Комбинированный сканирующий туннельный микроскоп - растровый электронный микроскоп - RU2089968C1
Код документа: RU2089968C1
Чертежи
Описание
Изобретение относится к научному приборостроению и может быть использовано в приборах для топографии и анализа состава поверхности.
Известно устройство, представляющее собой сочетание сканирующего туннельного микроскопа и растрового электронного микроскопа СТМ-РЭМ [1] позволяющее совместить высокое разрешение СТМ в плоскости и по вертикали с широким полем обзора образца в РЭМ и, кроме того, наблюдать один и тот же участок обоими способами. Оно содержит установленную в вакуумную камеру РЭМ на столике для образца головку СТМ, которая содержит пьезоприводы иглы по координатам X, Y, Z в форме треноги с полем сканирования 1,2x1,2 мкм2 и неподвижный держатель образца. Выбор участка сканирования на площади 1x1 мм2 и подвод иглы осуществляется посредством трех прецезионных винтов приводов перемещения столика образца РЭМ, выведенных через вращательные выводы наружу вакуумной камеры. Его недостатками является небольшая площадь обзора и малое поле сканирования, а также недостаточная устойчивость к внешним механическим воздействиям.
Известно комбинированное устройство СТМ-РЭМ /1/, содержащее СТМ-головку с раздельными комбинированными приводами перемещения иглы /грубое и точное перемещение по X и Y/ и образца /грубое и точное перемещение по Z/, выполненными на основе дисковых биморфных пьезоэлементов.
Недостатками данного устройства являются конструктивная сложность СТМ-головки и ее большие габариты, низкая частота собственных колебаний головки, и как следствие низкая скорость сканирования образца, полное нарушение вакуума внутри камеры при смене образцов или игл, что требует длительного восстановления вакуума и увеличивает время проведения исследований.
Наиболее близким по технической сущности к заявляемому является комбинированное устройство СТМ-РЭМ /2/, содержащее СТМ-головку с приводами точного перемещения иглы и грубого перемещения столика с образцом, установленную под углом к электронному лучу на подвижной платформе РЭМ. Устройство содержит графический дисплей, позволяющий формировать на экране РЭМ маркер в виде отрезка линии для воспроизведения на экране расстояния от зонда иглы до поверхности образца и точки сближения зонда с образцом и маркер в виде прямоугольника для воспроизведения на экране поля сканирования зонда.
Недостатком этого устройства является то, что направление маркера-линии может не совпадать с отображаемым на экране положением зонда, что вызывает необходимость ручной корректировки положения зонда. Но корректировка по изображению иглы не гарантирует совпадения направлений маркера и действительного направления перемещения иглы вследствие ее изгиба или установки несоосно направлению перемещения.
Это приводит к смещению действительного поля сканирования,относительно указанного маркером, и необходимости затрачивать дополнительное время на его корректировку.
Предлагаемый комбинированный сканирующий туннельный микроскоп растровый электронный микроскоп, включающий вакуумную камеру растрового электронного микроскопа, головку сканирующего туннельного микроскопа, установленную в вакуумной камере и содержащую иглу, установленную в держателе, держатель образца, и пьезоприводы каждого из держателей, блок управления и видеоконтрольное устройство, дополнительно содержит генератор координатной сетки, соединенный с видеоконтрольным устройством и блоком управления, последний содержит узел автоматического совмещения осей сканирования СТМ и РЭМ и управляющий им микропроцессор, причем пьезопривод держателя иглы содержит полный параллелепипед, на торце которого установлен держатель иглы и который подпружинен с четырех сторон электростатическими зажимами, каждый из которых соединен с металлическим диском, зажатым между изолированными от него металлическими шайбами, закрепленными на верхнем торце трубчатого пьезопреобразователя, установленного на основании, а привод держателя образца содержит пьезопреобразователь, установленный с закрепленным на нем держателем образца внутри полого параллелепипеда на одном основании с трубчатым пьезопреобразователем.
При этом достигается следующий технический эффект:
уменьшение габаритов головки и увеличение резонансной частоты ее
собственных колебаний,
сокращение времени подвода острия к исследуемому участку образца и проведения исследований.
Уменьшение габаритов головки достигается путем размещения пьезоэлектрика привода точного перемещения образца внутри трубчатого пьезоэлектрика привода грубого перемещения иглы.
Уменьшенные габариты головки позволяют производить загрузку и выгрузку головки СТМ с исследуемым образцом в вакуумную камеру РЭМ через промежуточную шлюзовую камеру и тем самым сократить время для восстановления необходимой степени разряжения в вакуумной камере.
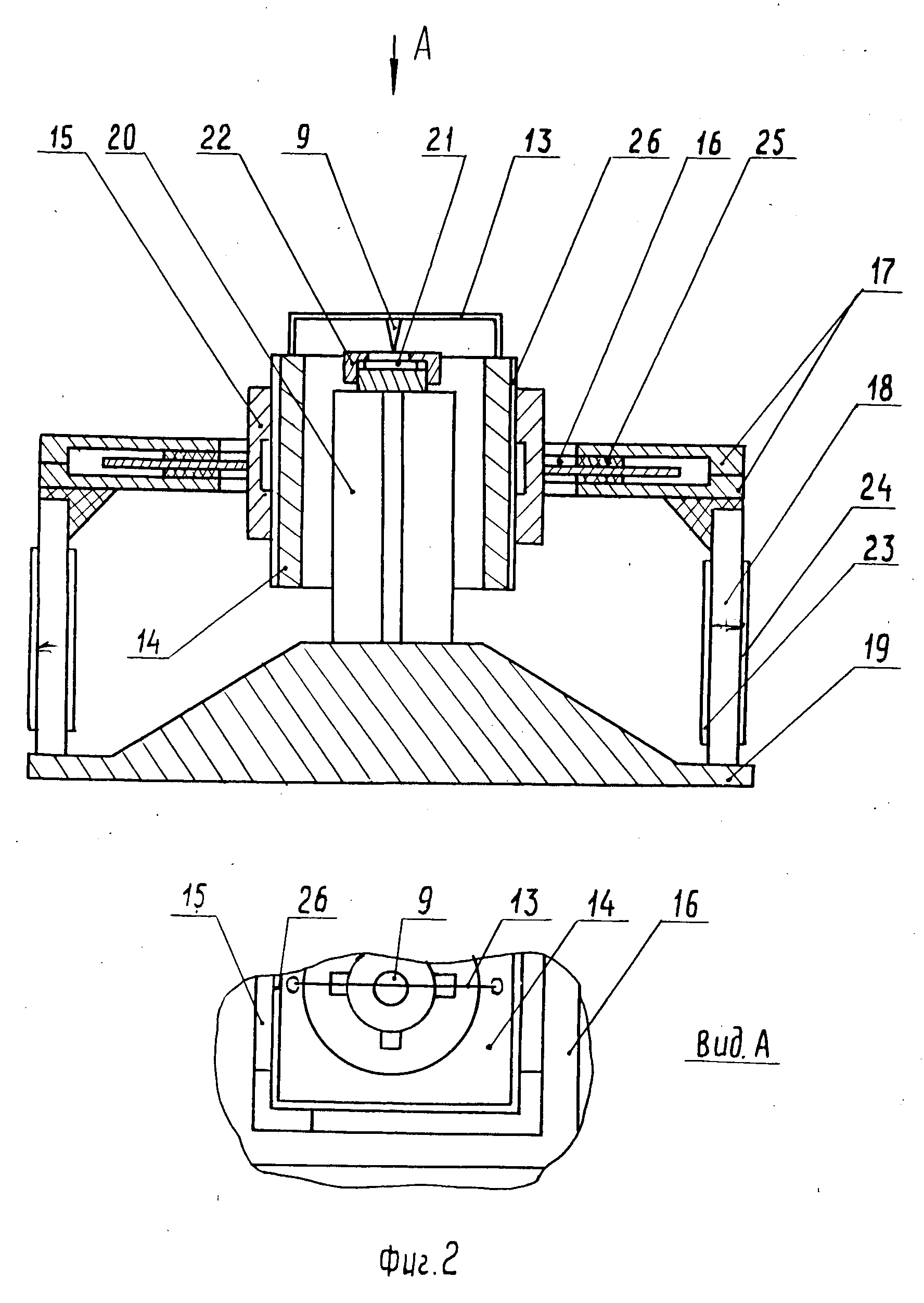
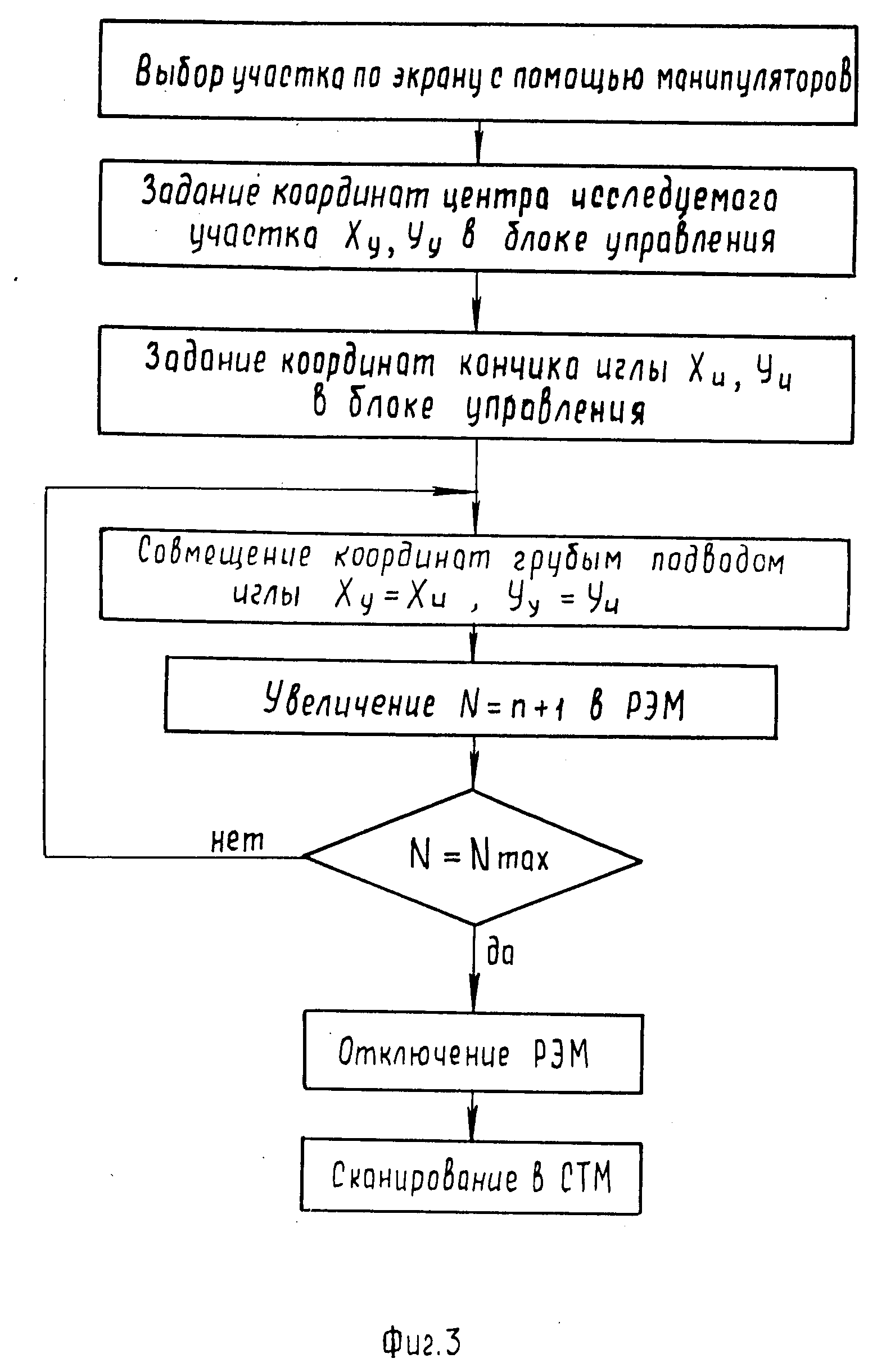
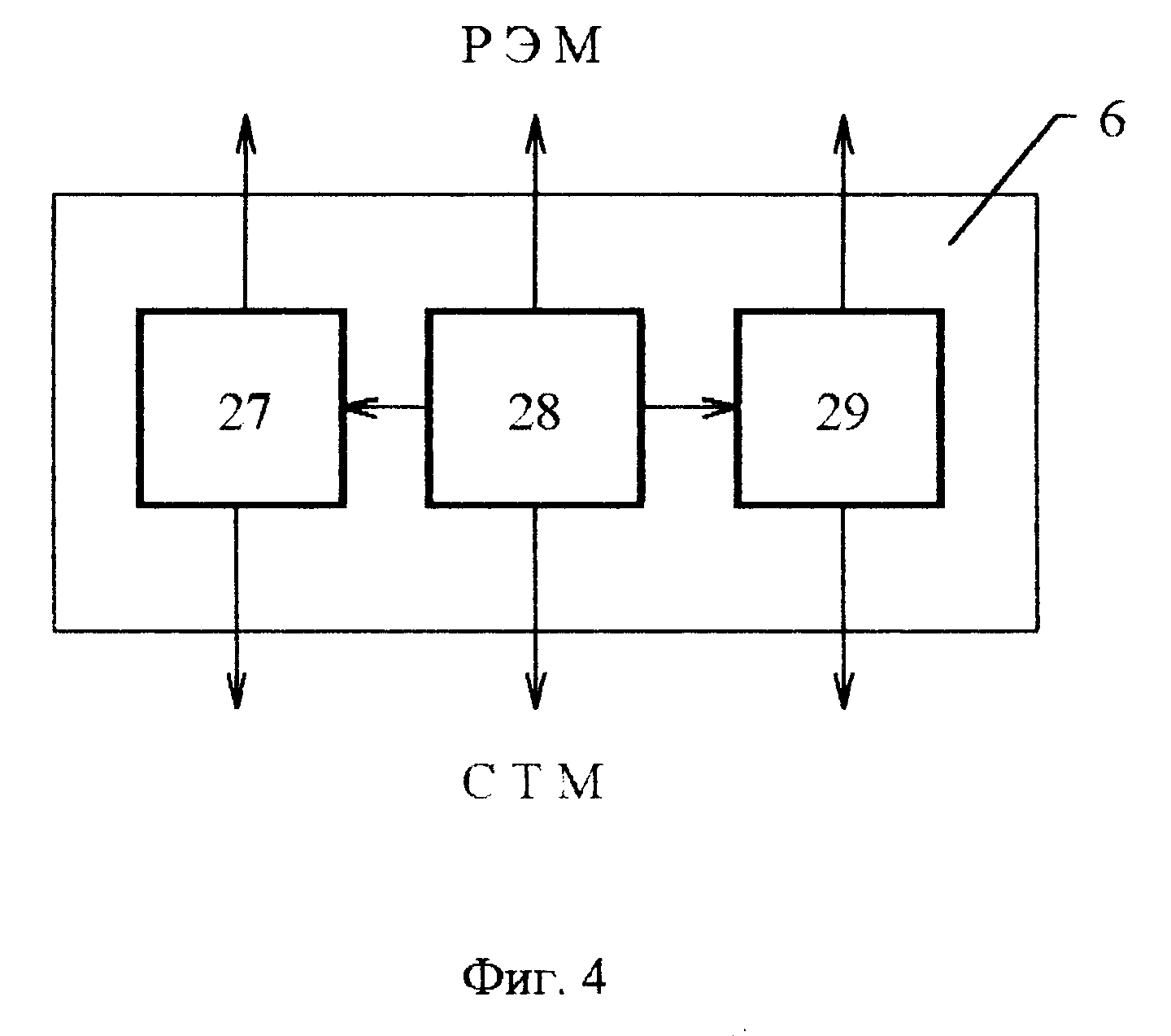
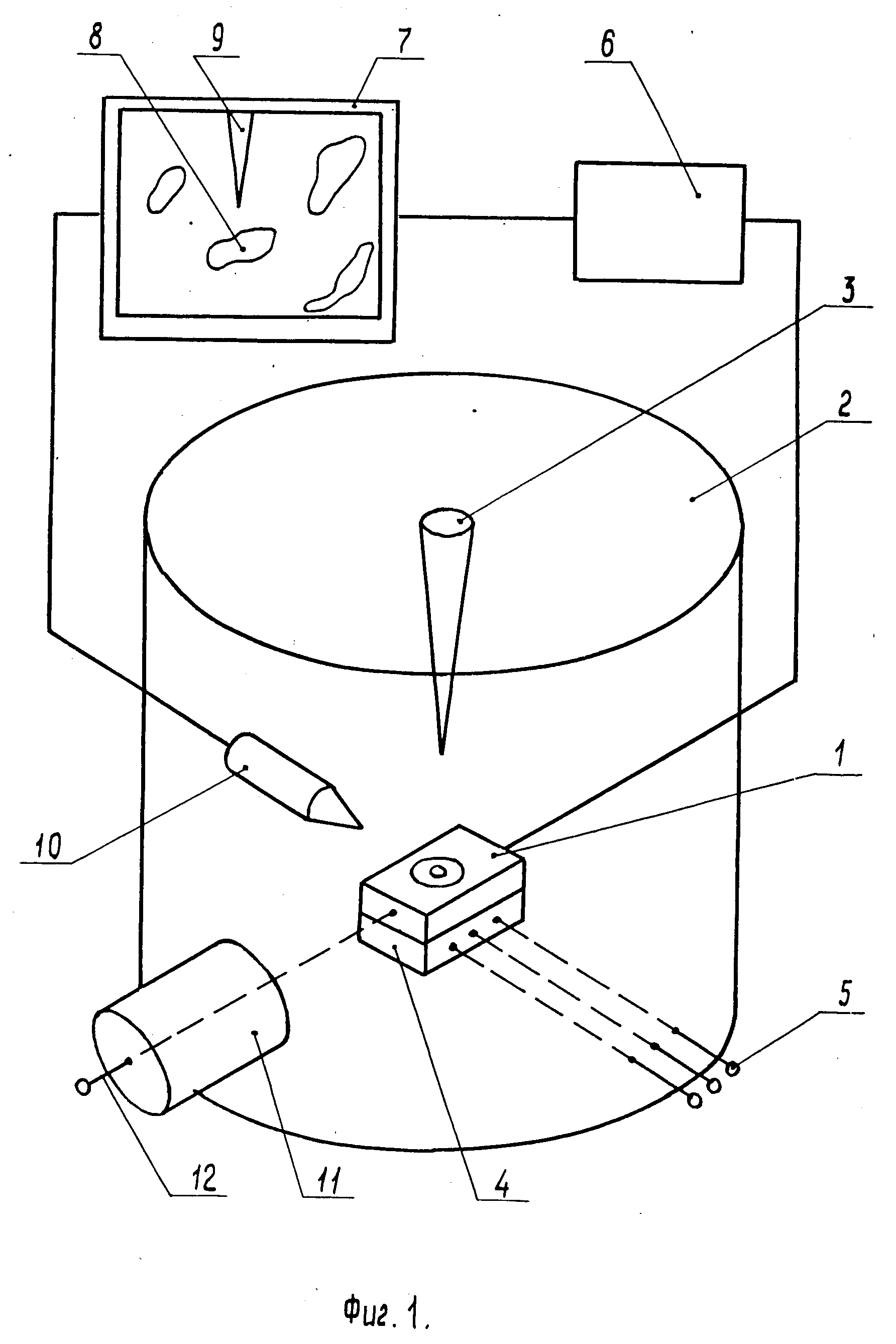
На фиг.1 изображена структурная схема устройства;на фиг.2 головка СТМ в разрезе; на фиг.3 алгоритм работы блока управления;на фиг.4 -структура блока управления.
Комбинированный СТМ-РЭМ содержит головку 1 СТМ, устанавливаемую в вакуумной камере 2 РЭМ под электронной пушкой 3 на платформе 4, имеющей возможность горизонтального перемещения вдоль осей X и Y с помощью блока манипулятора 5, блок управления 6 и видеоконтрольное устройство 7 РЭМ, формирующего изображение поверхности исследуемого участка 8 и иглы 9 на основе информации с детектора вторичных электронов 10, а также шлюзовую камеру 11 и шток 12 для загрузки головки 1.
На фиг. 2 изображена головка 1 СТМ в разрезе. Головка содержит иглу 9, закрепленную на П-образном держателе 13, установленном на торце полого параллелепипеда 14, перемещающегося в пружинных зажимах 15 и составляющих единое целое с имеющим возможность перемещаться в горизонтальной плоскости металлическим диском 16, который с небольшим усилием зажат между металлическими шайбами 17, установленными на торце трубчатого пьезопреобразователя 18, закрепленного на общем основании 19 СТМ-головки. Внутри полого параллелепипеда 14 на основании 19 закреплен пьезопреобразователь 20 точных перемещений, на верхнем торце которого установлены образец 21 и устройство 22 его крепления так, чтобы между образцом 21 и иглой 9 был возможен туннельный контакт. Игла 9 закреплена на держателе 13 под углом к поверхности образца 21, что дает возможность наблюдения кончика иглы с помощью РЭМ. На поверхность трубчатого пьезопреобразователя 18 нанесены металлические секции обкладок 23,24. Между металлическими шайбами 17 и диском 16 размещены изолирующие шайбы 25. На поверхность параллелепипеда 14 нанесен изолирующий слой 26.
На фиг. 4 изображен блок управления 6, который содержит генератор сетки 27, микропроцессор 28 и узел 29 автоматического совмещения осей сканирования СТМ и РЭМ.
Узел 29 совмещения осей сканирования СТМ-РЭМ содержит элементы для формирования корректирующих сигналов в систему строчной и кадровой разверток РЭМ для изменения направлений движения электронного луча.
Устройство работает следующим образом. После установки головки 1 СТМ в вакуумную камеру РЭМ изображение исследуемого участка 8 образца 21 при небольшом увеличении /позволяющем одновременно наблюдать исследуемый участок 8 и острие иглы 9/ с помощью манипуляторов 6 по осям X,Y платформы 4 РЭМ выводится в центр экрана ВКУ 7 РЭМ. Затем производится ступенчатое увеличение изображения образца 21 до тех пор, пока на экране ВКУ 7 одновременно присутствует и изображение острия иглы 9, при необходимости корректируя манипуляторами 5 изображение исследуемого участка 8 по центру экрана ВКУ 7. Генератор сетки 27 блока управления 6 формирует на экране ВКУ 7 РЭМ изображение координатном сетки. Направления осей координатной сетки на экране ВКУ фиксированы и согласованы с направлениями осей сканирования электронным лучом РЭМ.
Координаты острия иглы 9 в относительных координатах по сетке экрана вводятся оператором в микропроцессор 28 блока управления 6. Микропроцессор 28 в зависимости от положения острия иглы 9 на экране ВКУ 7 и установленного масштаба увеличения РЭМ вычисляет направление /вдоль оси X или оси Y/ и расстояние контрольного перемещения острия иглы 9 в поле экрана ВКУ 7 для определения взаимного углового расположения осей СТМ и РЭМ.
Команды с микропроцессора 28 поступают в СТМ, который производит контрольное перемещение острия 9 с помощью пьезопривода грубого перемещения одной из осей /X или Y/, после чего оператор вводит в блок управления 6 новые координаты острия 9 на экране ВКУ 7. Микропроцессор 28 блока управления 6 вычисляет угол рассовмещения осей привода грубого перемещения иглы СТМ и осей сканирования электронным лучом РЭМ и посредством узла 29 совмещения осей сканирования СТМ-РЭМ посылает в блок развертки электронного луча РЭМ сигналы для коррекции направления осей сканирования электронного луча.
По окончании юстировки осей сканирования РМ и осей приводов грубого перемещения СТМ оператор вводит в микропроцессор 28 блока управления 6 координаты исследуемого участка 8 образца 21 и острия 9 и подает команду на их совмещение. Предварительно, при необходимости посредством манипуляторов 5 X, Y РЭМ корректируется положение исследуемого участка 8 по центру экрана ВКУ 7 РЭМ. С учетом установленного масштаба увеличения РЭМ микропроцессор 28 блока управления 6, алгоритм работы которого изображен на фиг. 3, посылает сигналы в СТМ для перемещения острия 9 приводами грубого перемещения в область исследуемого участка 8. После этого ступенчато увеличивается масштаб увеличения РЭМ до требуемого так, чтобы на экране ВКУ одновременно присутствовали изображения нужного участка образца 8 и острия иглы 9, при необходимости оператором производится повторное совмещение положений исследуемого участка 8 и острия 9 описанным выше способом.
Далее производится сканирование исследуемого участка 8 образца 21 посредством СТМ сначала при максимальном поле обзора, а затем при необходимости исследования отдельных фрагментов исследуемого участка 21 производится уменьшение площади сканирования и выбор ее местоположения в пределах максимального поля обзора, обеспечиваемого точным приводом перемещения образца СТМ.
Головка СТМ работает следующим образом. В режиме грубого перемещения иглы 9 в горизонтальной плоскости относительно образца 21 на секции обкладок 23, 24 трубчатого пьезопреобразователя 18 подается пилообразное напряжение, в результате чего трубка 18 изгибается в соответствующую полярности напряжения сторону по оси X /или Y/. Перед этим на металлические шайбы 17 и диск 16 с разделяющими их диэлектрическими шайбами 25 подается фиксирующая разность потенциалов и происходит электростатический зажим диска 16. После сброса напряжения с обкладок 23, 24 и одновременного снятия фиксирующей разности потенциалов между диском 16 и металлическими шайбами 17 верхний торец трубки 18 возвращается в первоначальное положение и происходит инерционное проскальзывание диска 16 между диэлектрическими шайбами 25. При этом связанный с диском 16 параллелепипед 14 с иглой 9 остается смещенным на шаг перемещения относительно основания 19. Далее цикл повторяется.
Для перемещения иглы по оси Z на контакты диска 16 с пружиной 15 и параллелепипеда 14 подается фиксирующая разность потенциалов, а на соответствующие секции обкладок 23,24 подается пилообразное напряжение и трубка 18 удлиняется или укорачивается, вследствие чего игла 9 перемещается по вертикальной оси. После сброса напряжения с обкладок 23,24 и фиксирующего напряжения с контактов диска 16 и параллелепипеда 14 верхний торец трубки 18 возвращается в первоначальное положение, при этом происходит инерционное проскальзывание параллелепипеда 14 с иглой 9 в пружинных зажимах 15. Далее цикл повторяется. После грубого сближения иглы 9 и образца 21 головка 1 СТМ начинает работать в режиме сканирования исследуемого участка. Режим сканирования осуществляет пьезопреобразователь 20 путем подачи соответствующих напряжений на его обкладки.
Реферат
Использование: для топографии и анализа состав поверхности. Сущность изобретения: комбинированный сканирующий - растровый электронный микроскоп (СТМ-РЭМ) содержит вакуумную камеру, в которой размещена головка СТМ со столиком для установки образца, при этом РЭМ и СТМ подключены к блоку управления, обеспечивающего их совместную работу, а грубый привод перемещения иглы головки СТМ выполнен в виде параллелепипеда, закрепленного посредством электростатических зажимов, соединенных с металлическим диском, который зажат через изолирующие прокладки в металлических шайбах, закрепленных на верхнем торце трубчатого пьезопривода грубого перемещения. 4 ил.
Комментарии