Землеобрабатывающая машина с системой прочистки засорения и способ работы - RU2603024C2
Код документа: RU2603024C2
Чертежи
Описание
Область техники, к которой относится изобретение
Описана землеобрабатывающая машина с взаимодействующим землей колесом, а более конкретно система управления для поднятия взаимодействующего с землей колеса в ответ на отсутствие вращения колеса.
Уровень техники
На Среднем Западе Соединенных Штатов широко практикуется применение способов минимальной обработки или способов без обработки почвы, при которых остатки сельскохозяйственных культур остаются в поле. В результате в сеялках обычно используют колеса очистителей рядов. Колеса очистителей рядов вычищают остатки предыдущей сельскохозяйственной культуры и почвенные комки с пути высевающей секции для удаления пожнивных остатков и очистки земли. Это обеспечивает более однородные окружающие условия для размещения семян в почве и вычищает остатки из области, непосредственно окружающей семена для облегчения прогревания почвы и уменьшения вероятности вредного воздействия заболеваний и грибов на появляющиеся всходы.
Большинство колес очистителей рядов выполнено с возможностью очистки дорожки шириной с копирующие колеса высевающей секции. Для определения достаточного тягового усилия для сохранения вращения колес колеса очистителей рядов использовали в условиях напряжения при обработке почвы. Плавающие колеса очистителей рядов часто используют в сочетании с ротационными мотыгами для регулирования заглубления и обеспечения дополнительного тягового усилия для сохранения вращения колес очистителя. При посеве с обработкой стеблей кукурузы клубки корней и стеблей могут легко захватывать спереди колеса очистителей рядов и останавливать вращение колес. Тогда высевающая секция начинает толкать груду остатков и почвы. Требуется всего лишь несколько секунд, чтобы груда стала достаточно большой, чтобы задевать ряды с каждой стороны закупоренного ряда. Сеялку необходимо останавливать и поднимать и перемещать над грудой, чтобы счистить груду. Если оператор не хочет оставлять пространство без растений в поле, груду остатков и почвы необходимо вручную перемещать в сторону, вместо того, чтобы поднимать сеялку, чтобы передвинуть через груду. На это уходит много времени, при этом уменьшается эффективность посева.
Раскрытие изобретения
Предложена землеобрабатывающая машина, имеющая раму, взаимодействующее с землей колесо, установленное на раме и выполненное с возможностью перемещения между поднятым положением без взаимодействия с землей и рабочим положением с взаимодействием с землей. Взаимодействующее с землей колесо, находясь в рабочем положении, вращается вокруг оси колеса при перемещении машины по полю. Предусмотрена система управления, имеющая датчик для определения вращения взаимодействующего с землей колеса, контроллер, принимающий входной сигнал от датчика, и исполнительный механизм для поднятия взаимодействующего с землей колеса, когда датчик определяет, что взаимодействующее с землей колесо не вращается.
Краткое описание чертежей
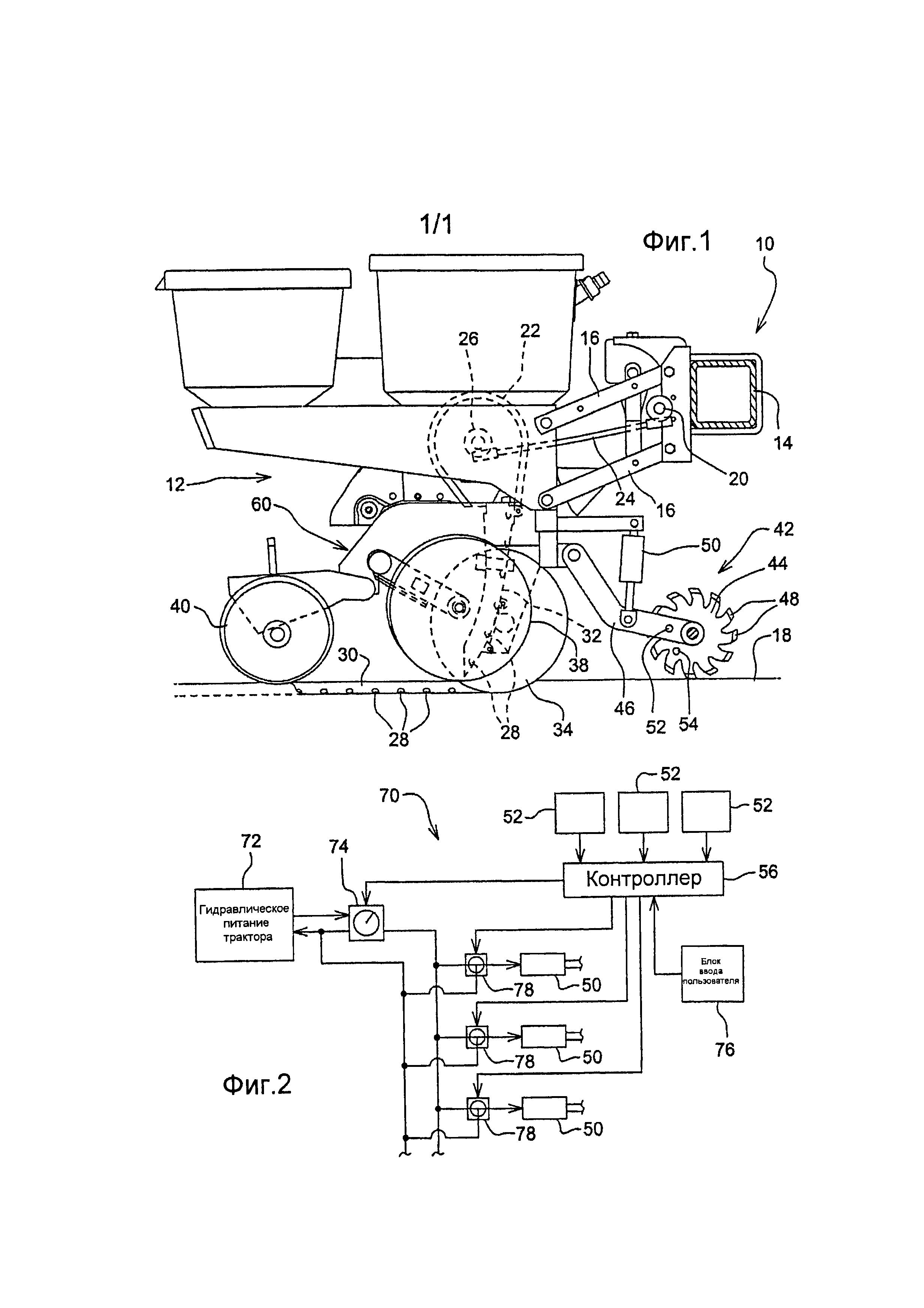
Фиг.1 представляет собой вид сбоку землеобрабатывающей машины, иллюстрирующий высевающую секцию машины.
Фиг.2 иллюстрирует систему управления для поднятия взаимодействующего с землей колеса машины в ответ на то, что взаимодействующее с землей колесо больше не вращается.
Подробное описание изобретения
Со ссылкой на фиг.1, показана одна высевающая секция 12 обрабатывающей землю машины 10. Землеобрабатывающая машина 10 представлена в виде посевной машины, а более конкретно в виде сеялки для пропашных культур, но она может относиться к любому типу машин, имеющих по меньшей мере одно вращающееся колесо, взаимодействующее с землей и обрабатывающее землю при перемещении машины по земле. Машина 10 имеет множество отдельных высевающих секций 12, соединенных с поперечным брусом для навешивания рабочих органов или рамой 14. Брус 14 для навешивания рабочих органов, в свою очередь, соединен с трактором (не показан) для перемещения машины известным образом. Каждая высевающая секция 12, как правило, выполнена по существу идентично остальным, и вследствие этого показана и описана только единственная высевающая секция 12.
Высевающая секция 12 соединена с брусом 14 для навешивания рабочих органов через шарнирные элементы 16 рычажного механизма и вследствие этого является в целом подвижной в направлениях вертикально вверх и вниз для того, чтобы следовать контурам поля 18. Привод сеялки содержит главный вал 20 с приводом от колес, который находится на обратной стороне бруса 14 для навешивания рабочих органов и является источником или основным источником входной мощности каждого дозатора 22 семян. Гибкий приводной вал 24 соединяет главный вал 20 с трансмиссией 26. Выходным устройством трансмиссии является вал дозаторов 22 семян. Дозатор 22 семян используется для расположения семян 28 со средним предварительно заданным расстоянием друг от друга внутри борозды 30 для семян. Семена из дозатора семян размещаются в борозде через семяпровод 32.
Борозду 30 для семян формируют с помощью двойного дискового сошника 34. Копирующие колеса 38, расположенные по бокам и немного назад от дисков сошника, регулируют глубину, на которую диски сошника проникают в почву, и таким образом глубину борозды 30 для семян. Позади от копирующих колес находятся заделывающие диски или колеса 40, которые заделывают борозду за счет помещения почвы поверх семян. Спереди от сошника 34 находится очиститель 42 рядка, имеющий пару колес 44 очистителя, расположенных под углом в направлении вперед движения машины. Колеса 44 очистителя установлены на рычаг 46, который шарнирно установлен на раме 60 высевающей секции на ее переднем конце. Показано, что колеса 44 имеют множество зубцов или острых выступов 48, которые взаимодействуют с почвой и вращаются при перемещении машины по полю. Каждое колесо 44 вращается вокруг своей собственной оси. Вращение колес 44 заставляет остатки сельскохозяйственной культуры на поверхности почвы сдвигаться в поперечном направлении с пути сошника 34, оставляя очищенную почву для сошника. Это облегчает точное размещение семян в борозде 30 для семян и уменьшает вероятность сталкивания сельскохозяйственной культуры в борозду для семян, когда сошник толкает остатки сельскохозяйственной культуры, такие как кукурузные стебли, в борозду для семян, создавая нежелательное окружение для семян. Положение рычага 46 регулируют с помощью линейного исполнительного механизма 50, который поднимает и опускает рычаг 46 между рабочим положением, в котором колеса 44 взаимодействуют с землей, и поднятым положением, в котором колеса не взаимодействуют. Исполнительный механизм 50 может представлять собой пневматический цилиндр, гидравлический цилиндр, приводимый в действие от двигателя винт и т.д. Точная форма исполнительного механизма не важна. Некоторые имеющиеся на рынке изделия очистителей рядов включают 2967 E-Series Residue Manager от Yetter Manufacturing Inc. Colchester, Illinois, Clean Sweep, поставляемый Precision Planting of Tremont, Illinois, и Ground Effects (Gfx) Floating Row Cleaner от Dawn Equipment Company of Sycamore, Illinois. Некоторые очистители рядов являются «плавающими», что означает, что очиститель ряда не прикреплен к раме высевающей секции, а является свободным, чтобы следовать контурам почвы. Другие очистители рядов имеют фиксированное положение относительно рамы высевающей секции с управлением от линейного исполнительного механизма 50.
В определенных полевых условиях остатки сельскохозяйственной культуры, такие как клубки корней и стебли кукурузы, могут легко захватывать колеса очистителя ряда и останавливать вращение колес. Затем высевающая секция начинает толкать груду остатков и почвы. Только несколько секунд требуется, чтобы груда стала достаточно большой для того, чтобы задевать ряды с каждой стороны закупоренного ряда. Для исправления данной проблемы машину необходимо остановить и поднять и передвинуть над грудой, чтобы счистить груду. Если оператор не хочет оставлять пространство без растений в поле, груду остатков и почвы необходимо вручную переместить в сторону, вместо того, чтобы поднимать сеялку для того, чтобы передвинуть через груду. Для уменьшения перебоя, вызываемого закупориванием колеса очистителя ряда, колеса 44 снабжают датчиком 52 вращения колес на рычаге 46. Датчик 52 может представлять собой магнитный датчик с магнитом 54, установленным на колесе 44 очистителя и обнаруживаемым датчиком 52, когда магнит 54 проходит датчик. Датчик 52 выдает выходной сигнал, передаваемый в контроллер 56, показанный на фиг.2. Для определения вращения колес очистителя может быть использован любой из множества датчиков. Они включают индуктивные датчики, датчики расстояния, оптические датчики, датчики на эффекте Холла и т.д. Оптический датчик может быть установлен дистанционно от колеса. Кроме того, на раму может быть установлена видеокамера в определенном местоположении для отображения колес очистителей на множестве высевающих секций и совместно с анализирующим программным обеспечением для определения, какое колесо очистителя не вращается для корректирующего воздействия. Когда датчик вращения определяет, что колесо очистителя не вращается, система 70 управления, показанная на фиг.2, действует с поднятием остановившегося колеса очистителя, позволяя поднять колесо очистителя над накопившейся грудой остатков сельскохозяйственной культуры. Затем колесо очистителя возвращается в рабочее положение.
В проиллюстрированной системе 70 управления линейным исполнительным механизмом является гидравлический цилиндр, при этом давление гидравлической жидкости обеспечивается за счет гидравлического питания 72 трактора. Гидравлическим давлением в системе управляет клапан 74 через электрический входной сигнал от контроллера 56. Блок 76 ввода пользователя в контроллер позволяет оператору устанавливать давление системы. Отдельные клапаны 78 управления работают, подавая давление гидравлической жидкости в линейные исполнительные механизмы 50. Исполнительные механизмы 50 представляют собой гидроцилиндры одностороннего действия с пружинным возвратом, так что когда из цилиндра удаляют гидравлическое давление, пружинный возврат втягивает поршень исполнительного механизма, поднимая рычаг 46 и колеса 44 очистителя ряда. Когда один из датчиков 52 определяет, что соответствующее колесо очистителя не вращается, контроллер 56 выдает сигнал в соответствующий клапан 78 для ослабления гидравлического давления для исполнительного механизма 50, обеспечивая втягивание исполнительного механизма и поднятие колес очистителя. Спустя несколько секунд машина переместится, миновав груду остатков, тогда контроллер активирует клапан 78 для повторного нагнетания давления гидравлической жидкости для опускания еще раз очистителя ряда. Для очистки колеса очистителя так, чтобы оно снова вращалось, датчик и система управления работают автономно без входного сигнала от оператора.
Специалистам в данной области известно, что система 70 управления является только одной из множества возможных путей для очистки остатков с колеса очистителя. Исполнительные механизмы 50 также представляют собой только один возможный тип исполнительного механизма. С гидравлической системой может быть использован двухсторонний цилиндр, который функционирует как с поднятием, так и с опусканием колеса очистителя.
В описанной системе колеса очистителя каждой высевающей секции работают независимо. Это обеспечивает максимальное преимущество в смысле очистки засора без прерывания работы других высевающих секций машины. Но это также добавляет значительно большую стоимость в смысле дополнительных клапанов в системе управления. В менее затратной системе используется один исполнительный механизм для поднятия множества колес очистителей, например комплекта колес очистителей. Еще более простой системой является система, которая поднимает всю машину, когда одно колесо очистителя останавливает вращение. Несмотря на то, что она затрагивает всю машину и по-прежнему оставляет пропуск в поле, когда машина поднята, она все-таки обеспечивает преимущество автоматического определения засоренных колес очистителя и исправления, а не полагается на оператора, который должен заметить проблему перед тем, как предпринять корректирующее действие.
Несмотря на то, что система была описана в контексте очистки засоренного колеса очистителя рядка, специалистам в данной области техники следует понимать, что система может быть использована для любого взаимодействующего с землей колеса на машине. Колеса высевающей секции можно очистить за счет поднятия отдельного колеса или за счет поднятия всей высевающей секции.
Отсутствует необходимость в том, чтобы система 70 управления была задействована все время, а только когда машина работает в поле. Например, когда машину разворачивают в конце поля, машину сначала поднимают. После поднятия колеса очистителя будут находится вне земли и таким образом без вращения. Но в данном месте нет необходимости определять отсутствие вращения колес очистителя. Таким образом, необходим входной сигнал в систему управления о рабочем состоянии машины. Для определения, находится ли машина в работе, могут быть использованы различные способы. Один способ состоит в том, чтобы определить положение бруса 14 для навешивания рабочих органов машины, поднят ли брус для навешивания рабочих органов для поворота в конце ряда или для транспортировки или брус для навешивания рабочих органов опущен для работы в поле. Положение бруса для навешивания рабочих органов и входной сигнал скорости машины обеспечит возможность определения использования машины. Если брус для навешивания рабочих органов опущен, но не двигается, отсутствует необходимость в определении вращение колес очистителя. Только когда брус для навешивания рабочих органов опущен и находится в движении, необходимо вращение колес очистителя. Движение машины можно определить с помощью отдельного датчика скорости машины, посредством изменений при определении местоположения с GPS или с помощью состояния трансмиссии/двигателя трактора и т.д. Любой из приведенных выше способов (и другие) может быть использован для определения, когда необходимо отслеживать вращение колес очистителя.
После описания системы становится понятно, что могут быть выполнены различные изменения, не выходящие за рамки объема изобретения, который определен в приложенной формуле изобретения.
Реферат
Изобретение относится кобласти сельскохозяйственного машиностроения, в частности к землеобрабатывающим орудиям с системой управления поднятия взаимодействующего с землей рабочего органа и способу работы такого орудия. Землеобрабатывающая машина в составе посевной машины содержит раму с установленными на ней и выполненными с возможностью перемещения между поднятым положением без взаимодействия с землей и рабочим положением с взаимодействием с землей колесами очистителя для удаления остатков сельскохозяйственных культур в рядах. Система управления содержит датчик для определения вращения взаимодействующих с землей колес очистителя и контроллер, который принимает входной сигнал от датчика. Контроллер выдает команду исполнительному механизму на поднятие колес очистителя, когда датчик определяет, что оно не вращается, и их опускание после прохождения препятствия. Такое техническое решение направлено на сокращение трудозатрат при повышении эффективности посева. 2 н. и 8 з.п. ф-лы, 2 ил.
Формула
раму;
множество взаимодействующих с землей колес очистителя, установленных на раме и выполненных с возможностью перемещения между поднятым положением без взаимодействия с землей и рабочим положением с взаимодействием с землей, при этом отдельные взаимодействующие с землей колеса очистителя, находясь в рабочем положении, вращаются вокруг оси колеса при перемещении машины по земле и выполнены с возможностью удаления остатков сельскохозяйственных культур с рядов сельскохозяйственных культур, по которым проходит землеобрабатывающая машина;
исполнительный механизм, выполненный с возможностью перемещения по меньшей мере некоторых взаимодействующих с землей колес очистителя между поднятым и рабочим положениями; и
систему управления, включающую в себя датчик для определения вращения взаимодействующих с землей колес очистителя, контроллер, принимающий входной сигнал от датчика, при этом контроллер функционально соединен с исполнительным механизмом для выдачи сигнала исполнительному механизму для обеспечения поднятия взаимодействующих с землей колес очистителя исполнительным механизмом при получении входного сигнала от датчика, когда колеса очистителя встречаются с препятствием и датчик определяет, что взаимодействующие с землей колеса очистителя не вращаются, причем система управления обеспечивает входной сигнал для опускания колес очистителя после прохождения препятствия машиной.
перемещают машину по земле с взаимодействующим с землей колесом очистителя в рабочем положении, тем самым вызывая вращение взаимодействующего с землей колеса очистителя;
определяют вращение взаимодействующего с землей колеса очистителя; и
перемещают взаимодействующее с землей колесо очистителя в поднятое положение в случае остановки вращения взаимодействующего с землей колеса очистителя.
Комментарии