Механизм регулировки угла атаки почвообрабатывающих дисков - RU2621913C1
Код документа: RU2621913C1
Чертежи
Описание
Изобретение относится к области сельского хозяйства, в частности к сельскохозяйственному машиностроению.
Известен механизм регулировки угла атаки многодисковой секции со стойками, закрепленными на одной секции рамы, в котором одна стойка секции перемещается в пазу кронштейна для ее крепления, при этом вторая стойка в круглом отверстии своего кронштейна поворачивается относительно своей оси (Борона дисковая тяжелая БДТ-7. Руководство по эксплуатации, стр. 4, 6, 16). Одним таким механизмом можно выполнить регулировку угла атаки только одной дисковой секции. Для регулировки угла атаки ряда дисков, дисковых секций, установленных на индивидуальных стойках, такой механизм не используют, а применяют механизм групповой регулировки их угла атаки.
Известен механизм групповой регулировки угла атаки всего ряда дисковых рабочих органов, установленных на раме на индивидуальных стойках (пат. РФ №2567 008 А01В 21/08). Механизм выполнен в виде тяги, шарнирно соединенной с поводками на стойках дисков, и талрепа, закрепленного на раме и обеспечивающего перемещение тяги и поворот ряда стоек. Такой механизм позволяет регулировать угол атаки всего ряда дисковых рабочих органов, установленных на одной секции рамы.
Наиболее близкой конструкцией являются механизмы групповой регулировки угла атаки дисков, установленных на индивидуальных стойках в фронтальных дисковых боронах (дискаторах) с центральной и боковыми секциями, например четырехрядная борона БДМ-8×4ПШК (прототип - проспект ООО БДМ-Агро, Россия).
Недостатком известного механизма регулировки угла атаки является то, что на каждой секции для одного ряда дисков требуется отдельный механизм. Четырехрядная трехсекционная борона содержит 12 механизмов регулировки угла атаки: один механизм для каждого ряда дисков, установленных на каждой секции рамы. Регулировка трудоемка и небезопасна, так как эти механизмы на центральной секции доступны только при подъеме боковых секций бороны в транспортное положение.
Технической задачей изобретения является упрощение регулировки угла атаки почвообрабатывающих дисков, установленных на многосекционной раме орудия, сокращение времени на ее выполнение.
Техническая задача решается тем, что в механизме регулировки угла атаки почвообрабатывающих дисков, выполненном в виде жестких звеньев, шарнирно соединенных с поводками на стойках дисков каждой секции рамы, и устройств перемещения звеньев и поворота стоек ряда дисков, согласно изобретению жесткие звенья всего ряда стоек соединены гибкими звеньями, которые при размещении секций рамы в одной плоскости расположены на одной линии с осями шарниров соединения секций, оси поворота гибких звеньев на жестком звене центральной секции рамы размещены между осями шарниров соединения секций рамы или совмещены с одной из них при крайнем положении общей тяги, устройство перемещения общей тяги установлено на одной боковой секции рамы и соединено с жестким звеном этой секции, а жесткое звено другой боковой секции рамы снабжено пружиной с закрепленным на этой секции устройством ее деформации, например натяжения.
Кроме того, устройство перемещения жесткого звена установлено на боковой секции рамы со стороны, в которую ряд дисков обращен вогнутостью сферы, а оси поворота гибких звеньев, расположенные на жестких звеньях боковых секций рамы, размещены снаружи участка между осями шарниров соединения центральной и боковых секций рамы, а устройство деформации пружины выполнено в виде винтового механизма, закрепленного на боковой секции рамы и гидроцилиндра, корпус или шток которого соединен с жестким звеном тяги.
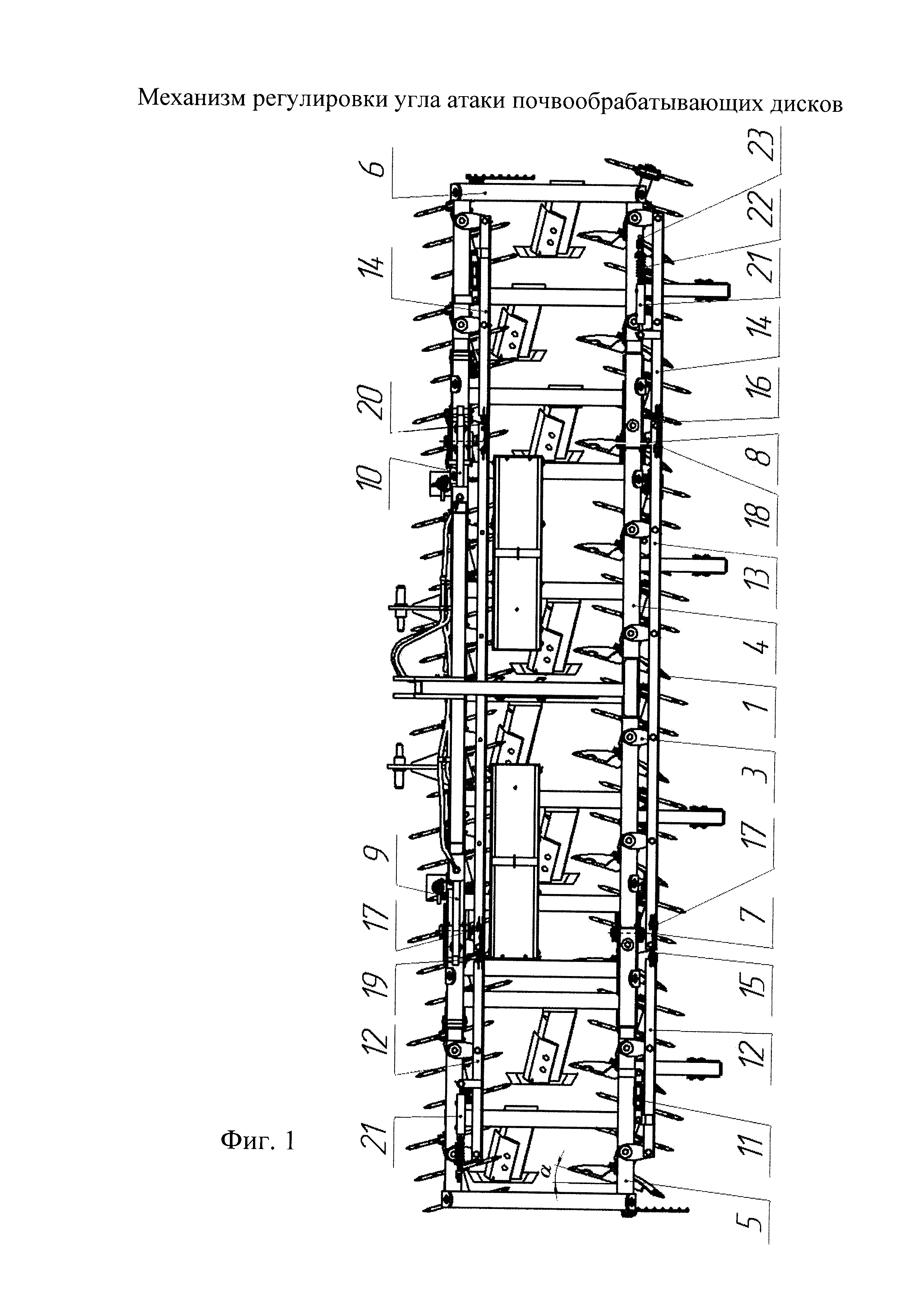
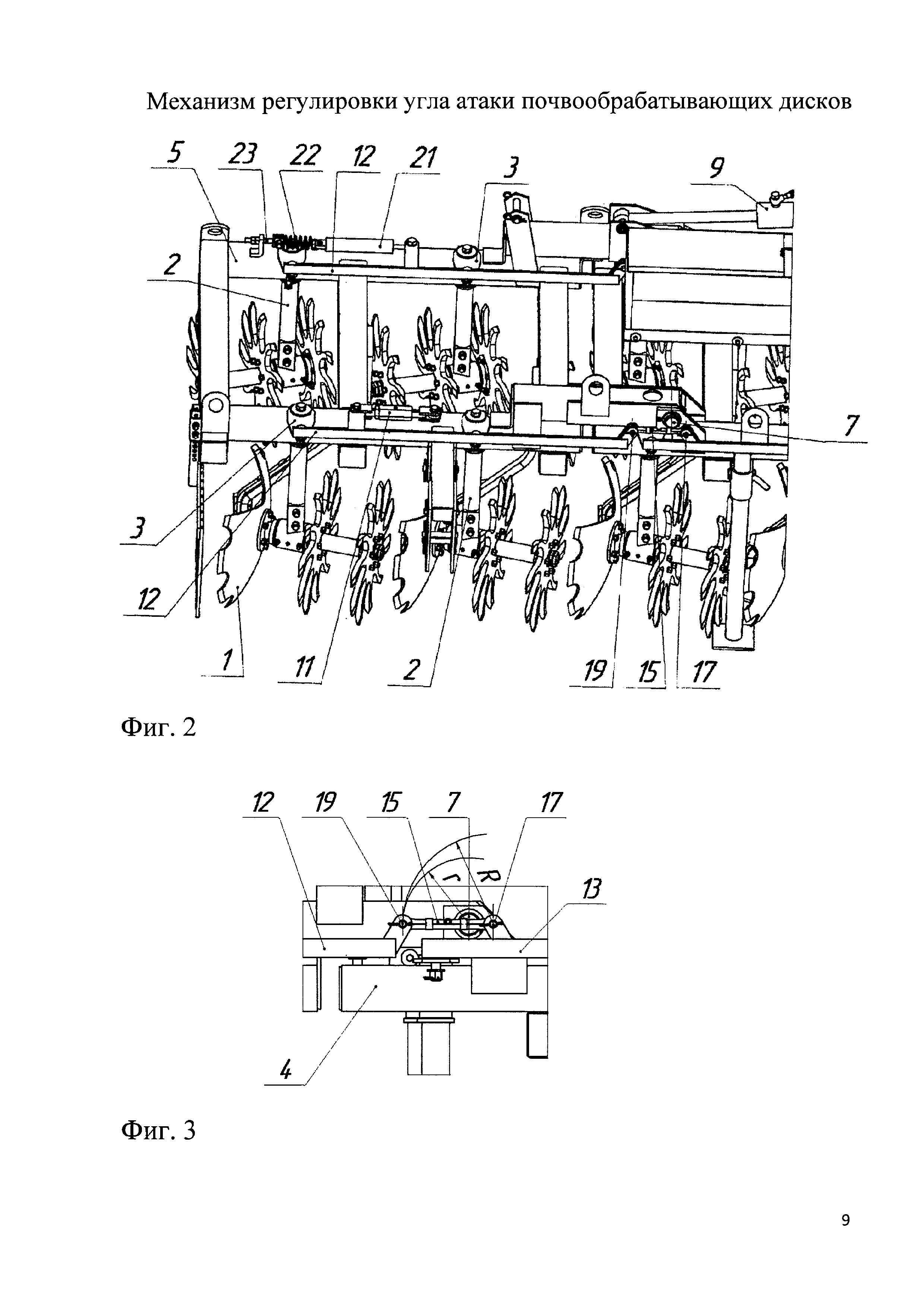
Механизмы регулировки угла атаки почвообрабатывающих дисков показан на фиг. 1 - вид механизма сверху на двухрядной трехсекционной бороне; на фиг. 2 - вид сверху сзади секции рамы бороны, содержащей участок тяги с талрепом на задней балке рамы, и пружинный механизм, гидроцилиндр и натяжное устройство - на передней балке; на фиг. 3 - гибкое звено для соединения жестких звеньев тяги.
Механизм регулировки угла α атаки почвообрабатывающих дисков показан на примере двухрядной бороны, в которой диски со стойками установлены на шарнирно соединенных центральной и боковых секциях ее рамы.
Механизм регулировки угла α атаки почвообрабатывающих дисков содержит ряд дисковых рабочих органов (дисков) 1 с поворотной стойкой 2 и ее поводком 3, установленных на центральной 4 и боковых 5 и 6 секциях рамы орудия, соединенных шарнирами 7 и 8 и гидроцилиндрами 9 и 10, установленными на центральной секции 4. Он содержит устройство, например талреп 11, перемещения тяги, общей для ряда дисков 1, состоящей из жестких 12, 13 и 14 звеньев, шарнирно соединенных с поводками 3 ряда дисковых рабочих органов 1, и гибких звеньев 15 и 16, соединенных посредством шарниров с осями поворота 17 и 18 к звену 13 тяги на центральной секции рамы и посредством шарниров с осями поворота 19 и 20 - к звеньям 12 и 14 тяги на ее боковых секциях 5 и 6. Звенья тяги 12, 13 и 14 выполнены с вертикальным ребром жесткости.
При размещении всех секций рамы в одной плоскости оси шарниров 7 и 8 рамы и гибкие звенья 15 и 16 лежат на одной линии. Расстояние между осями 17 и 19, 18 и 20 больше длины пути перемещения шарниров 19 и 20 при изменении угла атаки от минимального до максимального. При максимальном и при минимальном угле атаки дисков оси 17 и 18 на звене тяги 13 расположены между осями шарниров 7 и 8 соединения секций рамы или в крайнем положении тяги, ось одного из них может быть совмещена с осью одного из шарниров 7 или 8. При этом оси шарниров 19 и 20 размещены с наружных сторон промежутка между осями шарниров 7 и 8 или ось одного из них при крайнем положении тяги может быть совмещена с осью шарнира 7 или 8.
При отклонении рам боковых секций 5 и 6 от плоскости центральной секции 4, в том числе при их транспортном складывании, расстояние между шарнирами 17 и 19, 18 и 20 уменьшается несущественно или остается неизменным при совпадении оси шарнира 17 с осью 7 или 18 - с осью 8. Указанное размещение осей поворота гибких звеньев относительно осей шарниров соединения секций рамы позволяет при ее транспортном складывании расслабить гибкие звенья.
Талреп 11 соединен с жестким боковым звеном 12 тяги и установлен на боковой 5 секции рамы, расположенной со стороны, в которую ряд дисков обращен вогнутостью сферы (на стороне, противоположной направлению реакции почвы на дисках регулируемого ряда). На сферических дисках 1, установленных с углом атаки, реакция почвы направлена в сторону их выпуклости. Талреп 11 позволяет установить и минимальный и максимальный углы атаки дисков 1 и имеет шкалу, указывающую его величину.
На другой боковой секции 6 рамы к жесткому звену 14 тяги присоединен шток гидроцилиндра 21, а к его корпусу - пружина 22, вторым концом закрепленная на винтовом механизме 23 для регулировки ее натяжения, установленном на боковой секции 6 рамы. Пружину 22 натягивает гидроцилиндр 21 при перемещении его штока в корпус. При изменении угла атаки на 3…5° регулировка натяжения пружины 22 винтовым механизмом не обязательна, так как при этом сила ее деформации изменяется незначительно: тяга, установленная на поводках 3 при их длине 120…140 мм, перемещается лишь на 6…12 мм.
На многорядной бороне гидроцилиндры 21 всех рядов стоек дисков управляются одной ручкой гидрораспределителя трактора. Гидроцилиндр 21 при выдвинутом штоке ослабляет натяжение пружины 22 для облегчения выполнения регулировки талрепом. Пружина 22 необходима для натяжения гибких звеньев 15, 16 и подтягивания всех звеньев тяги в сторону уменьшения угла атаки всего ряда дисков настолько, насколько позволяет талреп 11, а также при подъеме в транспортное положение и опускании боковых секций в рабочее положение и при их рабочих колебаниях в поперечно-вертикальной плоскости. Винтовой механизм 23 натяжения пружины 22 необходим для регулировки силы ее натяжения при изменении угла α атаки дисков от минимального к максимальному или наоборот.
Перед началом регулировки угла атаки шток гидроцилиндра 21 выдвигают до полного расслабления (сжатия) пружины 22. Затем вручную талрепом 11 по шкале устанавливают требуемый угол атаки каждого ряда дисковых рабочих органов 1, размещенных на секциях 4, 5, 6 рамы. Талреп 11, соединенный с жестким звеном 12 тяги на боковой секции 5, поворачивает стойки 2 дисков 1 и при этом обеспечивает требуемый угол их атаки. При перемещении тяги в сторону уменьшения угла α атаки гибкое звено 15, не натянутое пружиной 22, может изгибаться, и звенья тяг 13 и 14 не перемещаются. Далее, посредством механизма 23 перемещают гидроцилиндр 21 и таким путем регулируют натяжение пружины 22, которое создаст гидроцилиндр 21 при перемещении штока в его корпус. Сила натяжения пружины 21 должна обеспечивать поворот стоек 2 ряда дисков 1, установленных на центральной 4 и боковой секции рамы, на которой установлен гидроцилиндр.
При работе ряда сферических дисков 1, установленных с углом атаки, реакция почвы и сила растянутой пружины 22 направлены в сторону их выпуклости, что гарантирует сохранение угла их атаки, заданного при его регулировке. При копировании неровностей поля боковые секции 5 и 6 рамы могут на несколько градусов отклоняться от плоскости центральной секции 4. При этом на доли миллиметра может изменяться расстояние между шарнирами 17 и 19, 18 и 20 гибких звеньев 15 и 16, а стойки 2 в ряду, присоединенные к жестким звеньям 12, 13 и 14 тяги на секциях центральной 4 и боковой без талрепа 11, могут поворачиваться на угловые секунды, что практически не влияет на установленный угол атаки дисков.
При переводе многосекционной рамы в транспортное положение необходимо выдвинуть штоки гидроцилиндров 21, прекратить натяжение пружин 22 и их силовое воздействие на звенья тяги, затем гидроцилиндрами 9 и 10 поднять боковые секции 5 и 6 рамы. При их подъеме незначительно (на несколько миллиметров) уменьшается расстояние между осями шарниров 17 и 19, 18 и 20 и ослабевает натяжение гибких звеньев 15 и 16.
При переводе многосекционной рамы из транспортного положения в рабочее гидроцилиндрами 9 и 10 поворачивают и опускают боковые секции 5 и 6 рамы. Затем гидроцилиндрами 21 натягивают пружины 22, которые натянут гибкие звенья 15 и 16 тяги, а диски 1 всего ряда установят в положение, заданное при регулировке их угла атаки. При этом не требуется доступа к механизмам регулировки на центральной секции, влезания механизатора на ее раму или подъема боковых секций.
Применение предложенного механизма регулировки угла α атаки почвообрабатывающих дисков или дисковых секций позволит значительно упростить регулировку угла α атаки и в 2…3 раза сократить затраты времени на ее выполнение.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения, в частности к устройствам регулирования установки почвообрабатывающих рабочих органов. Механизм регулировки угла атаки почвообрабатывающих дисков выполнен в виде шарнирно соединенных с поводками жестких звеньев, снабженных устройством, например талрепом, для перемещения звеньев и поворота стоек с дисками. Диски установлены в ряд на шарнирно соединенных центральной секции и боковых секциях рамы, соединенных шарнирами и гидроцилиндрами. Жесткие звенья всего ряда дисковых рабочих органов на секциях рамы соединены гибкими звеньями, объединяющими все звенья в общую для ряда тягу, при этом оси шарниров для крепления гибких звеньев тяги и шарниров для соединения секций при их установке в одной плоскости расположены на одной линии. Оси шарниров для крепления гибких звеньев на жестком звене тяги на центральной секции размещены между осями шарниров поворота боковых секций рамы или одна из осей шарниров гибких звеньев совпадает с осью поворота боковой секции рамы при крайнем положении тяги. Устройство перемещения общей для ряда тяги установлено на боковой секции рамы со стороны, в которую ряд дисков обращен вогнутостью сферы, и присоединено к жесткому звену тяги на этой секции, а жесткое звено той же тяги на другой боковой секции рамы снабжено пружиной с закрепленным на этой секции рамы устройством ее деформации. Оси шарниров гибких звеньев, расположенных на звеньях тяги на боковых секциях рамы, размещены снаружи участка между осями шарниров соединения центральной и боковых секций рамы. Устройство для деформации пружины, например ее растяжения, выполнено в виде винтового механизма, закрепленного на боковой секции рамы и гидроцилиндра, корпус или шток которого соединен с жестким звеном тяги. 2 з.п. ф-лы, 3 ил.
Комментарии