Усовершенствованная машина для заготовки фуража - RU2657875C2
Код документа: RU2657875C2
Чертежи
Описание
Изобретение относится к сельскохозяйственной машине для заготовки растений, в частности фуража, причем эта машина выполнена с возможностью перемещения в направлении движения вперед и содержит:
- шасси,
- по меньшей мере одну крепежную штангу, шарнирно соединенную с шасси и выполненную с возможностью перемещения относительно шасси между рабочей конфигурацией, в которой крепежная штанга располагается сбоку относительно шасси, и конфигурацией транспортировки, в которой крепежная штанга сложена таким образом, чтобы уменьшить ее габаритный размер перпендикулярно к направлению А движения вперед,
- по меньшей мере одно рабочее орудие, которое содержит внутренний боковой конец и наружный боковой конец и которое может занимать по меньшей мере одно рабочее положение, в котором рабочее орудие обрабатывает лежащие на земле растения, и по меньшей мере одно другое положение,
- соединительное устройство, через которое рама рабочего орудия соединена с крепежной штангой, причем это соединительное устройство обеспечивает, по меньшей мере когда крепежная штанга находится в рабочей конфигурации, первое перемещение рабочего орудия относительно крепежной штанги, во время которого внутренний боковой конец и наружный боковой конец рабочего орудия перемещаются вертикально относительно крепежной штанги и в одинаковом вертикальном направлении относительно этой крепежной штанги.
Машина этого типа известна из документа US 8186138 В2. Эта машина известна под названием "Merger". Эта машина содержит шасси, выполненное с возможностью соединения с задней частью трактора и опирающееся на землю колесами в своей задней части. По меньшей мере с одной боковой стороной шасси шарнирно соединена крепежная штанга, несущая рабочее орудие. Эта крепежная штанга может находиться в рабочей конфигурации, в которой рабочее орудие расположено перпендикулярно к направлению движения вперед и по существу горизонтально. Рабочее орудие содержит ротор с зубьями, который во время работы расположен перпендикулярно к направлению движения вперед и собирает лежащие на земле растения. Ротор перемещает собираемые растения назад в направлении ленточного конвейера, который перемещает растения перпендикулярно к направлению движения вперед в направлении боковой стороны рабочего орудия. На известной машине рабочее орудие соединено в своей задней части с кронштейном при помощи оси, ориентированной горизонтально и параллельно направлению движения, когда крепежная штанга находится в рабочей конфигурации. В свою очередь, этот кронштейн соединен с крепежной штангой при помощи первой тяги и второй тяги, расположенной под первой тягой. Первая тяга шарнирно соединена каждым из своих концов с крепежной штангой и с кронштейном при помощи соответствующих физических осей, которые ориентированы горизонтально и поперечно к направлению движения, когда крепежная штанга находится в рабочей конфигурации. Благодаря такой конструкции, первая и вторая тяги могут перемещаться вертикально относительно крепежной штанги в рабочей конфигурации, поэтому рабочее орудие может полностью перемещаться вверх или вниз, чтобы следовать неровностям профиля поля. Однако это перемещение является только вертикальным. Когда крепежная штанга находится в рабочей конфигурации, расстояние, измеряемое горизонтально и перпендикулярно к направлению движения вперед и отделяющее рабочее орудие от шасси, остается постоянным. Во время заготовки скошенные растения могут быть уложены в валки, ширина и промежутки между которыми меняются в зависимости от машин, используемых для кошения и/или укладки в валки. В случае использования известной машины трактор и машина перекрывают первый валок, поэтому первый валок проходит между колесами трактора и между колесами машины, и рабочее орудие подбирает второй валок, параллельный первому валку и находящийся с одной боковой стороны трактора. Машина укладывает этот второй валок сверху или вдоль первого валка или же сверху или вдоль третьего валка, параллельного второму валку и находящегося на большем расстоянии от первого валка. В подобном случае использования траектория трактора и машины вытекает из того, что их соответствующие колеса не должны приминать первый валок. Следовательно, в зависимости от ширины второго валка и от расстояния, которое отделяет его от первого валка, рабочее орудие может подбирать этот второй валок лишь частично. Таким образом, это рабочее орудие оставляет не собранной часть второго валка. Следовательно, для полного сгребания второго валка требуется дополнительный проход машины, что приводит к увеличению времени нахождения в поле и эксплуатационных расходов и к снижению производительности. Кроме того, разделение второго валка на две части рабочим орудием может привести к скапливанию растений внутри рабочего орудия. Кроме того, невозможно изменить способ укладки второго валка сверху или вдоль первого или третьего валка, так как он обусловлен расстоянием, отделяющим рабочее орудие от шасси, колеса которого перекрывают первый валок. Следовательно, форма нового валка, получаемого при объединении второго валка и первого или третьего валка, не всегда является оптимальной в зависимости от природы растений и от текущих метеорологических условий. Наконец, известная машина не позволяет изменять поперечное положение рабочего орудия относительно трактора. Следовательно, во время работы невозможно регулировать общую ширину комплекса трактор-машина.
Другая машина, известная из документа WO 2011/112077, соответствует ограничительной части пункта 1 формулы изобретения. На этой машине рабочее орудие соединено с соответствующей крепежной штангой при помощи соединительного устройства, содержащего первую штангу и вторую штангу. Первая штанга расположена по существу в направлении движения вперед между первой вертикальной шарнирной осью и крепежной штангой. На конце первой штанги, удаленном от первой оси, установлена вторая штанга при помощи второй шарнирной оси, проходящей по существу в направлении движения. Эта вторая штанга расположена поперечно к направлению движения, и на ее конце, удаленном от второй оси, установлена рама соответствующего рабочего орудия. При повороте второй штанги вокруг второй оси рабочее орудие может перемещаться вертикально. Кроме того, вторая штанга является телескопической и обеспечивает поперечное перемещение рабочего орудия. Это соединительное устройство является сложным и громоздким из-за наличия первой и второй штанги, расположенных в разных соответствующих направлениях. В частности, телескопическая конструкция второй штанги является сложной и дорогой. Наконец, во время работы вторая шарнирная ось повергается воздействию значительных механических напряжений. Они связаны, с одной стороны, с вертикальным движением второй штанги относительно первой. С другой стороны, усилия, которыми растения, перемещаемые машиной, движущейся по полю, действуют на рабочее орудие, создают момент кручения вокруг вертикальной оси, проходящей через вторую шарнирную ось. Этот момент является большим по причине большой длины второй штанги, направленной поперечно, что может привести к быстрому износу второй оси.
Настоящее изобретение призвано предложить сельскохозяйственную машину для заготовки фуража, которая не имеет вышеупомянутых недостатков.
В связи с этим изобретение отличается тем, что соединительное устройство содержит по меньшей мере одну штангу, ориентированную в основном в направлении движения, когда крепежная штанга находится в рабочей конфигурации, тем, что эта штанга шарнирно соединена с крепежной штангой вокруг первой оси, которая ориентирована поперечно к направлению движения вперед и по существу горизонтально, когда крепежная штанга находится в рабочей конфигурации, и тем, что за счет поворота вокруг этой первой оси эта штанга может перемещаться вертикально относительно крепежной штанги в рабочей конфигурации, что позволяет рабочему орудию перемещаться вертикально относительно указанной крепежной штанги.
Благодаря средствам, которыми оснащено соединительное устройство, расстояние, измеряемое горизонтально и перпендикулярно к направлению движения вперед и отделяющее рабочее орудие от шасси, можно регулировать в зависимости от различных условий работы. Так, можно изменять поперечное расположение рабочего орудия относительно трактора. Кроме того, можно регулировать общую ширину комплекса трактор-машина во время работы. За счет поперечного перемещения рабочего орудия относительно крепежной штанги средства позволяют легко корректировать расстояние относительно крепежной штанги, на котором собираемые рабочим орудием растения укладываются машиной на землю, в частности, в виде валка. Рабочее орудие машины в соответствии с изобретением может быть предназначено, в частности, для укладки растений в валки на земле. В этом случае, если трактор перекрывает первый валок, который проходит между его колес, средства позволяют перемещать рабочее орудие поперечно на соответствующее расстояние от шасси, чтобы подбирать полностью и за один раз второй валок, находящийся с боковой стороны трактора. Кроме того, машина может оптимально укладывать этот второй валок сверху или вдоль первого валка или же сверху или вдоль третьего валка, расположенного на большем расстоянии от трактора, чтобы получить новый валок большего объема. Следовательно, средства позволяют корректировать ширину, высоту и общую форму этого нового валка в зависимости от природы растений, от метеорологических условий и от рабочей мощности пресса или сеноуборочного механизма, используемых в дальнейшем для подбора этого нового валка. В целом, средства обеспечивают легкое регулирование поперечного перекрывания между рабочей шириной, с одной стороны, рабочего орудия машины в соответствии с изобретением, соединенной с задней частью трактора, с другой стороны, рабочего блока, расположенного спереди трактора. Разумеется, это преимущество относится к рабочему орудию и к рабочему блоку вышеупомянутого типа, а также к рабочему орудию и к рабочему блоку, предназначенным для кошения растений. Кроме того, поскольку средства позволяют осуществлять второе перемещение независимо от первого вертикального перемещения рабочего орудия относительно крепежной штанги, соединительное устройство в соответствии с изобретением позволяет рабочему орудию точно следовать профилю поля при любом поперечном положении рабочего орудия относительно шасси. Предпочтительно следование профилю поля обеспечивается первым вертикальным перемещением рабочего орудия относительно крепежной штанги. Во время этого первого перемещения крепежная штанга может оставаться неподвижной или по существу неподвижной, поэтому подвешенные массы, находящиеся в движении во время первого перемещения, предпочтительно ограничены соответствующими массами рабочего орудия и соединительного устройства. Наконец, поскольку соединительное устройство объединяет в себе функции вертикального перемещения и поперечного перемещения рабочего орудия относительно крепежной штанги, это позволяет упростить и облегчить технические средства для шарнирного соединения крепежной штанги с шасси и для обеспечения перемещений крепежной штанги относительно шасси. В частности, крепежная штанга может оставаться неподвижной или по существу неподвижной относительно шасси, когда эта крепежная штанга находится в рабочей конфигурации. Кроме того, крепежную штангу можно упростить и облегчить посредством ее выполнения в виде единой детали, которая не включает в себя шарнирных и/или телескопических соединений.
За счет того, что устройство соединения рамы рабочего орудия с крепежной штангой содержит штангу, ориентированную в основном в направлении движения, когда крепежная штанга находится в рабочей конфигурации, соединительное устройство в соответствии с изобретением может оставаться компактным и легким. Эта компактность сочетается с хорошим следованием профилю поля, так как во время работы штанга может перемещаться вертикально относительно крепежной штанги вокруг первой поперечной и по существу горизонтальной оси, при помощи которой штанга шарнирно соединена с крепежной штангой. Продольная ориентация штанги и поперечная ориентация первой оси позволяют этим элементам выдерживать продольные усилия, которыми растения действуют на рабочее орудие. Таким образом, соединительное устройство в соответствии с изобретением, соединяющее раму рабочего орудия с крепежной штангой, отличается увеличенным сроком службы.
Согласно предпочтительному отличительному признаку изобретения, средства содержат первый привод, который позволяет перемещать рабочее орудие относительно крепежной штанги поперечно к направлению движения вперед между первым поперечным положением относительно крепежной штанги, в котором внутренний боковой конец рабочего орудия приближен к первой центральной вертикальной плоскости шасси, и вторым поперечным положением относительно крепежной штанги, в котором этот внутренний боковой конец удален от этой первой центральной вертикальной плоскости. В первом поперечном положении рабочего орудия ширина машины уменьшается. Если машина является машиной, прицепленной сзади трактора, внутренний боковой конец рабочего орудия, находящегося в этом первом поперечном положении, расположен в продолжении задней колесной оси трактора. При этом рабочее орудие может обрабатывать растения, лежащие на земле и находящиеся сзади трактора. В случае рабочего орудия, предназначенного для укладки растений в валки, рабочее орудие может подбирать валок, проходящий между колесами трактора, и перемещать его, например, в направлении наружного бокового конца рабочего орудия. Во втором поперечном положении рабочего орудия внутренний боковой конец находится, например, по существу в продолжении заднего колеса трактора, находящегося с той же стороны, с какой рабочее орудие расположено относительно шасси машины. Таким образом, это орудие может обрабатывать растения, находящиеся с этой стороны трактора независимо от того, предназначено рабочее орудие для укладки в валки или для кошения растений. В частности, в случае рабочего орудия, предназначенного для укладки растений в валки, оно может подбирать боковой валок, расположенный с этой стороны трактора, чтобы укладывать его в виде валка, например, более или менее в центре машины. В этом втором поперечном положении рабочее орудие, предназначенное для кошения, может скашивать растения, находящиеся с указанной стороны трактора и укладывать их в боковой валок, более или менее центральный относительно машины. Во втором поперечном положении рабочее орудие может характеризоваться некоторым перекрыванием с рабочим блоком, находящимся спереди трактора.
Согласно предпочтительному отличительному признаку изобретения, машина содержит два рабочих орудия, каждое из которых шарнирно соединено с шасси при помощи соответствующей крепежной штанги, находящейся с соответствующей стороны от шасси. Таким образом, средства перемещения каждого рабочего орудия позволяют регулировать общую рабочую ширину машины. Кроме того, средства позволяют более или менее отодвигать эти рабочие орудия друг от друга с целью коррекции ширины валка, формируемого в центре машины по меньшей мере одним из этих рабочих орудий. Кроме того, средства позволяют регулировать перекрывание между соответствующими ширинами рабочих орудий машины в соответствии с изобретением, прицепленной сзади трактора, и рабочей шириной рабочего блока, находящегося спереди трактора.
Согласно другому предпочтительному отличительному признаку изобретения, когда каждая крепежная штанга находится в своей соответствующей рабочей конфигурации и по меньшей мере одно из рабочих орудий находится во втором поперечном положении относительно соответствующей крепежной штанги, внутренние боковые концы этих рабочих орудий значительно отодвинуты друг от друга перпендикулярно к направлению А движения вперед, и, когда каждая крепежная штанга находится в своей соответствующей рабочей конфигурации и каждое рабочее орудие находится в первом поперечном положении относительно соответствующей крепежной штанги, внутренние боковые концы этих рабочих орудий находятся рядом друг с другом. Первое поперечное положение позволяет машине влиять на непрерывную ширину обработки растений. Таким образом, рабочие орудия, предназначенные для укладки валков, могут подбирать растения по непрерывной ширине, например, скошенные или высушенные растения, лежащие на земле, и укладывать их в валок с левой или правой стороны машины. Второе поперечное положение позволяет каждому рабочему орудию обрабатывать растения, распределенные слева или справа от машины. Таким образом, рабочие орудия, предназначенные для укладки в валки, позволяют формировать центральный валок, укладываемый между двумя рабочими орудиями, из растений, подбираемых каждым соответствующим рабочим орудием, например, из двух боковых валков, каждый из которых подбирает соответствующее рабочее орудие.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания неограничивающего варианта осуществления заявленной машины со ссылками на прилагаемые чертежи.
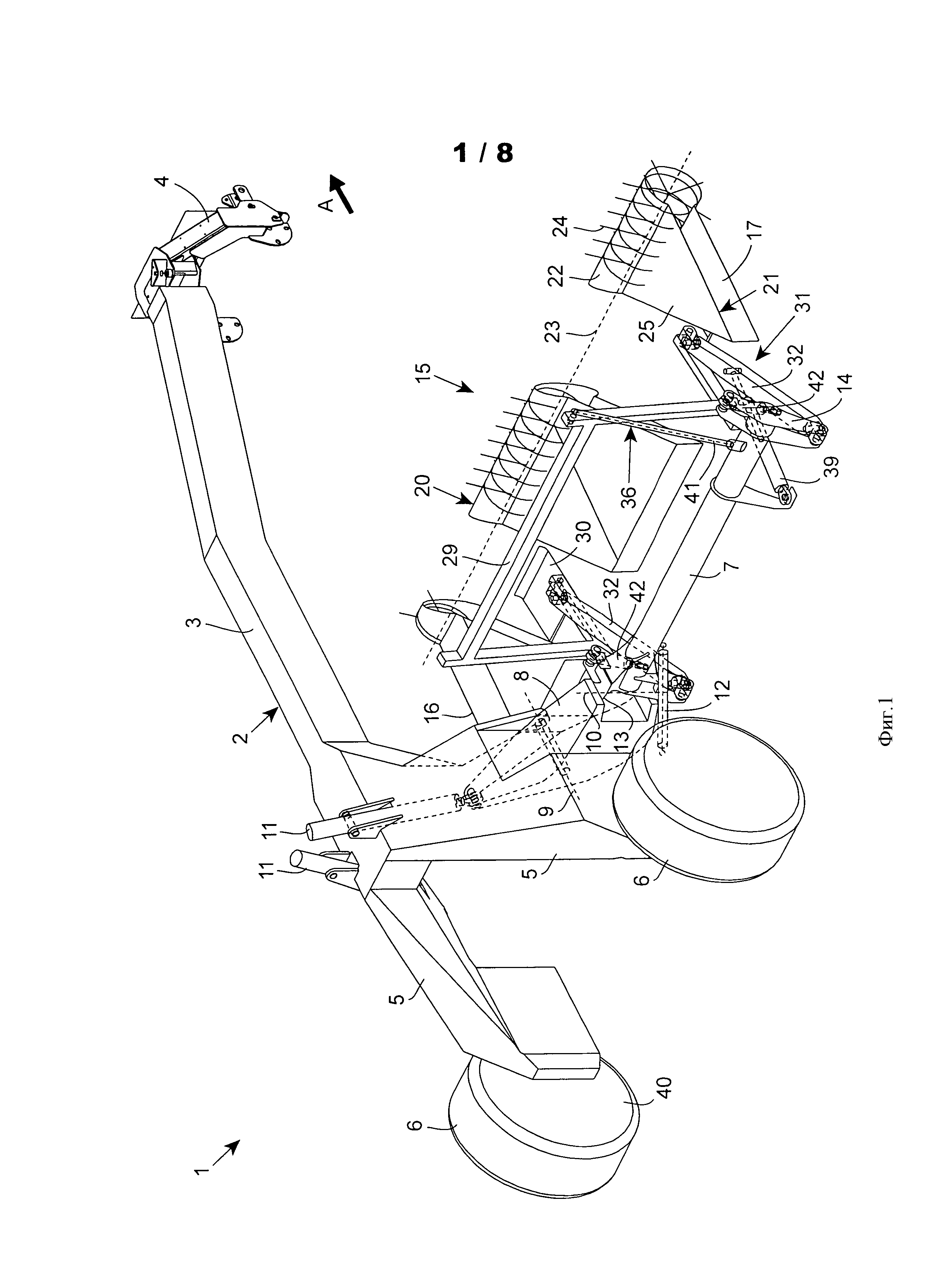
На фиг. 1 показан вариант осуществления машины в соответствии с изобретением, частичный вид в перспективе с несколькими частичными разрезами;
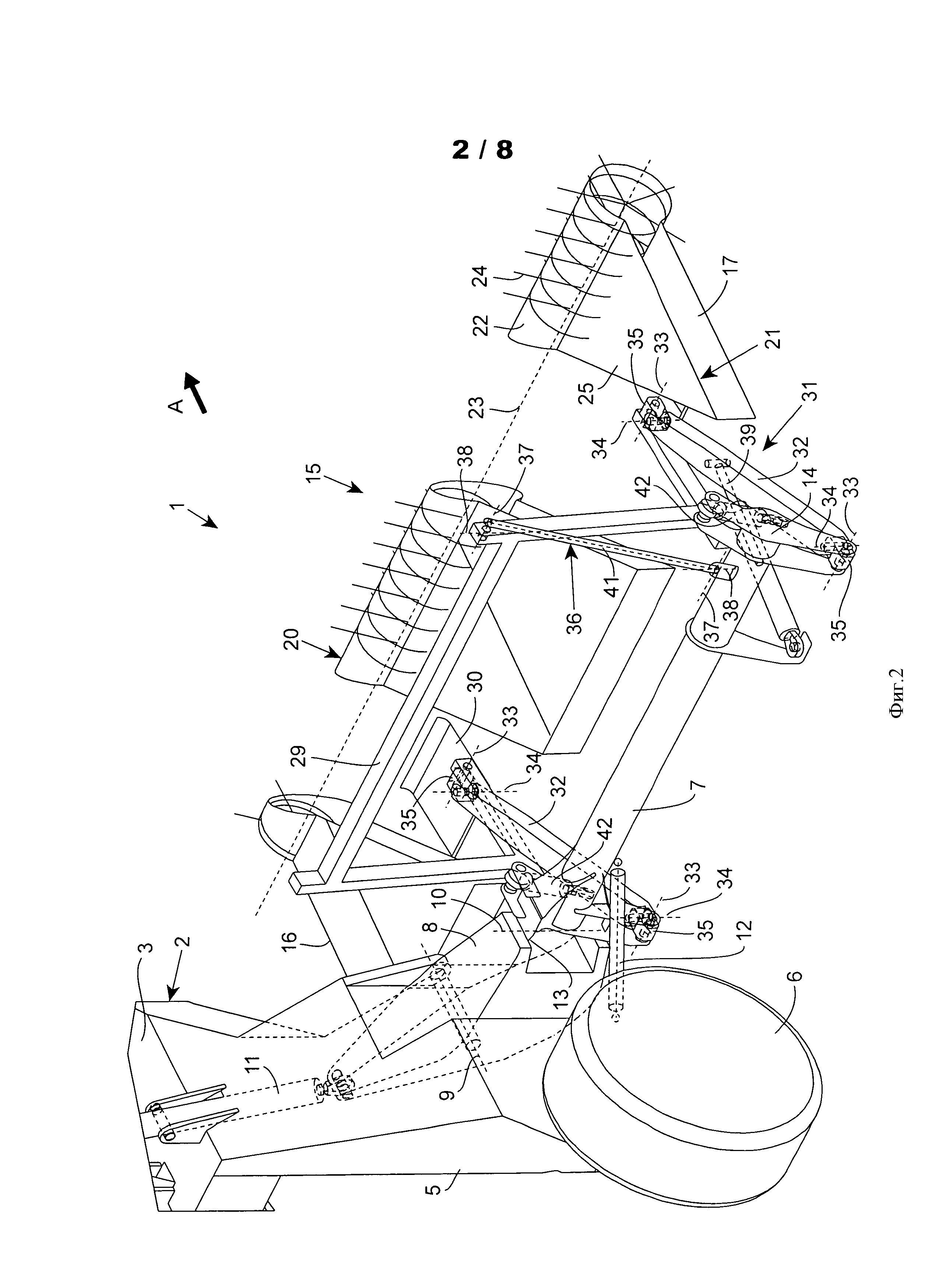
на фиг. 2 - то же, что на фиг. 1, увеличенный вид;
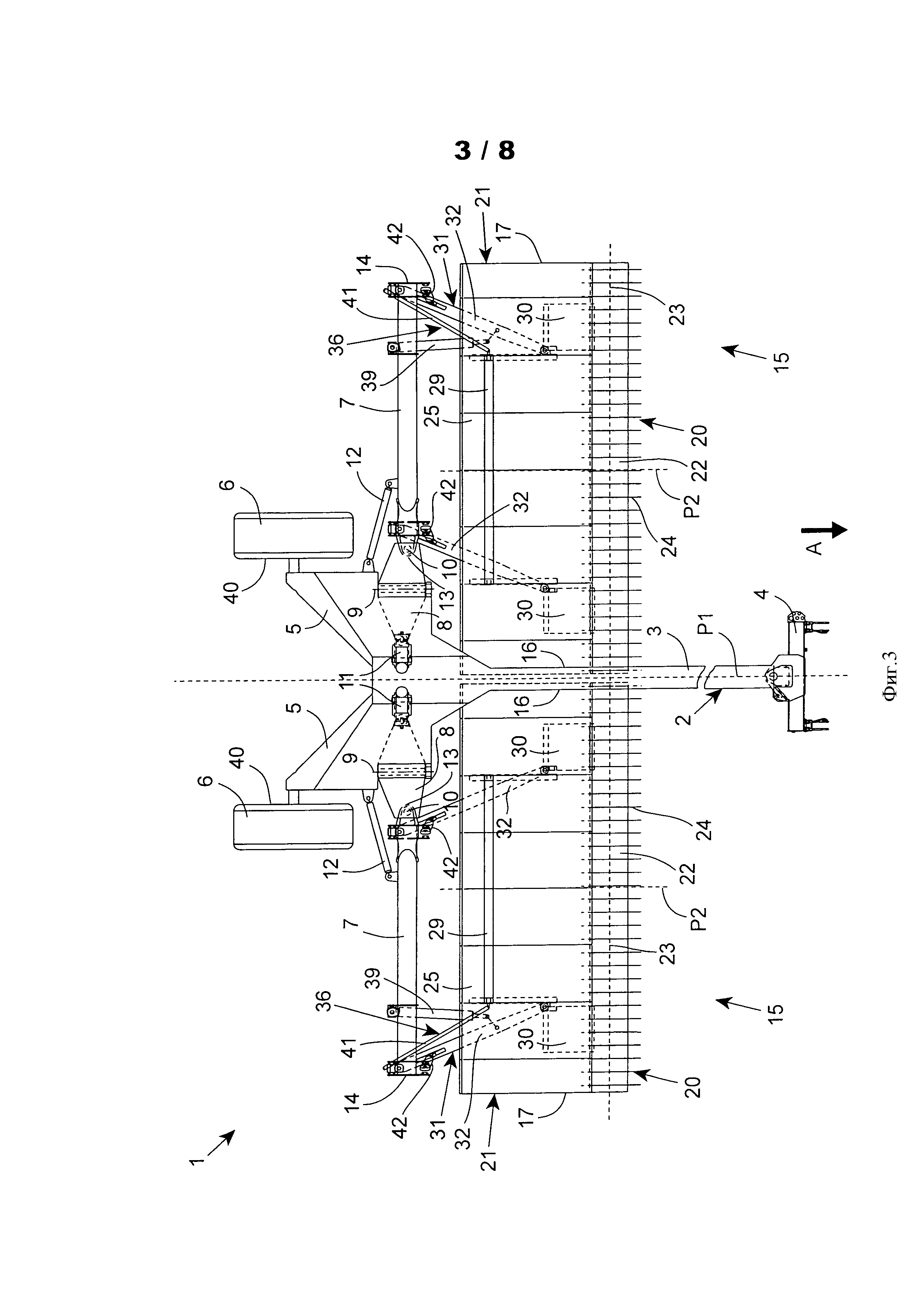
на фиг. 3 показан вариант осуществления машины, изображенной на фиг. 1, вид сверху с несколькими частичными разрезами;
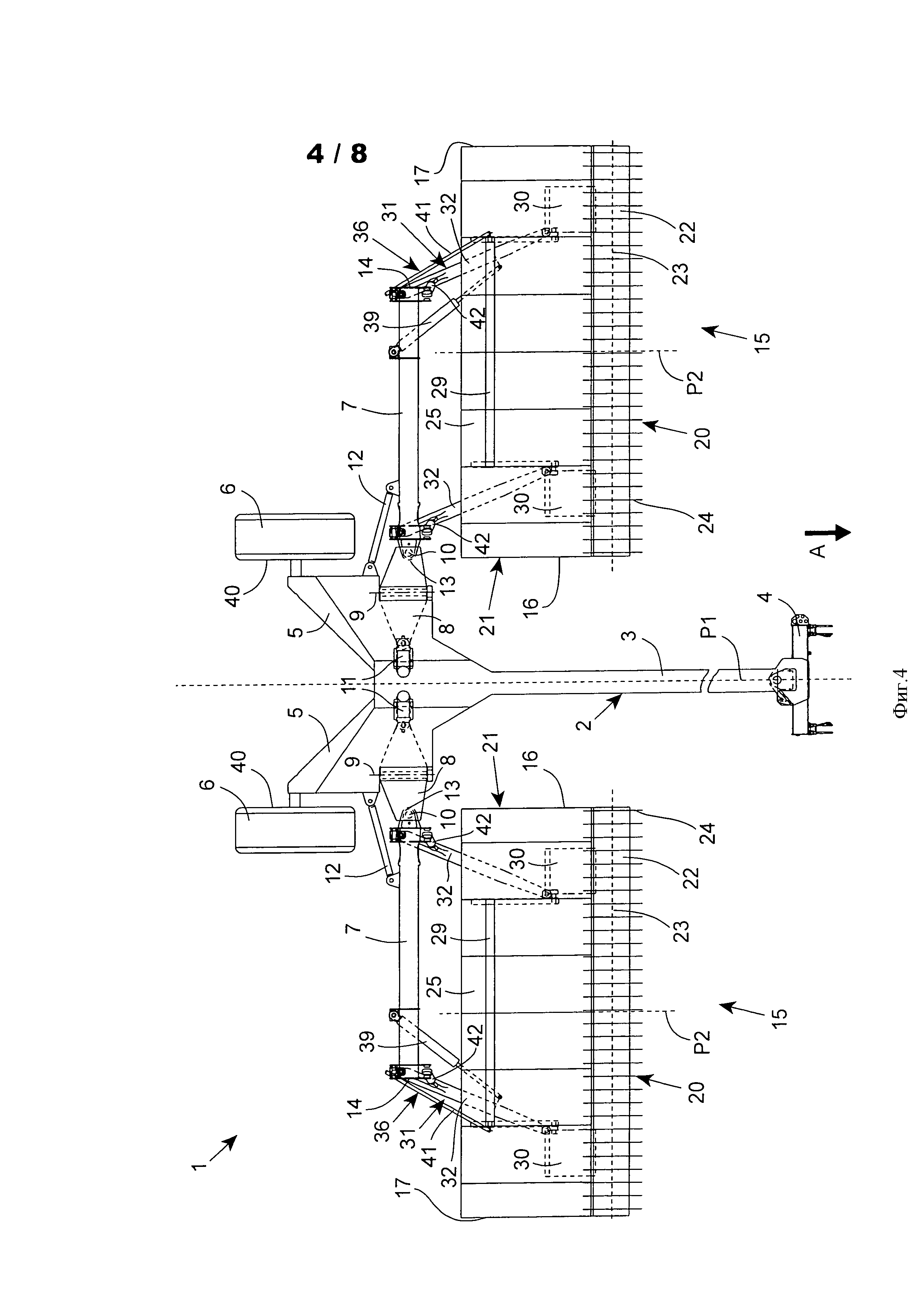
на фиг. 4 показан вариант осуществления машины, изображенной на фиг. 1, вид сверху с несколькими частичными разрезами;
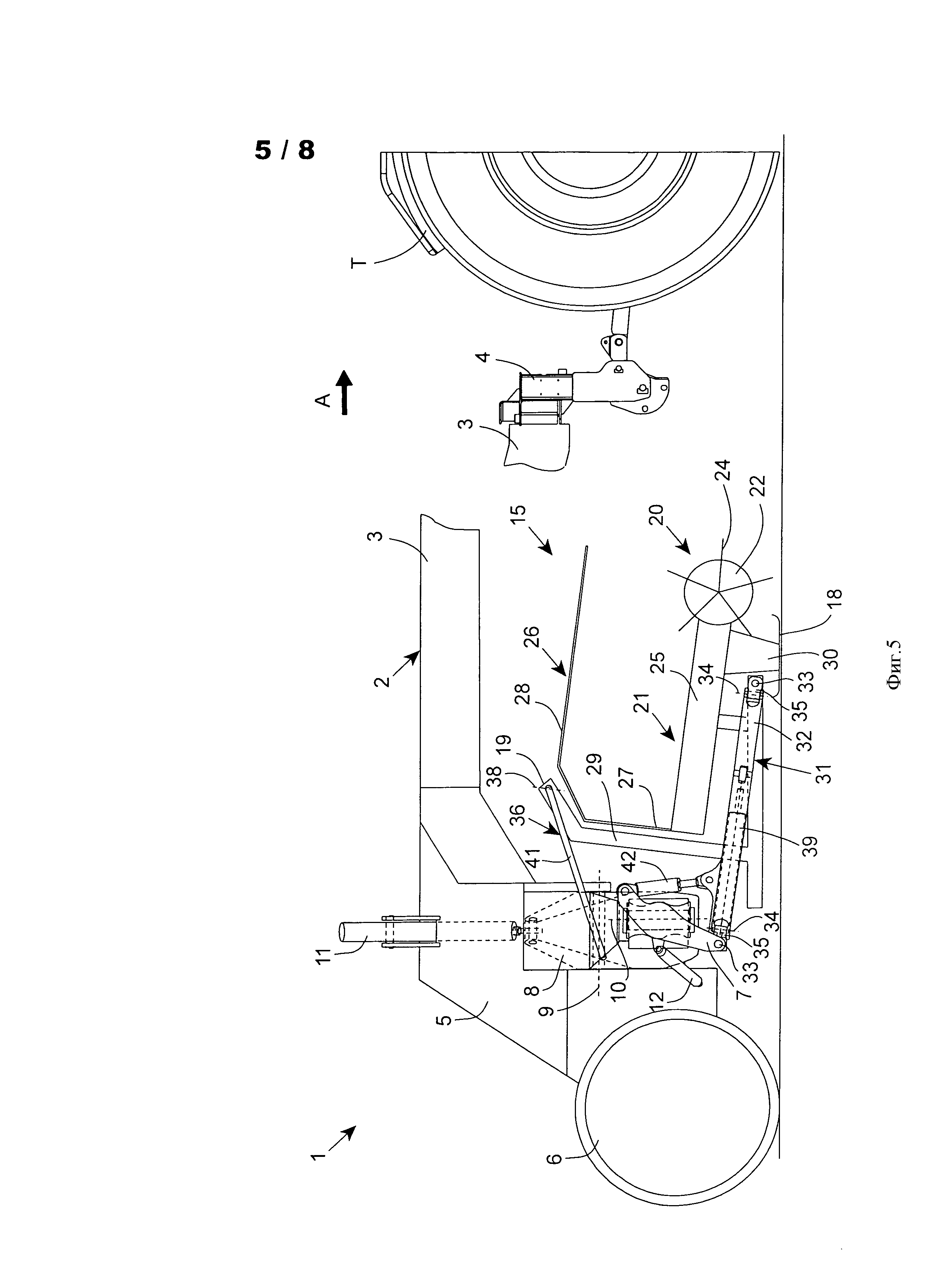
на фиг. 5 показан вариант осуществления машины, изображенной на фиг. 1, соединенной с трактором, вид сбоку с несколькими частичными разрезами;
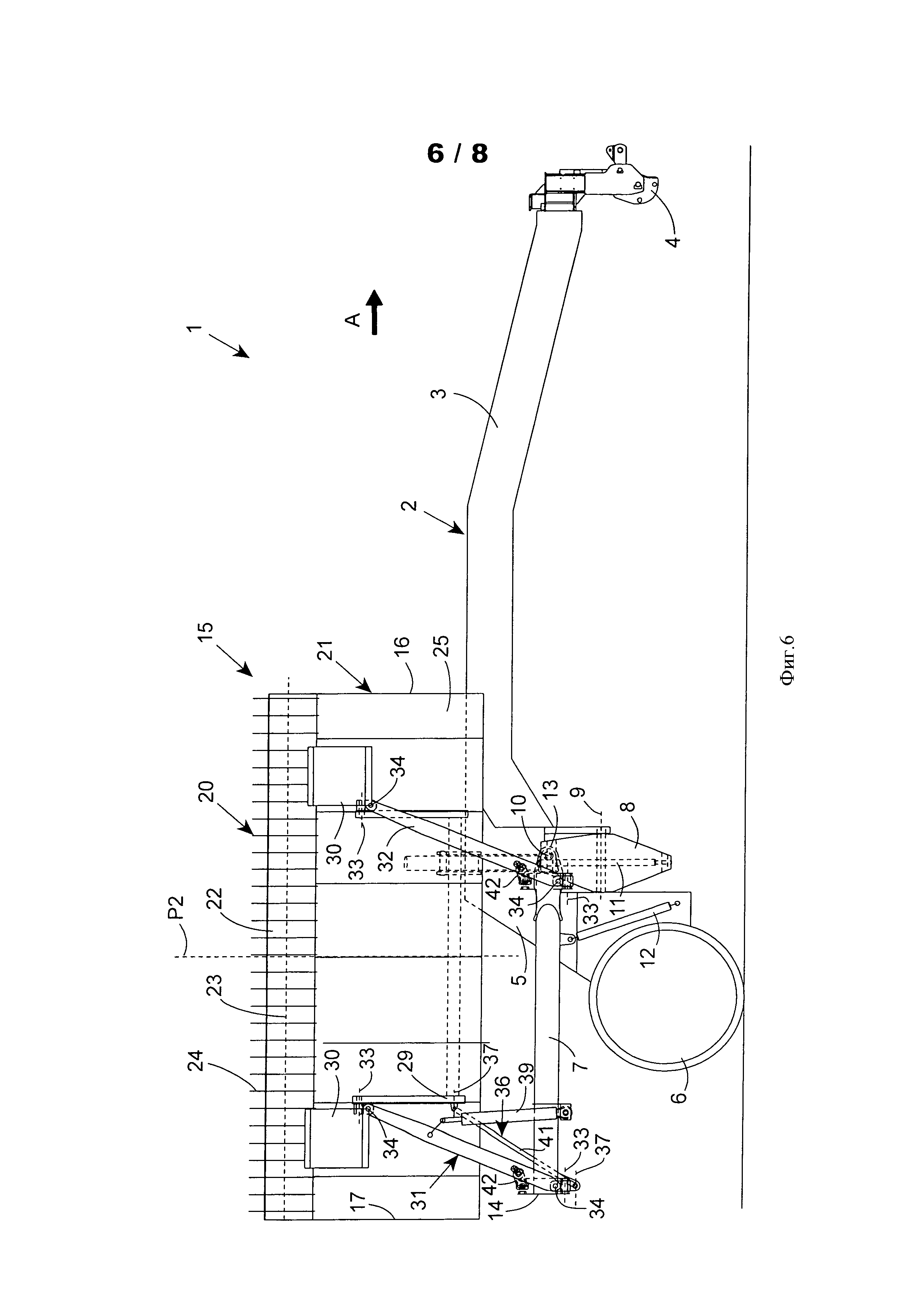
на фиг. 6 показан вариант осуществления машины, изображенной на фиг. 1, другой вид сбоку;
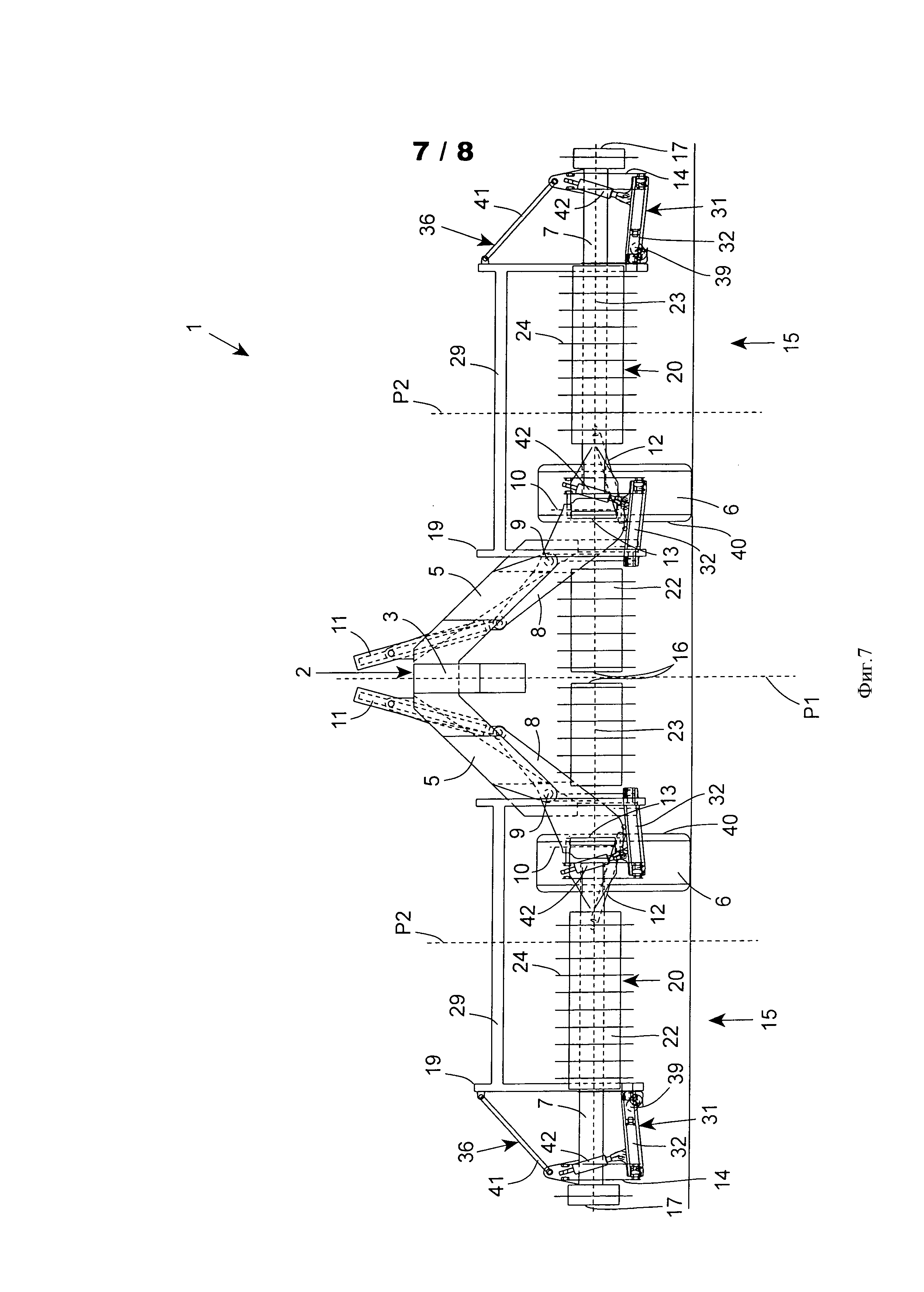
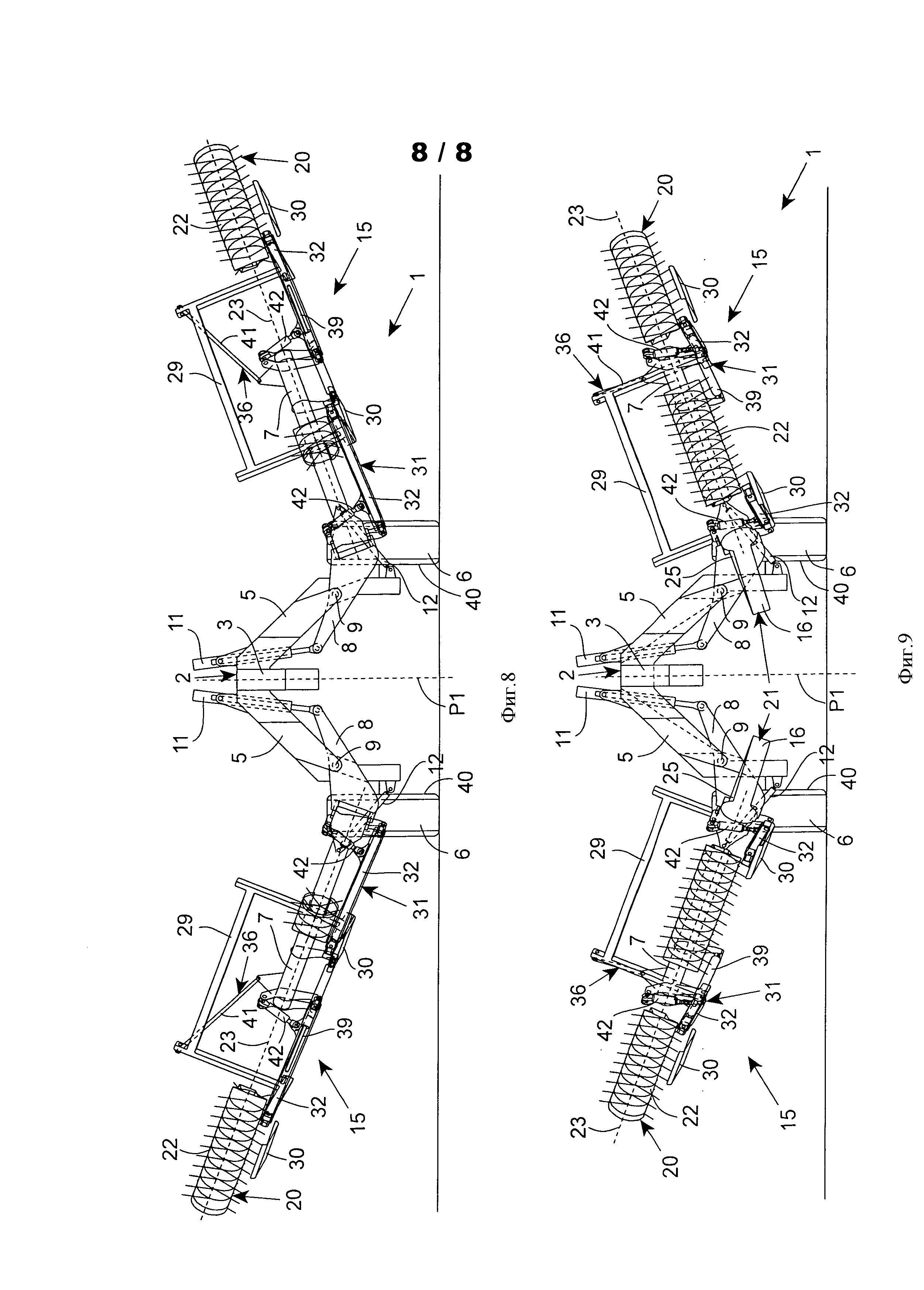
на фиг. 7-9 показан варианта осуществления машины, изображенной на фиг. 1, вид спереди с несколькими частичными разрезами.
Машина 1 в соответствии с изобретением является сельскохозяйственной машиной для заготовки растений, в частности, фуража. Эта машина 1 содержит шасси 2. Как показано на фиг.1, шасси содержит центральную балку 3, на переднем конце которой установлено сцепное устройство 4 для ее соединения с трактором Т, обеспечивающим перемещение машины в направлении А движения вперед. В дальнейшем тексте описания понятия «передний», «задний», «сзади», «левый» и «правый» следует рассматривать относительно направления А движения вперед, тогда как понятия «верх», «низ», «нижний», «верхний» и «снизу» следует рассматривать относительно земли. Центральная балка 3 расположена в направлении А движения вперед. В своей задней части центральная балка 3 содержит боковые стойки 5, направленные в сторону земли. Шасси 2 опирается на землю колесами 6. Каждое колесо 6 установлено на соответствующей боковой стойке 5. С шасси 2 соединена по меньшей мере одна крепежная штанга 7, установленная на боковой стойке 5. Крепежная штанга 7 соединена с этой боковой стойкой 5 при помощи шарнирного элемента 8. Этот шарнирный элемент 8 шарнирно соединен с боковой стойкой 5 при помощи первой шарнирной оси 9. Этот шарнирный элемент 8 расположен спереди колес 6. Эта первая шарнирная ось 9 проходит по существу в направлении А движения вперед. Кроме того, эта первая шарнирная ось 9 является по существу горизонтальной. Крепежная штанга 7 шарнирно соединена с шарнирным элементом 8 при помощи второй шарнирной оси 10, по существу вертикальной, когда машина работает. Эта вторая шарнирная ось 10 является по существу перпендикулярной к первой шарнирной оси 9. Между крепежной штангой 7 и шасси 2 установлен третий привод 11. Этот третий привод 11, например, домкрат, шарнирно соединен с шасси 2 и с шарнирным элементом 8 и позволяет последнему поворачиваться вокруг первой шарнирной оси 9. Кроме того, с шасси 2 и с крепежной штангой 7 шарнирно соединена тяга 12. Когда третий привод 11 находится в сокращенном положении, вторая шарнирная ось 10 является по существу вертикальной. Эта рабочая конфигурация крепежной штанги 7 показана, в частности, на фиг. 1, 3 и 5. Кроме того, крепежная штанга 7 находится спереди колеса 6, установленного на боковой стойке 5, с которой соединена крепежная штанга 7. В частности, крепежная штанга 7 является по существу перпендикулярной к направлению А движения. Кроме того, она является по существу горизонтальной. Когда третий привод 11 работает на удлинение, он поворачивает вверх шарнирный элемент 8 вокруг первой шарнирной оси 9. Одновременно крепежная штанга 7 поворачивается вокруг второй шарнирной оси 10 по причине наличия тяги 12, которая соединяет ее с шасси 2. При этом крепежная штанга 7 поворачивается из своей рабочей конфигурации вверх и назад относительно шасси 2. Когда третий привод 11 оказывается полностью выдвинутым, крепежная штанга 7 оказывается в конфигурации транспортировки. Эта конфигурация транспортировки крепежной штанги 7 показана на фиг. 6. В этой конфигурации сложенная крепежная штанга 7 занимает уменьшенный габаритный размер в направлении, перпендикулярном к направлению А движения вперед. Этого уменьшенного габарита достигают, в частности, за счет того, что крепежная штанга 7 располагается над колесом 6, установленным на соответствующей боковой стойке 5. Кроме того, крепежная штанга 7 расположена по существу в направлении А движения вперед. Она расположена по существу горизонтально. В конфигурации транспортировки внутренний конец 13 крепежной штанги 7, соединенный с шарнирным элементом 8, находится спереди колеса 6. Наружный конец 14 крепежной штанги 7, удаленный от ее внутреннего конца 13. находится сзади колеса 6. Эта кинематика складывания крепежной штанги 7 обеспечивает при транспортировке одновременно меньшую ширину машины 7 и хорошую маневренность, благодаря уменьшенной базе.
На крепежной штанге 7 установлено рабочее орудие 15. Оно содержит внутренний боковой конец 16 и наружный боковой конец 17. В рабочей конфигурации крепежной штанги 7 рабочее орудие 15 ограничено в боковом направлении, то есть поперечно к направлению А движения вперед указанными боковыми концами 16 и 17. Рабочее орудие 15 содержит также нижний вертикальный конец 18 и верхний вертикальный конец 19. В рабочей конфигурации крепежной штанги 7 рабочее орудие 15 ограничено в вертикальном направлении указанными вертикальными концами 18 и 19. В рабочей конфигурации крепежной штанги 7 рабочее орудие 15 может занимать по меньшей мере одно рабочее положение, в котором рабочее орудие обрабатывает лежащие на земле растения. В таком рабочем положении, показанном на фиг. 5, рабочее орудие 15 расположено в боковом направлении относительно центральной балки 3 шасси 2. Внутренний боковой конец 16 находится ближе к центральной балке 3, чем наружный боковой конец 17. Нижний вертикальный конец 18 находится близко или по существу на уровне земли. В этом рабочем положении рабочее орудие 15 расположено поперечно к направлению А движения вперед, в частности, по существу перпендикулярно к этому направлению. Кроме того, рабочее орудие 15 в основном расположено по существу в горизонтальной плоскости. Оно находится спереди крепежной штанги 7. Перемещение крепежной штанги 7 между ее рабочей конфигурацией и ее конфигурацией транспортировки приводит к перемещению рабочего орудия 15 между его рабочим положением и положением транспортировки. В этом положении транспортировки, показанном на фиг.6, рабочее орудие 15 в основном расположено в плоскости, по существу параллельной направлению А движения вперед. В частности, рабочее орудие 15 расположено по существу вдоль вертикали. Оно находится над крепежной штангой 7. Внутренний боковой конец 16 рабочего орудия 15 расположен спереди соответствующего колеса, в частности, спереди внутреннего конца 13 крепежной штанги 7. Наружный боковой конец 17 рабочего орудия 15 расположен сзади этого колеса 6, в частности, если смотреть с боковой стороны машины 1, по существу на том же уровне, что и наружный конец 14 крепежной штанги 7. В положении транспортировки рабочего орудия 15 его нижний вертикальный конец 18 виден для человека, находящегося со стороны машины 1, на которой расположено это рабочее орудие 15. С другой стороны, верхний вертикальный конец 19 рабочего орудия 15 не виден, так как он обращен к центральной балке 3 шасси 2.
Машина I согласно варианту осуществления, представленному на фигурах, является сеноуборочной машиной. Сеноуборочная машина является, в частности, укладчиком в валки лежащих на земле растений. Сеноуборочная машина является, в частности, машиной, известной под названием "Merger". В варианте осуществления, показанном на фигурах, рабочее орудие 15 содержит устройство 20 подборки растений на земле и находящееся следом за ним устройство 21 перемещения. На фиг. 1, 2, 7, 8 и 9 устройство 20 подборки и устройство 21 перемещения показаны с частичными вырезами, чтобы можно было лучше видеть другие элементы машины 1. Устройство 20 подборки содержит ротор 22, выполненный с возможностью вращения вокруг оси 23 вращения против часовой стрелки, если смотреть справа от устройства 20 подборки. В рабочем положении рабочего орудия 15 ротор 22 приводится во вращение вокруг этой оси 23 вращения, которая проходит поперечно к направлению А движения вперед, в частности, по существу перпендикулярно к этому направлению и, в частности, по существу горизонтально. Устройство 20 подборки содержит также зубья 24, которые собирают растения на уровне земли, приподнимают их и отбрасывают назад. Эти зубья 24 содержит заостренные концы, которые описывают кривую огибающую, когда зубья 24 приводятся в движение. Устройство 20 подборки может собирать растения, находящиеся на земле в валках или расстеленные на земле в виде скошенных, высушенных или подсушенных растений. Устройство 20 подборки является, например, устройством, известным под названием "pick-up", зубья 24 которого выполнены на роторе и выступают из множества пластин, изогнутых вокруг ротора 22 и расположенных рядом друг с другом вдоль оси вращения 23. Зубья 24 перемещаются между этими пластинами. Зубьями 24 управляют таким образом, что они постепенно освобождают растения, которые приближаются к устройству 20 подборки. Для этого устройство 20 подборки содержит, например, неподвижную дорожку, внутри которой перемещаются ролики, установленные на кулачках, соединенных с зубьями 24. В альтернативном варианте можно предусмотреть неуправляемые зубья 24. Машина 1 в соответствии с изобретением может содержать устройство 20 подборки, выполненное по-другому. Это устройство может содержать гибкую ленту, намотанную, с одной стороны, вокруг первого ротора, который может вращаться вокруг оси вращения и расположен в передней части устройства 20 подборки, и, с другой стороны, вокруг второго ротора, расположенного ближе к задней части. Этот второй ротор может быть расположен во время работы на более высоком расстоянии от земли, чем первый ротор таким образом, чтобы устройство 20 подборки перемещало растения назад и вверх в направлении устройства 21 перемещения. Такая лента содержит зубья, вилы или крюки, которые могут быть неподвижными или шарнирно соединенными с лентой. Устройство 20 подборки приводят в действие при помощи любого известного механизма. Речь может идти о гидравлическом или электрическом двигателе, при этом указанный двигатель может находиться внутри ротора или выступать из него сбоку. Устройство 20 подборки может также приводиться в действие при помощи цепи или ремня или шестеренной передачи. Возможна также комбинация таких средств. Устройство 21 перемещения собираемых растений находится сзади и вблизи устройства 20 подборки таким образом, что принимает растения, отбрасываемые назад этим устройством. Устройство 21 перемещения может приводиться в действие таким образом, чтобы перемещать растения поперечно к направлению А движения вперед. В варианте осуществления, показанном на фигурах, это устройство 21 перемещения содержит ленточный конвейер 25. Этот ленточный конвейер 25 приводится в движение по время работы таким образом, что перемещает растения поперечно к устройству 20 подборки, в частности, по существу параллельно оси 23 вращения ротора 22. При этом растения опять укладываются на землю в виде валка с целью их последующего сбора. На задней стороне устройства 21 перемещения установлен отражатель 26, показанный на фиг. 5, но не показанный на других фигурах для большей ясности. Этот отражатель содержит участок 27, по существу вертикальный во время работы, для ограничения отбрасывания назад растений. Отражатель 26 может содержать другой участок 28, по существу горизонтальный во время работы, для ограничения отбрасывания растений вверх. Этот другой участок 28 расположен в продолжении по существу вертикального участка 27 над устройством 21 перемещения. Устройство 21 перемещения может представлять собой также роликовый конвейер, ролики которого установлены, например, на осях вращения, ориентированных во время работы по существу в направлении А движения вперед. Такие ролики предпочтительно расположены рядом друг с другом и на небольшом расстоянии друг от друга и могут приводиться в движение таким образом, чтобы перемещать растения поперечно к устройству 20 подборки. Приведение в движение устройства 21 перемещения, например, ленточного конвейера 25 или указанных роликов можно осуществлять при помощи любого соответствующего механизма. Речь может идти о гидравлическом или электрическом двигателе. Можно также предусмотреть приведение в действие при помощи цепи или ремня или при помощи шестеренной передачи. Возможна также комбинация таких средств. Эти средства могут двигаться в одном или другом рабочем направлении. В частности, в случае ленточного конвейера 25 или роликового конвейера растения могут перемещаться в левую сторону или в правую сторону от рабочего орудия 15, образуя валок с одной или с другой стороны. Устройство 20 подборки, устройство 21 перемещения и отражатель 26, образующие рабочее орудие 15, установлены на раме 29 этого рабочего орудия 15. Эта рама 29 частично расположена под рабочим орудием 15, когда оно находится в рабочем положении, в частности, под устройством 21 перемещения. Рама 29 частично находится также сзади рабочего орудия 15 в рабочем положении, в частности, сзади устройства 21 перемещения. На раме 29 установлен по меньшей мере один опорный элемент 30, при помощи которого рабочее орудие 15 опирается на землю. Предпочтительно на раме 29 установлены по меньшей мере два опорных элемента 30. Опорный элемент 30 выполнен, например, в виде башмака. Этот башмак расположен, например, под устройством 21 перемещения. В частности, под устройством 21 перемещения можно предусмотреть два башмака. Опорный элемент 30 может быть выполнен также в виде ролика. Этот ролик 30 расположен, например, под устройством 21 перемещения или на боковом конце 16, 17 рабочего орудия 15. Можно также предусмотреть два ролика 30, каждый из которых установлен на соответствующем боковом конце 16, 17 рабочего орудия 15. Этот опорный элемент или эти опорные элементы 30 помогают рабочему орудию 15 следовать неровностям земли и позволяют ему перемещаться по земле, ограничивая попадание грунта в обрабатываемые растения. Рама 29 рабочего орудия 15 соединена с крепежной штангой 7 через соединительное устройство 31.
Соединительное устройство 31 выполнено таким образом, чтобы, по меньшей мере когда крепежная штанга 7 находится в рабочей конфигурации, обеспечивать первое перемещение рабочего орудия 15 относительно крепежной штанги 7, во время которого внутренний боковой конец 16 и наружный боковой конец 17 рабочего орудия 15 перемещаются вертикально по отношению к крепежной штанге 7 и в одинаковом относительно нее вертикальном направлении. Это первое перемещение обеспечивается по меньшей мере во время работы машины таким образом, чтобы соответствующее рабочее орудие 15 могло следовать профилю поля. По меньшей мере когда крепежная штанга 7 находится в рабочей конфигурации, боковые концы могут во время своих одновременных соответствующих вертикальных перемещений относительно крепежной штанги 7 отдаляться вместе от земли или приближаться вместе к земле. Соединительное устройство 31 содержит по меньшей мере одну штангу 32, в частности, показанную на фиг. 1-4. В рабочей конфигурации крепежной штанги 7 эта штанга 32 ориентирована в основном в направлении А движения вперед. Под выражением «ориентирована в основном в направлении А движения вперед» подразумевается, что эта штанга 32, в частности, направление длины этой штанги 32 образует с направлением А движения вперед угол в пределах от 0° примерно до 45°. Кроме того, в рабочей конфигурации крепежной штанги 7 штанга 32 расположена по меньшей мере своей большей частью спереди крепежной штанги 7. Штанга 32 шарнирно соединена с крепежной штангой 7 вокруг первой оси 33. Эта первая ось 33 соединяет, например, напрямую штангу с крепежной штангой 7. Первая ось 33 ориентирована поперечно, в частности, по существу перпендикулярно к направлению А движения вперед и по существу горизонтально, когда крепежная штанга 7 находится в рабочей конфигурации. Первая ось 33 может быть физической осью, то есть представлять собой удлиненную деталь по существу цилиндрического сечения, которая обеспечивает соединение штанги 32 с крепежной штангой 7. Первая ось 33 может быть также или альтернативно по отношению к физической оси виртуальной осью. В этом случае первая ось 33 представляет собой прямую, вокруг которой происходит поворот штанги 32. Первая виртуальная ось 33 существует, когда, например, соответствующее шарнирное соединение штанги 32 с крепежной штангой 7 выполнено в виде шарового шарнира. За счет поворота вокруг первой оси 33, которая соединяет штангу 32 с крепежной штангой 7, штанга 32 перемещается вертикально относительно крепежной штанги 7 в рабочей конфигурации. Таким образом, рабочее орудие 15 перемещается вертикально по отношению к этой крепежной штанге 7. Эта возможность вертикального перемещения рабочего орудия 15 при помощи штанги 32 и первой оси 33 позволяет рабочему орудию 15 следовать неровному профилю поля. Она позволяет также рабочему орудию 15 занимать описанное выше рабочее положение, а также по меньшей мере одно поднятое над землей положение, например, при прохождении над валками, в котором рабочее орудие 15 не действует на лежащие на земле растения. Указанное вертикальное перемещение рабочего орудия 15 и/или его расположение в указанном поднятом положении возможны, когда крепежная штанга 7 остается в своей рабочей конфигурации неподвижной или по меньшей мере по существу неподвижной по отношению к шасси 2. В частности, штанга 32 шарнирно соединена с крепежной штангой 7 и с рамой 29 рабочего орудия 15 вокруг соответствующих первых осей 33. Эти первые оси 33 позволяют рабочему орудию 15 перемещаться вертикально относительно крепежной штанги 7 и по существу параллельно земле. Эти первые оси 33 ориентированы поперечно, в частности, по существу перпендикулярно к направлению А движения вперед и по существу горизонтально, когда крепежная штанга 7 находится в рабочей конфигурации. В частности, эти первые оси 33 параллельны между собой. Первая ось 33 может быть физической осью, то есть удлиненной деталью по существу цилиндрического сечения, которая обеспечивает соединение штанги 32 с крепежной штангой 7 или с рамой 29 рабочего орудия 15. Первая ось 33 может быть также или альтернативно по отношению к физической оси виртуальной осью. В этом случае первая ось 33 представляет собой прямую, вокруг которой происходит поворот штанги 32. Первая виртуальная ось 33 существует, когда, например, соответствующее шарнирное соединение штанги 32 с крепежной штангой 7 выполнено в виде шарового шарнира. За счет поворота вокруг по меньшей мере одной из этих первых осей 33 штанга 32 перемещается вертикально относительно крепежной штанги 7 в рабочей конфигурации. Таким образом, рабочее орудие 15 перемещается вертикально по отношению к этой крепежной штанге 7. Во время этого перемещения штанга 32 поворачивается вокруг первой оси 33, которая соединяет ее с крепежной штангой 7, а также вокруг первой оси 33, которая соединяет ее с рамой 29 рабочего орудия 15. Одна из первых осей 33 соединяет, например, напрямую штангу 32 с крепежной штангой 7. Другая из этих первых осей 33 соединяет, например, напрямую штангу 32 с рамой 29 рабочего орудия 15.
Согласно изобретению, соединительное устройство 31 содержит средства, позволяющие осуществлять второе перемещение рабочего орудия 15 относительно крепежной штанги 7. Это второе перемещение является поперечным к направлению А движения вперед и по существу горизонтальным, если рассматривать крепежную штангу 7 в рабочей конфигурации. Это второе перемещение может происходить, когда крепежная штанга 7 находится в рабочей конфигурации или когда крепежная штанга 7 находится в промежуточной конфигурации между рабочей конфигурацией и конфигурацией транспортировки. Под выражением «является поперечным к направлению А движения вперед и по существу горизонтальным, если рассматривать крепежную штангу 7 в рабочей конфигурации» подразумевается, что даже при своем осуществлении в промежуточной конфигурации, а не в рабочей конфигурации крепежной штанги 7 это второе перемещение может иметь ориентацию, которая, приводя виртуально крепежную штангу 7 в ее рабочую конфигурацию, будет поперечной к направлению А движения вперед и по существу горизонтальной. Промежуточная конфигурация является, например, конфигурацией прохождения валка. Средства позволяют осуществлять это второе перемещение независимо от первого вертикального перемещения рабочего орудия 15 относительно крепежной штанги 7. Таким образом, рабочее орудие 15 может следовать профилю поля при любом поперечном положении, которое оно занимает относительно шасси 2.
Для этого средства содержит вторую ось 34, ориентированную по существу перпендикулярно к первой оси 33. В рабочей конфигурации крепежной штанги 7 эта вторая ось 34 ориентирована по существу вертикально. Штанга 32 шарнирно соединена с крепежной штангой 7 вокруг этой второй оси 34. Вторая ось 34 соединяет, например, опосредованно штангу 32 с крепежной штангой 7 при помощи шарнирной детали 35, соединенной с крепежной штангой 7 при помощи первой оси 33. Вариант осуществления, показанный на фиг.2, включает в себя такое расположение второй оси 34. Вторая ось 34 может быть физической осью. Вторая ось 34 может быть отличной от первой оси 33. Вторая ось 34 может также пересекаться с первой осью 33, и в этом случае первая ось 33 и вторая ось 34 образуют вместе крестовину шарнирного соединения штанги 32 с крепежной штангой 7. Вторая ось 34 может быть также или альтернативно по отношению к физической оси виртуальной осью. Виртуальная вторая ось существует, например, когда соответствующее шарнирное соединение штанги 32 с крепежной штангой 7 представляет собой шаровой шарнир. Согласно не показанному альтернативному варианту, вторая ось 34 может напрямую соединять штангу 32 с крепежной штангой 7. Такую конструкцию получают, например, при помощи шарнирной крестовины, расположенной между штангой 32 и крепежной штангой 7, при этом указанная шарнирная крестовина включает в себя первую ось 33 и вторую ось 34. Другая конструкция, обеспечивающая прямое соединение штанги 32 с крепежной штангой 7, содержит шаровой шарнир между двумя вышеуказанными элементами, при этом указанный шаровой шарнир включает в себя первую ось 33 и вторую ось 34, которые в этом случае являются виртуальными. Благодаря соединению штанги 32 с крепежной штангой 7 при помощи первой оси 33 и второй оси 34, соединительное устройство 31 объединяет в себе функции вертикального и поперечного перемещения рабочего орудия 15 относительно крепежной штанги 7. Таким образом, при помощи одного соединительного устройства 31, в частности за счет только движений штанги 32 относительно крепежной штанги 7 в вертикальном и поперечном направлениях, можно обеспечить следование профилю поля, перемещение между рабочим положением и поднятым положением рабочего орудия над землей, а также регулирование его поперечного положения относительно шасси 2. Конструкцию крепежной штанги 7, а также ее средства шарнирного соединения и перемещения относительно шасси 2 можно упростить и облегчить. В частности, можно отказаться от выполнения штанги 32 из нескольких шарнирно соединенных и/или перемещающихся скольжением секций с целью перемещения рабочего орудия 15 поперечно по отношению к шасси 2. Средства содержат, в частности, вторые оси 34, ориентированные по существу перпендикулярно к первой оси 33. В рабочей конфигурации крепежной штанги 7 эти вторые оси 34 ориентированы по существу вертикально. В частности, эти вторые оси 34 являются параллельными между собой. Эти вторые оси 34 позволяют рабочему орудию 15 сохранять, если смотреть на машину 1 сверху, одинаковую ориентацию относительно направления А движения вперед, в частности, располагаться по существу перпендикулярно к направлению А движения вперед при любом поперечном положении рабочего орудия 15 относительно крепежной штанги 7 в рабочей конфигурации. Этот эффект наглядно виден при сравнении фиг.3 и 4. Штанга 32 шарнирно соединена с крепежной штангой 7 и с рамой 29 рабочего орудия 15 при помощи этих соответствующих вторых осей 34. Одна из этих вторых осей 34 соединяет, например, опосредованно штангу 32 с крепежной штангой 7 при помощи шарнирной детали 35, соединенной с крепежной штангой 7 при помощи соответствующей первой оси 33. Другая из этих вторых осей 34 соединяет, например, опосредованно штангу 32 с рамой 29 рабочего орудия 15 при помощи другой шарнирной детали 35, соединенной с этой рамой 29 при помощи соответствующей первой оси 33. Вторая ось 34 может быть физической осью, то есть удлиненной деталью в основном цилиндрического сечения, которая обеспечивает соединение штанги 32 с крепежной штангой 7 или с рамой 29 рабочего орудия 15. Вторая ось 34 может быть отличной от соответствующей первой оси 33. Вторая ось 34 может также пересекаться с соответствующей первой осью 33, и в этом случае первая ось 33 и вторая ось 34 образуют вместе крестовину шарнирного соединения штанги 32 с крепежной штангой 7 или с рамой 29 рабочего орудия 15. Вторая ось 34 может быть также или альтернативно по отношению к физической оси виртуальной осью. В этом случае вторая ось 34 представляет собой прямую, вокруг которой происходит поворот штанги 32. Виртуальная вторая ось существует, например, когда соответствующее шарнирное соединение штанги 32 с крепежной штангой 7 или с рамой 29 рабочего орудия 15 представляет собой шаровой шарнир. Согласно не показанному альтернативному варианту, одна и/или другая из соответствующих вторых осей 34 шарнирного соединения с крепежной штангой 7 или с рамой 29 рабочего орудия 15 может (могут) напрямую соединять штангу 32 с крепежной штангой 7, соответственно с рамой 29. Такую конструкцию получают, например, при помощи шарнирной крестовины, расположенной между штангой 32 и крепежной штангой 7, соответственно между штангой 32 и рамой 29, при этом указанная шарнирная крестовина включает в себя соответствующие первую ось 33 и вторую ось 34. Другая конструкция, обеспечивающая прямое соединение штанги 32 с крепежной штангой 7, соответственно с рамой 29, содержит шаровой шарнир между штангой 32 и крепежной штангой 7, соответственно между штангой 32 и рамой 29, при этом указанный шаровой шарнир включает в себя соответствующие первую ось 33 и вторую ось 34, которые в этом случае являются виртуальными.
Соединительное устройство 31 содержит соединительный элемент 36. В рабочей конфигурации крепежной штанги 7 соединительный элемент 36 расположен, по меньшей мере, своей большей частью спереди крепежной штанги 7. Соединительный элемент 36 в основном ориентирован в направлении А движения вперед, когда крепежная штанга 7 находится в рабочей конфигурации. Под выражением «в основном ориентирован в направлении А движения вперед» подразумевают, что соединительный элемент 36 образует с направлением А движения вперед угол, составляющий от 0° и примерно до 45°. Соединительный элемент 36 шарнирно соединен с крепежной штангой 7 вокруг первой соединительной оси 37. Эта первая соединительная ось 37 соединяет, например, напрямую соединительный элемент 36 с крепежной штангой 7. Когда крепежная штанга 7 находится в рабочей конфигурации, первая соединительная ось 37 ориентирована по существу горизонтально и поперечно, в частности, по существу перпендикулярно к направлению А движения вперед. Первая соединительная ось 37 по существу параллельна первой оси 33 штанги 32. Как и первая ось 33, первая соединительная ось 37 может быть физической осью. Первая соединительная ось 37 может быть также или альтернативно по отношению к физической оси виртуальной осью. В этом случае первая соединительная ось 37 представляет собой прямую, вокруг которой происходит поворот соединительного элемента 36. Виртуальная первая соединительная ось 37 существует, например, когда соответствующее шарнирное соединение соединительного элемента 36 с крепежной штангой 7 представляет собой шаровой шарнир. За счет поворота вокруг первой соединительной оси 37 соединительный элемент 36 перемещается вертикально относительно крепежной штанги 7 в рабочей конфигурации. Штанга 32 находится на расстоянии и не связана с соединительным элементом 36.
Соединительный элемент 36 шарнирно соединен с крепежной штангой 7 и с рабочим орудием вокруг соответствующих первых соединительных осей 37. Одна из этих первых соединительных осей 37 соединяет, например, напрямую соединительный элемент 36 с крепежной штангой 7. Другая из этих первых соединительных осей 37 соединяет, например, напрямую соединительный элемент 36 с рамой 29 рабочего орудия 15. Когда крепежная штанга 7 находится в рабочей конфигурации, эти первые соединительные оси 37 ориентированы по существу горизонтально и поперечно, в частности, по существу перпендикулярно к направлению А движения вперед. Эти первые соединительные оси 37 по существу параллельны между собой. Эти первые соединительные оси 37 по существу параллельны первой оси 33 штанги 32. Первая соединительная ось 37 может быть физической осью. Первая соединительная ось 37 может быть также или альтернативно по отношению к физической оси виртуальной осью. В этом случае первая соединительная ось 37 представляет собой прямую, вокруг которой происходит поворот соединительного элемента 36. Виртуальная первая соединительная ось 37 существует, например, когда соответствующее шарнирное соединение соединительного элемента 36 с крепежной штангой 7 представляет собой шаровой шарнир. За счет поворота вокруг по меньшей мере одной из первых соединительных осей 37 соединительный элемент 36 перемещается вертикально относительно крепежной штанги 7 в рабочей конфигурации. В частности, во время этого перемещения соединительный элемент 36 поворачивается вокруг первой соединительной оси 37, которая соединяет его с крепежной штангой 7. Во время этого перемещения соединительный элемент 36 поворачивается также вокруг первой соединительной оси 37, которая соединяет его с рамой 29 рабочего орудия 15.
В варианте осуществления, показанном на фигурах, соединительное устройство 31 содержит две штанги 32. Они удалены друг от друга и не связаны друг с другом. Каждая из этих штанг 32 шарнирно соединена, с одной стороны, с крепежной штангой 7 при помощи первой оси 33 и второй оси 34, с другой стороны, с рамой 29 рабочего орудия 15 тоже при помощи первой оси 33 и второй оси 34. Каждая штанга 32 находится на расстоянии от соединительного элемента 36 и с ним не связана.
Средства содержат вторую соединительную ось 38, ориентированную по существу перпендикулярно к первой соединительной оси 37. В рабочей конфигурации крепежной штанги 7 эта вторая соединительная ось 38 ориентирована по существу вертикально. Соединительный элемент 36 шарнирно соединен с крепежной штангой 7 вокруг этой второй соединительной оси 38. Вторая соединительная ось 38 может быть физической осью. Вторая соединительная ось 38 может быть отличной от первой соединительной оси 37. Вторая соединительная ось 38 может также пересекаться с первой соединительной осью 37, и в этом случае первая соединительная ось 37 и вторая соединительная ось 38 образуют вместе крестовину шарнирного соединения соединительного элемента 36 с крепежной штангой 7. Вторая соединительная ось 38 может быть также или альтернативно по отношению к физической оси виртуальной осью. Виртуальная вторая соединительная ось 38 существует, например, когда соответствующее шарнирное соединение соединительного элемента 36 с крепежной штангой 7 представляет собой шаровой шарнир.
Средства содержат, в частности, вторые соединительные оси 38, ориентированные по существу перпендикулярно к первой соединительной оси 37. В рабочей конфигурации крепежной штанги 7 эти вторые соединительные оси 38 ориентированы по существу вертикально. Соединительный элемент 36 шарнирно соединен с крепежной штангой 7 и с рамой 29 рабочего орудия 15 вокруг этих соответствующих вторых соединительных осей 38. Вторая соединительная ось 38 может быть физической осью. Вторая соединительная ось 38 может быть отличной от соответствующей первой соединительной оси 37. Вторая соединительная ось 38 может также пересекаться с соответствующей первой соединительной осью 37, и в этом случае первая соединительная ось 37 и вторая соединительная ось 38 образуют вместе крестовину шарнирного соединения соединительного элемента 36 с крепежной штангой 7 или с рамой 29 рабочего орудия 15. Вторая соединительная ось 38 может быть также или альтернативно по отношению к физической оси виртуальной осью. Виртуальная вторая соединительная ось 38 существует, например, когда соответствующее шарнирное соединение соединительного элемента 36 с крепежной штангой 7 или с рабочим орудием 15 представляет собой шаровой шарнир.
Согласно предпочтительному отличительному признаку изобретения, штанга 32 проходит вперед от крепежной штанги 7 в рабочей конфигурации в направлении нижней части рамы 29. В частности, первая ось 33, соединяющая эту штангу 32 с рамой 29 рабочего орудия 15, находится под устройством 21 перемещения. Таким образом, большая часть веса рабочего орудия 15 ложится на штангу 32. Первая ось 33, соединяющая штангу 32 с рамой 29 рабочего орудия 15 расположена, в частности, над прямой, параллельной оси 23 вращения устройства 20 подборки и проходящей через центр тяжести рабочего орудия 15. Таким образом, рабочее орудие 15 установлено на этой штанге 32 сбалансированно, что позволяет уменьшить тенденцию рабочего орудия 15 к повороту вокруг первой оси 33, соединяющей штангу 33 с рамой 29. В варианте осуществления, показанном на фигурах, обе штанги 32 проходят вперед от крепежной штанги 7 в рабочей конфигурации в направлении нижней части рамы 29. В частности, первые оси 33, соединяющие эти штанги 32 с рамой 29 рабочего орудия 15, находятся под устройством 21 перемещения. Эти первые оси 33, соединяющие штанги 32 с рамой 29 рабочего орудия 15, расположены, в частности, над прямой, параллельной оси 23 вращения устройства 20 подборки и проходящей через центр тяжести рабочего орудия 15. Таким образом, рабочее орудие 15 установлено на штангах 32 почти в состоянии равновесия, что позволяет уменьшить усилия в соединительном элементе 36, то есть напряжения растяжения или сжатия.
Средства содержат первый привод 39, который позволяет перемещать рабочее орудие 15 относительно крепежной штанги 7 поперечно к направлению А движения вперед. Этот первый привод 39 является, например, гидравлическим домкратом. Первый привод 39 соединяет два элемента среди крепежной штанги 7, соединительного устройства 31 и рамы 29 рабочего орудия 15. Будучи соединенным, например, с соединительным устройством 31, первый привод 39 соединен с одной из штанг 32 или с соединительным элементом 36. В варианте осуществления, показанном на фигурах, первый привод 39 расположен, в частности, шарнирно установлен между крепежной штангой 7 и одной из штанг 32. Он расположен не параллельно относительно этой штанги 32. Таким образом, когда первым приводом 39 управляют на удлинение или на сокращение, он поворачивает штангу 32 вокруг второй оси 34, которая соединяет ее с крепежной штангой 7. Разумеется, первый привод 39 может быть также шарнирно установлен между крепежной штангой 7 и рамой 29 рабочего орудия 15 и проходить не параллельно штангам 32. Первый привод 39 позволяет перемещать рабочее орудие 15 между первым поперечным положением относительно крепежной штанги 7 и вторым поперечным положением относительно крепежной штанги 7. В первом поперечном положении, показанном на фиг.3, внутренний боковой конец 16 рабочего орудия 15 расположен близко к первой центральной вертикальной плоскости Р1 шасси 2. Эта первая плоскость Р1 ориентирована в направлении А движения вперед. Она проходит через продольную ось центральной балки 3 шасси 2. В первом поперечном положении, показанном на фиг.3, внутренний боковой конец 16 рабочего орудия 15 находится между первой плоскостью Р1 и колесом 6, находящимся относительно центральной балки 3 с той же стороны, что и рабочее орудие 15. Рабочее орудие 15 может занимать первое рабочее положение, полученное в результате перевода крепежной штанги 7 в рабочую конфигурацию и перевода рабочего орудия 15 в первое положение, поперечное относительно крепежной штанги 7. В этом первом рабочем положении внутренний боковой конец 16 рабочего орудия 15 расположен по существу в первой центральной вертикальной плоскости Р1 шасси 2. В частности, как видно из фиг. 3, этот внутренний боковой конец 16 находится под центральной белкой 3 шасси 2. Во втором поперечном положении рабочего орудия 15 относительно крепежной штанги 7, показанном на фиг. 4, внутренний боковой конец 16 рабочего орудия 15 удален от первой центральной вертикальной плоскости Р1 шасси 2. Рабочее орудие 15 может занимать второе рабочее положение, полученное в результате перевода крепежной штанги 7 в рабочую конфигурацию и перевода рабочего орудия 15 во второе положение, поперечное относительно крепежной штанги 7. В этом втором рабочем положении внутренний боковой конец 16 рабочего орудия 15 расположен по существу на уровне внутренней боковины 40 шины колеса 6, которое по отношению к центральной балке находится с той же стороны, что и рабочее орудие 15, или слегка отступает от этой внутренней боковины 40. Таким образом, расстояние, отделяющее внутренний боковой конец 16 от первой плоскости Р1, равно или немного меньше половины расстояния, разделяющего соответствующие внутренние боковины 40 шин колес 6. Когда крепежная штанга 7 находится в рабочей конфигурации, две вертикальные плоскости, каждая из которых проходит через длину соответствующей штанги 32, являются параллельными между собой. Кроме того, обе штанги 32 имеют по существу одинаковую длину. Таким образом, перемещение рабочего орудия 15 между первым поперечным положением и вторым поперечным положением происходит по существу параллельно длине крепежной штанги 7.
Согласно предпочтительному отличительному признаку изобретения, рабочее орудие 15 имеет вторую центральную вертикальную плоскость Р2, находящуюся на половине расстояния от внутреннего и наружного боковых концов 16 и 17, при этом одна штанга 32 находится между внутренним боковым концом 16 и второй центральной вертикальной плоскостью Р2, а другая штанга 32 находится между второй центральной вертикальной плоскостью Р2 и наружным боковым концом 17. Таким образом, рама 29 рабочего орудия 15 прочно удерживается относительно крепежной штанги 7 в рабочей конфигурации. Это расположение штанг 32 значительно уменьшает тенденцию рабочего орудия 15 к повороту вокруг вертикальной оси, когда во время работы усилия, действующие на рабочее орудие 15 со стороны земли и обрабатываемых растений, не распределены равномерно между внутренним боковым концом 16 и наружным боковым концом 17 рабочего орудия 15. В частности, это происходит, когда плотность обрабатываемых, в частности, подбираемых растений не является однородной или когда валок, подбираемый рабочим орудием 15, не центрован относительно этого орудия. Кроме того, одна штанга 32 расположена по существу на уровне внутреннего конца 13 крепежной штанги 7. Речь идет о штанге 32, находящейся между внутренним боковым концом 16 рабочего орудия 15 и второй центральной вертикальной плоскостью Р2. Одна штанга 32 расположена по существу на уровне наружного конца 14 крепежной штанги 7. Речь идет о штанге 32, находящейся между второй центральной вертикальной плоскостью Р2 и наружным боковым концом 17.
Соединительный элемент 36 содержит стержень 41. В частности, соединительный элемент 36 образован стержнем 41. В рабочей конфигурации крепежной штанги 7 этот стержень 41 ориентирован в основном в направлении А движения вперед. Под выражением «ориентирован в основном в направлении А движения вперед» следует понимать, что этот стержень 41 образует с направлением А движения вперед угол, составляющий от 0° примерно до 45°. Стержень 41 шарнирно соединен с крепежной штангой 7 и с рамой 29 рабочего орудия 15 при помощи первой и второй соединительных осей 37 и 38. В частности, стержень 41 шарнирно соединен напрямую с крепежной штангой 7 при помощи по меньшей мере одной из соответствующих первой и второй соединительных осей 37 и 38 и напрямую с рамой 29 рабочего орудия 15 при помощи, по меньшей мере, одной из других соответствующих первой и второй соединительных осей 37 и 38. Стержень 41 имеет фиксированную или переменную длину. Стержень 41 с переменной длиной содержит, например, элементы, завинчиваемые при помощи правой резьбы и левой резьбы. Он может также состоять из элементов, которые могут перемещаться скольжением один внутри другого и могут стопориться относительно друг друга при помощи штыря, который можно вставлять в несколько регулировочных отверстий. Наконец, такой стержень 41 переменной длины может быть образован домкратом, в частности, гидравлическим домкратом.
Соединительный элемент 36 и по меньшей мере одна из штанг 32 находятся в соответствующих плоскостях, которые отстоят друг от друга в вертикальном направлении, когда крепежная штанга 7 находится в рабочей конфигурации. Как показано на фиг. 5, соединительный элемент 36 расположен в плоскости, которая, когда крепежная штанга 7 находится в рабочей конфигурации, удалена вертикально дальше от земли, чем плоскость, в которой находится штанга 32, в частности, каждая штанга 32. Когда крепежная штанга 7 находится в рабочей конфигурации, штанга 32, в частности, каждая штанга 32 расположена по меньшей мере на части своей длины под устройством 21 перемещения. Что касается соединительного элемента 36, то он проходит по меньшей мере на части своей длины от крепежной штанги 7 в направлении верхнего вертикального конца 19 рабочего орудия 15, например, в направлении верхней части отражателя 26, установленного сзади устройства 21 перемещения.
Машина 1 в соответствии с изобретением содержит по меньшей мере,один второй привод 42. Он соединяет два элемента среди крепежной штанги 7, соединительного устройства 31 и рамы 29 рабочего орудия 15. В варианте осуществления, показанном на фигурах, второй привод 42 шарнирно установлен между крепежной штангой 7 и штангой 32. Второй привод 42 является, например, домкратом, в частности, гидравлическим домкратом. Второй привод 42 позволяет осуществлять перемещение рабочего орудия 15 относительно крепежной штанги 7 по меньшей мере в одно поднятое положение рабочего орудия 15 по отношению к крепежной штанге 7, в котором рабочее орудие 15 удалено от земли. Это поднятое положение показано на фиг. 7. В частности, для рабочего орудия 15 предусмотрены два вторых привода 42. Каждый из них шарнирно соединен с крепежной штангой 7 и с соответствующей штангой 32. Перемещение в поднятое положение обеспечивается обоими вторыми приводами 42, которые приводятся в действие, например, одновременно. В поднятом положении относительно крепежной штанги 7 рабочее орудие 15 не обрабатывает лежащие на земле растения. Это поднятое положение находится между рабочим положением и положением транспортировки рабочего орудия 15. Перемещение рабочего орудия 15 относительно крепежной штанги 7 при помощи второго привода 42 в поднятое положение рабочего орудия 15 относительно крепежной штанги 7, в частности, из рабочего положения рабочего орудия 15 в поднятое положение рабочего орудия 15 относительно крепежной штанги 7 имеет вертикальную составляющую. Это перемещение можно производить, когда крепежная штанга 7 находится в рабочей конфигурации. Это перемещение в основном является вертикальным. Кроме того, рабочее орудие 15 остается по существу параллельным земле во время этого перемещения. В рабочей конфигурации крепежной штанги 7 и в поднятом положении рабочего орудия 15 относительно крепежной штанги 7 рабочее орудие 15 расположено по существу перпендикулярно к направлению А движения вперед. В рабочей конфигурации крепежной штанги 7 и в поднятом положении рабочего орудия 15 относительно крепежной штанги 7 внутренний и наружный боковые концы 16 и 17 рабочего орудия 15 находятся по существу на одинаковой высоте от земли. В частности, крепежная штанга 7 в рабочей конфигурации остается неподвижной или по существу неподвижной относительно шасси 2. Полученное поднятое положение, когда крепежная штанга 7 находится в рабочей конфигурации, является например, положением прохождения рабочего орудия 15 над валком небольшой высоты, ранее сформированным уборочной машиной, отрегулированной на широкое ворошение валков. В этом поднятом положении рабочего орудия 15 относительно крепежной штанги 7 в рабочей конфигурации вертикальный промежуток между рабочим орудием 15 и землей является большим и составляет от 200 до 400 мм, например, составляет около 300 мм.
Согласно предпочтительному отличительному признаку изобретения, одно поднятое положение является первым поднятым положением. Это первое поднятое положение, которое может занимать рабочее орудие 15 относительно крепежной штанги 7, можно получить за сет поперечного позиционирования рабочего орудия 15 в первое поперечное положение относительно крепежной штанги 7. В данном случае, поднятое положение, показанное на фиг. 7, является таким первым поднятым положением. Начиная от первого рабочего положения рабочего орудия 15, приведение в действие второго привода и вторых приводов 42 приводит к поднятию рабочего орудия 15 таким образом, что оно перемещается в первое поднятое положение относительно крепежной штанги 7.
Согласно другому предпочтительному отличительному признаку изобретения, другое поднятое положение является вторым поднятым положением. Это второе поднятое положение, которое может занимать рабочее орудие 15 относительно крепежной штанги 7, можно получить за сет поперечного позиционирования рабочего орудия 15 во второе поперечное положение относительно крепежной штанги 7. Начиная от второго рабочего положения рабочего орудия 15, приведение в действие второго привода или вторых приводов 42 приводит к поднятию рабочего орудия 15 таким образом, что оно перемещается во второе поднятое положение относительно крепежной штанги 7.
В частности, рабочее орудие 15 может занимать первое и второе поднятые положения относительно крепежной штанги 7, а именно либо одно, либо другое, в зависимости от необходимости, когда крепежная штанга 7 находится в рабочей конфигурации. Можно также перемещать рабочее орудие 15 из первого поднятого положения во второе поднятое положение и наоборот путем приведения в действие первого привода, когда крепежная штанга 7 находится в рабочей конфигурации. Так, из первого поднятого положения, показанного на фиг. 7, рабочее орудие 15 можно удалить от центральной балки 3 шасси 2 и переместить в его второе поднятое положение, при этом во время этого перемещения крепежная штанга 7 остается в своей рабочей конфигурации.
Между крепежной штангой 7 и шасси установлен третий привод 11, который позволяет перемещать крепежную штангу 7 относительно шасси 2 в промежуточную конфигурацию относительно шасси 2, которая находится между рабочей конфигурацией и конфигурацией транспортировки. В этой промежуточной конфигурации наружный конец 14 крепежной штанги 7 находится на большей высоте от земли, чем ее внутренний конец 13. Кроме того, наружный конец 14 находится сзади по отношению к внутреннему концу 13. Таким образом, крепежная штанга 7 имеет наклонную ориентацию, промежуточную между ее по существу горизонтальной и поперечной ориентацией в рабочей конфигурации и ее по существу горизонтальной ориентацией, по существу параллельной направлению А движения вперед в конфигурации транспортировки. В этой промежуточной конфигурации крепежной штанги 7 относительно шасси 2 рабочее орудие 15 расположено с наклоном относительно вертикальной плоскости, перпендикулярной к направлению А движения вперед.
Рабочее орудие 15 может занимать поднятое положение или поднятые положения относительно крепежной штанги 7, когда последняя находится в промежуточной конфигурации. В этом случае рабочее орудие 15 удалено от земли. Оно не касается лежащих на земле растений. На фиг. 8 показано, что рабочее орудие 15 может занимать второе поднятое положение по отношению к крепежной штанге 7, когда она находится в промежуточной конфигурации. На фиг.9 показано, что рабочее орудие 15 может занимать первое поднятое положение по отношению к крепежной штанге 7, когда она находится в промежуточной конфигурации. В частности, когда крепежная штанга 7 находится в промежуточной конфигурации, первый привод 39 можно привести в действие таким образом, чтобы переместить рабочее орудие 15 относительно крепежной штанги 7 из второго поперечного положения (см. фиг. 8) в первое поперечное положение (см. фиг. 9). Таким образом, внутренний боковой конец 16 рабочего орудия 15 приближают к центральной балке 3 шасси 2. Следовательно, когда крепежная штанга 7 впоследствии оказывается в своей конфигурации транспортировки, штанга 32, в частности, каждая штанга 32, соединяющая раму 29 рабочего орудия 15 с крепежной штангой 7, направлена вверх и вперед. За счет этого рабочее орудие 15 имеет выдвинутое вперед положение относительно крепежной штанги 7. При этом уменьшается общая длина машины 1 во время транспортировки.
Когда рабочее орудие 15 находится в поднятом положении, в частности, в каждом из первого и второго поднятых положений относительно крепежной штанги 7 в промежуточной конфигурации, наружный боковой конец 17 рабочего орудия 15 находится на большей высоте над землей, чем его внутренний боковой конец 16. Кроме того, наружный боковой конец 17 рабочего орудия 15 сдвинут назад дальше, чем внутренний боковой конец 16. Таким образом, в поднятом положении, в частности, в каждом из первого и второго поднятых положений относительно крепежной штанги 7 в промежуточной конфигурации рабочее орудие 15 имеет наклон относительно вертикальной плоскости, перпендикулярной к направлению А движения вперед. Кроме того, внутренний боковой конец 16 рабочего орудия 15 находится на большей высоте над землей в промежуточной конфигурации крепежной штанги 7, чем в рабочей конфигурации крепежной штанги 7, по отношению к шасси 2, в частности, когда рабочее орудие 15 занимает первое поперечное положение относительно крепежной штанги 7.
Промежуточная конфигурация крепежной штанги 7 является, например, конфигурацией прохождения валка. Поднятое положение рабочего орудия 15 относительно крепежной штанги 7 в промежуточной конфигурации является, например, положением прохождения валка рабочим орудием 15, обеспечивающим прохождение над уплотненным валком большой высоты. В этом поднятом положении вертикальное расстояние рабочего орудия 15 над землей является достаточно большим. Внутренний боковой конец 16 поднимается над землей на высоту, составляющую, например, от 500 до 1000 мм, тогда как наружный боковой конец 17 находится на расстоянии от земли, составляющем, например, от 800 до 1300 мм.
Второй привод 42 содержит средство разгрузки рабочего орудия 15 на земле. Для этого второй привод 42 содержит, например, домкрат, который одновременно выполняет функции подъема и разгрузки рабочего орудия 15 относительно крепежной штанги 7. Для разгрузки этот домкрат соединен, например, с аккумулятором давления. Во время работы крепежная штанга 7 в рабочей конфигурации остается неподвижной или по существу неподвижной относительно шасси 2. Именно второй привод 42, работающий в «плавающем» режиме, обеспечивает вертикальные движения рабочего орудия 15 относительно шасси 2, причем эти движения в определенной степени контролируются и амортизируются. Каждый второй привод 42, шарнирно соединенный с крепежной штангой 7 и с соответствующей штангой 32, содержит такое средство разгрузки. Кроме того, соответствующие шарнирные соединения каждой штанги 32 с рамой 29 рабочего орудия 15 и с крепежной штангой 7 выполнены с возможностью обеспечения поворота рабочего орудия 15 относительно крепежной штанги 7 в рабочей конфигурации вокруг виртуальной оси, по существу ориентированной в направлении А движения вперед. Благодаря этому средству разгрузки и этим шарнирным соединениям каждой штанги 32, штанги 32 могут во время работы перемещаться вертикально относительно крепежной штанги 7 независимо друг от друга. Таким образом, когда рабочее орудие 15 работает на неровном поле, его внутренний и наружный боковые концы 16 и 17 могут перемещаться вертикально в разных направлениях и/или с разными амплитудами. Кроме того, учитывая расположение каждой штанги 32 между второй центральной вертикальной плоскостью Р2 и соответствующим боковым концом 16, 17, каждая штанга 32 воспринимает по существу одинаковую часть усилий, которыми рабочее орудие 15 действует на эти штанги 32. Разгрузка рабочего орудия 15 уравновешена между двумя штангами 32. Разгрузка рабочего орудия 15 по его рабочей ширине является равномерной.
Показанный на фигурах вариант осуществления включает в себя два рабочих орудия 15, каждое из которых шарнирно соединено с шасси 2 при помощи соответствующей крепежной штанги 7, находящейся с соответствующей стороны шасси 2. На фиг. 1 и 2 показано только одно рабочее орудие 15, расположенное с правой стороны машины 1, при этом второе рабочее орудие 15 расположено с левой стороны машины 1.
Каждое рабочее орудие 15 содержит раму 29, соединенную с соответствующей крепежной штангой 7 при помощи соответствующего соединительного устройства 31. Путем приведения в действие по меньшей мере одного, в частности, каждого первого привода 39, связанного с соответствующим рабочим орудием 15, можно регулировать общую ширину работы машины 1. Первый привод 39, связанный с рабочим орудием 15, можно задействовать, когда крепежная штанга 7 находится в рабочей конфигурации или в промежуточной конфигурации. При этом соответствующие устройства подборки 20 и перемещения 21 более или менее удалены друг от друга, что позволяет изменять ширину центрального валка, получаемого из растений, подбираемых каждом устройством 20 подборки и перемещаемых каждым вращающимся устройством 21 перемещения в направлении центральной балки 3 шасси 2. Когда каждая крепежная штанга 7 находится в своей соответствующей рабочей конфигурации и по меньшей мере одно из рабочих орудий 15 находится во втором поперечном положении относительно соответствующей крепежной штанги 7, то есть это рабочее орудие 15 находится в своем втором рабочем положении, внутренние боковые концы 16 этих рабочих орудий 15 удалены друг от друга перпендикулярно к направлению А движения вперед. В частности, каждое рабочее орудие 15 может находиться во втором поперечном положении относительно крепежной штанги 7 в рабочей конфигурации, то есть каждое рабочее орудие 15 находится при этом во втором рабочем положении. Расстояние, разделяющее соответствующие внутренние боковые концы 16 позволяет формировать центральный валок, укладываемый между двумя рабочими орудиями 15, например, из боковых валков, подбираемых каждым соответствующим рабочим орудием 15. Когда каждая крепежная штанга 7 находится в своей соответствующей рабочей конфигурации и каждое рабочее орудие 15 находится в первом поперечном положении относительно соответствующей крепежной штанги 7, то есть когда каждое рабочее орудие 15 находится в своем первом рабочем положении, внутренние боковые концы 16 этих рабочих орудий 15 расположены рядом друг с другом. Это расположение рабочих орудий 15 позволяет формировать валок, укладываемый с левой или с правой стороны машины 1, например, из непрерывной ширины подбираемых растений, например, из лежащих на земле скошенных или высушенных растений.
Перевод машины из рабочей ситуации в ситуацию транспортировки включает в себя, например, следующие этапы. Рабочее орудие 15, находящееся на крепежной штанге 7 в рабочей конфигурации, на первом этапе поднимают над землей посредством приведения в действие второго привода или вторых приводов 42. Это вертикальное перемещение осуществляют, сохраняя поперечное положение рабочего орудия 15 относительно крепежной штанги 7. Затем крепежную штангу 7 перемещают из ее рабочей конфигурации в ее промежуточную конфигурацию. Если рабочее орудие 15 оказывается относительно крепежной штанги 7 в поперечном положении, отличном от первого поперечного положения, его перемещают при помощи первого привода 39 для приведения в это первое поперечное положение. Наконец, крепежную штангу 7 складывают вверх и назад, пока она не достигнет своей конфигурации транспортировки.
Сельскохозяйственная машина 1 для заготовки растительных кормов в соответствии с изобретением может быть косилкой. На такой машине рабочее орудие выполнено с возможностью производства сенокосных работ. Такое рабочее орудие содержит, например, косилочное устройство, содержащее брус, вдоль которого расположены диски или барабаны, оснащенные ножами. За этим косилочным устройством может находиться устройство кондиционирования с пальцами, цепами или роликами и/или устройство укладки в валки, содержащее один или несколько отражателей, или ленточный или роликовый конвейер для перемещения скошенных растений поперечно к направлению движения. Такая машина, содержит, например, два таких рабочих орудия, каждое из которых установлено с соответствующей стороны шасси.
Сельскохозяйственная машина 1 для заготовки растительных кормов в соответствии с изобретением может быть навесной машиной, например, машиной, подвешенной сзади трактора. На такой машине шасси содержит центральную балку, оборудованную устройством сцепки, выполненным с возможностью соединения с трехточечной сцепкой трактора.
Разумеется, изобретение не ограничивается вариантами и версиями осуществления, описанными выше и представленными на фигурах. В него можно вносить изменения, в частности, что касается состава, расположения или числа различных элементов, путем применения различных комбинаций вышеуказанных отличительных признаков или путем замены техническими эквивалентами, не выходя при этом за рамки объема защиты изобретения.
Реферат
Изобретение относится к сельскохозяйственному машиностроению. Сельскохозяйственная машина для заготовки фуража содержит штангу, выполненную с возможностью перемещения между рабочей и транспортировочной конфигурациями, орудие и соединительное устройство. Орудие содержит боковые концы и может занимать одно рабочее положение и одно другое положение. Рабочее орудие соединено со штангой посредством соединительного устройства, которое обеспечивает первое перемещение орудия относительно штанги. Соединительное устройство содержит средства, обеспечивающие второе поперечное и горизонтальное перемещение орудия относительно штанги и позволяющие осуществлять это второе перемещение независимо от первого перемещения. Соединительное устройство содержит штангу, ориентированную в направлении движения вперед, когда крепежная штанга находится в рабочей конфигурации. Штанга шарнирно соединена с крепежной штангой вокруг первой оси, поперечной и горизонтальной, когда крепежная штанга находится в рабочей конфигурации. За счет поворота вокруг первой оси эта штанга может перемещаться вертикально относительно крепежной штанги в рабочей конфигурации. Сельскохозяйственная машина обеспечивает эффективную работу по заготовке фуража. 34 з.п. ф-лы, 9 ил.
Комментарии