя. К ней относятся все пояснения, приведенные выше в отношении предлагаемой системы поддержки обзора водителя.
Реферат
Изобретение относится к сельскому хозяйству. Предложена система поддержки обзора водителя самоходной сельскохозяйственной машины, которая имеет конфигурацию, изменяемую посредством изменения механического состава сельскохозяйственной машины, и содержащая по меньшей мере одну камеру и по меньшей мере одно устройство вывода для вывода водителю сигналов камеры. При этом конфигурация системы поддержки обзора водителя выполнена с возможностью адаптации к конфигурации сельскохозяйственной машины посредством изменения расположения и/или направления наблюдения по меньшей мере одной камеры во время нормальной эксплуатации так, что водитель получает сигналы камеры через устройство вывода с по меньшей мере одной камеры, которая направлена по меньшей мере на одну слепую зону. Система обеспечивает значительное повышение обзорности водителя. 2 н. и 13 з.п. ф-лы, 2 ил.
Комментарии