Система и способ управления обработкой почвы сельскохозяйственным орудием (варианты) - RU2580449C2
Код документа: RU2580449C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] В общем, изобретение относится к оборудованию для обработки земли, такому как сельскохозяйственное оборудование, а более конкретно к системе и способу управления обработкой почвы сельскохозяйственным орудием.
УРОВЕНЬ ТЕХНИКИ
[0002] Посевные орудия обычно буксируют позади трактора или другого рабочего транспортного средства посредством установки кронштейна, закрепленного на жесткой раме орудия. Данные посевные орудия, как правило, содержат взаимодействующий с землей инструмент или сошник, который формирует посевную борозду для размещения семян в почву. Сошник используется для распахивания почвы, обеспечивая возможность размещения семян. После размещения семян за сошником следует прикатывающий каток, который уплотняет почву поверх размещенных семян.
[0003] Размещение семян на требуемой глубине ниже поверхности почвы способствует правильному развитию сельскохозяйственной культуры. Соответственно, орудие может буксироваться со скоростью, которая устанавливает гладкую обработку почвы по всему полю, облегчая за счет этого точное размещение семян. К сожалению, ограничение скорости рабочего транспортного средства увеличивает продолжительность процесса посадки или посева, понижая за счет этого эффективность сельскохозяйственных работ. Однако эксплуатация рабочего транспортного средства с более высокой скоростью может устанавливать нежелательно неровную обработку почвы в пределах некоторых областей поля, препятствуя за счет этого развитию сельскохозяйственной культуры.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] В одном варианте осуществления, система сельскохозяйственного орудия содержит высевающую секцию, выполненную с возможностью внесения сельскохозяйственного материала в почву в направлении движения. Система сельскохозяйственного орудия также содержит датчик, выполненный с возможностью выдачи сигнала, указывающего на почву, смещенную высевающей секцией, и контроллер орудия, соединенный с возможностью сообщения с датчиком. Контроллер орудия выполнен с возможностью определения гладкости обработки почвы позади высевающей секции в направлении движения на основании сигнала. Контроллер также выполнен с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона.
[0005] В еще одном варианте осуществления, способ управления обработкой почвы системой сельскохозяйственного орудия включает в себя этап, на котором принимают сигнал, указывающий на почву, смещенную высевающей секцией системы сельскохозяйственного орудия по мере того, как высевающая секция движется в направлении движения. Способ также включает в себя этапы, на которых определяют гладкость обработки почвы позади высевающей секции в направлении движения на основании сигнала и регулируют параметр, влияющий на обработку почвы, когда гладкость находится за пределами требуемого диапазона.
[0006] В дополнительном варианте осуществления, система сельскохозяйственного орудия содержит высевающую секцию, выполненную с возможностью внесения сельскохозяйственного материала в почву в направлении движения. Система сельскохозяйственного орудия также содержит бесконтактный датчик, направленный к области почвы позади высевающей секции в направлении движения. Бесконтактный датчик выполнен с возможностью выдачи первого сигнала, указывающего на гладкость обработки почвы в пределах области. Система сельскохозяйственного орудия дополнительно содержит контроллер орудия, соединенный с возможностью сообщения с бесконтактным датчиком. Контроллер орудия выполнен с возможностью определения требуемой скорости системы сельскохозяйственного орудия на основании первого сигнала и выдачи второго сигнала, указывающего на требуемую скорость, контроллеру рабочего транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Данные и другие признаки, аспекты, и преимущества представленного изобретения станут лучше понятны при чтении следующего подробного описания со ссылкой на сопровождающие чертежи, на которых одинаковые позиции представляют одинаковые детали на всех чертежах, при этом:
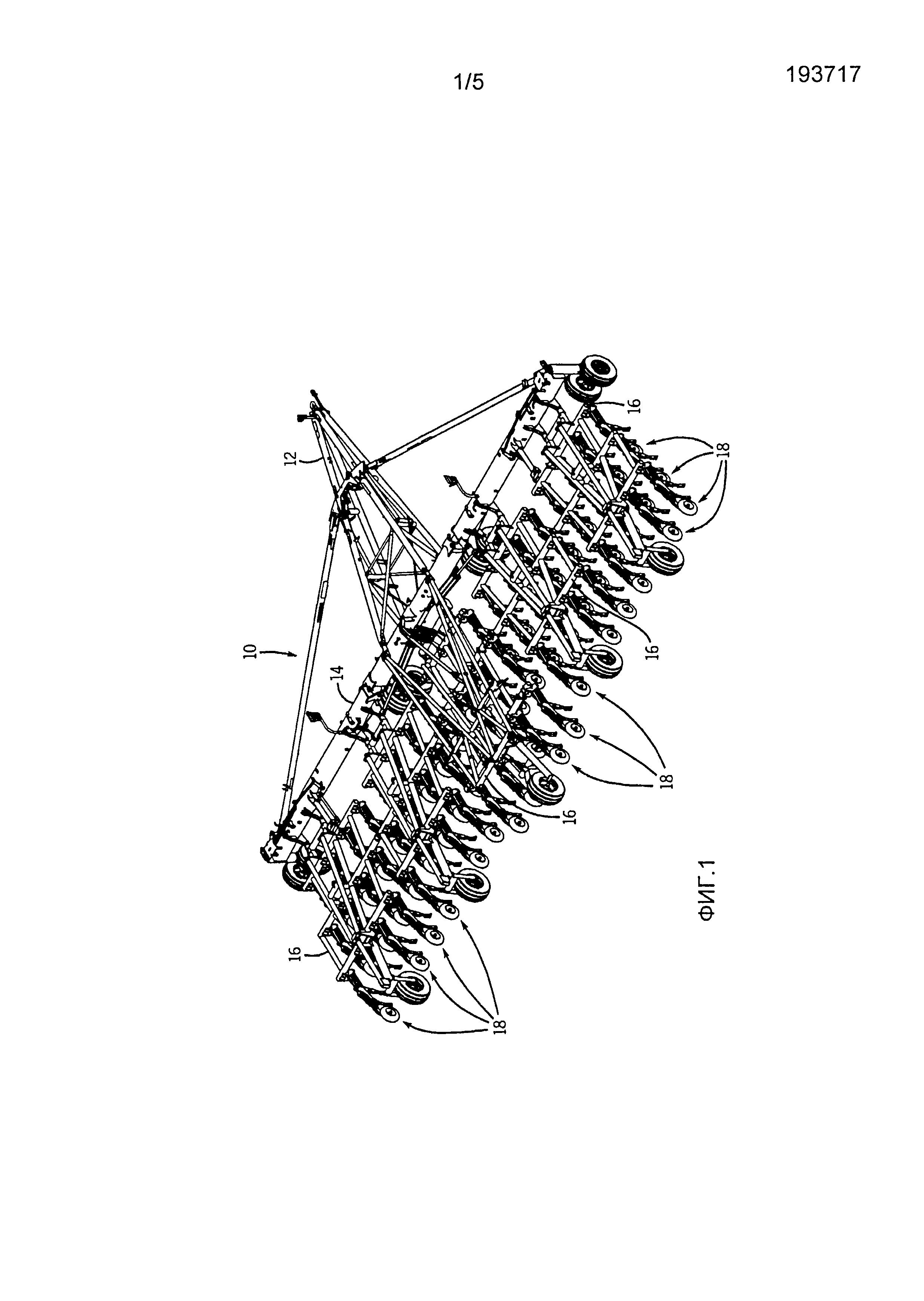
[0008] Фиг. 1 представляет собой общий вид примерного сельскохозяйственного орудия, которое может содержать систему управления обработкой почвы;
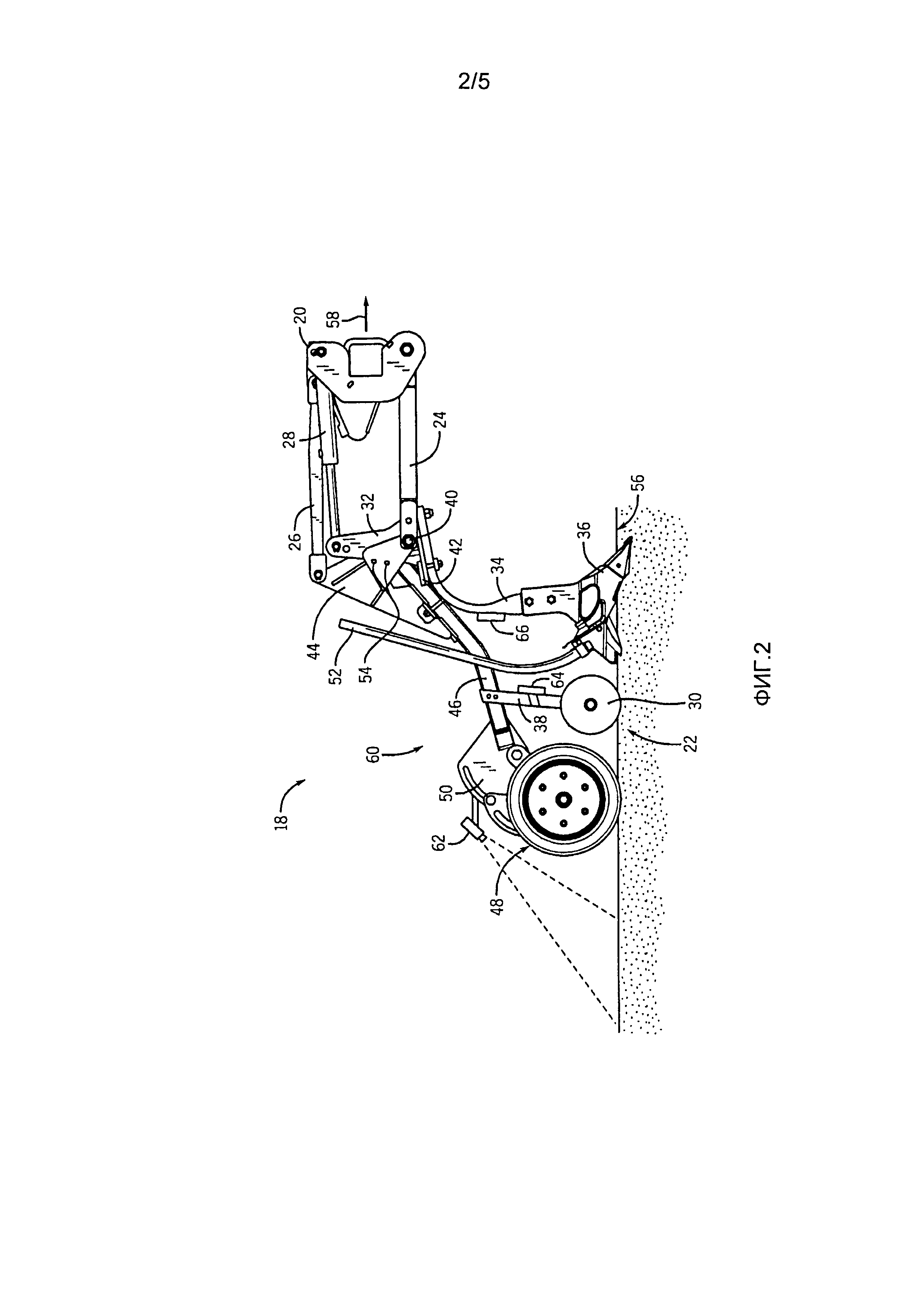
[0009] Фиг. 2 представляет собой вид сбоку примерной высевающей секции, которая может быть использована в сельскохозяйственном орудии по фиг. 1;
[0010] Фиг. 3 представляет собой схематичное изображение варианта осуществления системы управления обработкой почвы, которая может быть использована в сельскохозяйственном орудии по фиг. 1;
[0011] Фиг. 4 представляет собой изображение примерного профиля обработки почвы, производимого высевающей секцией по фиг. 2;
[0012] Фиг. 5 представляет собой примерный график усилия, прикладываемого к элементу высевающей секции по фиг. 2; а
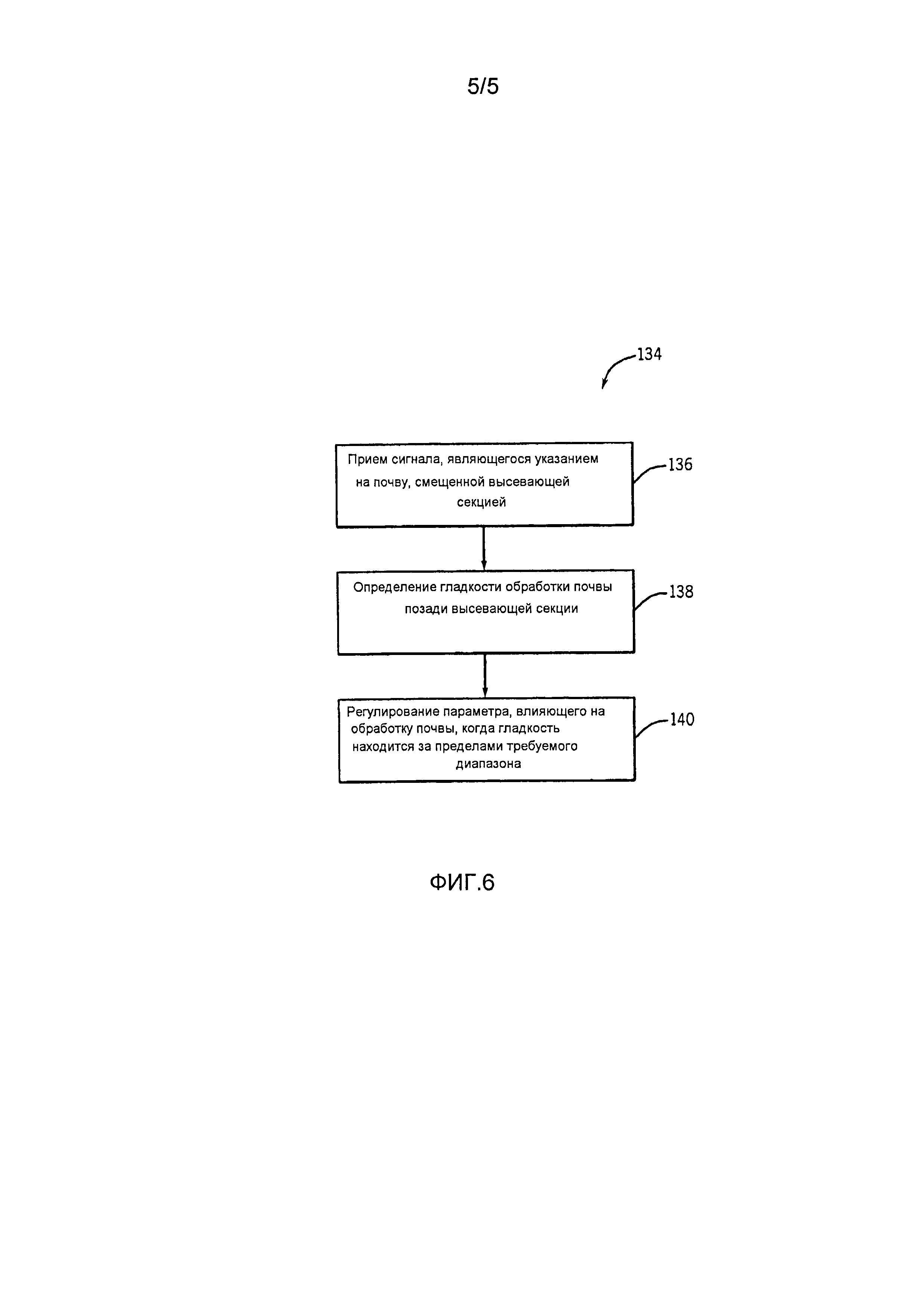
[0013] Фиг. 6 представляет собой блок-схему последовательности операций для варианта осуществления способа управления обработкой почвы сельскохозяйственным орудием.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0014] Обращаясь теперь к чертежам, фиг. 1 представляет собой общий вид сельскохозяйственного орудия 10. Орудие 10 выполнено с возможностью буксирования позади рабочего транспортного средства, такого как трактор. Орудие 10 включает в себя узел 12 буксирной тяги, который показан в виде узла сцепки с A-образной рамой. Узел 12 буксирной тяги может включать в себя сцепку, используемую для прикрепления к соответствующей сцепке трактора посредством сцепного шара, серьги или другого соединения. Узел 12 буксирной тяги соединен с тягой 14 для навешивания рабочих органов, которая поддерживает множество инструментальных рам 16. Каждая инструментальная рама 16 включает в себя множество высевающих секций 18, таких как проиллюстрированные анкерные сошники. Как обсуждается подробно ниже, сельскохозяйственное орудие 10 включает в себя систему управления обработкой почвы, выполненную с возможностью определения гладкости обработки почвы позади орудия и с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона.
[0015] Фиг. 2 представляет собой вид сбоку примерной высевающей секции 18, которая может быть использована в сельскохозяйственном орудии 10 по фиг. 1. Как проиллюстрировано, высевающая секция 18 включает в себя опору 20 рамы, узел 22 заделывающего диска, первый элемент 24, второй элемент 26 и исполнительный механизм 28 сошника, такой как линейный исполнительный механизм (например, узел гидравлического и/или пневматического поршневого цилиндра). Исполнительный механизм 28 сошника может быть гидравлически соединен с источником питания, который предоставляет поток находящейся под давлением гидравлической жидкой среды, который перемещает поршневой шток, тянущийся из цилиндра исполнительного механизма 28. Опора 20 рамы выполнена с возможностью состыковки с инструментальной рамой 16, прикрепляя посредством этого высевающую секцию 18 к сельскохозяйственному орудию 10. Например, вдоль инструментальной рамы 16 может быть установлено параллельно множество высевающих секций 18 с образованием высевающего блока. В проиллюстрированном варианте осуществления, высевающая секция 18 обеспечивает возможность заглубления сошника, подлежащего регулированию, с помощью прикрепленного прикатывающего колеса, обеспечивая за счет этого возможность независимого регулирования каждого сошника высевающего блока для улучшенного качества посева. Например, глубина почвенного углубления или желобка, создаваемого высевающей секцией 18, может увеличиваться по мере того, как прикатывающий каток заглубляет сошник в почву.
[0016] В представленной конфигурации, первый элемент 24, второй элемент 26 и опора 20 рамы образуют элементы параллелограммного навесного устройства, также известного как шарнирный четырехугольник. Как проиллюстрировано, узел 22 заделывающего диска включает в себя по меньшей мере один заделывающий диск 30, соединенный с высевающей секцией 18 посредством узла кронштейна. Заделывающий диск 30 может быть выполнен с возможностью направления почвы в углубление, устанавливая за счет этого улучшенные почвенные условия для роста семян. Следует понимать, что составные элементы высевающей секции 18, такие как опора 20 рамы, первый элемент 24 и второй элемент 26, могут быть изготовлены из любого подходящего материала, такого как сталь.
[0017] Исполнительный механизм 28 сошника крепится к переходнику 32 стойки посредством штифта на конце поршневого штока. Переходник 32 стойки также соединен со стойкой 34 и взаимодействующим с землей сошником 36. Переходник 32 стойки соединен со стойкой 34 посредством крепежных средств, облегчая за счет этого регулирование положения сошника 36, который, наряду с прикатывающим колесом, обеспечивает возможность изменения глубины посева для высевающей секции. Кроме того, положение заделывающего диска 30 можно регулировать посредством кронштейна 38. Кронштейн 38 обеспечивает возможность направления почвы заделывающим диском 30 в нужном направлении посредством регулирования кронштейна 38 по высоте и/или по углу. В проиллюстрированном варианте осуществления, штифт 40 соединен с первым элементом 24 и с переходником 32 стойки, обеспечивая за счет этого возможность поворотного вращения переходника 32 стойки вокруг штифта 40 по мере того, как исполнительный механизм 28 сошника выдвигается и втягивается. Соответственно, сошник 36 движется вниз или вверх согласно выдвижению или втягиванию исполнительного механизма, соответственно. Переходник 32 стойки содержит несколько отверстий для приема штифта, соединяющего конец исполнительного механизма 28 сошника с переходником. Отверстия переходника могут использоваться для регулирования угла исполнительного механизма 28 относительно узла параллелограммного навесного устройства, изменяя за счет этого угол и величину усилий исполнительного механизма.
[0018] По мере того как исполнительный механизм 28 сошника втягивается, стопорная пластина 42 может давить на заднюю раму 44, создавая подъемное усилие, которое передается на рычаг 46 прикатывающего колеса. Получаемое в результате подъемное усилие, вызываемое исполнительным механизмом 28, уменьшает прикатывающее усилие прикатывающего колеса 48 и может в итоге поднимать прикатывающее колесо 48 с поверхности земли. В проиллюстрированном варианте осуществления, узел 50 прикатывающего колеса облегчает регулирование высоты прикатывающего колеса 48 посредством узла крепежного средства/прорези. Положение прикатывающего колеса 48 управляет глубиной углубления, открываемого в почве сошником 36.
[0019] Для облегчения размещения семян во время работы сошник 36 соединен с устройством распределения семян посредством семяпровода 52. В проиллюстрированном варианте осуществления, так как высота местности колеблется, высевающая секция движется вверх или вниз от проиллюстрированного нейтрального положения. Исполнительный механизм 28 сошника может выдвигаться, развертывая за счет этого сошник 36 вниз в землю, нажимая переходник 32 стойки на стопоры 54 задней рамы. Поверхность 56 почвы может формироваться и направляться сошником 36, узлом 22 заделывающего диска и прикатывающим колесом 48. Соответственно, может устанавливаться требуемый почвенный профиль.
[0020] По мере того как высевающая секция 18 движется в направлении движения 58, сошник 36 выкапывает бороздку в поверхности 56 почвы. Семяпровод 52 затем вносит семена в бороздку, а заделывающий диск 30 покрывает семена почвой, смещенной сошником 36. Прикатывающее колесо 48 затем уплотняет почву над семенами для установки по существу гладкой обработки почвы позади высевающей секции. Следует понимать, что гладкость обработки почвы позади высевающей секции по меньшей мере частично зависит от почвенных условий (например, содержания влаги, состава почвы и т.д.) и скорости орудия. Например, при эксплуатации орудия в поле, имеющем более высокую плотность почвы, орудие может буксироваться с более медленной скоростью так, чтобы заделывающий диск 30 и прикатывающее колесо 48 могли обеспечивать гладкую обработку почвы. И наоборот, при эксплуатации орудия в поле, имеющем более низкую плотность почвы, орудие может буксироваться с более высокой скоростью, обеспечивая в то же время требуемую обработку почвы. Следует понимать, что эксплуатация орудия с более высокой скоростью повышает эффективность посева за счет уменьшения продолжительности посевных работ. Соответственно, оператор может подавать команду буксирования орудия рабочим транспортным средством с самой высокой скоростью, подходящей для установки требуемой обработки почвы.
[0021] К сожалению, если орудие буксируют по полю с постоянной скоростью, колебания почвенных условий могут создавать области, имеющие нежелательную обработку почвы (например, излишне глубокие бороздки, излишне высокие отвалы почвы на противоположных сторонах бороздки и т.д.). В результате, семена могут размещаться на нежелательной глубине, препятствуя за счет этого развитию сельскохозяйственной культуры. Соответственно, орудие может буксироваться со скоростью более низкой, чем требуется, увеличивая за счет этого продолжительность посевных работ и понижая эффективность посева. В проиллюстрированном варианте осуществления, орудие 10 содержит систему 60 управления обработкой почвы, выполненную с возможностью определения гладкости обработки почвы позади высевающей секции и с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона. В результате, орудие может устанавливать требуемую обработку почвы по всему полю, улучшая за счет этого развитие сельскохозяйственной культуры. В дополнение, за счет управления скоростью рабочего транспортного средства, система 60 управления обработкой почвы может предоставлять возможность буксирования орудия с самой высокой скоростью, подходящей для локальных почвенных условий.
[0022] Как обсуждается подробно ниже, система 60 управления обработкой почвы содержит датчик, выполненный с возможностью выдачи сигнала, указывающего на почву, смещенную высевающей секцией, и контроллер орудия, соединенный с возможностью сообщения с датчиком. Контроллер орудия выполнен с возможностью определения гладкости обработки почвы позади высевающей секции в направлении движения на основании сигнала. Контроллер также выполнен с возможностью регулирования параметра, влияющего на обработку почвы (например, скорость орудия, угол сошника и т.д.), когда гладкость находится за пределами требуемого диапазона. Соответственно, система 60 управления обработкой почвы может автоматически компенсировать колебания почвенных условий, обеспечивая за счет этого возможность буксирования орудия с более высокой средней скоростью по полю.
[0023] В проиллюстрированном варианте осуществления, система 60 управления обработкой почвы содержит бесконтактный датчик 62, направленный к области почвы позади высевающей секции 18 в направлении движения 58. Как обсуждается подробно ниже, бесконтактный датчик 62 выполнен с возможностью осуществления мониторинга высоты и/или ширины почвы, смещенной высевающей секцией 18, обеспечивая за счет этого возможность определения контроллером орудия гладкости обработки почвы позади высевающей секции. В некоторых вариантах осуществления, бесконтактный датчик 62 может содержать оптическую камеру, выполненную с возможностью предоставления контроллеру орудия изображений, являющихся указанием на почву, смещенную высевающей секцией. Кроме того, дополнительные варианты осуществления могут включать в себя еще один бесконтактный датчик, такой как, например, активный инфракрасный преобразователь, пассивная инфракрасная камера, ультразвуковой преобразователь или радиочастотный преобразователь.
[0024] В проиллюстрированном варианте осуществления, система 60 управления обработкой почвы также содержит датчик 64 нагрузки, выполненный с возможностью измерения контактного усилия между заделывающим диском 30 и почвой 56. В некоторых вариантах осуществления, датчик 64 нагрузки может содержать тензиометрический датчик, соединенный с кронштейном 38 и выполненный с возможностью измерения контактного усилия на основании деформации кронштейна. В дополнительных вариантах осуществления, датчик нагрузки может содержать пъезоэлектрический преобразователь, датчик механической деформации, микроэлектромеханический (MEMS) датчик или любое другое подходящее устройство для измерения усилия, прикладываемого к заделывающему диску 30. Следует понимать, что более высокая нагрузка на заделывающий диск 30 может являться указанием на повышенное смещение почвы, а более низкая нагрузка на заделывающий диск 30 может являться указанием на пониженное смещение почвы. Соответственно, датчик 64 нагрузки выполнен с возможностью выдачи сигнала (например, в виде измерения контактного усилия), являющегося указанием на почву, смещенную высевающей секцией.
[0025] Проиллюстрированная система 60 управления обработкой почвы также включает в себя датчик 66 нагрузки, выполненный с возможностью измерения контактного усилия между сошником 36 и почвой 56. В некоторых вариантах осуществления, датчик 66 нагрузки может содержать тензиометрический датчик, соединенный со стойкой 34 и выполненный с возможностью измерения контактного усилия на основании деформации стойки. В дополнительных вариантах осуществления, датчик нагрузки может включать в себя пъезоэлектрический преобразователь, датчик механической деформации, микроэлектромеханический (MEMS) датчик или любое другое подходящее устройство для измерения усилия, прикладываемого к сошнику 36. Следует понимать, что более высокая нагрузка на сошник 36 может являться указанием на повышенное смещение почвы, а более низкая нагрузка на сошник 36 может являться указанием на пониженное смещение почвы. Соответственно, датчик 66 нагрузки выполнен с возможностью выдачи сигнала (например, в виде измерения контактного усилия), являющегося указанием на почву, смещенную высевающей секцией.
[0026] Как обсуждается подробно ниже, система 60 управления обработкой почвы содержит контроллер, соединенный с возможностью сообщения с датчиками (например, бесконтактным датчиком 62, датчиком 64 нагрузки на заделывающий диск и/или датчиком 66 нагрузки на сошник). Контроллер выполнен с возможностью определения гладкости обработки почвы позади высевающей секции в направлении движения на основании сигнала от датчиков, являющегося указанием на почву, смещенную высевающей секцией. Контроллер также выполнен с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона. Например, если обработка почвы менее гладкая, чем требуется, контроллер может подавать команду уменьшения скорости рабочего транспортного средства, с которой орудие буксируют по полю. Более медленная скорость может обеспечивать более гладкую обработку почвы, улучшая за счет этого точность размещения семян. И наоборот, если обработка почвы более гладкая, чем требуется, контроллер может подавать команду рабочему транспортному средству увеличить скорость орудия, понижая за счет этого отрезок времени, связанный с посевными работами.
[0027] В дополнение, контроллер может быть выполнен с возможностью регулирования угла сошника 36 относительно поверхности 56 почвы для изменения гладкости обработки почвы. Например, если обработка почвы менее гладкая, чем требуется, контроллер может подавать команду уменьшения исполнительным механизмом 28 сошника угла между сошником 36 и поверхностью 56 почвы. Более пологий угол может уменьшать почву, смещенную сошником, обеспечивая за счет этого более гладкую обработку почвы и улучшая точность размещения семян. И наоборот, если обработка почвы более гладкая, чем требуется, контроллер может подавать команду увеличения исполнительным механизмом 28 сошника угла между сошником 36 и поверхностью 56 почвы, увеличивая за счет этого смещение почвы и обеспечивая более неровную обработку почвы.
[0028] Несмотря на то что проиллюстрированный вариант осуществления включает три датчика (например, бесконтактный датчик 62, датчик 64 нагрузки на заделывающий диск и датчик 66 нагрузки на сошник), необходимо принимать во внимание, что альтернативные варианты осуществления могут включать один или два датчика, выполненные с возможностью осуществления мониторинга почвы, смещенной высевающей секцией. В дополнение, необходимо принимать во внимание, что некоторые высевающие блоки могут содержать дополнительные взаимодействующие с землей инструменты (например, второй сошник и т.д.). В подобных конфигурациях, высевающая секция может содержать датчик нагрузки, выполненный с возможностью измерения контактного усилия между дополнительным взаимодействующим с землей инструментом и почвой. Кроме того, несмотря на то, что проиллюстрированный вариант осуществления включает в себя узел 22 заделывающего диска, содержащий заделывающий диск 30, необходимо принимать во внимание, что в альтернативных вариантах осуществления высевающей секции 18 узел 22 заделывающего диска может быть исключен. В подобных вариантах осуществления, прикатывающее колесо 48 может быть отделено от сошника 36 расстоянием, которое обеспечивает возможность падения по меньшей мере части почвы, смещенной сошником 36, в семенную бороздку перед уплотнением почвы прикатывающим колесом 48. Следует понимать, что в подобных вариантах осуществления датчик 64 нагрузки на заделывающий диск может быть исключен.
[0029] Также следует принимать во внимание, что высевающая секция может содержать любое подходящее число взаимодействующих с землей инструментов и/или взаимодействующие с землей инструменты любой подходящей конфигурации. Например, в некоторых вариантах осуществления, высевающая секция может содержать единственный взаимодействующий с землей инструмент (например, сошник, нож, дисковый нож, прикатывающее колесо, заделывающий диск и т.д.). В подобных вариантах осуществления, система управления обработкой почвы может отслеживать почву, смещенную единственным взаимодействующим с землей инструментом (например, посредством бесконтактного датчика или датчика нагрузки, установленного на инструменте). Система управления обработкой почвы может затем определять гладкость обработки почвы позади взаимодействующего с землей инструмента на основании смещенной почвы. Параметр, влияющий на обработку почвы, затем можно регулировать для создания требуемой гладкости. Например, система управления обработкой почвы может подавать команду регулирования рабочим транспортным средством скорости буксирования орудия на основании гладкости обработки почвы. В дополнение, система управления обработкой почвы может регулировать угол единственного входящего взаимодействующего с землей инструмента относительно поверхности почвы для достижения требуемой гладкости.
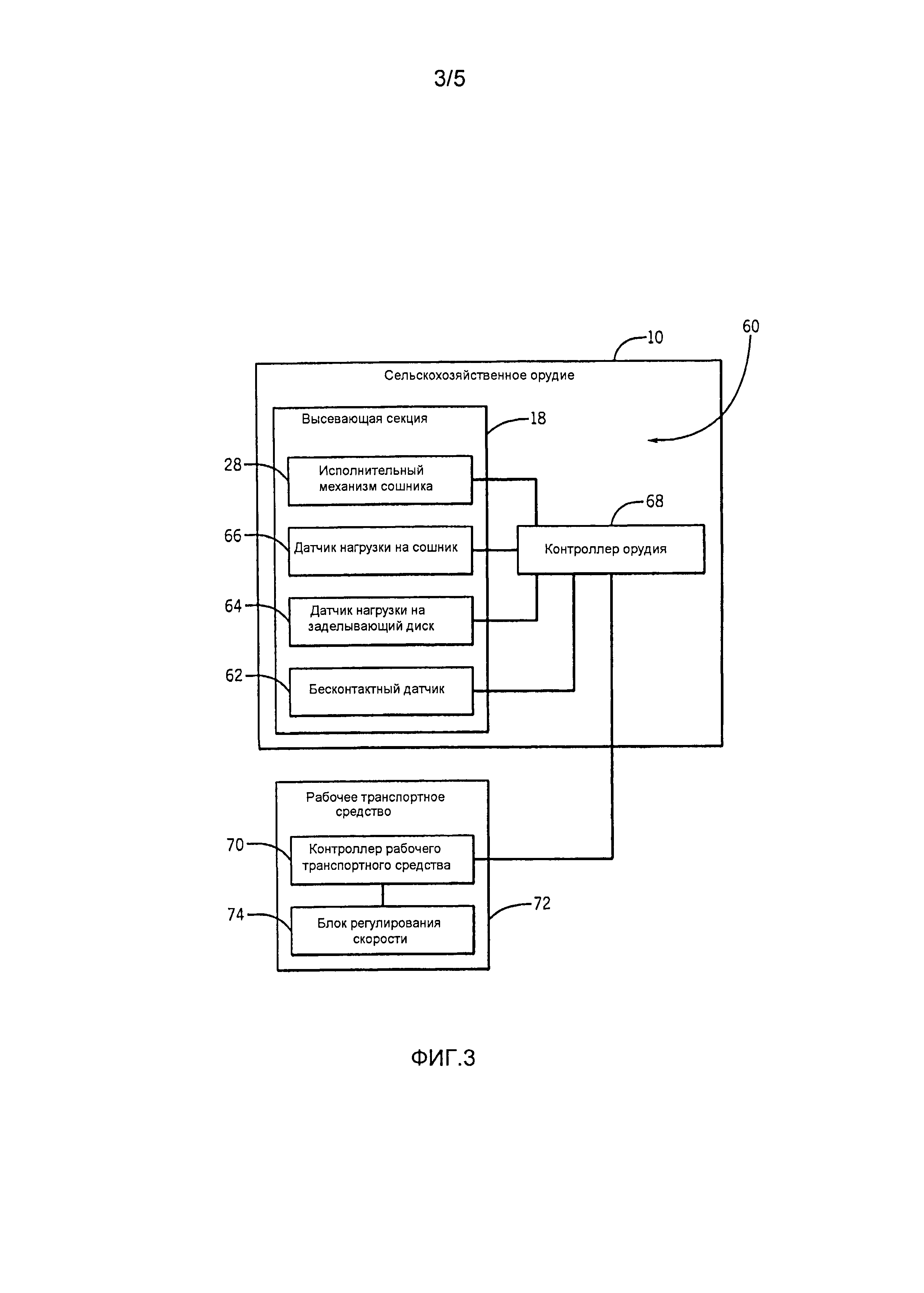
[0030] Фиг. 3 представляет собой схематичное представление варианта осуществления системы 60 управления обработкой почвы, которая может быть использована в сельскохозяйственном орудии 10 фиг. 1. В проиллюстрированном варианте осуществления, сельскохозяйственное орудие 10 содержит высевающую секцию 18, содержащую исполнительный механизм 28 сошника, датчик 66 нагрузки на сошник, датчик 64 нагрузки на заделывающий диск и бесконтактный датчик 62. Как обсуждалось ранее, датчик 66 нагрузки на сошник, датчик 64 нагрузки на заделывающий диск, и/или бесконтактный датчик 62 выполнены с возможностью выдачи сигнала, указывающего на почву, смещенную высевающей секцией. В проиллюстрированном варианте осуществления, орудие 10 включает в себя контроллер 68 орудия, соединенный с возможностью сообщения с датчиком 66 нагрузки на сошник, датчиком 64 нагрузки на заделывающий диск и бесконтактным датчиком 62. Контроллер 68 выполнен с возможностью определения гладкости обработки почвы позади высевающей секции в направлении движения на основании сигнала датчика. Контроллер 68 также выполнен с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона.
[0031] Как проиллюстрировано, контроллер 68 соединен с возможностью сообщения с исполнительным механизмом 28 сошника. Соответственно, контроллер 68 может подавать команду регулирования исполнительным механизмом 28 сошника угла сошника для достижения требуемой обработки почвы. Например, если обработка почвы менее гладкая, чем требуется, контроллер 68 может подавать команду уменьшения исполнительным механизмом 28 сошника угла сошника относительно поверхности почвы. И наоборот, если обработка почвы более гладкая, чем требуется, контроллер 68 может подавать команду увеличения исполнительным механизмом 28 сошника угла сошника относительно поверхности почвы. Следовательно, система 60 управления обработкой почвы может устанавливать требуемую обработку почвы по полю.
[0032] В дополнение, контроллер 68 орудия соединен с возможностью сообщения с контроллером 70 рабочего транспортного средства внутри рабочего транспортного средства 72. Как обсуждалось ранее, рабочее транспортное средство 72 выполнено с возможностью буксирования сельскохозяйственного орудия 10 по полю. В проиллюстрированном варианте осуществления, контроллер 68 орудия выполнен с возможностью определения требуемой скорости сельскохозяйственного орудия на основании определения/измерения гладкости обработки почвы. Контроллер 68 также выполнен с возможностью выдачи сигнала, указывающего на требуемую скорость, контроллеру 70 рабочего транспортного средства. Контроллер 70 рабочего транспортного средства, в свою очередь, выполнен с возможностью выдачи команды регулирования скорости рабочего транспортного средства блоком 74 регулирования скорости, буксируя за счет этого сельскохозяйственное орудие с требуемой скоростью.
[0033] В качестве примера, бесконтактный датчик 62 может выдавать сигнал, являющийся указанием на гладкости обработки почвы в пределах области позади высевающей секции 18. Контроллер 68 орудия может затем определять требуемую скорость сельскохозяйственного орудия на основании сигнала и выдавать второй сигнал, являющийся указанием на требуемую скорость, контроллеру 70 рабочего транспортного средства. Например, если обработка почвы более гладкая, чем требуется, контроллер 68 орудия может подавать команду увеличения скорости рабочим транспортным средством. И наоборот, если обработка почвы менее гладкая, чем требуется, контроллер 68 орудия может подавать команду уменьшения скорости рабочим транспортным средством. В результате, скорость орудия можно регулировать для обеспечения требуемой обработки почвы, снижая в то же время отрезок времени, связанный с посевными работами.
[0034] В некоторых вариантах осуществления, каждая высевающая секция содержит один или более датчиков, выполненных с возможностью осуществления мониторинга почвы, смещенной высевающей секцией. В подобных вариантах осуществления, контроллер 68 орудия может быть выполнен с возможностью усреднения подвергнутого мониторингу смещения почвы по всем высевающим секциям для определения гладкости обработки почвы. В качестве альтернативы, контроллер 68 может быть выполнен с возможностью определения гладкости обработки почвы на основании наибольшего подвергнутого мониторингу смещения почвы. В дополнительных вариантах осуществления, контроллер 68 может быть выполнен с возможностью усреднения подвергнутого мониторингу смещения почвы в различных областях орудия и определения гладкости обработки почвы на основании области, имеющей наибольшее среднее смещение почвы. В дополнение, необходимо принимать во внимание, что контроллер 68 может задействовать различные методики статистического анализа для определения гладкости обработки почвы на основании отслеживаемого смещения почвы.
[0035] Кроме того, единственный датчик (например, бесконтактный датчик) может осуществлять мониторинг почвы, смещенной каждой высевающей секцией орудия. В подобном варианте осуществления, гладкость обработки почвы может быть определена на основании смещения почвы, подвергнутого мониторингу датчиком. Например, к области позади высевающих секций может быть направлена оптическая камера. Оптическая камера может быть выполнена с возможностью выдачи сигнала, указывающего на почву, смещенную каждой высевающей секцией, обеспечивая за счет этого возможность определения контроллером орудия гладкости обработки почвы на основании смещения почвы (например, за счет усреднения почвы, смещенной каждой высевающей секцией). В дополнительных вариантах осуществления, для осуществления мониторинга смещения почвы может быть использовано множество датчиков (например, один датчик на инструментальную раму).
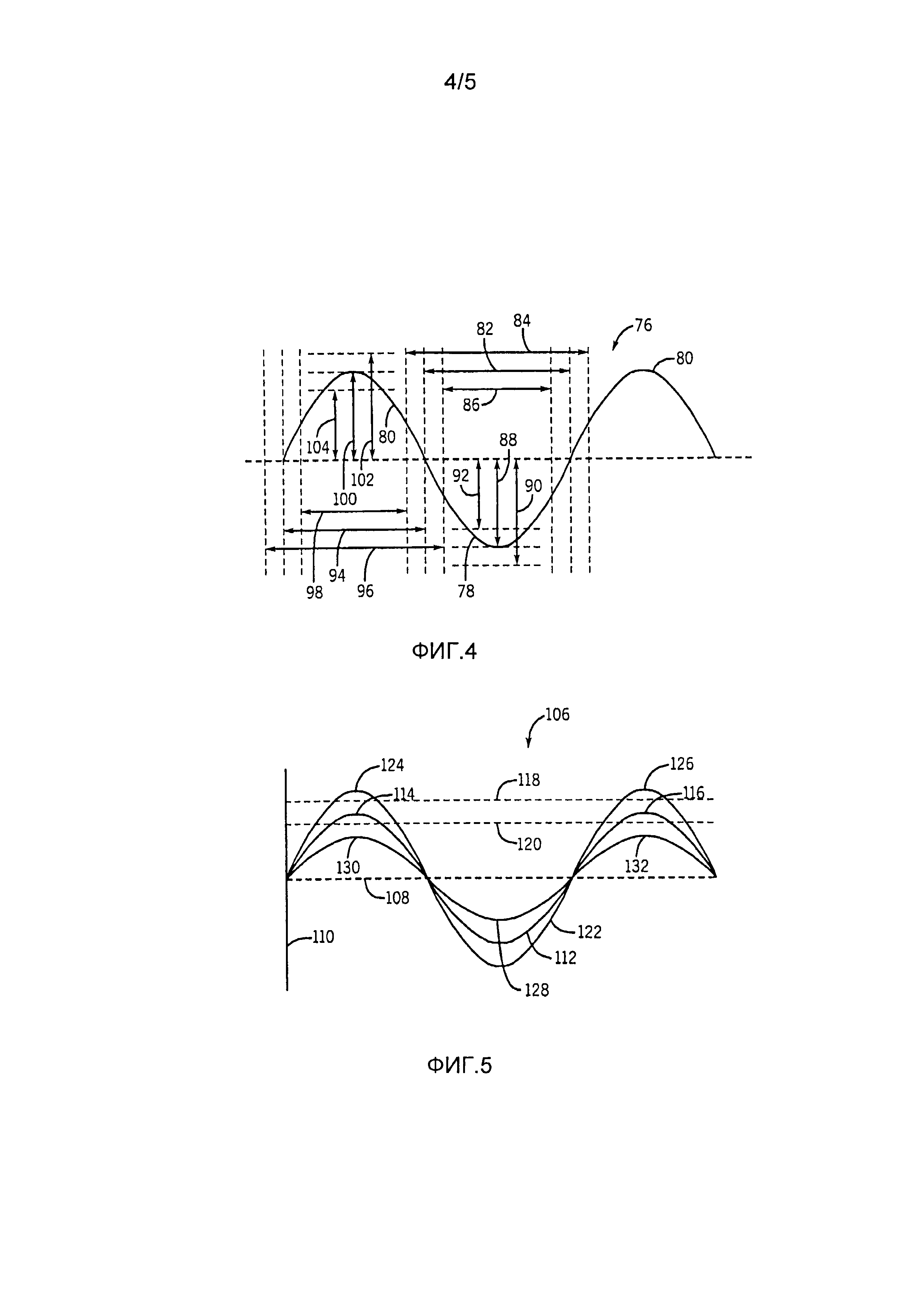
[0036] Фиг. 4 представляет собой изображение иллюстративного профиля обработки 74 почвы, создаваемого высевающей секцией 18 фиг. 2. Как проиллюстрировано, обработка почвы включает бороздку 78 и отвалы 80, расположенные на противоположных боковых сторонах бороздки. Гладкость обработки почвы может оцениваться на основании ширины бороздки 78, глубины бороздки 78, ширины отвала 80 и/или высоты отвала 80. Например, контроллер орудия может определить, что почвенный профиль менее гладкий, чем требуется, если ширина 82 бороздки 78 больше, чем максимальная пороговая ширина 84. И наоборот, контроллер орудия может определить, что почвенный профиль более гладкий, чем требуется, если ширина 82 бороздки 78 меньше, чем минимальная пороговая ширина 86. В качестве примера, в то время как ширина 82 бороздки больше, чем максимальная пороговая ширина 84, контроллер орудия может подавать команду уменьшения скорости рабочего транспортного средства для обеспечения более гладкой обработки почвы. И наоборот, в то время как ширина 82 бороздки меньше, чем минимальная пороговая ширина 86, контроллер орудия может подавать команду увеличения скорости рабочего транспортного средства для уменьшения периода времени, связанного с посевной работой.
[0037] Кроме того, контроллер орудия может определять, что почвенный профиль менее гладкий, чем требуется, если глубина 88 бороздки 78 больше, чем максимальная пороговая глубина 90. И наоборот, контроллер орудия может определять, что почвенный профиль более гладкий, чем требуется, если глубина 88 бороздки 78 меньше, чем минимальная пороговая глубина 92. В качестве примера, в то время как глубина 88 бороздки больше, чем максимальная пороговая глубина 90, контроллер орудия может подавать команду уменьшения скорости рабочего транспортного средства для обеспечения более гладкой обработки почвы. И наоборот, в то время как глубина 88 бороздки меньше, чем минимальная пороговая глубина 92, контроллер орудия может подавать команду увеличения скорости рабочего транспортного средства для уменьшения периода времени, связанного с посевной работой.
[0038] В дополнение, контроллер орудия может определять, что почвенный профиль менее гладкий, чем требуется, если ширина 94 отвала 80 больше, чем максимальная пороговая ширина 96. И наоборот, контроллер орудия может определять, что почвенный профиль более гладкий, чем требуется, если ширина 94 отвала 80 меньше, чем минимальная пороговая ширина 98. В качестве примера, в то время как ширина 94 отвала больше, чем максимальная пороговая ширина 96, контроллер орудия может подавать команду уменьшения скорости рабочего транспортного средства для обеспечения более гладкой обработки почвы. И наоборот, в то время как ширина 94 отвала меньше, чем минимальная пороговая ширина 98, контроллер орудия может подавать команду увеличения скорости рабочего транспортного средства для уменьшения периода времени, связанного с посевной работой.
[0039] Контроллер орудия может также определять, что почвенный профиль менее гладкий, чем требуется, если высота 100 отвала 80 больше, чем максимальная пороговая высота 102. И наоборот, контроллер орудия может определить, что почвенный профиль более гладкий, чем требуется, если высота 100 отвала 80 меньше, чем минимальная пороговая высота 104. В качестве примера, в то время как высота 100 отвала больше, чем максимальная пороговая высота 102, контроллер орудия может подавать команду уменьшения скорости рабочего транспортного средства для обеспечения более гладкой обработки почвы. И наоборот, в то время как высота 100 отвала меньше, чем минимальная пороговая высота 104, контроллер орудия может подавать команду увеличения скорости рабочего транспортного средства для уменьшения периода времени, связанного с посевной работой.
[0040] Фиг. 5 представляет собой примерный график 106 усилия, прикладываемого к элементу высевающей секции фиг. 2. На проиллюстрированном графике 106, ось 108 x соответствует времени, а ось 110 y соответствует усилию. В дополнение, кривая 112 отображает контактное усилие на элементе (например, сошнике, заделывающем диске и т.д.) высевающей секции в качестве функции времени. Как проиллюстрировано, контактное усилие изменяется со временем вследствие колебаний в составе/плотности почвы. В проиллюстрированном варианте осуществления, кривая 112 содержит первый пик 114 и второй пик 116, каждый из которых является указанием на максимальное усилие, прикладываемое к элементу высевающей секции.
[0041] График 106 также содержит максимальное пороговое усилие 118 и минимальное пороговое усилие 120. Максимальное пороговое усилие 118 соответствует верхней границе диапазона гладкости требуемой обработки почвы. То есть эксплуатация высевающей секции таким образом, чтобы элемент испытывал усилие большее, чем максимальное пороговое усилие 118, может приводить к нежелательно неровной обработке почвы. И наоборот, минимальное пороговое усилие 120 соответствует нижней границе диапазона гладкости требуемой обработки почвы. То есть эксплуатация высевающей секции таким образом, чтобы элемент испытывал усилие меньшее, чем минимальное пороговое усилие 120, может приводить к нежелательно гладкой обработке почвы. Вследствие того, что пики 114 и 116 кривой 112 находятся между минимальным и максимальным пороговыми усилиями, профиль усилия, соответствующий кривой 112, устанавливает обработку почвы, имеющую требуемую гладкость.
[0042] График 106 также содержит вторую кривую 122 усилия, имеющую первый пик 124 и второй пик 126. Как проиллюстрировано, контактное усилие, соответствующее пикам 124 и 126, больше, чем максимальное пороговое усилие 118. Соответственно, если выявлен подобный профиль контактного усилия, контроллер орудия может подавать команду уменьшения скорости рабочего транспортного средства буксирования орудия и/или уменьшения угла сошника для установки требуемой обработки почвы. Как только установлена требуемая обработка почвы, контактное усилие может уменьшаться ниже максимального порогового усилия 118.
[0043] Кроме того, график 106 содержит третью кривую 128 усилия, имеющую первый пик 130 и второй пик 132. Как проиллюстрировано, контактное усилие, соответствующее пикам 130 и 132, меньше, чем минимальное пороговое усилие 120. Соответственно, если выявлен профиль подобного контактного усилия, контроллер орудия может подавать команду увеличения скорости буксирования орудия рабочим транспортным средством и/или увеличения угла сошника для установки требуемой обработки почвы. Как только установлена требуемая обработка почвы, контактное усилие может быть увеличено выше минимального порогового усилия 120. За счет автоматического управления обработкой поверхности, система управления может устанавливать требуемую гладкость по полю, улучшая за счет этого точность размещения семян и улучшая развитие сельскохозяйственной культуры.
[0044] Фиг. 6 представляет собой блок-схему последовательности операций для варианта осуществления способа 134 управления обработкой почвы сельскохозяйственным орудием. Во-первых, как представлено, на этапе 136 принимают сигнал, являющийся указанием на почву, смещенную высевающей секцией по мере того, как высевающая секция движется в направлении движения. Как обсуждалось ранее, сигнал может быть получен от бесконтактного датчика, направленного к области почвы позади высевающей секции в направлении движения. Сигнал также может быть получен от датчика, выполненного с возможностью измерения контактного усилия между элементом высевающей секции (например, сошником, заделывающим диском и т.д.) и почвой.
[0045] Далее, как представлено, на этапе 138 на основании сигнала определяют гладкость обработки почвы позади высевающей секции в направлении движения. Как обсуждалось ранее, гладкость может быть определена на основании ширины семенной бороздки, глубины семенной бороздки, ширины отвала почвы, расположенного рядом с семенной бороздкой, и/или высоты отвала почвы, расположенного рядом с семенной бороздкой. Затем регулируют параметр, влияющий на обработку почвы, когда гладкость находится за пределами требуемого диапазона, как представлено, на этапе 140. Например, этап регулирования параметра, влияющего на обработку почвы, может включать в себя этапы, на которых определяют требуемую скорость сельскохозяйственного орудия на основании гладкости обработки почвы и отправляют сигнал, являющийся указанием на требуемую скорость, контроллеру рабочего транспортного средства. Следовательно, орудие может буксироваться по полю со скоростью, которая производит требуемую обработку почвы. Этап регулирования параметра, влияющего на обработку почвы, также может включать в себя этап, на котором регулируют угол сошника относительно поверхности почвы, определяя за счет этого требуемую обработку почвы. Установка требуемой обработки почвы может облегчать точное размещение семян, улучшая за счет этого развитие сельскохозяйственной культуры.
[0046] Несмотря на то что в данном описании были проиллюстрированы и описаны только некоторые признаки изобретения, специалистам в данной области очевидно множество изменений и дополнений. Вследствие этого, следует понимать, что приложенная формула изобретения охватывает все такие изменения и дополнения, которые попадают в рамки сущности изобретения.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения, в частности к системе почвообрабатывающе-посевного орудия и способу ее управления. Орудие содержит высевающую секцию, датчик, выполненный с возможностью выдачи сигнала, указывающего на почву, смещенную высевающей секцией, и контроллер орудия, соединенный с возможностью сообщения с датчиком. Контроллер орудия выполнен с возможностью определения гладкости обработки почвы позади высевающей секции на основании сигнала и с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона. Такое конструктивное решение направлено на повышение эффективности посева. 3 н. и 14 з.п. ф-лы, 6 ил.
Формула
по меньшей мере одну высевающую секцию, выполненную с возможностью внесения сельскохозяйственного материала в почву в направлении движения;
датчик, выполненный с возможностью выдачи сигнала, указывающего на почву, смещенную высевающей секцией; и
контроллер орудия, соединенный с возможностью сообщения с датчиком, причем контроллер орудия выполнен с возможностью определения гладкости обработки почвы позади высевающей секции в направлении движения на основании сигнала, при этом контроллер орудия выполнен с возможностью регулирования параметра, влияющего на обработку почвы, когда гладкость находится за пределами требуемого диапазона, причем параметр, влияющий на обработку почвы, представляет собой скорость системы сельскохозяйственного орудия, при этом контроллер орудия выполнен с возможностью выдачи второго сигнала, указывающего на требуемую скорость, контроллеру рабочего транспортного средства.
принимают сигнал, указывающий на почву, смещенную высевающей секцией системы сельскохозяйственного орудия посредством приема сигнала от датчика, выполненного с возможностью измерения контактного усилия между элементом высевающей секции и почвой, при движении высевающей секции в направлении движения;
определяют гладкость обработки почвы позади высевающей секции в направлении движения на основании сигнала; и
регулируют параметр, влияющий на обработку почвы, когда гладкость находится за пределами требуемого диапазона.
определяют требуемую скорость системы сельскохозяйственного орудия на основании гладкости обработки почвы; и
отправляют второй сигнал, указывающий на требуемую скорость, контроллеру рабочего транспортного средства.
высевающую секцию, выполненную с возможностью внесения сельскохозяйственного материала в почву в направлении движения;
бесконтактный датчик, направленный к области почвы позади высевающей секции в направлении движения, при этом бесконтактный датчик выполнен с возможностью выдачи первого сигнала, указывающего на гладкость обработки почвы в области;
контроллер орудия, соединенный с возможностью сообщения с бесконтактным датчиком, при этом контроллер орудия выполнен с возможностью определения требуемой скорости системы сельскохозяйственного орудия на основании первого сигнала и выдачи второго сигнала, указывающего на требуемую скорость, контроллеру рабочего транспортного средства; и
датчик нагрузки, выполненный с возможностью выдачи третьего сигнала, указывающего на контактное усилие между элементом высевающей секции и поверхностью почвы, при этом контроллер орудия выполнен с возможностью определения требуемой скорости системы сельскохозяйственного орудия на основании первого сигнала и третьего сигнала.
Комментарии